
Switching Control Strategy for Oscillating Water Columns Based on Response Amplitude Operators for Floating Offshore Wind Turbines Stabilization




Abstract
:1. Introduction
2. Model Statement
2.1. FOWT Description
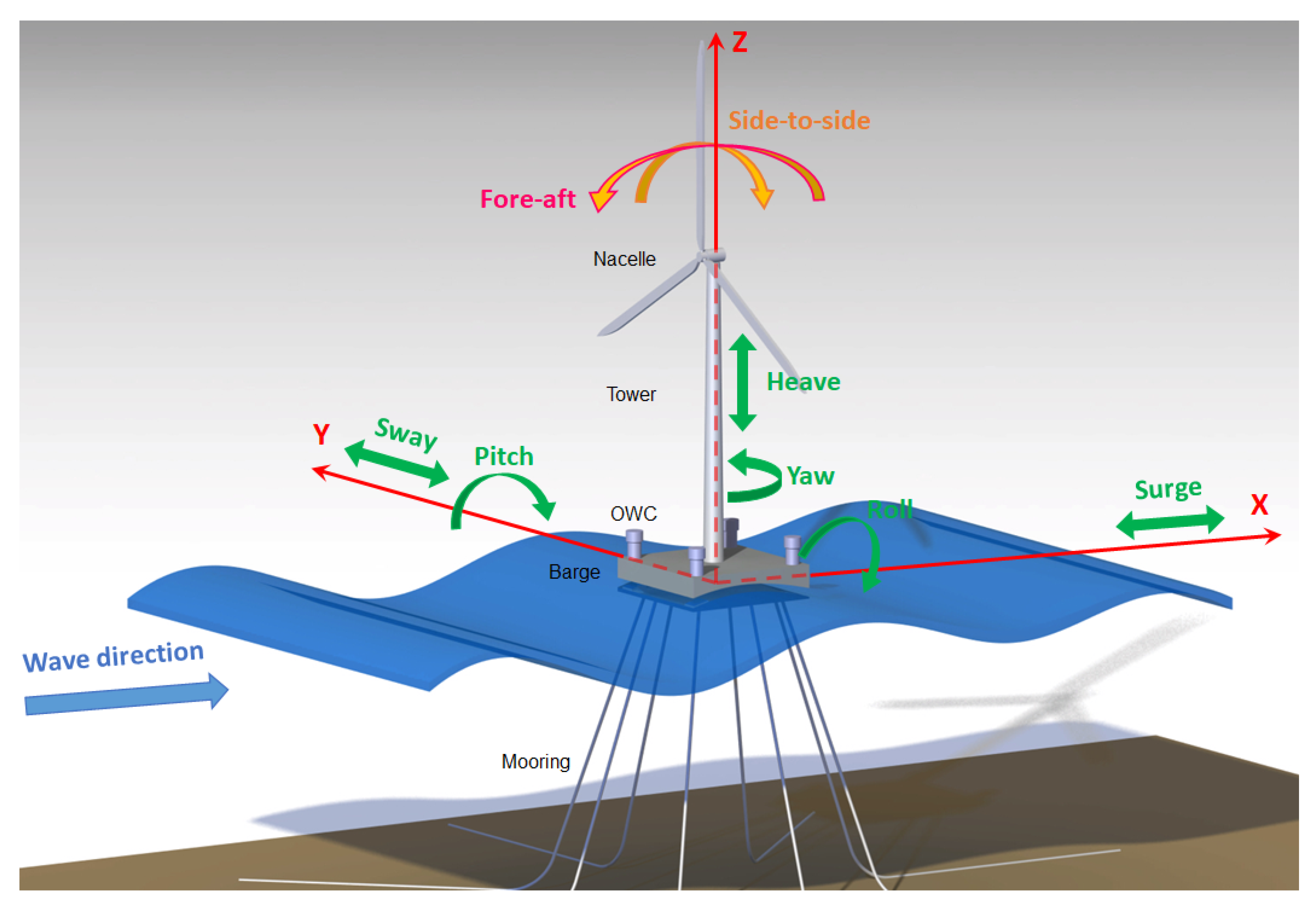
2.2. Equations of Motions in the FOWT
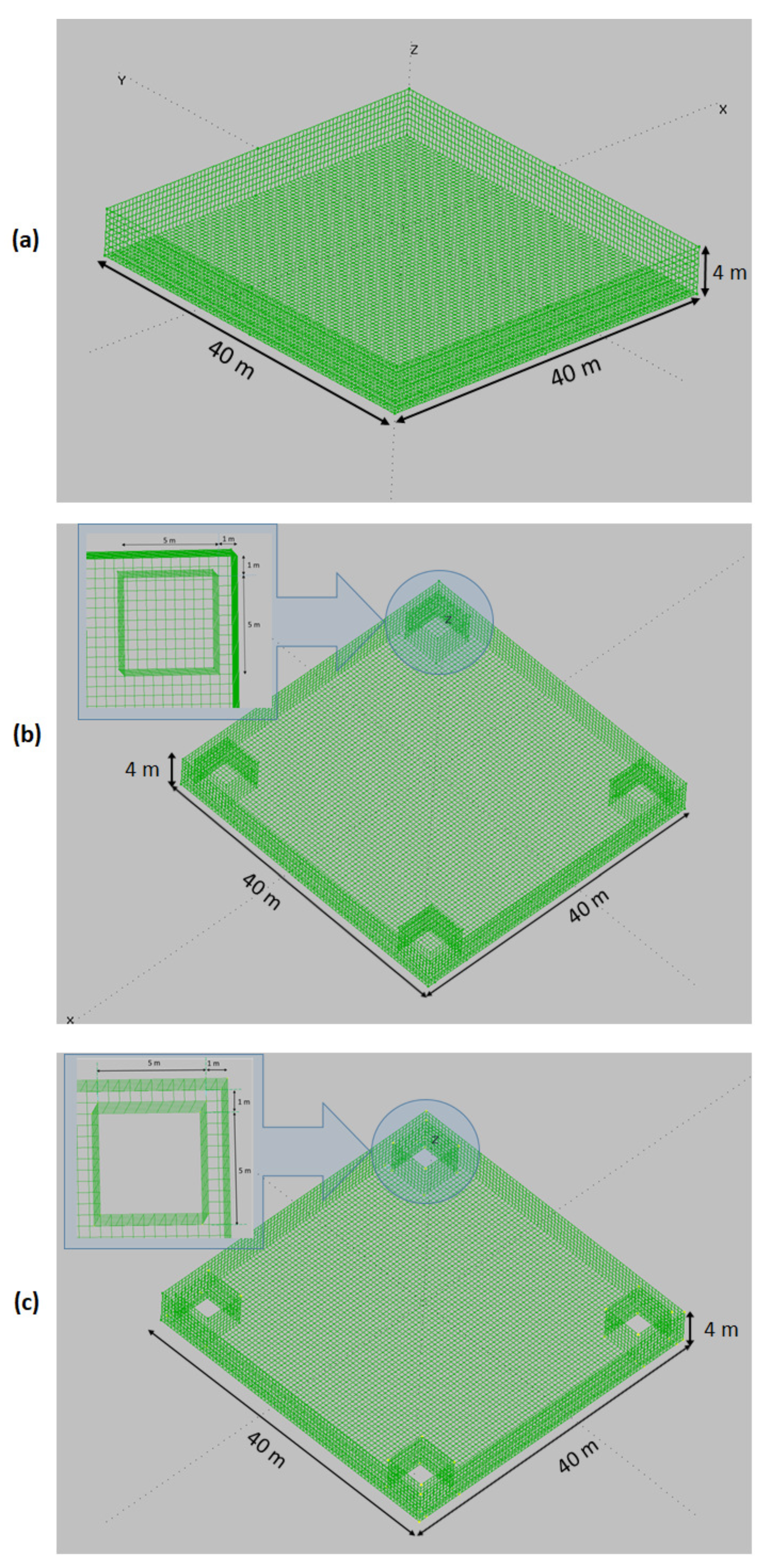
2.3. Platforms’ Design and Advanced Computations
3. Problem Statement
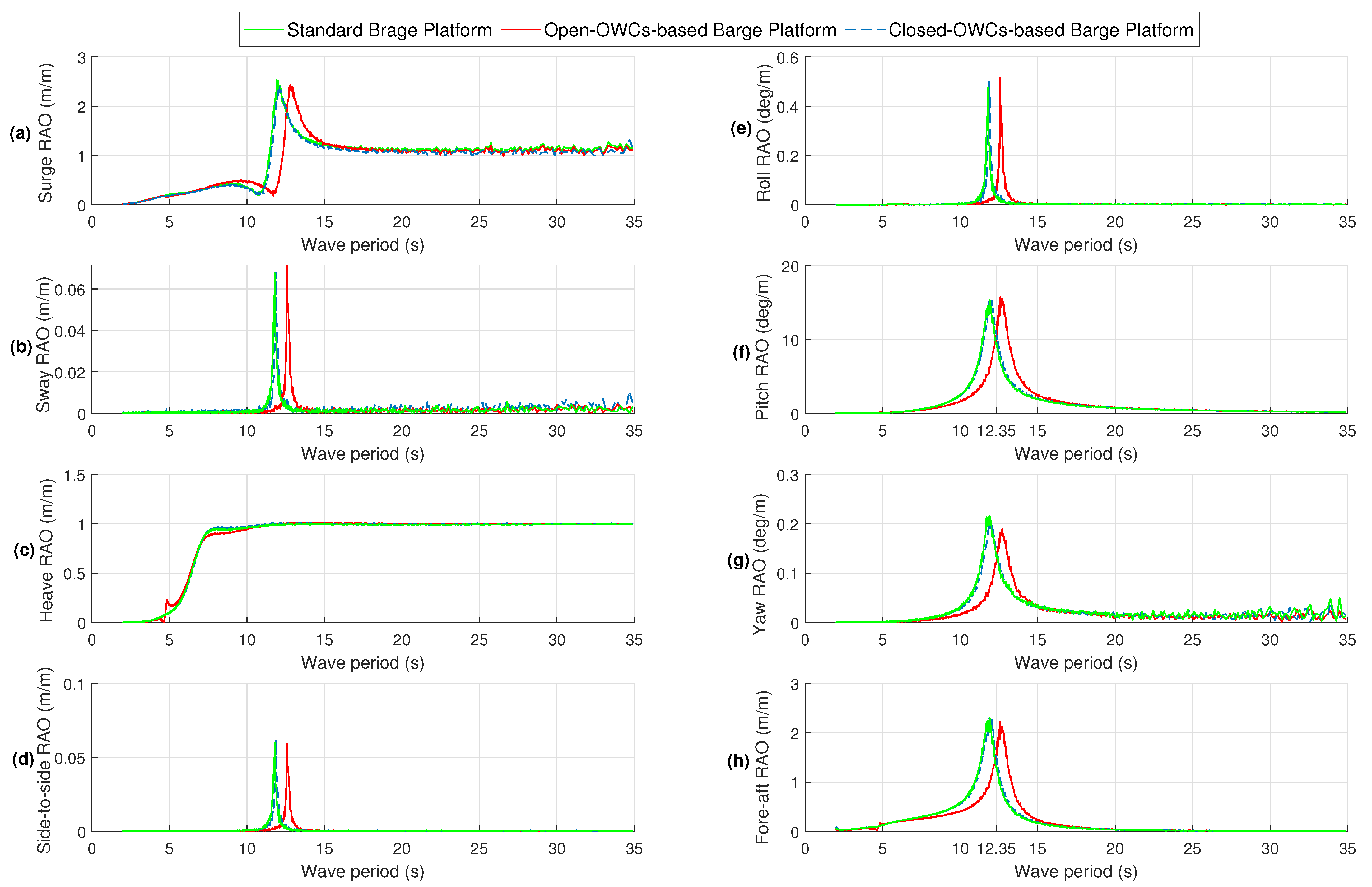
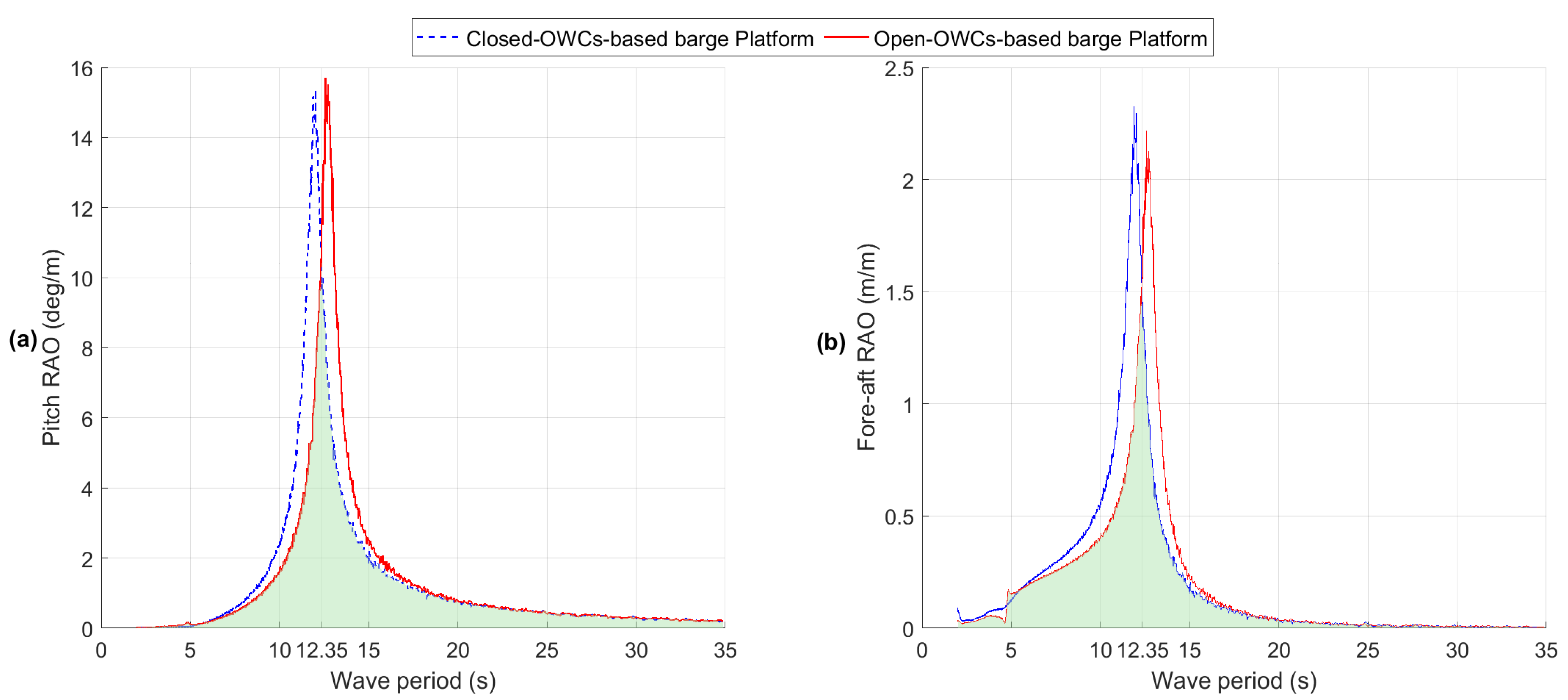
3.1. Barge-Based FOWTs’ Motions Analysis by Response Amplitude Operators
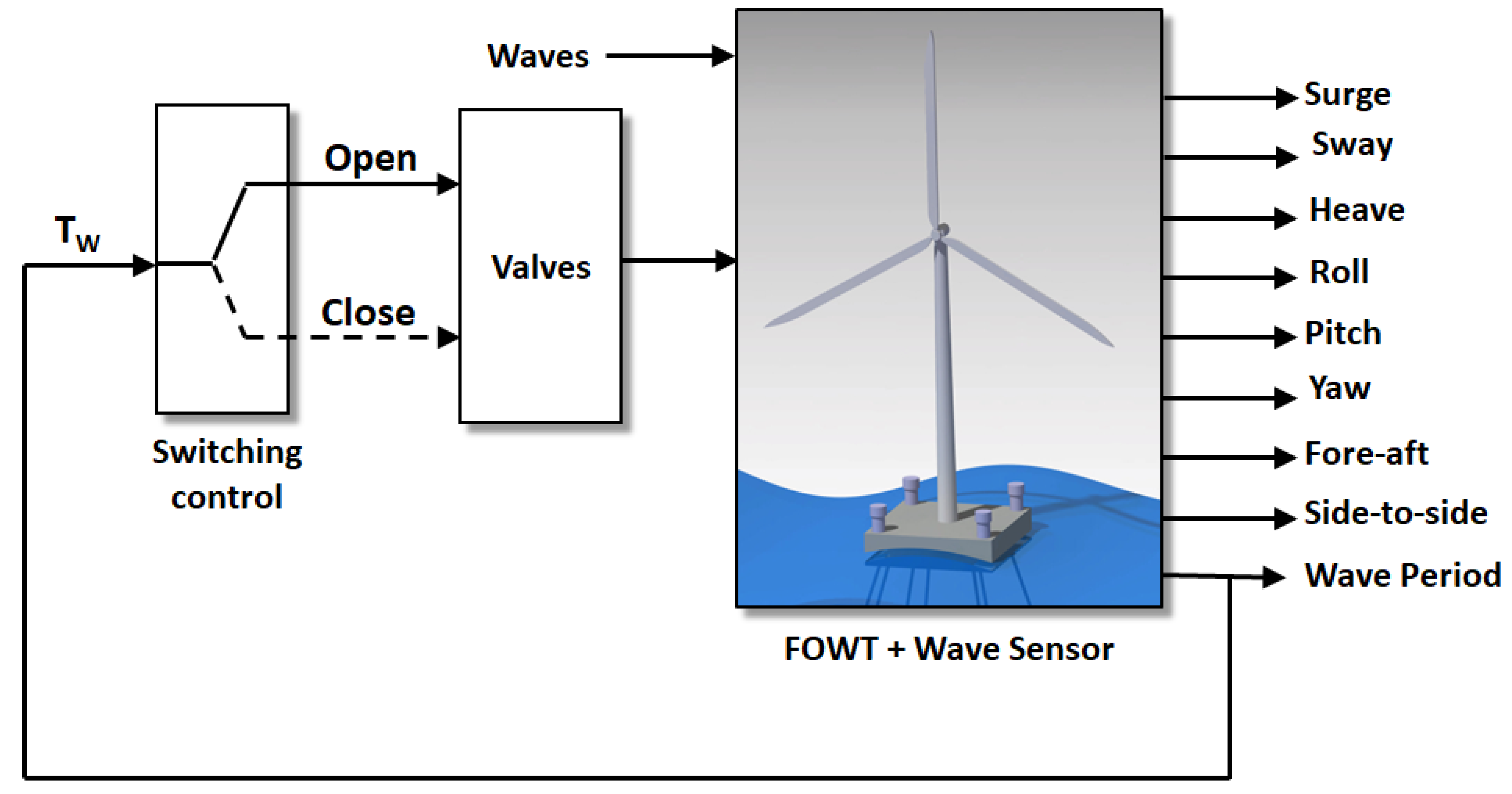
3.2. Control Statement
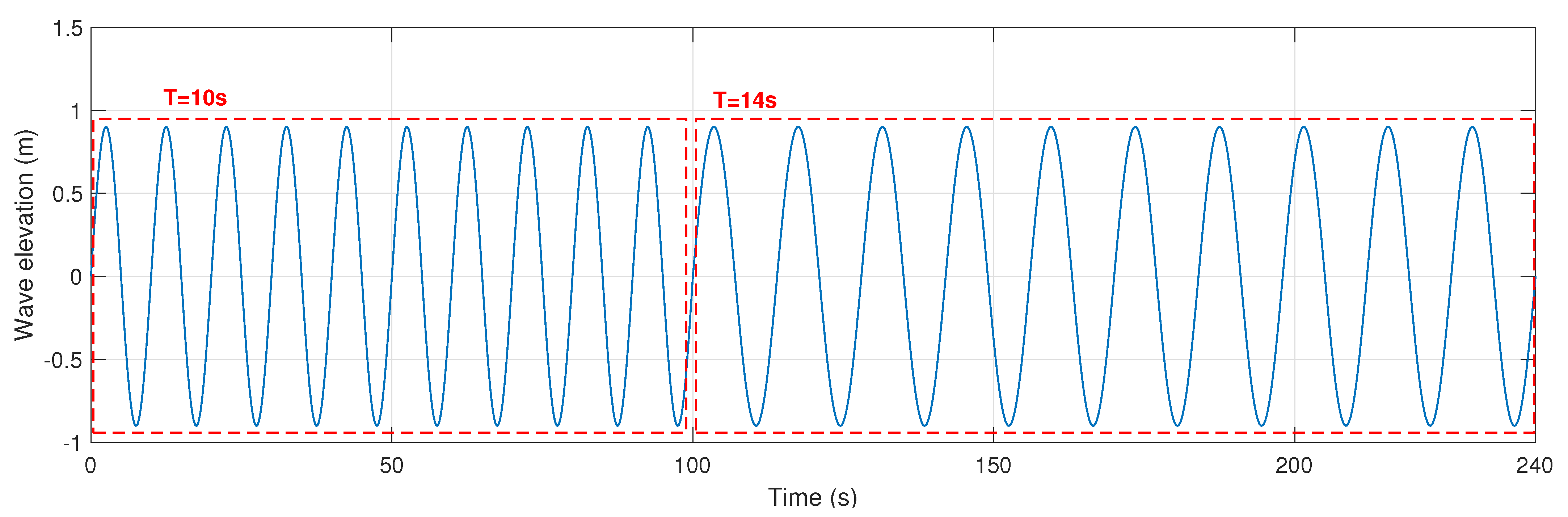
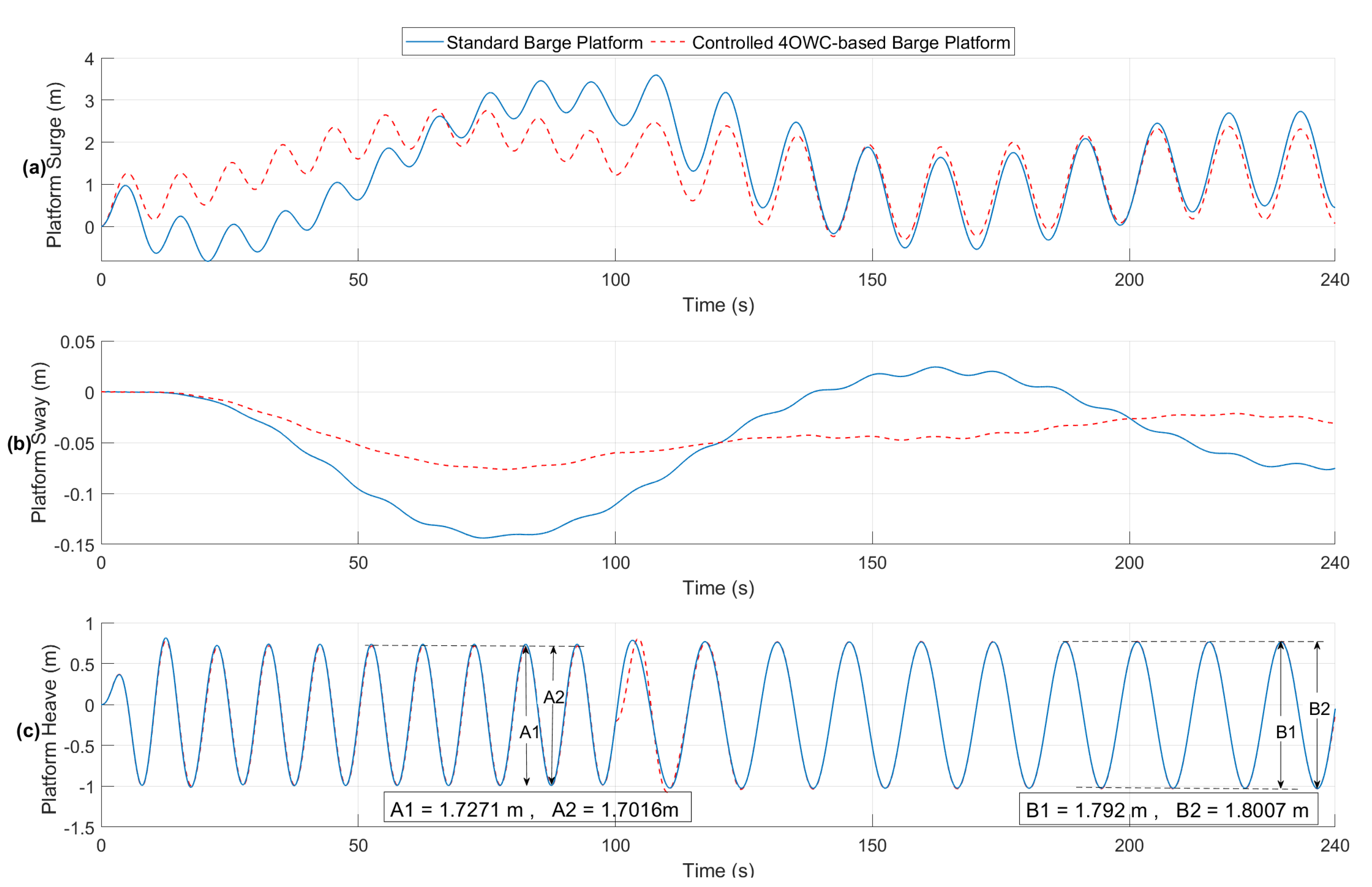
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DOF | Degree Of Freedom |
| FAST | Fatigue, Aerodynamics, Structures and Turbulence |
| FFT | Fast Fourier Transfer |
| FOWT | Floating Offshore Wind Turbine |
| RAO | Response Amplitude Operator |
| FRAO | Fore-aft Response Amplitude Operator |
| PRAO | Pitch Response Amplitude Operator |
| OWC | Oscillating Water Column |
| PTO | Power Take Off |
| SWL | Still Water Level |
| TMD | Tuned Mass Damper |
| WEC | Wave Energy Converter |
References
- Sher, F.; Curnick, O.; Azizan, M.T. Sustainable Conversion of Renewable Energy Sources. Sustainability 2021, 13, 2940. [Google Scholar] [CrossRef]
- Elusakin, T.; Shafiee, M.; Adedipe, T.; Dinmohammadi, F. A Stochastic Petri Net Model for O&M Planning of Floating Offshore Wind Turbines. Energies 2021, 14, 1134. [Google Scholar]
- Suzuki, H.; Sakai, Y.; Yoshimura, Y.; Houtani, H.; Carmo, L.H.; Yoshimoto, H.; Kamizawa, K.; Gonçalves, R.T. Non-Linear Motion Characteristics of a Shallow Draft Cylindrical Barge Type Floater for a FOWT in Waves. J. Mar. Sci. Eng. 2021, 9, 56. [Google Scholar] [CrossRef]
- Cottura, L.; Caradonna, R.; Ghigo, A.; Novo, R.; Bracco, G.; Mattiazzo, G. Dynamic modeling of an offshore floating wind turbine for application in the Mediterranean Sea. Appl. Sci. 2021, 14, 248. [Google Scholar]
- Benazzouz, A.; Mabchour, H.; El Had, K.; Zourarah, B.; Mordane, S. Offshore Wind Energy Resource in the Kingdom of Morocco: Assessment of the Seasonal Potential Variability Based on Satellite Data. J. Mar. Sci. Eng. 2021, 9, 31. [Google Scholar] [CrossRef]
- Karimirad, M.; Koushan, K. WindWEC: Combining wind and wave energy inspired by hywind and wavestar. In Proceedings of the 2016 IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 96–101. [Google Scholar]
- Maria-Arenas, A.; Garrido, A.J.; Rusu, E.; Garrido, I. Control strategies applied to wave energy converters: State of the art. Energies 2019, 12, 3115. [Google Scholar] [CrossRef] [Green Version]
- Quevedo, E.; Delory, M.; Castro, A.; Llinas, O.; Hernandez, J. Modular multi-purpose offshore platforms, the TROPOS project approach. In Proceedings of the Fourth International Conference on Ocean Energy (ICOE), Dublin, Ireland, 17–19 October 2012; pp. 1–5. [Google Scholar]
- Sharay, A.; Iglesias, G. The economics of wave energy: A review. Renew. Sustain. Energy Rev. 2015, 45, 397–408. [Google Scholar]
- Lackner, M.A. An investigation of variable power collective pitch control for load mitigation of floating offshore wind turbines. Wind Energy 2013, 16, 435–444. [Google Scholar] [CrossRef]
- Matha, D. Model Development and Loads Analysis of an Offshore Wind Turbine on a Tension Leg Platform with a Comparison to Other Floating Turbine Concepts (No. NREL/SR-500-45891); National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Haji, M.N.; Kluger, J.M.; Sapsis, T.P.; Slocum, A.H. A symbiotic approach to the design of offshore wind turbines with other energy harvesting systems. Ocean Eng. 2018, 169, 673–681. [Google Scholar] [CrossRef]
- Slocum, A.; Kluger, J.; Mannai, S. Energy Harvesting and Storage System Stabilized Offshore Wind Turbines. In Proceedings of the 2019 Offshore Energy and Storage Summit (OSES), Brest, France, 10–12 July 2019; pp. 1–6. [Google Scholar]
- Yang, W.; Tian, W.; Hvalbye, O.; Peng, Z.; Wei, K.; Tian, X. Experimental research for stabilizing offshore floating wind turbines. Energies 2019, 12, 1947. [Google Scholar] [CrossRef] [Green Version]
- Kamarlouei, M.; Gaspar, J.F.; Calvario, M.; Hallak, T.S.; Mendes, M.J.; Thiebaut, F.; Soares, C.G. Experimental analysis of wave energy converters concentrically attached on a floating offshore platform. Renew. Energy 2020, 152, 1171–1185. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zhao, X.; Wei, X. Robust structural control of an underactuated floating wind turbine. Wind Energy 2020, 23, 2166–2185. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, J.; Chen, M.Z.; Li, Z.; Sun, Y. Load mitigation for a barge-type floating offshore wind turbine via inerter-based passive structural control. Eng. Struct. 2018, 177, 198–209. [Google Scholar] [CrossRef]
- Wei, X.; Zhao, X. Vibration suppression of a floating hydrostatic wind turbine model using bidirectional tuned liquid column mass damper. Wind Energy 2020, 23, 1887–1904. [Google Scholar] [CrossRef]
- Sarmiento, J.; Iturrioz, A.; Ayllón, V.; Guanche, R.; Losada, I.J. Experimental modelling of a multi-use floating platform for wave and wind energy harvesting. Ocean Eng. 2019, 173, 761–773. [Google Scholar] [CrossRef]
- Cooper, M.; Heidlauf, P.; Sands, T. Controlling Chaos—Forced van der Pol Equation. Mathematics 2017, 5, 70. [Google Scholar] [CrossRef] [Green Version]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine (No. NREL/TP-500-41958); National Renewable Energy Lab. (NREL): Golden, CO, USA, 2007. [Google Scholar]
- Aboutalebi, P.; M’zoughi, F.; Garrido, I.; Garrido, A.J. Performance Analysis on the Use of Oscillating Water Column in Barge-Based Floating Offshore Wind Turbines. Mathematics 2021, 9, 475. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development (No. NREL/TP-500-38060); National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Aboutalebi, P.; Garrido, A.J.; M’zoughi, F.; Garrido, I. Stabilization of a Floating Offshore Wind Turbine Using Oscillating Water Columns. In Proceedings of the 2nd Workshop on Wind and Marine Energy (WWME), Online, 17 December 2020. [Google Scholar]
- Amundarain, M.; Alberdi, M.; Garrido, A.J.; Garrido, I. Neural rotational speed control for wave energy converters. Int. J. Control 2011, 84, 293–309. [Google Scholar] [CrossRef]
- M’zoughi, F.; Garrido, I.; Bouallègue, S.; Ayadi, M.; Garrido, A.J. Intelligent Airflow Controls for a Stalling-Free Operation of an Oscillating Water Column-Based Wave Power Generation Plant. Electronics 2019, 8, 70. [Google Scholar] [CrossRef] [Green Version]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. Self-adaptive global-best harmony search algorithm-based airflow control of a wells-turbine-based oscillating-water column. Appl. Sci. 2020, 10, 4628. [Google Scholar] [CrossRef]
- Aubault, A.; Alves, M.; Sarmento, A.N.; Roddier, D.; Peiffer, A. Modeling of an oscillating water column on the floating foundation WindFloat. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 235–246. [Google Scholar]
- Perez-Collazo, C.; Greaves, D.; Iglesias, G. Hydrodynamic response of the WEC sub-system of a novel hybrid wind-wave energy converter. Energy Convers. Manag. 2018, 171, 307–325. [Google Scholar] [CrossRef]
- Ramachandran, G.K.V.; Robertson, A.; Jonkman, J.M.; Masciola, M.D. Investigation of Response Amplitude Operators for Floating Offshore Wind Turbines (No. NREL/CP-5000-58098); National Renewable Energy Lab. (NREL): Golden, CO, USA, 2013. [Google Scholar]
- Pintelon, R.; Schoukens, J. System Identification: A Frequency Domain Approach; John Wiley & Sons: Hoboken, NJ, USA, 2012; pp. 54–64. [Google Scholar]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; La Sen, D.; De La, M. ANN-Based Airflow Control for an Oscillating Water Column Using Surface Elevation Measurements. Sensors 2020, 20, 1352. [Google Scholar] [CrossRef] [PubMed] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Hub height | 90 m |
| Center of mass location | 38.23 m |
| Rotor diameter | 126 m |
| Number of blades | 3 |
| Initial rotational speed | 12.1 rpm |
| Blades mass | 53.22 kg |
| Nacelle mass | 240,000 kg |
| Hub mass | 56,780 kg |
| Tower mass | 347,460 kg |
| Power output | 5 MW |
| Cut-in, Rated, Cut-out wind speed | 3 m/s, 11.4 m/s, 25 m/s |
| Parameter | Value |
|---|---|
| Platforms’ size (W × L × H) | 40 m × 40 m × 10 m |
| Each OWC’s size (W × L × H) | 5 m × 5 m × 10 m |
| Draft, Free board for both platforms | 4 m, 6 m |
| Water displacement for the simple barge | 6400 m |
| Water displacement for the barge with OWCs | 6000 m |
| Mass, Including Ballast | 5,452,000 kg |
| CM Location below SWL | 0.281768 m |
| Roll Inertia about CM | 726,900,000 kg·m |
| Pitch Inertia about CM | 726,900,000 kg·m |
| Yaw Inertia about CM | 1,453,900,000 kg·m |
| Anchor (Water) Depth | 150 m |
| Separation between Opposing Anchors | 773.8 m |
| Unstretched Line Length | 473.3 m |
| Neutral Line Length Resting on Seabed | 250 m |
| Line Diameter | 0.0809 m |
| Line Mass Density | 130.4 kg/m |
| Line Extensional Stiffness | 589,000,000 N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aboutalebi, P.; M’zoughi, F.; Martija, I.; Garrido, I.; Garrido, A.J. Switching Control Strategy for Oscillating Water Columns Based on Response Amplitude Operators for Floating Offshore Wind Turbines Stabilization. Appl. Sci. 2021, 11, 5249. https://0-doi-org.brum.beds.ac.uk/10.3390/app11115249
Aboutalebi P, M’zoughi F, Martija I, Garrido I, Garrido AJ. Switching Control Strategy for Oscillating Water Columns Based on Response Amplitude Operators for Floating Offshore Wind Turbines Stabilization. Applied Sciences. 2021; 11(11):5249. https://0-doi-org.brum.beds.ac.uk/10.3390/app11115249
Chicago/Turabian StyleAboutalebi, Payam, Fares M’zoughi, Itziar Martija, Izaskun Garrido, and Aitor J. Garrido. 2021. "Switching Control Strategy for Oscillating Water Columns Based on Response Amplitude Operators for Floating Offshore Wind Turbines Stabilization" Applied Sciences 11, no. 11: 5249. https://0-doi-org.brum.beds.ac.uk/10.3390/app11115249