Calibration of Large-Scale Spatial Positioning Systems Based on Photoelectric Scanning Angle Measurements and Spatial Resection in Conjunction with an External Receiver Array


Abstract
:1. Introduction
2. Laser Transmitter Measurement System
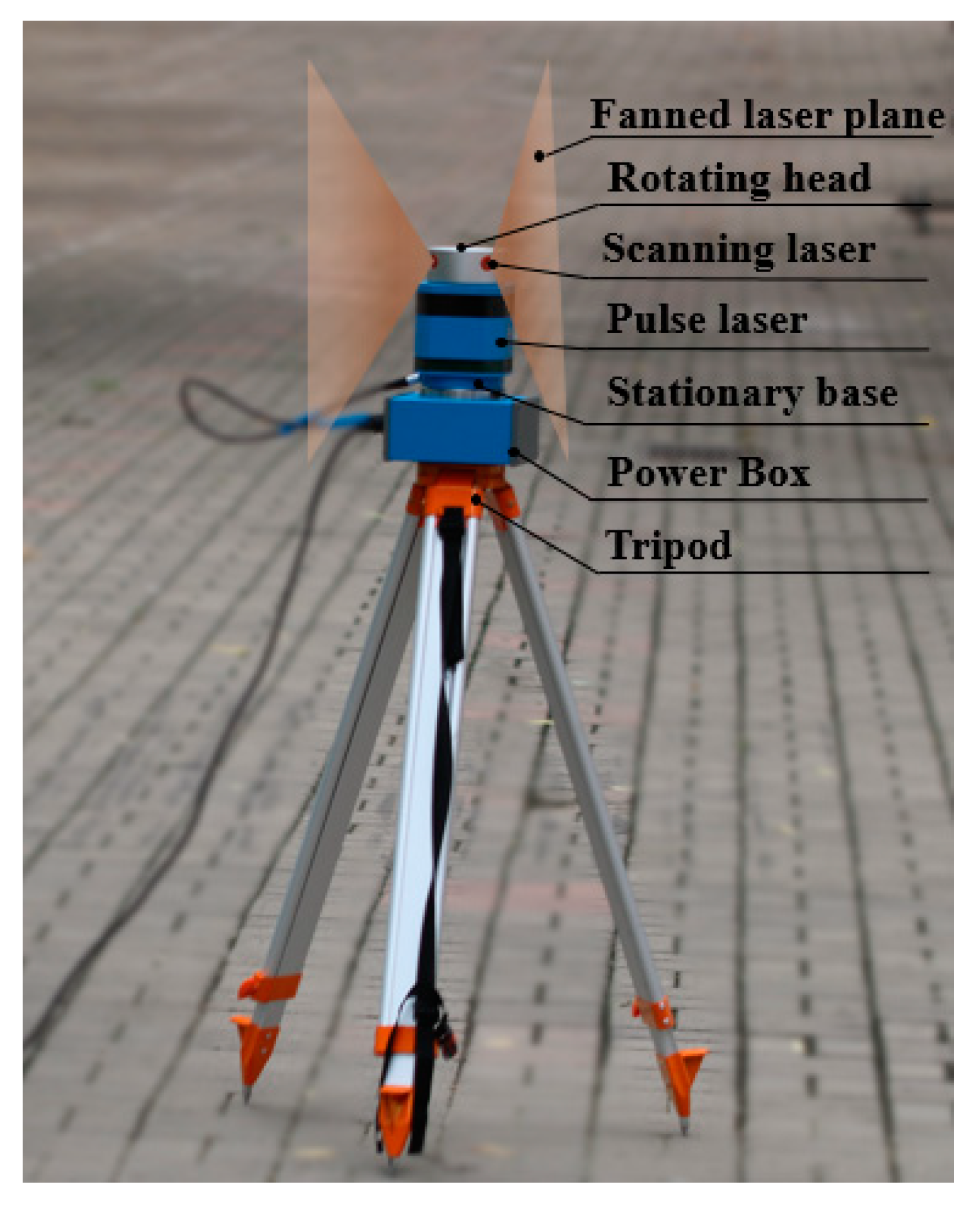
2.1. System Composition and Measurement Principles
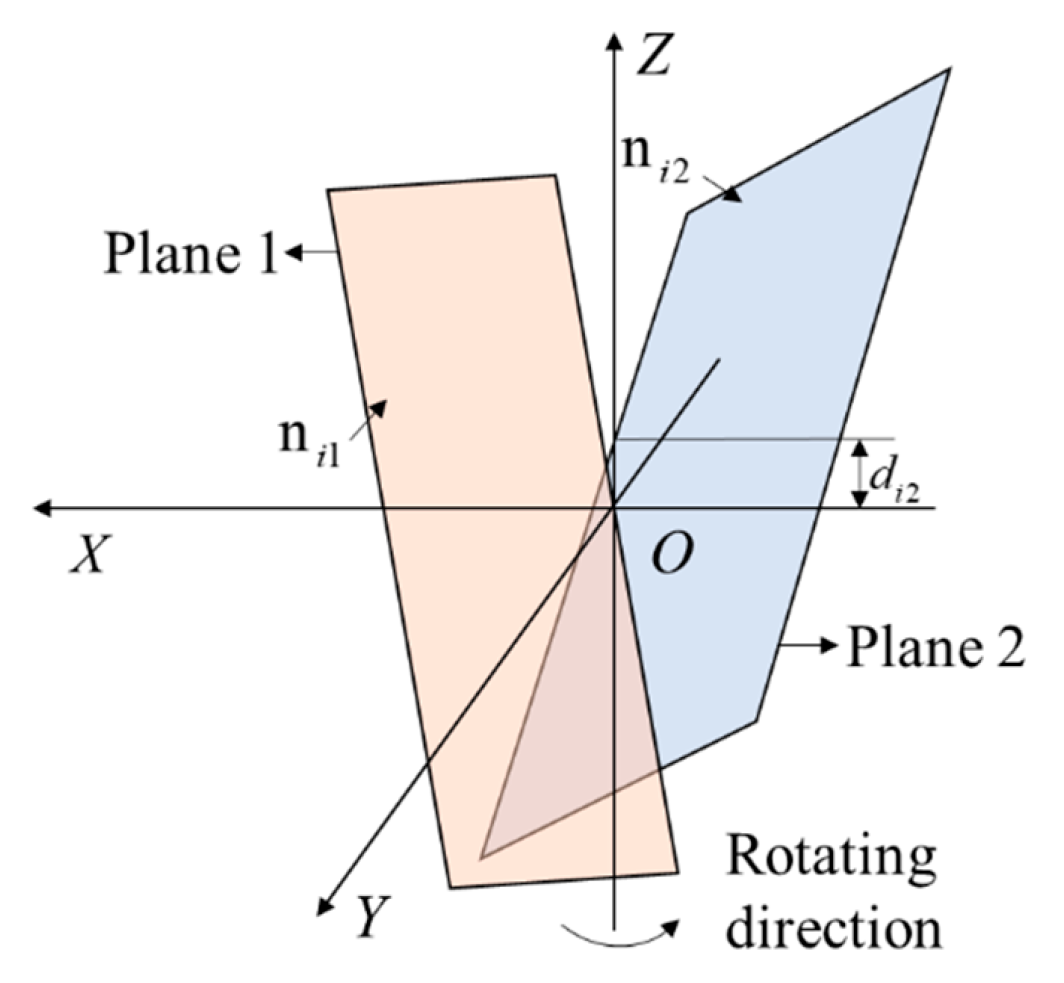
2.2. Single Transmitter Station Angle Measurement Model
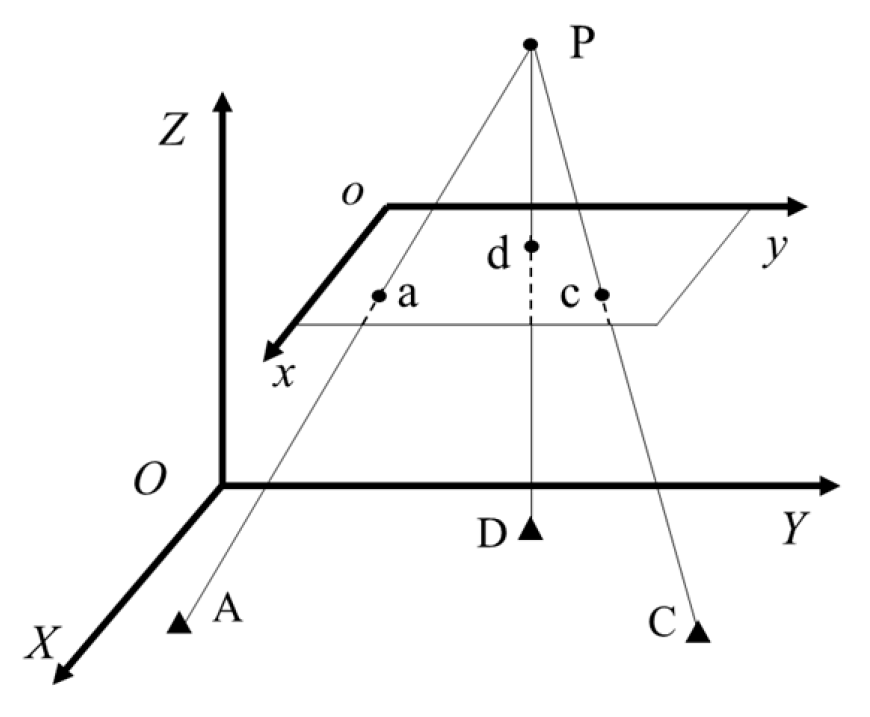
2.3. Space Resection
3. Single Transmitter Station Calibration Method
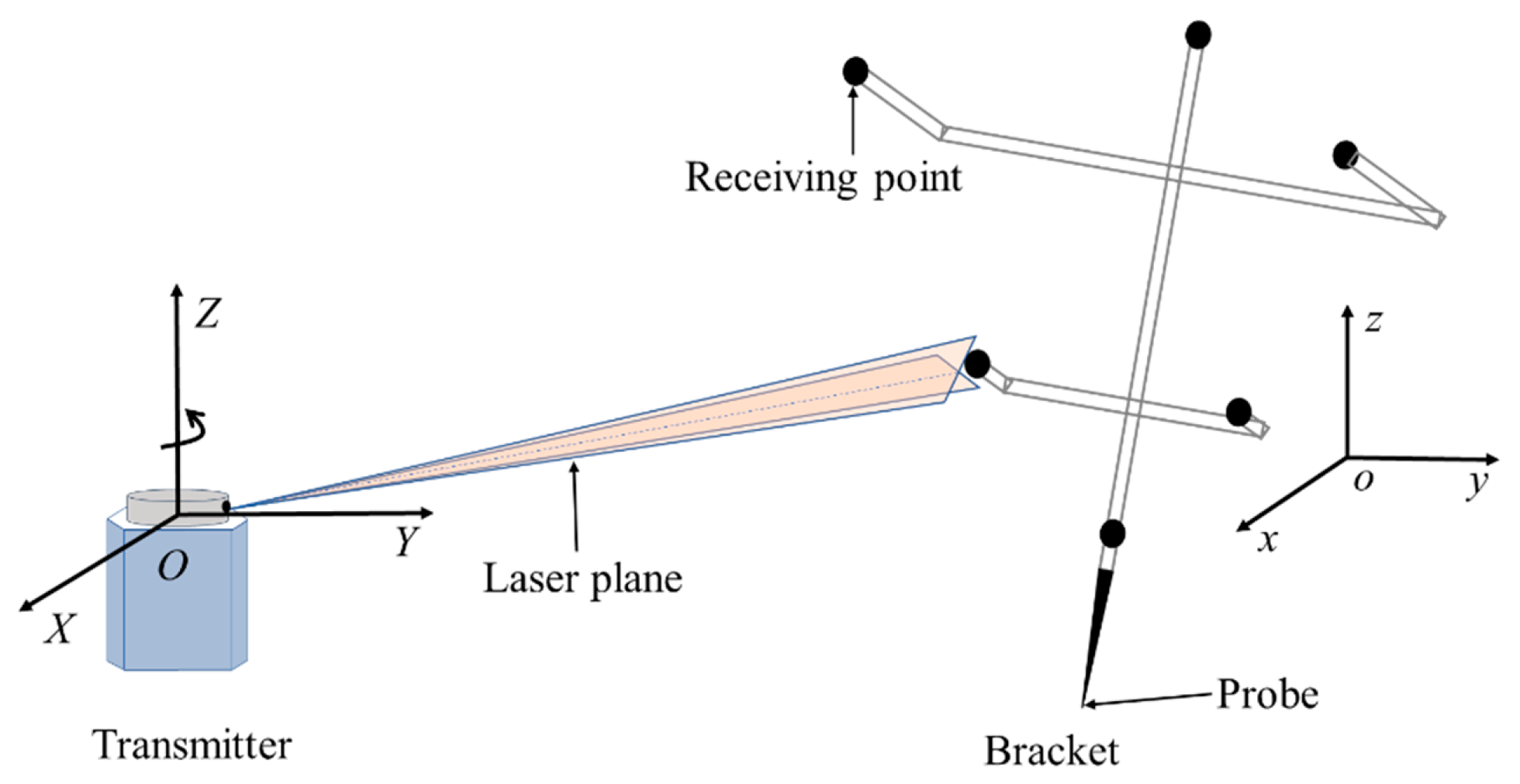
3.1. Photoelectric Scanning Multi-Angle Resection Positioning
3.2. Positioning Optimization Equation
3.3. Optimization Solution Method and Initial Value Estimates
4. Verification Experiments
4.1. Experimental Setup
4.2. Estimation and Analysis of the Experimental Data
4.2.1. Self-verification the Measurement Results
4.2.2. Accuracy Verification Experiment
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shenghua, Y.E.; Zhong, W.; Xinghua, Q. Review and prospect of precision inspection. China Mech. Eng. 2000, 11, 262–263. [Google Scholar]
- Xiong, C.B.; Bai, H.Z.; Li, L.; Zhu, J.G. Self-location method of regional positioning system in engineering survey application. J. Tongji Univ. Nat. Sci. 2017, 45, 1879–1886. [Google Scholar]
- Li, W.; Fang, W.; Hongwen, X. Implementation of measurement method for large scale roomage. J. Nanjing Univ. Aeronaut. Astronaut. 2012, 44, 48. [Google Scholar]
- Ye, S.H.; Zhu, J.G.; Zhang, Z.L.; Zhou, H.; Guo, L. Status and development of large-scale coordinate measurement research. ACTA Metrol. Sin. 2008, 29, 1–6. [Google Scholar]
- Cuypers, W.; Gestel, N.V.; Voet, A.; Kruth, J.P.; Mingneau, J.; Bleys, P. Optical measurement techniques for mobile and large-scale dimensional metrology. Opt. Lasers Eng. 2009, 47, 292–300. [Google Scholar] [CrossRef] [Green Version]
- Peggs, G.N.; Maropoulos, P.G.; Hughes, E.B.; Forbes, A.B.; Robson, S.; Ziebart, M.; Muralikrishnan, B. Recent developments in large-scale dimensional metrology. J. Eng. Manuf. B 2009, 223, 571–595. [Google Scholar] [CrossRef]
- Maisano, D.A.; Jamshidi, J.; Franceschini, F.; Maropoulos, P.G.; Mastrogiacomo, L. Indoor GPS: System functionality and initial performance evaluation. Int. J. Manuf. Res. 2008, 3, 335–349. [Google Scholar] [CrossRef]
- Yang, L.; Yang, X.; Zhu, J.; Duan, M.; Lao, D. Novel method for spatial angle measurement based on rotating planar laser beams. Chin. J. Mech. Eng. Engl. Ed. 2010, 6, 758. [Google Scholar] [CrossRef]
- Maisano, D.A.; Jamshidi, J.; Franceschini, F.; Maropoulos, P.G.; Mastrogiacomo, L.; Mileham, A.R.; Owen, G.W. A comparison of two distributed large-volume measurement systems: The mobile spatial co-ordinate measuring system and the indoor global positioning system. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2009, 223, 511–521. [Google Scholar] [CrossRef]
- Wang, Z.; Mastrogiacomo, L.; Franceschini, F.; Maropoulos, P. Experimental comparison of dynamic tracking performance of iGPS and laser tracker. Int. J. Adv. Manuf. Technol. 2011, 56, 205–213. [Google Scholar] [CrossRef] [Green Version]
- Xiong, Z.; Zhu, J.G.; Zhao, Z.Y.; Yang, X.Y.; Ye, S.H. Workspace measuring and positioning system based on rotating laser planes. Mechanika 2012, 18, 94–98. [Google Scholar] [CrossRef] [Green Version]
- Lao, D.; Yang, X.; Zhu, J.; Yang, L. Study on calibration technology of network laser scan space positioning system. J. Mech. Eng. 2011, 47, 1–6. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhu, J.; Xue, B.; Yang, L. Optimization for calibration of large-scale optical measurement positioning system by using spherical constraint. JOSA A 2014, 31, 1427–1435. [Google Scholar] [CrossRef] [PubMed]
- Zhi, X.; Zhu, J.; Lei, G.; Geng, L.; Ren, Y.; Yang, X.Y.; Ye, S.H. Verification of angle measuring uncertainty for workspace measuring and positioning system. Chin. J. Sens. Actuat. 2012, 25, 229–235. [Google Scholar]
- Lao, D.B.; Yang, X.Y.; Zhu, J.G.; Ye, S.H. Optimization of calibration method for scanning planar laser coordinate measurement system. Opt. Precis. Eng. 2011, 19, 870–877. [Google Scholar]
- Guo, S.; Lin, J.; Ren, Y.; Shi, S.; Zhu, J. Application of a self-compensation mechanism to a rotary-laser scanning measurement system. Meas. Sci. Technol. 2017, 28, 115007. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.H.; Zhu, J.G.; Zhang, G.J.; YE, S.H. Orientation method for workspace measurement positioning system based on scale bar. J. Tianjin Univ. 2012, 45, 814–819. [Google Scholar]
- Zhao, Z.; Zhu, J.; Lin, J.; Yang, L.; Xue, B.; Xiong, Z. Transmitter parameter calibration of the workspace measurement and positioning system by using precise three-dimensional coordinate control network. Opt. Eng. 2014, 53, 084108. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, Z.; Yuan, Y.; Li, L.; Sun, X.; Yu, Q.; Ou, J. A universal and flexible theodolite-camera system for making accurate measurements over large volumes. Opt. Lasers Eng. 2012, 50, 1611–1620. [Google Scholar] [CrossRef]
- Levenberg, K. A method for the solution of certain non-linear problems in least squares. J. Heart Lung Transplant. Off. Publ. Int. Soc. Heart Transplant. 1944, 31, 436–438. [Google Scholar] [CrossRef] [Green Version]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Easa, S.M. Space resection in photogrammetry using collinearity condition without linearisation. Surv. Rev. 2010, 42, 40–49. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plane NO. | 1 | 2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Parameter | a1 | b1 | c1 | d1 | a2 | b2 | c3 | d2 |
| Value | 0 | −0.432757 | 0.901510 | 0 | −0.757457 | 0.00227 | 0.652880 | 0.166872 |
| Point ID | x | y | z |
|---|---|---|---|
| P0 | 0.00 | 0.00 | −943.99 |
| P1 | 356.30 | 0.00 | −771.45 |
| P2 | −221.69 | −277.46 | −771.68 |
| P3 | 193.48 | −9.92 | −442.30 |
| P4 | −112.68 | −157.93 | −441.85 |
| P5 | 0.41 | −0.05 | −371.92 |
| Probe | 0.00 | 0.00 | 0.00 |
| Posture | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| r1 | −0.87051125 | −0.79116910 | −0.77006598 | −0.71680738 |
| r2 | 0.45422411 | 0.45022282 | 0.51670999 | 0.58164049 |
| r3 | 0.18944815 | 0.41394549 | −0.37417830 | −0.38455397 |
| r4 | 0.32510523 | 0.53599181 | 0.61074966 | 0.68063671 |
| r5 | 0.81972864 | 0.83638869 | 0.76657725 | 0.70342008 |
| r6 | −0.47154174 | 0.11474707 | −0.19835402 | −0.20477787 |
| r7 | −0.36948175 | −0.29455764 | 0.18434507 | 0.15139587 |
| r8 | −0.34889166 | 0.31265615 | −0.38127457 | −0.40852700 |
| r9 | −0.86125362 | −0.90304030 | −0.90589527 | −0.90010200 |
| t1 | 7862.72 | 7366.73 | 6177.68 | 5561.38 |
| t2 | −4845.74 | −6228.05 | −7190.85 | −7774.33 |
| t3 | 3074.98 | 1337.52 | −2220.50 | −1858.96 |
| Posture | X | Y | Z | ∆X | ∆Y | ∆Z | ∆L |
|---|---|---|---|---|---|---|---|
| 1 | 9556.1 | 1473.6 | −1126.2 | −2.5 | −0.4 | 0.3 | 2.6 |
| 2 | 9560.5 | 1474.2 | −1126.9 | 1.7 | 0.3 | −0.5 | 1.8 |
| 3 | 9558.4 | 1473.7 | −1126.3 | −0.1 | −0.3 | 0.2 | 0.4 |
| 4 | 9559.5 | 1474.4 | −1126.6 | 0.9 | 0.5 | −0.1 | 1.0 |
| Average | 9558.6 | 1474.0 | −1126.5 | 1.3 | 0.4 | 0.3 | 1.5 |
| Parameter | ∆X | ∆Y | ∆Z | ∆α | ∆β | ∆γ | K |
|---|---|---|---|---|---|---|---|
| Value | 113,526.6 | 97,152.5 | 8704.9 | −0.0240148 | −0.028201 | 0.889006 | 0.99880 |
| Point Name | Method | X | Y | Z | DX | DY | DZ | ΔL |
|---|---|---|---|---|---|---|---|---|
| 1 | RTS | 106,367.8 | 103,597.0 | 10,061.9 | 0.8 | 1.5 | −1.6 | 2.3 |
| RASS | 106,367.0 | 103,595.5 | 10,063.5 | |||||
| 2 | RTS | 106,166.7 | 105,443.3 | 10,060.8 | −1.5 | 1.9 | 1.6 | 2.9 |
| RASS | 106,168.2 | 105,441.4 | 10,059.2 | |||||
| 3 | RTS | 106,156.3 | 106,285.1 | 10,071.0 | −0.7 | 1.5 | −2.1 | 2.7 |
| RASS | 106,157.0 | 106,283.6 | 10,073.1 | |||||
| 4 | RTS | 108,045.9 | 108,595.1 | 10,092.2 | 2.0 | 2.5 | 1.9 | 3.7 |
| RASS | 108,043.9 | 108,592.6 | 10,090.3 | |||||
| 5 | RTS | 109,667.7 | 107,222.4 | 10,097.9 | 0.9 | −2.8 | −0.9 | 3.1 |
| RASS | 109,666.8 | 107,225.2 | 10,098.8 | |||||
| 6 | RTS | 108,026.8 | 105,480.6 | 10,086.4 | −0.6 | 1.6 | −2.0 | 2.6 |
| RASS | 108,027.4 | 105,479.0 | 10,088.4 | |||||
| 7 | RTS | 112,321.8 | 104,221.2 | 10,079.4 | −1.3 | 1.1 | −1.8 | 2.5 |
| RASS | 112,323.1 | 104,220.1 | 10,081.2 | |||||
| 8 | RTS | 122,829.8 | 93,402.2 | 10,026.6 | 0.0 | 0.8 | 1.0 | 1.3 |
| RASS | 122,829.8 | 93,401.4 | 10,025.6 | |||||
| 9 | RTS | 126,278.7 | 96,203.8 | 10,097.0 | 1.9 | 2.4 | −2.4 | 3.9 |
| RASS | 126,276.8 | 96,201.4 | 10,099.4 | |||||
| 10 | RTS | 110,704.1 | 102,478.5 | 10,061.2 | 1.7 | 0.6 | 1.8 | 2.5 |
| RASS | 110,702.4 | 102,477.9 | 10,059.4 | |||||
| 11 | RTS | 110,464.1 | 105,179.0 | 10,084.5 | 1.2 | −1.7 | −1.2 | 2.5 |
| RASS | 110,462.9 | 105,180.7 | 10,085.7 | |||||
| Average | 0.4 | 0.8 | −0.5 | 2.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, C.; Bai, H. Calibration of Large-Scale Spatial Positioning Systems Based on Photoelectric Scanning Angle Measurements and Spatial Resection in Conjunction with an External Receiver Array. Appl. Sci. 2020, 10, 925. https://0-doi-org.brum.beds.ac.uk/10.3390/app10030925
Xiong C, Bai H. Calibration of Large-Scale Spatial Positioning Systems Based on Photoelectric Scanning Angle Measurements and Spatial Resection in Conjunction with an External Receiver Array. Applied Sciences. 2020; 10(3):925. https://0-doi-org.brum.beds.ac.uk/10.3390/app10030925
Chicago/Turabian StyleXiong, Chunbao, and Hongzhi Bai. 2020. "Calibration of Large-Scale Spatial Positioning Systems Based on Photoelectric Scanning Angle Measurements and Spatial Resection in Conjunction with an External Receiver Array" Applied Sciences 10, no. 3: 925. https://0-doi-org.brum.beds.ac.uk/10.3390/app10030925