
Behavior Classification and Analysis of Grazing Sheep on Pasture with Different Sward Surface Heights Using Machine Learning

 , , ,
, , ,
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
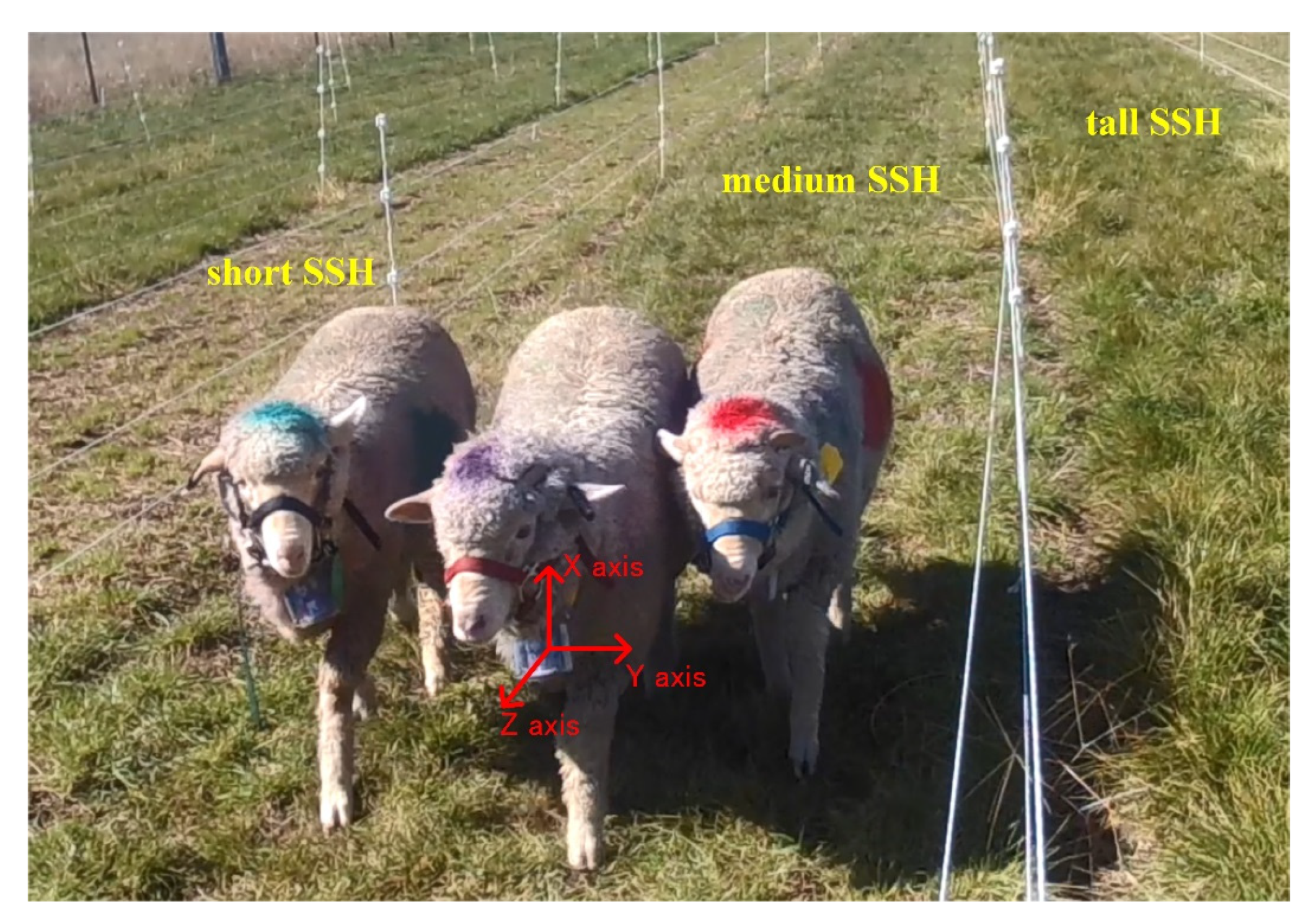
2.1. Experimental Site, Animals, and Instrumentation
2.2. Sheep Behavior Definition and Labelling
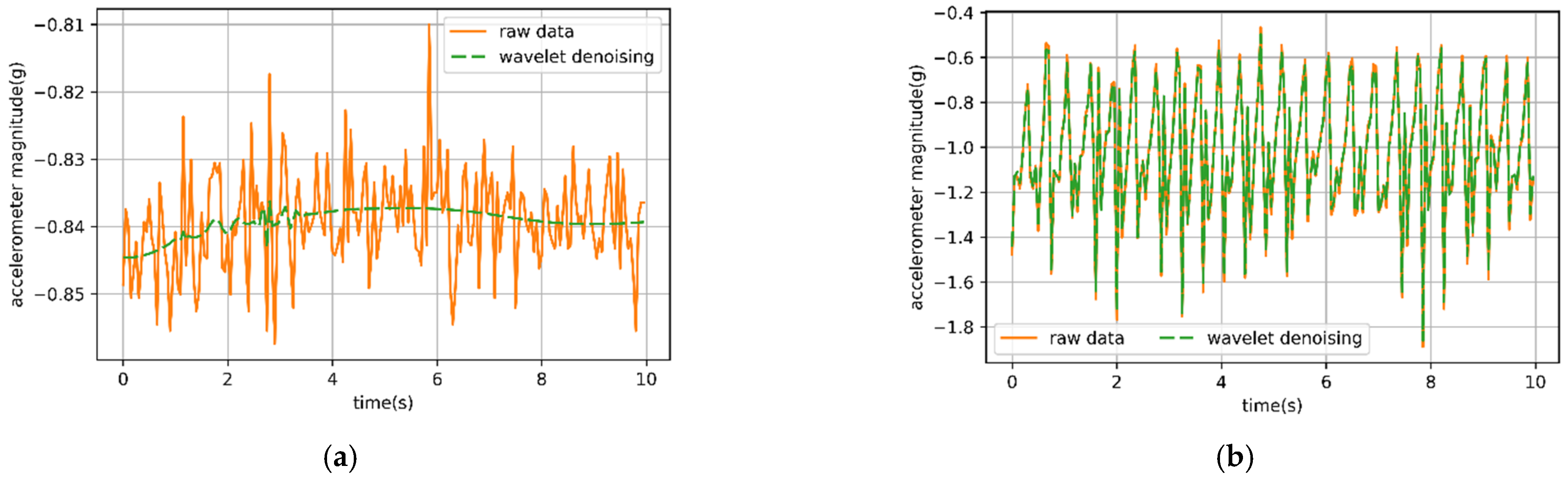
2.3. Wavelet Transform Denoising
2.4. Time Window Size Selection
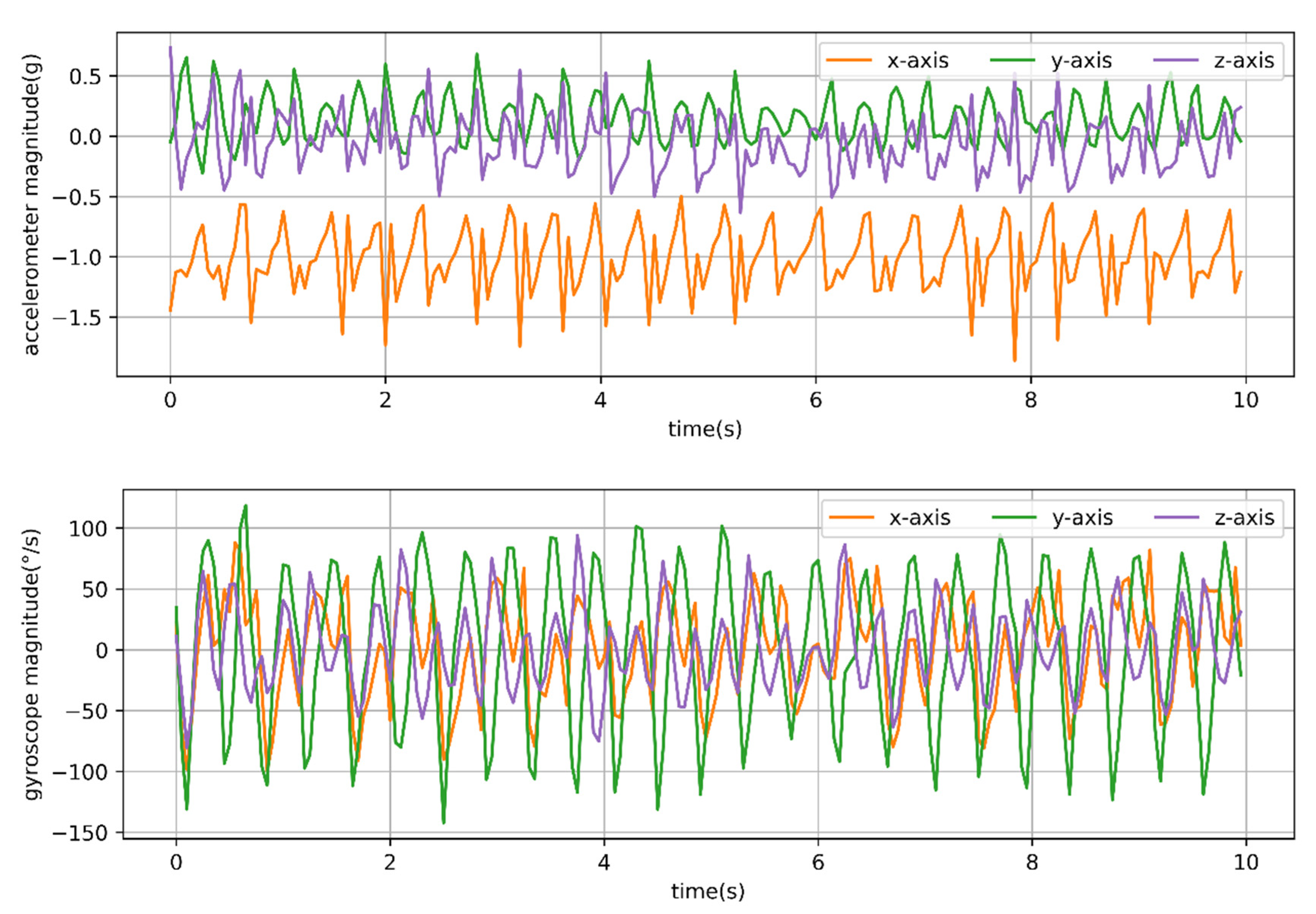
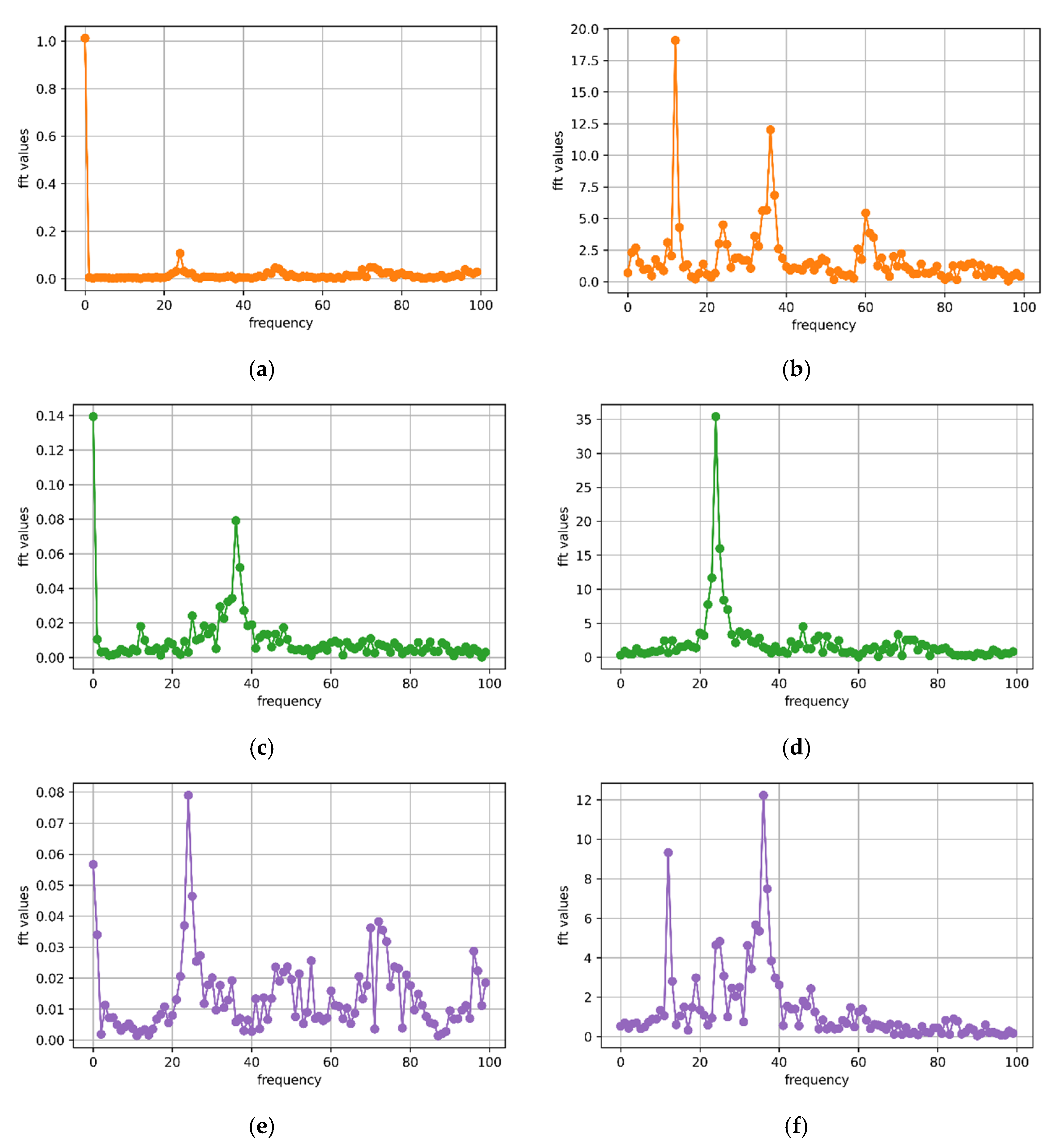
2.5. Classification Feature Construction
2.6. ML Classification Algorithms
2.7. Performance of the Classification
3. Results
3.1. Model Training and Test Results
3.2. Practical Application of the Trained Models
3.3. Behavior Classification of Three Grazing Sheep on Pasture with Three Different SSH
4. Discussion
4.1. Time Window Size and Sensor Type
4.2. Sheep Behavior Classification Algorithm
4.3. Behavior Classification of Grazing Sheep on Pasture with Different SSH
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Van Wettere, W.H.E.J.; Kind, K.L.; Gatford, K.L.; Swinbourne, A.M.; Leu, S.T.; Hayman, P.T.; Kelly, J.M.; Weaver, A.C.; Kleemann, D.O.; Walker, S.K. Review of the impact of heat stress on reproductive performance of sheep. J. Anim. Sci. Biotechnol. 2021, 12, 859–876. [Google Scholar] [CrossRef]
- Roger, P.A. The impact of disease and disease prevention on welfare in sheep. In The Welfare of Sheep; Cathy, M.D., Ed.; Springer: Dordrecht, The Netherlands, 2008; Volume 6, pp. 159–212. [Google Scholar] [CrossRef]
- Fogarty, E.S.; Swain, D.L.; Cronin, G.M.; Moraes, L.E.; Trotter, M. Behaviour classification of extensively grazed sheep using machine learning. Comput. Electron. Agric. 2020, 169, 105175. [Google Scholar] [CrossRef]
- Li, F.; Yang, Y.; Wang, H.; Lv, S.; Wei, W. Effect of heat stress on the behavior and physiology of sheep. J. China Agric. Univ. 2018, 23, 43–49. (In Chinese) [Google Scholar]
- Guo, H. Prevention and treatment measures of common clinical diseases in sheep. Chin. Livest. Poult. Breed. 2020, 16, 155–156. (In Chinese) [Google Scholar]
- Ren, K.; Karlsson, J.; Liuska, M.; Hartikainen, M.; Hansen, I.; Jørgensen, G.H.M. A sensor-fusion-system for tracking sheep location and behaviour. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720921776. [Google Scholar] [CrossRef]
- Yan, L.; Shao, Q.; Xi, G. Research progress of livestock behaviour intelligent monitoring system. J. Domest. Anim. Ecol. 2014, 35, 6–10. (In Chinese) [Google Scholar]
- Alvarenga, F.A.P.; Borges, I.; Palkovič, L.; Rodina, J.; Oddy, V.H.; Dobos, R.C. Using a three-axis accelerometer to identify and classify sheep behaviour at pasture. Appl. Anim. Behav. Sci. 2016, 181, 91–99. [Google Scholar] [CrossRef]
- Barwick, J.; Lamb, D.W.; Dobos, R.; Welch, M.; Trotter, M. Categorising sheep activity using a tri-axial accelerometer. Comput. Electron. Agric. 2018, 145, 289–297. [Google Scholar] [CrossRef]
- Riaboff, L.; Shalloo, L.; Smeaton, A.F.; Couvreur, S.; Madouasse, A.; Keane, M.T. Predicting livestock behavior using accelerometers: A systematic review of processing techniques for ruminant behaviour prediction from raw accelerometer data. Comput. Electron. Agric. 2022, 192, 106610. [Google Scholar] [CrossRef]
- Augustine, D.J.; Derner, J.D. Assessing herbivore foraging behavior with GPS collars in a semiarid grassland. Sensors 2013, 13, 3711–3723. [Google Scholar] [CrossRef]
- Sheng, H.; Zhang, S.; Zuo, L.; Duan, G.; Zhang, H.; Okinda, C.; Shen, M.; Chen, K.; Lu, M.; Norton, T. Construction of sheep forage intake estimation models based on sound analysis. Biosyst. Eng. 2020, 192, 144–158. [Google Scholar] [CrossRef]
- Fuentes, A.; Yoon, S.; Park, J.; Park, D.S. Deep learning-based hierarchical cattle behavior recognition with spatio-temporal information. Comput. Electron. Agric. 2020, 177, 105627. [Google Scholar] [CrossRef]
- Bailey, D.W.; Trotter, M.G.; Knight, C.W.; Thomas, M.G. Use of GPS tracking collars and accelerometers for rangeland livestock production research. Trans. Anim. Sci. 2018, 2, 81–88. [Google Scholar] [CrossRef]
- Bar, D.; Solomon, R.; Service, E. Rumination collars: What can they tell us. In Proceedings of the First North American Conference on Precision Dairy Management, Toronto, Canada, 2–5 March 2010; Volume 2, pp. 214–215. [Google Scholar]
- Verdon, M.; Rawnsley, R.; Raedts, P.; Freeman, M. The behaviour and productivity of mid-lactation dairy cows provided daily pasture allowance over 2 or 7 intensively grazed strips. Animals 2018, 8, 115. [Google Scholar] [CrossRef] [Green Version]
- Barwick, J.; Lamb, D.W.; Dobos, R.; Welch, M.; Schneider, D.; Trotter, M. Identifying sheep activity from tri-axial acceleration signals using a moving window classification model. Remote Sens. 2020, 12, 646. [Google Scholar] [CrossRef] [Green Version]
- Mansbridge, N.; Mitsch, J.; Bollard, N.; Ellis, K.; Miguel-Pacheco, G.G.; Dottorini, T.; Kaler, J. Feature selection and comparison of machine learning algorithms in classification of grazing and rumination behavior in sheep. Sensors 2018, 18, 3532. [Google Scholar] [CrossRef] [Green Version]
- Decandia, M.; Giovanetti, V.; Molle, G.; Acciaro, M.; Mameli, M.; Cabiddu, A.; Cossu, R.; Serra, M.G.; Manca, C.; Rassu, S.P.G.; et al. The effect of different time epoch data settings on the classification of sheep behavior using tri-axial accelerometry. Comput. Electron. Agric. 2018, 154, 112–119. [Google Scholar] [CrossRef]
- Marais, J.; Le Roux, S.P.; Wolhuter, R.; Niesler, T. Automatic classification of sheep behaviour using 3-axis accelerometer data. In Proceedings of the Twenty-Fifth Annual Symposium of the Pattern Recognition Association of South Africa (PRASA), RobMech and AfLaT International Joint Symposium, Cape Town, South Africa, 27–28 November 2014; pp. 97–102. [Google Scholar]
- Le Roux, S.P.; Marias, J.; Wolhuter, R.; Niesler, T.; le Roux, S.P. Animal-borne behaviour classification for sheep (Dohne Merino) and Rhinoceros (Ceratotherium simum and Diceros bicornis). Anim. Biotelem. 2017, 5, 25. [Google Scholar] [CrossRef] [Green Version]
- Walton, E.; Casey, C.; Mitsch, J.; Vázquez-Diosdado, J.A.; Yan, J.; Dottorini, T.; Ellis, K.A.; Winterlich, A.; Kaler, J. Evaluation of sampling frequency, window size and sensor position for classification of sheep behavior. R. Soc. Open Sci. 2018, 5, 171442. [Google Scholar] [CrossRef] [Green Version]
- Lush, L.; Wilson, R.P.; Holton, M.D.; Hopkins, P.; Marsden, K.A.; Chadwick, D.R.; King, A.J. Classification of sheep urination events using accelerometers to aid improved measurements of livestock contributions to nitrous oxide emissions. Comput. Electron. Agric. 2018, 150, 170–177. [Google Scholar] [CrossRef] [Green Version]
- Nóbrega, L.; Gonçalves, P.; Antunes, M.; Corujo, D. Assessing sheep behavior through low-power microcontrollers in smart agriculture scenarios. Comput. Electron. Agric. 2020, 173, 105444. [Google Scholar] [CrossRef]
- Guo, L.; Welch, M.; Dobos, R.; Kwan, P.; Wang, W. Comparison of grazing behaviour of sheep on pasture with different sward surface heights using an inertial measurement unit sensor. Comput. Electron. Agric. 2018, 150, 394–401. [Google Scholar] [CrossRef]
- Liu, Y. Research of Dairy Goat Behaviour Classification Based on Multi-Sensor Data. Master’s Thesis, Northwest A&F University, Xianyang, China, 2020. (In Chinese). [Google Scholar]
- Rokach, L. Ensemble-based classifiers. Artif. Intell. Rev. 2010, 33, 1–39. [Google Scholar] [CrossRef]
- Schapire, R.E. The strength of weak learnability. Mach. Learn. 1990, 5, 197–227. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Polikar, R. Ensemble based systems in decision making. IEEE Circuits Syst. Mag. 2006, 6, 21–45. [Google Scholar] [CrossRef]
- Sun, Y.M.; Kamel, M.S.; Wong, A.K.C.; Wang, Y. Cost-sensitive boosting for classification of imbalanced data. Pattern Recognit. 2007, 40, 3358–3378. [Google Scholar] [CrossRef]
- Galar, M.; Fernández, A.; Barrenechea, E.; Herrera, F. EUSBoost: Enhancing ensembles for highly imbalanced data-datasets by evolutionary undersampling. Pattern Recognit. 2013, 46, 3460–3471. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: A new learning scheme of feedforward neural networks. In 2004 IEEE International Joint Conference on Neural Networks (IEEE Cat. No.04CH37541); IEEE: Budapest, Hungary, 25–29 July 2004; Volume 2, pp. 985–990. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Huang, G.; Huang, G.B.; Song, S.J.; You, K.Y. Trends in extreme learning machines: A review. Neural Netw. 2015, 61, 32–48. [Google Scholar] [CrossRef]
- Freund, Y.; Schapire, R.E. A decision-theoretic generalization of on-line learning and an application to boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Santegoeds, O.J. Predicting Dairy Cow Parturition Using Real-Time Behaviour Data from Accelerometers. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Tamura, T.; Okubo, Y.; Deguchi, Y.; Koshikawa, S.; Takahashi, M.; Chida, Y.; Okada, K. Dairy cattle behavior classifications based on decision tree learning using 3-axis neck-mounted accelerometers. Anim. Sci. J. 2019, 90, 589–596. [Google Scholar] [CrossRef] [PubMed]
- Andriamandroso, A.L.H.; Lebeau, F.; Beckers, Y.; Froidmont, E.; Dufrasne, I.; Heinesch, B.; Dumortier, P.; Blanchy, G.; Blaise, Y.; Bindelle, J. Development of an open-source algorithm based on inertial measurement units (IMU) of a smartphone to detect cattle grass intake and ruminating behaviors. Comput. Electron. Agric. 2017, 139, 126–137. [Google Scholar] [CrossRef]
- Kleanthous, N.; Hussain, A.; Mason, A.; Sneddon, J. Data science approaches for the analysis of animal behaviours. In Intelligent Computing Methodologies, Lecture Notes in Computer Science; Huang, D.S., Huang, Z.K., Hussain, A., Eds.; Springer International Publishing: Cham, Switzerland, 24 July 2019; pp. 411–422. [Google Scholar] [CrossRef]
- Sakai, K.; Oishi, K.; Miwa, M.; Kumagai, H.; Hirooka, H. Behavior classification of goats using 9-axis multi sensors: The effect of imbalanced datasets on classification performance. Comput. Electron. Agric. 2019, 166, 105027. [Google Scholar] [CrossRef]
- Hamäläinen, W.; Jarvinen, M.; Martiskainen, P.; Mononen, J. Jerk-based feature extraction for robust activity recognition from acceleration data. In Proceedings of the 2011 11th International Conference on Intelligent Systems Design and Applications (ISDA), Córdoba, Spain, 22–24 November 2011; IEEE: Cordoba, Spain, 2011; pp. 831–836. [Google Scholar] [CrossRef]
- Hetem, R.S.; Strauss, W.M.; Heusinkveld, B.G.; de Bie, S.; Prins, H.H.T.; van Wieren, S.E. Energy advantage of orientation to solar radiation in three African ruminants. J. Therm. Biol. 2011, 36, 452–460. [Google Scholar] [CrossRef]
- Animut, G.; Goetsch, A.L.; Aiken, G.E.; Puchala, R.; Detweiler, G.; Krehbiel, C.R.; Merkel, R.C.; Sahlu, T.; Dawson, L.J.; Johnson, Z.B.; et al. Grazing behavior and energy expenditure by sheep and goats co-grazing grass/forb pastures at three stocking rates. Small Rumin. Res. 2005, 59, 191–201. [Google Scholar] [CrossRef]
- Lin, L.; Dickhoefer, U.; Müller, K.; Wurina; Susenbeth, A. Grazing behavior of sheep at different stocking rates in the Inner Mongolian steppe, China. Appl. Anim. Behav. Sci. 2011, 129, 36–42. [Google Scholar] [CrossRef]
- Wang, S.P.; Li, Y.H. Behavioral ecology of grazing sheep V. Relationship between grazing behavior parameters and grassland conditions. Acta Pratacult. Sin. 1997, 4, 32–39. (In Chinese) [Google Scholar]
- Zhang, X.Q.; Hou, X.Y.; Zhang, Y.J. A comprehensive review of the estimation technology of feed intake and diet composition in grazing livestock. Pratacult. Sci. 2012, 29, 291–300. (In Chinese) [Google Scholar]
- Huang, R.Z. Study on Herbage Intake and Analysis of the Nutrient Surplus and Defict of Grazing Sheep in Seasonal Change. Master’s Thesis, Shihezi University, Shihezi, China, 2016. (In Chinese). [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Position | Sensor | Data Collection Frequency | Time Window | The Number of Features Finally Used for Classification | Type of Behavior | Algorithm | Accuracy | Source |
|---|---|---|---|---|---|---|---|---|
| Neck | Tri-axial accelerometer | 100 Hz | 5.12 s | 10 | Lying Standing Walking Running Grazing | Quadratic Discriminant Analysis | 89.7% | Marais et al. [20] |
| Under-jaw | Three-axis accelerometer | 5, 10, 25 Hz | 5 s | 5 | Grazing Lying Running Standing Walking | Decision Tree | 85.5% | Alvarenga et al. [8] |
| Neck | Three-dimensional accelerometer | 100 Hz | 5.3 s | 27 | Standing Walking Grazing Running Lying | Linear Discriminant Analysis | 82.40% | Le Roux et al. [21] |
| Ear Neck | Tri-axial accelerometer | 32 Hz | 5, 7 s | 44 | Walking Standing Lying | Random Forest | 95%F-score: 91–97% | Walton et al. [22] |
| Neck | Tri-axial accelerometer and gyroscope | 16 Hz | 7 s | 39 | Grazing Ruminating | Random Forest | 92% | Mansbridge et al. [18] |
| Ear Neck Leg | Tri-axial accelerometer | 12 Hz | 10 s | 14 | Grazing Standing Walking | Quadratic Discriminant Analysis | 94–99% | Barwick et al. [9] |
| Under-jaw | Three-axial accelerometer and a force sensor | 62.5 Hz | 30 s | 15 | Grazing Ruminating Other activities | Discriminant Analysis | 89.7% | Decandia et al. [19] |
| Rear | Accelerometers | 40 Hz | 3 s | 30 | Foraging Walking Running Standing Lying Urinating | Random Forest | 0.945(Kappa value) | Lush et al. [23] |
| Ear | Accelerometers | 12.5 Hz | 10 s | 19 | Grazing Lying Standing Walking | Support Vector Machine | 76.9% | Fogarty et al. [3] |
| Neck | Three-axial accelerometer and ultrasound transducer | 50 Hz | 5 s | 11 | Infracting Eating Moving Running Standing Invalid | Decision Tree | 91.78% | Nóbrega et al. [24] |
| Behavior | Description |
|---|---|
| Walking | The head moves forward/backward or sideways for at least two consecutive steps. From one place to another, the legs on the diagonal of the sheep move at the same time. Slow movement during grazing is excluded. |
| Standing | Sheep in standing position. The limbs and head are still or slightly moved, including standing chewing and ruminating. |
| Grazing | Sheep graze with their heads down, chew and move slowly to find grass. |
| Lying | Sheep in lying position. The head is down or up, and still or slightly moving. Chewing and ruminating are included. |
| Running | Sheep run faster to escape obstacles or catch up with other companions. In most cases, two front/rear legs move at the same time, and there is no biting or chewing. |
| Behavior Number | Behavior | Total Time (s) | Total Data Rows |
|---|---|---|---|
| 1 | Walking | 4352 | 87,040 |
| 2 | Standing | 15,499 | 309,980 |
| 3 | Grazing | 24,374 | 487,480 |
| 4 | Lying | 9534 | 190,680 |
| 5 | Running | 97 | 1940 |
| Feature | The Number of Features | Equations/Description # |
|---|---|---|
| Minimum value | 6 | Minimum value of all window values |
| Maximum value | 6 | Maximum value of all window values |
| Median | 6 | Median value of all window values |
| Upper quartile | 6 | Upper quartile value of all window values |
| Lower quartile | 6 | Lower quartile value of all window values |
| Kurtosis | 6 | Kurtosis calculated from window values |
| Skewness | 6 | Skewness calculated from window values |
| Range | 6 | |
| Mean | 6 | |
| Variance | 6 | |
| Standard deviation | 6 | |
| Root mean square (RMS) | 6 | |
| Signal magnitude area (SMA) | 2 | |
| Energy | 2 | |
| Entropy | 2 | |
| Dominant frequency | 6 | After applying Fourier transformation, this is the frequency at which the signal has its highest power |
| Spectral energy | 6 | |
| Spectral entropy | 6 | |
| Vectorial dynamic body acceleration (VeDBA) | 15 | |
| Features of VeDBA | Minimum value, maximum value, median, upper quartile, lower quartile, kurtosis, skewness, range, mean, variance, standard deviation, RMS, dominant frequency, spectral energy, spectral entropy |
| Time Window | Sensor | ELM | AdaBoost | Stacking | Number of Classified Behaviors | |||
|---|---|---|---|---|---|---|---|---|
| Accuracy (%) | Kappa Value | Accuracy (%) | Kappa Value | Accuracy (%) | Kappa Value | |||
| 3 s | Accelerometer | 91.5 | 0.871 | 94.7 | 0.921 | 94.6 | 0.918 | 5 |
| Gyroscope | 90.1 | 0.850 | 92.4 | 0.885 | 93.1 | 0.895 | 5 | |
| Accelerometer and Gyroscope | 92.7 | 0.890 | 97.1 | 0.956 | 97.2 | 0.959 | 5 | |
| 5 s | Accelerometer | 93.3 | 0.899 | 97.5 | 0.963 | 97.6 | 0.964 | 4 |
| Gyroscope | 93.0 | 0.894 | 95.0 | 0.923 | 94.9 | 0.922 | 4 | |
| Accelerometer and Gyroscope | 94.7 | 0.920 | 98.9 | 0.983 | 98.9 | 0.983 | 4 | |
| 11 s | Accelerometer | 98.26 | 0.983 | 99.3 | 0.989 | 99.3 | 0.988 | 4 |
| Gyroscope | 97.0 | 0.951 | 96.6 | 0.945 | 96.2 | 0.939 | 4 | |
| Accelerometer and Gyroscope | 98.5 | 0.976 | 99.7 | 0.995 | 99.7 | 0.995 | 4 | |
| Time Window | Sensor | ELM | AdaBoost | Stacking | Number of Classified Behaviors | |||
|---|---|---|---|---|---|---|---|---|
| Accuracy (%) | Kappa Value | Accuracy (%) | Kappa Value | Accuracy (%) | Kappa Value | |||
| 3 s | Accelerometer | 84.8 | 0.796 | 80.2 | 0.735 | 81.2 | 0.749 | 5 |
| Gyroscope | 82.8 | 0.770 | 78.9 | 0.716 | 77.6 | 0.700 | 5 | |
| Accelerometer and Gyroscope | 85.2 | 0.801 | 85.3 | 0.803 | 87.8 | 0.836 | 5 | |
| 5 s | Accelerometer | 83.2 | 0.774 | 78.9 | 0.717 | 83.8 | 0.782 | 4 |
| Gyroscope | 82.7 | 0.767 | 78.6 | 0.711 | 81.4 | 0.750 | 4 | |
| Accelerometer and Gyroscope | 87.4 | 0.830 | 86.2 | 0.814 | 86.2 | 0.815 | 4 | |
| 11 s | Accelerometer | 72.7 | 0.631 | 76.9 | 0.689 | 74.4 | 0.656 | 4 |
| Gyroscope | 66.3 | 0.542 | 63.9 | 0.510 | 64.8 | 0.524 | 4 | |
| Accelerometer and Gyroscope | 78.0 | 0.702 | 67.8 | 0.565 | 71.5 | 0.616 | 4 | |
| Time Window | Model | Performance | Walking | Standing | Grazing | Lying | Running |
|---|---|---|---|---|---|---|---|
| 3 s | Stacking | Precision (%) | 99.3 | 81.9 | 98.5 | 75.8 | 90.3 |
| Recall (%) | 95.4 | 72.8 | 100.0 | 85.4 | 75.7 | ||
| F-score (%) | 97.3 | 77.1 | 99.3 | 80.3 | 82.4 | ||
| 5 s | ELM | Precision (%) | 99.6 | 73.2 | 95.4 | 89.9 | -- |
| Recall (%) | 88.6 | 91.9 | 100.0 | 69.3 | -- | ||
| F-score (%) | 93.8 | 81.4 | 97.6 | 78.3 | -- | ||
| 11 s | ELM | Precision (%) | 97.9 | 63.3 | 82.4 | 92.5 | -- |
| Recall (%) | 59.1 | 94.6 | 100.0 | 52.6 | -- | ||
| F-score (%) | 73.7 | 75.9 | 90.4 | 67.1 | -- |
| Time Window | Model | Accuracy (%) | Kappa Value | |
|---|---|---|---|---|
| Test dataset | 3 s | Stacking | 95.1 | 0.927 |
| 5 s | ELM | 94.4 | 0.915 | |
| 11 s | ELM | 98.4 | 0.975 | |
| CBS test dataset | 3 s | Stacking | 79.0 | 0.719 |
| 5 s | ELM | 78.2 | 0.707 | |
| 11 s | ELM | 63.3 | 0.501 |
| SSH | B-Sheep | P-Sheep | R-Sheep | Average Proportion | |
|---|---|---|---|---|---|
| Short |  |  |  | Walking | 9.91% |
| Grazing | 50.79% | ||||
| Resting | 39.18% | ||||
| Running | 0.12% | ||||
| Medium |  |  |  | Walking | 6.50% |
| Grazing | 54.83% | ||||
| Resting | 38.63% | ||||
| Running | 0.04% | ||||
| Tall |  |  |  | Walking | 6.72% |
| Grazing | 50.70% | ||||
| Resting | 42.52% | ||||
| Running | 0.06% | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Z.; Guo, L.; Shu, H.; Qi, J.; Li, Y.; Xu, B.; Zhang, W.; Wang, K.; Wang, W. Behavior Classification and Analysis of Grazing Sheep on Pasture with Different Sward Surface Heights Using Machine Learning. Animals 2022, 12, 1744. https://0-doi-org.brum.beds.ac.uk/10.3390/ani12141744
Jin Z, Guo L, Shu H, Qi J, Li Y, Xu B, Zhang W, Wang K, Wang W. Behavior Classification and Analysis of Grazing Sheep on Pasture with Different Sward Surface Heights Using Machine Learning. Animals. 2022; 12(14):1744. https://0-doi-org.brum.beds.ac.uk/10.3390/ani12141744
Chicago/Turabian StyleJin, Zhongming, Leifeng Guo, Hang Shu, Jingwei Qi, Yongfeng Li, Beibei Xu, Wenju Zhang, Kaiwen Wang, and Wensheng Wang. 2022. "Behavior Classification and Analysis of Grazing Sheep on Pasture with Different Sward Surface Heights Using Machine Learning" Animals 12, no. 14: 1744. https://0-doi-org.brum.beds.ac.uk/10.3390/ani12141744