1. Introduction
Potato is one of the major sources of nutrition for the global population. Northeast China is the primary production region of potatoes in China. The soil in this area contains many clays, high organic matter and high water content, which are good for potato growth. However, the clay in soil increases the stickiness of soil and causes increased resistance when digging potatoes. The ordinary plane digging shovels are commonly used as potato harvesters in Northeast China. However, the substantial soil adhesion to the potato-digging shovel leads to a significant increase in drag resistance, which greatly increases the energy consumption of the tractor and reduces economic benefits to the farmers because of the clay in soil. Therefore, reducing the soil adhesion and drag during digging potatoes in clay soil is of great importance.
For the potato digging shovels, the tillage depth is generally approximately 25 cm. The structural size and shape are generally fixed for a certain potato digger because it is necessary to ensure the working width. Compared with soils in other regions, when harvesting potatoes in clayey soil, the moisture content is generally higher, and the high clay content leads to substantial soil adhesion. Hence, the reason for the resistance is soil adhesion to the digging shovels. Therefore, it would be helpful to design a potato-digging shovel with antiadhesion properties and drag reduction for use in the clayey soil region.
Conventional antiadhesion and drag reduction methods primarily include aeration, liquid filling, thermal desorption, vibration [
1,
2], electroosmosis, and mechanical and surface modification [
3,
4]. These methods can reduce the tillage resistance to some extent. However, due to the problems such as poor wear resistance, complicated processing technology, excessive auxiliary parts and additional energy loss, these methods have encountered difficulties during their application.
Bionics is an effective interdisciplinary field that addresses the principles underlying the structure and function of living things in nature and involves the invention of new equipment, tools and technology based on these principles to create useful technologies for production and life. In recent years, scholars have generated many excellent results for various engineering applications, especially for reducing soil tillage, because their bionic structures have the ability to reduce adhesion and friction against the soil [
3,
5] conducting a large number of experimental studies to discover that some soil animals are inherently capable of reducing soil adhesion. Soil animals such as dung beetles, earthworms and pangolins, etc. move freely in clayey soil without soil adhesion, due to their special nonsmooth surface structure [
5,
6]. Ren et al. [
3] designed a bionic nonsmooth plow based on the nonsmooth surface structure of soil animals. The bionic plow with the bionic nonsmooth surface structure could reduce the specific resistance of the plowing operation, improve the soil and cover effect, and significantly improve the economic benefits of the plowing operation. Zhang et al. [
7] integrated the microconvex structure of shark scales and lotus leaves, and then designed a bionic ridge shovel with antiadhesion properties and reduced resistance. Zhang et al. [
8] designed a bionic bulldozing plate inspired by the pleated body surface structure of earthworms. Tong et al. [
5] and Ren et al. [
4] invented the bionic wear-resistant plow blade, subsoiler blade, furrow opener and bionic rotary tiller blade according to the drag reduction property of the claws on animals such as the field mouse, mole cricket, dung beetle and mole. Bionic research on pangolin scales is primarily based on the wear resistance of the pangolin scale structure. However, the application research of antiadhesion and reducing resistance is rarely reported [
9,
10].
In summary, for the bionic resistance reduction of tillage components, the most commonly used bionic prototype was the rough claw of soil animals [
11]. Its primary application fields are drag reduction and wear resistance. The application targets are the subsoiler, opener, bulldozer and similar implements.
At present, there are few reports in the literature about drag reduction of potato digging in other countries. Domestic research on potato harvesters mainly focuses on the design and structural optimization of the whole machine. Various types of potato harvesters have been developed, but the research on potato digging for drag reduction has just started. Aiming at the problem of excessive resistance of potato digging under sandy loam soil in the Northwest China, Zhao et al. [
1] designed a potato bionic digging shovel based on the contour of the mole cricket’s claws, and obtained the conclusion that the use of bionic technology can achieve drag reduction. For solving the problem that the shovel of the cassava harvester has difficulty entering the soil during the harvesting process, a bionic digging shovel was designed by Liao et al. [
2] based on imitating the shape of the toe claws of the oriental mole cricket, and the structure and strength were analyzed. In southern China, the traditional potato digging shovel could not leak soil well during the operation process, which caused great digging resistance. To deal with that problem, Zhao et al. [
3] designed a bionic digging shovel based on the wild boar’s arch nose structure by reverse engineering technology. Statics analysis of the bionic shovel was carried out and the results show that, under the same preset conditions, the stress and deformation of the bionic digging shovel are the smallest compared with the traditional shovel, which has a certain reference value. Li et al. [
4] designed a bionic digging shovel based on the front paws of mole crickets as a bionic prototype. Its drag reduction characteristics were studied by discrete element method (DEM). The results show that the bionic digging shovel has better digging performance than traditional shovels. However, there is no relevant design or research on bionic applications of the potato digging shovel for clayey soil in Northeast China.
The application of physical or field tests for designing agricultural machinery components is not the first choice because it will result in a significant increase in the cost and length of the designing cycle [
12]. During the design and optimization of modern soil tillage tools, the simulation of the interaction between the tools and the soil has usually been performed by using computer software for the first step. Discrete element method (DEM) is a numerical method used to model the mechanical behavior of granular materials. It is especially suitable for numerical methods that simulate the dynamic behavior of granular media [
13,
14].
Due to its unique advantages, the discrete element method has been used by many researchers to design soil tillage components [
15,
16,
17,
18]. Li et al. [
19] designed a serials of subsoiling tools by mimicking the features of bear claws, and they developed a numerical model to simulate the interaction between the bear claw and soil using DEM. Sun et al. [
20] used a Hertz–Mindlin (no slip) model in EDEM (Engineering Discrete Element Method; software for bulk material simulation) to simulate and analyze the interactions between the bionic subsoilers which were inspired by the placoid scale rib structure of shark skin and the soil. It is worth mentioning that the Hertz–Mindlin (no slip) model is not the best choice for simulating soil.
At present, for the discrete element model of soil particles, researchers primarily use the embedded model based on Hertz–Mindlin in the EDEM software to model and simulate soil particles. Ucgul et al. [
13,
15,
17,
21,
22,
23] used the Hertz–Mindlin and hysteretic spring contact models to study the stress and plastic deformation of soil particles in the presence of cohesive force and noncohesion. Ding et al. [
24] used the Hertz–Mindlin with bonding model in the EDEM software to establish a discrete element model of deep scarification tillage for paddy soil. It is notable that the Hertz–Mindlin with bonding model is particularly suitable for simulating concrete and rock. Wang et al. [
25] based their work on the proxy model method, using the Edinburgh elastoplastic cohesion model (ECM) to represent the soil particle contact model. ECM is a nonlinear model widely used that accounts for soil strain hysteresis, cohesion and van der Waals forces. It is suitable for studying the compression problems of soil and organic materials. The Hertz–Mindlin with JKR (Johnson–Kendall–Roberts) cohesion model is a cohesive contact model. Based on the Hertz contact theory and the JKR theory [
26], the contact model accounts for the influence of the inter-wet-particle adhesion force on the particle motion. It is especially suitable for simulating materials that are clearly bonded and agglomerated due to moisture, such as crops and wet soil [
27,
28,
29].
In this paper, the bionic structural elements, i.e., the scalelike units (S-U), were initially applied to the potato digging shovel, inspired by pangolin scales. A new type of bionic potato digging shovel was designed based on bionics theory. The digging shovels with bionic structure, the drag reduction and the performance of the bionic potato digging shovels were simulated using the Hertz–Mindlin with JKR model in the EDEM software, which was used to simulate clay soil with high water content. The three primary indicators, namely, the total force, draft force and compress force, were used to characterize the drag reduction performance of the digging shovel. Discrete element method simulations were performed for a bionic shovel and an ordinary plane shovel, respectively. The effects of the biomimetic structural parameters as well as the transversal and longitudinal arrangement spacing on the antiadhesion and drag reduction performance of the potato digging shovel under clayey soil conditions are discussed.
The primary objective of this study was to determine if the bionic potato digging shovel inspired by pangolin scales could improve the antiadhesion and drag reduction performance in clay soil conditions in comparison to the ordinary plane digging shovel. The specific objectives were: (1) determine design parameters for the bionic structures of pangolin scales through theoretical analysis, (2) determine the scalelike units’ structure with anti-soil-adhesion and drag reduction performance through the combination of simulations and physical tests, (3) obtain a suitable range of bionic drag reduction structure parameters and their arrangement spacing for engineering applications, and (4) provide the necessary structural parameters for the further optimized design of the subsequent bionic digging shovel.
2. Materials and Methods
2.1. Theoretical Analysis on the Anti-Soil-Adhesion Mechanism of the Unsmooth Surface
Studies [
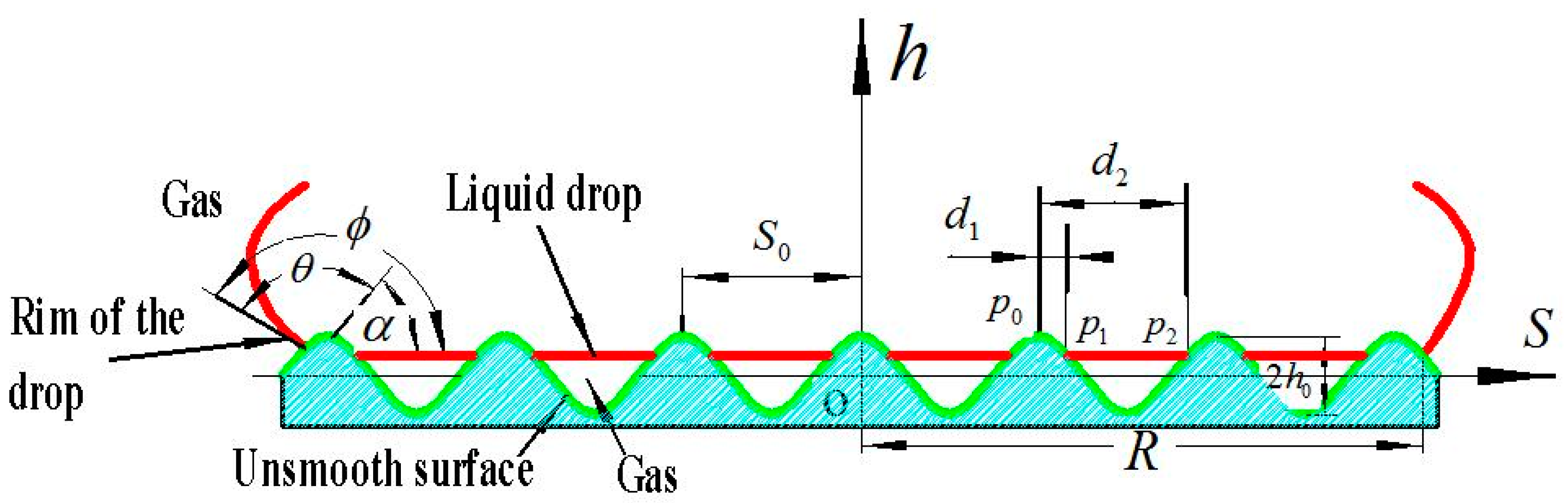
5] have shown that the nonsmooth surfaces of soil animals, whether convex domes or scaly, have a corrugated cross section (
Figure 1), which is the common feature.
Here, ϕ is the apparent contact angle; θ is the intrinsic contact angle; and α is the slope angle of the unsmooth wave curve at the rim of the drop (the rim is the profile of wave in the cross section); S0 and h0 are the period and the amplitude of the wave, respectively; S, h, and o are the axes and the origin of the cylindrical coordinates, respectively; p1 and p2 are the points of intersection between each ringlike strip of the gas–liquid interface and its two adjacent waves; p0 is the ridge of the wave near the origin in the above two adjacent waves; d1 and d2 are the distances from p1 to p0 and from p2 to p0, respectively; S0 is the period of the wave; R is the radius of the interface between the liquid drop and the unsmooth surface; and S, h, and o are the axes and the origin of the cylindrical coordinates, respectively.
As Jia [
30] described, the equation for the cross section of the unsmooth surface through the origin is
The conditions for forming a composite interface between a liquid and a nonsmooth surface (
Figure 1) are [
31] as follows:
where
α is the slope angle of the unsmooth wave curve at the rim of the drop.
Equation (4) suggests that the larger the value of
h0/S0 is, the larger the value of |
α|; therefore, given the relationship between
θ and |
α|, the larger the value of |
α| is, the smaller the value of
θ. Hence, for the unsmooth surface, the larger the value of
h0/S0 is, the larger the apparent contact angle of liquid drop
∅, the stronger their hydrophobicity, the easier the formation of composite interface between the soil and the unsmooth surfaces, and the better the ability to reduce soil adhesion. These properties indicate that the larger the value of
h0/S0 is, the easier the formation of the composite interface.
Figure 1 indicates that, after the composite interface forms, the real contact area between the soil and the unsmooth cuticles will decrease, and some of the contact area is replaced by the interface between the soil and the gas. Clearly, soil adhesion will decrease greatly [
30].
According to the water film tension theory of soil adhesion [
32], the formation of the composite interface can significantly reduce the contact area between the soil’s water and the nonsmooth surface on the contact surface, which is beneficial to the antiadhesion and drag reduction of soil animals. When the composite interface forms, the apparent contact angle
∅ and the intrinsic contact angle
θ can be expressed as [
33]:
where
r’ is the ratio of the real contact interface area between the soil and the rough surface to the projected area of the rough surface and
η is the ratio of the contact interface area between the liquid and the gas under the liquid drop to the projected area of the rough surface.
Figure 1 shows that the shape of the gas–liquid interface is a ringlike strip. Each ringlike strip interface and its two adjacent waves intersect at
p1 and
p2, and the ridge of the adjacent wave near the origin is denoted by
p0. The distances from
p1 to
p0 and from
p2 to
p0 are
d1 and
d2, respectively. Correspondingly,
m1 and
m2 are the ratios of
d1/S0 and
d2/S0, respectively. Therefore, the width parallel to the S axis of each strip is (
m2-
m1)∙
S0. The total area of all the strips shows the area occupied by the gas–liquid interface. Therefore, the area of the gas–liquid contact interface under the liquid drop is
where
Ag1 is the interface area between the gas and the liquid at the composite interface,
n is the
nth wave, and
N is the number of waves covered by the liquid drop.
The projected area of the rough surface
Ap is
Hence, according to the definition of
η,
η can be expressed as
The real contact interface area between the soil and the rough surface can be calculated as follows:
Thus, from Equations (11) and (12), we can obtain
Substituting Equations (12) and (13) into Equation (9),
Based on the definition of
r’, Equations (7) and (14),
Therefore, Equation (16) shows that the larger the value of
h0/S0 is, the larger the
an, and the larger the value of
r’ as well (see Equation (15)). Equation (5) can be used to find that the influence of the
r’on the apparent contact angle
∅ is similar to that of
r in cos
∅ =
rcos
θ [
34], where
∅ is the apparent angle of the drop on the rough surface,
θ is the intrinsic angle of the drop on the rough surface, and
r is the roughness factor of the surface, which equals the ratio of the real area of the rough surface to the projected area of the rough surface. The value of
r should be larger than 1.
For the unsmooth cuticles of soil animals, the larger the ratio of the wave amplitude to the wave period (h0/S0) is, the larger the apparent contact angle of the liquid drop (∅), the easier the formation of a composite interface between the soil and the unsmooth cuticles, and the better the ability to reduce soil adhesion.
From the above theoretical analysis, during the bionic design of the potato digging shovels, the height of bionic structure h (which corresponds to h0) and the spacing of its arrangement Si (which corresponds to S0) are the key parameters for designing bionic drag reduction performance tools.
2.2. Structural Design of Bionic Potato Digging Shovel
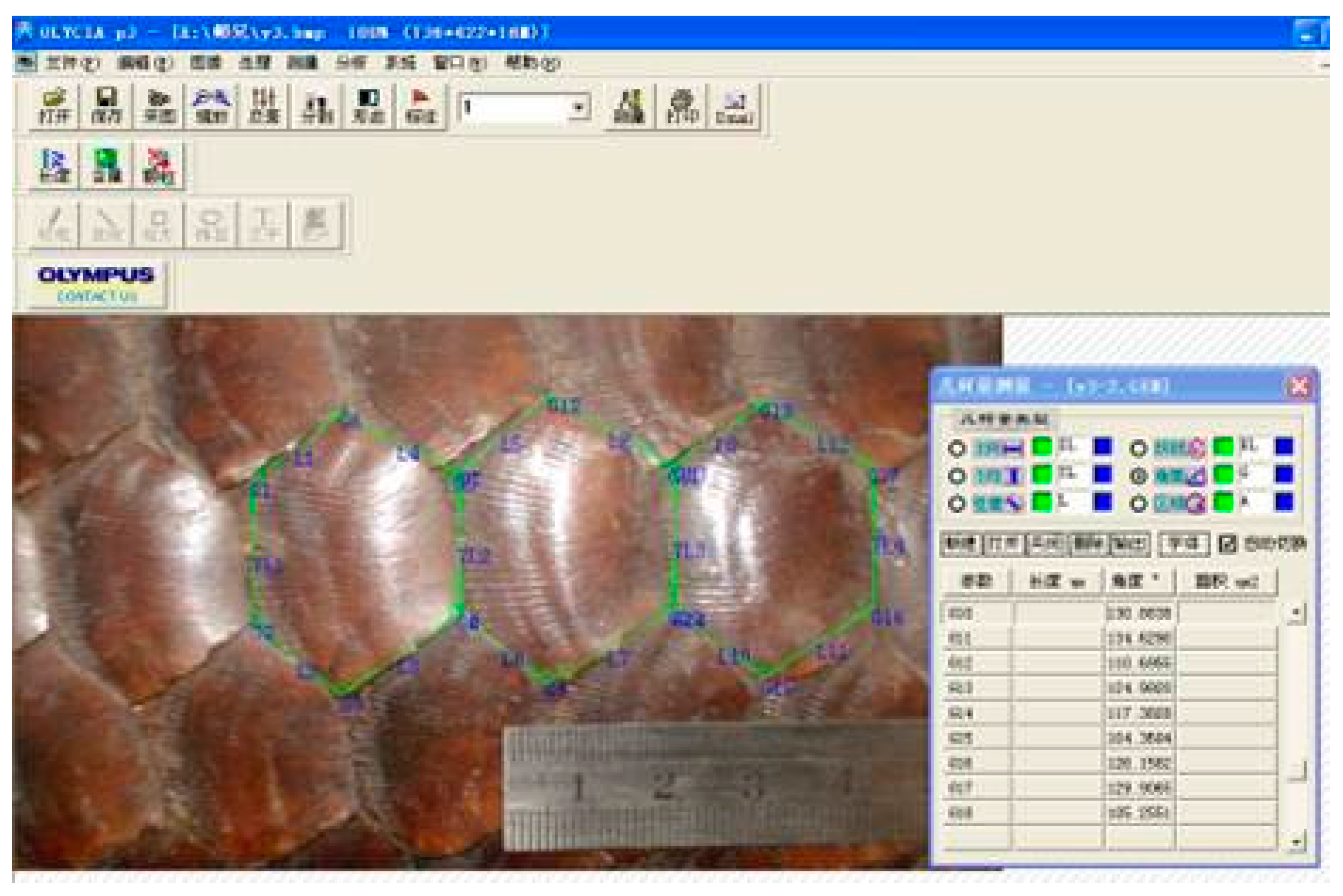
The pangolin is a typical soil animal. The scalelike unit structure of the pangolin can achieve effective drag reduction. According to the results of previous work by our research group [
9,
10], the bionic digging shovel inspired by the structure of pangolin scale units (
Figure 2) were designed (labeled S-U-S) according to the structure and scale of pangolin scales. Besides, an ordinary plane shovel (labeled O-P-S) was designed as the comparison and the outline structure of the O-P-S is shown in
Figure 3.
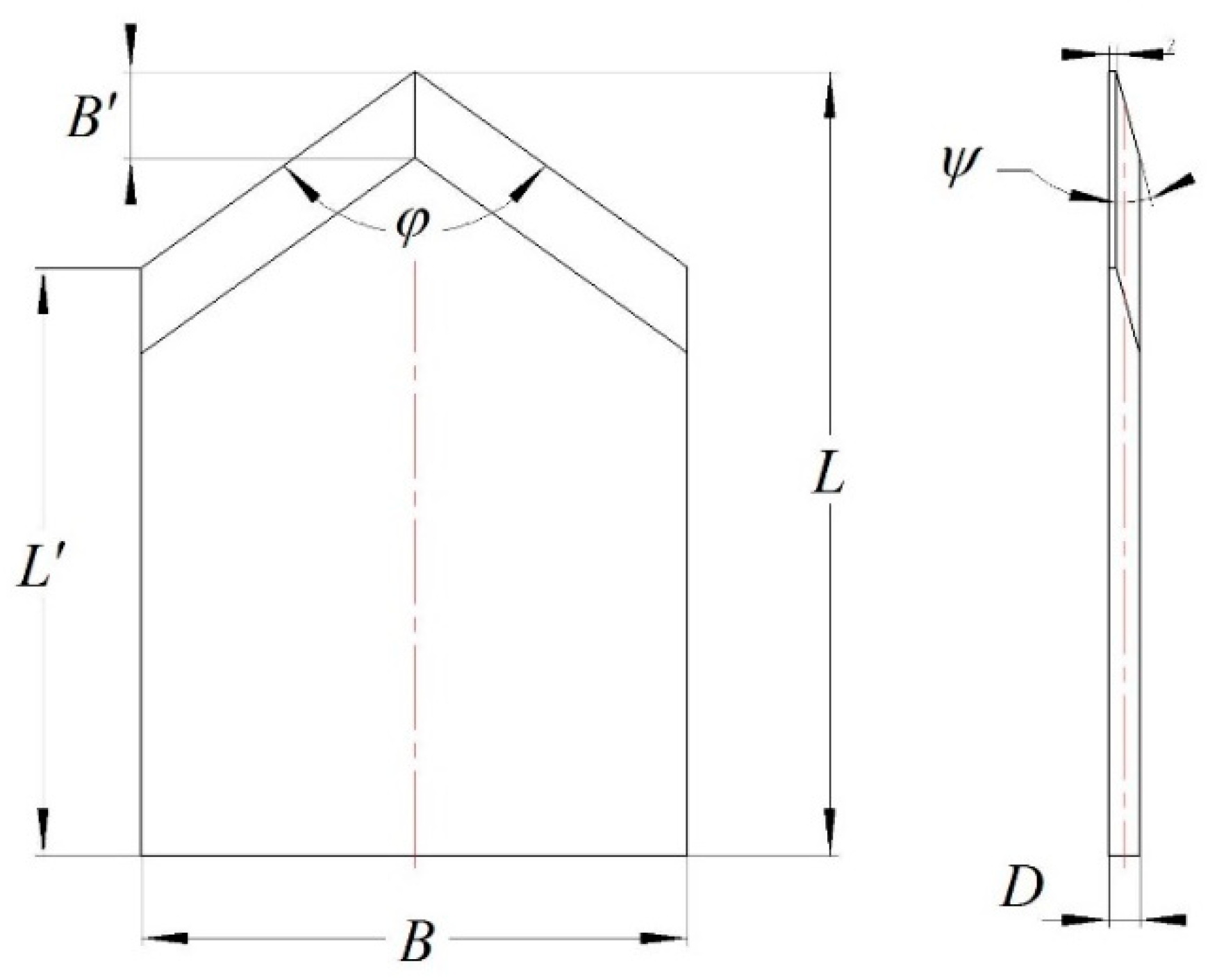
Based on a theoretical analysis of the anti-soil-adhesion mechanism, the height (
h) of the bionic structure and its arrangement spacing (
Si) are the critical design parameters that affect the drag reduction performance of the potato digging shovel. As shown in
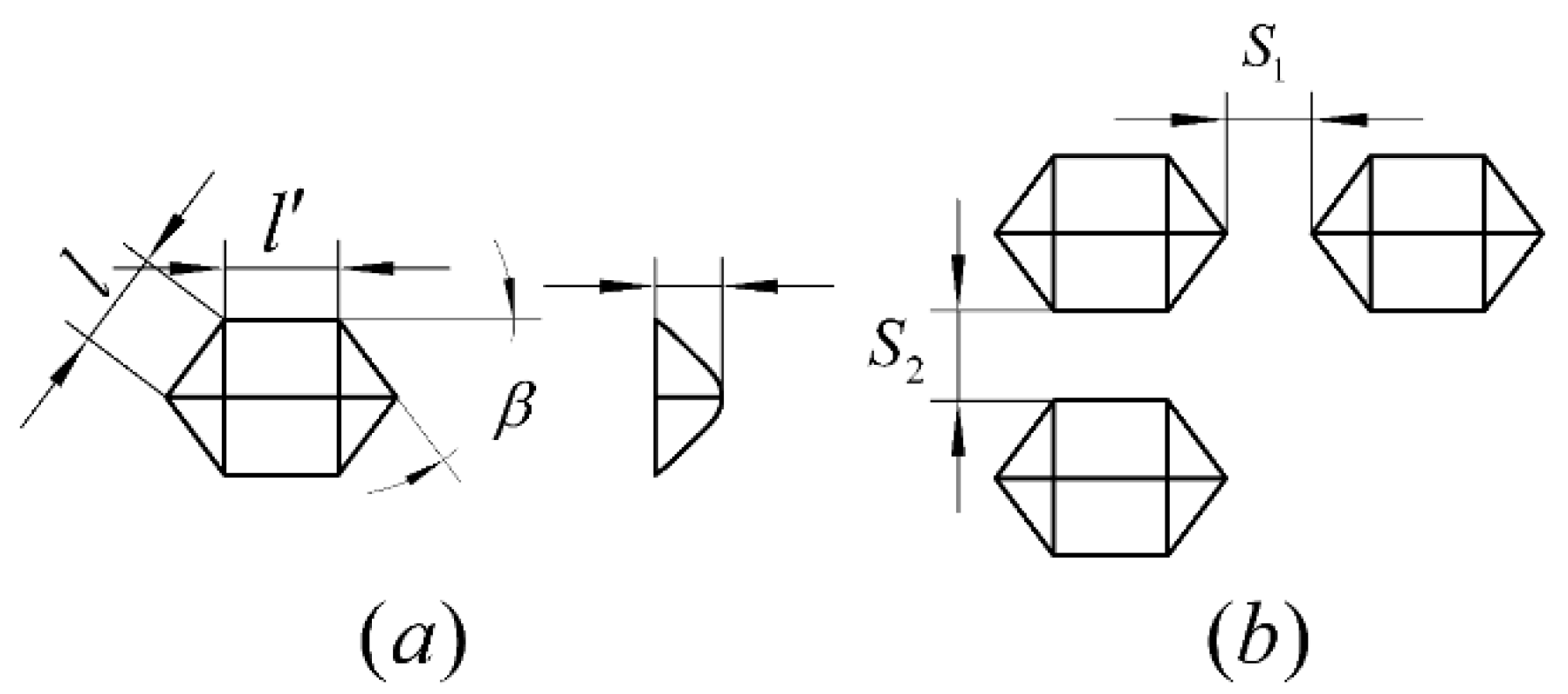
Figure 4, the bionic shovel was designed by a similar theory. The primary design parameters of the scalelike unit are the length (
l) or (
l’), height (
h) and side angle (
β), as shown in
Figure 4. In this paper, the length (
l) and the height (
h) are used as the structural design variables.
Here,
l’/
l = 1.175,
β = 53° (
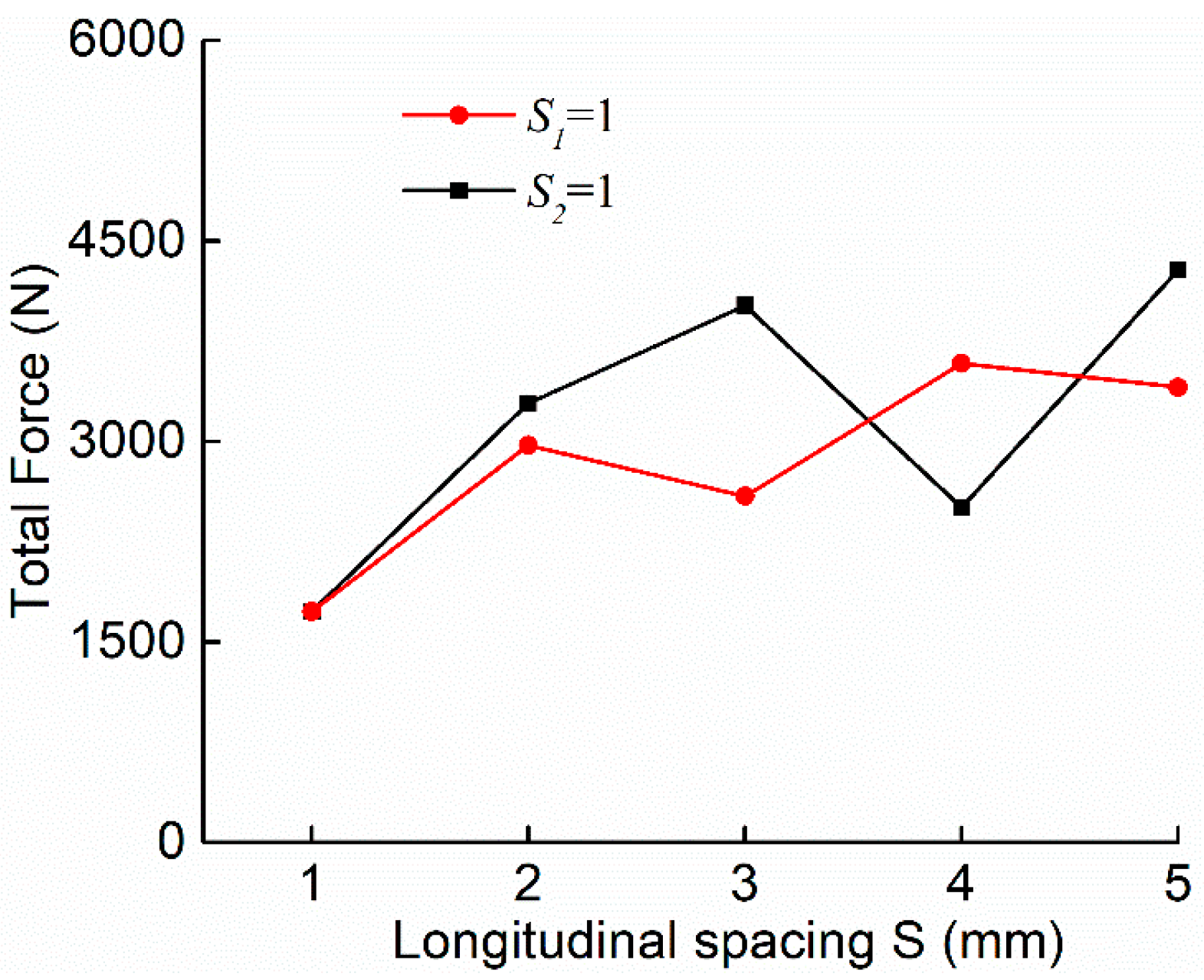
Figure 4). The bionic shovel with the bionic scalelike unit structure was designed by arranging the unit structures on the soil-contacting surface of the potato digging shovel. The arrangement parameters are the transversal spacing
S1 and longitudinal spacing
S2, as shown in
Figure 4b.
2.3. Selection of Clayey Soil Particles Model for DEM
The Hertz–Mindlin (no slip) contact model in the EDEM software is too simple to use when using DEM to simulate the movement of soil particles. Because this contact model only considers the rigid contact of the particles similar to the contact of two steel balls, it is obviously not suitable for simulating soil particles. Particularly in the potato-growing areas of Northeast China, the tilled soil is sticky and agglomerates easily. This soil often adheres to the surface of potato digging shovels. The “Hertz–Mindlin with JKR” contact model is based on the JKR theory, considers the influence of the inter-wet-particle adhesion force on the particle motion law. It is a cohesive force contact model, which is suitable for simulating materials with obvious adhesion and agglomeration due to static electricity, moisture, etc., such as crops and wet soil [
28]. The parameters for the contact model were based on the data in the literature, as listed in
Table 1.
2.4. Design of Simulation Experiments
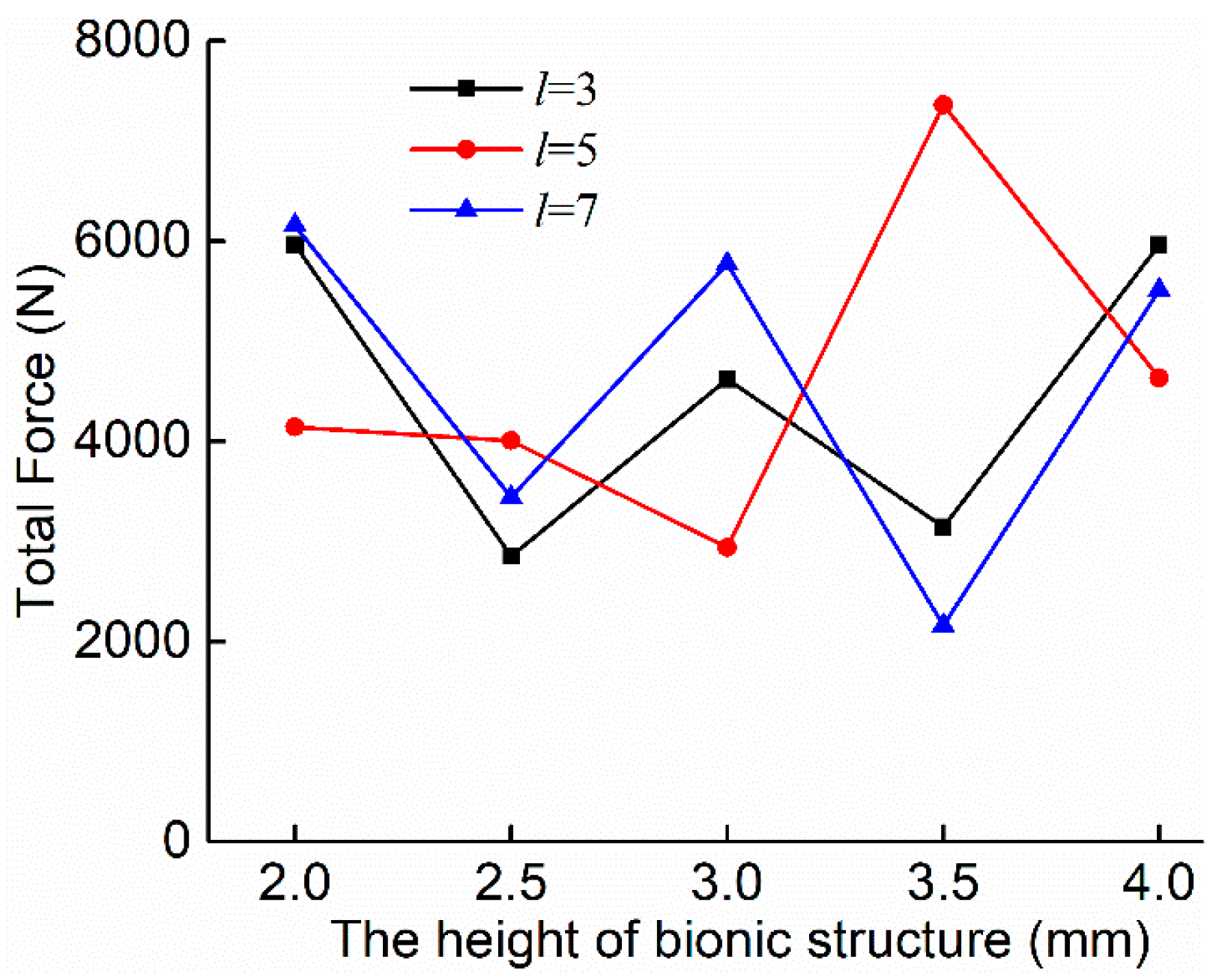
There are four primary design variables for the bionic potato digging shovel, i.e., the length l, height h, and arranged spacing Si (i = 1, 2) of the bionic structure. Each variable can have multiple levels. That design will lead to a large number of trials for a fully aligned combination design, which greatly increases the simulation workload. Among the influencing factors of the reduction of tillage resistance, the influence of the bionic structural parameters on the tillage resistance is significantly greater than that of the arrangement spacing. With the best drag reduction biomimetic structure parameters (l, h), if the shovel with the arrangement spacings (S1, S2) does not reduce the resistance, then, for the bionic structural parameters (l, h) with non-resistance-reduction, which are under the same arrangement spacing combination (S1, S2), it should be non-resistance-reduction as well. This factor finding order can reduce unnecessary simulations. Hence, a preliminary simulation experiment was performed in this paper by using the control variables and parallel comparison methods. The specific method was as follows. First, we set a uniform arrangement spacing and then, studied the effect of the biomimetic structure parameters l and h on the drag reduction performance. The biomimetic structural parameters with the optimal drag reduction performance were obtained through simulations. Then, assuming that the optimal drag reduction structure is known, the influence of the arrangement of the bionic structure on the drag reduction performance was simulated. Finally, the structural parameters and the arrangement spacing parameters with the best drag reduction performance were obtained. Hence, the effects of the biomimetic structural parameters as well as the transversal and longitudinally arranged spacings on the drag reduction performance of potato digging shovel under clayey soil conditions were discussed. The purpose was to obtain a suitable range of the bionic drag reduction structure parameters and their arrangement spacing, which provided basic parameters for subsequent design optimization and physical experiment. The engineering application range of the parameters and the range of optimization parameters are given.
First, the arrangement spacing between the scalelike unit structures was set as
S1 =
S2 = 1 mm. The parameters for length
l and height
h were set as the design variables. Thus, the effects of the bionic structure on the drag reduction performance were compared. The design of the simulations for the S-U-S are listed in
Table 2.
Second, after the previous simulations on the basis of the first step, the optimal solution for drag reduction regarding the height and length parameters of the scalelike unit structure can be obtained. Then, on the basis of the determined bionic structure, the simulations were performed by designing the spacing variable. At last, the optimal simulation result of the drag reduction was the final result for the parallel comparison with other biomimetic structures.
2.5. Identification Experiemts
Through the above simulation test, the best drag reduction bionic structure is obtained, and the physical sample is manufactured according to the bionic structure. The drag reduction performance of the bionic digging shovel was verified by the soil bin test and the field test.
2.6. Soil Bin Test
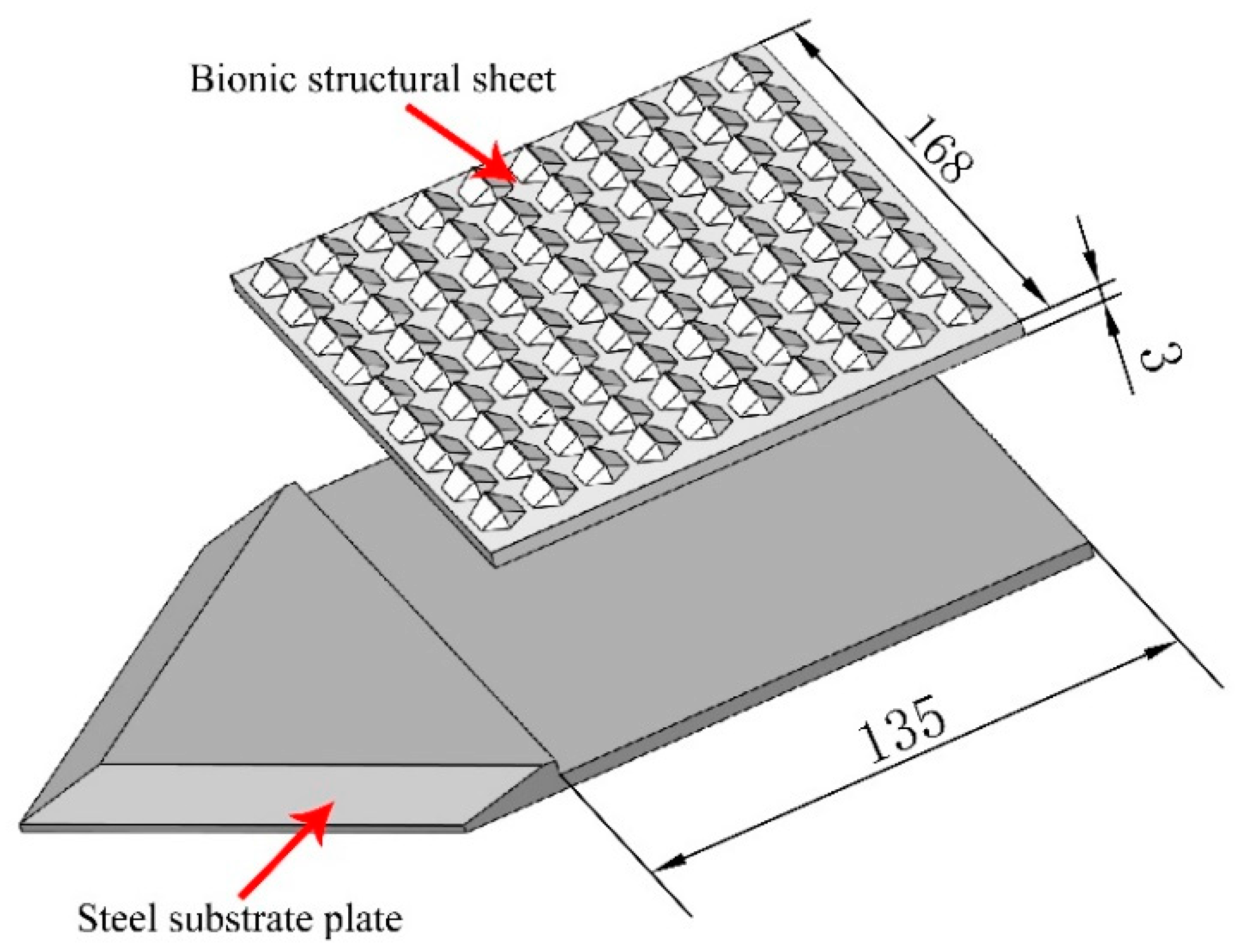
To verify the drag reduction performance of the bionic digging shovel preliminarily, a bionic digging shovel of the S-U-S-
l7
h3.5 which the
l and
h of the bionic structure was 7 mm and 3.5 mm respectively, with arranged spacing of
S1 =
S2 = 1 mm was prepared and the O-P-S was used as a comparison. The O-P-S was manufactured by a numerical control machine (CNC) machine tool and its material was 40MnB or 45 steel, as shown in
Figure 5. The bionic shovel was obtained as follows. (1) A flat shovel of the same size as the O-P-S was set as the substrate and machined by a steel plate. In the area where the bionic structural sheet is placed on the substrate plate, a flat-bottomed groove with measuring 135 mm × 168 mm × 3 mm was cut by a CNC machine. (2) A bionic structural sheet (135 mm × 168 mm × 6.5 mm) with pangolin scale structures was manufactured by 3D printing. (3) The steel substrate plate and the bionic structural sheet were joined by bolts and cementing. The process is shown in
Figure 6.
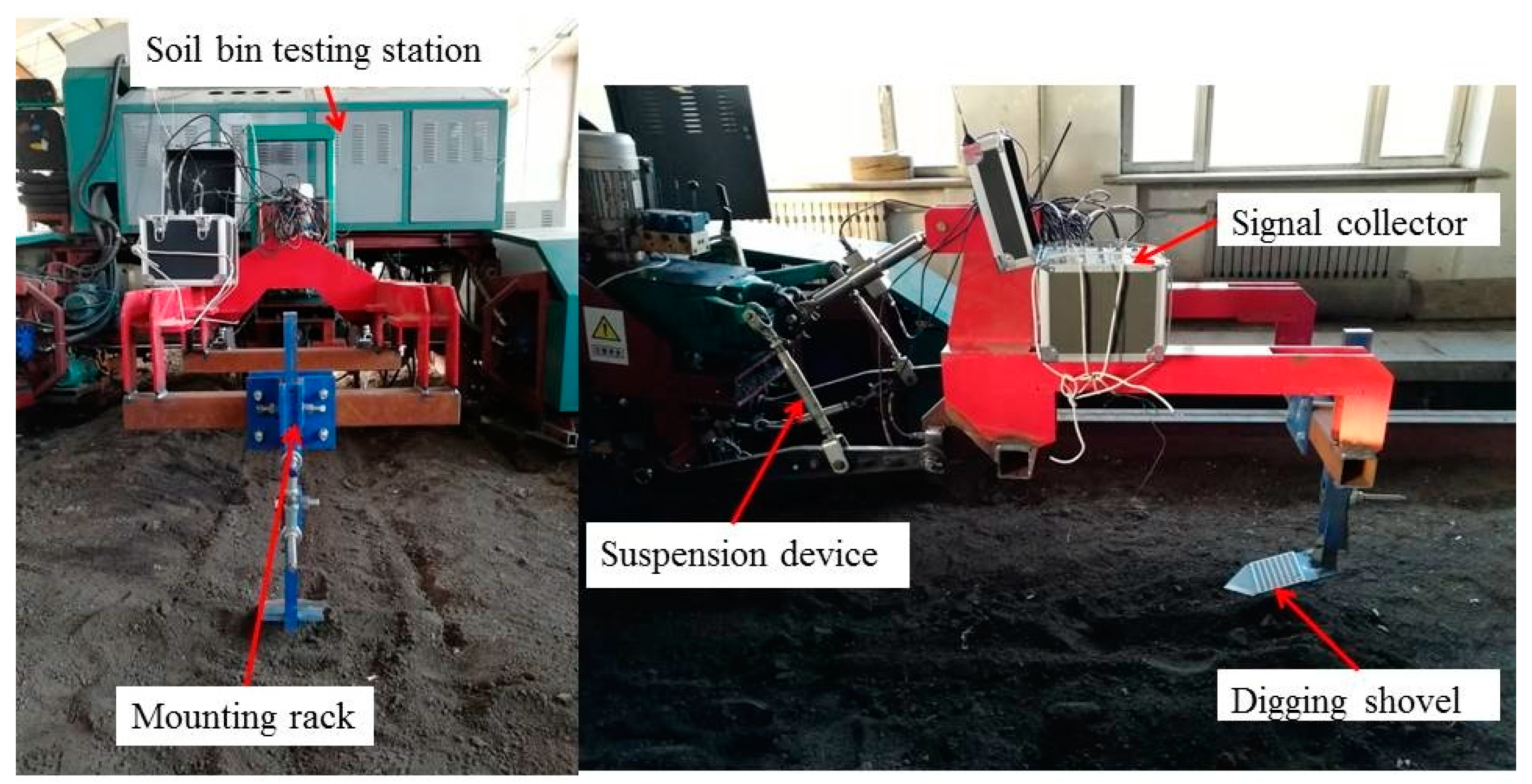
The soil bin test platform is shown in
Figure 7. The entire verification test was performed at the soil bin laboratory in the Heilongjiang Agricultural Machinery Engineering Research Institute in Heilongjiang Province, China. The testing parameters are listed in
Table 3.
2.7. Field Verification Experiment
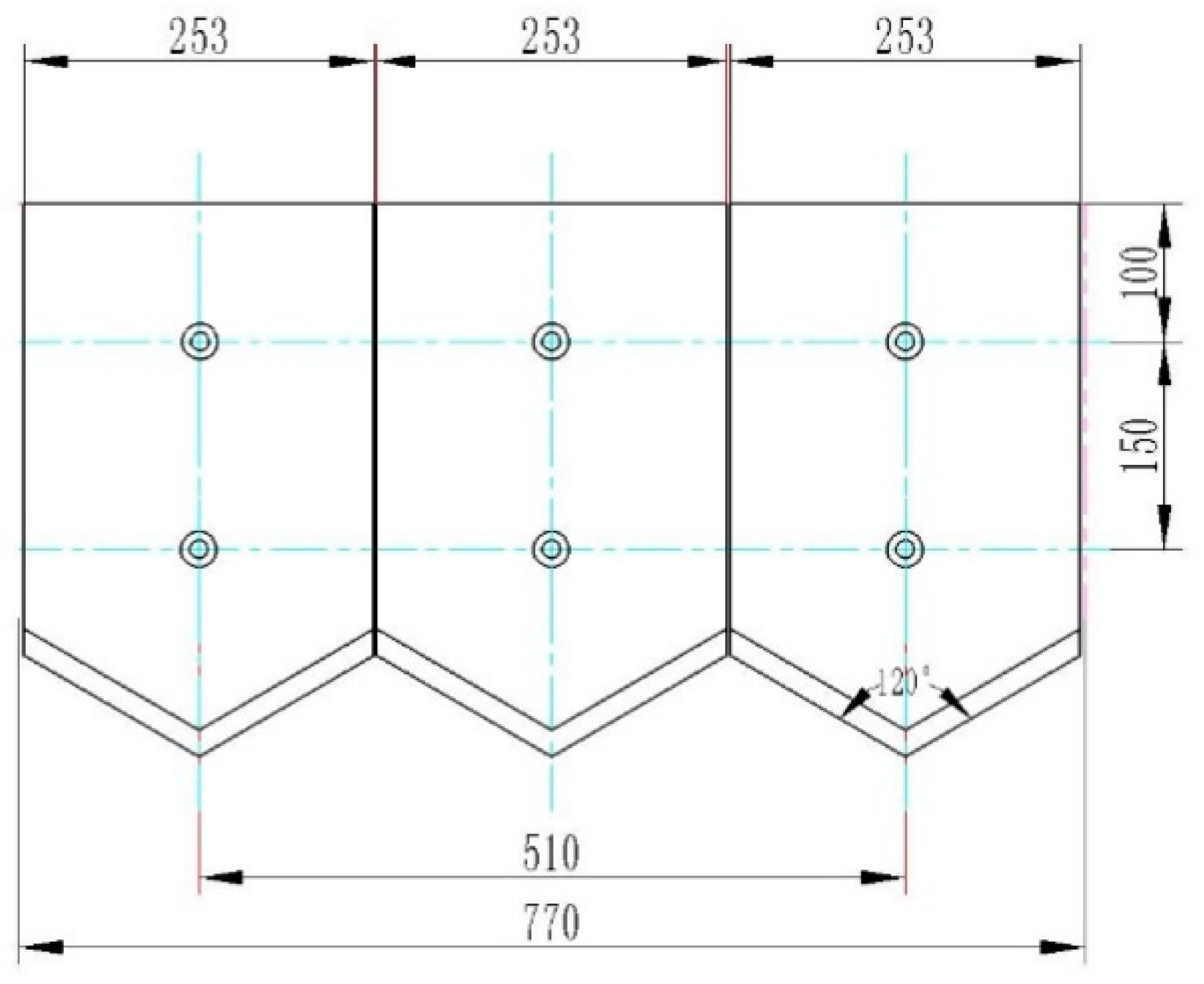
To verify the drag reduction performance of the bionic shovel, a field performance verification was conducted. The experimental field was the potato planting field at Heilongjiang Agricultural Machinery Engineering Research Institute. To match the existing potato digger, the digging shovel needed to be redesigned. The potato excavation device used for the field trial was a 4MLS-2.2 single-row potato excavator, and the working width was 800 mm. One device was equipped with three shovels and each shovel measured 400 mm × 253 mm × 8 mm. The 2D design drawing and its installation style are shown in
Figure 8.
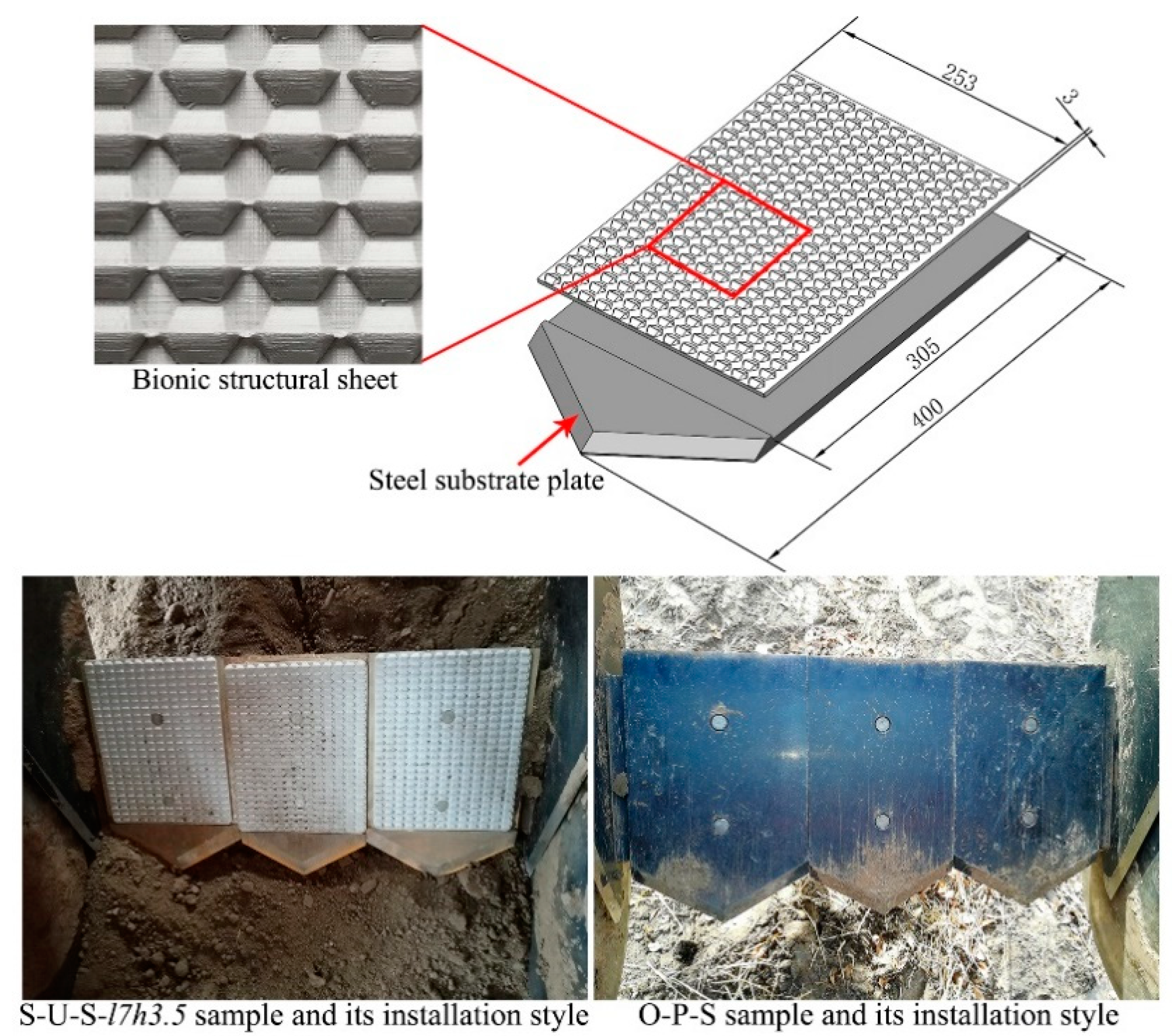
The O-P-S was manufactured by a CNC machine tool and its material was 40MnB or 45 steel. The bionic shovel was obtained as follows. (1) A flat shovel of the same size with the O-P-S was set as the substrate, which was machined by a steel plate. In the area where the bionic structural plate is placed on the substrate steel plate, a flat-bottomed groove measuring 305 mm × 253 mm × 3 mm was cut by a CNC machine. (2) A bionic structural sheet (305 mm × 253mm × 6.5 mm) with a plurality of pangolin scale structures was obtained by 3D printing. (3) The steel substrate plate and the bionic structural sheet were joined by bolts and cementing. This process is shown in
Figure 9.
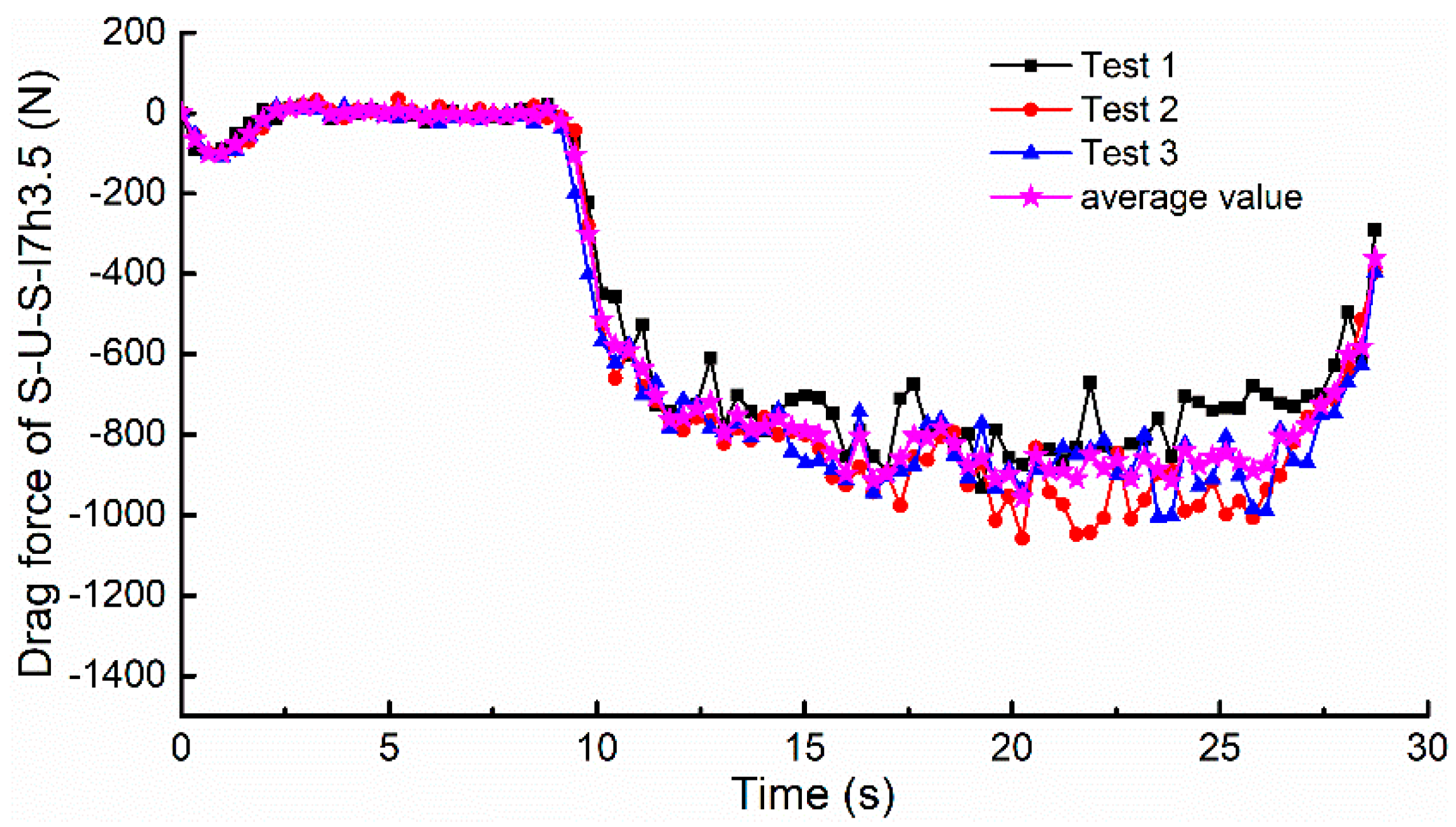
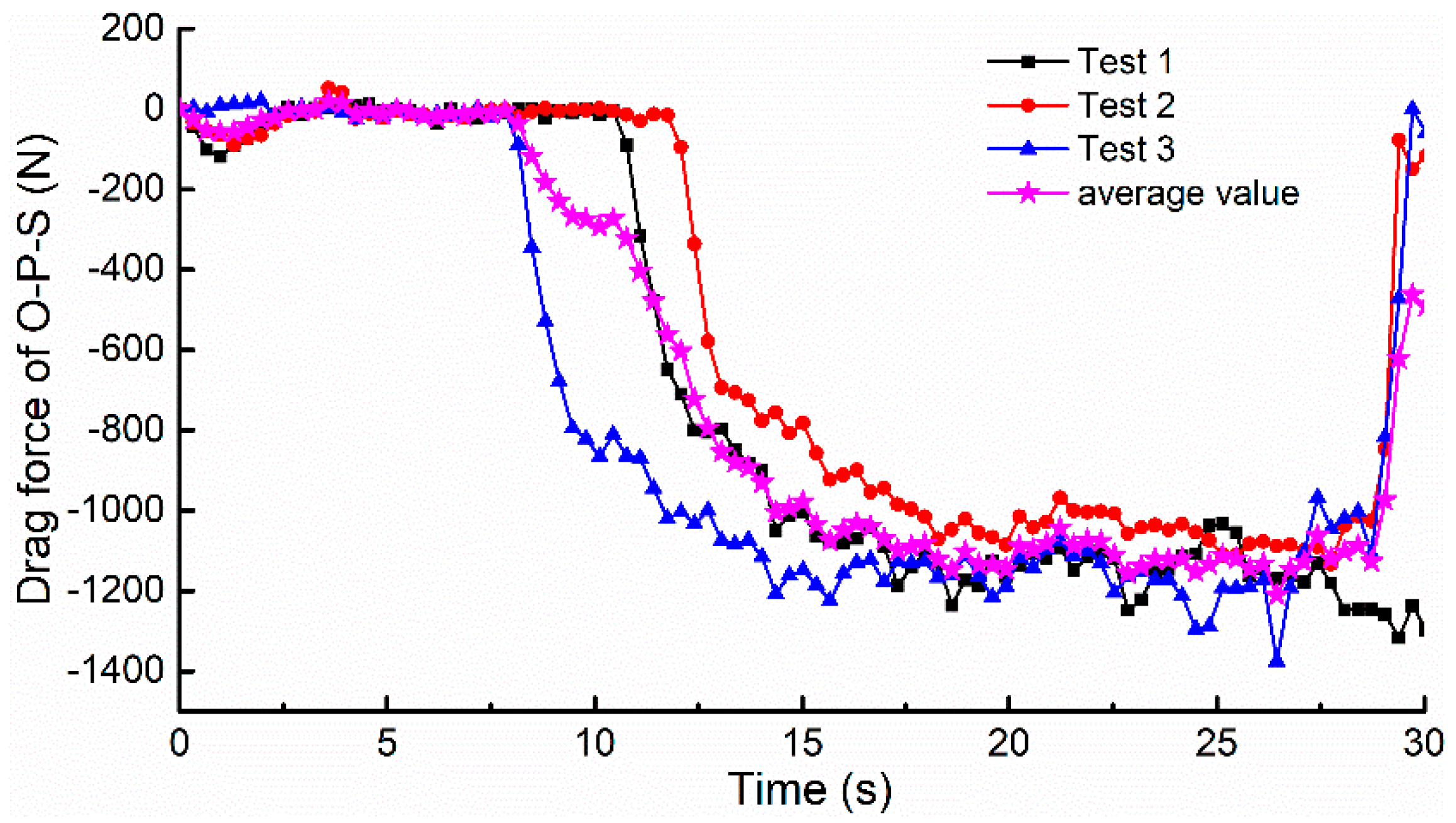
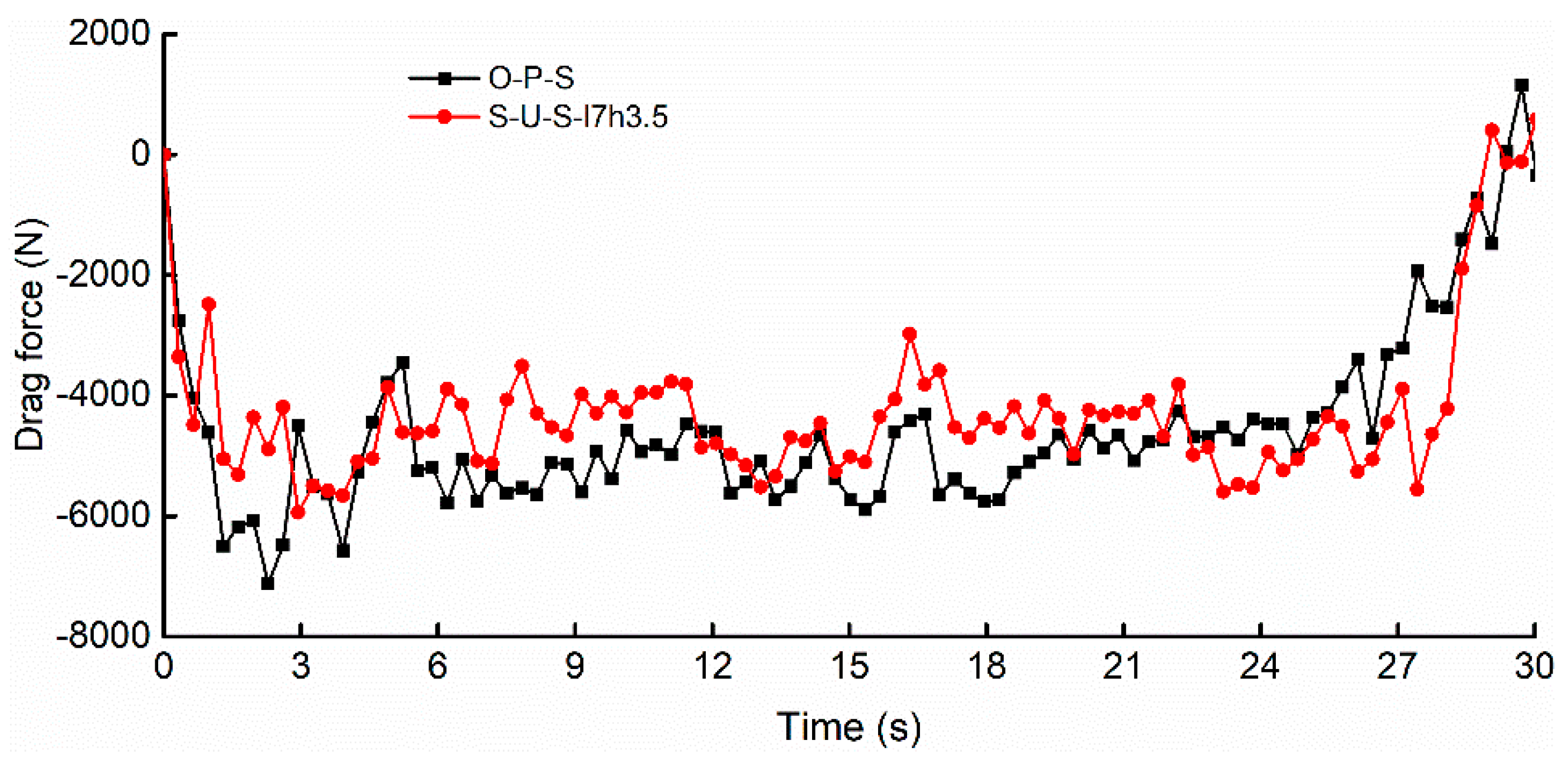
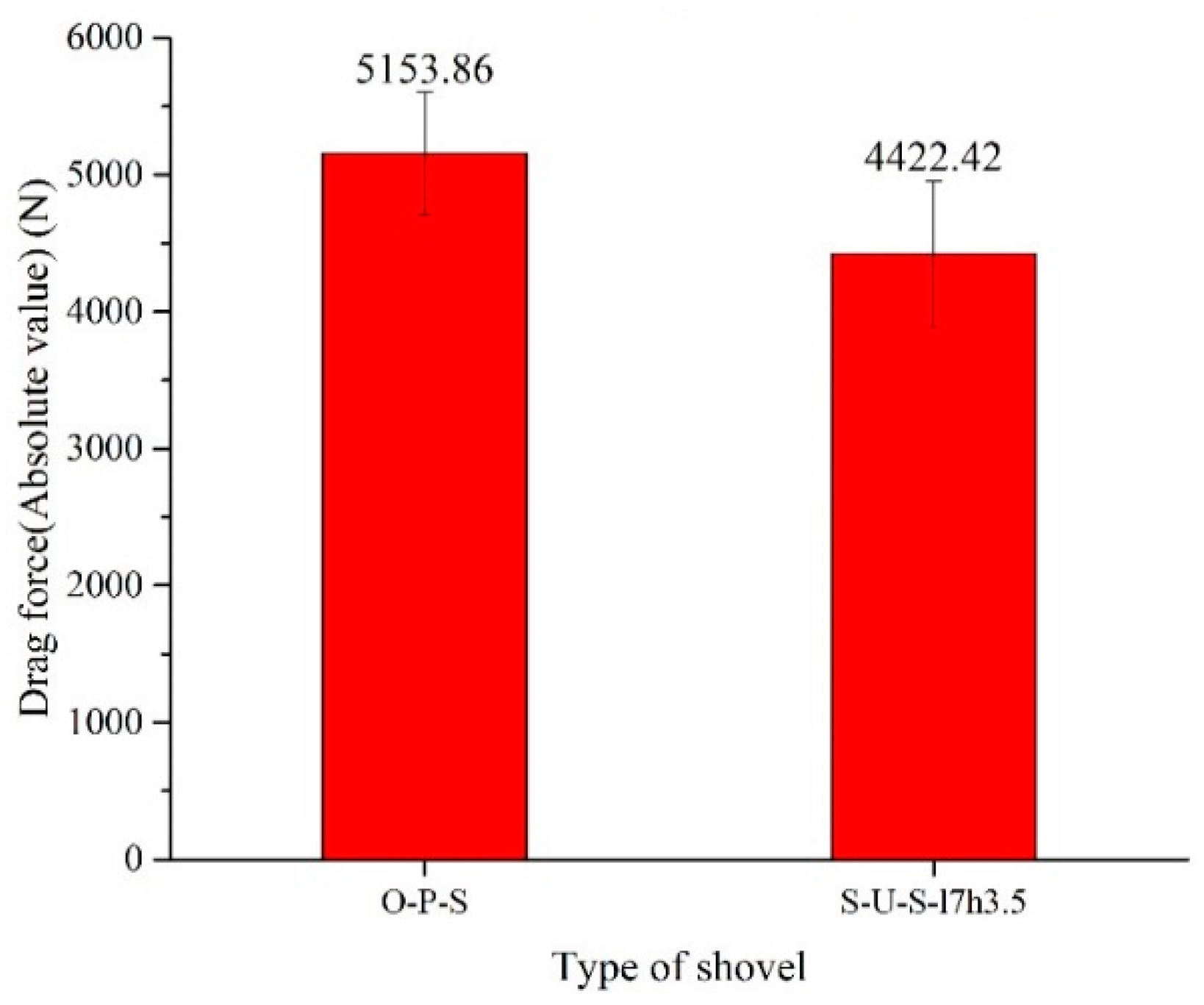
To reduce the test error, the testing requirements for the conditions of the field ridge were as follows: the soil compactness measurements of the two ridges were similar and so were the soil moisture contents; the ridge shapes of the two ridges were similar to each other. The length of each ridge in the field was approximately 70.00 m. One ridge was the test site of the O-P-S and the other ridge was the test site of the S-U-S-
l7
h3.5. The soil compaction was measured by using a handheld soil compactness meter (Field Scout SC-900, Spectrum Technologies, Aurora, Illinois, USA), and the soil moisture content was measured with a handheld soil moisture meter (Field Scout TDR-300, Spectrum Technologies, Aurora, Illinois, USA). The field performance test parameters are listed in
Table 4. The test system for the field performance test is shown in
Figure 10.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}