1. Introduction
Aero-engine is an aerothermodynamic system with a complicated structure and strong nonlinearity. It works in harsh environments with high temperatures, high pressures and high rotating speeds for extended periods of time, which results into the inevitable degradation of components. Once the performance failure and abrupt malfunction occur in the power plant of the flight vehicle, it causes substantial economic losses and has a high probability of initiating catastrophic accidents [
1]. Therefore, an effective maintenance is essential to maintain a high level of availability and reliability of aero-engines. With the development of engine health monitoring technologies, gas path fault diagnosis of a component or a system has become an aera of interest in the field of flight propulsion researches [
2].
Aero-engine gas path fault diagnosis can be divided into three categories: model-based approach, data-driven approach, and information fusion approach [
3], wherein model-based diagnostic method is a practical tool with respect to on-board implementation considerations and low model complexity. The method depends on the thermodynamic model of the aero-engine, and the modeling accuracy directly determines the diagnostic effectiveness. Consequently, an accurate mathematical model plays a vital role in the successful gas path diagnosis.
Various adaptation techniques have been employed for the goal mentioned above. Data-based adaptation methods such as neural networks [
4,
5] or function fitting [
6,
7] are frequently applied to the generation of the engine component performance maps. However, these methods require large amounts of experimental data that have limited availability due to proprietary issues and liability. Another more commonly used method involves scaling and shifting the shape of reference component maps to best match the engine model and target measurement. Stamatis et al. defined a set of scaling factors to modify the component maps iteratively to increase the performance model accuracy [
8]. From this foundation, Kong et al. distinguished operating conditions between the design point (DP) and off-design (OD) points for independent modification based on system identification [
9]. To avoid blindness in the adaptation process, optimization algorithms have been implemented extensively for the fittest solution among all potential solutions. Kong et al. used a genetic algorithm (GA) to obtain more accurate component maps from experimental data [
10]. Li et al. introduced quadratic function representing nonlinear scaling factors to produce modifications for different speed lines using GA [
11]. Tsoutsanis et al. considered rotation of the ellipses and transformation of its coordinates, where the shape of a compressor map was expressed by the mathematical equations of an ellipse with a fixed center and no rotation [
12]. The Nelder–Mead algorithm was implemented to ensure the minimum of the objective function [
13]. Nevertheless, the advantages and benefits of the above approaches for performance adaptation are extensive. It is hard to trade off key parameters such as accuracy, local optimum, and computational time.
The performance diagnosis of the aero-engine is a more challenging task with deep-rooted and underlying problems, and it provides crucial support for the engine security, reliability and economy. With the help of an accurate engine model, abundant technologies relevant to model-based diagnosis are studied. Urban first introduced a gas path analysis (GPA) method for a linear approximation at a certain operating point, and it can detect different fault modes with a small quantity of fault coefficients [
14]. Multiple diagnostic systems based on GPA have been developed so far, such as TEMPER [
15] and MAPNET [
16]. In addition, Bai introduced a robust state estimation method with the internal searching optimized by GA [
17]. Brotherton et al. introduced a diagnostic method for the subset of the health parameters against multicollinearity [
18].
In recent decades, the Kalman filter (KF) has attracted much attention due to its easy implementation and optimal estimation performance under a Gaussian white noise environment. Linear KF (LKF) was used by Simon for gas path fault estimation with constraints such as linear inequalities [
19] and density functions [
20] to improve accuracy and stability. Nonlinear KFs, an extension of KF, developed rapidly in the application of the nonlinear system. Several forms such as Extended KF (EKF) [
21], Unscented KF (UKF) [
22] and Cubature KF (CKF) [
23], had better state estimation accuracy for gas turbine engines when compared to LKF [
24,
25,
26,
27]. Kobayashi used EKF for the performance parameter estimation on a turbofan engine [
28]. Dewallef studied online performance monitoring and diagnostic technologies based on UKF [
29]. Yang et al. proposed a hybrid KF to improve the fault detection and isolation rates [
30]. These previous works mainly focus on detecting gas path fault depending on the statistical properties of parameter variations. In practical engineering, the linearization of a strong nonlinear system cannot always approximate the nonlinearity characteristic of the state equation, leading to the accumulation of estimated errors even divergence with the flight cycles. The lack of critical sensor information generates the diagnostic unreliability. Meanwhile, the nature and quantity of the health parameters calculated at different sampling points may also change due to the change of engine nonlinear features in the transient operating process. These primary problems are the core elements generating high misdiagnosis incidences.
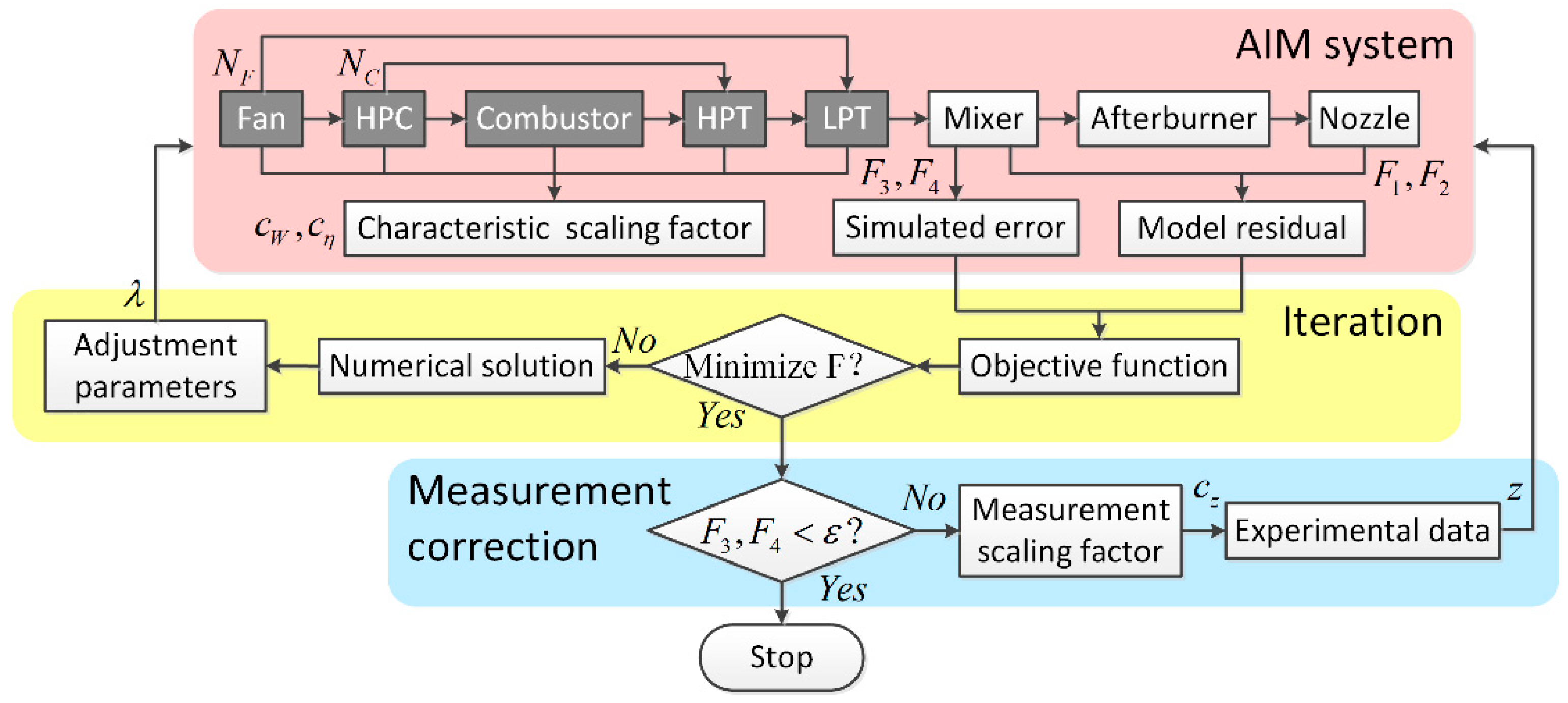
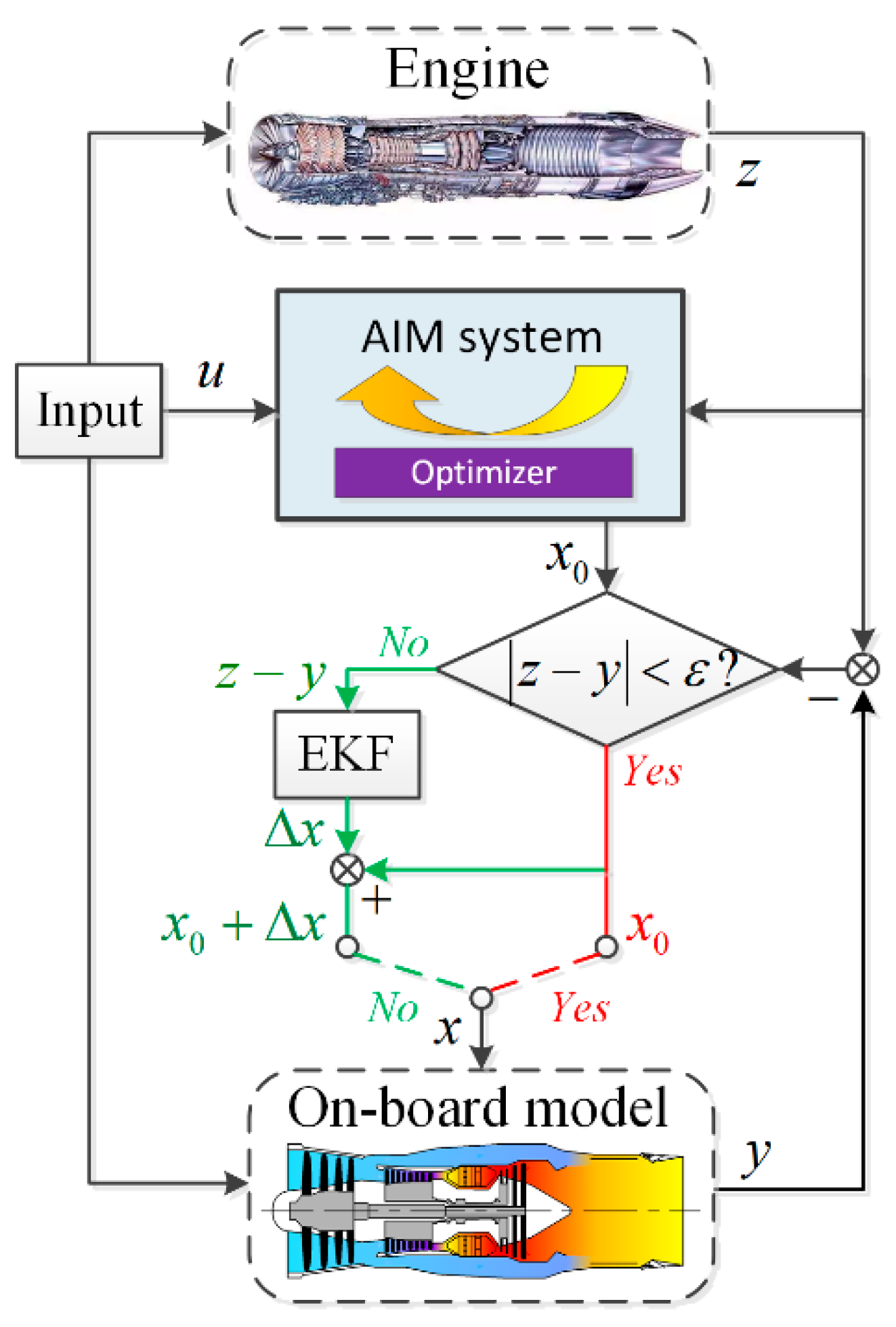
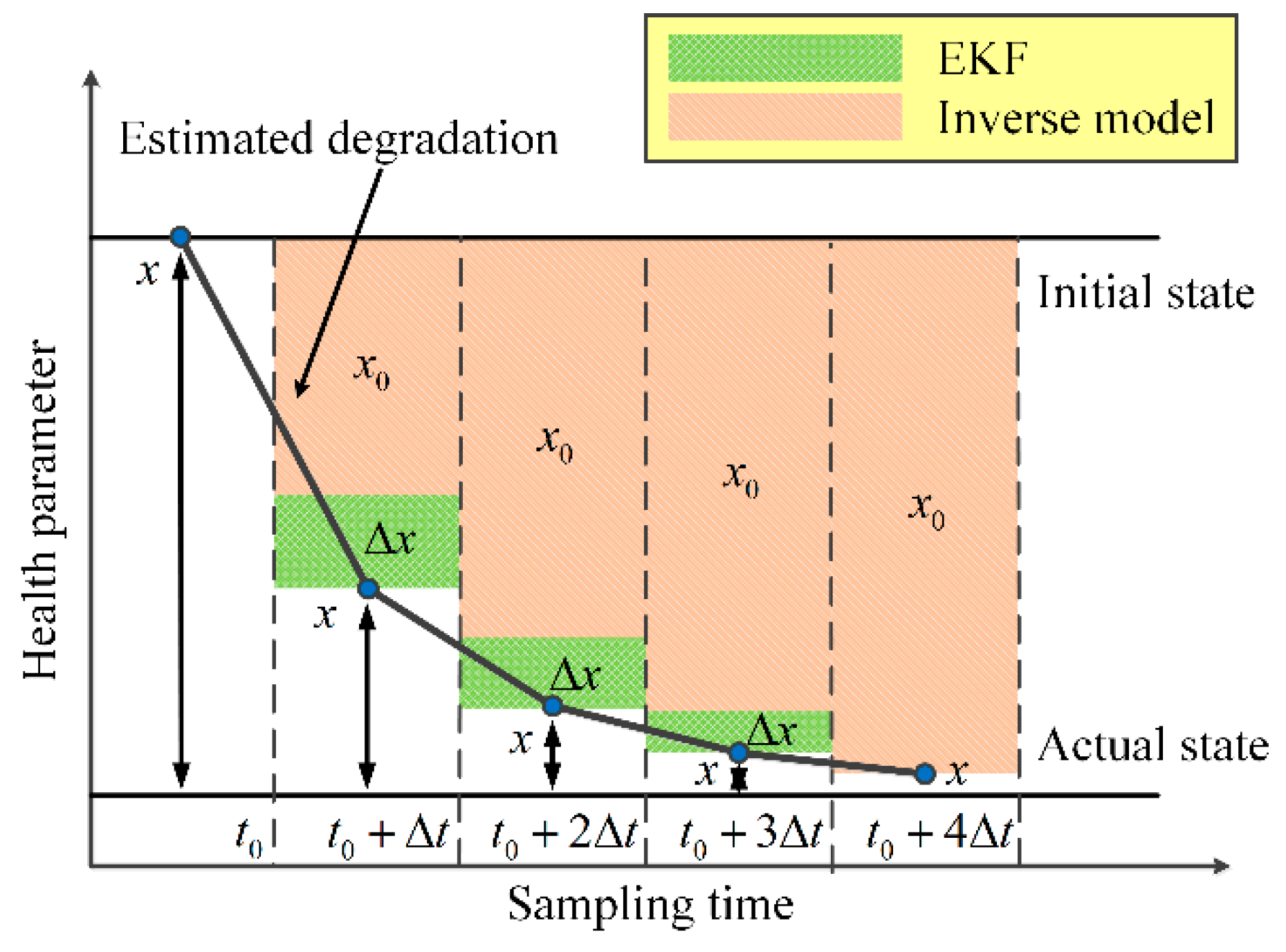
To address this dilemma, the main contribution of this paper proposes a novel method with the capacity to refine model adaptation and performance diagnosis, and it is then integrated into a thermodynamic model of turbofan engine in the development stage. The component aerothermodynamic inverse model (AIM) is established to iteratively calculate measurement and characteristic scaling factors based on multiple experimental data to improve performance prediction accuracy. Besides, due to measurement restrictions, AIM can also be applied to gas path fault diagnostic with the assumption of estimated dimensionality reduction for unbiased estimation. Seven health parameters can be obtained, and compensation is provided using EKF according to the measurement residuals to achieve the real-time diagnosis under transient conditions. The advantages of the proposed method are that the modification achieves high-performance accuracy and low computational cost, which can avoid trapping into local optimum like conventional optimization algorithms. The sensor information also can be utilized adequately for unbiased estimation with fast convergence in fault diagnosis in this method.
This paper is organized as follows:
Section 2 introduces the establishment of component AIMs to calculate scaling factors considering measurement correction for model adaptation;
Section 3 gives an introduction of computation of health parameters with the compensation of EKF; a set of simulation cases are conducted in
Section 4 to test the quality of the proposed performance adaptation and diagnostic method, and
Section 5 presents a summary of the research.
5. Conclusions
For aero-engine performance diagnosis, there are two major challenges that are difficult to be addressed. The first is that the inaccuracy on-board model causes the accumulation of estimated errors. The second is the lack of critical sensor information generates the divergence of diagnostic approaches.
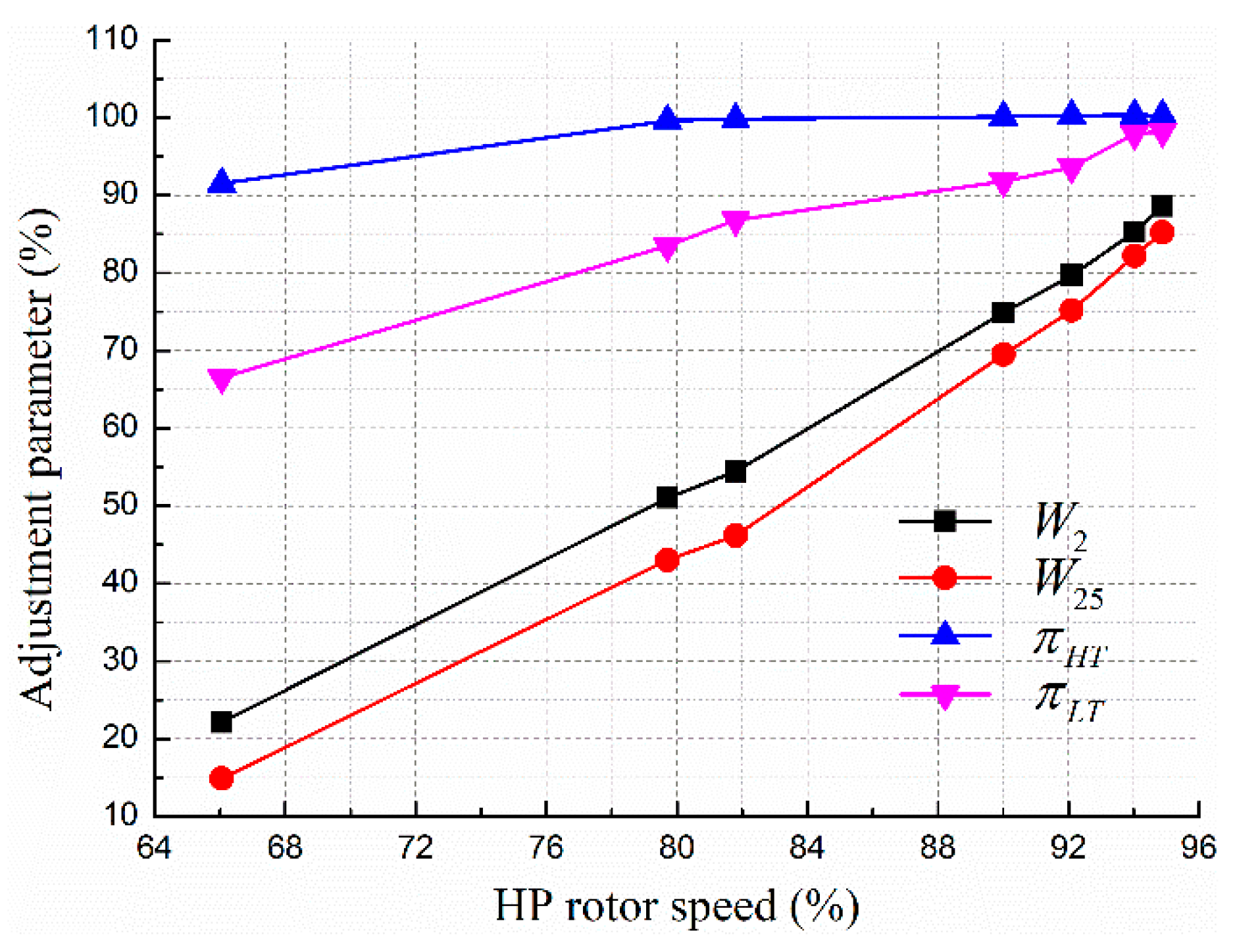
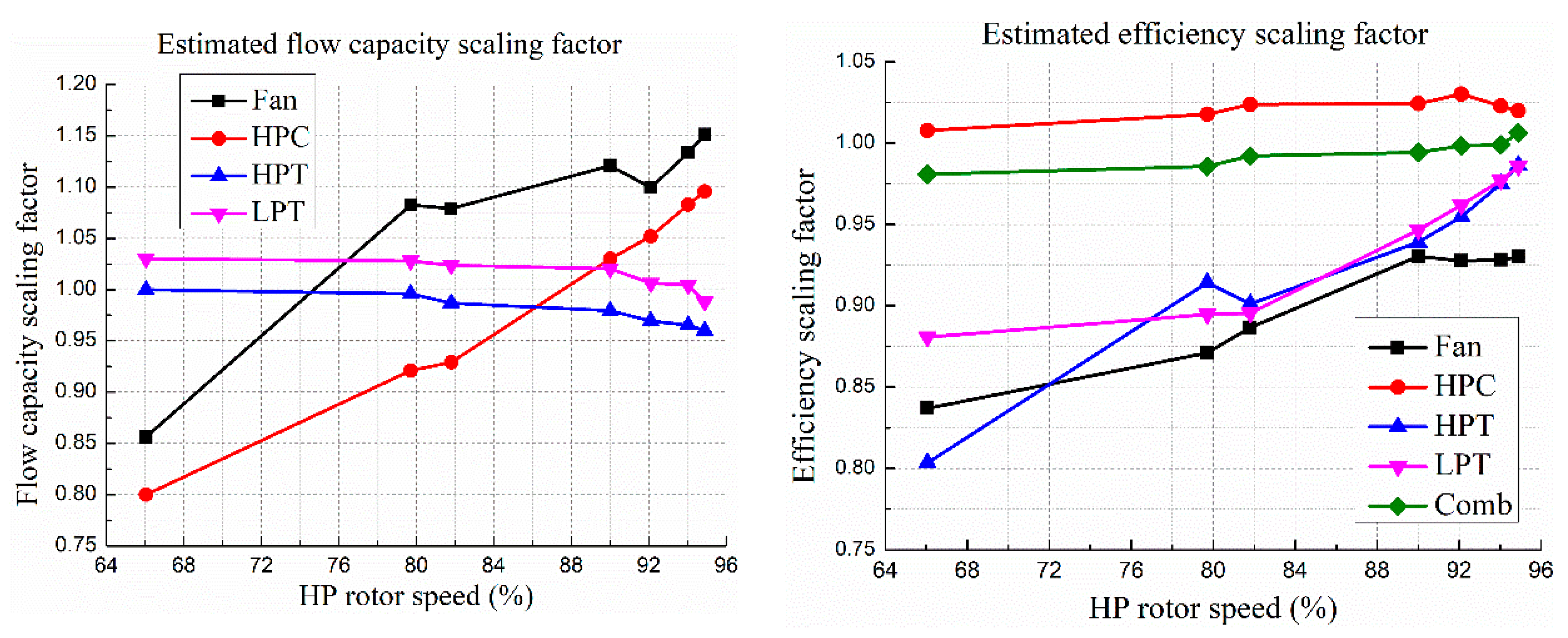
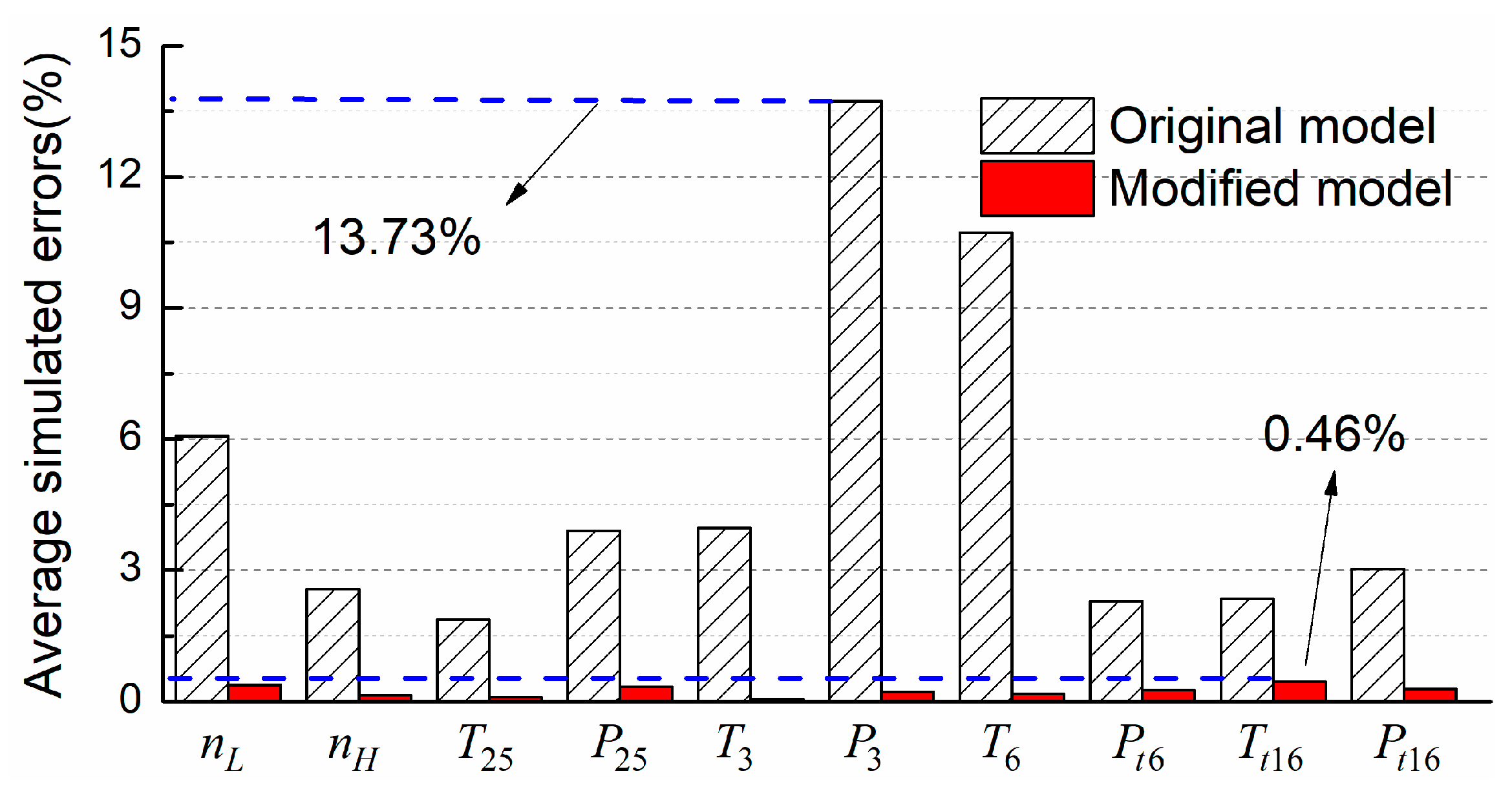
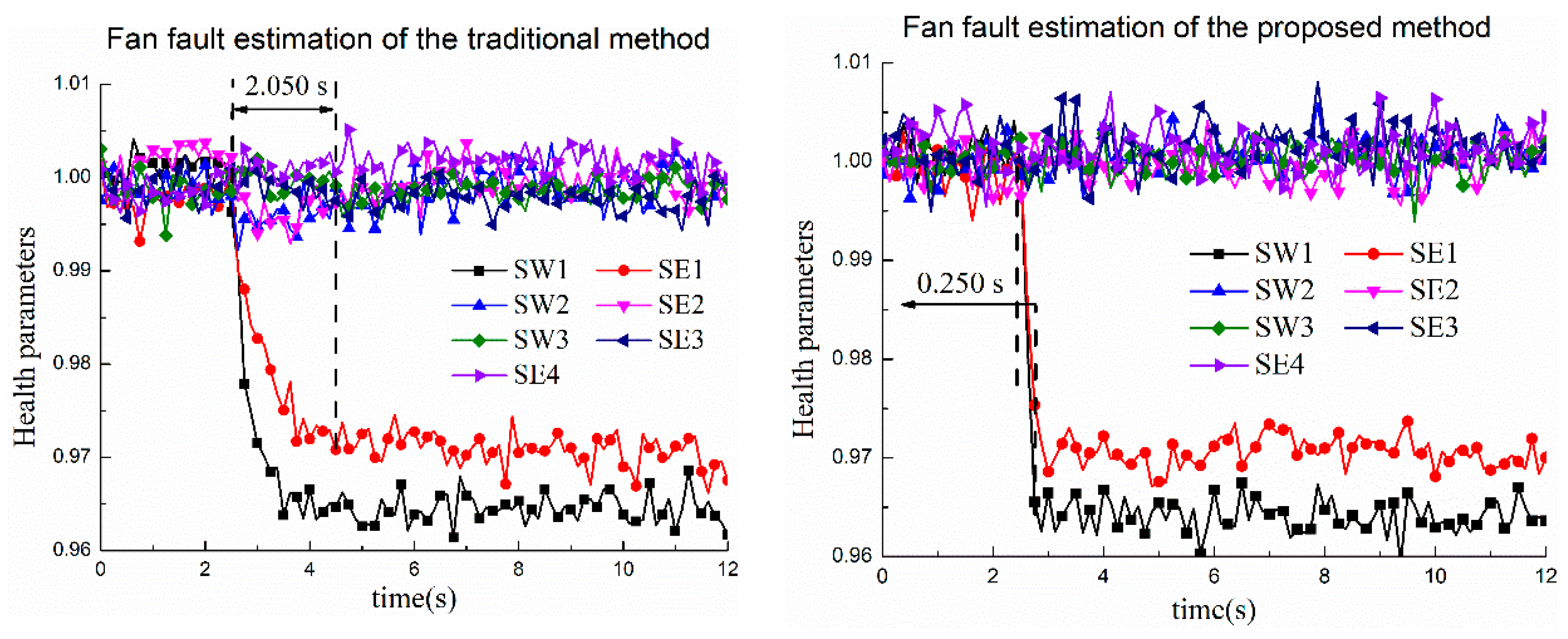
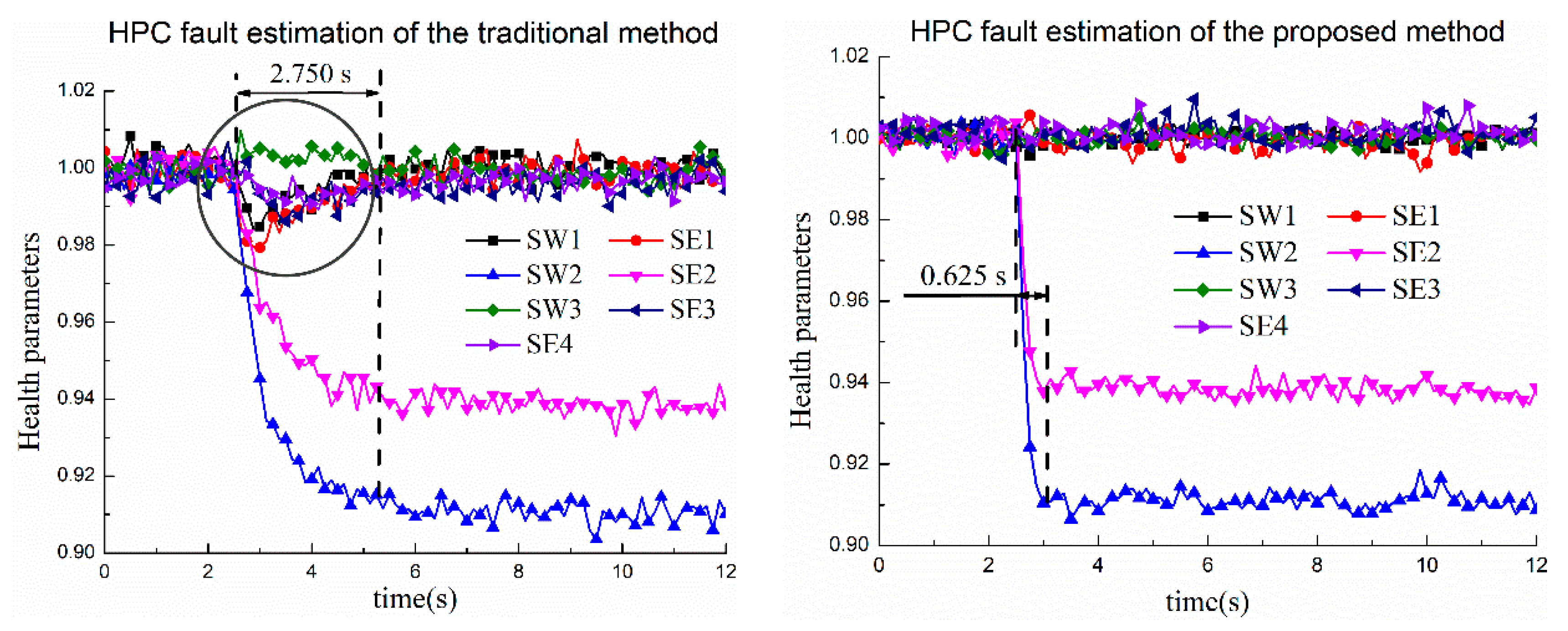
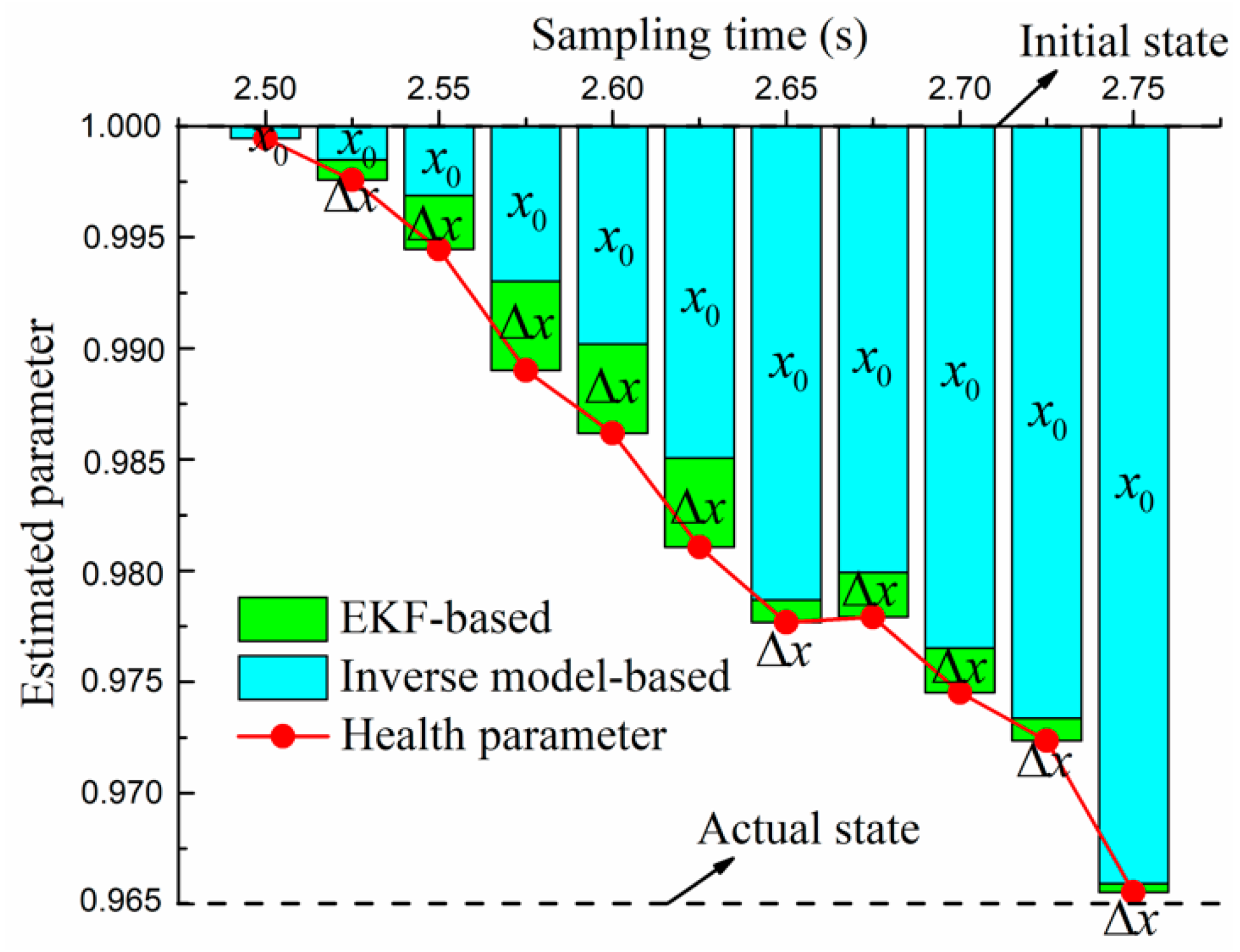
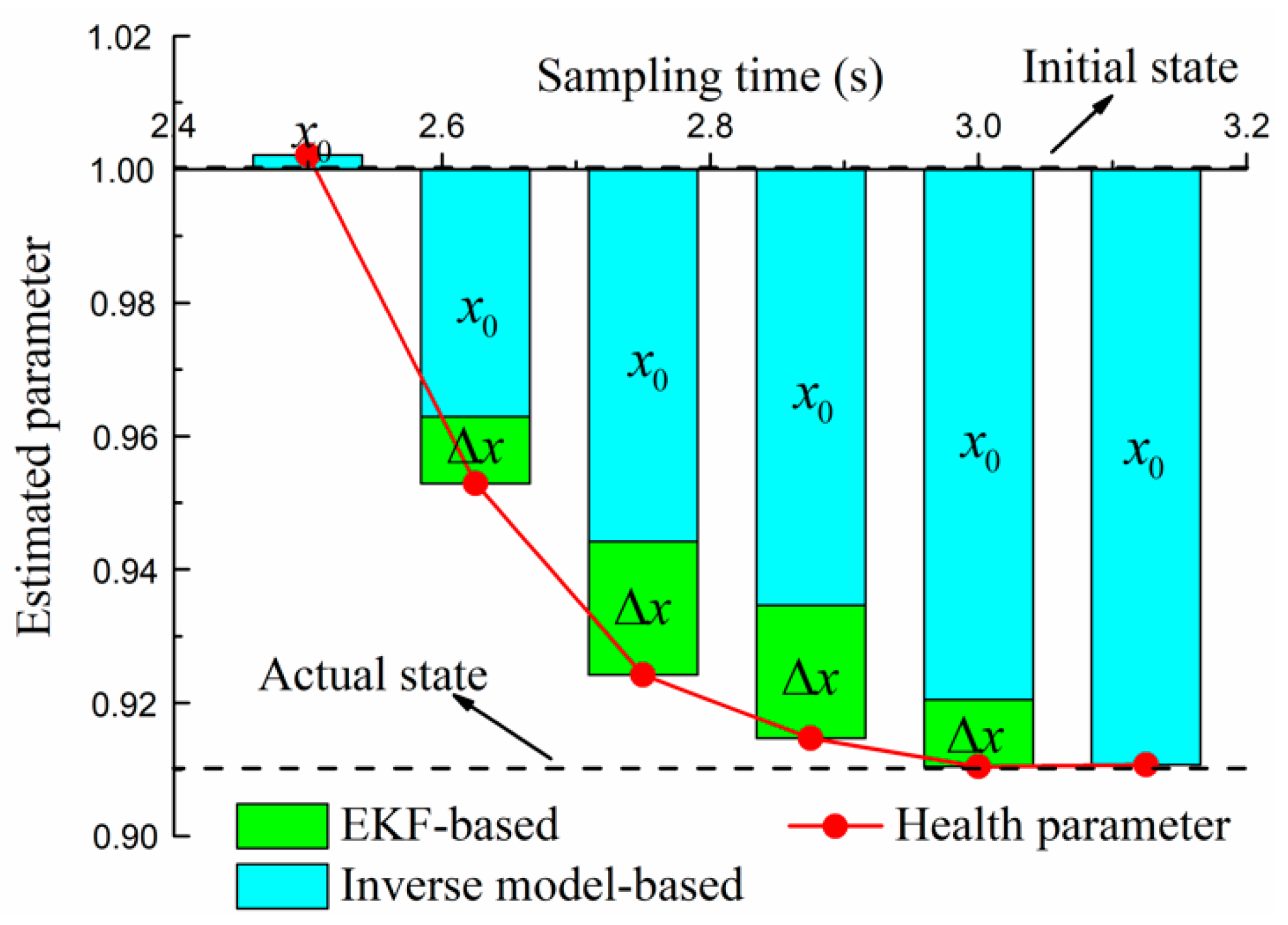
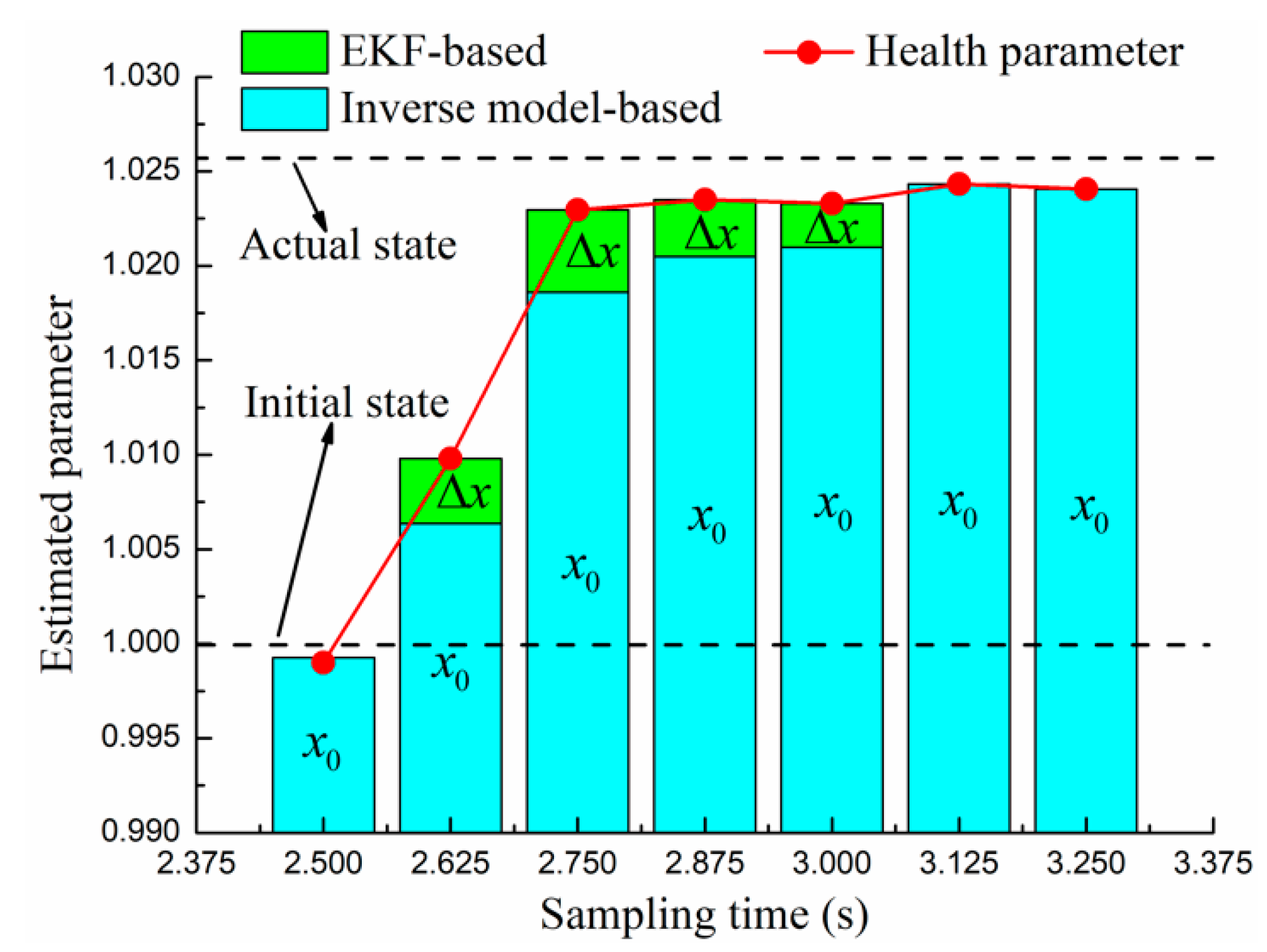
The quest to solve above problems is divided into two steps. The first step develops a new model adaptation method with respect to the twin-spool turbofan engine, which aims to improve the accuracy of the on-board engine model under steady-state conditions. AIMs of components are established to calculate the characteristic scaling factors. Considering the measurement correction, adjustment parameters are solved iteratively through the numerical solution for the engine aerodynamic matching and the accuracy improvement. The second step is an extension of the application of AIM on the performance diagnosis. The estimation dimensionality is reduced for unbiased estimation due to missing sensors between the HPT and the LPT. The theory of the rotor dynamics and modifications are integrated into the model adaptation system for the real-time gas path fault diagnosis under transient conditions. Based on the health parameters estimated from AIM, an auxiliary strategy is designed where the EKF is used for the estimation compensation to minimize the measurement residuals. With this in hand, a novel performance adaptation and diagnostic method for aero-engines based on AIM is proposed.
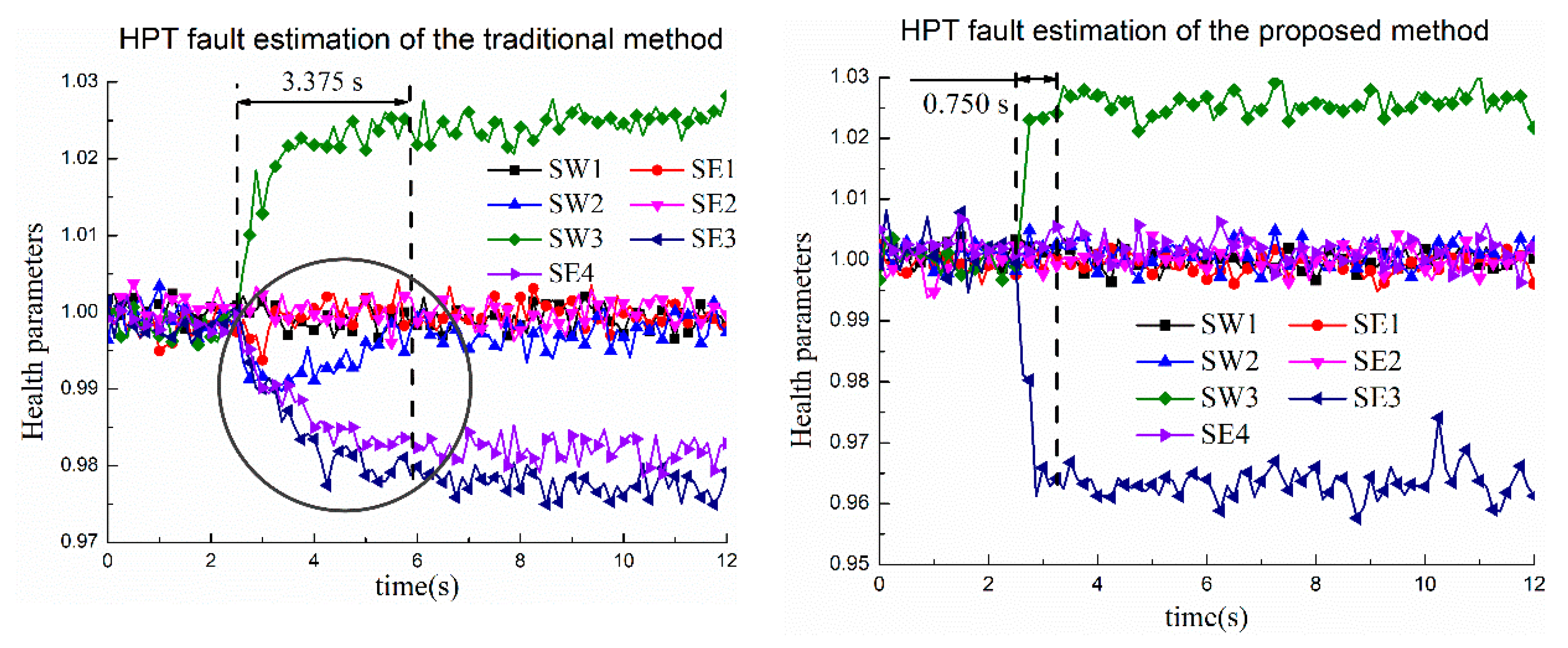
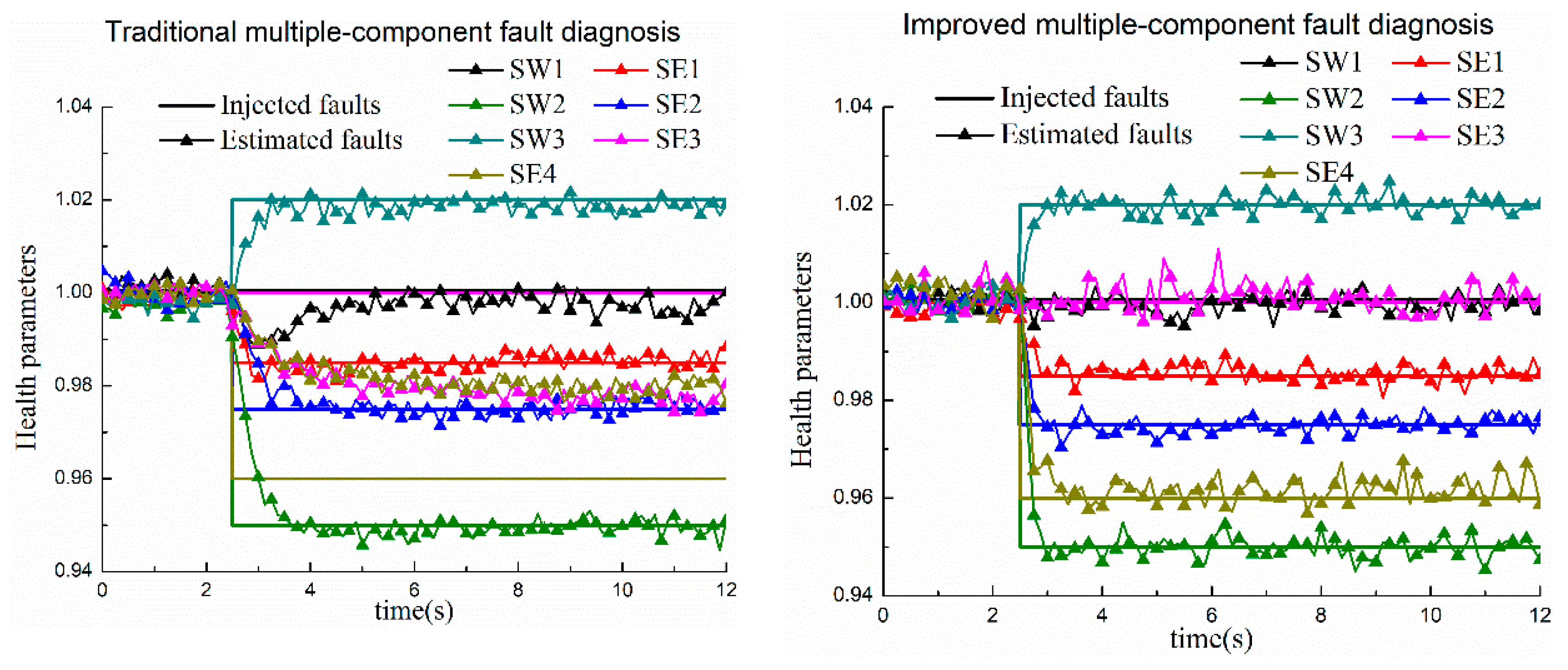
A series of simulation cases demonstrate that scaling factors can be obtained to modify the engine model to match the experimental data in the model adaptation system. In addition, under the circumstances of the single-component and multiple-component abrupt malfunction, the proposed method can achieve an unbiased estimation with fast convergence and significant accuracy improvement compared against the traditional EKF-based diagnostic method. The tests demonstrate that the proposed method exhibits the effective capacity of adaptation and diagnosis for aero-engines.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}