Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators
by
James Walker
1, 
Thomas Zidek
1,
Cory Harbel
1, 
Sanghyun Yoon
1,
F. Sterling Strickland
2,
Srinivas Kumar
1 and
Minchul Shin
1,* 1
Department of Mechanical Engineering, Georgia Southern University, Statesboro, GA 30460, USA
2
Department of Manufacturing Engineering at Georgia Southern University, Statesboro, GA 30460, USA
*
Author to whom correspondence should be addressed.
Actuators 2020, 9(1), 3; https://0-doi-org.brum.beds.ac.uk/10.3390/act9010003
Submission received: 29 September 2019
/
Revised: 9 December 2019
/
Accepted: 11 December 2019
/
Published: 10 January 2020
(This article belongs to the Special Issue Pneumatic Soft Actuators)
Abstract
:This paper focuses on the recent development of soft pneumatic actuators for soft robotics over the past few years, concentrating on the following four categories: control systems, material and construction, modeling, and sensors. This review work seeks to provide an accelerated entrance to new researchers in the field to encourage research and innovation. Advances in methods to accurately model soft robotic actuators have been researched, optimizing and making numerous soft robotic designs applicable to medical, manufacturing, and electronics applications. Multi-material 3D printed and fiber optic soft pneumatic actuators have been developed, which will allow for more accurate positioning and tactile feedback for soft robotic systems. Also, a variety of research teams have made improvements to soft robot control systems to utilize soft pneumatic actuators to allow for operations to move more effectively. This review work provides an accessible repository of recent information and comparisons between similar works. Future issues facing soft robotic actuators include portable and flexible power supplies, circuit boards, and drive components.
1. Introduction
Robots are becoming ubiquitous in modern society. Robots have changed the way humanity manufactures our goods, performs surgery, and transport ourselves along with our possessions. However, the boundary between robots and humans remains hazardous [1] as the modern day hard robot requires a lot of precise control and while they excel at repetitive massive production functions, they struggle to interact with uncertain environments [2]. This is where the new field of soft robotics excels. A soft robot is primarily composed of stretchable, flexible materials, such as silicon rubber. While these softer materials have a lower rigidity when compared to metals used in hard robots, these softer robots have provided more flexibility and adaptability to the workspace creating safer environments, particularly in a human-robot integrated workspace. There have been many exciting developments and research around soft robotics recently, which will be chronicled in this review study.
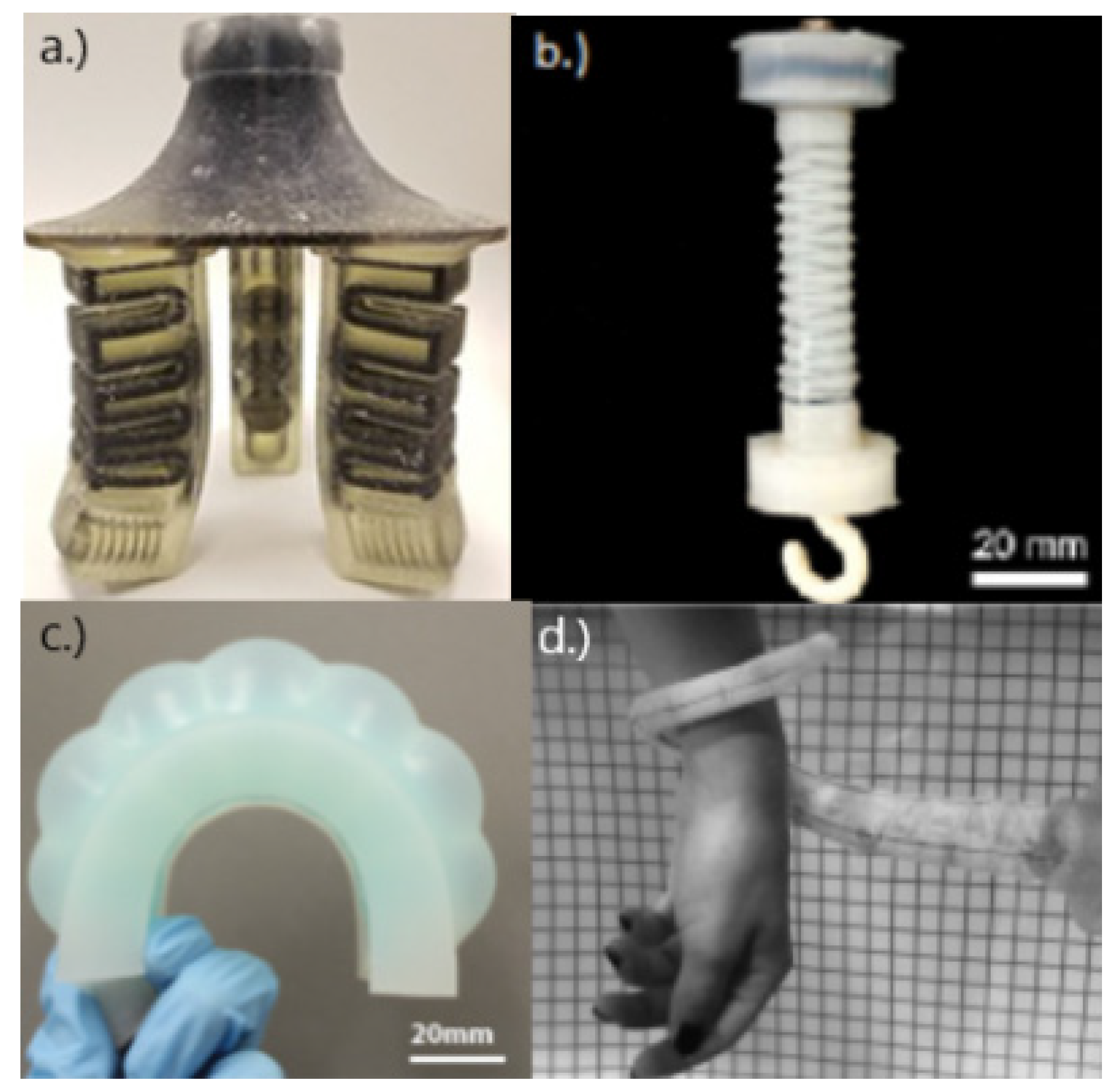
The most important physical aspect of a robot is movement [3]. For soft robots, movement is conducted by using variable length tendons [3], by pneumatic actuations, or even more recently by twist-and-coil actuators [4], as seen in Figure 1. Many of the modern actuation methods have been designed to replicate biological movements, such as fish fins or octopus tentacles [5,6,7,8,9,10].
Many soft robots use pneumatics or hydraulics to actuate their bodies, but another way actuation has been implemented into soft robots is through the development of electroactive polymers which electrically activate soft actuators in order to cause movement [15,16,17,18]. The flexible nature of soft robots necessitates the development of stretchable electronics such as sensors and power sources. The compliance and morphology of soft robots prevent the use of many conventional sensors seen in hard robots, so there has been active research into stretchable electronic sensors and curvature sensors. Elastomer sensors allow for minimal impact to the actuation of the robot [19]. Along with these sensors, soft robots also have the capability of hosting chemical and biological sensors to sense environmental signals which could eventually allow them to be human-centered tools for the ideal workspace between humans and robots [5]. Power sources have also been a big point of emphasis with general compressors using a lot of electricity, alternative methods such as chemical reaction-based sources and combustible fuels have been looked at for solutions [6,20,21]. In turn, many soft robotics designs have been made using ‘2.5D’ designs, limited primarily by 3D printed capabilities and model complexity, or use abstract approaches with the current software available [22,23,24]. Fabrication has also been an area of interest; however, thanks to rapid growth in digital design and fabrication tools, there are now many ways to develop soft robots with different material selections and as well as embedded needed electronics into channels of the material for system use [11,25,26,27,28].
The movements of soft bodies can be described by an infinite number of degrees of freedom. Its intrinsic deformation such as bend, twist, stretch, compress, buckle, wrinkle, etc. makes the control of soft robots very challenging [7]. The muscle analogy of soft organisms is introduced to understand the working principle of soft bodies. An understanding of the principle of octopus has led to inspiration for modeling and control [7].
Due to its absent of rigid structure, the kinematics and dynamics of soft-robotic systems are different from that of conventional systems. Therefore, researchers have developed a new static, dynamic, and kinematic models for soft-robotic system. Designers model the kinematics of soft robots using piecewise constant curvature (PCC) [8]. In approaches of developing methods to connect the actuation space to the configuration space, the morphology of the robot body and the characteristics of the actuation system is studied and combined. Some forward kinematics basis approaches are a use of Bernoulli-Euler beam mechanics to predict deformation [8], a relationship between the joint variables and the curvature arc parameters of high and medium pressure robot. Existing solutions of the inverse-kinematics problem are neglecting the consideration of the pose of the end effector [9,29]. This limited computation creates difficulty in avoidance of autonomous obstacles and movement under restrained environment. Without consideration of the entire robot body including the end effector, task-space planning algorithms which allows a detailed tasks, such as maneuvers in confined circumstances and grasping or placing objects, are challenging [30].
When the robot is used in the environment, the use of compliance is key to the developed algorithms; using compliance, the robot can interact with objects with unknown geometry [4,5,31]. Soft robots are controlled in low-level using pressure transducers which provides differences in actuator compliance, or volume control using strain sensors. Volume control is very effective in configuration control and assists setting a maximum safe displacement [1,4,7,12,32]. Valve sequencing control is controlling the body-segment actuator by pressurizing the actuator for a period by turning the valve on and off [10]. Recent work has tried to develop more compact control elements for pneumatic soft robots that does not require electrical control signals. Without electrical control, the addressable control of actuators from a single pressure source is possible [33].
Applications for soft robotics include locomotion, manipulation, medical devices, and wearable applications [34]. Many of the locomotion techniques have been modeled after fluid moving creatures such as caterpillars [35], worms, octopus, and fish. Many of these, like the octopus, provide a model for morphological computations [36]. Most of locomotion has been enhanced by using electrical tethers, friction manipulation and motor-tendon actuation [37]. Another boon of soft robotics is the natural advantage they have with object deformation. Due to the flexibility of the soft robots, they can manipulate their bodies, especially a gripper or finger [15,38], to grab objects of varying size and shape. Since the material of soft robotics is modeled after biological systems, soft robotics make for a very good option in the field of medical and wearable devices due to their flexibility and absorption factors, such as seen in recent reverse pneumatic artificial muscle technology [12,13,39] and manipulators for minimally invasive surgery [40].
The recent advances of note in the field of soft robotics can be broken into four categories, control systems, materials and construction, modeling, and sensors, which will be explored in the following pages. These four subjects have been identified as pertaining most directly with the widespread adaptation of soft robotics both industrially and commercially, as they begin to solve the problems soft robotics have with repeatability, manufacturability, and control stability. Therefore, the recent research selected for this article have been chosen due to their contribution to solutions to the problems preventing the widespread application of soft robotics. Soft robotics could be deployed medically to improve patient care, domestically to provide safe and useful household robots, and industrially to provide flexible robots compatible with human coworkers [1,2,34,40]. Mobile soft robots could also provide search and rescue operations with scouting and extraction robots capable of moving through uneven and uncertain terrain without complex control algorithms because of their inherent compliance [4,5,31,41].
The field of soft robotics is so complex that a review of the field is necessary to provide newcomers an expedient entry to the research. Even for those familiar with the field, the amount of new research being generated makes it difficult to stay abreast of current events. This paper aims to provide a good entry point to the complex subject of soft robotics, specifically for recent developments in the four aforementioned topics, such that others may be able to use this review as a springboard for their independent research efforts. This review may also serve as a tool for experienced researchers to quickly identify interesting research related to their own projects. This paper also identifies some areas of soft robotics that have not received as much research, and therefore present opportunities for new meaningful research.
Sources for this paper were primarily found using the Georgia Southern University Library resources. Several rounds of search were conducted, first for non-specific soft robotics papers to establish background knowledge and an understanding of the history of the field. Key words included “soft robotics,” “design,” “fabrication,” “soft material,” “soft sensors,” “flexible robots,” and others. It was important that these papers be published prior to 2016 to properly identify the foundational technologies and traditional systems of soft robotics. After the establishment of foundational research, individual searches were conducted to identify recent and useful papers and articles regarding the four topics aforementioned. Key words included the previous keywords used for the general search as well as some keywords more specific to each topic. In order to ensure that these papers represent recent developments in the field, these papers were restricted to papers published after 2015. Studies that were not sourced from a reputable publisher, had significant conflicts of interest, or had too few citations were not considered for inclusion in this review article. The bibliography is primarily restricted to peer reviewed scholarly articles and papers.
2. Control Systems
Control Systems over the years have evolved, and now the standard for soft robotics is using pneumatic systems to move the structure of the robot, although some hydraulic systems [42,43,44] are used. In order to control pneumatic and hydraulic systems, either an open or closed loop must be implemented [16,45,46,47,48,49]. Which option, open or closed loop, is better depends on the application to be accomplished with the soft robotics [12,37,46,50,51,52,53,54].
There have been studies that show the pros and cons to both open and closed loops [55,56,57], but the most controversial part was dependent on the presence of a feedback system paired with the loops. In the original development of soft robots, the designs were intended to optimize performance and increase effectiveness while enabling safe interactions with the environment; however, the traditional feedback-only actions that have been developed for higher accuracy control of soft robotics do not satisfy all of these conditions. To answer this issue, an algorithm called Iterative Learning Control (ILC) was developed. When the ILC algorithm was used with a low stiffness robot, the robot was able to recognize an object in the environment and stop its own motion before moving the object [58]. There is also a control system known as a Proportional-Integral-Derivative (PID) controller, which is a control loop mechanism that utilizes feedback to keep a constant variable. Due to the fact that the PID controller only impacts one variable other control methods have been tested [59] A PID can be part of the control system, but there needs to be more hardware that effectively communicates to the servo motors or solenoids that activate the open or closed loops [60,61].
Usually an Arduino board is used to drive the control system due to its ability to come in different sizes along with the fact that it is easy to code as it accept many different languages [62]. It also allows the ability to control servo motors, biological muscles, and other actuators to move or have the ability to pick up objects, as seen in Figure 2 and Figure 3. The Arduino is not the only thing that can be used though, as long as the soft robotics has a microcontroller that is able to freely communicate through it to a PC using a system such as MATLAB, Simulink, etc. [63].
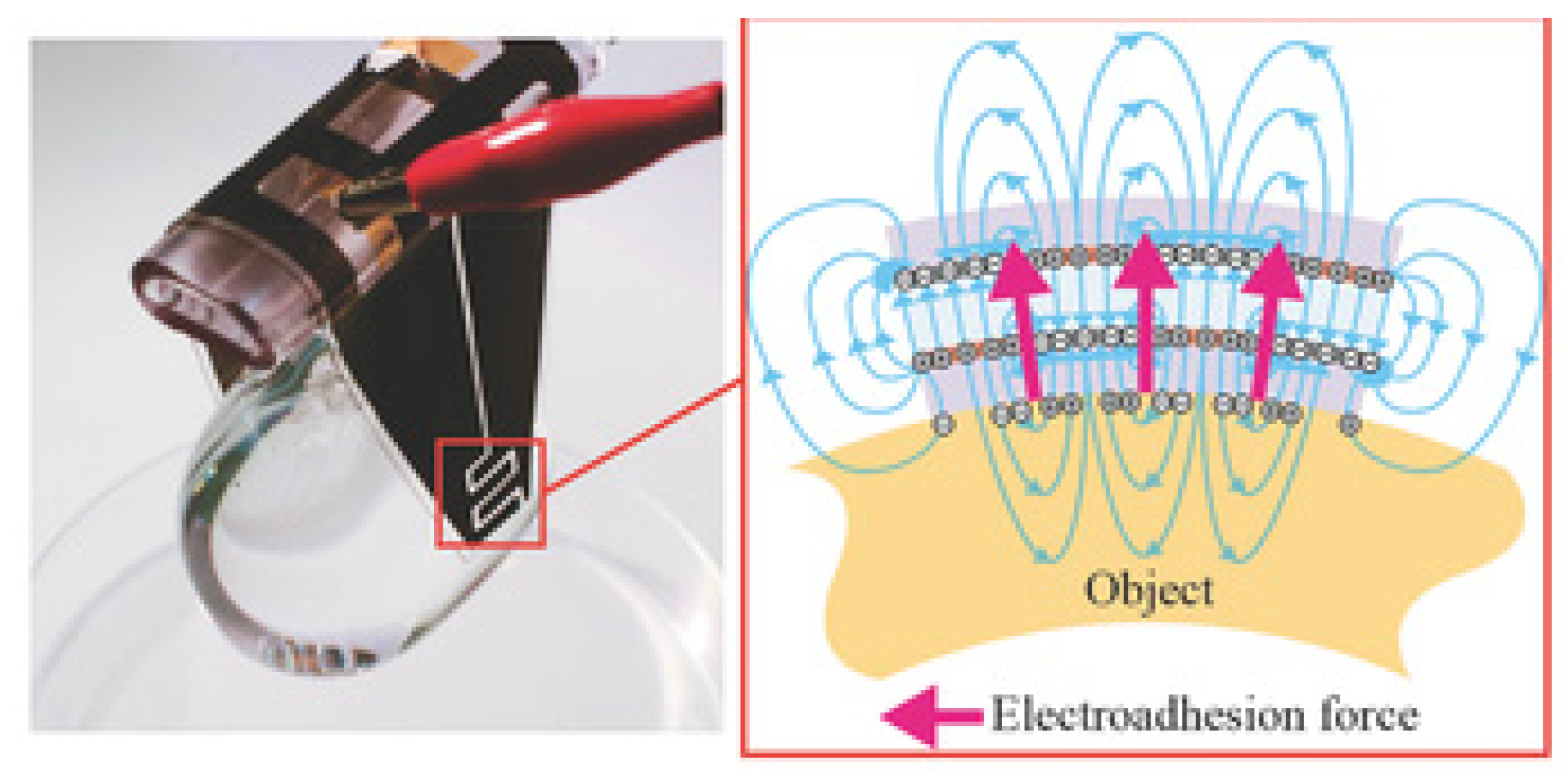
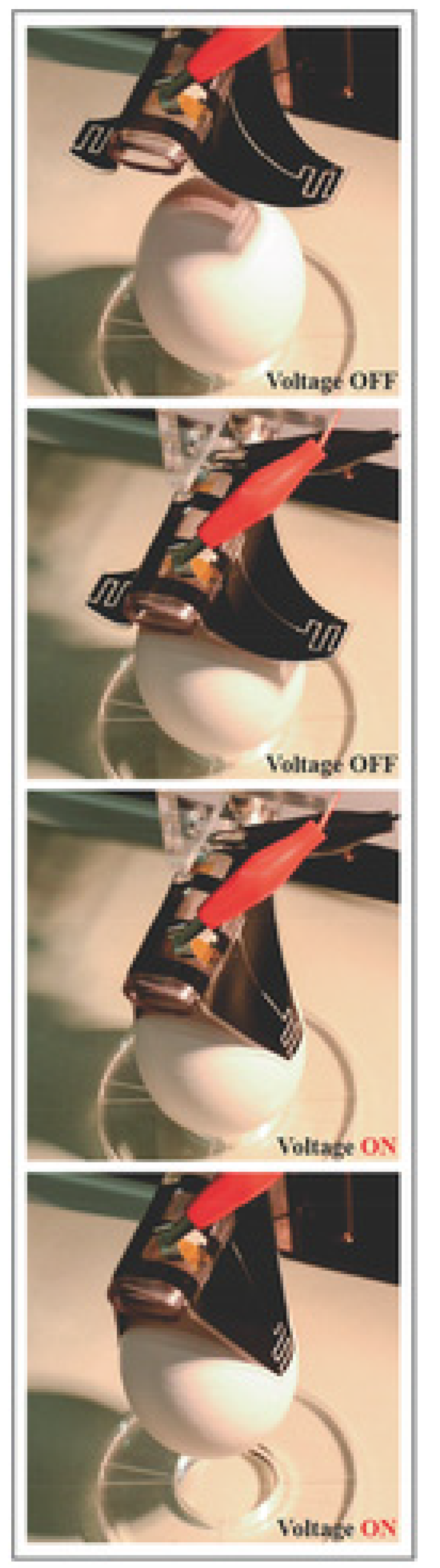
Using a microcontroller, for example an Arduino or a Raspberry Pi, there is an opportunity to control and utilize the magnetic field [15,16,18,65]. The magnetic fields allow for an electro-adhesive force on an object and to control it depending on how the positive and negative fields are positioned. The change in the magnetic field causes the compliant electrodes to deform, resulting in a deformation across the actuator. As seen in Figure 2, the electric field changes due to the location of the positive and negative fields are placed. If a negative is placed next to a negative it repels one another but if a positive is placed next to a negative they are attracted to one another. This causes the relationship to change more significantly when multiple positive or negative fields are utilized. Key points of control systems are summarized below in Figure 4, Figure 5 and Figure 6.
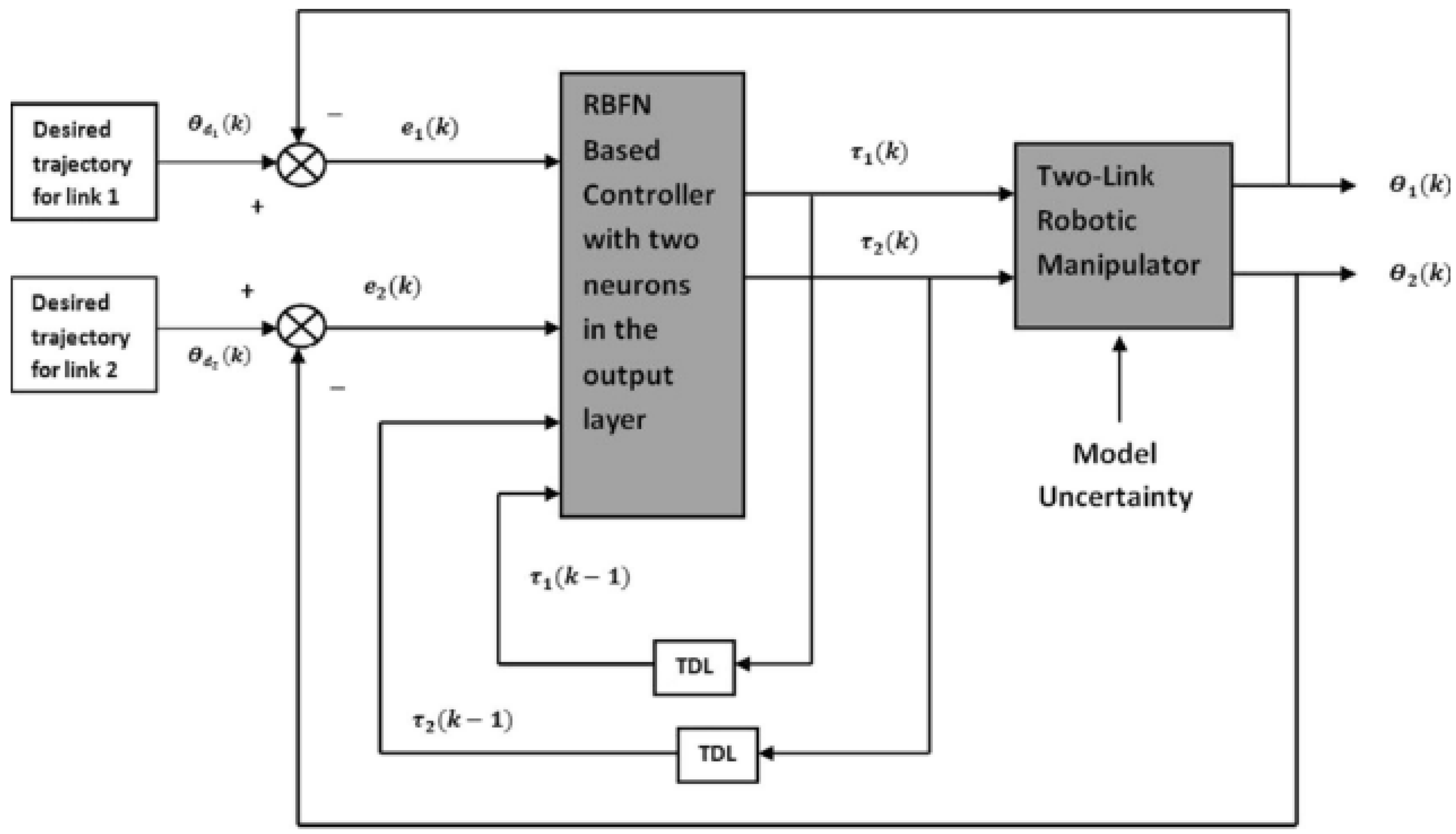
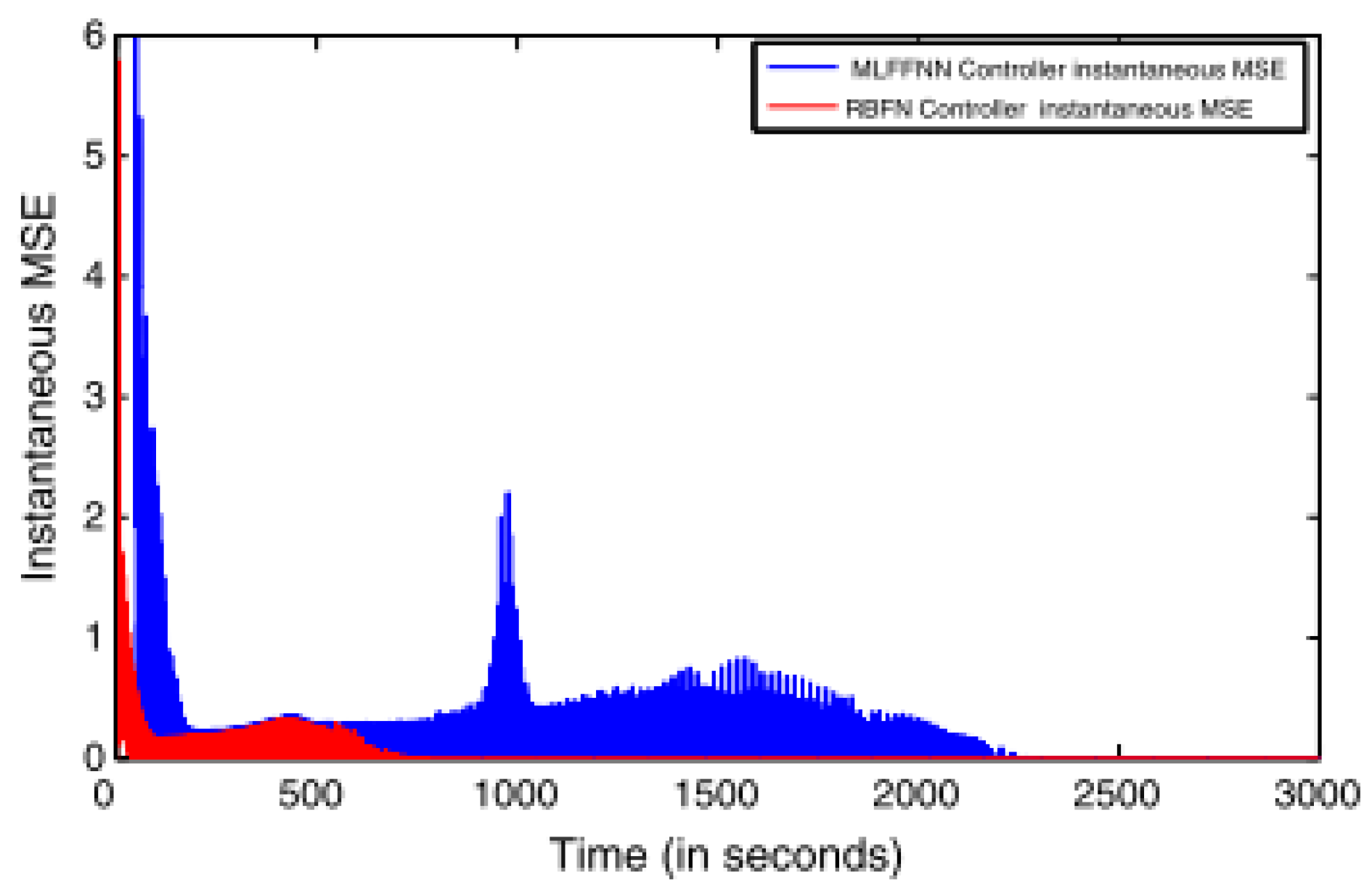
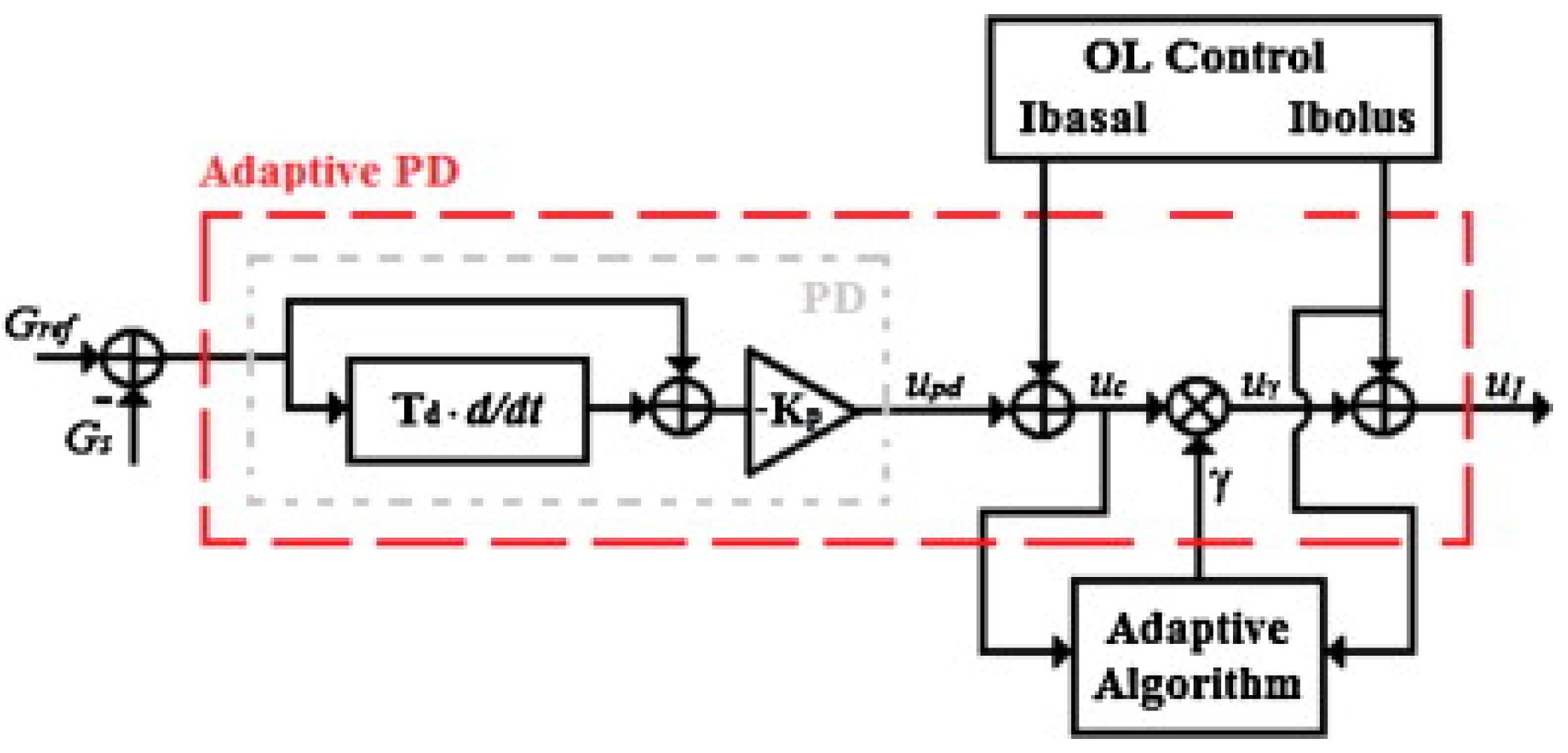
MLFFN and RBFN controllers both utilize predefined trajectory control to predict the position of a robotic manipulator and adjust input values accordingly to stabilize and bring a robotic manipulator to a desired position [59]. From Figure 5 above, The Instantaneous Mean Squared Error (MSE) was compared between a MLFFN Controller and RBFN Controller. The results showed the ability of the more complex RBFN controller’s ability to reduce error within the system much faster than the MLFFN controller [59]. However, the biggest disadvantage of the RBFN controller is its ability to control a simpler system when compared to a traditional PD system; RBFNs are more complicated than a simple system requires [59]. When comparing the two block diagrams in Figure 4 and Figure 6 between a PD controller and the RBFN block diagram, the PD controller can adequately control its system using a simpler model. A comparison between different types of control systems for soft robotics is in Table 1.
3. Materials and Construction
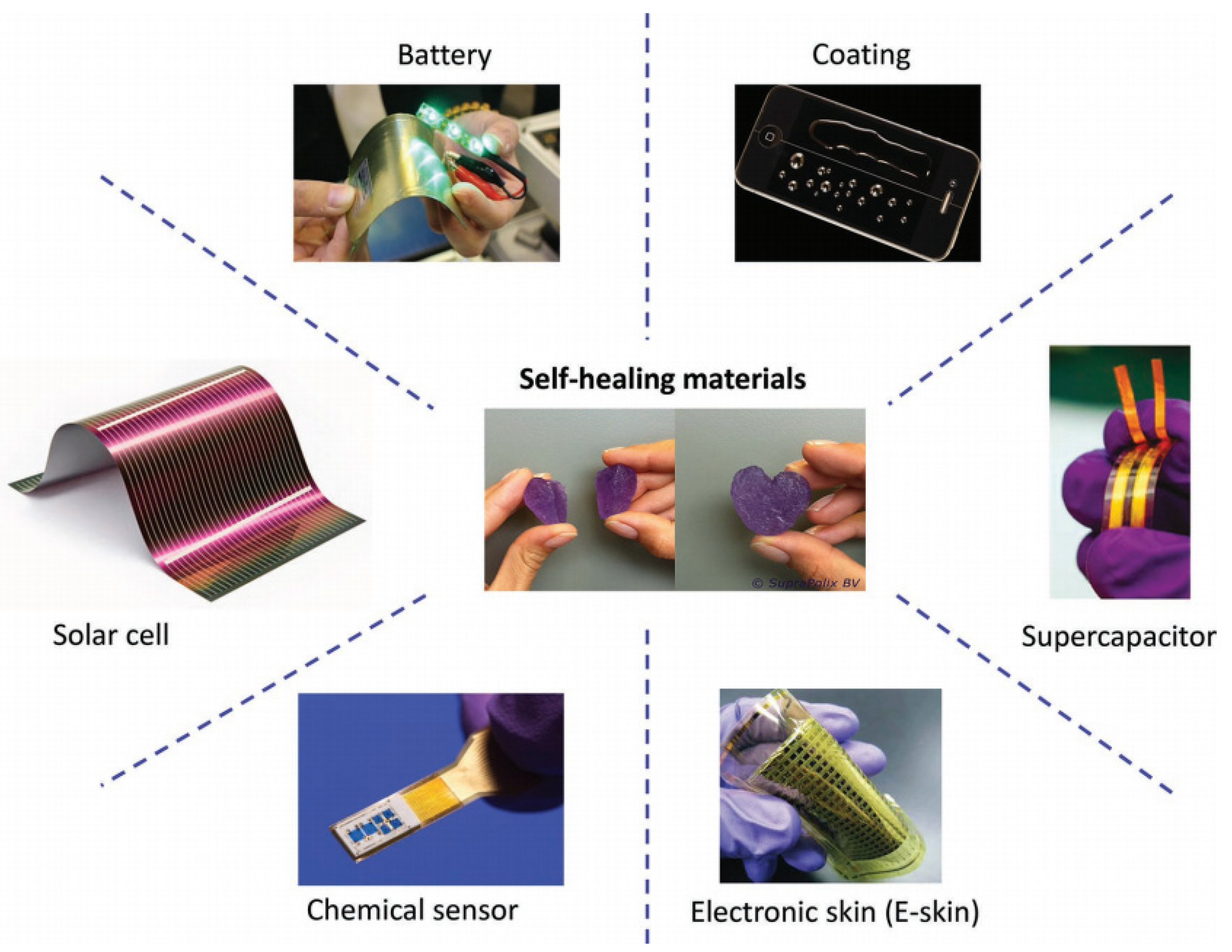
With the increasing advancement of technology, much progress has been made in the design and construction of soft robotics. Previous generations of soft robotics utilized silicone rubber as their primary mode of construction [75,76,77,78,79,80]. Silicone is a thoroughly explored material for soft robotics [81] and is generally cast into molds for fabrication [82,83,84]. However, in recent years, new fabrics, materials, and methods have been beneficial in the construction of soft robotics [22,30,85,86,87,88], including 3D printed actuators [23,24,25,26,89,90,91], and combining multiple small soft actuators can be stronger than a single large actuator [92]. Newer materials such as those used for single mass granular materials for grippers [93,94] and liquid-phase polydimethylsiloxane also called PDMS [95] for microscale usage have been in development. More environmentally conscience materials have also been developed, that are also more benign to work with than traditional silicone [96]. Another new type of material is a composite of reduced Graphene Oxide (rGO) which provides prospective outlooks for the construction of soft self-healing devices as shown in Figure 7 [97]. Safer polymers have also been developed that are environmentally friendly and biodegradable [98]. These materials branch away from the traditional silicone rubber material and offer new incentives of construction from the ability to self-repair, which would cut costs in case of damage to the structure, to more cost efficient materials so that they could be mass produced and readily available for more people to expand their field of research. Some materials can be variably stiffened, allowing more freedom and specificity of design [99].
One of the main focus areas in the material construction of soft robotics is regarding the movement of the mechanism. The material must emulate the body groups such as a muscle or tendon of the real-life counterpart [45,89,100,101,102] or the antagonistic relationship of both [103]. Many developments in the construction aspect has been on this criterion of the robotic mechanism [15,102]. This is especially in the medical field where improvements are always needed [104]. Fortunately, there have been advancements in the use of “hydrogels” to mimic the way that a real-life counterpart would move in nature [105,106]. These hydrogels have a better impact with more fluid and seamless movement as opposed to the traditional use of silicone rubber that can sometimes offer a more robotic, and unnatural sense of motion for the mechanism. The benefits of the hydrogel are that since it is a semi-solid material it can have more degrees of freedom of rotation as opposed to a rigid dynamic motion for the soft robotic mechanism. Other advanced materials being used in the field of soft robotics include electro-active polymers (EAP) which also provide excellent degrees of freedom and great compliance with its environments [31], and Diels-Alder Polymers which are able to “heal” microscopic and macroscopic damage [107]. Also, included in new material developments is an open-celled elastomeric foam which allows for great absorption by the material [108].
The main impact of what the improved technology with a more modern material design to soft robotics is in the benefit of undersea research explorations [109]. The current use of technology utilized by soft robotics is detrimental to the study and research of Deep Coral Reefs [109]. It cites the main reason being that the current material used for the soft robotics is often stiff and not as responsive under sea with high pressures as opposed to on land under normal atmospheric pressures commonplace to everyone. Resulting in the soft robotic destroying the coral reef sample, as it tries to interact with it. The solution proposed by the research staff discuss the use of sheet material such as “jet-cut aluminum” and “stacked layers of acrylic” these combinations of alloys results in the overall utility of the deep-sea robot to be able to gather and analyze better data without harming the coral habitat.
While there are many other materials on the market that can achieve the desired effect for the soft robot to achieve operation [94] in its intended field. Most materials offer a wide range of response times to control the robotic specimen, the tensile strength of the material, and the overall durability while on the field of use. Many factors often play a crucial role in the overall success and development of the soft robotic structure [18]. Outlined in Table 2 are the primary factors of the materials used in market soft robotic machines, how their composition is determined, and how the material is compared with other types.
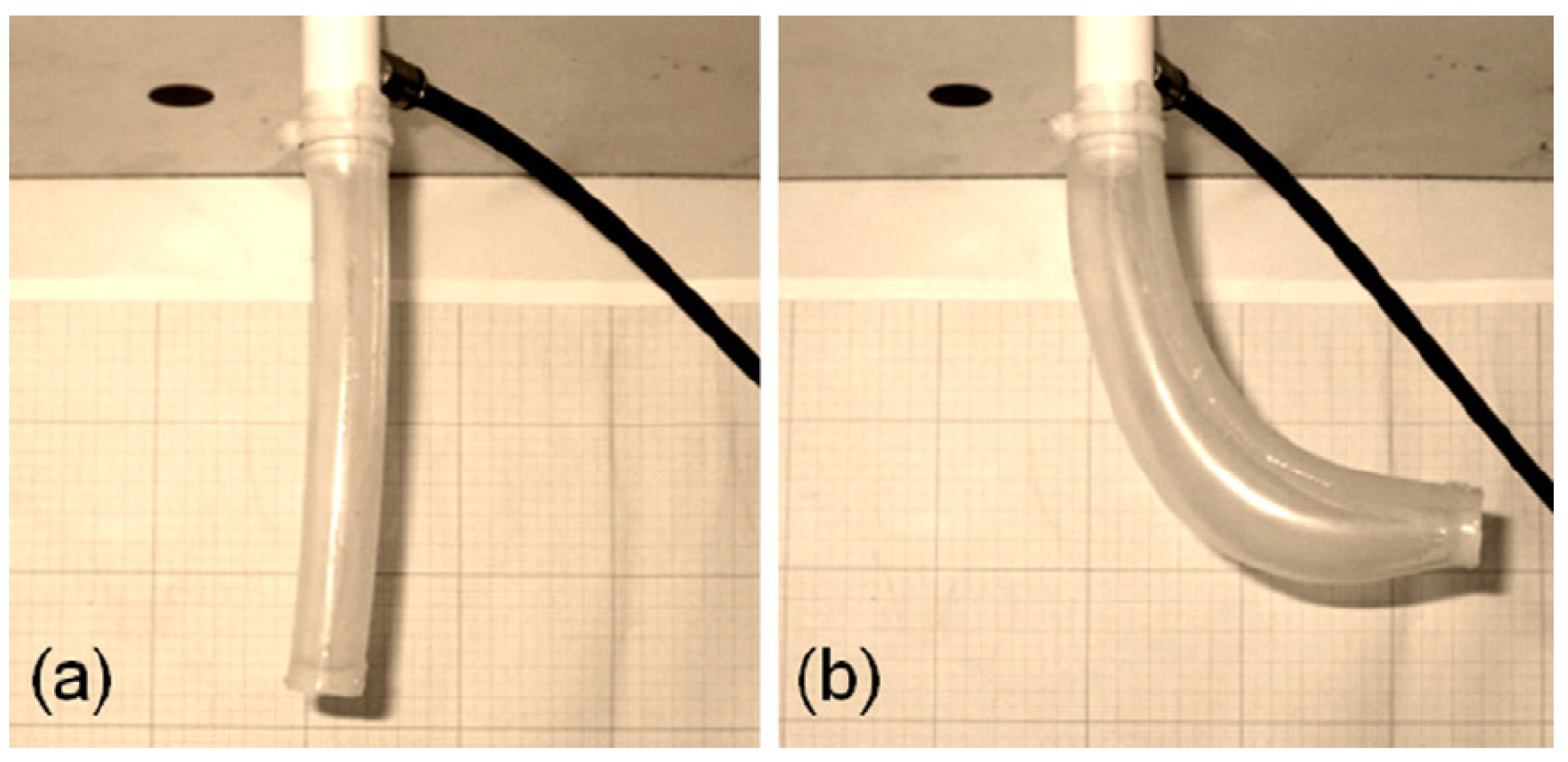
The primary material in the construction of soft robotics has historically been silicone [110]. Figure 8 is example of bending actuator that is made of silicone rubber. Many silicone-based materials have seen wide usage in industry [94] since the material is easily produced and very versatile. Although silicone is a versatile material, the longevity of the material is compromised when using silicone in a soft robot [105].
Another great soft robotic material is the 3D printed material as shown in Figure 9. 3D printed soft robots can be easily mass produced, and due to the cost-effective material more soft robots can be produced [22]. The drawback for a 3D printed material for a soft robotic part is that the tensile strength of the part is very low, and thus can break very easily as opposed to other materials for soft robotic parts [22]. However, with the advent of better 3D printing machines, new advances have been made to increase the tensile strength of 3D printed materials for soft robotics [13].
4. Modeling
One of the biggest issues in the field of soft robotics is finding methods and models which are both accurate to experimental values and computationally viable [48,112,113,114,115,116,117]. Due to the deformable nature of under-actuated soft robotics, they are dynamically formulated using a system of infinite dimensions [23,58,93,118,119,120]. These designs are currently unable to be reduced to an exact model which often leads to rigid-body assumptions to create manageable dynamic equations [121]. Figure 10 below shows a McKibben muscle controlling a rigid body mechanism, allowing for the deformation of the actuator to be easily measured with rigid body dynamic equations [122].
Recently, sets of ordinary differential equations have been formulated to create a more mathematically accurate model to describe the dynamic motion of soft robotics [119]. Currently, Finite Element Analysis (FEA) meshes/models have been the most widely used method of simulating soft robotic dynamics, an example seen below in Figure 11.
However, using FEM/FEA there is an exponentially increasing computational burden for increasingly accurate models [90,124]. Which is why other areas of modeling have been explored, including the use of Artificial Neural Networks (ANNs) and Piecewise Constant Curvature (PCC) [32]. Another aspect to consider when developing these models is the non-conservative forces at play including frictional forces between materials as well as the resistive forces of the soft materials, usually silicone or rubber [125]. To ignore these forces in the computational model directly leads to systematic error between the model and the experimental results. To mitigate these differences, more accurate models which can account for the numerous forces that are often overlooked for simplicity purposes are being developed [125]. The impedance of the robot is considered for simplicity linear. However, most of the results proposed are easily generalizable to the nonlinear case [119].
In Table 3, comparisons can be seen between different gripping technologies. This table seeks to show the range and versatility different technologies possess. In Figure 12, for example, ECF’s have very small applied forces from them for very precise movements at the cost of high power consumption due to the high pressurization requirement that inherently comes with ECF based actuators [77,123,126,127]. Knowing which situations certain soft robotic technologies are appropriate is beneficial to the ability to accurately model and create designs. As more unique and effective methods are developed at producing soft robotic actuators, the ability to accurately predict the forces they produce in more elaborate designs becomes easier to achieve [3,27].
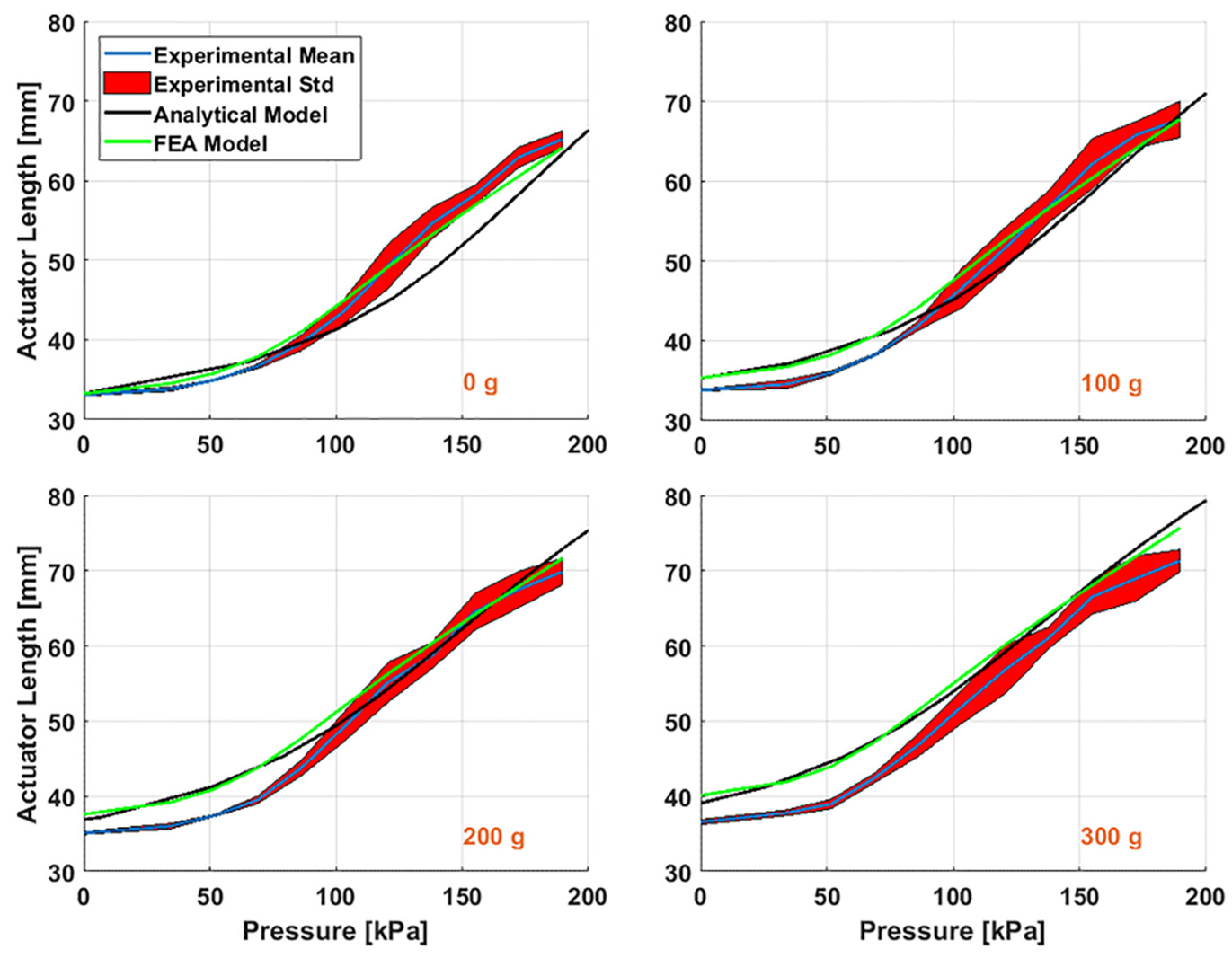
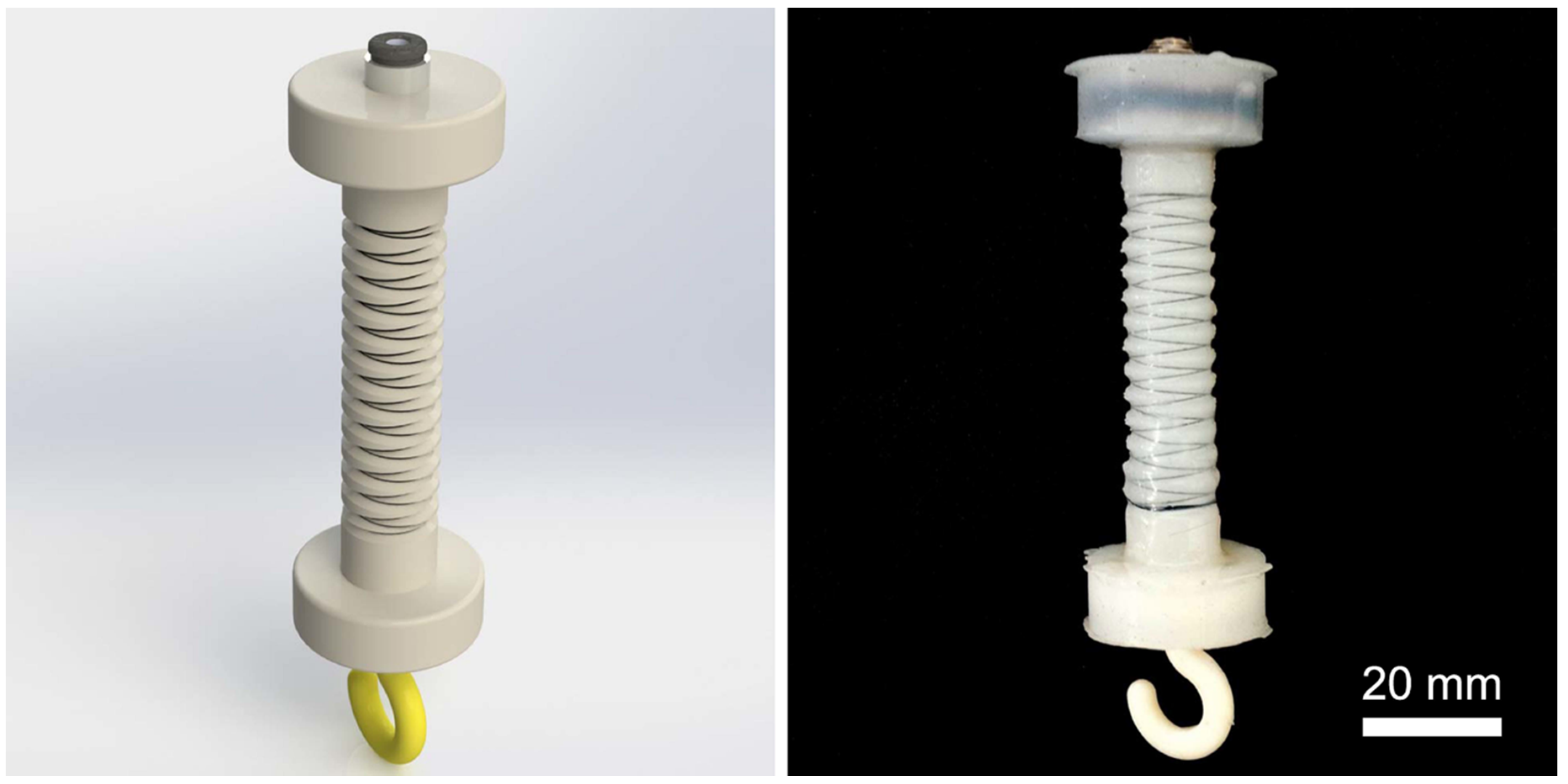
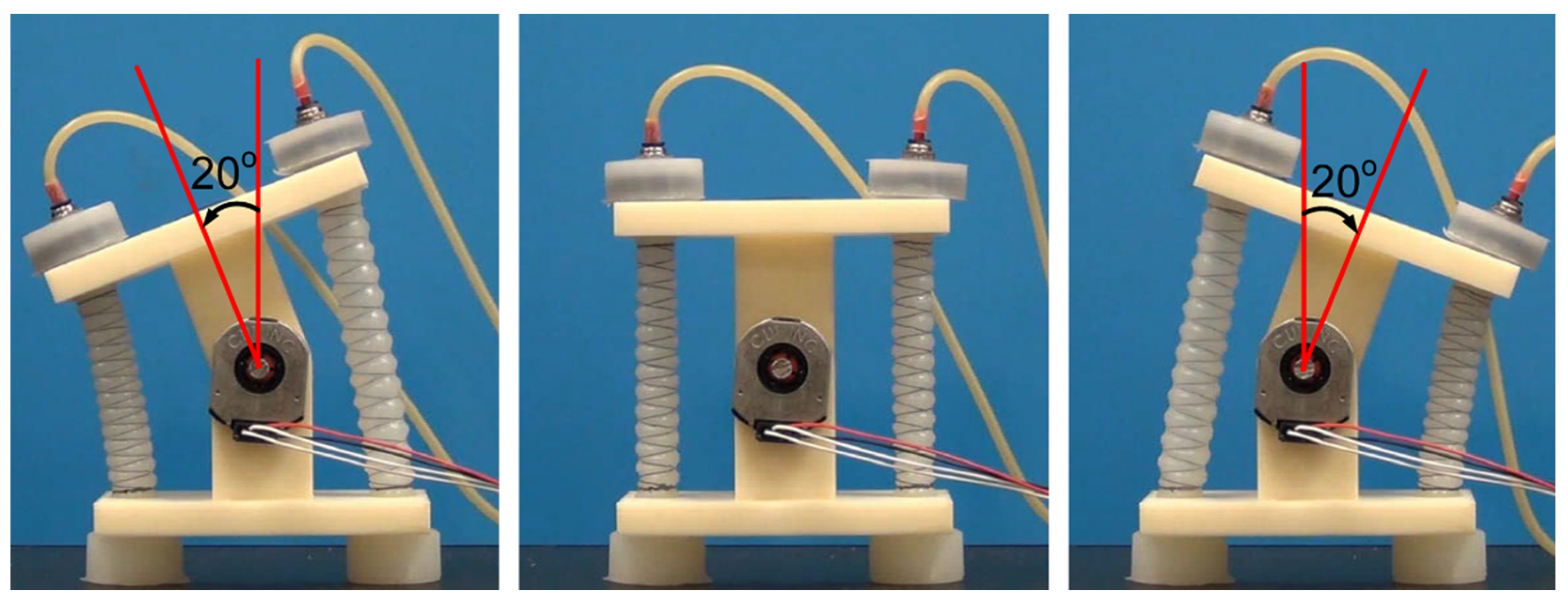
Figure 13, Figure 14 and Figure 15 show the accuracy of computationally efficient models to experimental results of soft robotic actuators. In this case to make the FEA model computationally viable, the silicone rubber was assumed to be incompressible and the helical thread surrounding the silicone to be a radial constraint rather than a helical constraint [12]. Even with those approximations made to the FEA model, Figure 13 shows the ability of FEA modeling techniques to represent the reverse pneumatic artificial muscles (rPAM) effectively. This viability of FEA models to predict the nature of the design will allow for more complex, intricate and economically viable designs to be accurately modeled in the future [12].
5. Sensors
Over the past four years sensing technology for soft robotics, the lack of which has delayed industrial and commercial adaptation, has been heavily researched [129]. There have been multiple research efforts exploring different curvature, tactile, and optical sensors for use with soft robotics yielding reliable sensors capable of a high degree of accuracy with minimal hysteresis [55,118,130]. Many of the studies emphasized the development of inexpensive, easily manufacturable sensors that can be integrated into flexible applications without affecting the performance of the stretching and deforming structure of the soft robots [33,85,131,132,133]. The primary avenues of recent research have been investigating liquid metal embedded elastic sensors, embedded magnetic sensors, semi-conductive polymer sensors, optical fiber curvature sensors, and even piezoelectric sensors [134,135].
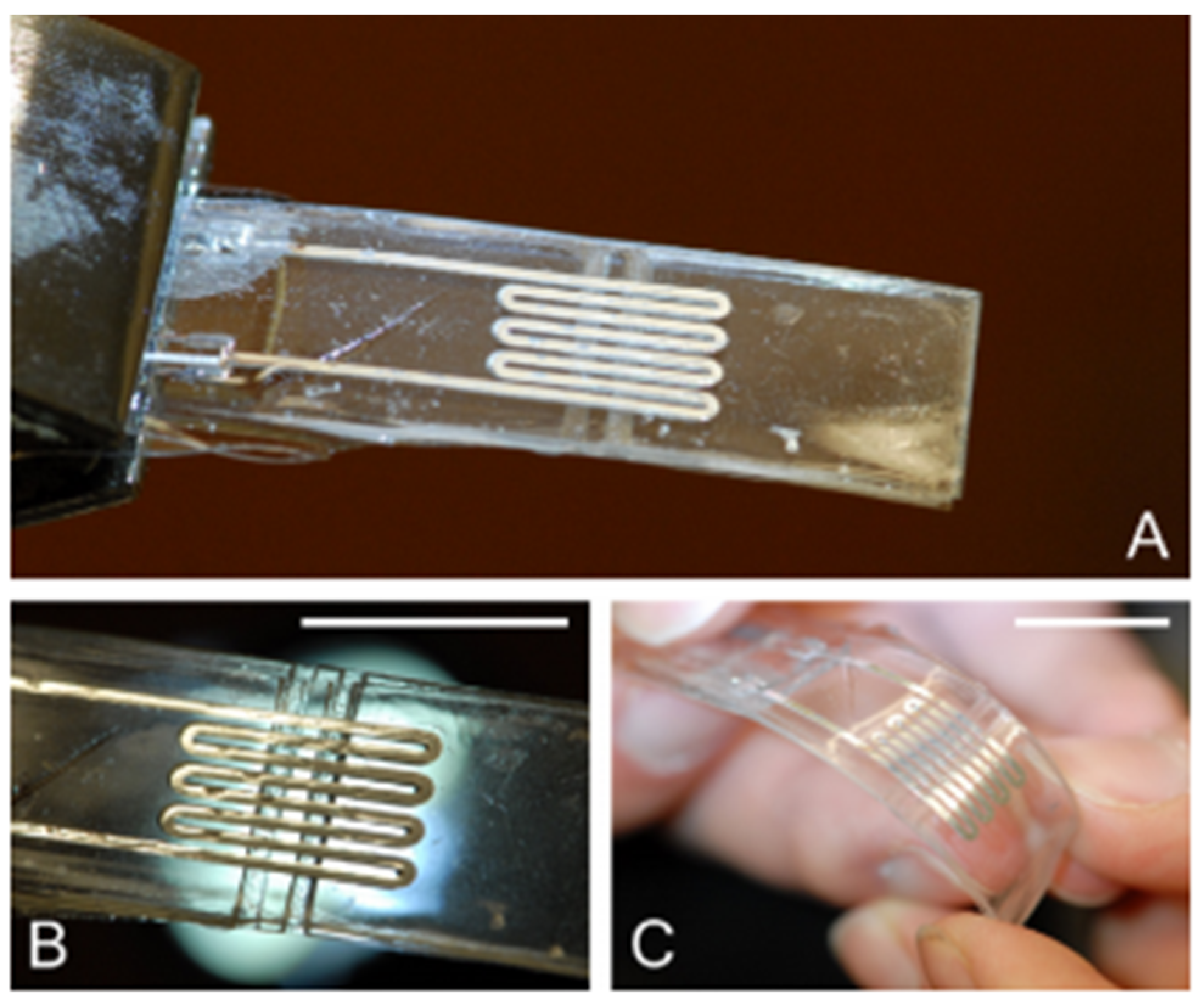
Channels filled with liquid metal encased in an elastomer exhibit changes in resistance as they are deformed or stretched [136]. This behavior is similar to traditional strain gauges, though liquid metal embedded elastomers (LMEE) exhibit superior flexibility and are designed to operate in the same Young’s Modulus range as soft robots. In Figure 16, a sensor made by Edward White et al. [136] is depicted. Note how the sensor can flex into a tight curve without causing damage to itself.
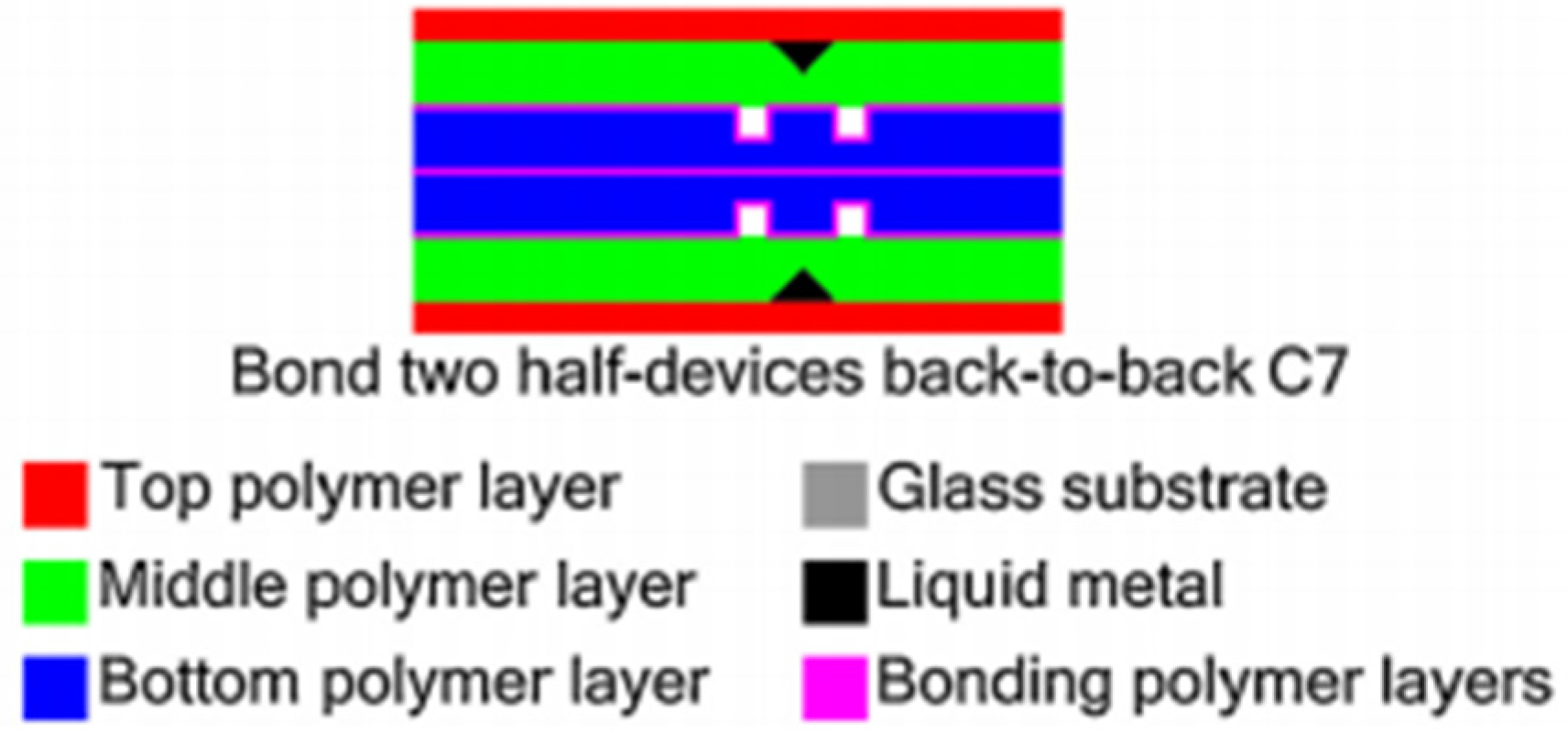
Traditionally the silicone used for LMEEs would be cast into a mold to form the channels; however, this fabrication method takes a long time to generate new sensor patterns and can result in castings of uneven thickness. Instead, White et al. [136] spin cast their silicone, and then used a laser engraver to burn in the channels for the liquid metal. This method allows for the rapid iteration of sensor design and precision manufacture of the sensor components. A layered design was used, as in Figure 17.
Embedded magnets coupled with Hall Effect sensors have proved to be an accurate method for providing tactile and curvature sensing. Small rare earth magnets and Hall Effect sensors are inexpensive and accessible, while also providing rapid feedback and precise measurement [137]. When integrated into a soft robotic hand, tactile 3 axis sensors provide accurate and detailed data regarding the contact forces, allowing the manipulation of delicate objects [138]. These types of sensors are generally manufactured using silicone rubber cast into 3D printed molds [137,138,139]. The magnets are suspended in the silicone, as in Figure 18.
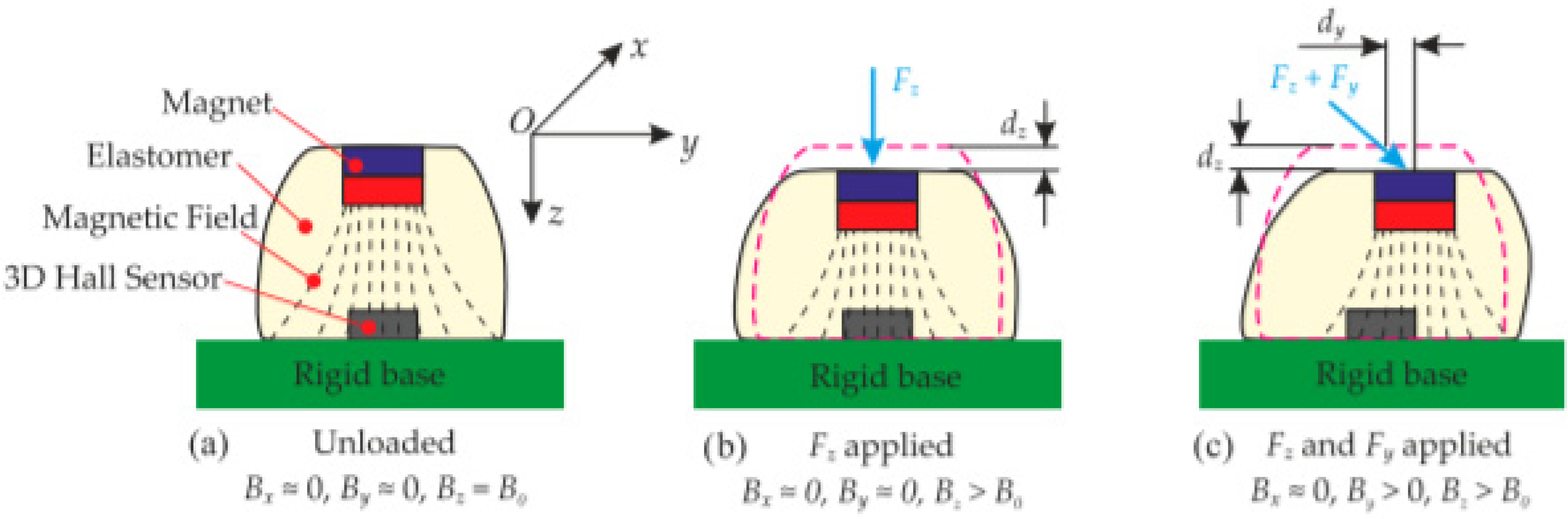
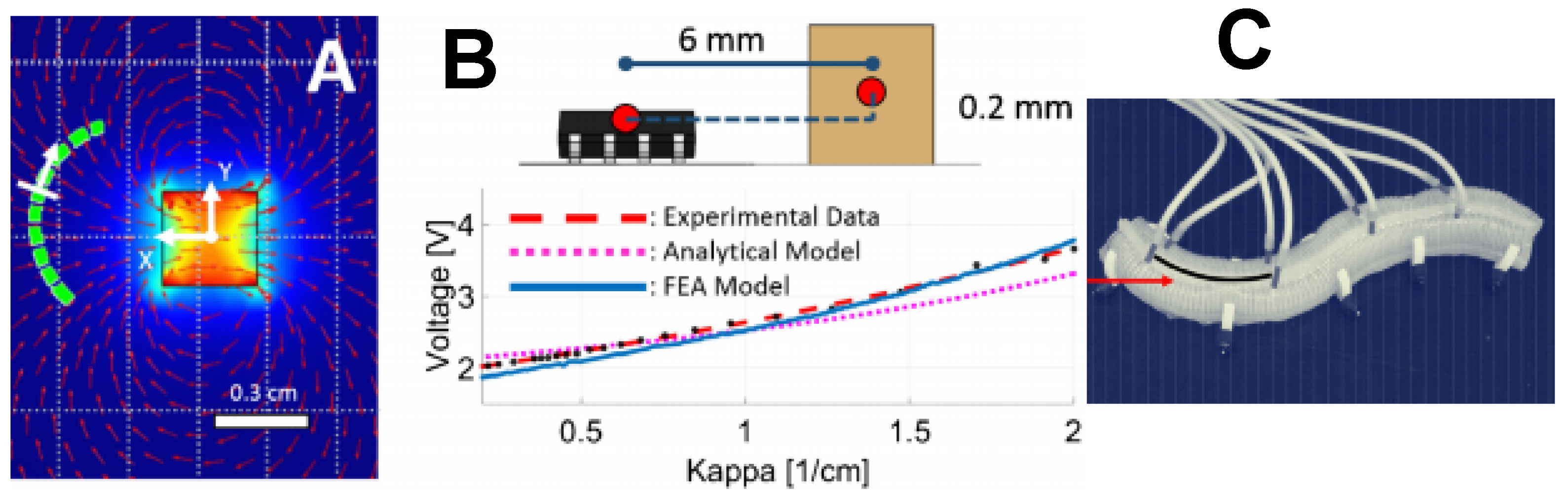
Embedded magnet sensors (EMS) measure the displacement of the magnetic field to detect movement and are therefore sensitive to external forces as well as internal forces. EMS have proved to be highly accurate with minimal intrusion on the flexibility of the soft robot itself, and also to be highly model-able, allowing for good predictions of functionality, as in Figure 19.
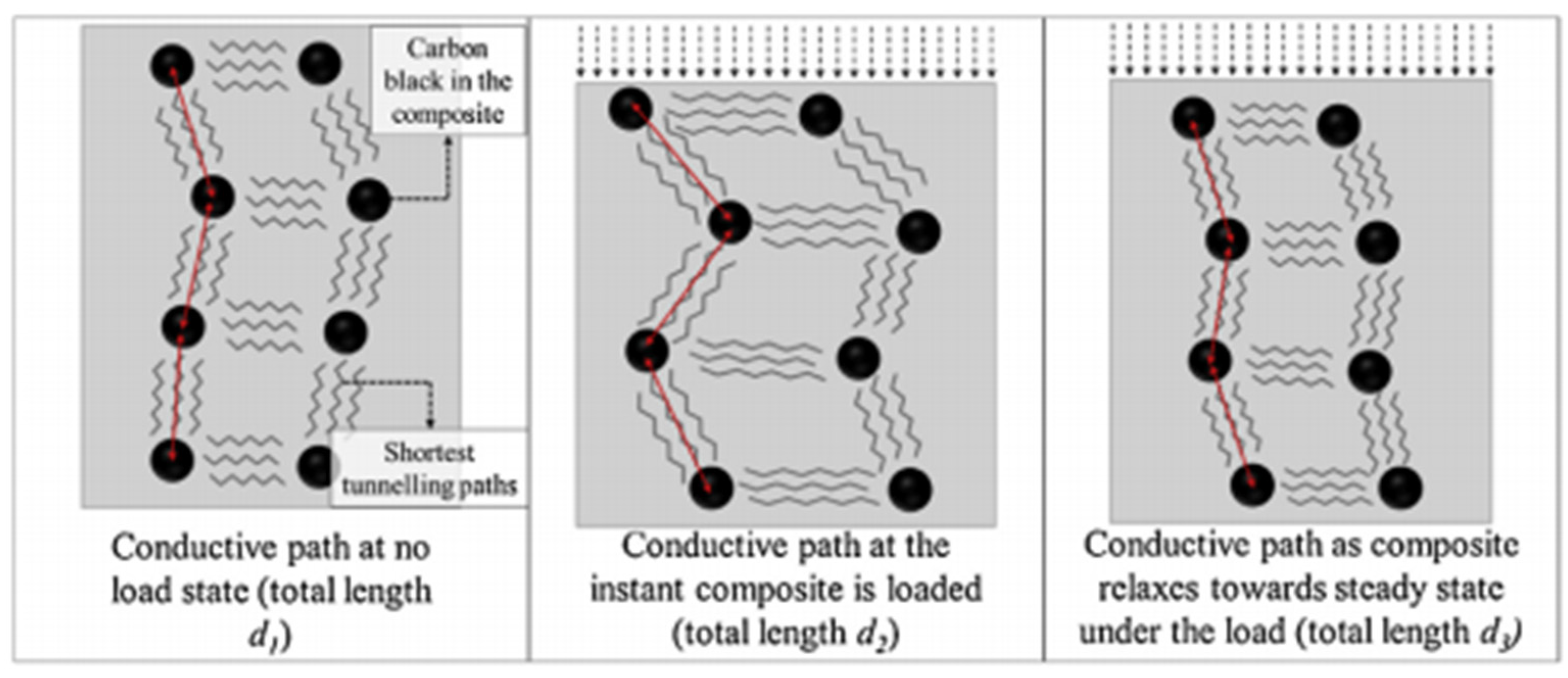
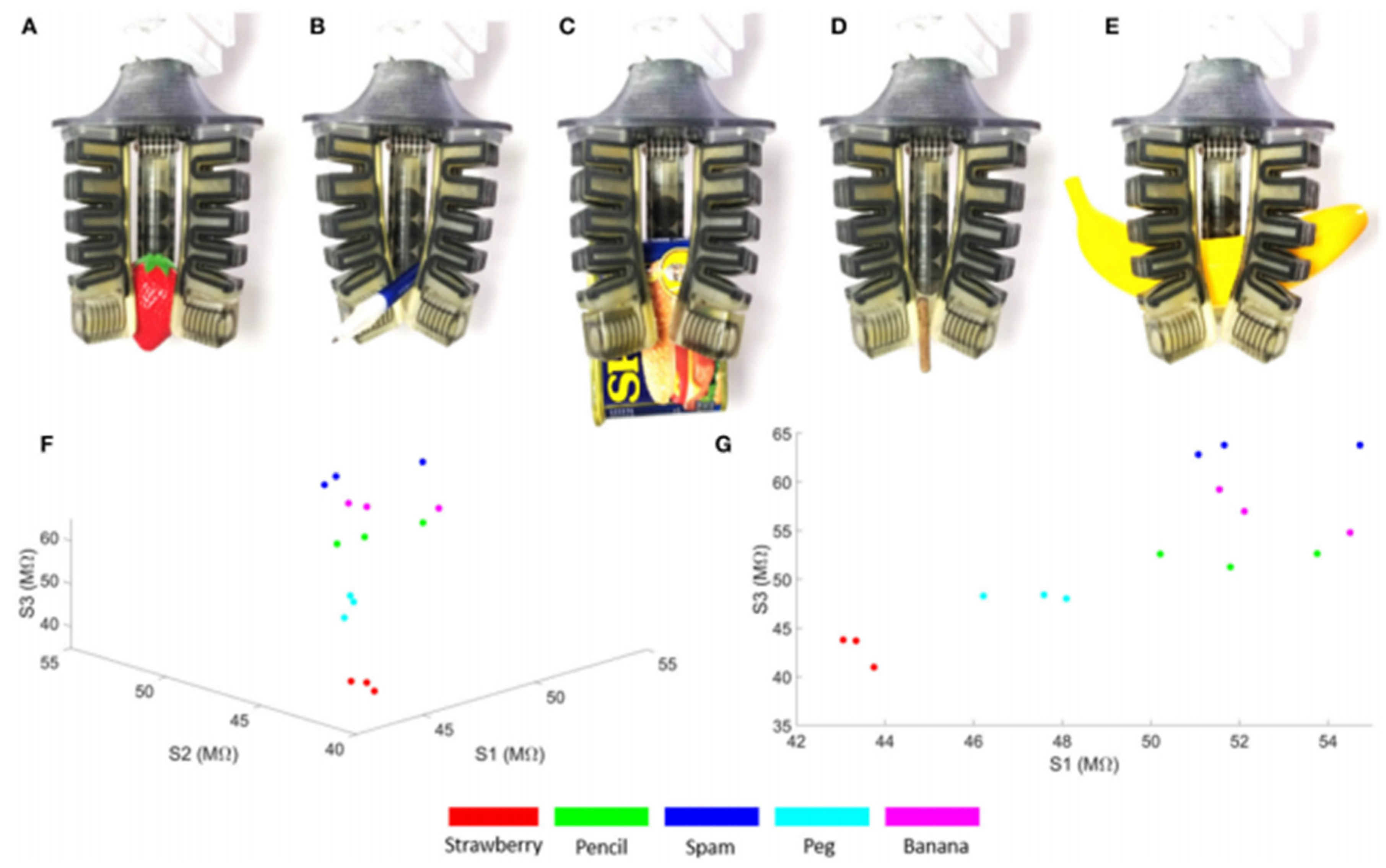
Semi conductive polymers have been used to construct both tactile and curvature sensors. They operate under the function that compressing the matter of a semi-conductive matrix will drive the conductive particles either closer together, decreasing resistance, or farther apart, increasing resistance, as in Figure 20. Either change can be detected and utilized to locate the contact or estimate the curvature [78,110,140,141]. These sensors can be 3D printed with multi material printing [11,110], or by mixing carbon powder with silicone [140], or through the use of conductive hydrogels [141]. These sensors provide good consistency with a wide range of sensitivity and curvature constraints for different applications, as in Figure 21. A soft robotic gripper is constructed and tested using a similar sensor technology and fabrication method by Shih et al. [142].
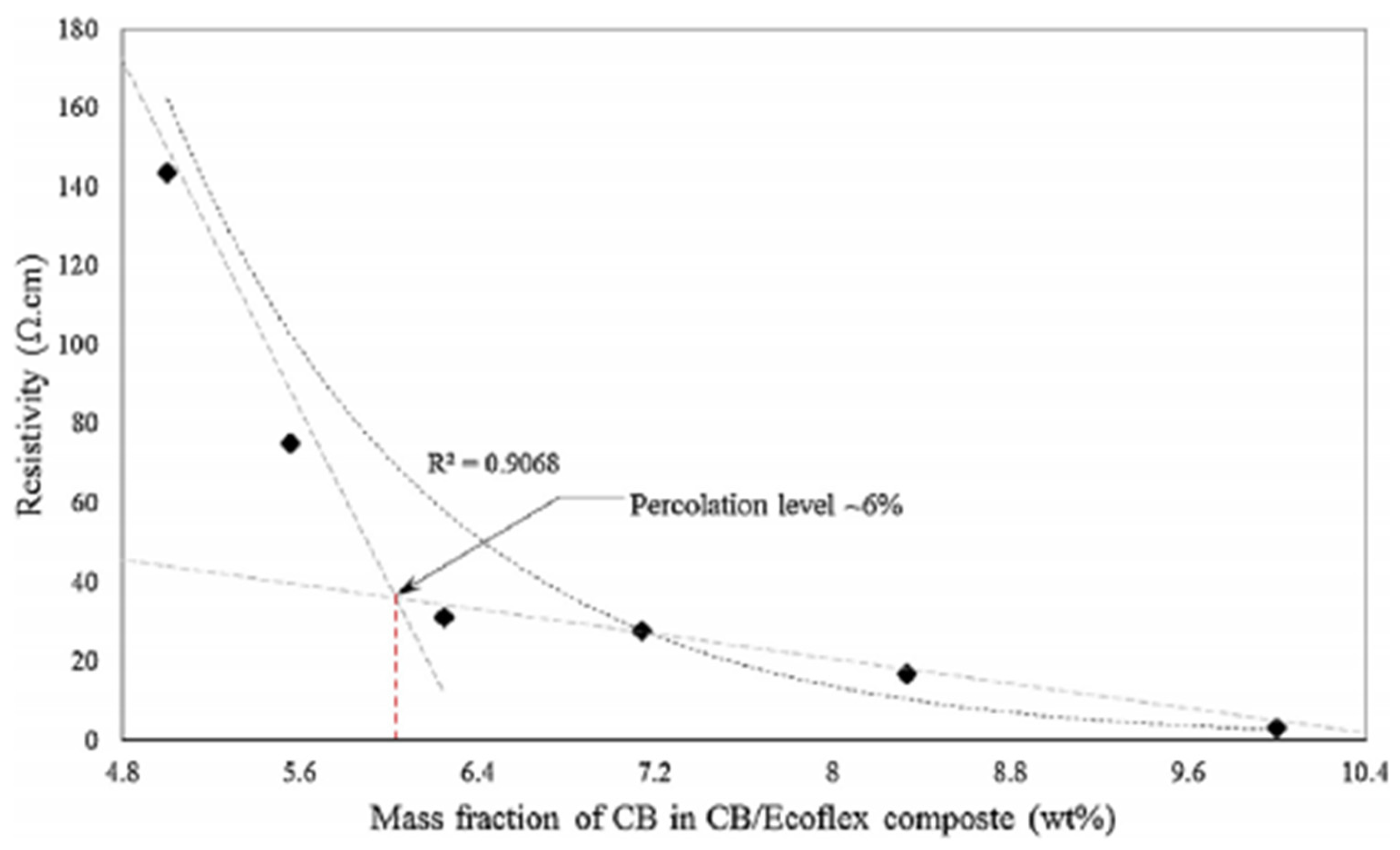
The use of carbon black suspended in silicone to construct contact sensors presents its own challenges. The foremost of these is the consistent homogeneity of the carbon-silicon blend [140], which is extremely important to the reliability of the sensor. Devaraj et al. found that different carbon concentrations in the mixture yielded different sensitivities to pressure and noise, the relation of which can be observed in Figure 22. Ultimately it was found that a 10% carbon black mixture provides a noisier response, but faster and with lower hysteresis than a 5% mixture [140].
Conductive hydrogels (CH) function similarly to the carbon black and silicone mixture, however, the capacitance of the material can be fine-tuned depending on the ions used to make the CH; additionally, CHs are biocompatible, allowing further exploration of soft robotics into the medical field [141]. CH structures are cast into molds for manufacture.
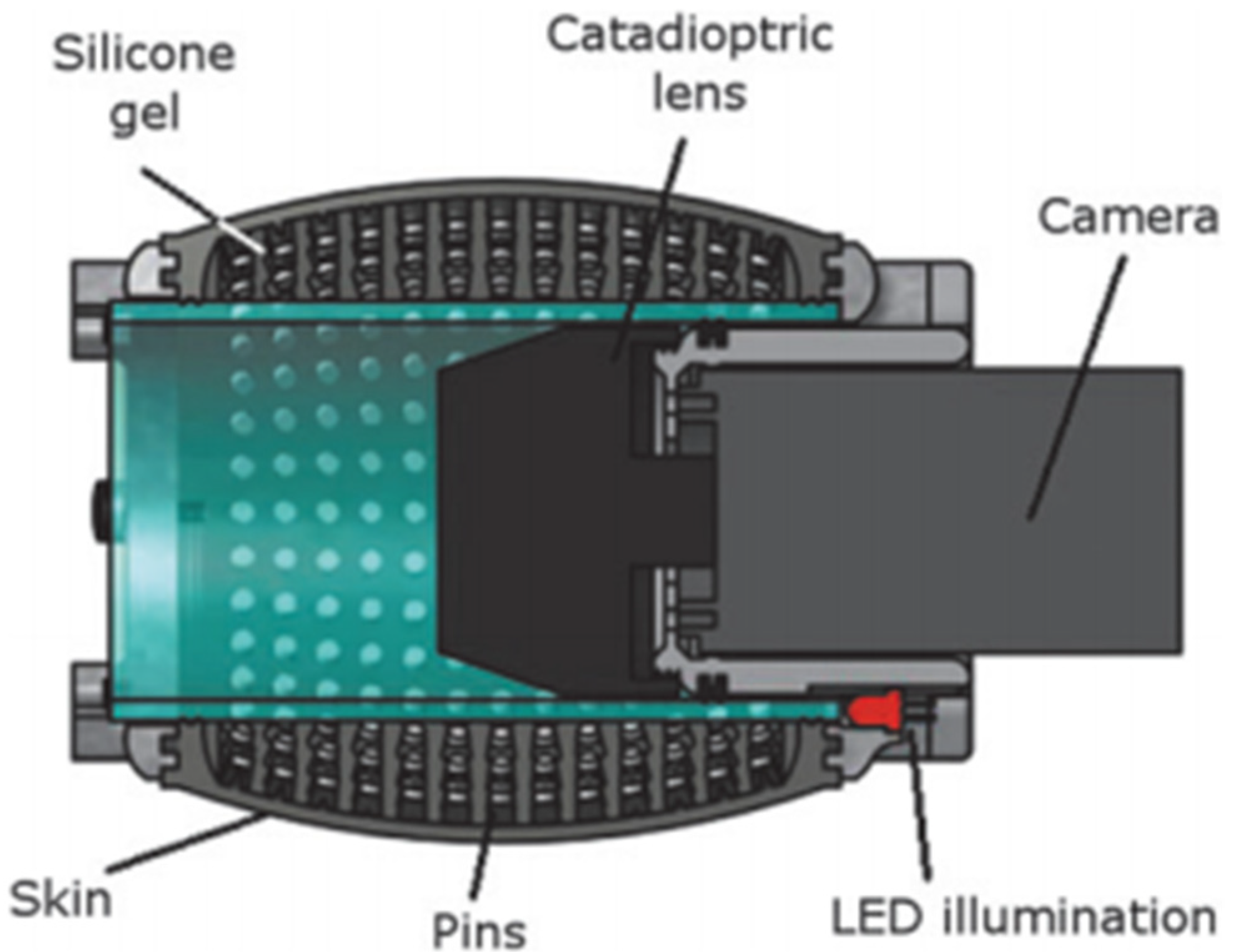
Fiber optic sensors are promising avenues of sensor research because of their flexibility, negligible hysteresis, and speed. Optical sensors may either visually track the soft robot [28], or may rely on detecting wavelength shift in a fiber optic cable due to the stretching and bending of the fiber optic [145,146]. Visual tracking tactile sensors rely on point capture systems on the interior of the sensor wall, as in the Tactip sensors [28]. These sensors are 3D printed using a dual extrusion process to print flexible black material and hard white material to provide accurate and detailed point-maps for the camera to detect. Any deviation from the normal pattern of white dots indicates contact, as in Figure 23. This method of contact sensing can be extremely accurate; however, it does require image processing, which must be handled with supplementary computers.
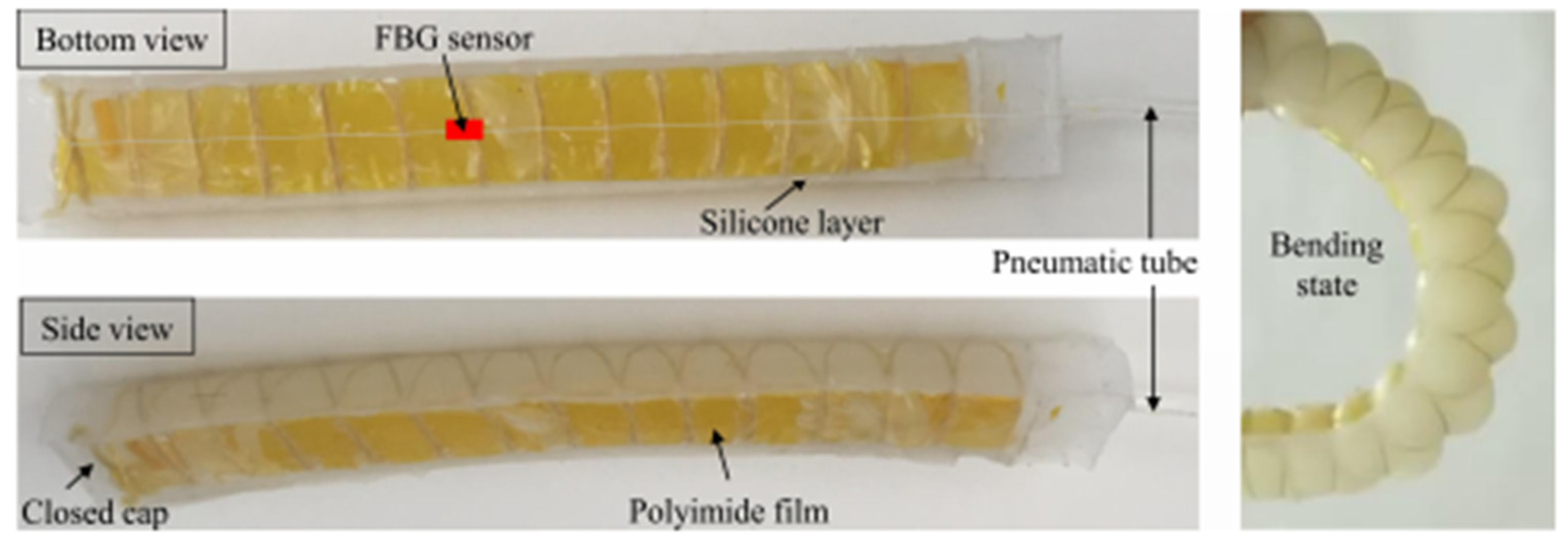
Fiber optic cables are used to detect curvature in a soft robot structure, and are known as Fiber Bragg Gratings, or FBGs [145]. FBGs operate based on detecting shifts in wavelength as the optic cable is bent [146]. Fiber optic cables are thin and flexible, and therefore do not reduce the freedom of the soft actuator itself. FBGs are also resistant to external interference, compared to electromagnetic sensors [145]. In Figure 24, the installation of an FBG sensor into a soft robotic actuator is presented.
As shown in the Table 4, various sensors are compared based on different mechanisms, materials, functionalities. Four different types of mechanisms are reviewed in this paper: Resistive, Piezoresistive, Magnetic, and Optical. Even if the mechanism is the same, each paper that is referenced in the table uses different materials and aims for different functionality. The most common functionalities are curvature, tactile, and strain sensors.
6. Summary and Outlook
The goal of this review work is to provide various information of soft pneumatic actuators to new researchers and innovators in the field of soft robotics, and to help experienced researchers attempting to stay up to date on recent advances in their field. This review has covered some of the recent developments in soft robotics to serve as a compendium of knowledge and a springboard for others in the field. The developments facilitated the widespread adoption of soft robotics in the industry, primarily maximizing repeatability, manufacturability, and of adequate control and stability of the robot.
Soft robotics provided a solution to human-robot interfaces in a safe and effective manner and serve a multitude of functions in medical, industrial, or commercial applications [147,148,149,150]. Also, integration of various new technologies has helped push the boundaries of soft robotics. Many of soft robotics projects ultimately attempted to make soft robotics more controllable, more predictable, more robust, and more manufacturable through innovation and study [151,152,153,154]. In addition to various attempts, there is still much to learn and explore in the field of soft robotics, particularly in regards to flexible power supplies, flexible drive components [147], and onboard controllers, which represent the next obstacles to the commercialization of soft robotics [10,21].
Author Contributions
Conceptualization, M.S., J.W., and C.H.; methodology, J.W.; validation, All; formal analysis, M.S., J.W., and T.Z.; investigation, All; resources, All; data curation, All; writing—original draft preparation, J.W., T.Z., C.H., F.S.S., S.K., S.Y.; writing—review and editing, J.W., T.Z., M.S.; supervision, M.S.; project administration, M.S. All authors have read and agreed to the published version of the manuscript.
Acknowledgments
The authors would like to thank the Mechanical Engineering Department at Georgia Southern University for their dedication to and support for undergraduate research.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results, since no funding was received.
References
- Saigo, H.; Naruse, M.; Okamura, K.; Hori, H.; Ojima, I. Analysis of Soft Robotics Based on the Concept of Category of Mobility. Complexity 2019, 2019, 1490541. [Google Scholar] [CrossRef]
- Shiva, A.; Stilli, A.; Noh, Y.; Faragasso, A.; De Falco, I.; Gerboni, G.; Cianchetti, M.; Menciassi, A.; Althoefer, K.; Wurdemann, H.A. Tendon-Based Stiffening for a Pneumatically Actuated Soft Manipulator. IEEE Robot. Autom. Lett. 2016, 1, 632–637. [Google Scholar] [CrossRef] [Green Version]
- Pawlowski, B.; Sun, J.; Xu, J.; Liu, Y.; Zhao, J. Modeling of Soft Robots Acuated by Twisted-and-Coiled Actuators. IEEE/ASME Trans. Mechatron. 2019, 24, 5–15. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, Fabrication, and Control of Soft Robots. Naure 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zinn, M.; Khatib, O.; Roth, B.; Salisbury, J.K. Actuation Methods for Human-Centered Robotics and Associated Control Challenges. In Control Problems in Robotics; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2003; Volume 4, pp. 105–119. [Google Scholar]
- Shepherd, R.F.; Stokes, A.A.; Freake, J.; Barber, J.; Snyder, P.W.; Mazzeo, A.D.; Cademartiri, L.; Morin, S.A.; Whitesides, G.M. Using Explosions to Power a Soft Robot. Angew. Chem. 2013, 125, 7868–7871. [Google Scholar] [CrossRef]
- Sumbre, G.; Fiorito, G.; Flash, T.; Hochner, B. Octopu uses Human-Like Strategy to Control Point-to-Point Arm Movement. Curr. Biol. 2006, 16, 767–772. [Google Scholar] [CrossRef] [Green Version]
- Webster, R.J.; Jones, B.A. Design and Kinematic Modeling of Constant Curvature Continuum Robotics: A Review. Int. J. Robot. Res. 2010, 29. [Google Scholar] [CrossRef]
- Jones, B.A.; Walker, I.D. Kinematics for Multisection Continuum Robots. IEEE Trans. Robot. 2006, 22, 43–55. [Google Scholar] [CrossRef]
- Onal, C.D.; Chen, X.; Whitesides, G.M.; Rus, D. Soft Mobile Robots with on-board Chemical Pressure Generation. In International Symposium on Robotics Research; Springer: Cham, Switzerland, 2017; Volume 100, pp. 525–540. [Google Scholar]
- Shih, B.; Christianson, C.; Gillespie, K.; Lee, S.; Mayeda, J.; Huo, Z.; Tolley, M.T. Design Considerations for 3D Printed, Soft, Multimaterial Resistive Sensors for Soft Robotics. Front. Robot. AI 2019. [Google Scholar] [CrossRef] [Green Version]
- Skorina, E.H.; Luo, M.; Oo, W.Y.; Tao, W.; Chen, F.; Youssefian, S.; Rahbar, N.; Onal, C.D. Reverse Pneumatic Artificial Muscles (RPAMs): Modeling, Integration, and Control. PLoS ONE 2018, 10. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Li, Y.; Elsamadisi, A.; Shepherd, R. Scalable Manufacturing of High Force Wearable Soft Actuators. Extreme Mech. Lett. 2015, 3, 89–104. [Google Scholar] [CrossRef]
- Laschi, C.; Cianchetti, M.; Mazzolai, B.; Margheri, L.; Follador, M.; Dario, P. Soft robot arm inspired by the octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kellaris, N.; Venkata, V.G.; Smith, G.M.; Mitchell, S.K.; Keplinger, C. Peano-hasel Actuators: Muscle-mimetic, Electrohydraulic Transducers that Linearly Contract on Activation. Sci. Robot. 2018, 3. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Fumiya, I. Deformation in Soft-Matter Robotiics: A Categorization and Quanitative Characterization. IEEE Robot. Autom. Mag. 2015, 22, 125–139. [Google Scholar] [CrossRef]
- Farrow, N.; Correll, N. A soft pneumatic actuator that can sense grasp and touch. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2317–2323. [Google Scholar]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. A recipe for soft fluicic elastomer robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef] [Green Version]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft Robotics for Chemists. Angew. Chem. 2011, 123, 1930–1935. [Google Scholar] [CrossRef]
- Wehner, M.; Tolley, M.T.; Mengüç, Y.; Park YMozika, A.; Ding, Y.; Onal, C.; Shepherd, R.F.; Whitesides, G.M. Pneumatic Energy Sources for Autonomous and Wearable Soft Robotics. Soft Robot. 2014, 1, 263–274. [Google Scholar] [CrossRef] [Green Version]
- Decker, M. Soft Robotics and Emergent Materials in Architecture. In Proceedings of the Real Time eCAADe Conference, Vienna, Austria, 16–18 September 2015; Volume 2, pp. 409–416. [Google Scholar]
- Yap, H.K.; Ng, H.Y.; Yeow, C.H. High-force Soft Printable Pneumatics for Soft Robotic Applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- Peele, B.N.; Wallin, T.J.; Zhao, H.; Shepherd, R.F. 3D Printing Antagonistic Systems of Artificial Muscle Using Projection Stereolithography. Bioinspir. Biomim. 2015, 10. [Google Scholar] [CrossRef]
- MacCurdy, R.; Katzschmann, R.; Kim, Y.; Rus, D. Printable Hydraulics: A Method for Fabricating Robots by 3D co-printing Solids and Liquids. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.; Wood, R.J.; Lewis, J.A. Soft Somatosensitive Actuators via Embedded 3D Printing. Adv. Mater. 2018. [Google Scholar] [CrossRef] [Green Version]
- Jackson, N.; Chastain, P.; Crowther, M.; Shin, M. Development of Fast Prototyping Pneumatic Actuated Grippers. Int. J. Precis. Eng. Manuf. 2019, 20, 2183–2192. [Google Scholar] [CrossRef]
- Ward-Cherrier, B.; Pestell, N.; Cramphorn, L.; Winstone, B.; Giannaccini, M.E.; Rossiter, J.; Lepora, N.F. The TacTip Family: Soft Optical Tactile Sensors with 3D-Printed Biomimetic Morphologies. Soft Robot. 2018, 5, 216–227. [Google Scholar] [CrossRef] [Green Version]
- Luo, M.; Agheli, M.; Onal, C.D. Theoretical Modeling and Experimental Analysis of a Pressure-operated Soft Robotic Snake. Soft Robot. 2014, 1, 136–146. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A Novel Type of Compliant, Underactuated Robotic Hand for Dexterous Grasping. Int. J. Robot. Res. 2015, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Walker, I.D.; Dawson, D.M.; Flash, T.; Grasso, F.W.; Hanlon, R.T.; Hochner, B.; Kier, W.M.; Pagano, C.C.; Rahn, C.D.; Zhang, Q.M. Continuum Robot Arms Inspired by Cephalopods. Proc. SPIE 2005, 5804, 303–314. [Google Scholar]
- Runge, G.; Raatz, A. A Framework for the Automated Design and Modelling of Soft Robotic Systems. CIRP Ann. Manuf. Technol. 2017, 66, 9–12. [Google Scholar] [CrossRef]
- Napp, N.; Araki, B.; Tolley, M.T.; Nagpal, R.; Wood, R.J. Simple Passive Valves for Addressable Pneumatic Actuation. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1440–1445. [Google Scholar]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Goh JC, H.; Yeow RC, H. A Soft Exoskeleton for Hand Assistive and Rehabilitation Application Using Pneumatic Actuators with Variable Stiffness. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4967–4972. [Google Scholar]
- Lin, H.T.; Leisk, G.G.; Trimmer, B. GoQBot: A Caterpillar-inspired Soft-bodied Rolling Robot. BioInspir. Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B. Lessons from Animals and Plants: The Symbiosis of Morphological Computation and Soft Robotics. IEEE Robot. Autom. Mag. 2016. [Google Scholar] [CrossRef]
- Vikas, V.; Cohen, E.; Grassi, R.; Sozer, C.; Trimmer, B. Design and Locomotion Control of a Soft Robot Using Friction Manipulation and Motor–Tendon Actuation. IEEE Trans. Robot. 2016, 32, 949–959. [Google Scholar] [CrossRef] [Green Version]
- Faudzi, A.A.M.; Ooga, J.; Goto, T.; Takeichi, M.; Suzumori, K. Index Finger of a Human-Like Robotic Hand Using Thin Soft Muscles. IEEE Robot. Autom. Lett. 2017, 3, 92–99. [Google Scholar] [CrossRef]
- Park, Y.; Wood, R.J. Smart Pneumatic Artificial Muscle Actuator with Embedded Microfluidic Sensing. In Proceedings of the IEEE Sensors, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar]
- Ranzani, T.; Gerboni, G.; Cianchetti, M.; Menciassi, A. A Bioinspired Soft Manipulator for Minimally Invasive Surgery. Bioinspir. Biomim. 2015, 10, 035008. [Google Scholar] [CrossRef] [PubMed]
- Benjamin, W.K.; Yeow, C.-H. 3D Printed Soft Pneumatic Actuators with Intent Sensing for Hand Rehabilitative Exoskeletons. In Proceedings of the Internation Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Berring, J.; Kianfar, K.; Lira, C.; Menon, C.; Scarpa, F. A Smart Hydraulic Joint for Future Implementation in Robotic Structures. Robotica 2010, 28, 1045–1056. [Google Scholar] [CrossRef]
- Marchese, A.D.; Tedrake, R.; Rus, D. Dynamics and Trajectory Optimization for a Soft Spatial Fluidic Elastomer Manipulator. J. Robot. Res. 2016, 35, 1000–1019. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; Marchese, A.D.; Rus, D. Hydraulic Autonomous Soft Robotics Fish for 3D Swimming. In International Symposium on Experimental Robotics; Marrakech & Essaouira: Essaouira, Morocco, 2014; pp. 405–420. [Google Scholar]
- Li, Y.; Chen, Y.; Li, Y. Pre-Charged Pneumatic Soft Gripper with Closed-Loop Control. IEEE Robot. Autom. Lett. 2018, 2, 1292–1298. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Manti, M.; Laschi, C. Stable Open Loop Control of Soft Robotic Manipulators. IEEE Robot. Autom. Lett. 2018, 3, 1292–1298. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.; Whiteshides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Sanan, S.; Lynn, P.S.; Griffith, S.T. Pneumatic Torsional Actuators for Inflatable Robots. J. Mech. Robot. 2014, 6, 031003. [Google Scholar] [CrossRef]
- Low, J.H.; Cheng, N.; Khin, P.M.; Thakor, N.V.; Kukreja, S.L.; Ren, H.L.; Yeow, C.H. A Bidirectional Soft Pneumatic Fabric-based Actuator for Grasping Applications. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Tolley, M.T.; Shepherd, R.F.; Karpelson, M.; Bartlett, N.; Galloway, K.C.; Wehner, M.; Nunes, R.; Whitesides, G.M.; Wood, R.J. An Untethered Jumping Soft Robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 561–566. [Google Scholar]
- Majidi, C.; Shepherd, R.F.; Kramer, R.K.; Whitesides, G.M.; Wood, R.J. Influence of Surface Traction on Soft Robot Undulation. Int. J. Robot. Res. 2013, 32, 1577–1584. [Google Scholar] [CrossRef]
- Amend, J.R.; Brown, E.M.; Rodenberg, N.; Jaeger, H.M.; Lipson, H. A Positive Pressure Universal Gripper Based on the Jamming of Granular Material. IEEE Trans. Robot. 2012, 28, 341–350. [Google Scholar] [CrossRef]
- Krahn, J.M.; Fabbro, F.; Menon, C. A Soft-touch Gripper for Grasping Delicate Objects. IEEE/ASME Trans. Mechatron. 2017, 22, 1276–1286. [Google Scholar] [CrossRef]
- Drotman, D.; Ishida, M.; Jadhav, S.; Tolley, M.T. Application-Driven Design of Soft, 3D Printed, Pneumatic Actuators with Bellows. IEEE Trans. Mechatron. 2018, 24. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Lohse, N.; Jackson, M. Bending Angle Prediction and Control of Soft Pneumatic Actuators with Embedded Flex Sensors—A Data-driven Approach. Mechatronics 2018, 50, 234–247. [Google Scholar] [CrossRef] [Green Version]
- Deimel, R.; Brock, O. A Compliant Hand Based on a Novel Pneumatic Actuator. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2047–2053. [Google Scholar]
- Memarian, M.; Gorbet, R.; Kulić, D. Control of Soft Pneumatic Finger-like Actuators for Affective Motion Generation. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1691–1697. [Google Scholar]
- Della Santina, C.; Bianchi, M.; Grioli, G.; Angelini, F.; Catalano, M.; Garabini, M.; Bicchi, A. Controlling Soft Robots: Balancing Feedback and Feedforward Elements. IEEE Robot. Autom. Mag. 2017, 24, 75–83. [Google Scholar] [CrossRef] [Green Version]
- Kumar, R.; Srivastava, S.; Gupta, J.R.P. Online Modeling and Adaptive Control of Robotic Manipulators Using Gaussian Radial Basis Function Networks. Neural Comput. Appl. 2018, 30, 223–239. [Google Scholar] [CrossRef]
- Somm, L.; Hahn, D.; Kumar, N.; Coros, S. Expanding Foam as the Material for Fabrication, Prototyping and Experimental Assessment of Low-Cost Soft Robots with Embedded Sensing. IEEE Robot. Autom. Lett. 2019, 4, 761–768. [Google Scholar] [CrossRef] [Green Version]
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.; Park, Y. Design of a Lightweight Soft Robotic Arm Using Pneumatic Artificial Muscles and Inflatable Sleeves. Soft Robot. 2017, 5, 207–215. [Google Scholar] [CrossRef] [Green Version]
- Case, J.C.; Yuen, M.C.; Jacobs, J.; Kramer-Bottiglio, R. Robotic Skins That Learn to Control Passive Structures. IEEE Robot. Autom. Lett. 2019, 4, 2485–2492. [Google Scholar] [CrossRef]
- Gerboni, G.; Diodato, A.; Ciuti, G.; Cianchetti, M.; Menciassi, A. Feedback Control of Soft Robot Actuators via Commercial Flex Bend Sensors. IEEE/ASME Trans. Mechatron. 2017, 22, 1881–1888. [Google Scholar] [CrossRef]
- Shintake, J.; Rosset, S.; Schubert, B.; Floreano, D.; Shea, H. Versatile Soft Grippers with Intrinsic Electroadhesion Based on Multifunctional Polymer Actuators. Adv. Mater. 2015, 28. [Google Scholar] [CrossRef]
- Christianson, C.; Goldberg, N.N.; Deheyn, D.; Cai, S.; Tolley, M.T. Translucent Soft Robots Driven by Frameless Fluid Electrode Dielectric Elastomer Actuators. Sci. Robot. 2018, 3, eaat1893. [Google Scholar] [CrossRef] [Green Version]
- León-Vargas, F.; Garelli, F.; De Battista, H.; Vehí, J. Postprandial Blood Glucose Control Using a Hybrid Adaptive PD Controller with Insulin-on-board Limitation. Biomed. Signal Process. Control 2013, 8, 724–732. [Google Scholar] [CrossRef]
- Mutlu, R.; Sariyildiz, E.; Nozaki, T.; Alici, G. Design of a Multi-Stage Stiffness Enhancing Unit for a Soft Robotic Finger and its Robust Motion Control. In Proceedings of the 44th Annual Conference of the IEEE Industrial Electronics Society (IECON 2018), Washington, WA, USA, 20–23 October 2018; pp. 5074–5079. [Google Scholar]
- Haghshenas-Jaryani, M.; Pande, C.; Muthu Wijesundara, B.J. Soft Robotic Bilateral Hand Rehabilitation System for Fine Motor Learning. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; p. 337. [Google Scholar]
- Kalisky, T.; Wang, Y.; Shih, B.; Drotman, D.; Jadhav, S.; Aronoff-Spencer, E.; Tolley, M.T. Differential Pressure Control of 3D Printed Soft Fluidic Actuators. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Russo, S.; Ranzani, T.; Walsh, C.J.; Wood, R.J. An Additive Millimeter-Scale Fabrication Method for Soft Biocompatible Actuators and Sensors. Adv. Mater. Technol. 2017, 2, 1700135. [Google Scholar] [CrossRef]
- Li, Q.; Chen, Y.; Ren, T.; Hu, Y. Passive and Active Particle Damping in Soft Robotic Actuators. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 20–25 May 2018; pp. 1547–1552. [Google Scholar]
- Li, Y.; Chen, Y.; Yang, Y.; Wei, Y. Passive Particle Jamming and Its Stiffening of Soft Robotic Grippers. IEEE Trans. Robot. 2017, 33, 446–455. [Google Scholar] [CrossRef]
- Wang, Z.; Hirai, S. Soft Gripper Dynamics Using a Line-Segment Model with an Optimization-Based Parameter Identification Method. IEEE Robot. Autom. Lett. 2017, 2, 624–631. [Google Scholar] [CrossRef]
- Loo, J.Y.; Tan, C.P.; Nurzaman, S.G. H-infinity Based Extended Kalman Filter for State Estimation in Highly Non-linear Soft Robotic System. In Proceedings of the American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 5154–5160. [Google Scholar]
- Lee, D.; Koh, J.; Kim, J.; Kim, S.; Cho, K. Deformable Wheel Robot Based on Soft Material. Int. J. Precis. Eng. Manuf. 2013, 14, 1439–1445. [Google Scholar] [CrossRef]
- Ainla, A.; Verma, M.S.; Yang, D.; Whitesides, G.M. Soft, Rotating Pneumatic Actuator. Soft Robot. 2017, 4, 297–304. [Google Scholar] [CrossRef] [Green Version]
- Nagaoka, T.; Mao, Z.; Takemura, K.; Yokota, S.; Kim, J. ECF (Electro-conjugate fluid) Finger with Bidirectional Motion and its Application to a Flexible Hand. Smart Mater. Struct. 2018, 28. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Morin, S.A.; Ilievski, F.; Whitesides, G.M. A Hybrid Combining Hard and Soft Robots. Soft Robot. 2014, 1, 70–74. [Google Scholar]
- Shapiro, Y.; Wolf, A.; Gabor, K. Bi-bellows: Pneumatic Bending Actuator. Sens. Actuators A Phys. 2011, 167, 484–494. [Google Scholar] [CrossRef]
- Yang, D.; Verma, M.S.; So, J.; Mosadegh, B.; Keplinger, C.; Lee, B.; Khashai, F.; Lossner, E.; Suo, Z.; Whitesides, G.M. Buckling Pneumatic Linear Actuators Inspired by Muscle. Adv. Mater. Technol. 2016, 1. [Google Scholar] [CrossRef]
- Elsayed, Y.; Lekakou, C.; Geng, T.; Saaj, C. Design Optimization of Soft Silicone Pneumatic Actuators Using Finite Element Analysis. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Besacon, France, 8–11 July 2014. [Google Scholar]
- Hwang, Y.; Paydar, O.H.; Candler, R.N. Pneumatic microfinger with Balloon Fins for Linear Motion Using 3D Printed Molds. Sens. Actuators A Phys. 2015, 234, 65–71. [Google Scholar] [CrossRef]
- Wakimoto, S.; Koichi, S.; Keiko, O. Miniature Pneumatic Curling Rubber Actuator Generating Bidirectional Motion with One Air-Supply Tube. Adv. Robot. 2011, 25, 1311–1330. [Google Scholar] [CrossRef] [Green Version]
- Bilodeau RA, R.; White, E.L.; Kramer, R.K. Monolithic Fabrication of Sensors and Actuators in a Soft Robotic Gripper. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Niiyama, R.; Rus, D.; Kim, S. Pouch Motors: Printable/inflatable Soft Actuators for Robotics. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6332–6337. [Google Scholar]
- Gorissen, B.; Reynaerts, D.; Konishi, S.; Yoshida, K.; Kim, J.; De Volder, M. Elastic Inflatable Actuators for Soft Robotic Applications. Adv. Mater. 2017, 29, 1604977. [Google Scholar] [CrossRef]
- Shintake, J.; Sonar, H.; Piskarev, E.; Paik, J.; Floreano, D. Soft Pneumatic Gelatin Actuator for Edible Robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Takashima, K.; Sugitani, K.; Morimoto, N.; Sakaguchi, S.; Noritsugu, T.; Mukai, T. Pneumatic Artificial Rubber Muscle Using Shape-memory Polymer Sheet with Embedded Electrical Heating Wire. Smart Mater. Struct. 2014, 23, 12. [Google Scholar] [CrossRef]
- Comber, D.; Slightam, J.; Barth, E.J.; Gervasi, V.R.; Webster, R.J. Design and Precision Control of an MR-Compatible Flexible Fluidic Actuator. In Proceedings of the ASME/BATH 2013 Symposium on Fluid Power and Motion Control, Sarasota, FL, USA, 6–9 October 2013. [Google Scholar]
- Niiyama, R.; Sun, X.; Sung, C.; An, B.; Rus, D.; Kim, S. Pouch Motors: Printable Soft Actuators Integrated with Computational Design. Soft Robot. 2015, 2, 59–70. [Google Scholar] [CrossRef]
- Patel, D.K.; Sakhaei, A.H.; Layani, M.; Zhang, B.; Ge, Q.; Magdassi, S. Highly Stretchable and UV Curable Elastomers for Digital Light Processing Based 3D Printing. Adv. Mater. 2017, 29, 1606000. [Google Scholar] [CrossRef]
- Robertson, M.A.; Sadeghi, H.; Florez, J.M.; Paik, J. Soft Pneumatic Actuator Fascicles for High Force and Reliability. Soft Robot. 2017, 4, 23–32. [Google Scholar] [CrossRef] [Green Version]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H. Universal Robotic Gripper Based on the Jamming of Granular Material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef] [Green Version]
- Amend, J.; Cheng, N.; Fakhouri, S.; Culley, B. Soft Robotics Commercialization: Jamming Grippers from Research to Product. Soft Robot. 2016, 3, 213–222. [Google Scholar] [CrossRef]
- Paek, J.; Cho, I.; Kim, J. Microrobotic tentacles with spiral bendingcapability based on shape-engineered elastomeric microtubes. Sci. Rep. 2015, 5, 2045–2322. [Google Scholar]
- Walker, S.; Rueben, J.; Van Volkenburg, T.; Hemleben, S.; Grimm, C.; Simonsen, J.; Mengüç, Y. Using an environmentally benign and degradable elastomer in soft robotics. Int. J. Intell. Robot. Appl. 2017, 1, 124–142. [Google Scholar] [CrossRef]
- Huynh, T.P.; Hossam, H. Advanced Materials of Use in Soft Self-Healing Devices. Adv. Mater. 2017, 29, 1604973. [Google Scholar] [CrossRef] [Green Version]
- Rueben, J.; Walker, S.; Huhn, S.; Simonsen, J.; Mengüç, Y. Developing a UV-Curable, Environmentally Benign and Degradable Elastomer for Soft Robotics. Biomater. Soft Mater. 2018, 3, 1551–1556. [Google Scholar]
- Allen, E.A.; Taylor, L.D.; Swensen, J.P. Smart material composites for discrete stiffness materials. Smart Mater. Struct. 2019, 28. [Google Scholar] [CrossRef]
- Suzumori, K.; Endo, S.; Kanda, T.; Kato, N.; Suzuki, H. A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot. In Proceedings of the International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 4975–4980. [Google Scholar]
- Belding, L.; Baytekin, B.; Baytekin, H.T.; Rothemund, P.; Verma, M.S.; Nemiroski, A.; Sameoto, D.; Grzybowski, B.A.; Whitesides, G.M. Slit Tubes for Semisoft Pneumatic Actuators. Adv. Mater. 2018, 30. [Google Scholar] [CrossRef] [Green Version]
- Goldfarb, M.; Barth, E.; Gogola, M.A.; Wehrmeyer, J.A. Design and energetic characterization of a liquid-propellant-powered actuator for self-powered robots. IEEE/ASME Trans. Mechatron. 2003, 8, 254–262. [Google Scholar] [CrossRef]
- Maghooa, F.; Stilli, A.; Noh, Y.; Althoefer, K.; Wurdemann, H. Tendon and pressure actuation for a bio-inspired manipulator based on an antagonistic principle. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; ISBN 978-1-4799-6923-4. [Google Scholar]
- Fraś, J.; Czarnowski, J.; Maciaś, M.; Główka, J.; Cianchetti, M.; Menciassi, A. New STIFF-FLOP module construction idea for improved actuation and sensing. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Banerjee, H.; Hongliang, R. Optimizing Double-Network Hydrogel for Biomedical Soft Robots. Soft Robot. 2017, 4, 191–201. [Google Scholar] [CrossRef]
- Yuk, H.; Lin, S.; Ma, C.; Takaffoli, M.; Fang, N.X.; Zhao, X. Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nat. Commun. 2017, 8, 14230. [Google Scholar] [CrossRef] [Green Version]
- Terryn, S.; Brancart, J.; Lefeber, D.; Van Assche, G.; Vanderborght, B. Self-healing soft pneumatic robots. Sci. Robot. 2017, 2, eaan4268. [Google Scholar] [CrossRef]
- Mac Murray, B.C.; An, X.; Robinson, S.S.; van Meerbeek, I.M.; O’Brien, K.W.; Zhao, H.; Shepherd, R.F. Poroelastic Foams for Simple Fabrication of Complex Soft Robots. Adv. Mater. 2015, 27, 1521–4095. [Google Scholar] [CrossRef] [PubMed]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft Robotic Grippers for Biological Sampling on Deep Reefs. Galloway. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Mousavi, S.; Howard, D.; Wu, S.; Wang, C. An Ultrasensitive 3D Printed Tactile Sensor for Soft Robotics. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Austria, 20–25 May 2018. [Google Scholar]
- Schaffner, M.; Faber, J.A.; Pianegonda, L.; Rühs, P.A.; Coulter, F.; Studart, A.R. 3D printing of Robotic Soft Actuators with Programmable Bioinspired Architectures. Nat. Commun. 2018, 9, 878. [Google Scholar] [CrossRef]
- Marchese, A.D.; Komorowski, K.; Onal, C.D.; Rus, D. Design and Control of a soft and continuously deformable 2D robotics manipulation system. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 1 May–7 June 2014; pp. 2189–2196. [Google Scholar]
- Morin, S.A.; Shepherd, R.F.; Kwok, S.W.; Stokes, A.A.; Nemiroski, A.; Whitesides, G.M. Camouflage and Display for Soft Machines. Science 2012, 337, 828–832. [Google Scholar] [CrossRef] [Green Version]
- Cianchetti, M.; Ranzani, T.; Gerboni, G.; Falco, I.D.; Laschi, C.; Menciassi, A. Stiff-flop surgical manipulator: Mechanical design and experimental characterization of the single module. In Proceedings of the International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3576–3581. [Google Scholar]
- Moseley, P.; Florez, J.M.; Sonar, H.A.; Agarwal, G.; Curtin, W.; Paik, J. Modeling, Design, and Development of Soft Pneumatic Actuators with Finite Element Method. Adv. Eng. Mater. 2016, 18, 978–988. [Google Scholar] [CrossRef]
- Hu, W.; Mutlu, R.; Li, W.; Alici, G. A Structural Optimisation Method for a Soft Pneumatic Actuator. Robotics 2018, 7, 24. [Google Scholar] [CrossRef] [Green Version]
- Alici, G.; Canty, T.; Mutlu, R.; Hu, W.; Sencadas, V. Modeling and Experimental Evaluation of Bending Behavior of Soft Pneumatic Actuators Made of Discrete Actuation Chambers. Soft Robot. 2017, 5. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [Green Version]
- Della Santina, C.; Pallottino, L.; Rus, D.; Bicchi, A. Exact Task Execution in Highly Under-Actuated Soft Limbs: An Operational Space Based Approach. IEEE Robot. Autom. Lett. 2019, 4, 2508–2515. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Best, C.M.; Gillespie, M.T.; Hyatt, P.; Rupert, L.; Sherrod, V.; Killpack, M.D. A New Soft Robot Control Method: Using Model Predictive Control for a Pneumatically Actuated Humanoid. IEEE Robot. Autom. Mag. 2016, 23, 75–84. [Google Scholar] [CrossRef]
- Meller, M.; Kogan, B.; Bryant, M.; Garcia, E. Model-based Feedforward and Cascade Control of Hydraulic McKibben Muscles. Sens. Actuators A Phys. 2018, 275, 88–98. [Google Scholar] [CrossRef]
- Hao, Y.; Wang, T.; Ren, Z.; Gong, Z.; Wang, H.; Yang, X.; Guan, S.; Wen, L. Modeling and experiments of a soft robotic gripper in amphibious environments. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417707148. [Google Scholar] [CrossRef]
- Guo, J.; Low, J.H.; Liang, X.; Lee, J.S.; Wong, Y.R.; Yeow, R.C.H. A Hybrid Soft Robotic Surgical Gripper System for Delicate Nerve Manipulation in Digital Nerve Repair Surgery. IEEE/ASME Trans. Mechatron. 2019, 4. [Google Scholar] [CrossRef]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. The Design and Mathematical Modelling of Novel Extensor Bending Pneumatic Artificial Muscles (EBPAMs) for Soft Exoskeletons. Robot. Auton. Syst. 2018, 99, 63–74. [Google Scholar] [CrossRef]
- Wall, V.; Deimel, R.; Brock, O. Selective Stiffening of Soft Actuators Based on Jamming. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 252–257. [Google Scholar]
- Li, Y.; Wei, Y.; Yang, Y.; Chen, Y. A novel versatile robotic palm inspired by human hand. Eng. Res. Express 2019, 1, 015008. [Google Scholar] [CrossRef]
- Yang, H.; Xu, M.; Li, W.; Zhang, S. Design and Implementation of a Soft Robotic Arm Driven by SMA Coils. IEEE Trans. Ind. Electron. 2019, 66, 6108–6116. [Google Scholar] [CrossRef]
- Gaiser, I.; Schulz, S.; Breitwieser, H.; Bretthauer, G.T. Enhanced Flexible Fluidic Actuators for Biologically Inspired Lightweight Robots with Inherent Compliance. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; pp. 1–6. [Google Scholar]
- Camarillo, D.B.; Carlson, C.R.; Salisbury, J.K. Configuration tracking for continuum manipulators with coupled tendon drive. IEEE Trans. Robot. 2009, 25, 798–808. [Google Scholar] [CrossRef]
- Lin, H.; Leisk, G.; Trimmer, B. Soft robots in space: A perspective for soft robotics. Acta Futura 2013, 6, 69–79. [Google Scholar]
- Onal, C.D.; Rus, D. Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot. Bioinspir. Biomim. 2013, 8, 026003. [Google Scholar] [CrossRef]
- Coevoet, E.; Morales-Bieze, T.; Largilliere, F.; Zhang, Z.; Thieffry, M.; Sanz-Lopez, M.; Carrez, B.; Marchal, D.; Goury, O.; Durlez, D. Software Toolkit for Modeling, Simulation, and Control of Soft Robots. Adv. Robot. 2017, 31, 1208–1224. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft manipulators and grippers: A review. Front. Robot. 2016, 3, 69. [Google Scholar] [CrossRef] [Green Version]
- Sonar, H.A.; Paik, J. Soft pneumatic actuator skin with piezoelectric sensors for vibrotactile feedback. Front. Robot. 2016. [Google Scholar] [CrossRef] [Green Version]
- White Edward, L.; Case Jennifer, C.; Kramer Rebecca, K. Multi-Mode Strain and Curvature Sensors for Soft Robotic Applications. Sens. Actuators A Phys. 2017, 253, 188–197. [Google Scholar] [CrossRef] [Green Version]
- Ozel, S.; Keskin, N.A.; Khea, D.; Onal, C.D. A Precise Embedded Curvature Sensor Module for Soft-Bodied Robots. Sens. Actuators A Phys. 2015, 236, 349–356. [Google Scholar] [CrossRef]
- Paulino, T.; Ribeiro, P.; Neto, M.; Cardoso, S.; Schmitz, A.; Santos-Victor, J.; Bernardino, A.; Jamone, L. Low-Cost 3-Axis Soft Tactile Sensors for the Human-Friendly Robot Vizzy. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar] [CrossRef]
- Wang, H.; de Boer, G.; Kow, J.; Alazmani, A.; Ghajari, M.; Hewson, R.; Culmer, P. Design Methodology for Magnetic Field-Based Soft Tri-Axis Tactile Sensors. Sensors 2016, 16, 1356. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Devaraj, H.; Yellapantula, K.; Stratta, M.; McDaid, A.; Aw, K. Embedded Piezoresistive Pressure Sensitive Pillars from Piezoresistive Carbon Black Composites towards a Soft Large-Strain Compressive Load Sensor. Sens. Actuators A Phys. 2019, 285, 645–651. [Google Scholar] [CrossRef]
- Zhou, Y.; He, B.; Yan, Z.; Shang, Y.; Wang, Q.; Wang, Z. Touch Locating and Stretch Sensing Studies of Conductive Hydrogels with Applications to Soft Robots. Sensors 2018, 18, 569. [Google Scholar] [CrossRef] [Green Version]
- Shih, B.; Drotman, D.; Christianson, C.; Hou, Z.; White, R.; Christensen, H.I.; Tolley, M.T. Custom Soft Robotic Gripper Sensor Skins for Haptic Object Visualization. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Homberg, B.S.; Katzschmann, R.K.; Dogar, M.R.; Rus, D. Haptic Identification of Objects using a Modular Soft Robotic Gripper. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Truby, R.L.; Katzschmann, R.K.; Lewis, J.A.; Rus, D. Soft Robotic Fingers with Embedded Ionogel Sensors and DiscreteActuation Modes for Somatosensitive Manipulation. In Proceedings of the 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019. [Google Scholar]
- Yanlin, H.; Zhang, X.; Zhu, L.; Sun, G.; Lou, X.; Dong, M. Optical Fiber Sensor Performance Evaluation in Soft Polyimide Film with Different Thickness Ratios. Sensors 2019, 19, 790. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Zhou, X.; Jiang, H.; Sun, G.; Zhu, L. Polyimide Sensing Layer for Bending Shape Measurement in Soft Surgical Manipulators. Optik 2019, 183, 179–188. [Google Scholar] [CrossRef]
- Nakahara, K.; Narumi, K.; Niiyama, R.; Yoshihiro, K. Electric phase-change actuator with inkjet printed flexible circuit for printable and integrated robot prototyping. In Proceedings of the IEEE International Conference, Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Koivikko, A.; Raei, E.S.; Sariola, V.; Mosallaei, M.; Mantysalo, M. Soft Actuators with Screen Printed Curvature Sensors. In Proceedings of the IEEE Sensors, Glasgow, UK, 29 October–1 November 2017. [Google Scholar]
- Bobrow, J.E.; McDonell, B.W. Modeling, identification, and controlof a pneumatically actuated, force controllable robot. IEEE Trans. Robot. Autom. 1998, 14, 732–742. [Google Scholar] [CrossRef] [Green Version]
- Caldwell, D.G.; Medrano-Cerda, G.A.; Goodwin, M. Control of pneumatic muscle actuators. IEEE Control Syst. Mag. 1995, 15, 40–48. [Google Scholar]
- Li, Y.; Chen, Y.; Ren, T.; Li, Y.; Choi, S.H. Precharged pneumaticsoft actuators and their applications to untethered soft robots. Soft Robot. 2018, 5, 567–575. [Google Scholar] [CrossRef] [PubMed]
- Ni, F.; Henning, A.; Tang, K.; Cai, L. Soft damper for quick stabilizationof soft robotic actuator. In Proceedings of the 2016 IEEE International Conference on Real-time Computing and Robotics, Angkor Wat, Cambodia, 6–10 June 2016; pp. 466–471, ISBN 978-1-4673-8959-4. [Google Scholar]
- Al Abeach, L.A.; Nefti-Meziani, S.; Davis, S. Design of a Variable Stiffness Soft Dexterous Gripper. Soft Robot. 2017, 4, 274–284. [Google Scholar] [CrossRef] [PubMed]
- Ni, F.; Rojas, D.; Tang, K.; Cai, L.; Asfour, T. A jumpingrobot using soft pneumatic actuator. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 3154–3159. [Google Scholar]
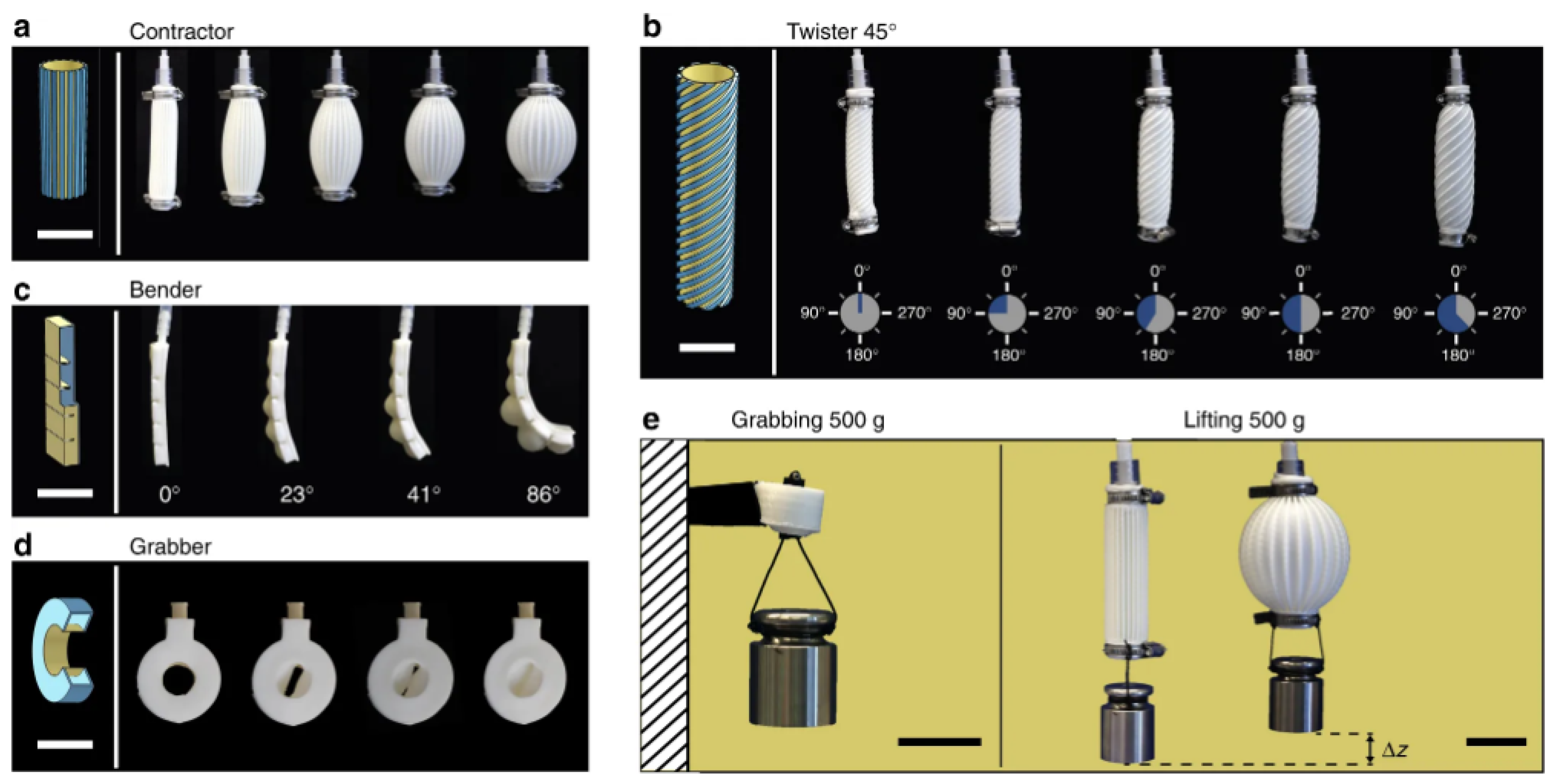
Figure 1.
Various soft robots with various actuation methods (a) Actuator with multi-material 3D printing [11]. (Open Access); (b) Soft linear actuator [12]. (Open Access); (c) Design for bidirectional bending [13]. (Copyright 2015, Elsevier); (d) Snake-modeled robot [14] (Copyright 2012, Taylor & Francis).
Figure 1.
Various soft robots with various actuation methods (a) Actuator with multi-material 3D printing [11]. (Open Access); (b) Soft linear actuator [12]. (Open Access); (c) Design for bidirectional bending [13]. (Copyright 2015, Elsevier); (d) Snake-modeled robot [14] (Copyright 2012, Taylor & Francis).

Figure 2.
Electroactive polymers (EAP) [64] (Copyright 2015, John Wiley & Sons).
Figure 2.
Electroactive polymers (EAP) [64] (Copyright 2015, John Wiley & Sons).

Figure 3.
Electro-adhesive Gripper [64] (Copyright 2015, John Wiley & Sons).
Figure 3.
Electro-adhesive Gripper [64] (Copyright 2015, John Wiley & Sons).

Figure 4.
RBFN-based control configuration for trajectory control of two-link robotic manipulator [59] (Copyright 2016, Springer Nature).
Figure 4.
RBFN-based control configuration for trajectory control of two-link robotic manipulator [59] (Copyright 2016, Springer Nature).

Figure 5.
MSE under RBFN controller action [59] (Copyright 2016, Springer Nature).
Figure 5.
MSE under RBFN controller action [59] (Copyright 2016, Springer Nature).

Figure 6.
Regular proportional-derivative control algorithm diagram for flow-based position control of the robotic bilateral [66] (Copyright 2013, Elsevier).
Figure 6.
Regular proportional-derivative control algorithm diagram for flow-based position control of the robotic bilateral [66] (Copyright 2013, Elsevier).

Figure 7.
Present and future applications of self-healing materials for different wearable devices [97] (Copyright 2017, John Wiley & Sons).
Figure 7.
Present and future applications of self-healing materials for different wearable devices [97] (Copyright 2017, John Wiley & Sons).

Figure 8.
Bi-bellows bending actuator manufactured using silicone rubber (a) is unpressurized, (b) is pressurized [79]. (Copyright 2011, Elsevier.)
Figure 8.
Bi-bellows bending actuator manufactured using silicone rubber (a) is unpressurized, (b) is pressurized [79]. (Copyright 2011, Elsevier.)

Figure 9.
Soft robotic constructed by 3D printing [111] (Open Access).
Figure 9.
Soft robotic constructed by 3D printing [111] (Open Access).

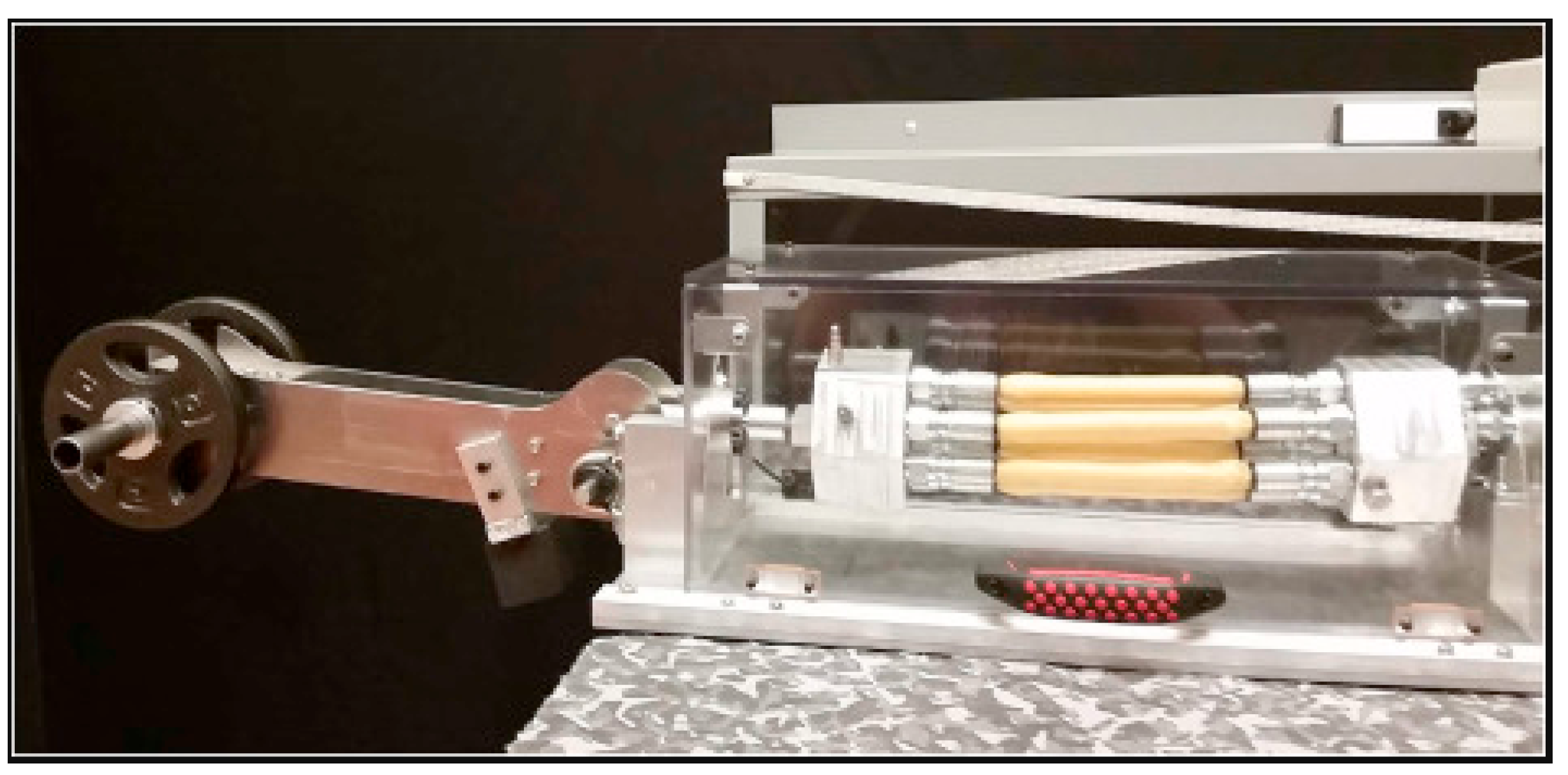
Figure 10.
Example of a rigid-body robot arm using McKibben artificial muscle [122]. (Copyright 2018, Elsevier.)
Figure 10.
Example of a rigid-body robot arm using McKibben artificial muscle [122]. (Copyright 2018, Elsevier.)

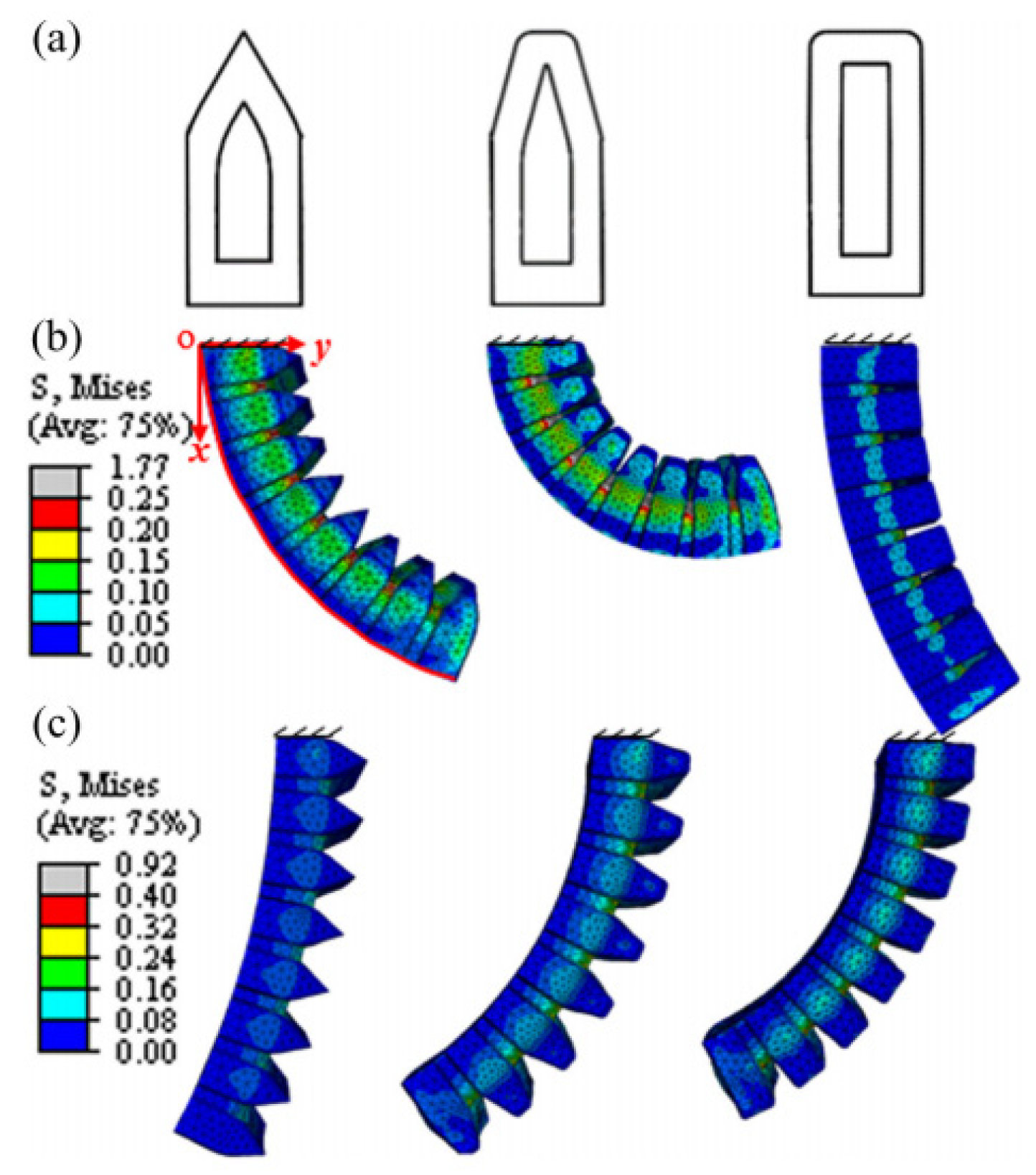
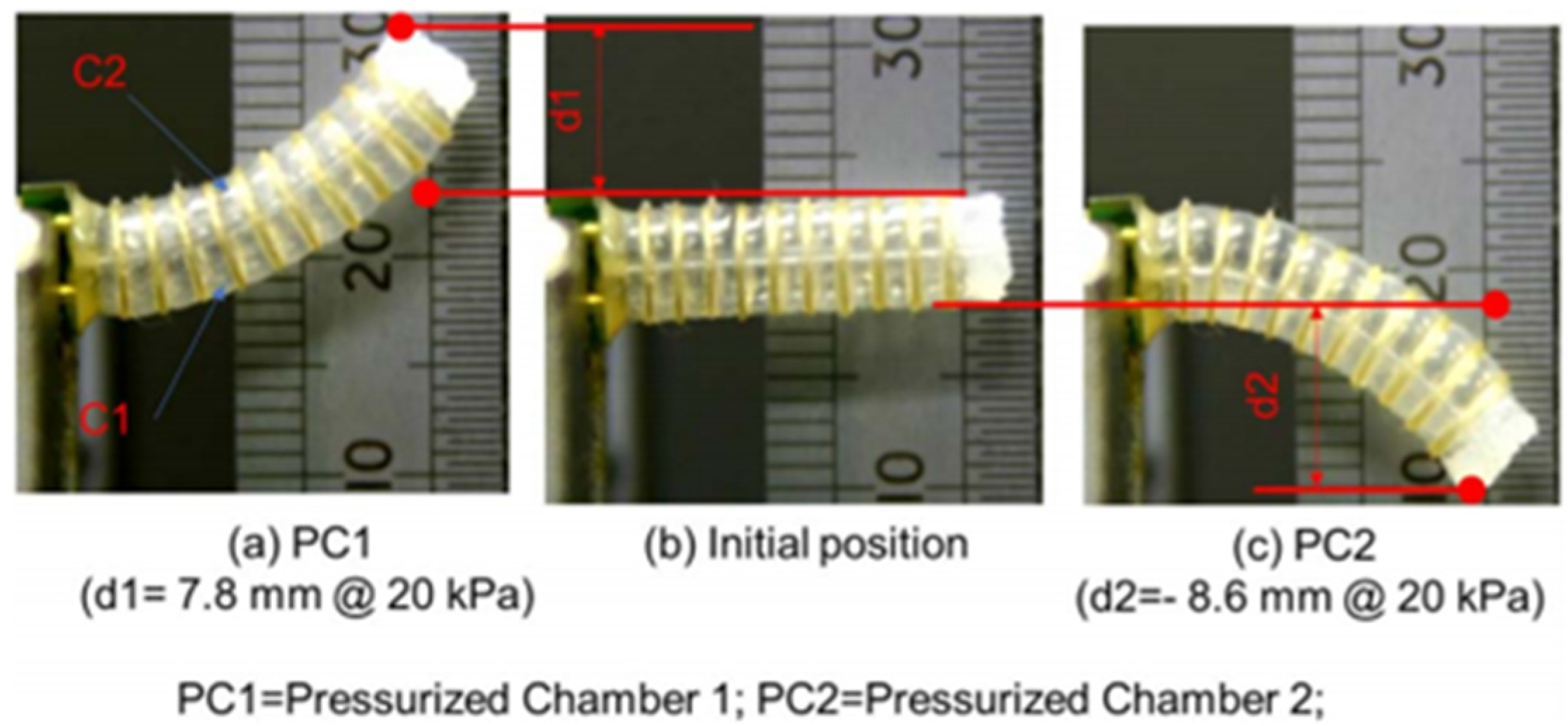
Figure 11.
FEA model of a soft robotic actuator compared to experiment [123]. (a) Schematic of the chamber shape, (b) The maximum bending angles of the three actuators when deflated, (c) The FEA results of the three actuators at pressurization state (20 kPa). (Open Access).
Figure 11.
FEA model of a soft robotic actuator compared to experiment [123]. (a) Schematic of the chamber shape, (b) The maximum bending angles of the three actuators when deflated, (c) The FEA results of the three actuators at pressurization state (20 kPa). (Open Access).

Figure 12.
Example of ECF actuator at different pressures [77]. (Open Access).
Figure 12.
Example of ECF actuator at different pressures [77]. (Open Access).

Figure 13.
Comparisons of different models to experimental design of reverse pneumatic artificial muscles (rPAMs) [12] (Open Access).
Figure 13.
Comparisons of different models to experimental design of reverse pneumatic artificial muscles (rPAMs) [12] (Open Access).

Figure 14.
CAD model (Left) compared to prototype of a reverse pneumatic artificial muscle (rPAM) [12] (Open Access).
Figure 14.
CAD model (Left) compared to prototype of a reverse pneumatic artificial muscle (rPAM) [12] (Open Access).

Figure 15.
Experimental set-up of a reverse pneumatic artificial muscle (rPAM) [12] (Open Access).
Figure 15.
Experimental set-up of a reverse pneumatic artificial muscle (rPAM) [12] (Open Access).

Figure 16.
Different views of a liquid metal embedded elastomer curvature sensor. (A) An overview of the sensor, (B) a close-up of the liquid metal filled channels in the sensor, (C) the sensor is able to flex and stretch without breaking [136] (Open Access).
Figure 16.
Different views of a liquid metal embedded elastomer curvature sensor. (A) An overview of the sensor, (B) a close-up of the liquid metal filled channels in the sensor, (C) the sensor is able to flex and stretch without breaking [136] (Open Access).

Figure 17.
The construction stack of liquid metal embedded elastomer curvature sensor [136] (Open Access).
Figure 17.
The construction stack of liquid metal embedded elastomer curvature sensor [136] (Open Access).

Figure 18.
A tactile sensor using a magnet and three axis Hall Effect sensor. In this case, the soft sensor is incorporated into an existing hard robot to interface with delicate objects [139]. Hybrid Robots such as the above and [78,138] offer exciting opportunities for innovation (Open Access).

Figure 19.
The function of a hall effect sensor in an EMS (A), the distance between the magnet and hall effect sensor in the curvature sensor presented by Ozel et al. (B), and the data correlating the accuracy of the models to the curvature sensor design (C) [137] (Open Access).
Figure 19.
The function of a hall effect sensor in an EMS (A), the distance between the magnet and hall effect sensor in the curvature sensor presented by Ozel et al. (B), and the data correlating the accuracy of the models to the curvature sensor design (C) [137] (Open Access).

Figure 20.
The effect of pressure on a semi-conductive matrix [140] (Open Access).
Figure 20.
The effect of pressure on a semi-conductive matrix [140] (Open Access).

Figure 21.
3D multi material prints can be leveraged to create embedded sensors within soft robotic actuators capable of holding many different objects (A–E), 3D perspective of the scatter plot (F) and 2D perspective of the scatter plot (G) [11]. Another similar project was completed in 2015 by Homberg et al. [143] and again in 2019 by Truby et al. [144] (Open Access).
Figure 21.
3D multi material prints can be leveraged to create embedded sensors within soft robotic actuators capable of holding many different objects (A–E), 3D perspective of the scatter plot (F) and 2D perspective of the scatter plot (G) [11]. Another similar project was completed in 2015 by Homberg et al. [143] and again in 2019 by Truby et al. [144] (Open Access).

Figure 22.
The relationship between resistance and carbon black in a silicone contact sensor. Greater concentrations of Carbon Black, a semi-conductive silicone rubber additive, result in lower resistivity, and therefore more sensitivity, but also more sensor noise [140] (Open Access).
Figure 22.
The relationship between resistance and carbon black in a silicone contact sensor. Greater concentrations of Carbon Black, a semi-conductive silicone rubber additive, result in lower resistivity, and therefore more sensitivity, but also more sensor noise [140] (Open Access).

Figure 23.
TacTip endoscopic visual contact sensor [28] (Open Access).
Figure 23.
TacTip endoscopic visual contact sensor [28] (Open Access).

Figure 24.
A pneumatic soft actuator employing a FBG curvature sensor to measure the deformation of the soft actuator [145] (Open Access).
Figure 24.
A pneumatic soft actuator employing a FBG curvature sensor to measure the deformation of the soft actuator [145] (Open Access).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison of different control systems.
| Driving Systems | Controller | Advantage | Disadvantage |
|---|---|---|---|
| Cables and Servos | RBFN [59] Radial basis function network |
|
|
| Disturbance Observer (Dob) [67] |
|
| |
| MLFFNN [59] Multilayer Feed-forward Neural Network |
|
| |
| PD (Proportional-Derivative) [68,69,70] |
|
| |
| PID [35,67] Proportional-Integral-Derivative |
|
| |
| Electromagnetic & Electroactive polymers (EAP) | Microcontrollers [61] |
|
|
| Pressure Sensor | PI [71] Proportional-Integral |
|
|
| Linear [72,73] |
|
| |
| None (Theoretical Model) | Extended Kalman Filter [74] |
|
|
Table 2.
Summary of Different Components of Testing for Soft Robotic Materials.
| Material | Purpose/Functionality | Characteristic |
|---|---|---|
| Silicon Rubber [75,76,77,78,79,80,81,82,83,84] | Pneumatic Flexible Finger Tube; Robot leg and gripper; Bi-bellows actuator; Buckling Linear Actuators | Chamber; Bidirectional motion Locomotive and manipulative role; Ecoflex-50; Elastosil |
| Sheet Material [85] | Pouch Motor | Mass-fabricable; heat bonding; |
| 3D printing materials (NinjaFlex, EP, Nylon 12, and EAA & AUD) [23,24,25,26,89,90,91] | Soft pneumatic actuator; Flexible fluidic actuator | Various 3D printing method type (FDM; DMP-SL; SLS; DLP); High degree of freedom |
| Polychloroprene-based membrane [93,94] | Single mass granular material gripper | Hold the object without sensory feedback |
| PDMS [95] | Microscale inward spiraling tentacle actuators | ~185 μm radius, ~0.78 mN grabbing force |
| PGSI [98] | Environment friendly and biodegradable polymers | 134 to 193 kPa UTS; 57 to 131 kPa moduli; |
| Smart material (Nitinol, PCL, Field’s metal) [99] | Smart composite finger | Discrete levels of stiffness |
| DN Hydrogels; Agrar/PAM [105,106] | Bending actuator | 3-DOF; easily customizable; delicate in small millimeter scale; biocompatible |
| Electro Active Polymer [31] | OCTARM (artificial manipulator) | PVDF based and dielectric |
| Diels-Alder Polymer [107] | Self-healing elastomers | Thermo-reversible covalent network; heal micro and macroscopic damage |
| Open-celled elastomeric foam [108] | Fluidic elastomer actuators | Low density; |
Table 3.
Summary comparing different soft robotic technologies.
| Technology | Modeling Method | Gripper size (mm) | Object Mass (g) | Supplied Power | Force (N) | Surface Conditions (Dry, Wet) |
|---|---|---|---|---|---|---|
| Tendon-Based Stiffening [2] | Beam Theory (Mathematical Model) | 47 × 23 | No Object | N/A | 3.3 | Dry |
| Twisted-and-Coiled Actuator [3] | Physics-Based | N/A | 1, 2 and 3 | N/A | 0.013 | Dry |
| Pneumatic Finger [27] | ANSYS | 67 × 3.2 | 15.3 | 12V | 0.15 | Dry |
| SMA Coils [128] | Physics-Based Kinematics | 80 × 55 | N/A | 0-5V | N/A | Both |
| ECF (electro-conjugate fluid) [77] | Physics-Based | 18 × 5 | No Object | .5kV-4kV | 0.007 | Dry |
Table 4.
Summary of Different Soft Sensor Mechanisms and Materials.
| Transducer Mechanism | Material | Functionality | Characteristic | Performance |
|---|---|---|---|---|
| Resistive sensors | Liquid metal [136] | Strain, Curvature | Laser engraved microchannel, Flexible system | Linearity and low coupling between summation and differential channels in response to strain and curvature. |
| Conductive Hydrogel [141] | Touch location stretch | Location of touch points are determined by its polar radius | Conductive Hydrogel has tensile elastic modulus of 1.335 kPa; Gel resistance increases with stretching. | |
| Photopolymers (Tango+, Tangoblack+, VeroClear, SUP705) [11] | Strain | 3D–printed, Multimaterial with various conductivities | – | |
| Piezoresistive sensors | Composite (TPU & PLA–G) [110] | Tactile | 3D–printed (FDM), high sensitivity, excellent recovery to bending strain, wide range of pressure detecting | Detectable pressure Range: 292 Pa to 487 kPa Bending angle range: 0.1 °–26.3° |
| Composite (Carbon black) [140] | Elastomeric force | Controllable composite film thickness | Response rise time upon applied load: 600 ms | |
| Magnetic | Hall sensors and permanent magnets [137] | Curvature | Contract–free | Sensitivity with noise filtering: 0.0012 cm−1 Sensitivity without noise filtering: 0.05 cm−1 |
| Hall sensors and permanent magnets [138] | Tactile | High sensitivity, low hysteresis, good repeatability, Easy fabrication | Minimum Sensed force: 7.2 mN; Recovery time: 0.3 s; Noise level: ± 2.5 mN | |
| Optical | Photopolymer (TangoBlack+) [28] | Tactile | 3D printed, Biomimetic Morphology, High accuracy | Sensor Localization accuracy average: ± 0.205 |
| FBG, Polyimide film [145] | Curvature | Reliable sensitivity, good repeatability | Range of sensitivity of the sensor: 1.96 to 50.65 pm/m−1 The curvature ranges up to 30 m−1 | |
| FBG, Polyimide film [146] | Curvature | Flexible system | Range of sensitivity of the sensor: 9.73 to 212.8 pm/m−1 Sensor error average: 1.82% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. https://0-doi-org.brum.beds.ac.uk/10.3390/act9010003
AMA Style
Walker J, Zidek T, Harbel C, Yoon S, Strickland FS, Kumar S, Shin M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators. 2020; 9(1):3. https://0-doi-org.brum.beds.ac.uk/10.3390/act9010003
Chicago/Turabian StyleWalker, James, Thomas Zidek, Cory Harbel, Sanghyun Yoon, F. Sterling Strickland, Srinivas Kumar, and Minchul Shin. 2020. "Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators" Actuators 9, no. 1: 3. https://0-doi-org.brum.beds.ac.uk/10.3390/act9010003
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.