
A Comparative Performance Evaluation of Routing Protocols for Flying Ad-Hoc Networks in Real Conditions

 ,
, 

Abstract
:1. Introduction
2. State of the Art
2.1. Real Experimental Studies
2.2. Routing Protocols
2.2.1. Topology-Based Routing Protocols
Static Routing Protocols
Proactive Routing Protocols
Reactive Routing Protocols
Hybrid Routing Protocols
2.2.2. Position-Based Routing Protocols
Reactive-Based Routing Protocols
Greedy-Based Routing Protocols
Heterogeneous Routing Protocols
2.2.3. Clustering/Hierarchical Routing Protocols
2.2.4. Swarm-Based Routing Protocols
2.2.5. Delay-Tolerant Network (DTN) Routing Protocols
3. Materials, Methods, and Scenario
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AeroRP | Aeronautical Routing Protocol. |
| AODV | Ad Hoc On-Demand Distance Vector. |
| AODVSEC | AODV Security. |
| APAR | Ant Colony Optimization-Based Polymorphism Aware Routing Algorithm. |
| ARPAM | Ad Hoc Routing Protocol for Aeronautical Mobile Ad Hoc Networks. |
| BATMAN | Better Approach to Mobile Ad Hoc Network. |
| BATMAN-ADV | BATMAN-Advanced. |
| CAUN | Clustering Algorithm of UAV Networking. |
| CBLADSR | Cluster-Based Location-Aided DSR. |
| CE-OLSR | Cartography-Enhanced OLSR. |
| COLSR | Contention-Based OLSR. |
| CRUV | Connectivity-Based Traffic-Density Aware Routing Using UAVs for VANETs. |
| DCR | Data-Centric Routing. |
| DOLSR | Directional OLSR. |
| DSDV | Destination-Sequenced Distance Vector. |
| DSR | Dynamic Source Routing. |
| DTM | Disruption-Tolerant Mechanism. |
| DTN | Delay-Tolerant Network. |
| FANET | Flying Ad Hoc Network. |
| FSR | Fisheye-State Routing. |
| GCS-R | Ground Control System-Routing |
| GDSTR-3D | Greedy Distributed Spanning Tree Routing 3D. |
| GGF | Greedy Geographic Forwarding. |
| GHG | Greedy-Hull-Greedy. |
| GLSR | Geographic Load-Share Routing. |
| GPMOR | Geographic Position Mobility-Oriented Routing. |
| GPSR | Geographic Greedy Perimeter Stateless Routing. |
| GRAA | Geographic Routing Protocol for Aircraft Ad Hoc Network. |
| GRG | Greedy-Random-Greedy. |
| HRP | Hybrid-Routing Protocol. |
| HWMP | Hybrid Wireless Mesh Protocol. |
| LANMAR | Landmark-Routing Protocol. |
| LAROD | Location-Aware Routing for Opportunistic Delay Tolerant. |
| LCAD | Load Carry and Deliver Routing. |
| MANET | Mobile Ad Hoc Network. |
| MAODV | Multicast AODV. |
| MLHR | Multi-Level Hierarchical Routing. |
| ML-OLSR | Mobility and Load-Aware OLSR. |
| MMT | Multi-Meshed Tree Protocol. |
| M-OLSR | Modified-OLSR. |
| MPCA | Mobility Prediction Clustering Algorithm. |
| MPGR | Mobility Prediction-Based Geographic Routing. |
| MUDOR | Multipath Doppler Routing. |
| OLSR | Optimized Link-State Routing. |
| PASER | Position-Aware Secure and Efficient Routing Approach. |
| P-OLSR | Predictive-OLSR. |
| RGR | Reactive-Greedy-Reactive. |
| RTORA | Rapid-Reestablish TORA. |
| SHARP | Sharp Hybrid Adaptive Routing Protocol. |
| SUAP | Secure UAV Ad Hoc Routing Protocol. |
| TBRPF | Topology Broadcast Based on Reverse-Path Forwarding. |
| TORA | Temporarily Ordered Routing Algorithm. |
| TS-AODV | Time-Slotted AODV. |
| UAV | Unmanned Aerial Vehicle. |
| USMP | UAV Search Mission Protocol. |
| UVAR | UAV-Assisted VANET Routing Protocol. |
| VANET | Vehicular Ad Hoc Network. |
| XLinGo | Cross-Layer Link Quality and Geographical-Aware Beaconless. |
| ZRP | Zone-Routing Protocol. |
References
- Guillen-Perez, A.; Cano, M.-D. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Tareque, H.; Hossain, S. Routing in Flying Ad Hoc Networks: Survey, Constraints, and Future Challenge Perspectives. IEEE Access 2019, 7, 81057–81105. [Google Scholar] [CrossRef]
- Rosati, S.; Kruzelecki, K.; Heitz, G.; Floreano, D.; Rimoldi, B. Dynamic Routing for Flying Ad Hoc Networks. IEEE Trans. Veh. Technol. 2016, 65, 1690–1700. [Google Scholar] [CrossRef] [Green Version]
- Rosati, S.; Kruzelecki, K.; Traynard, L.; Rimoldi, B. Speed-aware routing for UAV ad-hoc networks. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1367–1373. [Google Scholar]
- Guillen-Perez, A.; Sanchez-Iborra, R.; Cano, M.-D.; Sanchez-Aarnoutse, J.C.; Garcia-Haro, J. WiFi networks on drones. In Proceedings of the 2016 ITU Kaleidoscope: ICTs for a Sustainable World (ITU WT), Bangkok, Thailand, 14–16 November 2016; pp. 1–8. [Google Scholar]
- Lee, J.; Kim, K.; Yoo, S.; Chung, A.Y.; Lee, J.Y.; Park, S.J.; Kim, H. Constructing a reliable and fast recoverable network for drones. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar]
- Kaysina, I.A.; Vasiliev, D.S.; Abilov, A.; Meitis, D.S.; Kaysin, A.E. Performance evaluation testbed for emerging relaying and coding algorithms in Flying Ad Hoc Networks. In Proceedings of the 2018 Moscow Workshop on Electronic and Networking Technologies (MWENT), Moscow, Russia, 14–16 March 2018. [Google Scholar]
- Maxa, J.-A.; Ben Mahmoud, M.S.; Larrieu, N. Joint Model-Driven design and real experiment-based validation for a secure UAV Ad hoc Network routing protocol. In Proceedings of the 2016 Integrated Communications Navigation and Surveillance (ICNS), Herndon, VA, USA, 19–21 April 2016; pp. 1–16. [Google Scholar]
- Maxa, J.A.; Mahmoud, M.S.B.; Larrieu, N. Survey on UAANET routing protocols and network security challenges. Ad-Hoc Sens. Wirel. Netw. 2017, 37, 231–320. [Google Scholar]
- Cheng, C.-M.; Hsiao, P.-H.; Kung, H.T.; Vlah, D. Maximizing throughput of UAV-relaying networks with the load-carry-and-deliver paradigm. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 4417–4424. [Google Scholar] [CrossRef] [Green Version]
- Sahingoz, O.K. Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Ko, J.; Mahajan, A.; Sengupta, R. A network-centric UAV organization for search and pursuit operations. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 9–16 March 2002; Volume 6, pp. 2697–2713. [Google Scholar]
- Kolios, P.; Friderikos, V.; Papadaki, K. Store carry and forward relay aided cellular networks. In Proceedings of the Seventh International Workshop on Vehicular Ad Hoc Networks, VANET 2010, Chicago, IL, USA, 24 September 2010; pp. 71–72. [Google Scholar]
- Abolhasan, M.; Wysocki, T.; Dutkiewicz, E. A review of routing protocols for mobile ad hoc networks. Ad Hoc Netw. 2004, 2, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Jacquet, P.; Muhlethaler, P.; Clausen, T.; Laouiti, A.; Qayyum, A.; Viennot, L. Optimized link state routing protocol for ad hoc networks. In Proceedings of the IEEE International Multi Topic Conference, IEEE INMIC 2001, Technology for the 21st Century, Lahore, Pakistan, 30–30 December 2001; pp. 62–68. [Google Scholar]
- Perkins, C.E.; Bhagwat, P. Highly dynamic Destination-Sequenced Distance-Vector routing (DSDV) for mobile computers. ACM SIGCOMM Comput. Commun. Rev. 1994, 24, 234–244. [Google Scholar] [CrossRef]
- Johnson, D.L.; Ntlatlapa, N.; Aichele, C. Simple pragmatic approach to mesh routing using BATMAN. In Proceedings of the 2nd IFIP International Symposium on Wireless Communications and Information Technology in Developing Countries, CSIR, Pretoria, South Africa, 6–7 October 2008; pp. 10–20. [Google Scholar]
- Alshbatat, A.I.; Dong, L. Cross layer design for mobile Ad-Hoc Unmanned Aerial Vehicle communication networks. In Proceedings of the 2010 International Conference on Networking, Sensing and Control (ICNSC), Chicago, IL, USA, 10–12 April 2010; pp. 331–336. [Google Scholar] [CrossRef] [Green Version]
- Singh, K.; Verma, A.K. Experimental analysis of AODV, DSDV and OLSR routing protocol for flying adhoc networks (FANETs). In Proceedings of the 2015 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 5–7 March 2015; pp. 1–4. [Google Scholar]
- Yadav, M.; Gupta, S.K.; Saket, R.K. Multi-hop wireless ad-hoc network routing protocols- a comparative study of DSDV, TORA, DSR and AODV. In Proceedings of the 2015 International Conference on Electrical, Electronics, Signals, Communication and Optimization (EESCO), Visakhapatnam, India, 24–25 January 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Broch, J.; Maltz, D.A.; Johnson, D.B.; Hu, Y.-C.; Jetcheva, J. A performance comparison of multi-hop wireless ad hoc network routing protocols. In Proceedings of the Fourth Annual ACM/IEEE International Conference on Mobile Computing and Networking (MobiCom’98), Dallas, TX, USA, 25–30 October 1998; pp. 85–97. [Google Scholar]
- Pojda, J.; Wolff, A.; Sbeiti, M.; Wietfeld, C. Performance analysis of mesh routing protocols for UAV swarming applications. In Proceedings of the 2011 8th International Symposium on Wireless Communication Systems, Aachen, Germany, 6–9 November 2011; pp. 317–321. [Google Scholar]
- Sanchez-Iborra, R.; Cano, M.-D.; Garcia-Haro, J. Performance Evaluation of BATMAN Routing Protocol for VoIP Services: A QoE Perspective. IEEE Trans. Wirel. Commun. 2014, 13, 4947–4958. [Google Scholar] [CrossRef]
- Zheng, Y.; Jiang, Y.; Dong, L.; Wang, Y.; Li, Z.; Zhang, H. A mobility and load aware OLSR routing protocol for UAV mobile ad-hoc networks. In Proceedings of the 2014 International Conference on Information and Communications Technologies (ICT 2014), Nanjing, China, 15–17 May 2014; pp. 1–7. [Google Scholar]
- Li, Y.; Luo, X. Cross layer optimization for cooperative mobile ad-hoc UAV network. Int. J. Digit. Content Technol. Appl. 2012, 6, 367–375. [Google Scholar]
- Paul, A.B.; Nandi, S. Modified Optimized Link State Routing (M-OLSR) for Wireless Mesh Networks. In Proceedings of the 2008 International Conference on Information Technology, Bhubaneswar, India, 17–20 December 2008; pp. 147–152. [Google Scholar]
- Belhassen, M.; Belghith, A.; Abid, M.A. Performance evaluation of a cartography enhanced OLSR for mobile multi-hop ad hoc networks. In Proceedings of the 2011 Wireless Advanced, London, UK, 20–22 June 2011; pp. 149–155. [Google Scholar] [CrossRef]
- Bellur, B.; Ogier, R.G.; Templin, F.L. Topology broadcast based on reverse-path forwarding routing protocol (tbrpf). In ETF Internet Draft; RFC: Fremont, CA, USA, 2003. [Google Scholar]
- Pei, G.; Gerla, M.; Chen, T.-W. Fisheye state routing: A routing scheme for ad hoc wireless networks. In Proceedings of the 2000 IEEE International Conference on Communications, ICC 2000, Global Convergence through Communications, Conference Record, New Orleans, LA, USA, 18–22 June 2000; pp. 70–74. [Google Scholar] [CrossRef]
- Chroboczek, J. The Babel Routing Protocol. 2011. Available online: https://www.hjp.at/(en)/doc/rfc/rfc6126.html (accessed on 11 May 2021).
- Johnson, D.B.; Maltz, D.A. Dynamic source routing in ad hoc wireless networks. In Mobile Computing; Springer: Boston, MA, USA, 2007; pp. 153–181. [Google Scholar]
- Perkins, C.E.; Royer, E.M. Ad-hoc on-demand distance vector routing. In Proceedings of the 2nd IEEE Workshop on Mobile Computing Systems and Applications (WMCSA 1999), New Orleans, LA, USA, 25–26 February 1999; pp. 90–100. [Google Scholar]
- Forsmann, J.H.; Hiromoto, R.E.; Svoboda, J. A time-slotted on-demand routing protocol for mobile ad hoc unmanned vehicle systems. In Proceedings of the SPIE 6561, Unmanned Systems Technology IX, Orlando, FL, USA, 2 May 2007; Volume 6561, p. 65611P. [Google Scholar] [CrossRef] [Green Version]
- Royer, E. Multicast ad hoc on-demand distance vector (MAODV) routing. In IETF Internet Draft; RFC: Fremont, CA, USA, 2000. [Google Scholar]
- Aggarwal, A. AODVSEC: A Novel Approach to Secure Ad Hoc On-Demand Distance Vector (AODV) Routing Protocol from Insider Attacks in MANETs. Int. J. Comput. Netw. Commun. 2012, 4, 191–210. [Google Scholar] [CrossRef]
- Haas, P.; Pearlman, Z.J.; Samar, M.R. The Zone Routing Protocol (ZRP) for Ad Hoc Networks. In IETF Draft; RFC: Fremont, CA, USA, 2002; p. 11. [Google Scholar]
- Park, V.; Corson, S. Temporally-Ordered Routing Algorithm (TORA) Version 1 Functional Specification. In IETF MANET Work. Gr. INTERNET-DRAFT; RFC: Fremont, CA, USA, 2002; pp. 1–23. [Google Scholar]
- Zhai, Z.; Du, J.; Ren, Y. The Application and Improvement of Temporally Ordered Routing Algorithm in Swarm Network with Unmanned Aerial Vehicle Nodes. In Proceedings of the ICWMC 2013: The Ninth International Conference on Wireless and Mobile Communications, Nice, France, 21–26 July 2013; pp. 7–12. [Google Scholar]
- Wei, Y.; Blake, M.B.; Madey, G.R. An Operation-Time Simulation Framework for UAV Swarm Configuration and Mission Planning. Procedia Comput. Sci. 2013, 18, 1949–1958. [Google Scholar] [CrossRef] [Green Version]
- Ramasubramanian, V.; Haas, Z.J.; Sirer, E.G. SHARP: A Hybrid Adaptive Routing Protocol for Mobile Ad Hoc Networks. In Proceedings of the 4th ACM International Symposium Mobile ad hoc Network Computer—MobiHoc ’03, Annapolis, MD, USA, 1–3 June 2013; p. 303. [Google Scholar]
- Pei, G.; Gerla, M.; Hong, X.; Chiang, C.-C. A wireless hierarchical routing protocol with group mobility. In Proceedings of the 1999 IEEE Wireless Communications and Networking Conference (Cat. No.99TH8466), New Orleans, LA, USA, 21–24 September 1999; Volume 3, pp. 1538–1542. [Google Scholar] [CrossRef]
- Shirani, R. Reactive-Greedy-Reactive in Unmanned Aeronautical Ad-Hoc Networks: A Combinational Routing Mechanism. Master’s Thesis, Carleton University, Ottawa, ON, Canada, August 2011. [Google Scholar]
- Shirani, R.; St-Hilaire, M.; Kunz, T.; Zhou, Y.; Li, J.; Lamont, L. The Performance of Greedy Geographic Forwarding in Unmanned Aeronautical Ad-Hoc Networks. In Proceedings of the 2011 Ninth Annual Communication Networks and Services Research Conference, Ottawa, ON, Canada, 2–5 May 2011; pp. 161–166. [Google Scholar]
- Iordanakis, M.; Yannis, D.; Karras, K.; Bogdos, G.; Dilintas, G.; Amirfeiz, M.; Colangelo, G.; Baiotti, S. Ad-hoc routing protocol for aeronautical mobile ad-hoc networks. In Proceedings of the Fifth International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Achaia, Greece, 19–21 July 2006; pp. 1–5. [Google Scholar]
- Ni, M.; Zhong, Z.; Wu, H.; Zhao, D. A New Stable Clustering Scheme for Highly Mobile Ad Hoc Networks. In Proceedings of the 2010 IEEE Wireless Communication and Networking Conference, Sydney, NSW, Australia, 18–21 April 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Dora, D.P.; Kumar, S.; Kaiwartya, O. Efficient dynamic caching for geocast routing in VANETs. In Proceedings of the 2015 2nd International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 19–20 February 2015; pp. 979–983. [Google Scholar]
- Lin, L.; Sun, Q.; Li, J.; Yang, F. A novel geographic position mobility oriented routing strategy for UAVs. J. Comput. Inf. Syst. 2012, 8, 709–716. [Google Scholar]
- Lin, L.; Sun, Q.; Wang, S.; Yang, F. A geographic mobility prediction routing protocol for Ad Hoc UAV Network. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1597–1602. [Google Scholar] [CrossRef]
- Medina, D.; Hoffmann, F.; Rossetto, F.; Rokitansky, C.-H. A Geographic Routing Strategy for North Atlantic In-Flight Internet Access Via Airborne Mesh Networking. IEEE/ACM Trans. Netw. 2011, 20, 1231–1244. [Google Scholar] [CrossRef] [Green Version]
- Lidowski, R.L.; Mullins, B.E.; Baldwin, R.O. A novel communications protocol using geographic routing for swarming UAVs performing a Search Mission. In Proceedings of the 2009 IEEE International Conference on Pervasive Computing and Communications, Galveston, TX, USA, 9–13 March 2009; pp. 1–7. [Google Scholar]
- Liu, C.; Wu, J. Efficient Geometric Routing in Three Dimensional Ad Hoc Networks. In Proceedings of the IEEE INFOCOM 2009—The 28th Conference on Computer Communications, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 2751–2755. [Google Scholar]
- Flury, R.; Wattenhofer, R. Randomized 3D geographic routing. In Proceedings of the IEEE INFOCOM 2008—The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 1508–1516. [Google Scholar]
- Zhou, J.; Chen, Y.; Leong, B.; Sundaramoorthy, P.S. Practical 3D geographic routing for wireless sensor networks. In Proceedings of the 8th ACM Conference on Web Science, Zurich, Switzerland, 3–5 November 2010; pp. 337–350. [Google Scholar]
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. CRUV: Connectivity-based traffic density aware routing using UAVs for VANets. In Proceedings of the 2015 International Conference on Connected Vehicles and Expo (ICCVE), Shenzhen, China, 19–23 October 2015; pp. 68–73. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. UVAR: An intersection UAV-assisted VANET routing protocol. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Sbeiti, M.; Goddemeier, N.; Behnke, D.; Wietfeld, C. PASER: Secure and Efficient Routing Approach for Airborne Mesh Networks. IEEE Trans. Wirel. Commun. 2016, 15, 1950–1964. [Google Scholar] [CrossRef]
- Rosário, D.; Zhao, Z.; Braun, T.; Cerqueira, E.; Santos, A.; Alyafawi, I. Opportunistic routing for multi-flow video dissemination over Flying Ad-Hoc Networks. In Proceedings of the IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks 2014, Sydney, NSW, Australia, 19 June 2014; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Zhang, J.; Zhang, T. The clustering algorithm of UAV Networking in Near-space. In Proceedings of the 2008 8th International Symposium on Antennas, Propagation and EM Theory, Kunming, China, 2–5 November 2008; pp. 1550–1553. [Google Scholar]
- Zang, C.; Zang, S. Mobility prediction clustering algorithm for UAV networking. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1158–1161. [Google Scholar] [CrossRef]
- Pei, G.; Gerla, M.; Hong, X. LANMAR: Landmark routing for large scale wireless Ad Hoc Networks with group mobility. In Proceedings of the 2000 First Annual Workshop on Mobile and Ad Hoc Networking and Computing, MobiHOC (Cat. No.00EX444), Boston, MA, USA, 11 August 2000; pp. 11–18. [Google Scholar]
- Martin, N.; Al-Mousa, Y.; Shenoy, N. An Integrated Routing and Medium Access Control Framework for Surveillance Networks of Mobile Devices. Comput. Vis. 2011, 6522, 315–327. [Google Scholar] [CrossRef]
- Shi, N.; Luo, X. A Novel Cluster-Based Location-Aided Routing Protocol for UAV Fleet Networks. Int. J. Digit. Content Technol. Appl. 2012, 6, 376–383. [Google Scholar] [CrossRef] [Green Version]
- Fu, B.; Dasilva, L.A. A mesh in the sky: A routing protocols for airbone networks. In Proceedings of the MILCOM 2007—IEEE Military Communications Conference, Orlando, FL, USA, 29–31 October 2007; pp. 1–7. [Google Scholar]
- Leonov, A.V. Application of bee colony algorithm for FANET routing. In Proceedings of the 2016 17th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices (EDM), Erlagol, Russia, 30 June–4 July 2016; pp. 124–132. [Google Scholar] [CrossRef]
- Leonov, A.V. Modeling of bio-inspired algorithms AntHocNet and BeeAdHoc for Flying Ad Hoc Networks (FANETs). In Proceedings of the 2016 13th International Scientific-Technical Conference on Actual Problems of Electronics Instrument Engineering (APEIE), Novosibirsk, Russia, 3–6 October 2016; Volume 2, pp. 90–99. [Google Scholar] [CrossRef]
- Yu, Y.; Ru, L.; Chi, W.; Liu, Y.; Yu, Q.; Fang, K. Ant colony optimization based polymorphism-aware routing algorithm for ad hoc UAV network. Multimedia Tools Appl. 2016, 75, 14451–14476. [Google Scholar] [CrossRef]
- Kuiper, E.; Nadjm-Tehrani, S. Geographical Routing with Location Service in Intermittently Connected MANETs. IEEE Trans. Veh. Technol. 2010, 60, 592–604. [Google Scholar] [CrossRef]
- Jabbar, A.; Sterbenz, J.P.G. AeroRP: A Geolocation Assisted Aeronautical Routing Protocol for Highly Dynamic Telemetry Environments. In Proceedings of the International Telemetering Conference, Las Vegas, NV, USA, 26–29 October 2009; pp. 1–10. [Google Scholar]
- Hyeon, S.; Kim, K.-I. A new geographic routing protocol for aircraft ad hoc networks. In Proceedings of the 29th Digital Avionics Systems Conference, Salt Lake City, UT, USA, 3–7 October 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Whitbeck, J.; Conan, V. HYMAD: Hybrid DTN-MANET routing for dense and highly dynamic wireless networks. Comput. Commun. 2010, 33, 1483–1492. [Google Scholar] [CrossRef] [Green Version]
- Burgess, J.; Gallagher, B.; Jensen, D.; Levine, B.N. MaxProp: Routing for Vehicle-Based Disruption-Tolerant Networks. In Proceedings of the IEEE INFOCOM 2006, 25th IEEE International Conference on Computer Communications, Barcelona, Spain, 23–29 April 2006; Volume 6, pp. 1–11. [Google Scholar] [CrossRef]
- Spyropoulos, T.; Psounis, K.; Raghavendra, C.S. Spray and wait: An efficient routing scheme for intermittently connected mobile networks. In Proceedings of the ACM SIGCOMM 2005 Work, Delay-Tolerant Networking, WDTN 2005, Philadelphia, PA, USA, 22–26 August 2005; pp. 252–259. [Google Scholar]
- Lindgren, A.; Doria, A.; Schelén, O. Probabilistic routing in intermittently connected networks. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2003, 7, 19–20. [Google Scholar] [CrossRef]
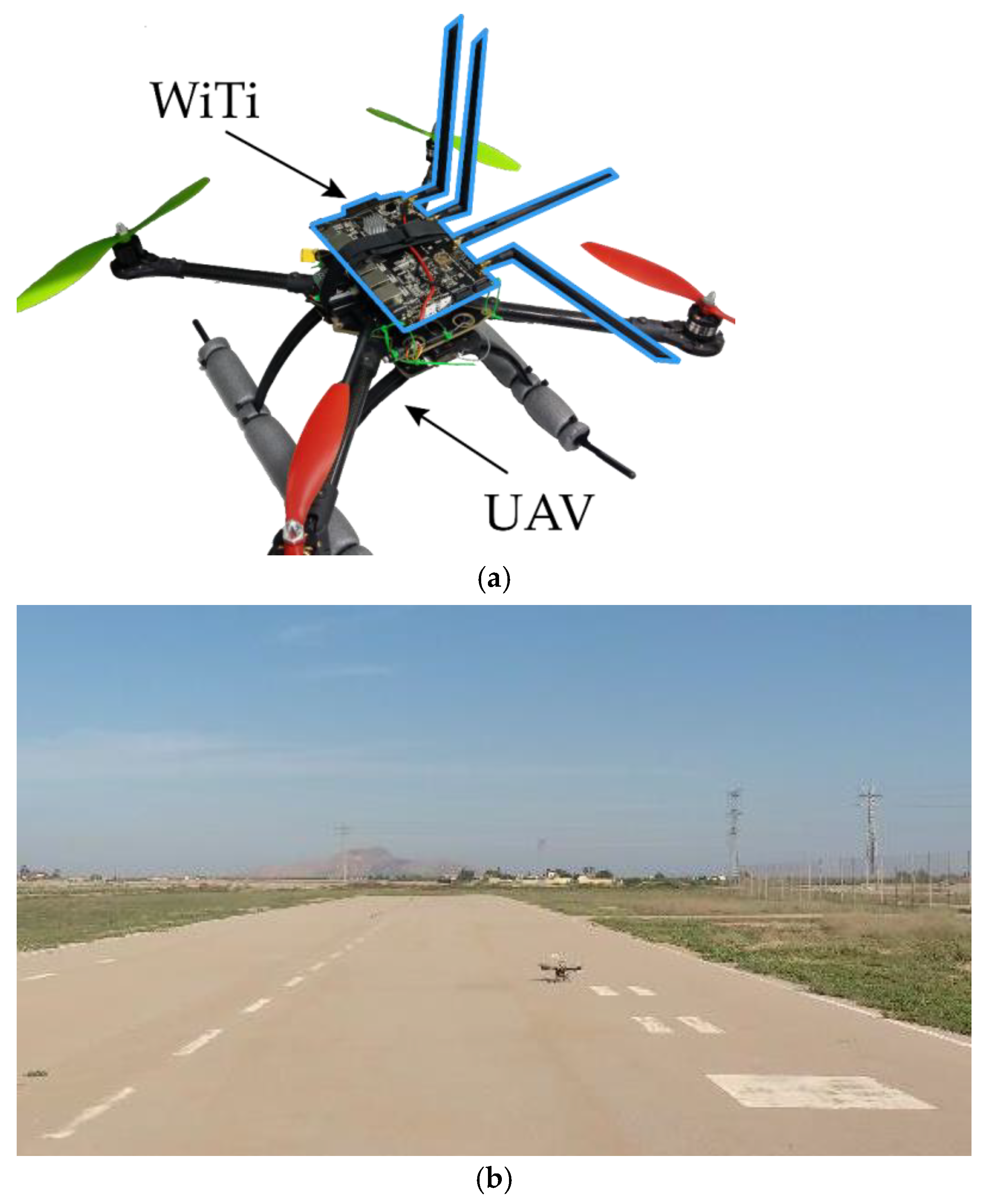
- mqmaker. WiTi Board. Available online: https://goo.gl/bfSvM8 (accessed on 4 December 2017).
- Iperf. Available online: https://iperf.fr/ (accessed on 20 May 2016).
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.-C.; Schneckenburger, N. A Survey of Air-to-Ground Propagation Channel Modeling for Unmanned Aerial Vehicles. IEEE Commun. Surv. Tutor. 2019, 21, 2361–2391. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Routing Protocols | Number of UAVs |
|---|---|---|
| Rosati et al. [4] | OLSR, P-OLSR | 2 |
| Rosati et al. [5] | Babel, OLSR, P-OLSR | 3 |
| Guillen et al. [6] | BATMAN-ADV | 2 |
| Lee et al. [7] | GCS-R, DSDV, OLSR | 6 |
| Kaysina et al. [8] | BATMAN | 1 |
| Maxa et al. [9] | SUAP | 2 |
| Type | Subtype | Routing Algorithm |
|---|---|---|
| Topology-Based | Static | LCAD [11], MLHR [12], DCR [13] |
| Proactive | OLSR [16], DSDV [17], BATMAN [18], BATMAN-ADV [23], DOLSR [19], P-OLSR [5], ML-OLSR [25], COLSR [26], M-OLSR [27], CE-OLSR [28], TBRPF [29], FSR [30], Babel [31] | |
| Reactive | DSR [32], AODV [33], TS-AODV [34], MAODV [35], AODVSEC [36] | |
| Hybrid | ZRP [37], TORA [38], RTORA [39], HWMP [40], SHARP [41], HRP [42] | |
| Position-Based | Reactive-Based | RGR [43], GGF [44], ARPAM [45], MUDOR [46] |
| Greedy-Based | GPMOR [48], MPGR [49], GLSR [50], GPSR [51], GHG [52], GRG [53], GDSTR-3D [54], USMP [51] | |
| Heterogeneous | CRUV [55], UVAR [56], PASER [57], XLinGo [58], SUAP [9] | |
| Clustering/Hierarchical | CAUN [59], MPCA [60], LANMAR [61], MMT [62], CBLADSR [63], DTM [64] | |
| Swarm-Based | BeeAdHoc [65], AntHocNet [66], APAR [67] | |
| Delay-Tolerant Network | LAROD [68], AeroRP [69], GRAA [70], Epidemic [71], Maxprop [72], Spray and Wait [73], Prophet [74] |
| Routing Protocol | Frequency Band | Distance | ||||||
|---|---|---|---|---|---|---|---|---|
| 10 m | 20 m | 30 m | 40 m | 50 m | 60 m | 70 m | ||
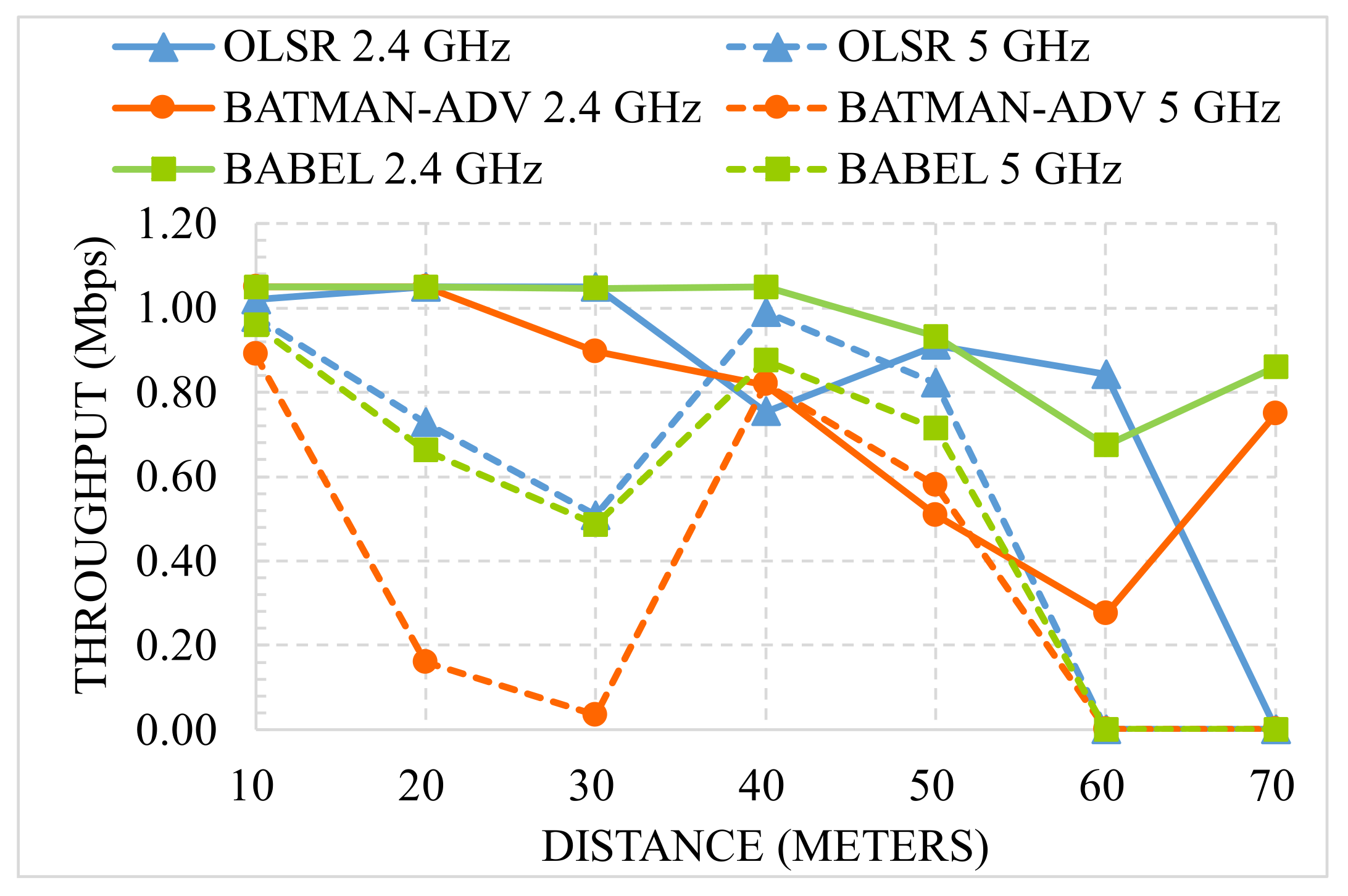
| OLSR | 2.4 GHz | 1.02 | 1.05 | 1.05 | 0.75 | 0.91 | 0.84 | 0.00 |
| 5 GHz | 0.98 | 0.73 | 0.51 | 0.99 | 0.82 | 0.00 | 0.00 | |
| BATMAN-ADV | 2.4 GHz | 1.05 | 1.05 | 0.90 | 0.82 | 0.51 | 0.27 | 0.75 |
| 5 GHz | 0.89 | 0.16 | 0.03 | 0.82 | 0.58 | 0.00 | 0.00 | |
| Babel | 2.4 GHz | 1.05 | 1.05 | 1.05 | 1.05 | 0.93 | 0.67 | 0.86 |
| 5 GHz | 0.96 | 0.66 | 0.49 | 0.88 | 0.71 | 0.00 | 0.00 | |
| Routing Protocol | Frequency Band | Distance | ||||||
|---|---|---|---|---|---|---|---|---|
| 10 m | 20 m | 30 m | 40 m | 50 m | 60 m | 70 m | ||
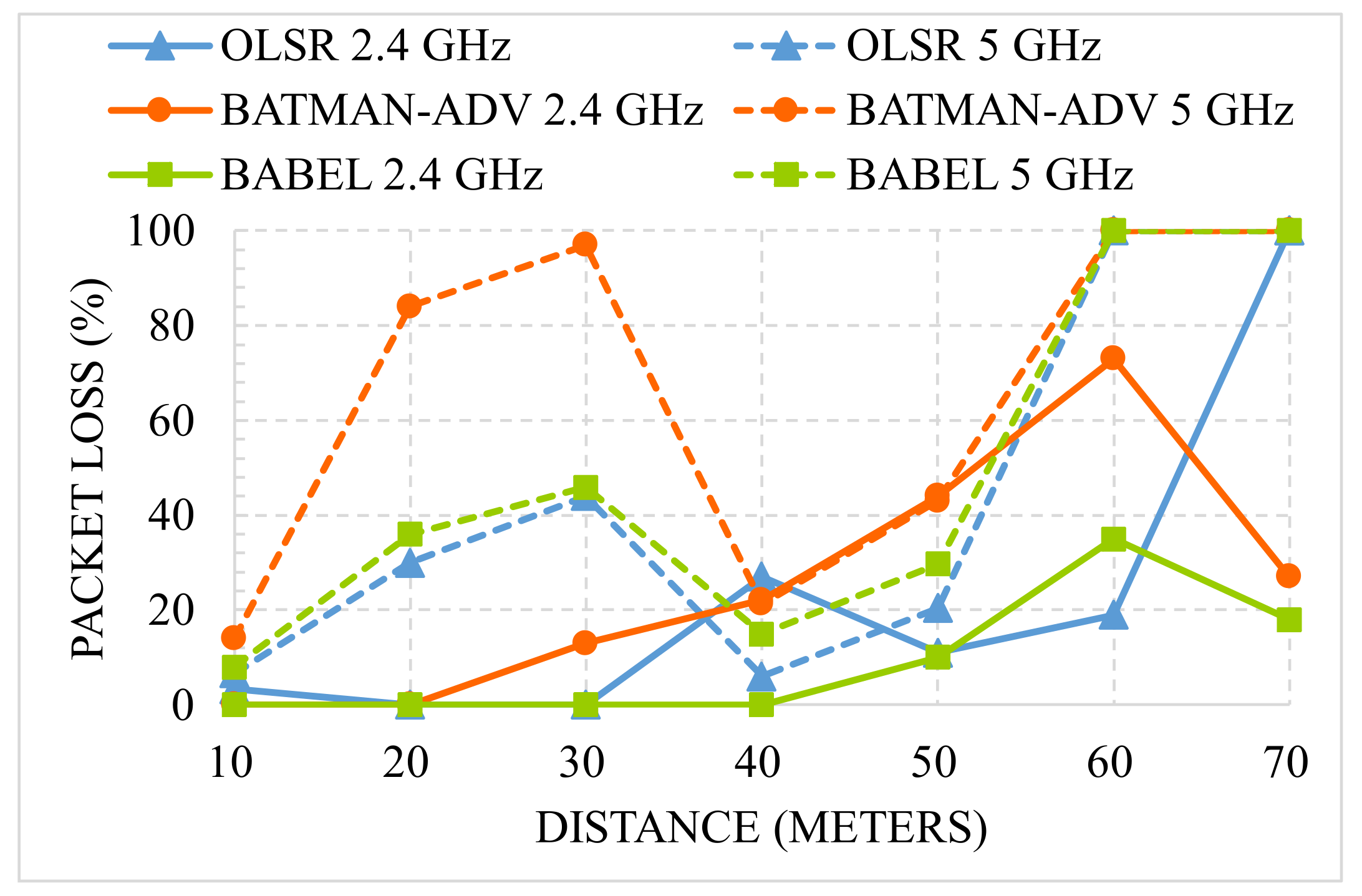
| OLSR | 2.4 GHz | 3.3% | 0% | 0% | 27% | 11% | 19% | 100% |
| 5 GHz | 6.6% | 30% | 44% | 6% | 20.4% | 100% | 100% | |
| BATMAN-ADV | 2.4 GHz | 0% | 0% | 13% | 22.1% | 44% | 73% | 27% |
| 5 GHz | 14% | 84% | 97% | 21.3% | 43% | 100% | 100% | |
| Babel | 2.4 GHz | 0% | 0% | 0% | 0% | 10% | 35% | 18% |
| 5 GHz | 8% | 36% | 45.9% | 15% | 29.7% | 100% | 100% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guillen-Perez, A.; Montoya, A.-M.; Sanchez-Aarnoutse, J.-C.; Cano, M.-D. A Comparative Performance Evaluation of Routing Protocols for Flying Ad-Hoc Networks in Real Conditions. Appl. Sci. 2021, 11, 4363. https://0-doi-org.brum.beds.ac.uk/10.3390/app11104363
Guillen-Perez A, Montoya A-M, Sanchez-Aarnoutse J-C, Cano M-D. A Comparative Performance Evaluation of Routing Protocols for Flying Ad-Hoc Networks in Real Conditions. Applied Sciences. 2021; 11(10):4363. https://0-doi-org.brum.beds.ac.uk/10.3390/app11104363
Chicago/Turabian StyleGuillen-Perez, Antonio, Ana-Maria Montoya, Juan-Carlos Sanchez-Aarnoutse, and Maria-Dolores Cano. 2021. "A Comparative Performance Evaluation of Routing Protocols for Flying Ad-Hoc Networks in Real Conditions" Applied Sciences 11, no. 10: 4363. https://0-doi-org.brum.beds.ac.uk/10.3390/app11104363