
Fault-Tolerant Control of a Three-Phase Permanent Magnet Synchronous Motor for Lightweight UAV Propellers via Central Point Drive


Abstract
:1. Introduction
1.1. Research Context
1.2. Motivation of the Research
2. Materials and Methods
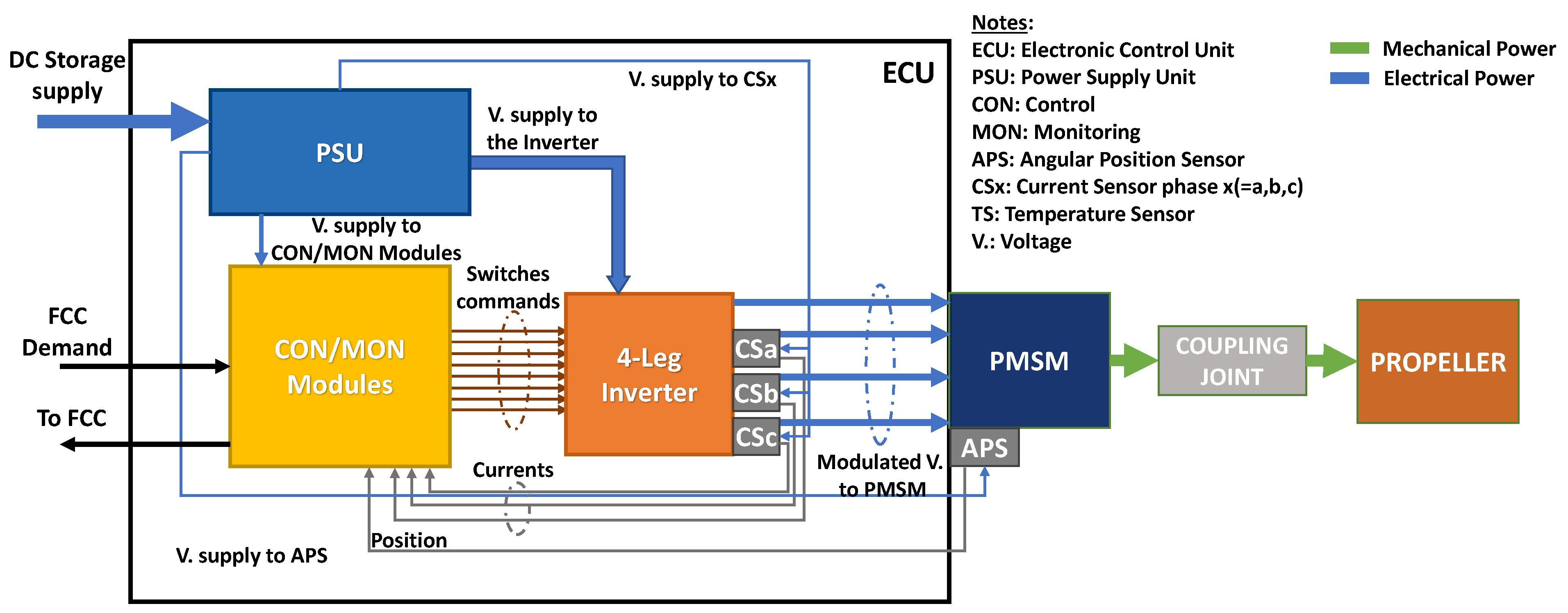
2.1. System Description
- ➢
- An electromechanical section, with:
- ○
- Three-phase PMSM, with surface-mounted magnets and phases in Y connection;
- ○
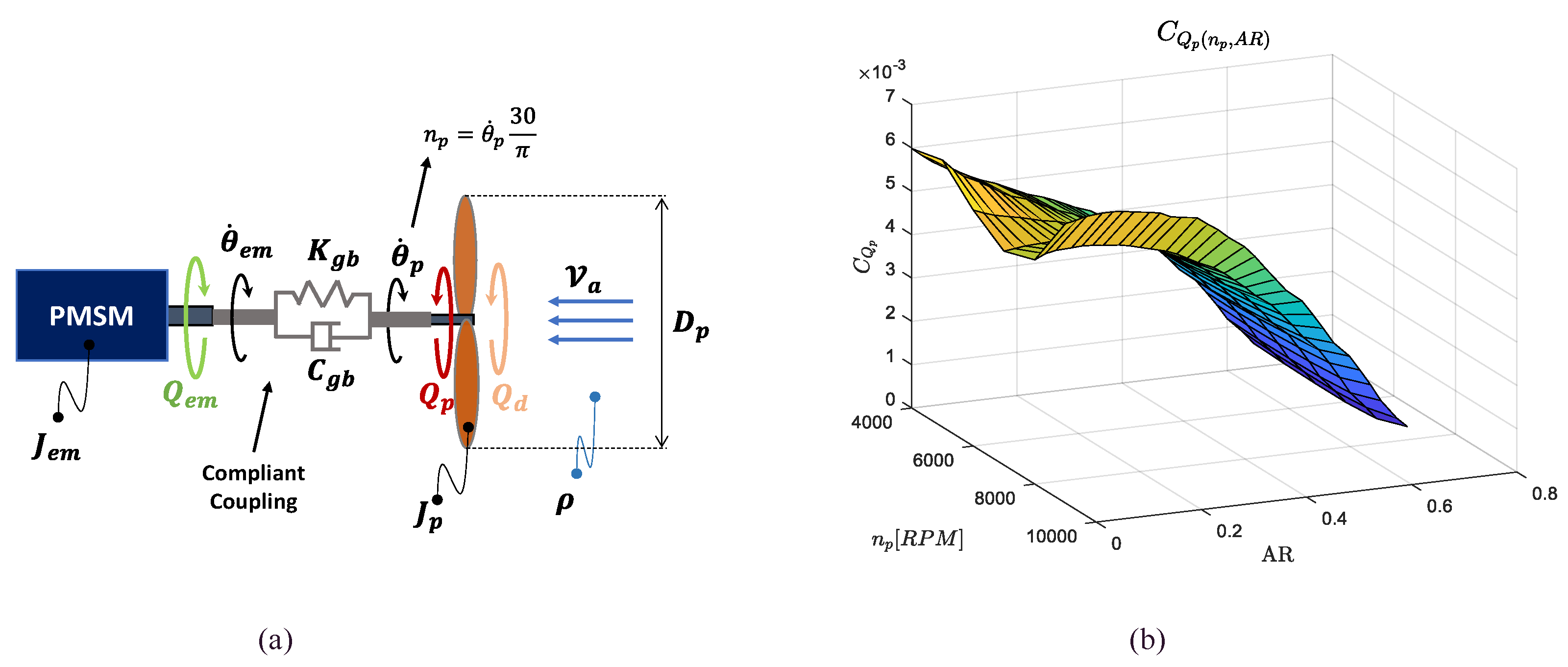
- Twin fixed-pitch propeller (APC22x10E [29]);
- ○
- Mechanical coupling joint.
- ➢
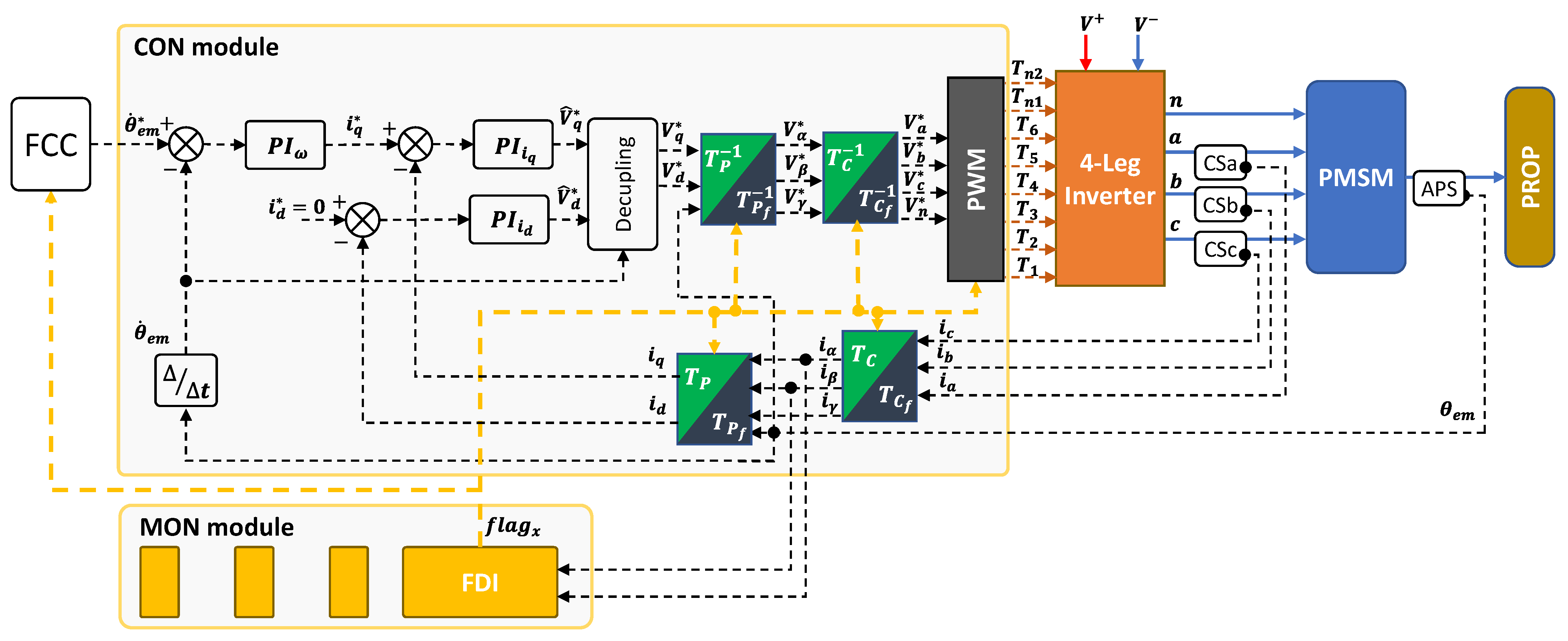
- An Electronic Control Unit (ECU), including:
- ○
- Control/monitoring (CON/MON) module, for the implementation of the closed-loop control and health-monitoring functions;
- ○
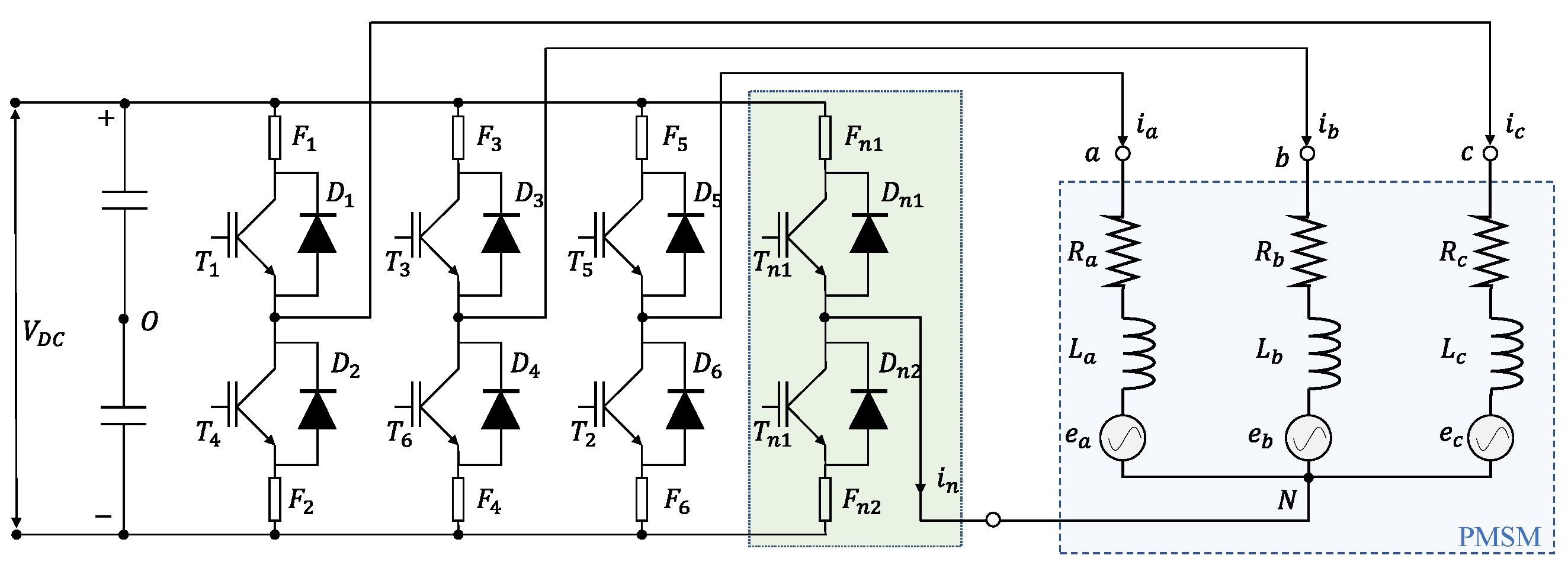
- Motor inverter with four-leg architecture;
- ○
- Three Current Sensors (CSa, CSb, CSc), one per each motor phase;
- ○
- Angular Position Sensor (APS), measuring the motor angle;
- ○
- Power Supply Unit (PSU), converting the 48 VDC input coming from the UAV energy storage system for all components and sensors.
2.2. Aerodynamic and Mechanical Section Modelling
2.3. PMSM Modelling
- Negligible magnetic nonlinearities of ferromagnetic parts (i.e., hysteresis, saturation);
- The motor is magnetically symmetric with respect to its phases;
- The permanent magnets are surface-mounted and made of rare-earth materials—the magnet reluctance along the quadrature axis is infinite with respect to the one along the direct axis;
- Negligible magnetic coupling among phases;
- Negligible reluctances of ferromagnetic parts;
- Negligible magnetic flux dispersion (i.e., secondary magnetic paths, iron losses).
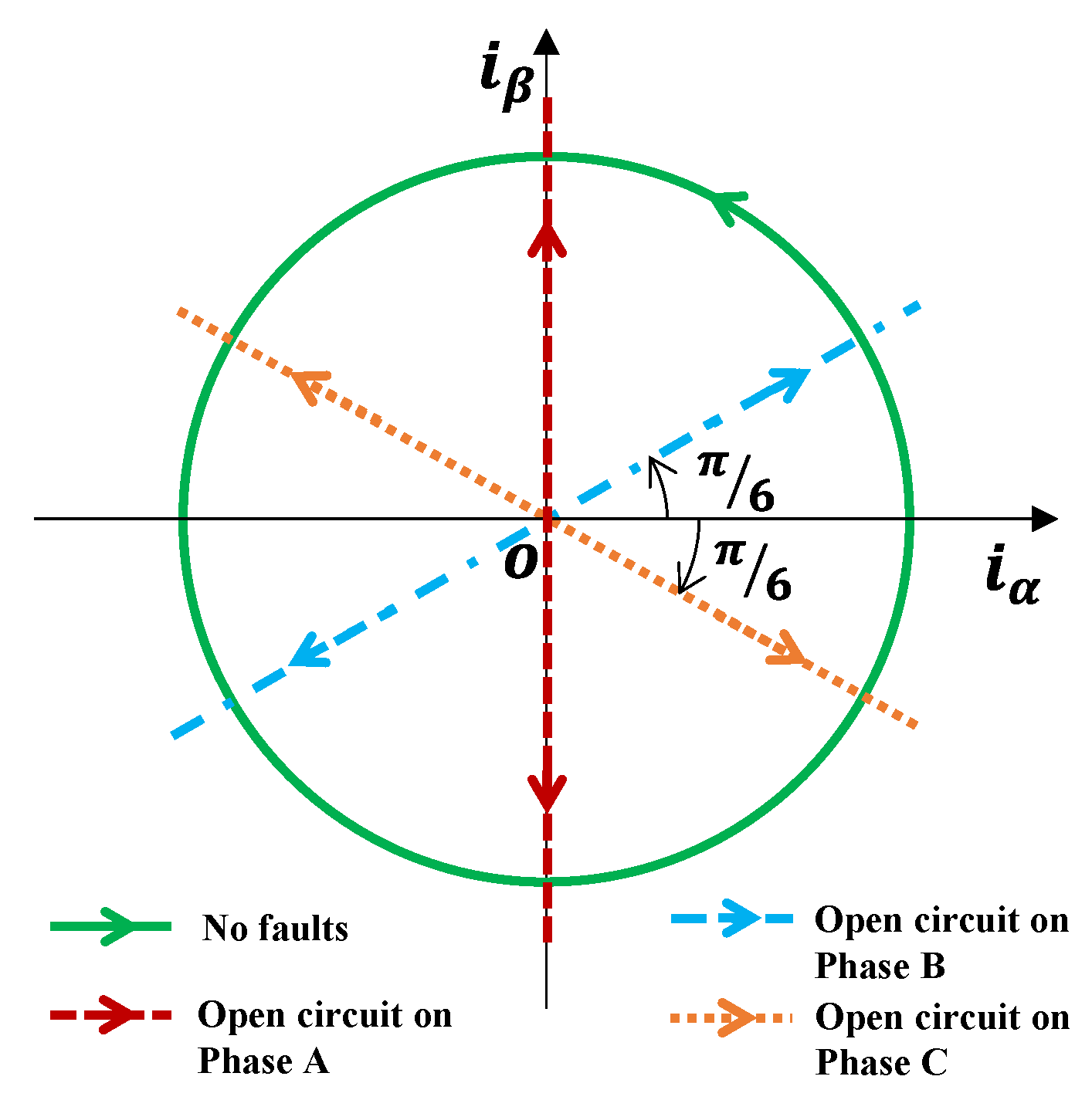
- The Clarke transform, which defines them into an orthonormal reference frame having the axis aligned with phase a;
- The Park transform, which defines them into a rotating orthonormal reference frame having the axis aligned with the direct axis of the rotor magnet.
2.4. Fault-Tolerant Control Strategy
- ➢
- FDI algorithm, performing the fault detection (i.e., the process of identifying a malfunction or deviation from expected behaviour by processing measurements or estimations) and the fault isolation (i.e., the process of determining the fault mode that is responsible for the deviation from expected behaviour);
- ➢
- Fault accommodation algorithm, performing the adaptation of the control laws to maintain adequate performances if a major fault is detected.
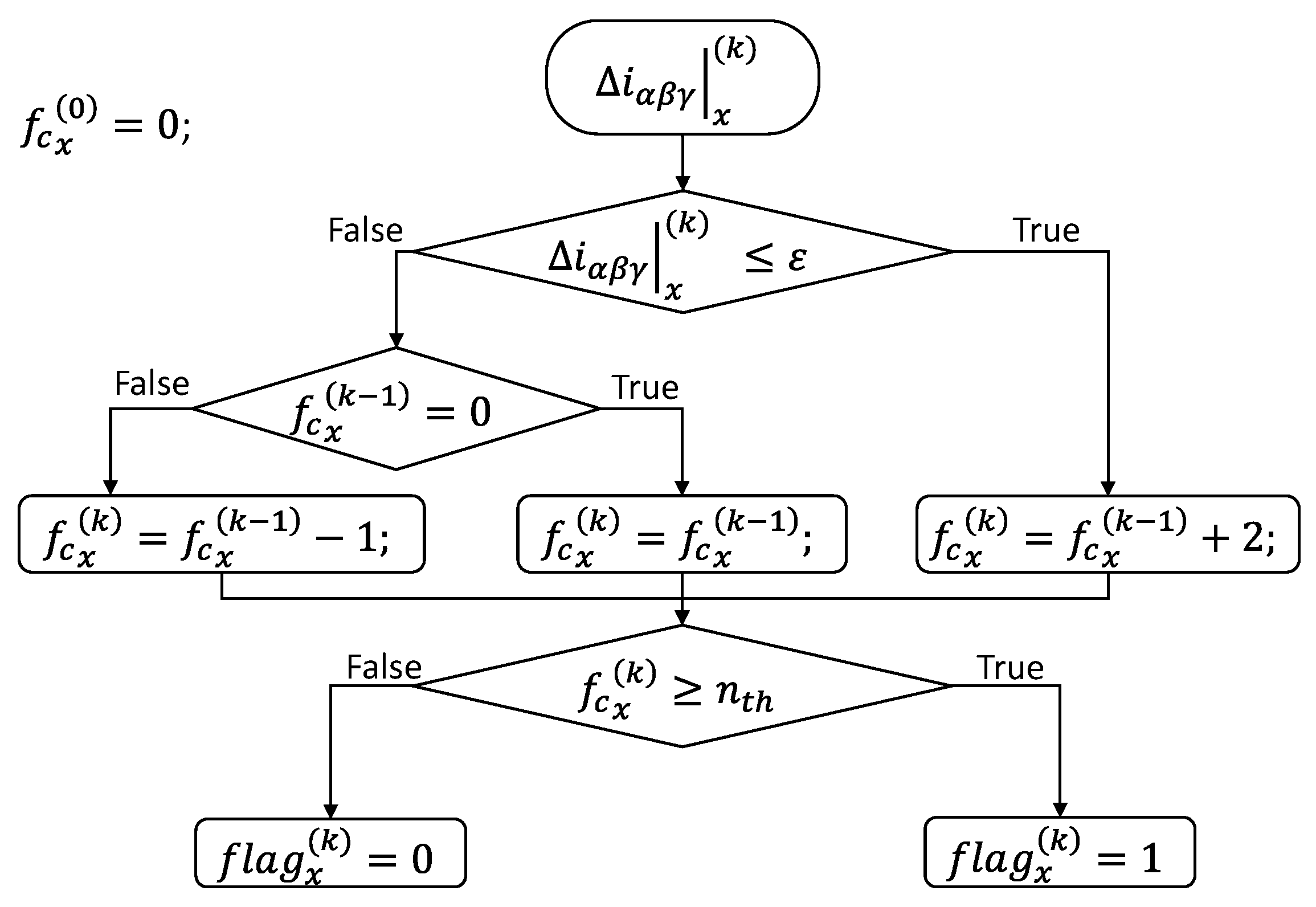
2.4.1. FDI Algorithm
- i.
- Fault Detection Logic (FDL);
- ii.
- Fault Isolation Logic (FIL).
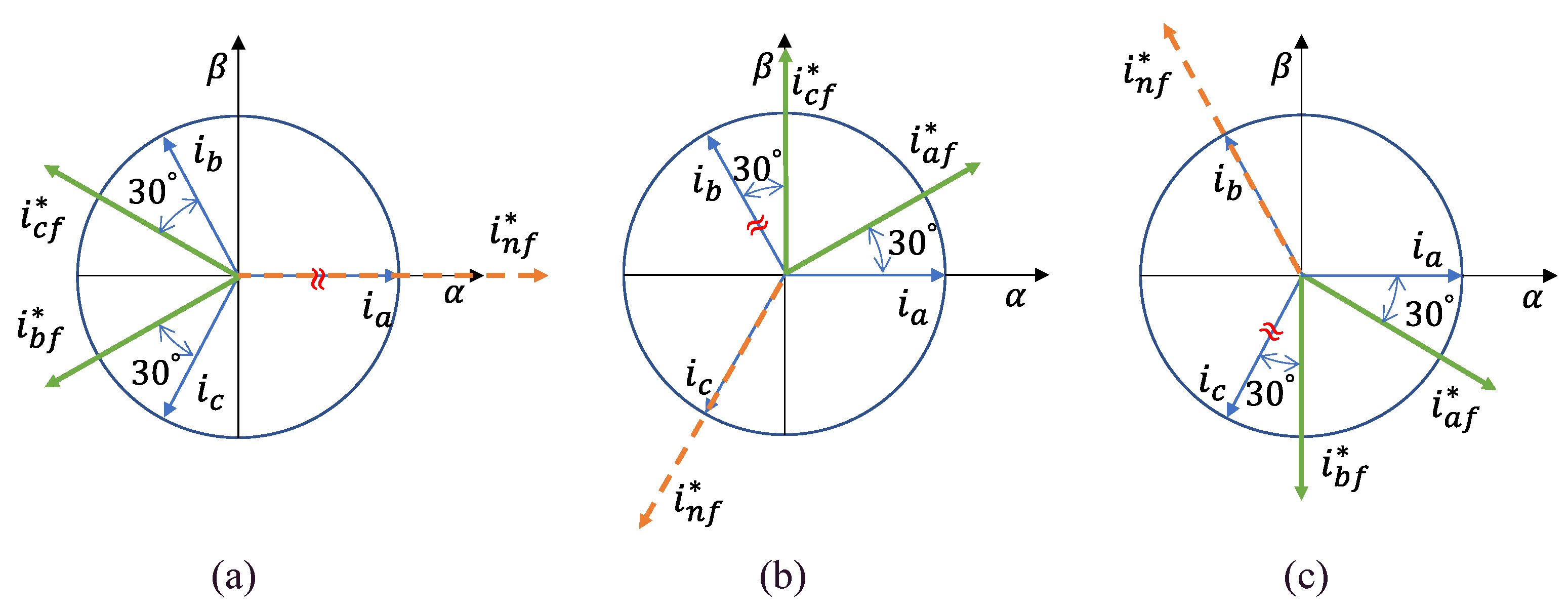
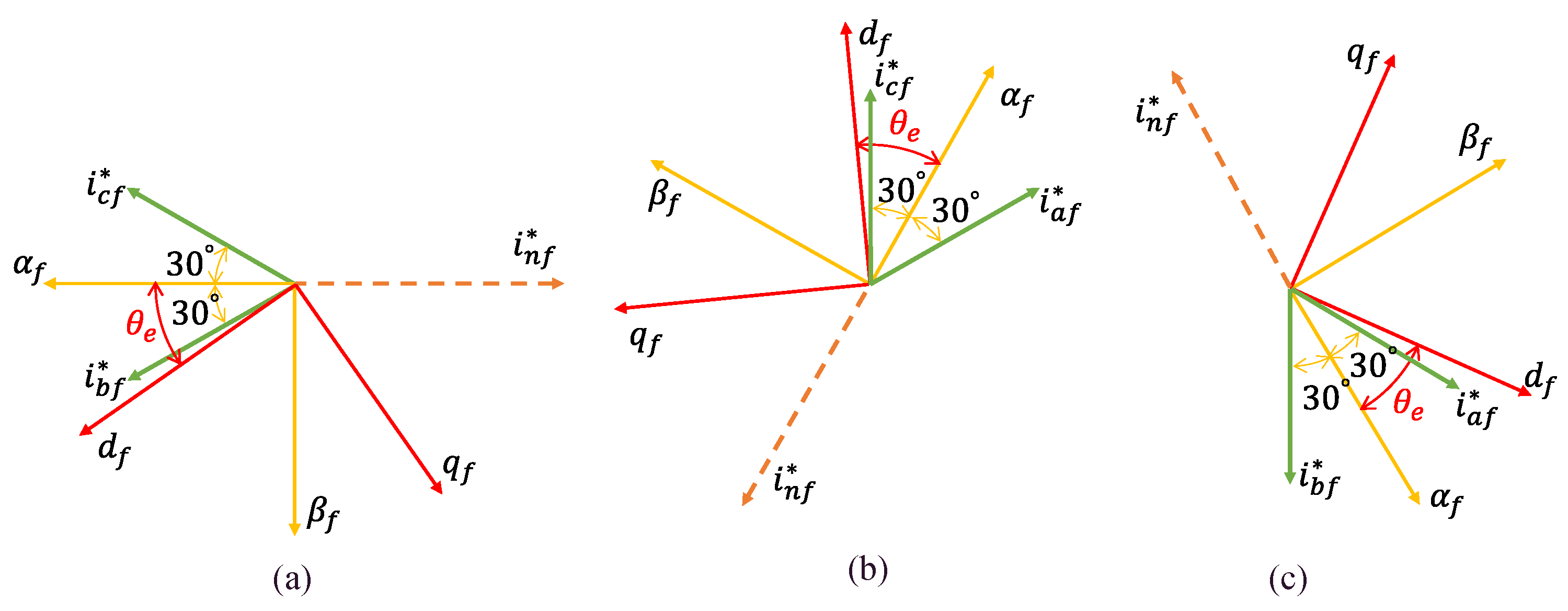
2.4.2. Fault Accommodation Algorithm
- From the planar reference (), to a planar reference frame (), in which the axis has opposite direction wrt the neutral current axis ;
- From the planar reference () to a planar rotating frame (), defined hereafter.
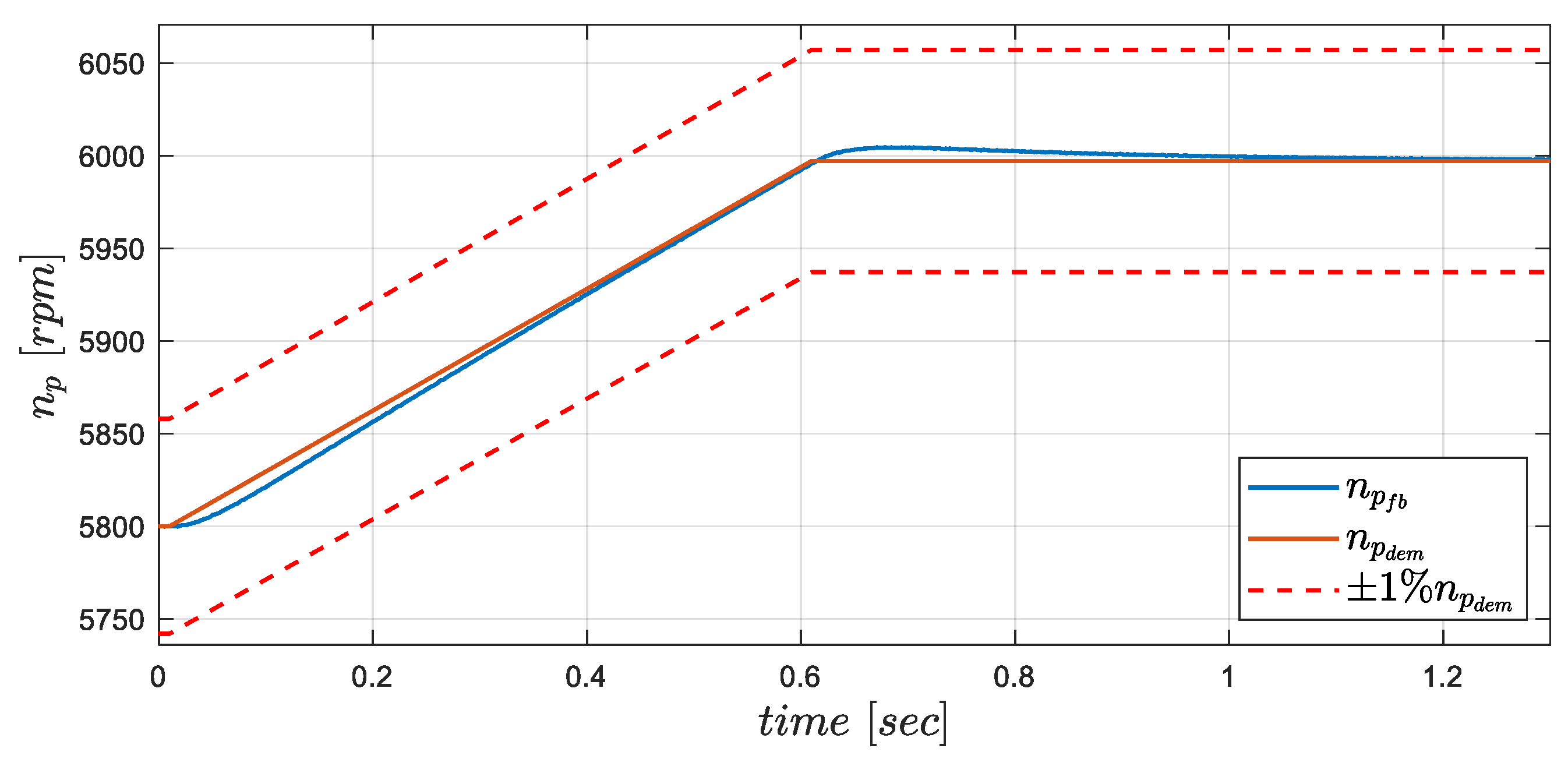
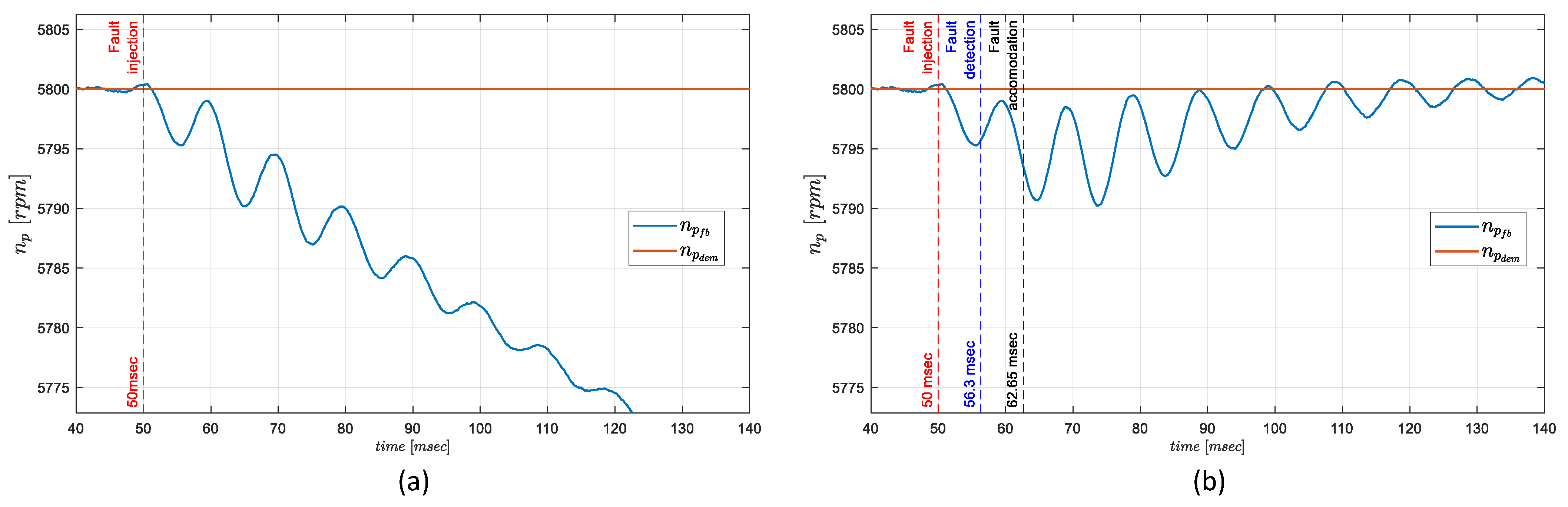
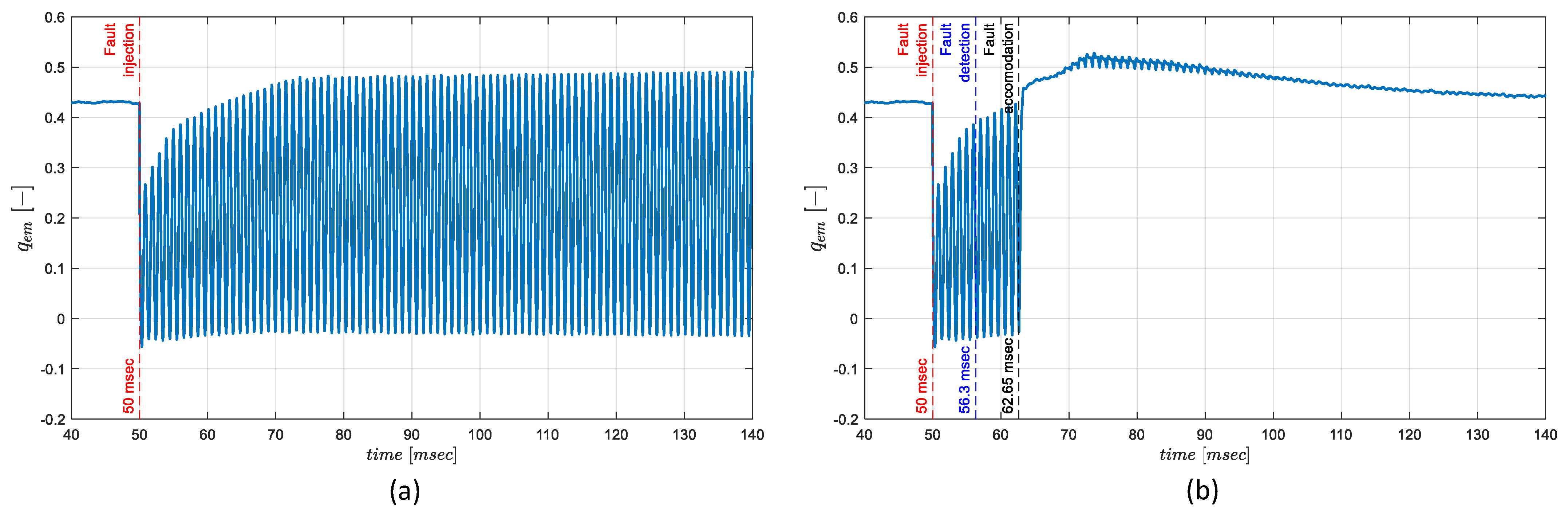
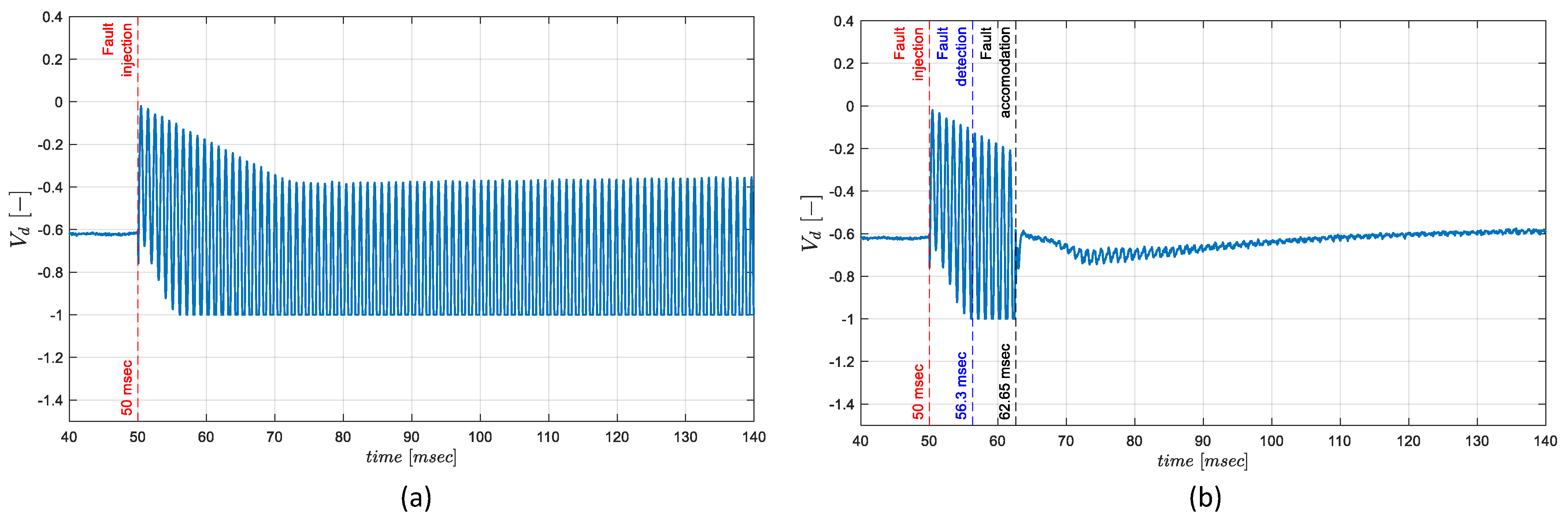
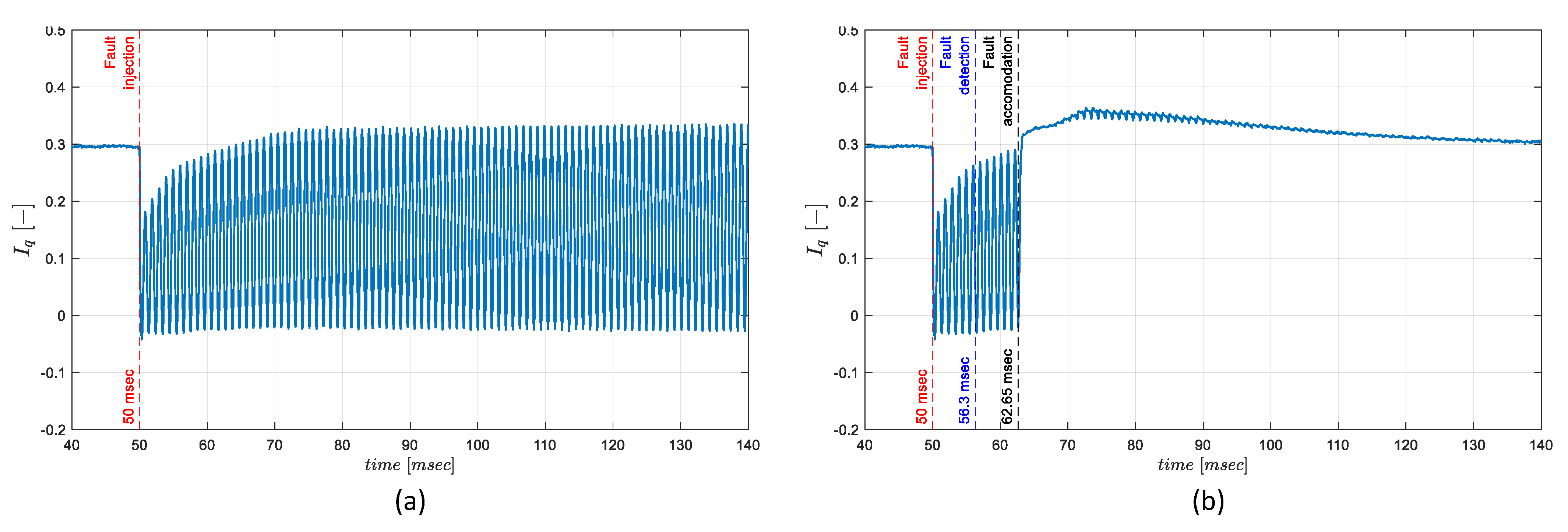
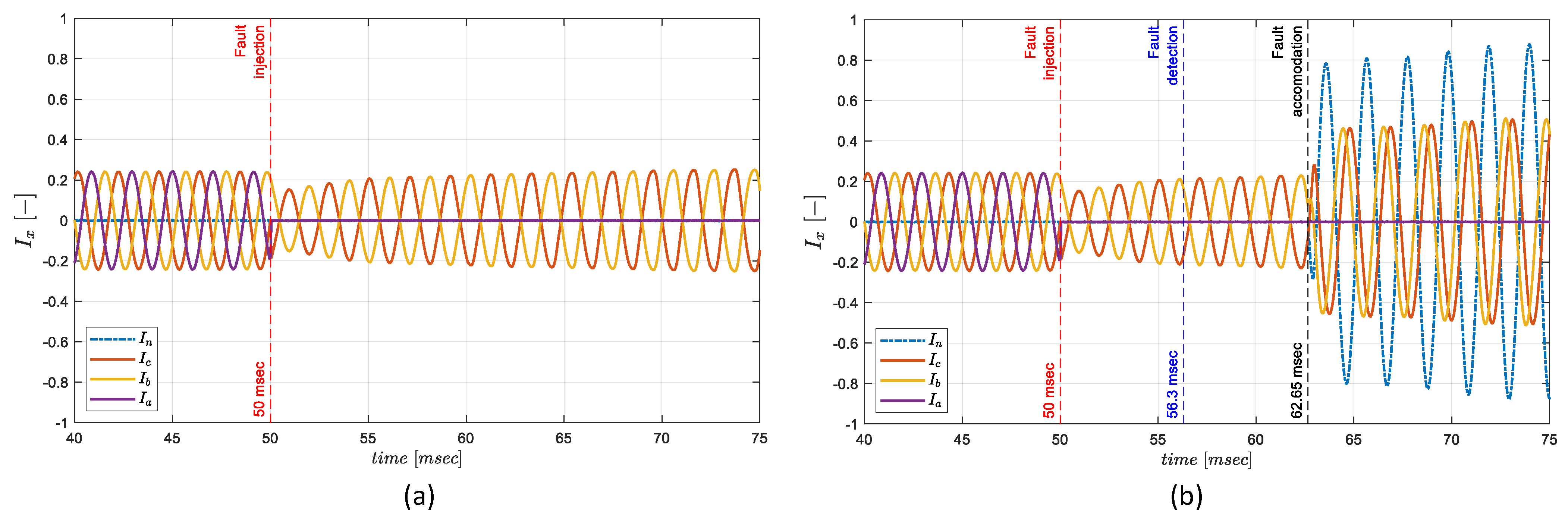
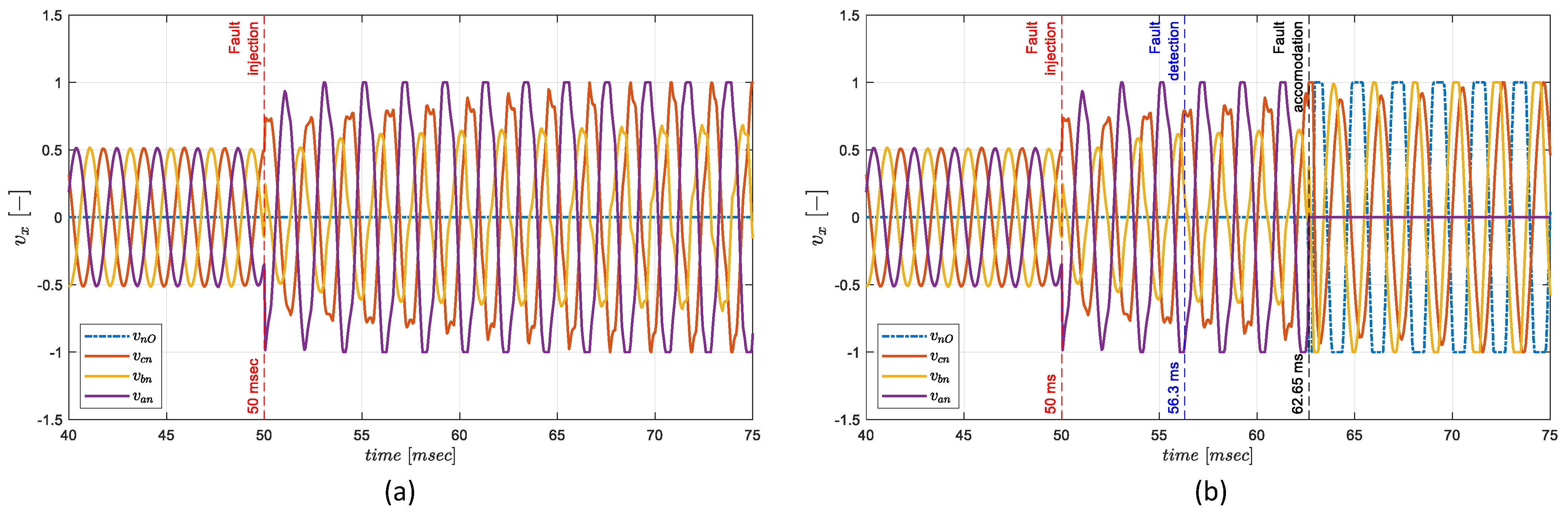
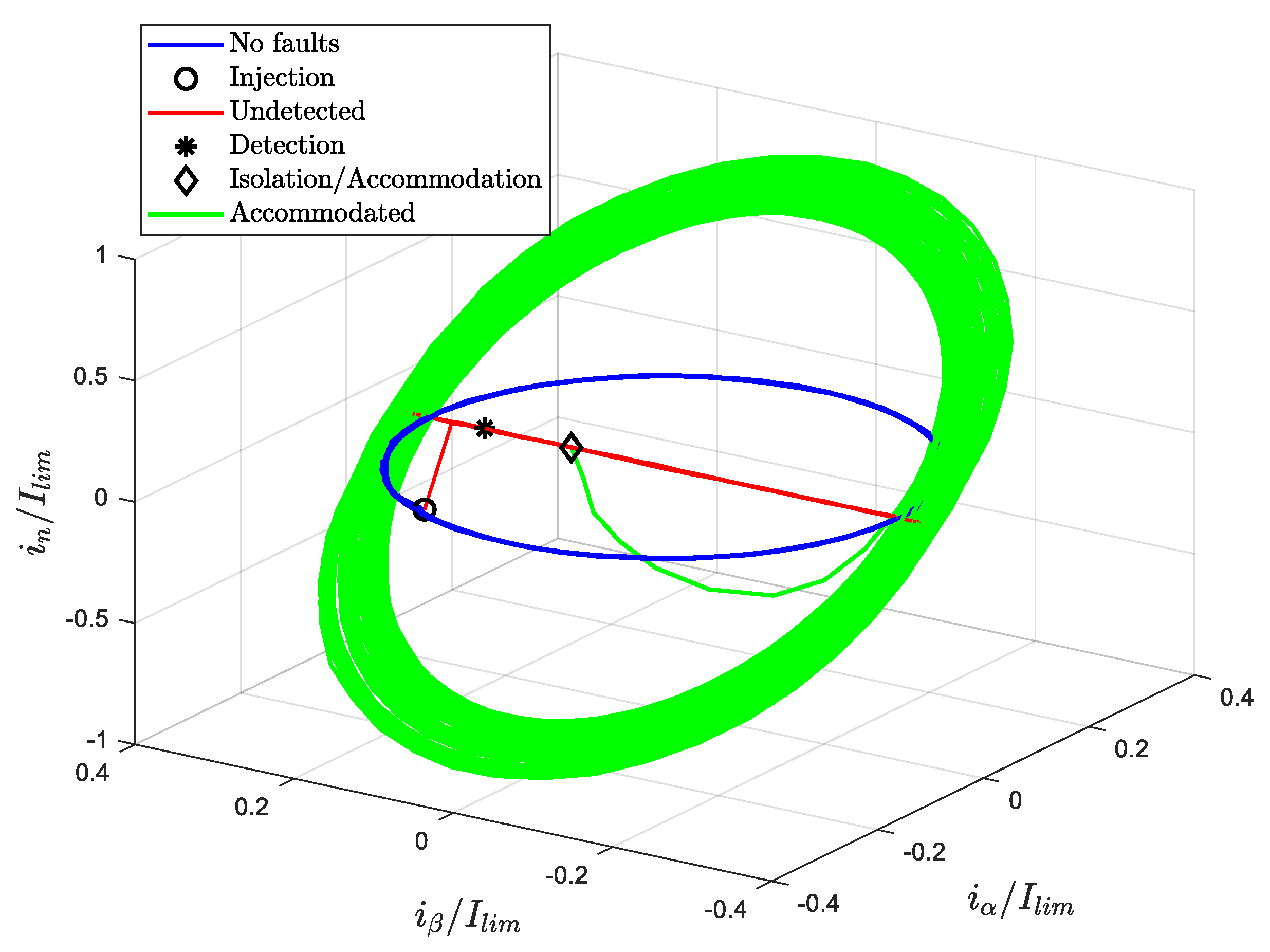
3. Results
3.1. Failure Transients Characterisation
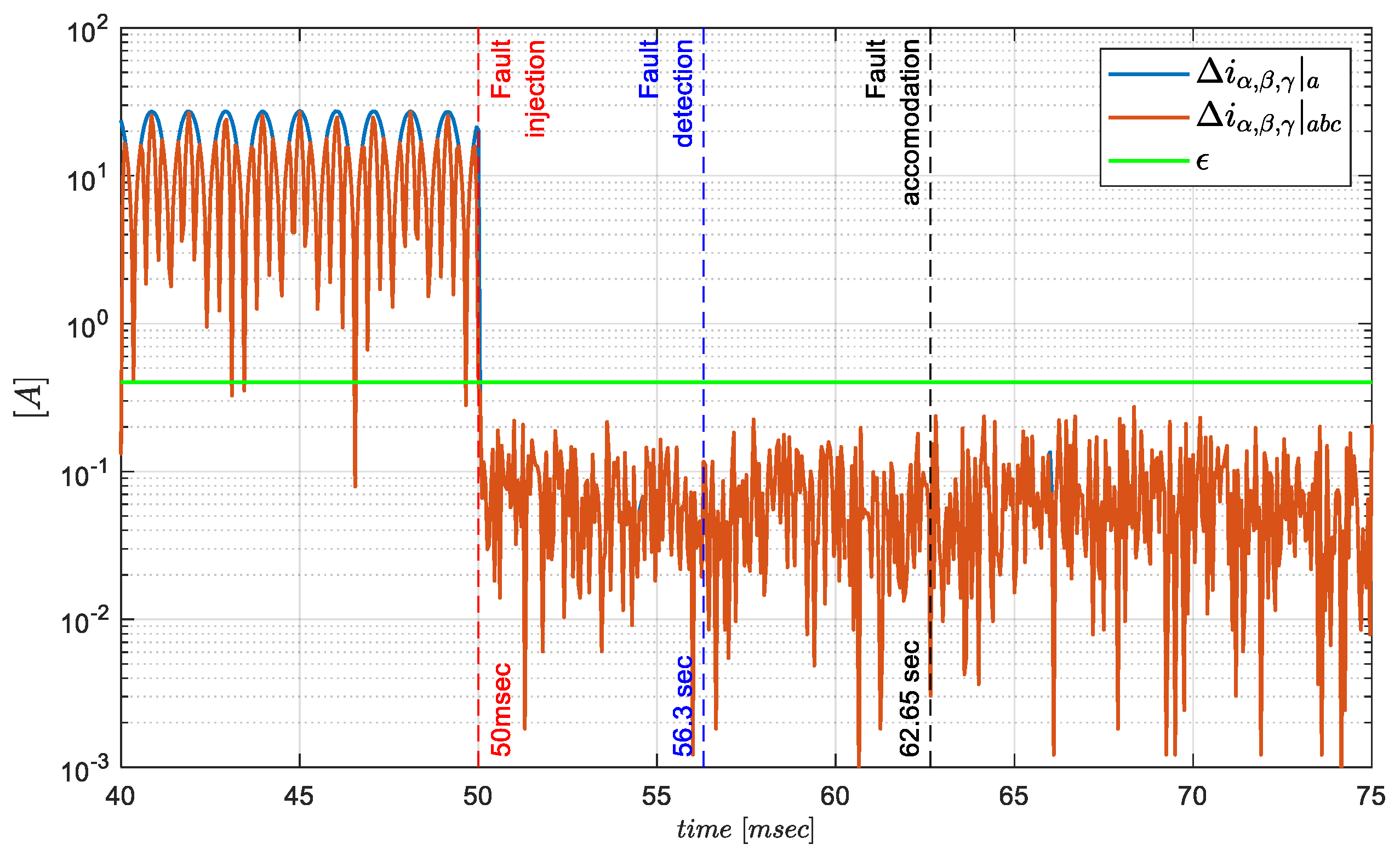
3.2. FDI Parameters Definition
4. Discussion
- The CSnD FDI algorithm provides the smallest ratio between detection latency and monitoring samples per electrical period;
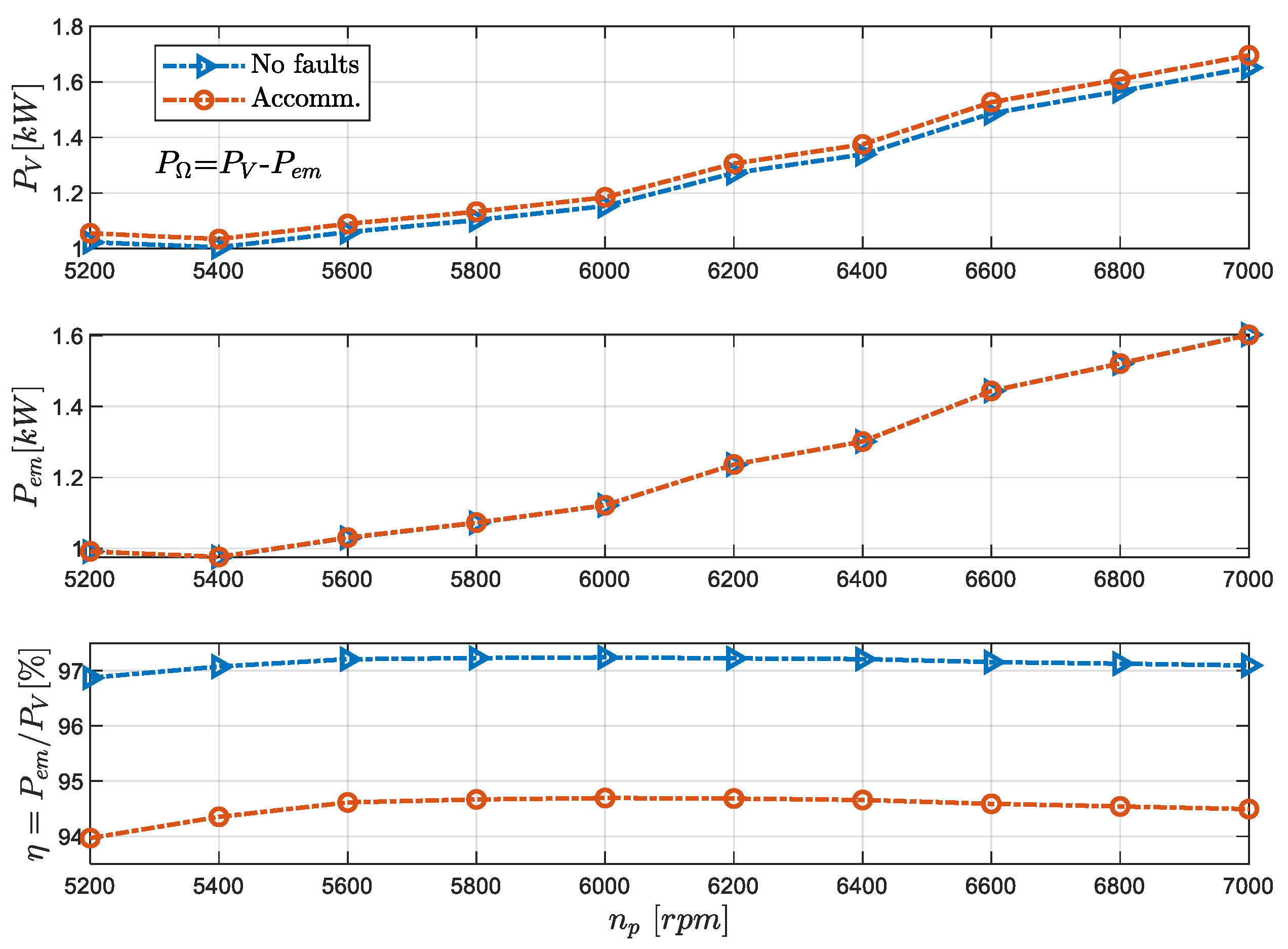
- The fault accommodation technique provides very satisfactory torque performances without implementing control laws reconfiguration or feedforward compensation in the closed-loop architecture.
- Experimental testing, aiming to
- ○
- validate the model predictions in case of faults (by excluding the FTC),
- ○
- characterise the fault accommodation latencies (by “forcing” its activation without faults).
- Enhanced simulation analysis, including the detailed modelling of the MOSFET power bridge, to refine the predictions of failure transients.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Symbol | Value | Unit |
|---|---|---|---|
| Phase resistance | R | 0.04 | Ω |
| Phase inductance | L | 2 × 10−3 | H |
| Pole pairs | nd | 5 | - |
| Torque constant | kt | 0.13 | Nm/A |
| Electric constant | ke | 0.0531 | V/(rad/s) |
| Permanent magnet flux linkage | λm | 0.0106 | Wb |
| Maximum peak current | Ilim | 92 | A |
| Maximum peak output voltage | Vlim | 270 | V |
| Rotor inertia | Jem | 5.4 × 10−3 | kg·m2 |
| Propeller diameter | Dp | 0.5588 | m |
| Propeller inertia | Jp | 1.62 × 10−2 | kg·m2 |
| Joint stiffness | Kgb | 1.598 × 103 | Nm/rad |
| Joint damping | Cgb t | 0.2545 | Nm/(rad/s) |
| Definition | Symbol | Value | Unit |
|---|---|---|---|
| Sampling frequency | fFDI | 20 | kHz |
| Fault counter threshold | nth | 250 | - |
| Current error threshold | ε | 0.4 | A |
| Definition | Symbol | Value | Unit |
|---|---|---|---|
| Cruise speed | np|cruise | 5800 | rpm |
| Cruise torque | Qp|cruise | 1.78 | Nm |
| Cruise power | Pp|cruise | 1100 | W |
| Climb speed | np|climb | 7400 | rpm |
| Climb torque | Qp|climb | 4.12 | Nm |
| Climb power | Pp|climb | 3238 | W |
References
- “Unmanned Aerial Vehicle (UAV) Market by Point of Sale, Systems, Platform (Civil & Commercial, and Defense & Governement), Function, End Use, Application, Type, Mode of Operation, MTOW, Range, and Region—Global Forecast to 2026”; RESEARCH AND MARKETS; 16 December 2020; Available online: https://www.researchandmarkets.com/reports/5350868/unmanned-aerial-vehicle-uav-market-by-point-of#src-pos-1 (accessed on 7 September 2021).
- Suti, A.; Di Rito, G.; Galatolo, R. Climbing performance enhancement of small fixed-wing UAVs via hybrid electric propulsion. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021. [Google Scholar] [CrossRef]
- Mamen, A.; Supatti, U. A Survey of Hybrid Energy Storage Systems Applied for Intermittent Renewable Energy Systems. In Proceedings of the 14th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Phuket, Thailand, 27–30 June 2017. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Kontarček, A.; Bajec, P.; Nemec, M.; Ambrožič, V.; Nedeljković, D. Cost-Effective Three-Phase PMSM Drive Tolerant to Open-Phase Fault. IEEE Trans. Ind. Electron. 2015, 62, 6708–6718. [Google Scholar] [CrossRef]
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of Electric Motor Technologies Used for More Electric Aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar] [CrossRef]
- Khalaief, A.; Boussank, M.; Gossa, M. Open phase faults detection in PMSM drives based on current signature analysis. In Proceedings of the XIX International Conference on Electrical Machines (ICEM 2010), Roma, Italy, 6–8 September 2010. [Google Scholar] [CrossRef]
- Li, W.; Tang, H.; Luo, S.; Yan, X.; Wu, Z. Comparative analysis of the operating performance, magnetic field, and temperature rise of the three-phase permanent magnet synchronous motor with or without fault-tolerant control under single-phase open-circuit fault. IET Electr. Power Appl. 2021, 15, 861–872. [Google Scholar] [CrossRef]
- Ryu, H.-M.; Kim, J.-W.; Sul, S.-K. Synchronous-frame current control of multiphase synchronous motor under asymmetric fault condition due to open phases. IEEE Trans. Ind. Appl. 2006, 42, 1062–1070. [Google Scholar] [CrossRef]
- Liu, G.; Lin, Z.; Zhao, W.; Chen, Q.; Xu, G. Third Harmonic Current Injection in Fault-Tolerant Five-Phase Permanent-Magnet Motor Drive. IEEE Trans. Power Electron. 2018, 33, 6970–6979. [Google Scholar] [CrossRef]
- Bennet, J.W.; Mecrow, B.C.; Atkinson, D.J.; Atkinson, G.J. Safety-critical design of electromechanical actuation systems in commercial aircraft. IET Electr. Power Appl. 2009, 5, 37–47. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Fault Diagnosis and Condition Monitoring Approaches. In Electro-Mechanical Actuators for the More Electric Aircraft; Advances in Industrial Control; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- de Rossiter Correa, M.B.; Jacobina, C.B.; Da Silva, E.C.; Lima, A.N. An Induction Motor Drive System with Improved Fault Tolerance. IEEE Trans. Ind. Appl. 2001, 37, 873–879. [Google Scholar] [CrossRef]
- Ribeiro, R.L.A.; Jacobina, C.B.; Lima, A.M.N.; da Silva, E.R.C. A strategy for improving reliability of motor drive systems using a four-leg three-phase converter. In Proceedings of the APEC 2001, Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition (Cat. No. 01CH37181), Anaheim, CA, USA, 4–8 March 2001. [Google Scholar] [CrossRef]
- Kontarček, A.; Bajec, P.; Nemec, M.; Ambrožič, V. Single open-phase fault detection in permanent magnet synchronous machine through current prediction. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013. [Google Scholar] [CrossRef]
- Saleh, A.; Sayed, N.; Abdel, G.A.; Eskander, M.N. Fault-Tolerant Control of Permanent Magnet Synchronous Motor Drive under Open-Phase Fault. Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 455–463. [Google Scholar] [CrossRef]
- Park, B.-G.; Jang, J.-S.; Kim, T.-S.; Hyun, D.-S. EKF-based fault diagnosis for open-phase faults of PMSM drives. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009. [Google Scholar] [CrossRef]
- Gajanayake, C.J.; Bhangu, B.; Nadarajan, S.; Jayasinghe, G. Fault tolerant control method to improve the torque and speed response in PMSM drive with winding faults. In Proceedings of the 2011 IEEE Ninth International Conference on Power Electronics and Drive Systems, Singapore, 5–8 December 2011. [Google Scholar] [CrossRef]
- Jun, H.; Jianzhong, Z.; Ming, C.; Shichuan, D. Detection and Discrimination of Open-Phase Fault in Permanent Magnet Synchronous Motor Drive System. IEEE Trans. Power Electron. 2016, 31, 4697–4709. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, Z.; Jiang, W. Fault-tolerant control of open-circuit fault for permanent magnet starter/generator. In Proceedings of the 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018. [Google Scholar] [CrossRef]
- Peuget, R.; Courtine, S.; Rognon, J.-P. Fault detection and isolation on a PWM inverter by knowledge-based model. IEEE Trans. Ind. Appl. 2016, 34, 1318–1326. [Google Scholar] [CrossRef]
- Estima, J.O.; Cardoso, A.J.M. A New Approach for Real-Time Multiple Open-Circuit Fault Diagnosis in Voltage-Source Inverters. IEEE Trans. Ind. Appl. 2011, 47, 2487–2494. [Google Scholar] [CrossRef]
- Estima, J.O.; Freire, N.M.A.; Cardoso, A.J.M. Recent advances in fault diagnosis by Park’s vector approach. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013. [Google Scholar] [CrossRef]
- Bolognani, S.; Zordan, M.; Zigliotto, M. Experimental fault-tolerant control of a PMSM drive. IEEE Trans. Ind. Electron. 2000, 47, 1134–1141. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Zigliotto, M.; Zordan, M. Innovative remedial strategies for inverter faults in IPM synchronous motor drives. IEEE Trans. Energy Convers. 2003, 18, 306–314. [Google Scholar] [CrossRef]
- Meinguet, F.; Gyselinck, J. Control strategies and reconfiguration of four-leg inverter PMSM drives in case of single-phase open-circuit faults. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009. [Google Scholar] [CrossRef]
- Xinxiu, Z.; Jun, S.; Haitao, L.; Xinda, S. High Performance Three-Phase PMSM Open-Phase Fault-Tolerant Method Based on Reference Frame Transformation. IEEE Trans. Ind. Electron. 2019, 66, 7571–7580. [Google Scholar] [CrossRef]
- Xinxiu, Z.; Jun, S.; Haitao, L.; Ming, L.; Fanquan, Z. PMSM Open-Phase Fault-Tolerant Control Strategy Based on Four-Leg Inverter. IEEE Trans. Power Electron. 2020, 35, 2799–2808. [Google Scholar] [CrossRef]
- APC Propellers TECHNICAL INFO. Available online: https://www.apcprop.com/technical-information/performance-data/ (accessed on 2 May 2021).
- Seung-ki, S. Reference Frame Transformation and Transient State Analysis of Three-Phase AC Machines. In Control of Electric Machine Drive Systems, 1st ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Caruso, M.; Di Tommaso, A.O.; Miceli, R.; Nevolos, C.; Spataro, C.; Trapanese, M. Maximum Torque per Ampere Control Strategy for Low-Saliency Ratio IPMSMs. Int. J. Renew. Energy Res. IJRER 2019, 9, 374–383. Available online: https://www.ijrer.org/ijrer/index.php/ijrer/article/view/9057 (accessed on 7 September 2021).




















| Fault Mode | Failure Rate [×10−6 h−1] | Contribution (%) | Coverage |
|---|---|---|---|
| Open-circuit phase (single) | 18 | ||
| Open-circuit (3-phase) | 54 | (22.5%) | √ |
| Short-circuit phase (single) | 8 | ||
| Short-circuit (3-phase) | 24 | (10%) | √ |
| MOSFET fault (single) | 14 | ||
| MOSFET fault (full bridge) | 85 | (35%) | √ |
| Power supply | 54 | (22.5%) | × |
| Control and processing | 23 | (9.5%) | × |
| Ball-bearing seizure | 0.1 | ||
| Mechanical domain | 1 | (0.5%) | × |
| Total | 240 |
| Failed Phase (w) | x | y | m |
|---|---|---|---|
| a | b | c | 0 |
| b | c | a | 2 |
| c | a | b | 1 |
| Method | Latency [ms] | Monitor Frequency [kHz] | Electrical Frequency [Hz] | Monitor Samples Per Electrical Period |
|---|---|---|---|---|
| ZSVC [19] | 1666 | |||
| CSD [21] | 445 | |||
| AAV [22] | 400 | |||
| CSnD | 42 |
| Control Strategy | Control Laws Robustness | Torque Ripple | Average Torque Degradation |
|---|---|---|---|
| SCHC [25,26] | Average | Average | Average |
| RCHC [26] | Average | High | High |
| RCFFC [24,25,26] | Low | Average | Negligible |
| RCFTC | High | Low | Negligible |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suti, A.; Di Rito, G.; Galatolo, R. Fault-Tolerant Control of a Three-Phase Permanent Magnet Synchronous Motor for Lightweight UAV Propellers via Central Point Drive. Actuators 2021, 10, 253. https://0-doi-org.brum.beds.ac.uk/10.3390/act10100253
Suti A, Di Rito G, Galatolo R. Fault-Tolerant Control of a Three-Phase Permanent Magnet Synchronous Motor for Lightweight UAV Propellers via Central Point Drive. Actuators. 2021; 10(10):253. https://0-doi-org.brum.beds.ac.uk/10.3390/act10100253
Chicago/Turabian StyleSuti, Aleksander, Gianpietro Di Rito, and Roberto Galatolo. 2021. "Fault-Tolerant Control of a Three-Phase Permanent Magnet Synchronous Motor for Lightweight UAV Propellers via Central Point Drive" Actuators 10, no. 10: 253. https://0-doi-org.brum.beds.ac.uk/10.3390/act10100253