
A Low Energy IoT Application Using Beacon for Indoor Localization
by
 , , , and
, , , and
Francesco Pascale
1,* ,
,
Ennio Andrea Adinolfi
2,
Massimiliano Avagliano
3,
Venanzio Giannella
2 and
Andres Salas
4 1
Department of Energy, Polytechnic of Milan, 20156 Milan, Italy
2
Department of Industrial Engineering, University of Salerno, 84084 Fisciano, Italy
3
Department of Electrical Engineering and Information Technologies, University of Naples “Federico II”, 80126 Naples, Italy
4
Department of Electrical Engineering, Universidad Técnica de Manabí, Portoviejo 130105, Ecuador
*
Author to whom correspondence should be addressed.
Appl. Sci. 2021, 11(11), 4902; https://0-doi-org.brum.beds.ac.uk/10.3390/app11114902
Submission received: 27 April 2021
/
Revised: 20 May 2021
/
Accepted: 25 May 2021
/
Published: 26 May 2021
Abstract
:In recent years, a great number of applications in Internet of Things (IoT) have been developed. In this context, many methodologies and technologies are used for several frameworks, including indoor localization. In this field, as highlighted in recent years, one of the most important aims of modern indoor applications in IoT is to identify how to manage and correctly convey people flow. This study aims to investigate the most common methods, technologies and applications for indoor localization in IoT and analyze the major systems currently in use and the application of these solutions to actual conditions. Following this, we propose an innovative method to detect people flow in indoor location. Based on Bluetooth low energy (BLE) technology, in this paper we analyze the possibility to use our system for many kinds of applications. The first experimental results show good performance of our system.
1. Introduction
With the development of the Internet of Things, there has been an exponential evolution in the use and implementation of many smart devices. Examples of this are the countless smartphones, tablets, smartwatches, etc., present today [1]. It is estimated, in fact, that by 2025, the number of devices connected to the internet will be about 50 billion—a significant rule that pushes multinationals to focus on and invest in all those technologies that make the Internet of Things project increasingly at the center of the world [2,3]. Thanks to the use of these smart devices, it is easier to enter the world of the internet and all those resources that the web offers. At the base of this development is the progress of technology that responds to these changes to allow interaction in a simple and direct way, not only with all devices, but also with the needs of the smartphones market, hence, the birth of so-called nearables,—small devices equipped with sensors that activate in proximity to other devices (hence the term nearable) by sending and/or receiving information via wireless connections, such as Wi-Fi and Bluetooth [4,5]. Another important point of view highlighted during the last years is tracking people flow in indoor locations, such as, for example, museums, sports halls, theaters, etc. Our research aims to investigate what the major methods, technologies and applications for indoor localization are, starting from “modern” devices, such as smartphones and wearable objects and their possible uses. Generally, when we talk about wearable objects, we refer to “miniaturized devices that can be worn under, over or inside the same clothes we wear, and sometimes function as real extensions of the mind and body of the wearer” [6]. Wireless communication refers to the transfer of any type of information between two or more points that are not physically connected to each other. The developments in the field of communication and the advent of the Internet of Things have led to a wide range of different services in order to improve the quality of service (QoS) provided to the user [7,8]. Among these, services based on internal location are of interest. Although the GPS—acronym for Global Position System—is a fairly accurate positioning system for the estimation of position, in an indoor environment it is unusable, due to the scarce or even non-existent presence of a satellite signal [9,10].
To solve the problem of indoor localization, techniques have been adopted that mainly concern the IEEE 802.11 standard and, in particular, the b and g releases (commercially known as Wi-Fi). Indoor localization, compared to the outdoor one, is much more challenging due to the presence of a wide range of obstacles that affect the result of the localization [11]. In order to design a functioning indoor localization system, it is necessary to take advantage of everything that is currently present in the state of the art.
Localization in an indoor environment turns out to be an essential and important research problem of the Internet of Things. Since smart objects can be identified and equipped with wireless communication capabilities, it is possible to locate them in a certain environment [12]. Location-based IoT applications are exploited to monitor objects and people for resource management, for agriculture, and for health care. Unlike what happens with an outdoor positioning system, where the LTE network is used in addition to GPS for a more precise location, for an indoor location system, it is necessary to develop a hardware–software set that can simulate the GPS function within a delimited and closed space.
The idea behind this localization system is to exploit “smart” objects, deriving precisely from the IoT, in order to define an infrastructure system capable of reading and returning the required result. For this purpose, the IoT uses some detection devices, such as sensors, RFID tags and Bluetooth devices. The wireless location systems basically imply the presence of at least three points of reference from which to obtain useful information for the final goal, distributed in fixed positions known a priori, of at least one mobile node. The technologies used in these systems are highly heterogeneous; among the most used are Wi-Fi, ultrasound, radio frequency identification (RFID) and Bluetooth communication [13]. To date, however, there is no dominant technology that can be used in all cases. Each technology that an indoor localization system can use processes, through various techniques, the data received from the sensors in a different way.
However, it is possible to divide and manage a generic localization system essentially through two phases:
- Data collection: In this phase, all useful information is collected from the reference sensors and then processed to provide the data actually requested (the final position);
- Localization: The devices that act as transmitters are affected by the surrounding environment and any obstacles. This phase is used to improve the accuracy of the position estimation, taking into account any systematic errors due to any interference.
The aim of this paper is to provide a system to detect people in an indoor location, using BLE technology. An indoor location system can be defined as a system for identifying the position of objects or people in a delimited and closed space. Subsequently, guidelines are drawn for the approximate calculation of the coordinates of a two-dimensional space of the position of a specific object, or user, in an indoor environment. The various techniques used today are based on such technologies as ultrasound, Bluetooth, Wi-Fi, etc. The techniques that can be used are divided into two distinct types: recognition techniques based on tracing (triangulation, proximity, dead reckoning) [14], and techniques defined as RSS techniques, based on signals wireless. What happens is that often the localization systems, based exclusively on a single technology, suffer from errors due to the limitations of the technology itself, often resulting in lower accuracy or even, at times, an exaggerated increase in costs due to the attempt to correct errors. The current trend is to combine multiple sensing technologies in order to increase accuracy and reduce costs, making the most of the characteristics of each technology.
2. Related Works
Unlike what happens for an outdoor location, an indoor one cannot refer to and rely on a single technology; for this reason, it is much more complex. Indoor localization, therefore, requires both instruments other than satellite ones—that is, it cannot depend on the use of GPS—and knowledge of the nature of the environment in which the localization must be implemented [15]. To compensate for the ineffectiveness of the GPS signal in an indoor environment, localization systems have been designed based both on different sensing technologies, such as defined radio localization—technologies such as Wi-Fi and Bluetooth—and on methods that require a priori knowledge of the structure where the indoor localization system is to be applied (an example is dead reckoning). All these technologies used today for indoor localization differ in terms of accuracy, costs and efforts, although in recent years, there has been a marked improvement in the accuracy–cost ratio.
Radio localization is a method that allows the estimation of the position in real time through the use of radio antennas arranged in fixed and well-defined positions known a priori. A technology that is widely used in indoor environments is Bluetooth: “small Bluetooth antennas are used that allow you to interact with the mobile phones of people who are at distances up to 70 m from the antenna”. Bluetooth technology is widely used in not very large environments, so all signals transmitted by the antennas are received by the device. These particular antennas, which appear to be inexpensive, small and with a long battery life, take advantage of a low-power, wireless connectivity, defined as BLE—Bluetooth low energy [16]. With BLE technology, it is possible to take advantage of Wi-Fi connectivity: the results are good in closed environments and fragmented by walls, such as hospitals or buildings, where the solution is used to track in real time the positioning of assets such as medical equipment or hospital operators. The most used method under WLAN connection to locate the user, who must have a device with Wi-Fi connectivity with them, is to exploit the power of the signals sent to the device by the access points at regular intervals of time.
Another technology that follows Wi-Fi and Bluetooth is that of Ultra WideBand (UWB). This technology represents a method capable of providing, with low energy consumption, a short-range communication but at high speed. Ultra WideBand does nothing but send many short duration pulses so as to be able to filter the signals reflected from the original signal: in other words, the low frequency of UWB pulses allows the signal to pass effectively through obstacles, such as walls and objects. This last statement makes us understand how this technology is widely used to improve the accuracy of the position calculation [17,18].
Another method that can be used is represented by dead reckoning: the positioning is determined starting from a previously known position, using an estimate of speed, direction and time. It is possible to determine these estimates through elementary movements, such as walking or running, using mechanical and electrical sensors: in this way, the values of speed, direction and time are obtained [17,19]. RFID technology, on the other hand, consists of three fundamental elements:
- Tag: A small electronic device consisting of a microchip with simple control logic functions connected to an antenna, both mounted on a substrate, similar to an adhesive label, which supports them. This chip (of a few millimeters) represents the smart part and consists of a non-volatile memory and a unique code, which is transmitted to the reader, which has the task of processing all the data received;
- Reader: A transceiver controlled by a microprocessor, used to receive and acquire the information from the tags;
- Management System: A system that allows, starting from the univocal code, to retrieve all the various information available and to manage them.
When the reader generates an electromagnetic field, the tag, passing through the field itself, transmits its information to the reader. Once the tag has decoded the reader signal as correct, it “responds” to it by reflecting, through its antenna, and modulating the field emitted by the reader [20,21]. The communication between reader and tag are described in specific standards, while the information that the tag transmits to the reader is contained in a certain amount of memory that each tag contains within it. Currently, the standardization process sees organizations such as ISO, ETSI and EPC-global as protagonists. Among the various standards adopted for this RFID technology we find the following [22]:
- ISO/IEC 15961: “RFID for Item Management: Host Interrogator; Tag functional commands and other syntax features”;
- ISO/IEC 15962: “RFID for Item Management: Data Syntax”;
- ISO/IEC 15963: “Unique Identification of RF tag and Registration Authority to manage the uniqueness”.
In the application field, the use of an RFID system is very broad. For example, it is possible to exploit this technology in storage sites for the tracking of goods in transit, for access control through the use of tickets, for identification by season tickets or cards, and even for the location of livestock in the pasture or wild animals. In short, it is a technology that has many applications but which also faces some problems, such as privacy and security, high cost, and possibility of uncertain reading in the case of a large number of articles. The uncertainty in the reading may depend on strong interference due to the presence of both liquid masses, which absorb the signals, and to metal surfaces, which reflect them. Table 1 summarizes the main technologies used for an indoor localization system in relation to accuracy, power consumption and cost.
Some recent works have shown how it is possible to use passive Wi-Fi tag and Wi-Fi fingerprint techniques to obtain an indoor location and other possible ones on UWB [23,24,25]. One of the main problems highlighted in the literature are interference problems. In fact, in order to have a good response, there is a need to have systems that are sufficiently performant or to be in charge of environmental disturbances, such as electromagnetic sources, shielded materials or even cases of low consumption techniques that the same people constitute as problems.
3. Background on Methods and Technologies for Indoor Localization
The study of indoor localization arises from the need to locate certain objects or people in large buildings, offices, museums, hospitals, etc. The term localization system refers to a system capable of calculating and determining the spatial position of a specific object or a specific person. In reality, the position data are not the only parameters that can be obtained: objects can also be monitored through temperature, movement and light sensors.
In addition to locating objects and people in real time, it is therefore possible to do the following:
- Trace the path of objects/people at a certain time;
- Calculate the parking times of an object/person in a certain area;
- Analyze the various interactions between objects and people.
In a localization system, it is possible to distinguish, in the same area, both fixed points, known a priori, and mobile points, identified through relations on the coordinates of the first ones. An indoor localization system has the ultimate purpose of returning, as accurately and quickly as possible, the user’s position with respect to a spatial reference system. Specifically, for indoor environments, the position is determined and represented using the coordinates of a Cartesian system, as we are not interested in determining the position according to the characteristics of the earth.
The other reference system that is adopted, this time for outdoor environments, is the one called “ellipsoidal reference system” since it is more suitable for large and complex geographical locations. Localization techniques are divided into four general methodologies [26,27,28]:
- Angle of Arrival (AOA);
- Time of Arrival (TOA);
- Time Difference of Arrival (TDOA);
- RSSI-based method.
The last methodology was analyzed and addressed during the internship experience: the idea behind this technique is to exploit, as we will see in the next paragraph, the power signal of the devices in order to obtain useful information from translation into distance. In the following paragraphs, however, the other methodologies will also be described and analyzed in order to fully understand both their basic functioning and how localization in an indoor environment can take place.
Table 2 shows the advantages and disadvantages of the various methodologies presented up to now.
As can be seen from this table, the use of the RSS-based method is much simpler, more intuitive, less expensive than the other algorithms and, moreover, it is not necessary to synchronize the various devices with each other. Comparing instead the technologies of Table 1, it is understood how it is preferable—for power consumption, costs and accuracy—to exploit Bluetooth technology.
The Development of Bluetooth Technology
Bluetooth is a short-range wireless transmission standard, developed by the Blue-tooth Special Interest Group—SIG, operating at frequencies between 2.4 GHz and 2.485 GHz, which allows multiple devices to communicate and exchange data and information. of any kind. The first versions marketed guaranteed data exchanges between devices at a maximum speed of about 723.1 Kbit/s, while with subsequent releases (Bluetooth 2.0 and Bluetooth 4.0), the amount of data exchanged in a single second was increased. This technology is very useful and used thanks to its very low consumption: precisely because of this characteristic, combined with the low cost of Bluetooth devices, it was decided to take advantage of this technology. The devices that make up the indoor localization system communicate with each other via Bluetooth connection, providing the necessary data to be able to calculate the coordinates of the position later on. The main advantages, however, can be summarized in three points:
- Complete absence of cables and wires: Bluetooth allows, in fact, direct communication between various devices without the need for further connections;
- Limited cost;
- Complete automation.
The Bluetooth standard can be divided into three types of classes, each of which have a different range, as shown in Table 3.
As can be seen from the table, this technology can reach an action range of up to 100 m, thus making it very useful in an indoor environment. As regards the estimation of the position, Bluetooth is exploited using a system consisting essentially of a Bluetooth module that acts as a detector (in slave mode) and other devices (set in master mode) called beacons of which the location in the area of interest. The position estimation can be determined starting from the signal strength that each master device detects from slave devices. The main advantage of this technology, as previously mentioned, depends both on the low power consumption, but also on the easy availability of hardware; most of the devices available on the market today, such as smartphones, tablets and computers, integrate within them already the Bluetooth standard [29,30]. The disadvantage, on the other hand, is the countless interferences that the system can suffer. In a very small and limited area, any type of obstacle, whether it is a person or any other device, can limit and therefore decrease the accuracy when measuring the signal strength. This limit translates into an estimate of the wrong, or at least different from the actual, position [31].
4. The Proposed Approach
Authors should discuss the results and how they can be interpreted from the perspective of previous studies and of the working hypotheses. The findings and their implications should be discussed in the broadest context possible. Future research directions may also be highlighted.
Indoor localization can generally be approached in two different ways:
- Precise Indoor Localization (PIL);
- Zone-Based Indoor Localization.
The first approach requires the exact identification of the user’s position with an accuracy below one meter. However, to obtain a precise position, the beacons are not sufficient. In fact, it is necessary to use additional instruments, such as an accelerometer, which can be used to calculate the distance travelled by the user over time; a compass, which can be used to know the user’s direction at any time; or a gyroscope that can provide information on user rotation change.
The second approach is based on the subdivision of the area of interest into N-zones and then identifying in which n-th zone the user is present. Bluetooth low-energy devices, due to the large variations in the RSS parameter that leads to a distance calculation subject to errors, do not allow precise localization; therefore, the zone-based approach must be used.
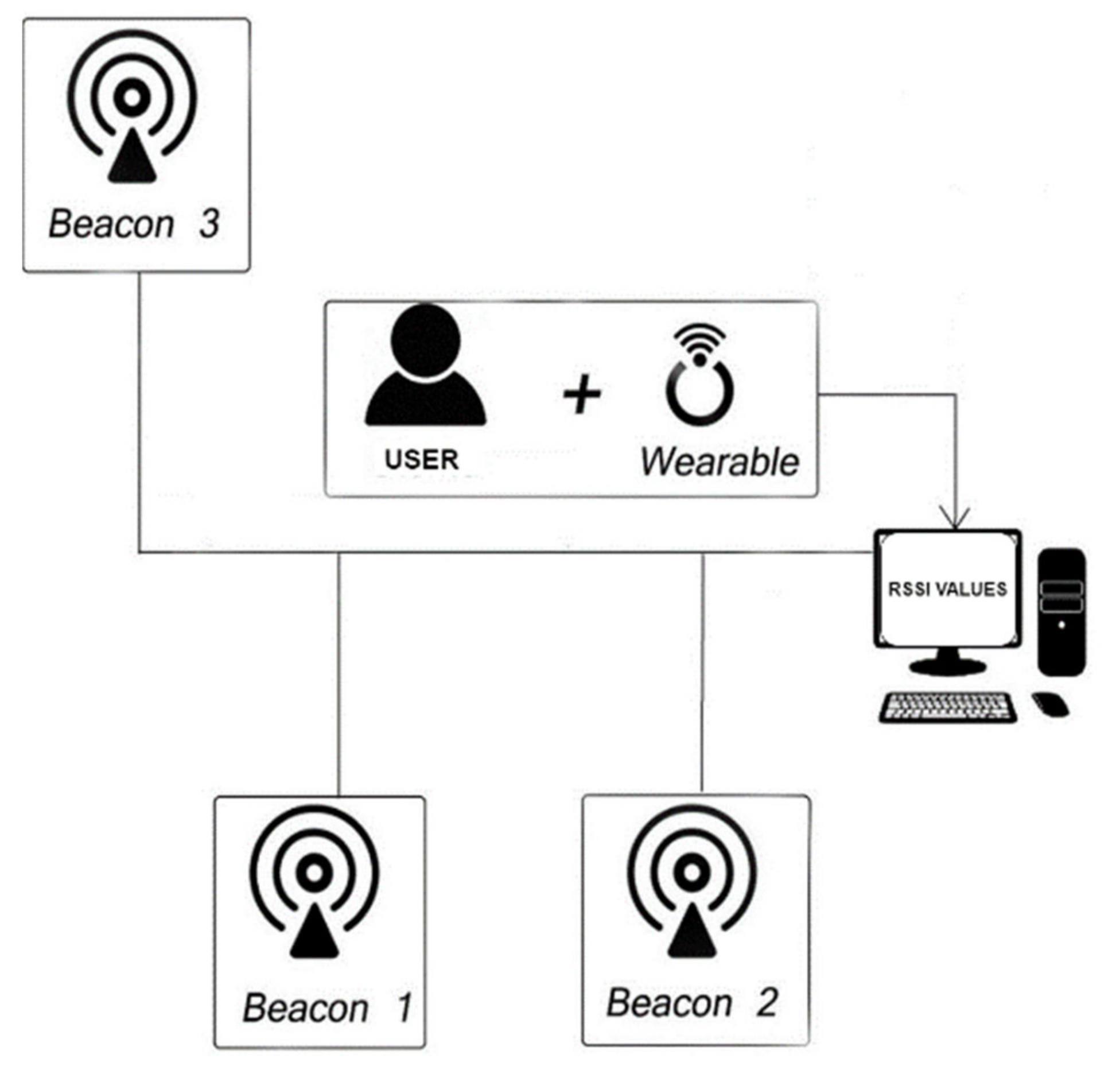
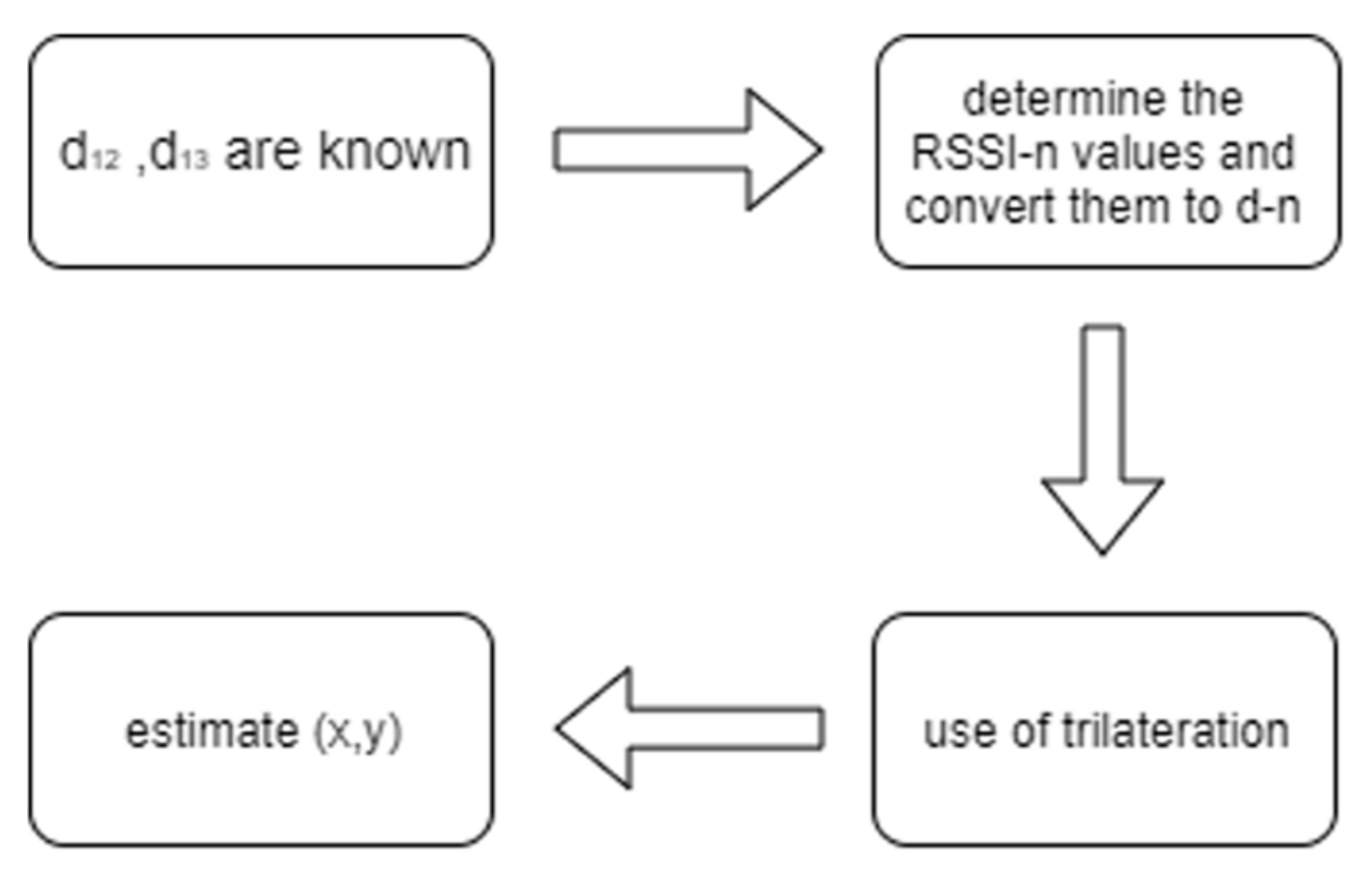
The starting idea is to exploit a system consisting of three master devices to obtain the RSSI values relating to the single slave device to be located and convert these values into distance. Each master, positioned in known points a priori, obtains and processes the RSSI values by converting the signal power value into distance. Processing takes place via a microprocessor that receives RSS values as input, returning as output the value of the distance between the mobile node and the fixed node whose position in space is known. Subsequently, using the trilateration technique, the coordinates (x, y) are obtained by means of a program written in C language. The aim of the project is to create a system for locating the position of a user in an indoor environment in the area of interest. To develop this system, it is necessary to first define the type of architecture to be used within the indoor structure of interest: you can imagine designing a generic hardware system, having the configuration as shown in Figure 1. As can be understood from the figure, the user will have to wear a wearable that is able to be detected via Bluetooth connectivity by the master modules. Each reference device will have to receive RSS values from the wearable, convert them into distance and store them in a text file.
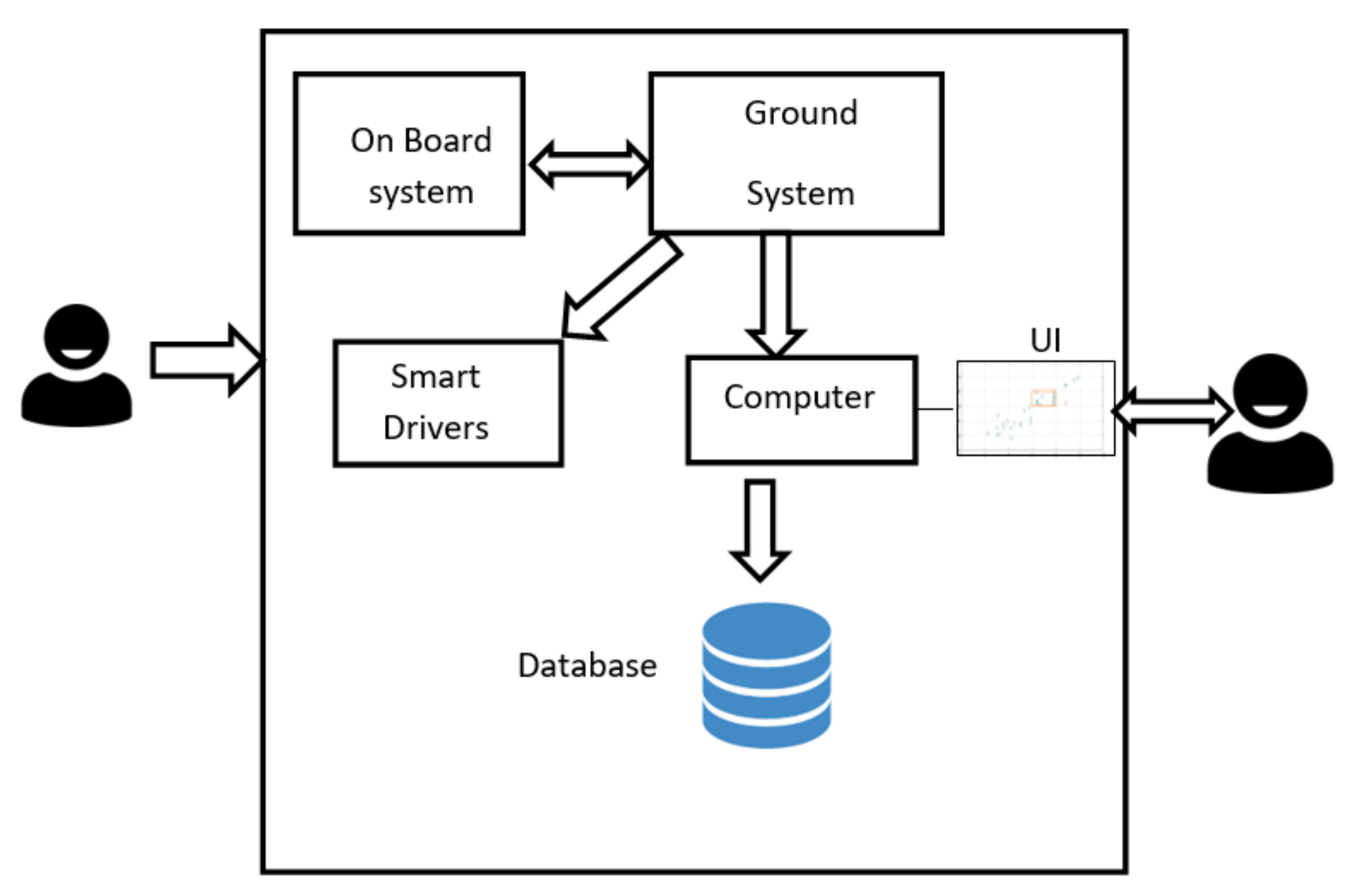
When we talk about a generic electronic system, it is necessary to define and analyze both the hardware side and the software side in order to better understand its operation. The project has as its main objective the creation of an indoor localization system that uses Bluetooth modules for user localization. The system, as we will see, foresees a certain number of reference nodes—positioned in points known a priori—and a mobile node. The first paragraph describes all the devices used and shows the various connections made. Subsequently, the development environment for programming the Arduino boards will be shown. Finally, the last paragraph describes the environmental characterization; then the values of the signal propagation constant and the RSSI at 1 m from the source will be obtained. In Figure 2, the architecture of the proposed system is shown.
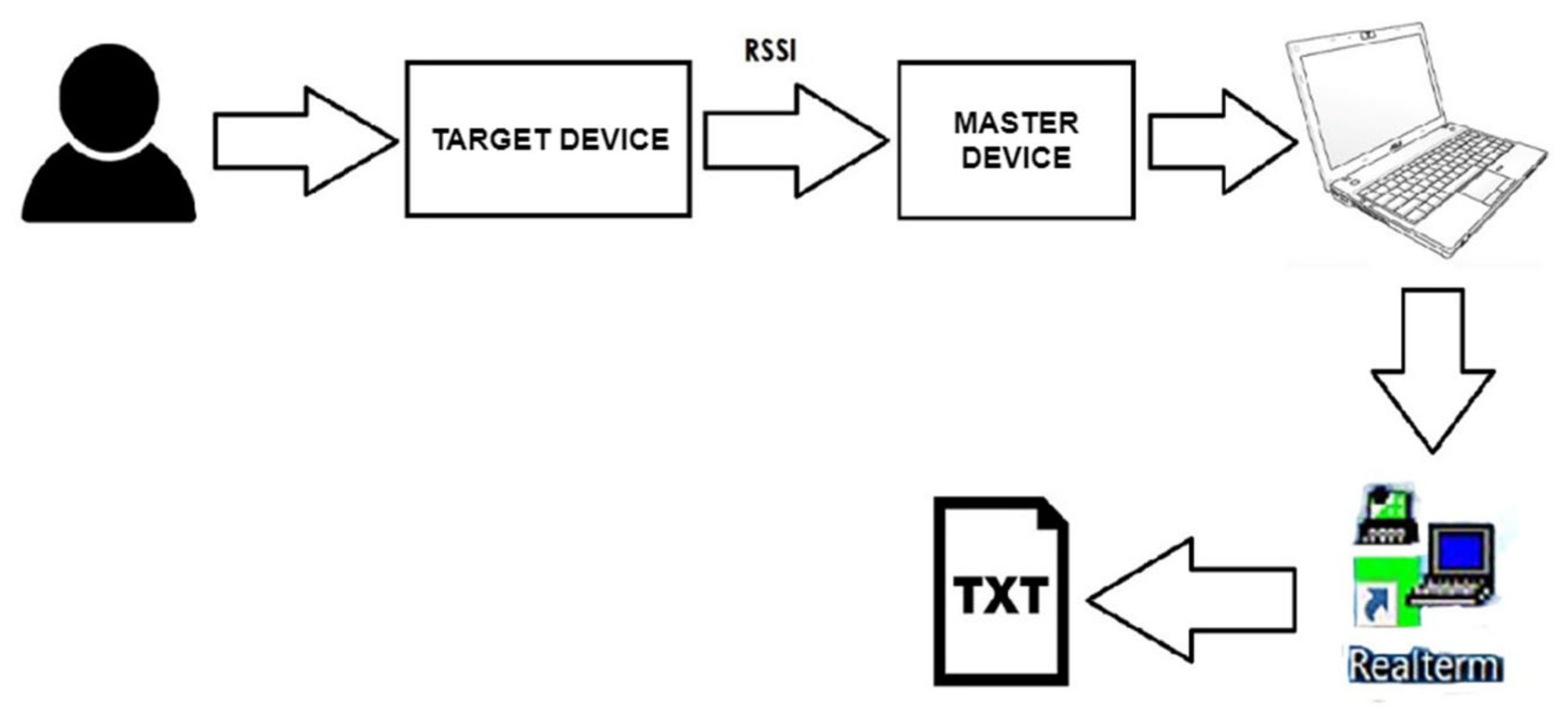
The on-board system represents the wearable device and corresponds to the device to be located, i.e., a battery-powered HC-05 Bluetooth module. The ground system is composed of the three reference Bluetooth modules, each managed by an Arduino Pro-Mini (smart drivers) and by the computer, which reads the data via serial and stores them in a database. Then, through a program (Matlab or Excel), the expert user can graphically view the results obtained. Therefore, the UI block—acronym for user interpretation—represents the graphic display of the stored data. In Figure 3, instead, the framework of the system is represented.
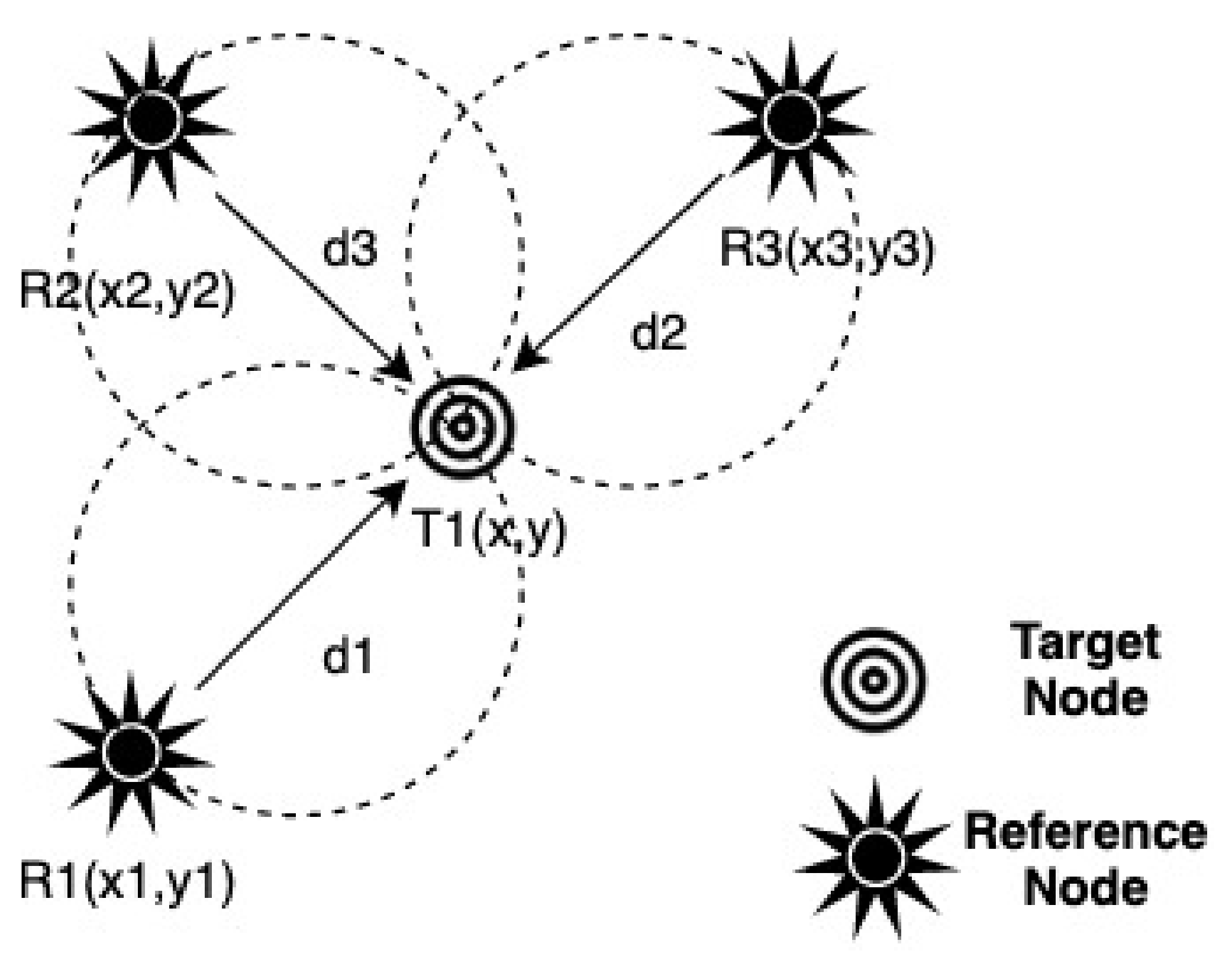
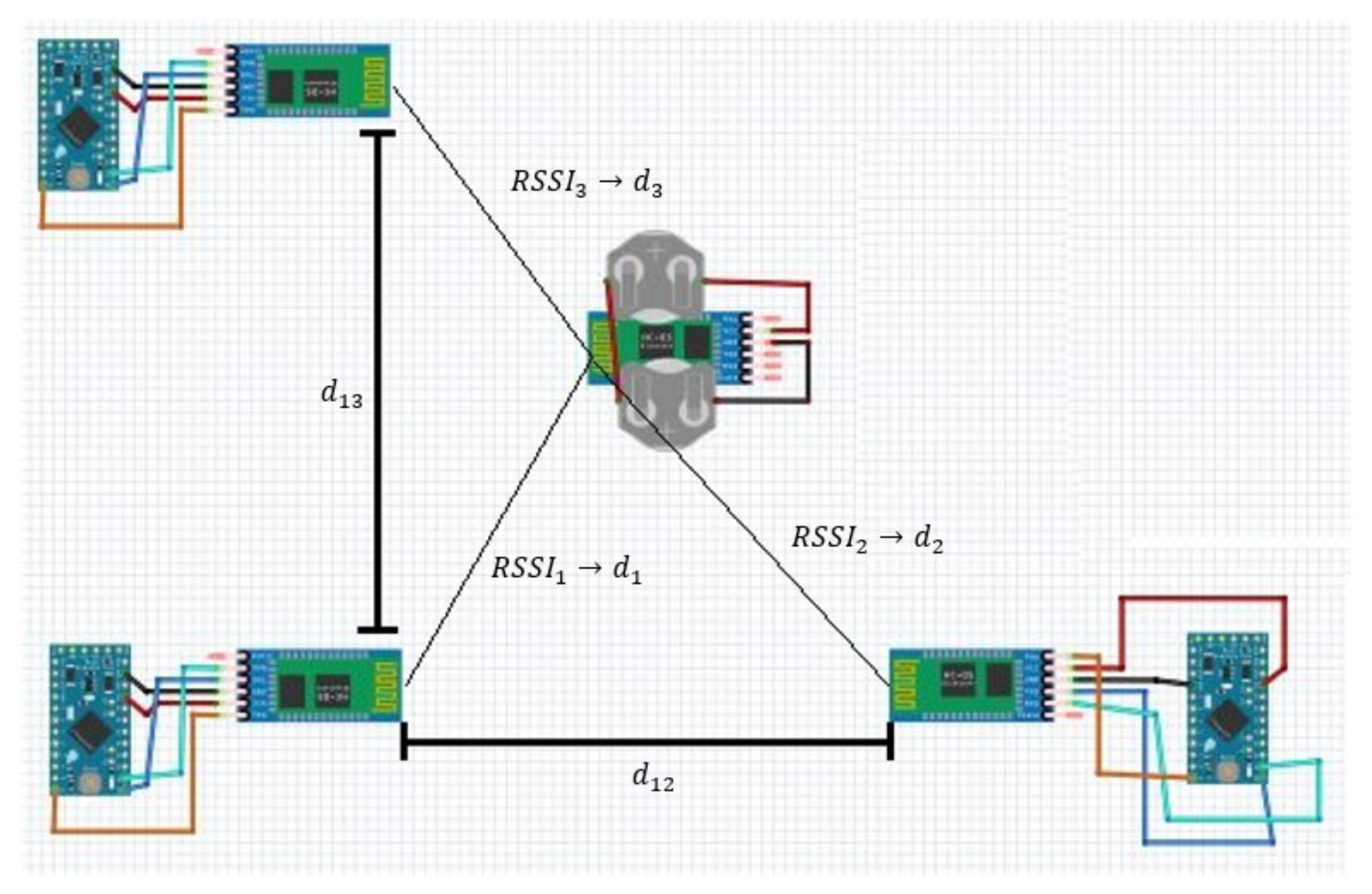
Therefore, to identify a target object, it is necessary to have at least three master objects that identify the space in which the target is located. To do this, the trilateration technique was used in our system. In a two-dimensional plane, at least three sensors must be used and positioned in the plane to ensure that the measurement is unique. Under these conditions, the technique can be defined as hyperbolic trilateration. This technique guarantees that we can find a target position using the di RSSI signal between it and three other devices’ (master) known positions and the time response with the target message.
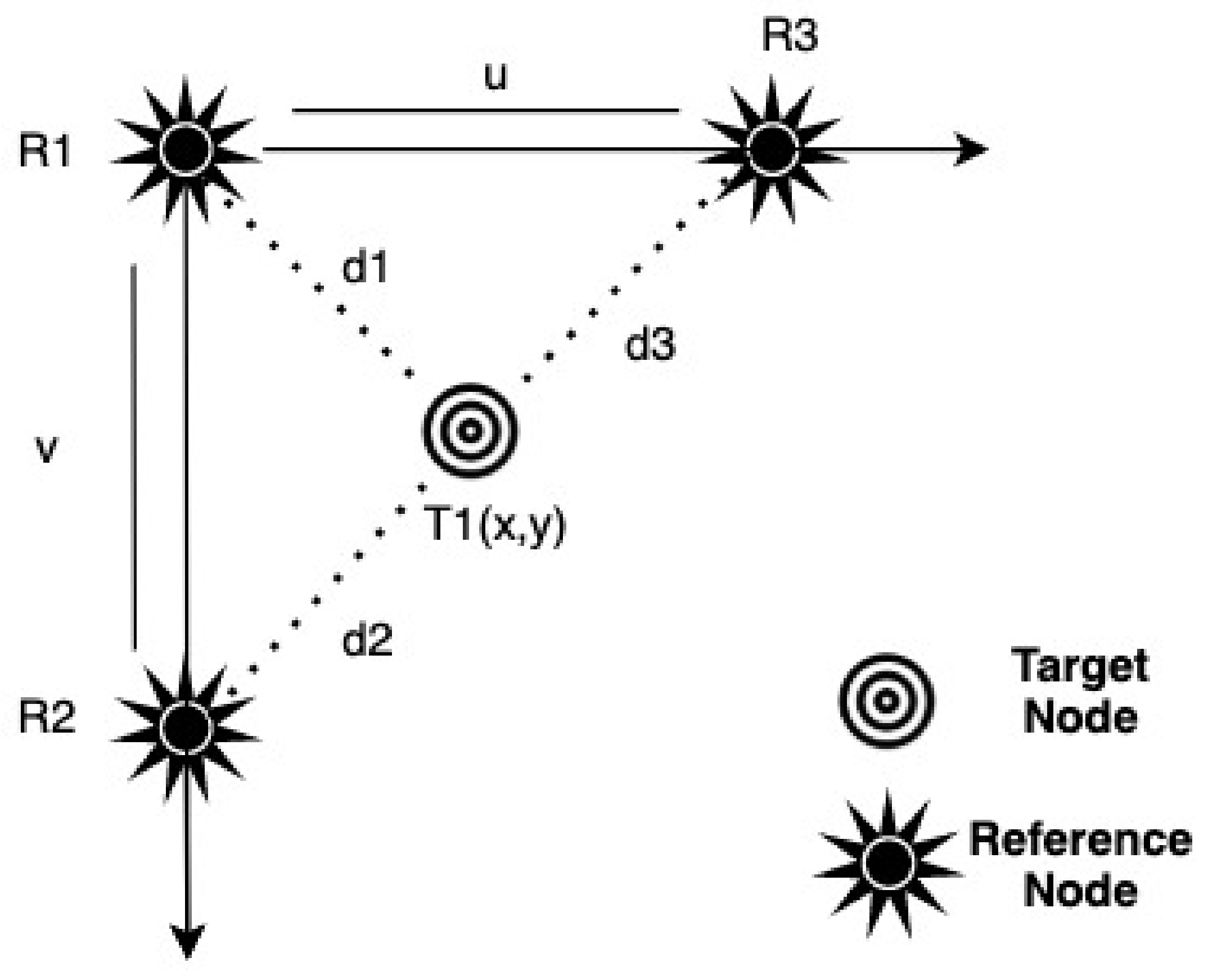
Figure 4 shows the same technique but using both the intersection between three circles and the a priori knowledge of the coordinates of the reference beacons.
Using this system, it is possible to obtain the (x, y) coordinates of the target node:
If the three beacons have the following coordinates ,,, as shown in Figure 5, the system is simplified in the following way:
This method is very simple, useful and convenient, as the x and y coordinates can be easily obtained starting from the values of the distances, obtained through the RSS parameter of the reference beacons with respect to the target node.
5. Case of Study
The architecture of the system described in the previous paragraph (see Figure 2) is essentially based on four fundamental components:
- Four Bluetooth HC-05 modules comprising three anchors, or reference nodes (set in master mode), and one target (set in slave mode);
- The Arduino Pro Mini to manage and control the HC-05 master Bluetooth modules, which provide the RSSI values of the slave device;
- A coin cell breakout w/on–off switch (with 3 V CR2032 batteries) to power the HC-05 module, which acts as a slave;
- A computer to manage and process the values obtained from the exchange of information between the master and slave modules.
The Bluetooth module used is the HC-05. It is a Bluetooth module that is programmable via AT commands and can be used in both master and slave modes. The commands AT + ROLE = 1 and AT + ROLE = 0 allow setting the master mode and the slave mode, respectively. Specifically, as already mentioned, four HC-05 Bluetooth modules are used: three in master mode, to be able to scan and search for other Bluetooth devices, and one in slave mode to be searched by the master modules. An Arduino Pro Mini is used to power and control the HC-05 master modules. The choice to use this card lies in the fact that it is compact and small, and therefore not bulky for applications and installations in small spaces. By connecting the board to the computer via these two components, it is possible to load any type of program using the development environment described in the next paragraph. Through the hardware connections between the HC-05 Bluetooth module and the coins cell for the wearable device, and between the Arduino Pro Mini board and the HC-05 Bluetooth module, it is possible to power the devices to make them wearable. The series connection between the two CR2032 batteries allows for a total voltage of 6 V, the maximum power voltage allowed for the HC-05 Bluetooth module. In practice, this device acts only as a transmitter: it is the master devices that receive and process the data on the RSS value. Figure 6 shows the algorithm used in the proposed indoor localization system, while Figure 7 shows the complete system, including the three master Bluetooth modules and the slave Bluetooth module, to be located.
The programming of the Arduino Pro Mini takes place through the use of a dedicated development environment, called IDE—Integrated Development Environment. The program, written in C and defined in sketch, always contains two functions, setup () and loop (), which contain both the settings necessary for the correct functioning of the devices that can be connected to the Arduino Pro Mini board and the instruction blocks to carry out what is required. The setup () function is used not only to initialize variables but also to set up serial communications.
After the creation of the setup () function, which initializes and sets the initial values, the loop () function cyclically executes the program defined within it: it represents the main function that will be repeated indefinitely until the board is turned off. After writing all the code, we move on to the compilation phase, which, unlike the C language, is translated and completed essentially in the phase of loading the code on the board itself. In order to view the output, and therefore the result of the compiled code, it is necessary to use the serial monitor, defined in the Arduino development environment, by first clicking on the “serial monitor” button and then selecting the same speed, in baud, used in the serial call in order to be able to communicate correctly with the device. In order to obtain the information about the RSSI value from the slave device, it is necessary to define the necessary commands in the setup () function so that the HC-05 module can be enabled to search for other Bluetooth devices. Subsequently, in the loop () function, the AT + INQ command is sent to the master Bluetooth module to allow the scan to begin. When the master recognizes the address of the slave device to be located, the program returns the following:
- RSSI value in dBm;
- Distance in centimeters between the slave module and the master;
- Total time from the start of the program execution.
The serial communication of the three master devices is opened through the Realterm program. The choice to use this serial monitor is linked to the fact of being able to save all the processed content easily and quickly in a text file. Thus, three files are available: subsequently, through an additional program written in C, the data present within the files are processed to obtain the coordinates (x, y), using the trilateration method, as seen in the previous chapter. The program ends by storing the obtained coordinates in a new text file. To be able to plot these coordinates on a Cartesian axis, MATLAB and Microsoft Excel are used. The uploaded code, on every single Arduino Pro Mini must do the following:
- Initialize a serial communication;
- Set the Bluetooth in master mode;
- Enable Bluetooth so that it can search for other Bluetooth devices;
- Return the RSS value;
- Convert the received signal strength into distance.
6. Experimental Results
This chapter shows the results obtained from the experimental tests carried out in a closed place without interference, considering a well-defined area. For each distance, the reference nodes, in automatic and continuous mode, scan the mobile node obtaining the RSSI parameter converted into distance. The data obtained are saved in a text file via serial connection and subsequently managed in order to obtain the coordinates (x, y). In order to better evaluate the indoor localization methodologies, it is necessary to take into account a set of metric parameters, such as precision, recall, accuracy and F1-score.
The source code loaded on the cards allows to take advantage of the AT mode of the HC-05 module and to initialize the device so that it can perform a Bluetooth scan. Once you have loaded the sketch on the Arduino Pro Mini you have to:
- Choose the area of interest and divide it into N-zones;
- Make the connection as shown in Figure 7;
- Connect the Arduino Pro Mini boards to the pc via the FTDI adapter and USB cable;
- Open the serial monitors using a computer in order to store the RSSI values obtained from each single reading in a file, in txt format;
- Perform the tests by placing the slave in the selected area, starting the three reference devices simultaneously.
Once the slave module is turned on, the three reference modules, positioned at known distances from each other, provide an indication of the RSS value of the Bluetooth module to be located. The power value of each single master is very important as it allows you to determine the distance between the reference Bluetooth module and the target Bluetooth. The conversion from RSSI value to distance is done through the following steps:
- LISTA Read RSSI value: The master devices get the RSS value from the scan of the target Bluetooth module;
- LISTA Distance calculation: Once the RSS value in dBm is obtained, the distance can be calculated, using the formula . In order to convert the RSSI value into distance, it is necessary to perform a calibration test in order to define both the RSSI value at a distance of 1 m from the source and the value of the signal propagation constant. The knowledge of these two parameters allows the conversion from dBm to meters.
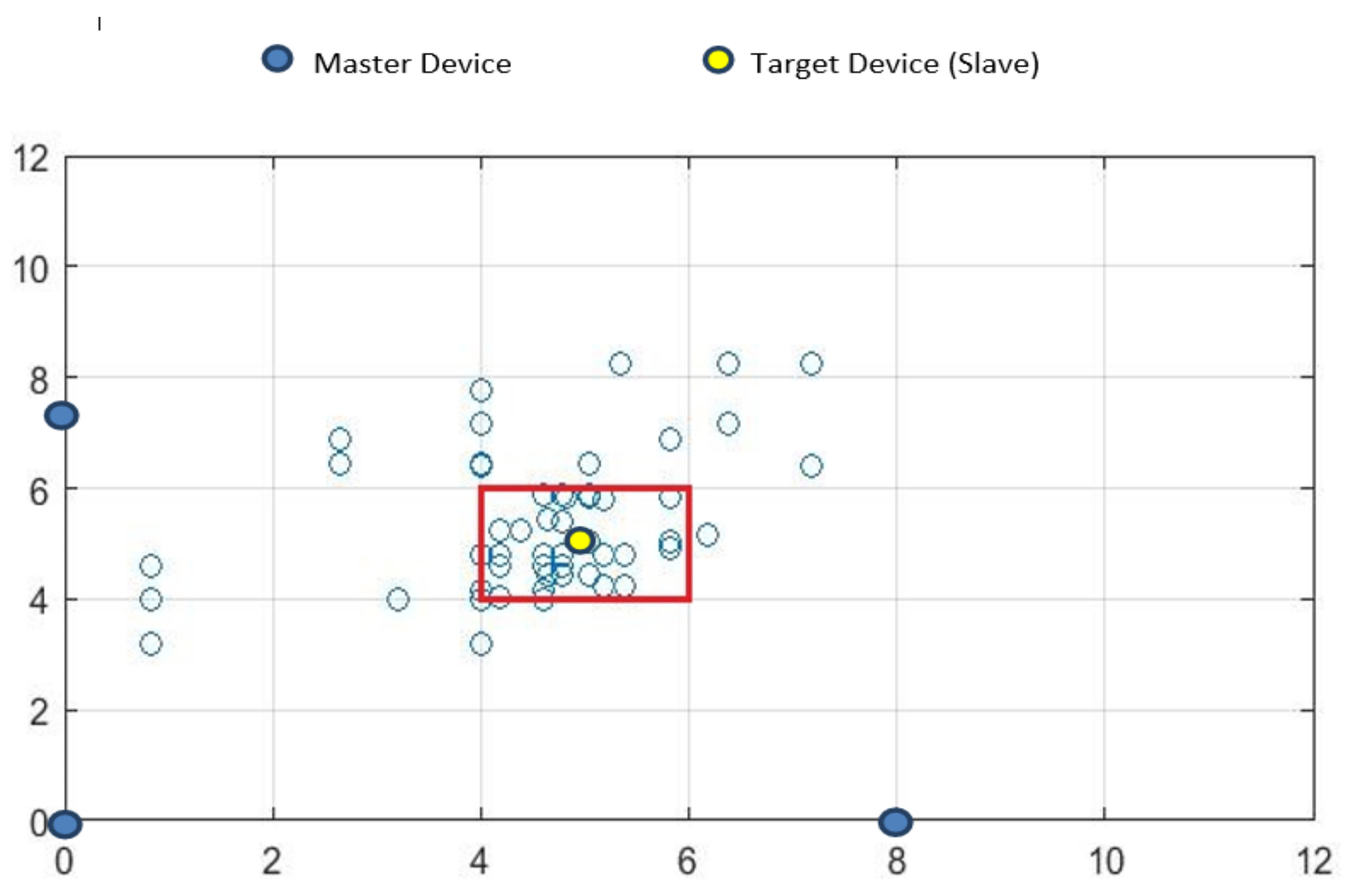
To achieve the final goal, several tests were carried out to test the behavior of the RSSI values of the master devices as a function of the coordinates (x, y). The experimental tests carried out were carried out by holding the wearable device still in a specific area. A static test was carried out by placing the master devices at 8 m each and dividing the area into 16 zones of area 2 × 2 m, as shown in Table 4.
The choice to use this initial arrangement is linked to the fact that the HC-05 devices transmit at a maximum distance of 10 m: at the extreme points, in fact, the slave is just over 10 m away from the masters. A total of 60 measurements were made for each single zone. Taking into consideration the zone (3; 3) it can be seen from Figure 8 the presence of a high number of coordinates outside the reference zone.
The values that fall within the marked area are defined as true positives (true positive—TP), while those outsides are called false negatives (false negative—FN). To determine all the parameters for the calculation of precision, recall, accuracy and F1-score, all the areas adjacent to the area under examination are then considered. False positives are all those measures associated with the adjacent areas which, erroneously, are positioned within the area considered (false positive—FP); the external ones, however, are defined as true negatives (true negative—TN), intended as errors of classification. The dispersion of the data is caused by measurement errors: a small error on each single beacon, even of 1 dBm, corresponds to a large error of the coordinates (x, y). The knowledge of the values defined as true negatives, on the other hand, allows the calculation of the accuracy. The following Table 5 summarizes the values of true positives (TP), false negatives (FN), false positives (FP) and true negatives (TN). In order to evaluate its performance, taking into consideration one area at a time, tests were carried out verifying the correct classification of the target based on the position in which it was located (whether inside the area or outside). In fact, the tests conducted statically were carried out by randomly varying the presence of the target inside and outside the area.
In order to evaluate the test conducted, the precision, recall, accuracy and F1-score values were calculated for each zone and the average was then made for each parameter:
From this experimental phase, it is possible to verify how it is possible to carry out, in the absence of interference sources, that the proposed method lends itself to these types of wearable applications. It is also evident that everything depends very much on the RSSI readings, as in the three masters, a stable and constant localization is not allowed but readings are provided in terms of coordinates (x, y), which are incorrect, greatly compromising the precision. The problem is due to the fact that the value of the detected power signal depends on both the device and the area in which you want to locate the slave device. Therefore, it is essential that the environment is free of interference. Although the performances obtained are valid, these provide us with valid elements of discussion to make changes in order to improve the system. A first could be, being that the outermost areas affected by the greatest error, the addition of a fourth component that can better trilaterate the signal. Another possible improvement could be to use devices with better signal strength for the masters.
7. Discussions
Location solution applications provide the interface for location data and enable you to use the solution in your business. Generally, applications are built from the various ways of using location data. The applications for indoor localization concern various fields, such as industrial (localization of products, equipment) [32], logistics (localization of goods, pallets, forklifts, trans pallets, and inventory in real time) [33], access control (localization of people and access permits) [34], health and assistance (localization of medical equipment, health workers, patients) [35], sports (tracking the movements and trajectories of athletes) and many others [36]. It is possible to foresee many of their applications in context aware computing, especially as regards recommender systems [37] in the automotive field for the localization and analysis of data in tunnels and places, where the GPS signal is not present [38]. In the field of cultural heritage, using contextual apps for visits to places of interest is possible to help the user to have the right information and the right path to their location [39].
In all cases, it is possible to foresee approaches based on real-time displacements, to record them, to review them and to analyze their history (trajectories, speeds, and heat maps). Some possible domain applications range from the content we are in to the following different areas [40,41,42]:
- Asset management—localization, management and commercial use of any tangible asset owned by a company or a private individual.
- Supply chain management—management of companies and interconnected processes related to the production, distribution and sale of products and ser-vices. It includes inventory and warehouse management.
- Detection and Monitoring—integration of sensors (e.g., data loggers) used to monitor the physical environment of an object. The most common sensors are those of temperature and humidity.
- Maintenance, repair and overhaul (MRO)— all the activities, technical and administrative, conducted to ensure that an object (tools, equipment, vehicles) is able to perform the function required of it.
- Compliance—act or process of adhering to a request or regime specified by a government, industry, or customer.
- Safety/security—safety and security management, assurance and compliance for a company, its employees, its resources, its products and processes. Among the most common applications, we find workplace safety, the management of evacuation and emergency procedures.
- Workflow optimization—optimizing efficiency for a company’s workflow. For example, in an automobile manufacturing plant, the goal is to minimize the steps to get from point A to point B of the production process, or to ensure that when it gets to point B, a worker has XYZ available to do the job properly.
- Manufacturing—asset traceability, maintenance and repair (MRO), material supply, safety/security, supply chain management, and materials in process.
- Logistics—sorting, inventory/warehouse management, security/protection, supply chain management, and loading/unloading management.
- Transportation—use of resources, automated detection and monitoring, loading, intervention times for maintenance, packaging, safety (unaccompanied minors), and traceability of vehicles.
- Retail—asset tracking, inventory, supply chain management, and warehouse management.
- Healthcare—asset traceability, compliance, patient flow, safety, and workflow optimization.
- Sport—monitoring the score of players.
The traceability of people is a very strong theme today. This strongly supports the discussion that there is a need to implement new models of use of contents that can keep up with the times.
8. Conclusions
In this article, we showed the techniques, methods and applications for an indoor localization; we propose an approach to develop a system that is able to localize a target in an indoor condition. It is seen that in modern applications, the best performance is obtained using a system based solely on Bluetooth modules, where it is necessary to use a zone-based approach. The advantage lies in the fact that this type of approach supports a range of RSSI values for each zone and, therefore, it is intuitive to understand what type of movement is made. These approaches are susceptible to improvements. In addition to being used for simple internal positioning, it can be applied, later, to create a more complex, complete and precise system, using Wi-Fi and UWB or a combination of different technologies that allows you to track, for example, a basketball player on the court. In this case, the system can be modified to take advantage of a precise indoor localization approach, exploiting—in addition to simple beacons—additional devices, such as accelerometers and gyroscopes.
Author Contributions
F.P., E.A.A., M.A., V.G. and A.S.; methodology: F.P., E.A.A., M.A. and A.S.; formal analysis: E.A.A.; investigation: F.P.; resources: A.S.; data curation: F.P.; writing—original draft preparation: E.A.A. and M.A.; writing—review and editing: F.P. and V.G.; visualization: E.A.A., V.G. and A.S.; supervision: F.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lombardi, M.; Pascale, F.; Santaniello, D. Internet of Things: A General Overview between Architectures, Protocols and Applications. Information 2021, 12, 87. [Google Scholar] [CrossRef]
- D’Aniello, G.; Gaeta, M.; Hong, T.P. Effective quality-aware sensor data management. IEEE Trans. Emerg. Top. Comput. Intell. 2017, 2, 65–77. [Google Scholar] [CrossRef]
- Castiglione, A.; Palmieri, F.; Colace, F.; Lombardi, M.; Santaniello, D.; D’Aniello, G. Securing the internet of vehicles through lightweight block ciphers. Pattern Recognit. Lett. 2020, 135, 264–270. [Google Scholar] [CrossRef]
- D’Aniello, G.; Gaeta, M.; Orciuoli, F.; Sansonetti, G.; Sorgente, F. Knowledge-based smart city service system. Electronics 2020, 9, 965. [Google Scholar] [CrossRef]
- Colace, F.; Lombardi, M.; Pascale, F.; Santaniello, D. A Multilevel Graph Representation for Big Data Interpretation in Real Scenarios. In Proceedings of the 2018 3rd International Conference on System Reliability and Safety (ICSRS), Barcelona, Spain, 23–25 November 2018; pp. 40–47. [Google Scholar] [CrossRef]
- Erhan, L.; Ndubuaku, M.; di Mauro, M.; Song, W.; Chen, M.; Fortino, G.; Bagdasar, O.; Liotta, A. Smart anomaly detection in sensor systems: A multi-perspective review. Inf. Fusion 2021, 67, 64–79. [Google Scholar] [CrossRef]
- Colace, F.; Lombardi, M.; Pascale, F.; Santaniello, D. A multi-level approach for forecasting critical events in Smart Cities. In Proceedings of the 24th International DMS Conference on Visualization and Visual Languages, Redwood City, CA, USA, 29 June 2018; pp. 45–46. [Google Scholar]
- Zafari, F.; Papapanagiotou, I.; Devetsikiotis, M.; Hacker, T. Enhancing the accuracy of iBeacons for Indoor Proximity-based services. In Proceedings of the IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Hou, X.; Arslan, T. Monte Carlo localization algorithm for indoor positioning using Bluetooth low energy devices. In Proceedings of the 2017 International Conference on Localization and GNSS (ICL-GNSS), Nottingham, UK, 27–29 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Colace, F.; Khan, M.; Lombardi, M.; Santaniello, D. A Multigraph Approach for Supporting Computer Network Monitoring Systems. In Proceedings of Fifth International Congress on Information and Communication Technology; Springer: Singapore, 2021; pp. 470–477. [Google Scholar]
- Ding, H.; Zheng, Z.; Zhang, Y. AP weighted multiple matching nearest neighbors approach for fingerprint-based indoor localization. In Proceedings of the 2016 Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, China, 2–4 November 2016; pp. 218–222. [Google Scholar] [CrossRef]
- Miorandi, D.; Sicari, S.; de Pellegrini, F.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef] [Green Version]
- Dardari, D.; Closas, P.; Djurić, P.M. Indoor Tracking: Theory, Methods, and Technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef] [Green Version]
- Disha, M.A. A Comparative Analysis on indoor positioning Techniques and Systems. Int. J. Eng. Res. Appl. 2013, 3, 1790. [Google Scholar]
- Radoi, I.E.; Cirimpei, D.; Radu, V. Localization Systems Repository: A Platform for Open-source Localization Systems and Datasets. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Gupta, N. Inside Bluetooth Low Energy; Artech House, Mobile Communication Series: London, UK, 2013; ISBN-13:978-1630810894. [Google Scholar]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Farid, Z.; Nordin, R.; Ismail, M. Recent Advances in Wireless Indoor Localization Techniques and System. J. Comput. Netw. Commun. 2013, 2013, 185138. [Google Scholar] [CrossRef]
- Thongkam, J.; Supanakoon, P.; Promwong, S. Evaluation of Indoor Localization with Range-Free Weighted Localization Algorithm. In 2018 Global Wireless Summit (GWS); IEEE: New York, NY, USA, 2018; pp. 11–14. [Google Scholar] [CrossRef]
- Hatem, E.; Colin, E.; Abou-Chakra, S.; El-Hassan, B.; Laheurte, J. New Empirical Indoor Path Loss Model using Active UHF-RFID Tags for Localization Purposes. In Proceedings of the 2018 IEEE International Conference on RFID Technology & Application (RFID-TA), Macau, Macao, 26–28 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Hatem, E.; El-Hassan, B.; Laheurte, J.; Abou-Chakra, S.; Colin, E.; Marechal, C. Study the estimated distance error in indoor localization using UHF-RFID. In Proceedings of the 2018 IEEE Middle East and North Africa Communications Conference (MENACOMM), Jounieh, Lebanon, 18–20 April 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Buyya, R.; Dastjerdi, A.V. Internet of Things: Principles and Paradigms; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Wei, S.; Wang, J.; Zhao, Z. LocTag: Passive WiFi Tag for Robust Indoor Localization via Smartphones. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 1342–1343. [Google Scholar] [CrossRef]
- Xue, J.; Liu, J.; Sheng, M.; Shi, Y.; Li, J. A WiFi fingerprint based high-adaptability indoor localization via machine learning. China Commun. 2020, 17, 247–259. [Google Scholar] [CrossRef]
- Poulose, A.; Emeršič, Ž.; Eyobu, O.S.; Han, D.S. An Accurate Indoor User Position Estimator for Multiple Anchor UWB Localization. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 21–23 October 2020; pp. 478–482. [Google Scholar] [CrossRef]
- Razali, N.A.M.; Habaebi, M.H.; Zulkurnain, N.F.; Islam, M.R.; Zyoud, A. The Distribution of Path Loss Exponent in 3D Indoor Environment. Int. J. Appl. Eng. Res. 2017, 12, 7154–7161. [Google Scholar]
- Pu, C.C.; Pu, C.H.; Lee, H.J. Indoor Location Tracking using Received Signal Strength Indicator. In Emerging Communications for Wireless Sensor Networks; IntechOpen: London, UK, 2011. [Google Scholar]
- Obeidat, H.; Obeidat, O.; Bombara, M.; Shuaieb, W.; Alabdullah, A.; Dama, Y.; Binmelha, M.; Jones, S.; Abd-Alhameed, R. Performance comparative study between vector and ECOLOCATION algorithms for indoor positioning. In Proceedings of the 2017 Internet Technologies and Applications (ITA), Wrexham, UK, 12–15 September 2017; pp. 230–234. [Google Scholar] [CrossRef]
- Mehmood, H.; Tripathi, N.K.; Tipdecho, T. Indoor Positioning System Using Artificial Neural Network. J. Comput. Sci. 2010, 6, 1219. [Google Scholar] [CrossRef] [Green Version]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A Survey of Enabling Technologies for Network Localization, Tracking, and Navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef] [Green Version]
- Khudhair, A.A.; Jabbar, S.Q.; Sulttan, M.Q.; Wang, D. Wireless Indoor Localization Systems and Techniques: Survey and Comparative Study. Indones. J. Electr. Eng. Comput. Sci. 2016, 3, 392–409. [Google Scholar] [CrossRef] [Green Version]
- Colace, F.; de Santo, M.; Lemma, S.; Lombardi, M.; Pascale, F. BotWheels: A Petri Net based Chatbot for Recommending Tires. In Proceedings of the 6th International Conference on Data Science, Technology and Applications (DATA), Madrid, Spain, 26–28 July 2017; pp. 350–358. [Google Scholar] [CrossRef]
- Peng, Z.; Xie, Y.; Wang, D.; Dong, Z. One-to-all regularized logistic regression-based classification for WiFi indoor localization. In Proceedings of the 2016 IEEE 37th Sarnoff Symposium, Newark, NJ, USA, 19–21 September 2016; pp. 154–159. [Google Scholar] [CrossRef]
- Casillo, M.; Coppola, S.; de Santo, M.; Pascale, F.; Santonicola, E. Embedded Intrusion Detection System for Detecting Attacks over CAN-BUS. In Proceedings of the 2019 4th International Conference on System Reliability and Safety (ICSRS), Rome, Italy, 20–22 November 2019; pp. 136–141. [Google Scholar] [CrossRef]
- Casareo, K.; Chaczko, Z. Beacon-Based Localization Middleware for Tracking in Medical and Healthcare Environments. In Proceedings of the 2018 12th International Symposium on Medical Information and Communication Technology (ISMICT), Sydney, Australia, 26–28 March 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Kirkup, J.A.; Rowlands, D.D.; Thiel, D.V. Team Player Tracking Using Sensors and Signal Strength for Indoor Basketball. IEEE Sens. J. 2016, 16, 4622–4630. [Google Scholar] [CrossRef]
- Amato, F.; Moscato, F.; Moscato, V.; Pascale, F.; Picariello, A. An agent-based approach for recommending cultural tours. Pattern Recognit. Lett. 2020, 131, 341–347. [Google Scholar] [CrossRef]
- Adinolfi, E.A.; Gallo, M.; Polverino, P.; Beretta, D.; Araya, S.S.; Pianese, C. ECM-Based Algorithm for On-Board PEMFCs Diagnosis. In ELECTRIMACS 2019; Lecture Notes in Electrical Engineering; Zamboni, W., Petrone, G., Eds.; Springer: Cham, Switzerland, 2020; Volume 697. [Google Scholar] [CrossRef]
- Lombardi, M.; Pascale, F.; Santaniello, D. An application for Cultural Heritage using a Chatbot. In Proceedings of the 2019 2nd International Conference on Computer Applications & Information Security (ICCAIS), Riyadh, Saudi Arabia, 1–3 May 2019. [Google Scholar] [CrossRef]
- Kui, W.; Mao, S.; Hei, X.; Li, F. Towards Accurate Indoor Localization Using Channel State Information. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Taichung, Taiwan, 19–21 May 2018. [Google Scholar] [CrossRef]
- Herrera, J.C.A.; Plöger, P.G.; Hinkenjann, A.; Maiero, J.; Flores, M.; Ramos, A. Pedestrian indoor positioning using smartphone multi-sensing, radio beacons, user positions probability map and IndoorOSM floor plan representation. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014. [Google Scholar] [CrossRef]
- Zhang, C. Sparse Visual Localization in GPS-Denied Indoor Environments. In Proceedings of the 2019 International Conference on Information Technology and Computer Application (ITCA), Guangzhou, China, 20–22 December 2019. [Google Scholar] [CrossRef]
Figure 1.
The proposed approach.

Figure 2.
System architecture.

Figure 3.
System framework.

Figure 4.
Localization based on the trilateration method.

Figure 5.
Trilateration with 3 beacons.

Figure 6.
Algorithm for the calculation of coordinates.

Figure 7.
Indoor localization system proposed.

Figure 8.
Test on zone (3; 3).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Overview on indoor localization systems.
| Technology | Accuracy | Power Consumption | Cost |
|---|---|---|---|
| Wi-Fi | ~1–5 m | High | Low |
| Bluetooth | from 30 cm up to a few meters | Low | Low |
| RFID | ~1–5 m | Low | Active: High Passive: Low |
| UWB | ~1–5 m | Low | High |
Table 2.
Advantages and disadvantages of indoor localization algorithms.
| Method | Benefit | Downside |
|---|---|---|
| ToA | It represents the most accurate technique in terms of precision | It is complex to implement; requires synchronization of all devices; expensive |
| TDoA | Compared to the ToA, it requires the synchronism of the reference devices only | It is affected by multipath phenomena |
| AOA | The transmitter timing information is encoded in the signal | It requires the use of additional antennas to measure angles and therefore has a higher cost; multipath and reflection phenomenon |
| RSS | Very simple to implement; it does not require synchronization between devices; it requires no additional hardware | The presence of obstacles, the orientation of the antennas and the environment make it difficult to create an accurate model of indoor localization |
Table 3.
Bluetooth range.
| Name | Maximum Distance | Maximum Output Power |
|---|---|---|
| Class 1 | Until 100 m | 20 dBm = 100 mW |
| Class 2 | Until 10 m | 4 dBm = 2.5 mW |
| Class 3 | Until 5 m | 0 dBm = 1 mW |
Table 4.
Configuration and zoning.
| Beacon 3 | |||||
|---|---|---|---|---|---|
| (1;4) | (2;4) | (3;4) | (4;4) | ||
| (1;3) | (2;3) | (3;3) | (4;3) | ||
| (1;2) | (2;2) | (3;2) | (4;2) | ||
| 2 m | (1;1) | (2;1) | (3;1) | (4;1) | |
| Beacon 1 | 2 m | Beacon 2 |
Table 5.
TP, FN, FP e TN of Test.
| Area | TP | FN | FP | TN | Area | TP | FN | FP | TN | Area | TP | FN | FP | TN | Area | TP | FN | FP | TN |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (1;1) | 31 | 7 | 4 | 18 | (1;2) | 29 | 0 | 4 | 27 | (1;3) | 26 | 4 | 9 | 21 | (1;4) | 12 | 18 | 16 | 14 |
| (2;1) | 22 | 8 | 2 | 28 | (2;2) | 27 | 3 | 11 | 19 | (2;3) | 23 | 3 | 5 | 28 | (2;4) | 19 | 21 | 1 | 19 |
| (3;1) | 31 | 2 | 1 | 26 | (3;2) | 25 | 5 | 2 | 28 | (3;3) | 42 | 1 | 0 | 17 | (3;4) | 24 | 6 | 12 | 18 |
| (4;1) | 27 | 3 | 7 | 23 | (4;2) | 36 | 4 | 1 | 19 | (4;3) | 22 | 8 | 4 | 26 | (4;4) | 31 | 2 | 12 | 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Pascale, F.; Adinolfi, E.A.; Avagliano, M.; Giannella, V.; Salas, A. A Low Energy IoT Application Using Beacon for Indoor Localization. Appl. Sci. 2021, 11, 4902. https://0-doi-org.brum.beds.ac.uk/10.3390/app11114902
AMA Style
Pascale F, Adinolfi EA, Avagliano M, Giannella V, Salas A. A Low Energy IoT Application Using Beacon for Indoor Localization. Applied Sciences. 2021; 11(11):4902. https://0-doi-org.brum.beds.ac.uk/10.3390/app11114902
Chicago/Turabian StylePascale, Francesco, Ennio Andrea Adinolfi, Massimiliano Avagliano, Venanzio Giannella, and Andres Salas. 2021. "A Low Energy IoT Application Using Beacon for Indoor Localization" Applied Sciences 11, no. 11: 4902. https://0-doi-org.brum.beds.ac.uk/10.3390/app11114902
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.