Driver Stress State Evaluation by Means of Thermal Imaging: A Supervised Machine Learning Approach Based on ECG Signal

 ,
,  , , and
, , and
Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Procedure and Data Acquisition
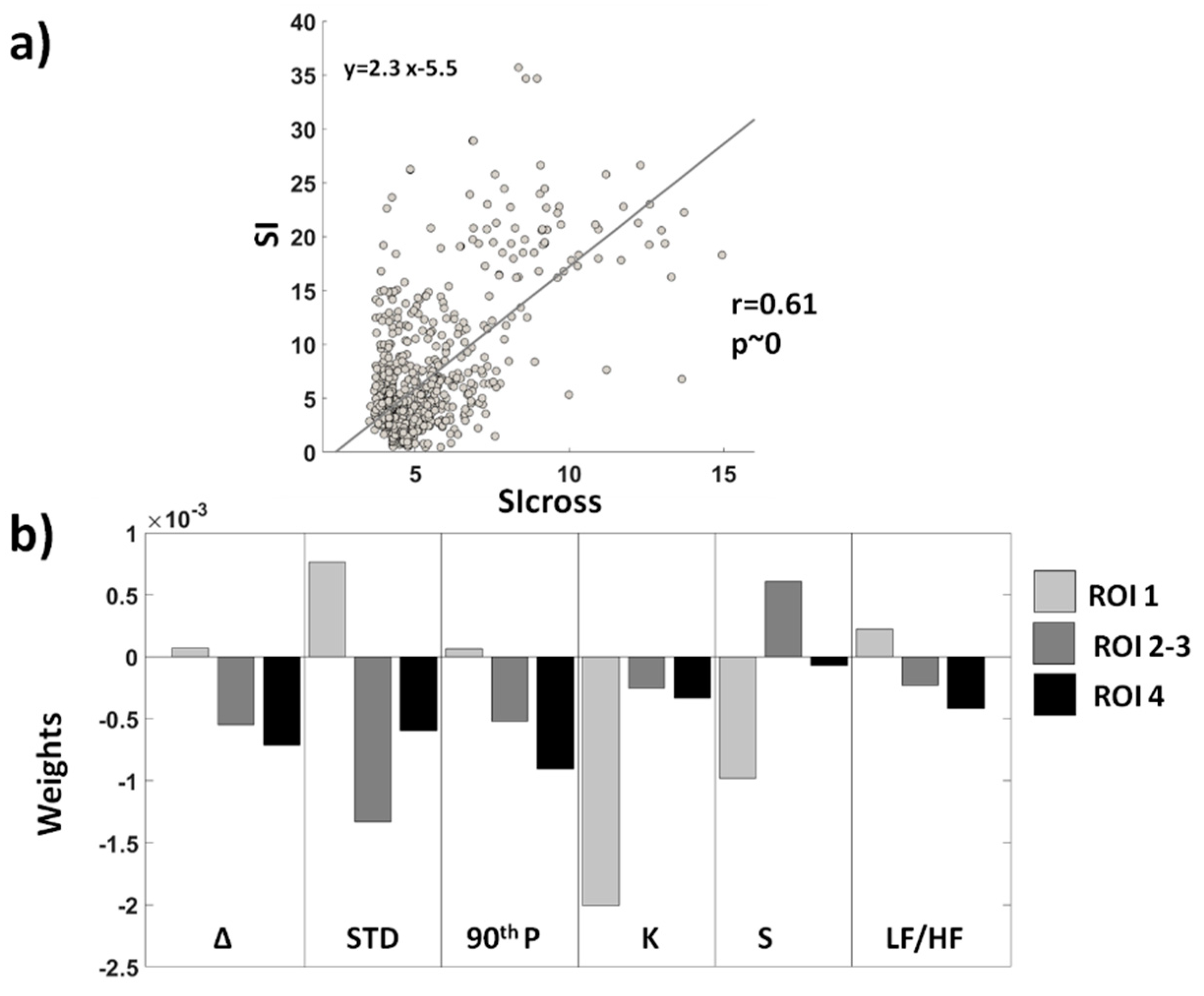
2.3. Analysis of ECG Signals
2.4. Analysis of Visible and Thermal Imaging Data
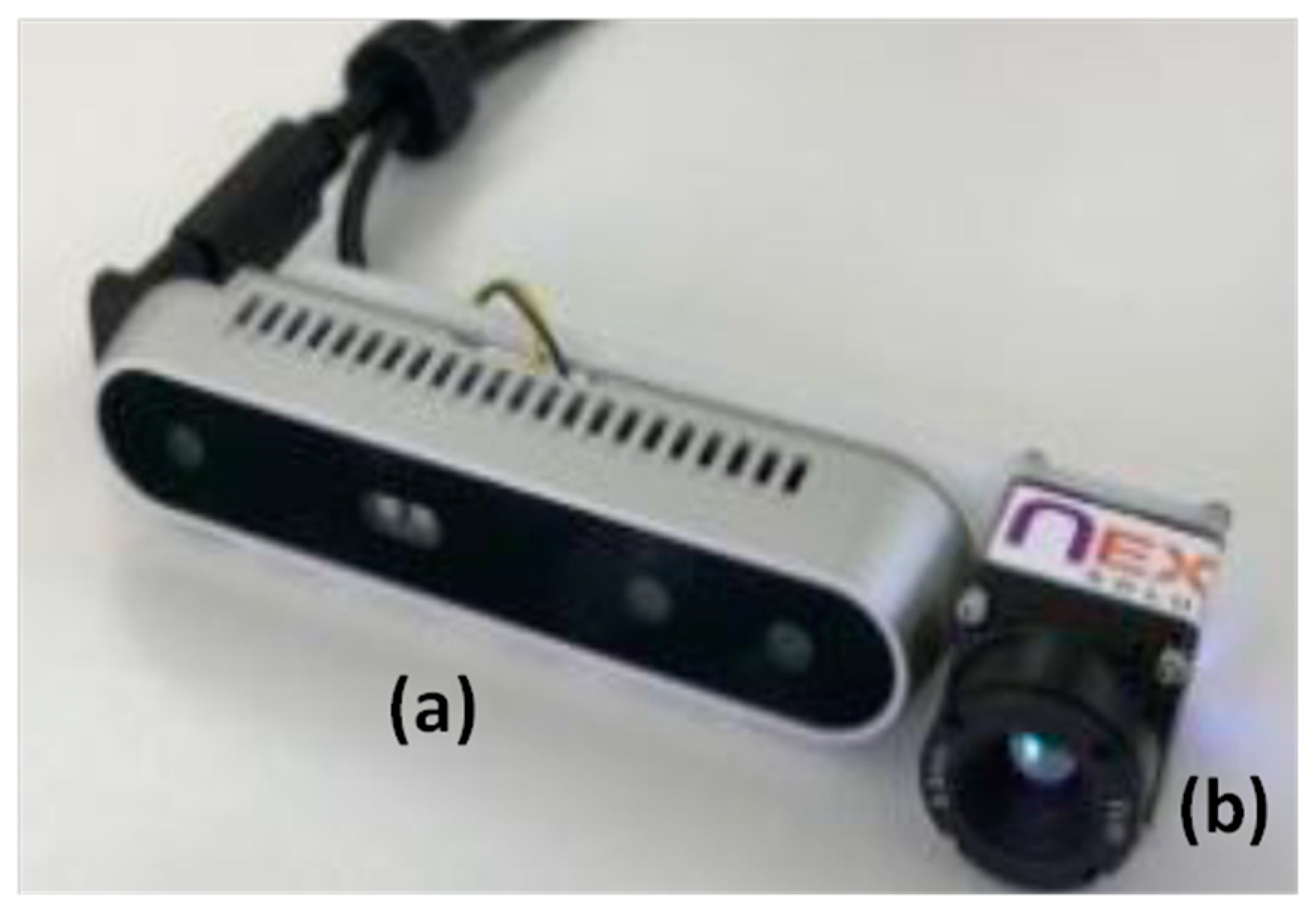
2.4.1. Visible and Thermal Data Co-Registration
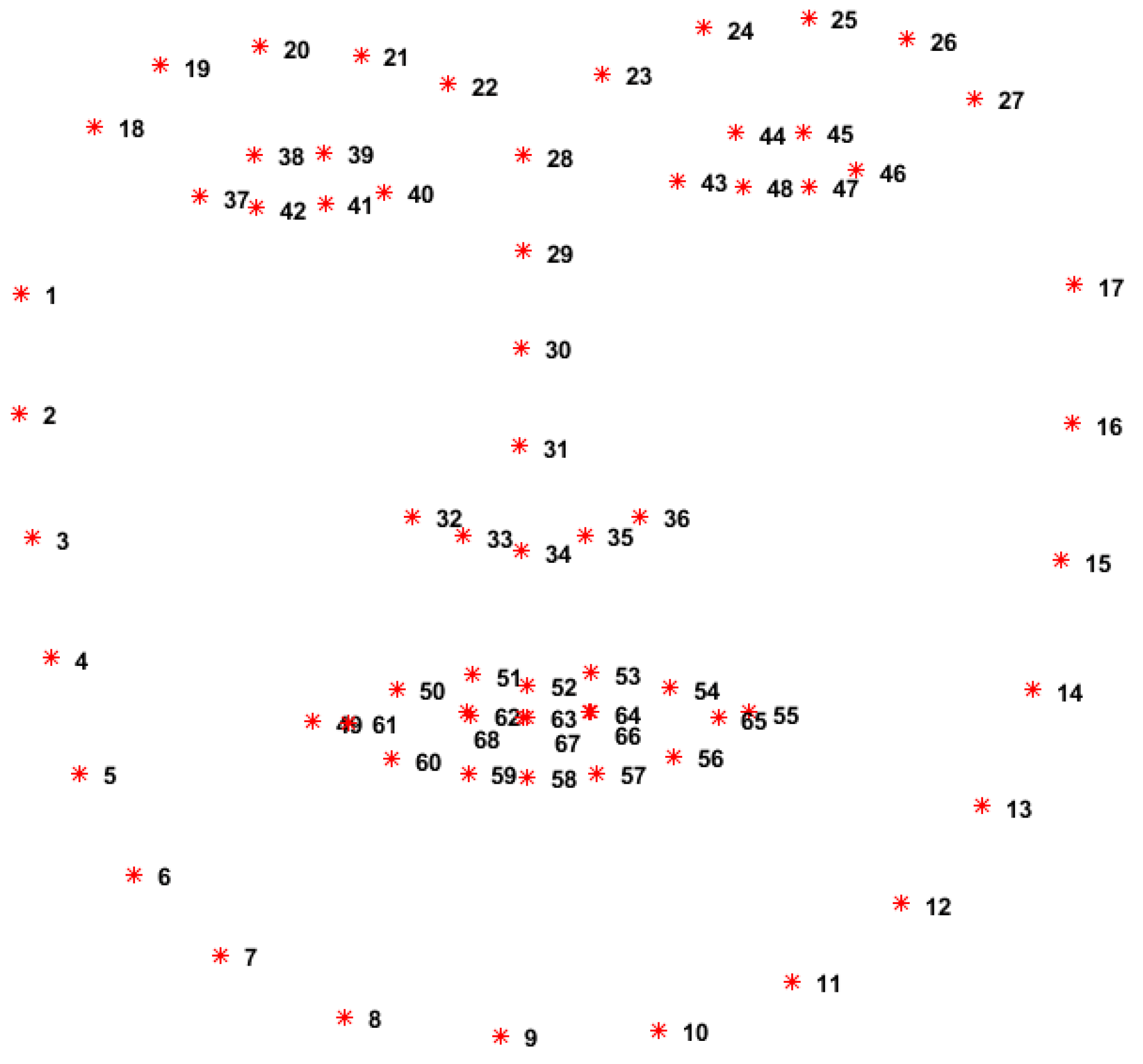
2.4.2. Facial Landmark Detection in the Visible Domain
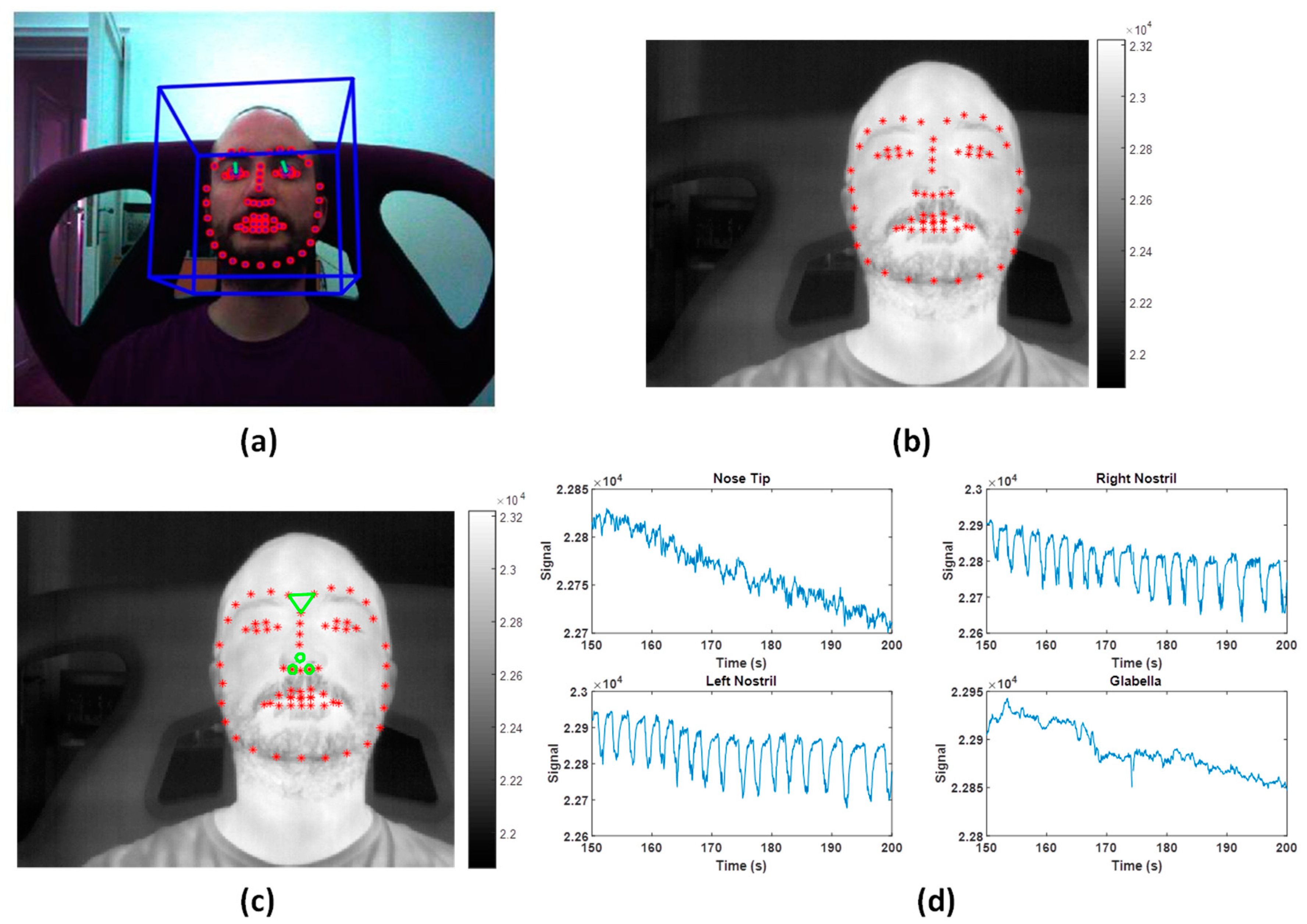
2.4.3. Thermal Data Extraction and Analysis
- (1)
- Absolute value of the difference between the average of the signal in the first 5 s and in the last 5 s (Δ);
- (2)
- Standard deviation of the raw thermal signals (STD);
- (3)
- The 90th percentile of the raw thermal signals (90th P);
- (4)
- Kurtosis of the raw thermal signals (K);
- (5)
- Skewness of the raw thermal signals (S);
- (6)
- Ratio of the power spectral density of the raw thermal signals evaluated in the low-frequency band (LF = (0.04–0.15) Hz) and in the high-frequency band (HF = (0.15–0.4) Hz) (LF/HF).
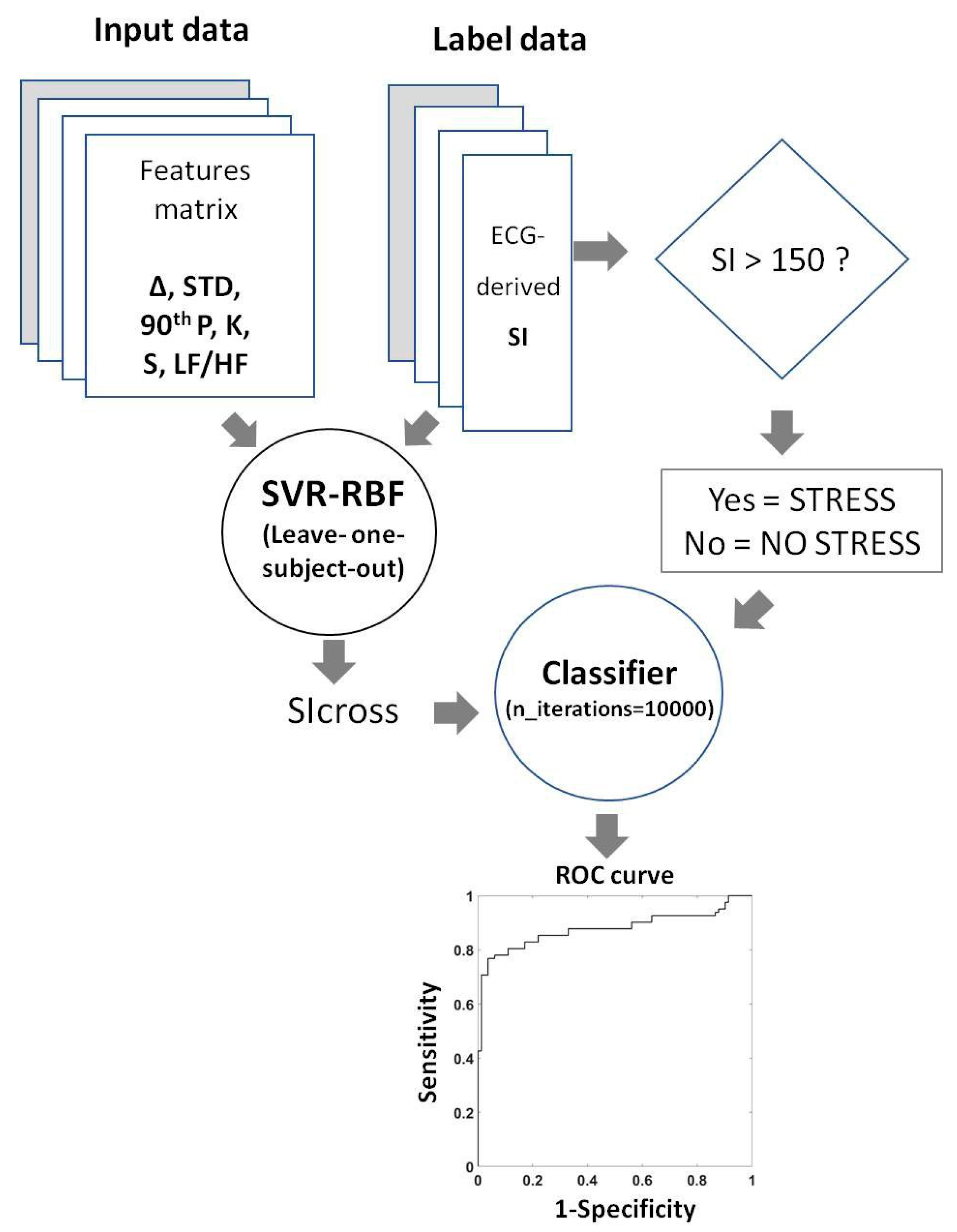
2.4.4. Application of Supervised Machine Learning
3. Results
3.1. Visible and Thermal Imaging Co-Registration and Processing
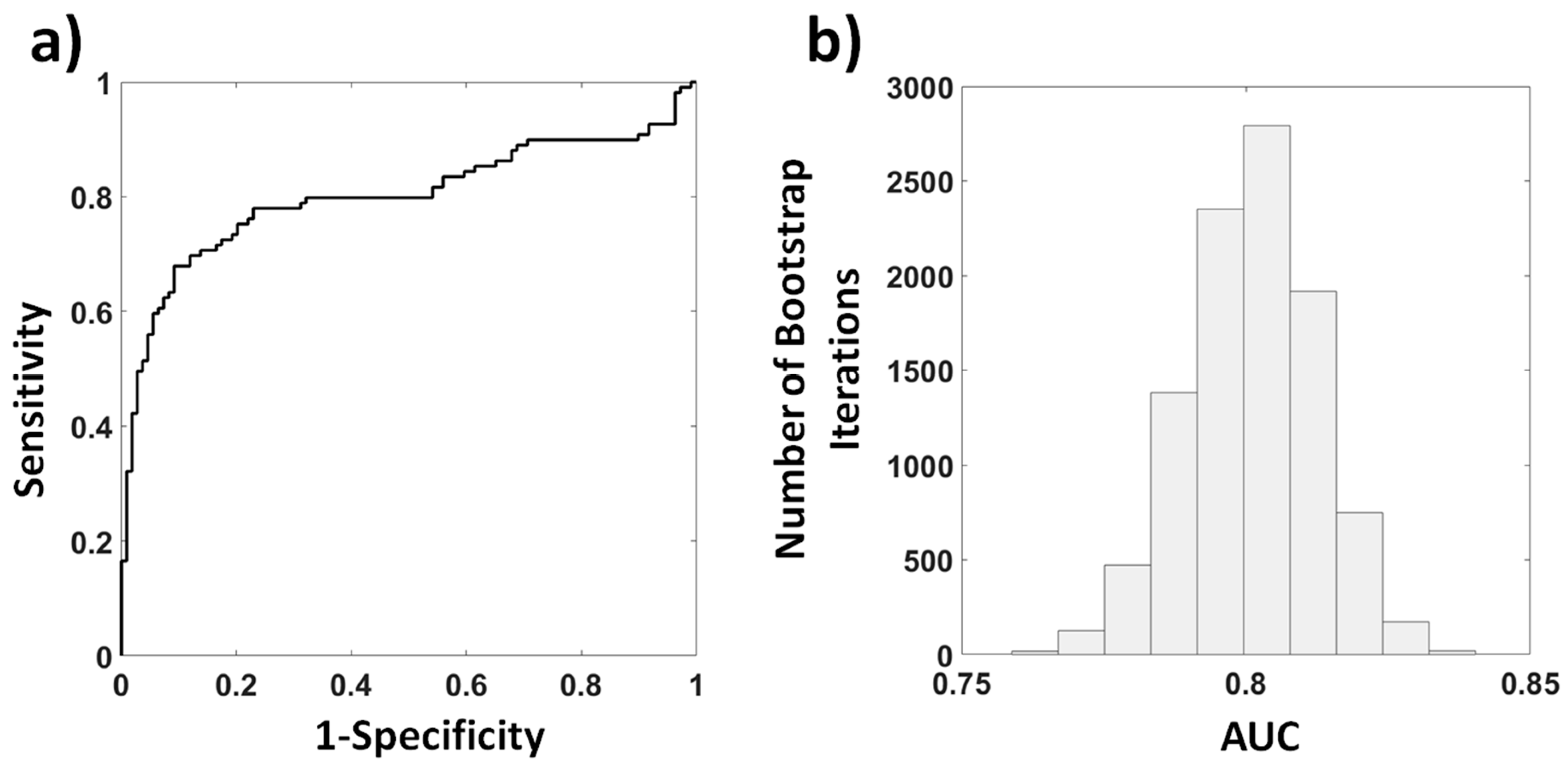
3.2. Performances of Supervised Machine Learning Approach
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- WHO. Global Status Report on Road Safety 2018: Summary (No. WHO/NMH/NVI/18.20); WHO: Geneva, Switzerland, 2018. [Google Scholar]
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three decades of driver assistance systems: Review and future perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- Weon, I.-S.; Lee, S.-G.; Ryu, J.-K. Object Recognition based interpolation with 3d lidar and vision for autonomous driving of an intelligent vehicle. IEEE Access 2020, 8, 65599–65608. [Google Scholar] [CrossRef]
- Catten, J.C.; McClellan, S. System and Method for Alerting Drivers to Road Conditions. U.S. Patent 8,188,887, 29 May 2012. [Google Scholar]
- Damiani, S.; Deregibus, E.; Andreone, L. Driver-vehicle interfaces and interaction: Where are they going? Eur. Transp. Res. Rev. 2009, 1, 87–96. [Google Scholar] [CrossRef] [Green Version]
- Huynh-The, T.; Banos, O.; Le, B.-V.; Bui, D.-M.; Yoon, Y.; Lee, S. Traffic behavior recognition using the pachinko allocation model. Sensors 2015, 15, 16040–16059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cruz, L.C.; Macías, A.; Domitsu, M.; Castro, L.A.; Rodríguez, L.-F. Risky driving detection through urban mobility traces: A preliminary approach. In Context-Awareness and Context-Driven Interaction, Proceedings of the Ubiquitous Computing and Ambient Intelligence, Carrillo, CR, USA, 2–6 December 2013; Urzaiz, G., Ochoa, S.F., Bravo, J., Chen, L.L., Oliveira, J., Eds.; Springer: Cham, Switzerland, 2013; pp. 382–385. [Google Scholar]
- Distracted Driving. Available online: https://www.nhtsa.gov/risky-driving/distracted-driving (accessed on 14 August 2020).
- Dingus, T.A.; Guo, F.; Lee, S.; Antin, J.F.; Perez, M.; Buchanan-King, M.; Hankey, J. Driver crash risk factors and prevalence evaluation using naturalistic driving data. Proc. Natl. Acad. Sci. USA 2016, 113, 2636–2641. [Google Scholar] [CrossRef] [Green Version]
- Guettas, A.; Ayad, S.; Kazar, O. Driver state monitoring system: A review. In Proceedings of the 4th International Conference on Big Data and Internet of Things, Tangier, Morocco, 23–24 October 2019; pp. 1–7. [Google Scholar]
- Minhad, K.N.; Ali, S.H.M.; Reaz, M.B.I. Happy-anger emotions classifications from electrocardiogram signal for automobile driving safety and awareness. J. Transp. Health 2017, 7, 75–89. [Google Scholar] [CrossRef]
- Lee, B.G.; Chong, T.W.; Lee, B.L.; Park, H.J.; Kim, Y.N.; Kim, B. Wearable mobile-based emotional response-monitoring system for drivers. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 636–649. [Google Scholar] [CrossRef]
- Barua, S.; Ahmed, M.U.; Ahlström, C.; Begum, S. Automatic driver sleepiness detection using EEG, EOG and contextual information. Expert Syst. Appl. 2019, 115, 121–135. [Google Scholar] [CrossRef]
- Zeng, H.; Yang, C.; Dai, G.; Qin, F.; Zhang, J.; Kong, W. EEG classification of driver mental states by deep learning. Cogn. Neurodyn. 2018, 12, 597–606. [Google Scholar] [CrossRef]
- Chen, L.; Zhao, Y.; Ye, P.; Zhang, J.; Zou, J. Detecting driving stress in physiological signals based on multimodal feature analysis and kernel classifiers. Expert Syst. Appl. 2017, 85, 279–291. [Google Scholar] [CrossRef]
- Healey, J.A.; Picard, R.W. Detecting stress during real-world driving tasks using physiological sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef] [Green Version]
- Munla, N.; Khalil, M.; Shahin, A.; Mourad, A. Driver stress level detection using HRV analysis. In Proceedings of the 2015 International Conference on Advances in Biomedical Engineering (ICABME), Beirut, Lebanon, 16–18 September 2015; pp. 61–64. [Google Scholar]
- Baevsky, R.M.; Chernikova, A.G. Heart rate variability analysis: Physiological foundations and main methods. Cardiometry 2017, 66–76. [Google Scholar] [CrossRef] [Green Version]
- Cardone, D.; Merla, A. New frontiers for applications of thermal infrared imaging devices: Computational psychopshysiology in the neurosciences. Sensors 2017, 17, 1042. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Filippini, C.; Perpetuini, D.; Cardone, D.; Chiarelli, A.M.; Merla, A. Thermal infrared imaging-based affective computing and its application to facilitate human robot interaction: A review. Appl. Sci. 2020, 10, 2924. [Google Scholar] [CrossRef]
- Engert, V.; Merla, A.; Grant, J.A.; Cardone, D.; Tusche, A.; Singer, T. Exploring the use of thermal infrared imaging in human stress research. PLoS ONE 2014, 9, e90782. [Google Scholar] [CrossRef] [Green Version]
- Cruz-Albarran, I.A.; Benitez-Rangel, J.P.; Osornio-Rios, R.A.; Morales-Hernandez, L.A. Human emotions detection based on a smart-thermal system of thermographic images. Infrared Phys. Technol. 2017, 81, 250–261. [Google Scholar] [CrossRef]
- Perpetuini, D.; Cardone, D.; Bucco, R.; Zito, M.; Merla, A. Assessment of the Autonomic Response in Alzheimer’s Patients During the Execution of Memory Tasks: A Functional Thermal Imaging Study. Available online: https://0-www-ingentaconnect-com.brum.beds.ac.uk/content/ben/car/2018/00000015/00000010/art00007 (accessed on 25 June 2020).
- Puri, C.; Olson, L.; Pavlidis, I.; Levine, J.; Starren, J. StressCam: Non-contact measurement of users’ emotional states through thermal imaging. In CHI’05 Extended Abstracts on Human Factors in Computing Systems; ACM: Portland, OR, USA, 2005; pp. 1725–1728. [Google Scholar]
- Pavlidis, I.; Tsiamyrtzis, P.; Shastri, D.; Wesley, A.; Zhou, Y.; Lindner, P.; Buddharaju, P.; Joseph, R.; Mandapati, A.; Dunkin, B.; et al. Fast by nature-how stress patterns define human experience and performance in dexterous tasks. Sci. Rep. 2012, 2, 305. [Google Scholar] [CrossRef] [Green Version]
- Kang, J.; McGinley, J.A.; McFadyen, G.; Babski-Reeves, K. Determining learning level and effective training times using thermography. In Proceedings of the Army Science Conference, Orlando, FL, USA, 27–30 November 2006. [Google Scholar]
- Stemberger, J.; Allison, R.S.; Schnell, T. Thermal imaging as a way to classify cognitive workload. In Proceedings of the 2010 Canadian Conference on Computer and Robot Vision, Ottawa, ON, Canada, 31 May–2 June 2010; pp. 231–238. [Google Scholar]
- Ebrahimian-Hadikiashari, S.; Nahvi, A.; Homayounfard, A.; Bakhoda, H. Monitoring the variation in driver respiration rate from wakefulness to drowsiness: A non-intrusive method for drowsiness detection using thermal imaging. J. Sleep Sci. 2018, 3, 1–9. [Google Scholar]
- Knapik, M.; Cyganek, B. Driver’s fatigue recognition based on yawn detection in thermal images. Neurocomputing 2019, 338, 274–292. [Google Scholar] [CrossRef]
- Zhang, M.; Ihme, K.; Drewitz, U. Discriminating drivers’ emotions through the dimension of power: Evidence from facial infrared thermography and peripheral physiological measurements. Transp. Res. Part F Traffic Psychol. Behav. 2019, 63, 135–143. [Google Scholar] [CrossRef]
- Yamakoshi, T.; Yamakoshi, K.; Tanaka, S.; Nogawa, M.; Park, S.B.; Shibata, M.; Sawada, Y.; Rolfe, P.; Hirose, Y. Feasibility study on driver’s stress detection from differential skin temperature measurement. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–24 August 2008; pp. 1076–1079. [Google Scholar]
- Pavlidis, I.; Dcosta, M.; Taamneh, S.; Manser, M.; Ferris, T.; Wunderlich, R.; Akleman, E.; Tsiamyrtzis, P. Dissecting driver behaviors under cognitive, emotional, sensorimotor, and mixed stressors. Sci. Rep. 2016, 6, 25651. [Google Scholar] [CrossRef] [PubMed]
- Praveena, M.; Jaiganesh, V. A literature review on supervised machine learning algorithms and boosting process. Int. J. Comput. Appl. 2017, 169, 32–35. [Google Scholar] [CrossRef]
- World Medical Association Declaration of Helsinki: Ethical principles for medical research involving human subjects. JAMA 2000, 284, 3043–3045. [CrossRef]
- City Car Driving—Car Driving Simulator, PC Game. Available online: https://citycardriving.com/ (accessed on 26 June 2020).
- Conover, M.B. Understanding Electrocardiography; Elsevier Health Sciences: St. Luis, MO, USA, 2002; ISBN 978-0-323-01905-7. [Google Scholar]
- Tarvainen, M.P.; Niskanen, J.-P.; Lipponen, J.A.; Ranta-aho, P.O.; Karjalainen, P.A. Kubios HRV—A Software for Advanced Heart Rate Variability Analysis. In Proceedings of the 4th European Conference of the International Federation for Medical and Biological Engineering, Antwerp, Belgium, 23–27 November 2008; Vander Sloten, J., Verdonck, P., Nyssen, M., Haueisen, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1022–1025. [Google Scholar]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Champaign, IL, USA, 2008; ISBN 978-0-596-55404-0. [Google Scholar]
- Filippini, C.; Spadolini, E.; Cardone, D.; Bianchi, D.; Preziuso, M.; Sciarretta, C.; del Cimmuto, V.; Lisciani, D.; Merla, A. Facilitating the child–robot interaction by endowing the robot with the capability of understanding the child engagement: The case of mio amico robot. Int. J. Soc. Robot. 2020, 1–13. [Google Scholar] [CrossRef]
- Baltrušaitis, T.; Robinson, P.; Morency, L.-P. OpenFace: An open source facial behavior analysis toolkit. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–9 March 2016; pp. 1–10. [Google Scholar]
- Amos, B.; Ludwiczuk, B.; Satyanarayanan, M. Openface: A general-purpose face recognition library with mobile applications. CMU Sch. Comput. Sci. 2016, 6, 1–18. [Google Scholar]
- Baltrusaitis, T.; Robinson, P.; Morency, L.-P. Constrained Local Neural Fields for Robust Facial Landmark Detection in the Wild. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Sydney, Australia, 2–8 December 2013; pp. 354–361. [Google Scholar]
- Zhang, K.; Zhang, Z.; Li, Z.; Qiao, Y. Joint Face Detection and Alignment Using Multitask Cascaded Convolutional Networks. IEEE Signal Process. Lett. 2016, 23, 1499–1503. [Google Scholar] [CrossRef] [Green Version]
- Ioannou, S.; Gallese, V.; Merla, A. Thermal infrared imaging in psychophysiology: Potentialities and limits. Psychophysiology 2014, 51, 951–963. [Google Scholar] [CrossRef] [Green Version]
- Vehtari, A.; Gelman, A.; Gabry, J. Practical Bayesian model evaluation using leave-one-out cross-validation and WAIC. Stat. Comput. 2017, 27, 1413–1432. [Google Scholar] [CrossRef] [Green Version]
- Crone, S.F.; Guajardo, J.; Weber, R. A study on the ability of support vector regression and neural networks to forecast basic time series patterns. In Proceedings of the IFIP International Conference on Artificial Intelligence in Theory and Practice, Santiago, Chile, 21–24 August 2006; Springer: Boston, MA, USA, 2006; pp. 149–158. [Google Scholar]
- Dupret, G.; Koda, M. Bootstrap re-sampling for unbalanced data in supervised learning. Eur. J. Oper. Res. 2001, 134, 141–156. [Google Scholar] [CrossRef]
- Zweig, M.H.; Campbell, G. Receiver-operating characteristic (ROC) plots: A fundamental evaluation tool in clinical medicine. Clin. Chem. 1993, 39, 561–577. [Google Scholar] [CrossRef]
- Baltrušaitis, T. Automatic Facial Expression Analysis. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 2014. [Google Scholar]
- Dahliani, E.R.; Rahmatan, H.; Djufri. The correlation between students’ interest and learning outcomes in biology. JPhCS 2020, 1460, 012072. [Google Scholar] [CrossRef]
- Widanti, N.; Sumanto, B.; Rosa, P.; Fathur Miftahudin, M. Stress level detection using heart rate, blood pressure, and GSR and stress therapy by utilizing infrared. In Proceedings of the 2015 International Conference on Industrial Instrumentation and Control (ICIC), Pune, India, 28–30 May 2015; pp. 275–279. [Google Scholar]
- Lacy, C.R.; Contrada, R.J.; Robbins, M.L.; Tannenbaum, A.K.; Moreyra, A.E.; Chelton, S.; Kostis, J.B. Coronary vasoconstriction induced by mental stress (simulated public speaking). Am. J. Cardiol. 1995, 75, 503–505. [Google Scholar] [CrossRef]
- Kim, H.-Y. Statistical notes for clinical researchers: Assessing normal distribution (2) using skewness and kurtosis. Restor. Dent. Endod. 2013, 38, 52–54. [Google Scholar] [CrossRef] [PubMed]
- Pereira, C.B.; Yu, X.; Czaplik, M.; Rossaint, R.; Blazek, V.; Leonhardt, S. Remote monitoring of breathing dynamics using infrared thermography. Biomed. Opt. Express 2015, 6, 4378–4394. [Google Scholar] [CrossRef] [PubMed]
- Widjaja, D.; Orini, M.; Vlemincx, E.; Van Huffel, S. Cardiorespiratory Dynamic Response to Mental Stress: A Multivariate Time-Frequency Analysis. Comput. Math. Methods Med. 2013, 2013. [Google Scholar] [CrossRef] [PubMed]
- Vlemincx, E.; Taelman, J.; Peuter, S.D.; Diest, I.V.; Bergh, O.V.D. Sigh rate and respiratory variability during mental load and sustained attention. Psychophysiology 2011, 48, 117–120. [Google Scholar] [CrossRef]
- Lohani, M.; Payne, B.R.; Strayer, D.L. A review of psychophysiological measures to assess cognitive states in real-world driving. Front. Hum. Neurosci. 2019, 13. [Google Scholar] [CrossRef]
- Hill, J.D.; Boyle, L.N. Driver stress as influenced by driving maneuvers and roadway conditions. Transp. Res. Part F Traffic Psychol. Behav. 2007, 10, 177–186. [Google Scholar] [CrossRef]
- Matthews, G.; Joyner, L.A.; Newman, R. Age and gender differences in stress responses during simulated driving. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 1999, 43, 1007–1011. [Google Scholar] [CrossRef]
- Daanen, H.A.; Van De Vliert, E.; Huang, X. Driving performance in cold, warm, and thermoneutral environments. Appl. Ergon. 2003, 34, 597–602. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City Car Driving Settings | Conditions |
|---|---|
| Weather | • Season: Autumn • Weather condition: Foggy • Time of the day: Daytime |
| Traffic | • Traffic density: 50% • Traffic behavior: Intense traffic • Fullness of traffic: 60% |
| Territory | • Area: New city • Location: Modern district |
| Emergency situations | • Dangerous change of traffic: Often • Emergency braking of the car ahead: Often • Pedestrian crossing the road in a wrong place: Often • Accident on the road: Often • Dangerous entrance of the vehicle into the oncoming lane: Rarely |
| Technical Data | Intel RealSense D415 | FLIR Boson 320 LWIR |
|---|---|---|
| Weight | 4.54 g | 7.5 g without lens |
| Dimensions | 99 × 20 × 23 mm | 21 × 21 × 11 mm without lens |
| Spatial resolution | Full HD 1080p (1920 × 1080) | 320 × 256 |
| Acquisition rate | 30 fps @ 1080p | 30 fps |
| Field of view (FOV) | 69.4° × 42.5° × 77° (±3°) | 92° HFoV 1 |
| Sensors technology | Rolling Shutter, 1.4 μm × 1.4 μm pixel size | Uncooled VOx microbolometer |
| Thermal Sensitivity | - | <50 mK (Professional) |
| Region of Interest (ROI) | ROI Shape | ROI Position Relative to 68 Facial Landmark |
|---|---|---|
| ROI 1—Nose tip | Circle | , d = 7 pixel 1 |
| ROI 2—Right nostril | Circle | , d = 7 pixel 1 |
| ROI 3—Left nostril | Circle | , d = 7 pixel 1 |
| ROI 4—Glabella | Polygon | Polyline ([P22, P23, P28]) 2 |
| Subject ID | Success (%) | Confidence |
|---|---|---|
| Subject 01 | 100.00 | 0.93 |
| Subject 02 | 99.87 | 0.98 |
| Subject 03 | 77.90 | 0.76 |
| Subject 04 | 99.97 | 0.98 |
| Subject 05 | 70.54 | 0.66 |
| Subject 06 | 98.94 | 0.96 |
| Subject 07 | 99.87 | 0.91 |
| Subject 08 | 99.80 | 0.93 |
| Subject 09 | 99.86 | 0.97 |
| Subject 10 | 99.81 | 0.96 |
| Conditions | NO STRESS | STRESS |
|---|---|---|
| NO STRESS | 78% | 22% |
| STRESS | 23% | 77% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cardone, D.; Perpetuini, D.; Filippini, C.; Spadolini, E.; Mancini, L.; Chiarelli, A.M.; Merla, A. Driver Stress State Evaluation by Means of Thermal Imaging: A Supervised Machine Learning Approach Based on ECG Signal. Appl. Sci. 2020, 10, 5673. https://0-doi-org.brum.beds.ac.uk/10.3390/app10165673
Cardone D, Perpetuini D, Filippini C, Spadolini E, Mancini L, Chiarelli AM, Merla A. Driver Stress State Evaluation by Means of Thermal Imaging: A Supervised Machine Learning Approach Based on ECG Signal. Applied Sciences. 2020; 10(16):5673. https://0-doi-org.brum.beds.ac.uk/10.3390/app10165673
Chicago/Turabian StyleCardone, Daniela, David Perpetuini, Chiara Filippini, Edoardo Spadolini, Lorenza Mancini, Antonio Maria Chiarelli, and Arcangelo Merla. 2020. "Driver Stress State Evaluation by Means of Thermal Imaging: A Supervised Machine Learning Approach Based on ECG Signal" Applied Sciences 10, no. 16: 5673. https://0-doi-org.brum.beds.ac.uk/10.3390/app10165673