1. Introduction
The operation of power systems relies on communications networks, which themselves rely on the power supply, so that power systems and their communications networks form a mutually dependent cyber-physical system. However, loss of communication can lead to power failures and power failures can lead to loss of communications, with consequential cascading failures [
1]. Disasters can cause severe damage to the communications networks and also cause overload situations due to the high demand for communications during emergencies. Hybrid redundant communications systems [
2] can fail if the redundant systems both depend on the grid power supply.
The aim of this paper is to show how 5G/LTE-based PLMNs can provide reliable communications in a microgrid during blackouts. Existing works on reliability of communications in power grids and microgrids do not address communication systems that continue to work with a widespread loss of mains power but assume that mains power is present [
2,
3,
4,
5].
In the context of a microgrid, having reliable communications during a blackout means that the microgrid can continue to manage itself during blackout, i.e., even when the distributed energy resources (DER) in the microgrid are connected to a de-energised grid, the distributed controllers at the DER sites can continue to communicate with each other. It was shown in [
6] how an islanded microgrid can recover from blackout on its own if its devices can communicate with each other. The approach of this paper is to use LTE/5G-based public land mobile networks (PLMN) to provide reliable communications for the exemplary microgrid blackout recovery use case. Being able to recover from blackout means that the failure modes of the power system and the communications system are decoupled, so that the cyber physical system (CPS) they form together is less vulnerable to catastrophic failure.
Our focus on how a particular concrete communications technology can be made reliable in the worst-case fills a gap in the existing work on communications reliability in smart grid applications in that it focuses on how to practically apply a specific technology to provide reliable communications in a specific use case.
The theoretical study of the topological conditions between power grid stability and communication failures performed in [
7] treats communication failures without considering their cause, developing a communications topology to cope with link failures. A distributed architecture for control of a distribution grid is presented in [
8], and the mitigation of failures of communications to devices at different levels of the control hierarchy is considered. However, neither of these works considers the case where there is a global communications failure, such as would occur in a blackout.
Communications reliability is treated in an undifferentiated way, i.e., considering the overall communications system reliability without considering reliability under different network operating conditions, but only the overall reliability requirements of different applications [
3]. There is, to the authors’ knowledge, no literature specifically considering communications reliability during blackout.
Equipping smart grid IoT devices with two UMTS Subscriber Identify Module (USIM) cards for different mobile networks will ensure continuity of service in case one network fails [
9], but this method would not work if a power outage affected both mobile networks.
Literature treating specific communication requirements of smart grid applications, such as latency [
4], implicitly assumes that the underlying basic communications system is actually working. This paper addresses the issue of actually ensuring a basic communications service during blackout.
Ultra-reliable communications (URC) in 5G wireless systems is discussed by Popovski [
10] outlines the problem of multiple devices trying to share communication resources but does not propose a solution and does not consider how to provide reliable communications during blackouts. Providing URC for services with different latency requirements is considered in [
11]. However, no distinction is made in URC literature between communication under normal power grid operation conditions and under blackout conditions.
The contribution of this paper is to show how LTE/5G PLMN communication can ensure reliable communications for selected MTC devices during emergency conditions, without giving these devices additional priority over other network users during normal conditions or adversely affecting the service to prioritised users during emergencies. This makes LTE/5G PLMN usable for critical applications where reliable communications are needed.
The paper demonstrates this by firstly developing the communication requirements to enable an islanded microgrid to recover from blackout (
Section 2). Then we examine how LTE/5G PLMN communication can ensure reliable communications for selected MTC devices during emergency conditions, without giving these devices additional priority over other network users during normal conditions or adversely affecting the service to prioritised users during emergencies (
Section 3). Then the use of one such LTE/5G communication feature, the PLMN-based Access Barring method, to achieve reliable MTC communication during blackout is demonstrated in a lab environment (
Section 4). Finally, we quantify the reduction in recovery time, using Continuous Time Markov Chain (CTMC) modelling of the recovery of the power and communications systems from blackout by conventional means compared to the autarkic microgrid-based approach (
Section 5).
4. Laboratory Test of PLMN-Based Access Barring for Communications Reliability during Blackout Recovery
The test system setup is shown in
Figure 2. The lab tests in this work mimic the situation where an LTE network provided by a telecom operator is shared between an Energy Utility’s MTC network and other users (including other MTC devices, normal Smartphone users and users with ACB > 10). The tests were performed using a commercially available LTE system, set up to make a private mobile network in a lab environment.
The Private LTE system consisted of Evolved Packed Core (EPC), which provided access to external packet IP networks and perform several core network related functions (e.g., QoS, security, mobility and terminal context management); User Data Consolidation (UDC), which provided management of subscription data; Radio and Transport components; Enterprise Operations Support System (E-OSS) which provided local operations for enterprises; Remote Radio Units and Indoor Radio Units for connecting to the user equipment. The private LTE system established data connectivity between the user equipment and a connected external (private) mobile network. The private LTE system connected with one antenna. It provided all the functionality of LTE but with a small footprint and compact deployment. The modulation technique used was adaptive modulation and coding (AMC), so that the exact modulation changes based on the radio signal strength, direction, distance of the user.
CAT-M1 functionality was not available in the test LTE network, so that the tests were limited to the PLMN Access Barring method.
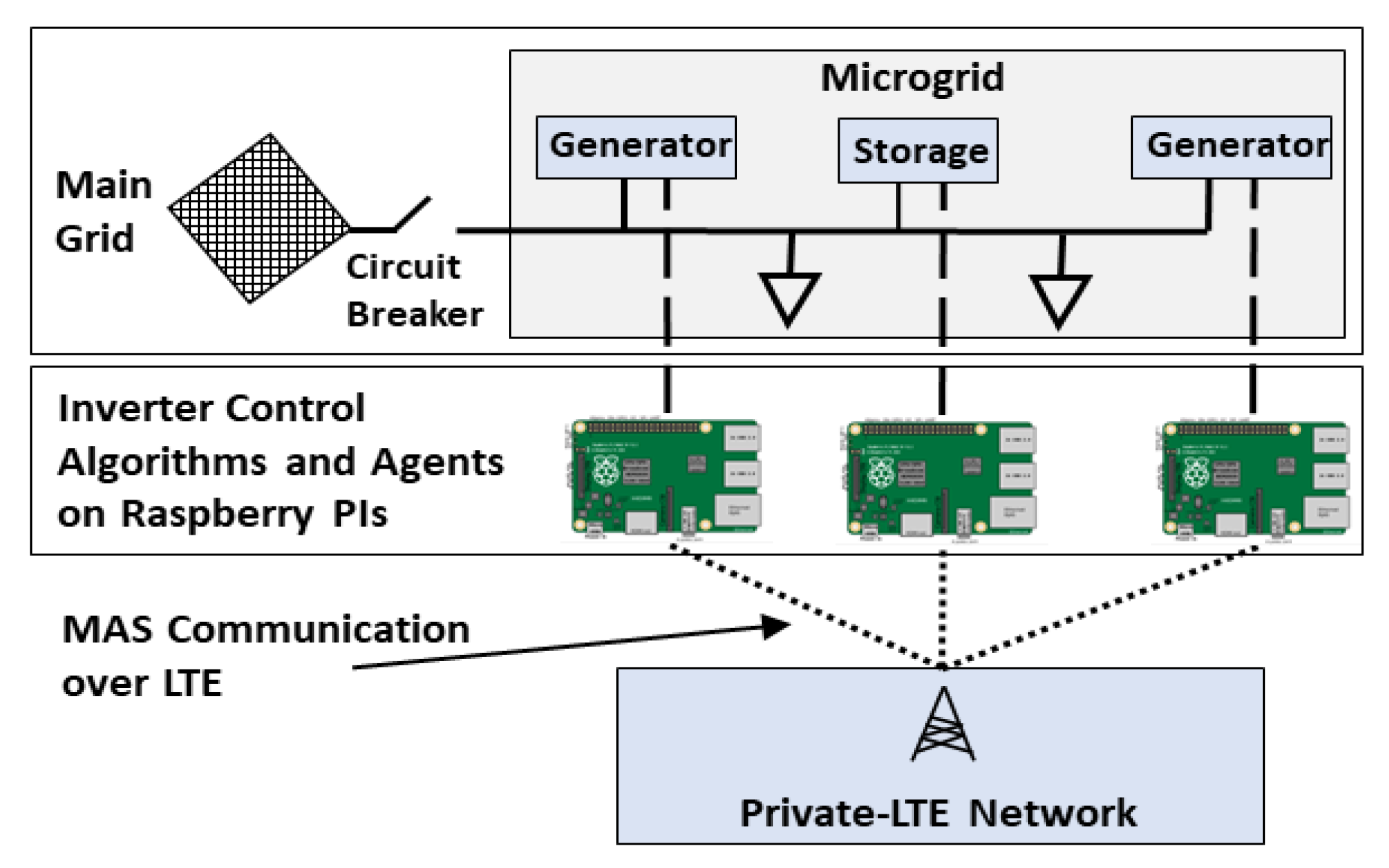
The test electrical DG grid is a real-time simulation of an AC microgrid, connected by a circuit breaker to the main grid. As tested, the microgrid consisted of four photovoltaic generators and four battery storage systems feeding four dynamic loads. The generators and storages are connected to the grid via inverters which implement a distributed consensus-based secondary control algorithm [
6]. The inverter control algorithms are implemented on Raspberry PI microcomputers which receive grid measurements from the grid simulation and send control signals back. Each inverter interfaces to an agent on the same Raspberry PI. The agents form a MAS, implemented using the Calvin framework [
18]. The Raspberry PIs have dongles through which the agents communicate peer-to-peer with each other over a private LTE network to implement the autarkic microgrid black start use case.
Two PLMNs are configured in a single network cell, the first PLMN serving the MAS MTC devices (instantiated in dongles inserted in the Raspberry PIs hosting the individual agents) and the second PLMN serving a number of normal smartphones. The MAS MTC devices are attached on PLMN1 and the smartphones on PLMN2. Then a simulated microgrid blackout was initiated. In the test, we assume that this blackout leads to emergency conditions in PLMN2, leading to blocking of normal subscribers by setting the Barring Factor to 0 for ACs 0 to 9. In PLMN1, no ACB restrictions were set for the MAS MTC devices during the blackout emergency.
The observed result was that only PLMN1 UEs i.e., MAS MTC devices could access the cell, and that PLMN2 UEs were barred from accessing the network. The tests confirmed that, by having a shared LTE network environment with two separate PLMNs configured in the network cell, different Access Barring treatment can be provided to different UEs registered in different PLMNs by broadcasting different Access Barring factors to the different PLMNs’ devices.
The lab tests confirmed that the method enables the MAS MTC devices to receive temporary preferential treatment under particular emergency circumstances so as to be able to continue to communicate with each other during the blackout, enabling a black start to be performed in the islanded microgrid.
Author Contributions
Conceptualization, P.M., A.S. and S.R.; methodology, P.M., A.S. and S.R.; software, A.S. and Z.M.; validation, A.S. and Z.M.; formal analysis, A.S.; investigation, P.M., A.S. and S.R.; resources, S.R.; data curation, A.S., Z.M.; writing—original draft preparation, P.M., A.S.; writing—review and editing, P.M.; visualization, P.M., A.S.; supervision, P.M.; project administration, P.M.; funding acquisition, A.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the German Ministry for Industry and Energy, grant number 03ET7549A).
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Wang, Z.; Chen, G.; Liu, L.; Hill, D.J. Cascading risk assessment in power-communication interdependent networks. Physics A 2020, 540, 120496. [Google Scholar] [CrossRef]
- Gungor, V.; Sahin, D.; Kocak, T.; Ergut, S.; Buccella, C.; Cecati, C.; Hancke, G.P. Smart Grid Technologies: Communication Technologies and Standards. IEEE Trans. Ind. Inform. 2011, 7, 529–539. [Google Scholar] [CrossRef] [Green Version]
- Ghorbanian, M.; Dolatabadi, S.; Masjedi, M.; Siano, P. Communication in Smart Grids: A Comprehensive Review on the Existing and Future Communication and Information Infrastructures. IEEE Syst. J. 2019, 13, 4001–4014. [Google Scholar] [CrossRef]
- Gungor, V.; Sahin, D.; Kocak, T.; Ergut, S.; Buccella, C.; Cecati, C.; Hancke, G.P. A Survey on Smart Grid Potential Applications and Communication Requirements. IEEE Trans. Ind. Inform. 2013, 9, 28–42. [Google Scholar] [CrossRef] [Green Version]
- Kim, M. A survey on guaranteeing availability in smart grid communications. In Proceedings of the 2012 14th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 19–22 February 2012; pp. 314–317. [Google Scholar]
- McKeever, P.; De Din, E.; Sadu, A.; Monti, A. MAS for automated black start of multi-microgrids. In Proceedings of the 2017 IEEE International Conference on Smart Grid Communications (SmartGridComm), Dresden, Germany, 23–27 October 2017; pp. 32–37. [Google Scholar]
- Nazari, M.; Wang, L.; Grijalva, S.; Egerstedt, M. Communication-Failure-Resilient Distributed Frequency Control in Smart Grids: Part I: Architecture and Distributed Algorithms. IEEE Trans. Power Syst. 2020, 35, 1317–1326. [Google Scholar] [CrossRef]
- Palaniappan, R.; Funke, A.; Hilbrich, D.; Bauernschmitt, B.; Rehtanz, C. A robust and resilient voltage control strategy for smart grids using distributed measurements. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2411–2415. [Google Scholar]
- Chen, L.; Dong, X.; Kuang, X.; Chen, B.; Hong, D. Towards Ubiquitous Power Distribution Communication: Multi-service Access and QoS Guarantees for IoT Applications in Smart Grid. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 894–898. [Google Scholar]
- Popovski, P. Ultra-reliable communication in 5G wireless systems. In Proceedings of the 1st International Conference on 5G for Ubiquitous Connectivity, Akaslompolo, Finland, 26–28 November 2014; pp. 146–151. [Google Scholar]
- Kalor, A.; Popovski, P. Ultra-Reliable Communication for Services with Heterogeneous Latency Requirements. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Ali, S. Next Generation and Advanced Network Reliability Analysis Using Markov Models and Software Reliability Engineering; Springer Nature Switzerland AG: Basel, Switzerland, 2019. [Google Scholar]
- Gazis, V. A Survey of Standards for Machine-to-Machine and the Internet of Things. IEEE Commun. Surv. Tutor. 2017, 19, 482–511. [Google Scholar] [CrossRef]
- 3GPP. Technical Specifications and Technical Reports for a UTRAN-Based 3GPP system (Release 8); 3rd Generation Partnership Project (3GPP): Sophia Antipolis, France, 2012. [Google Scholar]
- 3GPP. Technical Specification Group Services and System Aspects (Rel 13); 3rd Generation Partnership Project (3GPP): Sophia Antipolis, France, 2016. [Google Scholar]
- Aoyagi, K.; Hapsari, W.; Takeda, S.; Tanaka, I. Access Class Control Technology in LTE/LTE Advanced Systems. NTT DOCOMO Tech. J. 2015, 17, 65–76. [Google Scholar]
- Oueis, J.; Conan, V.; Lavaux, D.; Stanica, R.; Valois, F. Overview of LTE Isolated E-UTRAN Operation for Public Safety. IEEE Commun. Stand. Mag. 2017, 1, 98–105. [Google Scholar] [CrossRef]
- Sadu, A.; Ostendorf, L.; Lipari, G.; Ponci, F.; Monti, A. Resilient design of distribution grid automation system with CALVIN. In Proceedings of the 2018 IEEE International Energy Conference (ENERGYCON), Limassol, Cyprus, 3–7 June 2018. [Google Scholar]
- Sadu, A.; Roy, G.; Ponci, F.; Monti, A. Methodology for Reliability Analysis of Cyber-Physical MTdc Grids. IEEE J. Emerg. Sel. Top. Power Electron. 2020. [Google Scholar] [CrossRef]
- UCTE. Final Report of the Investigation Committee on the 28 September 2003 Blackout in Italy; Union for the Co-ordination of Transmission of Electricity (UCTE): Brussels, Belgium, 2004. [Google Scholar]
- DeBlasio, A.J.; Regan, T.J.; Zirker, M.E.; Fichter, K.S.; Lovejoy, K. Effects of Catastrophic Events on Transportation Systems Management and Operations—August 2003 Blackout Great Lakes Region; U.S. Department of Transportation: Cambridge, MA, USA, 2004. [Google Scholar]
- Anghel, M.; Werley, K.; Motter, A. Stochastic Model for Power Grid Dynamics. In Proceedings of the 2007 40th Annual Hawaii International Conference on System Sciences (HICSS’07), Waikoloa, HI, USA, 3–6 January 2007. [Google Scholar]
- Dharmaraja, S.; Jindal, V.; Varshney, U. Reliability and Survivability Analysis for UMTS Networks: An Analytical Approach. IEEE Trans. Netw. Serv. Manag. 2008, 5, 132–142. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}