Transient Attitude Motion of TNS-0#2 Nanosatellite during Atmosphere Re-Entry

 ,
,  , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
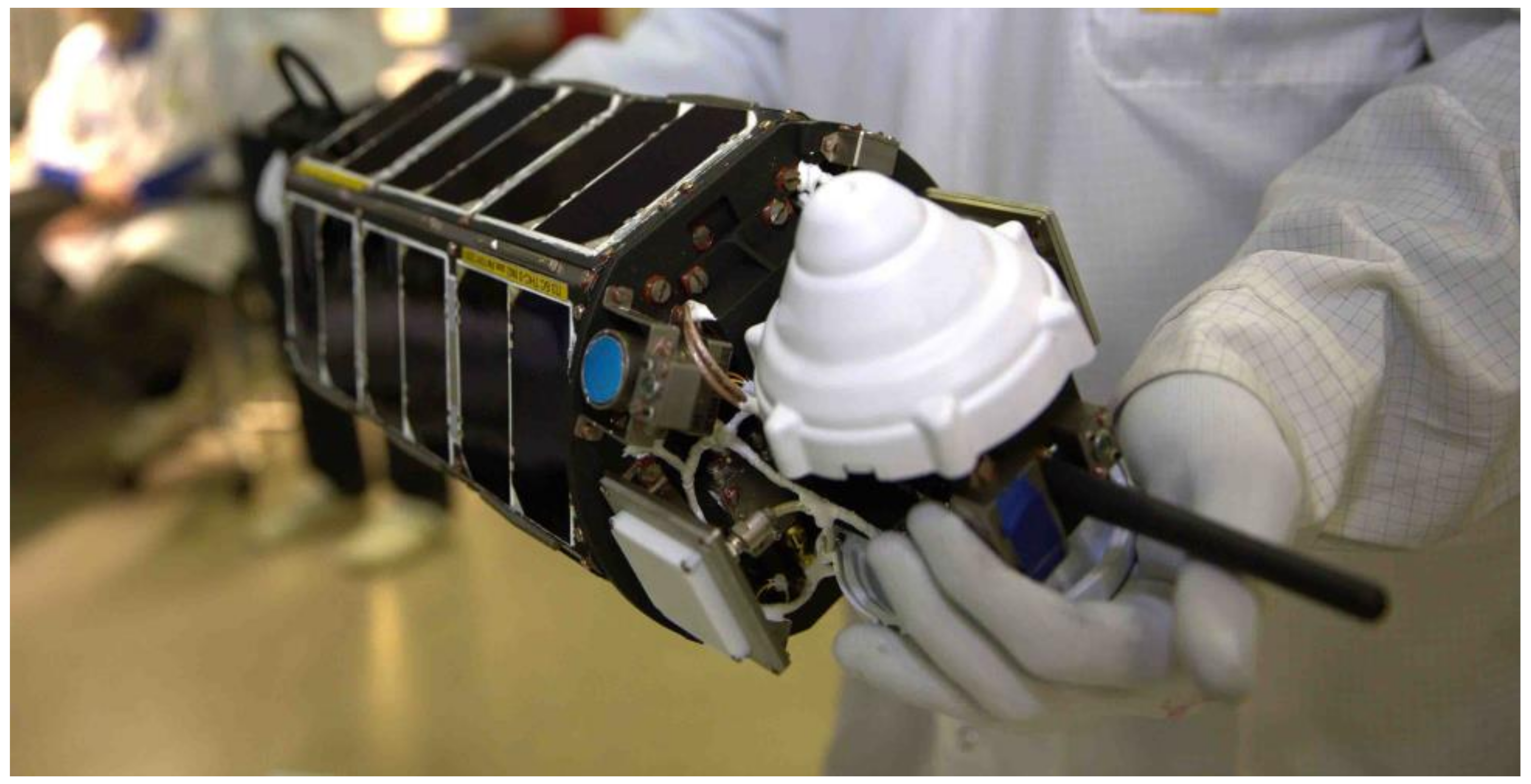
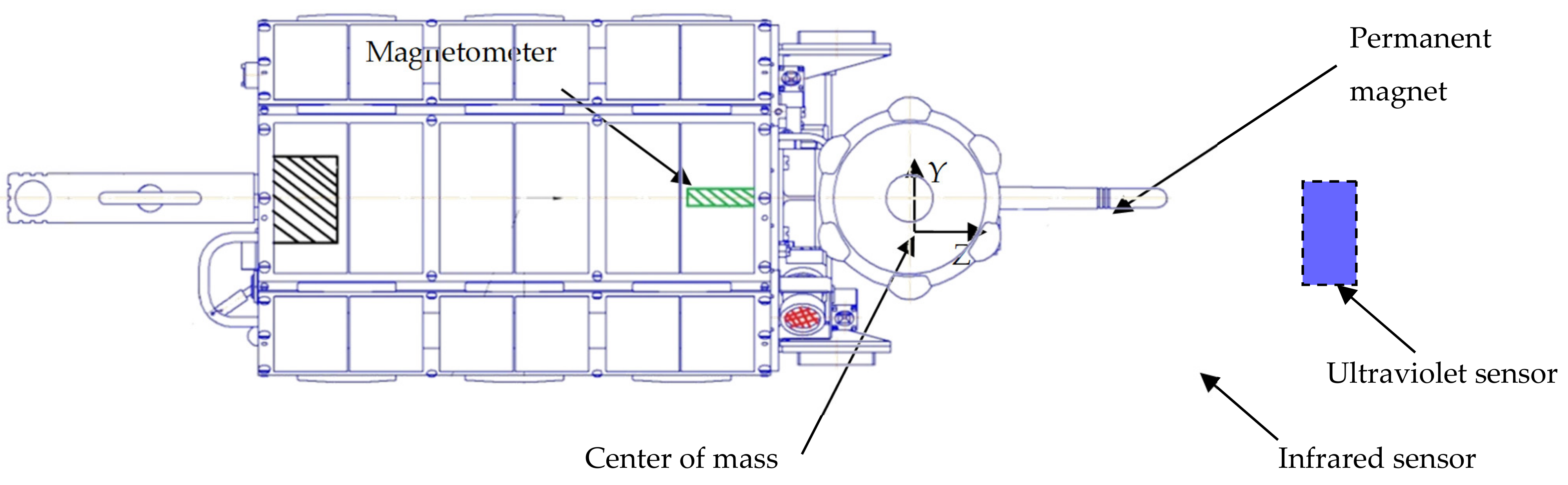
2. TNS-0 #2 Description
3. Attitude Motion Reconstruction Technique
3.1. TNS-0#2 Attitude Motion Equations
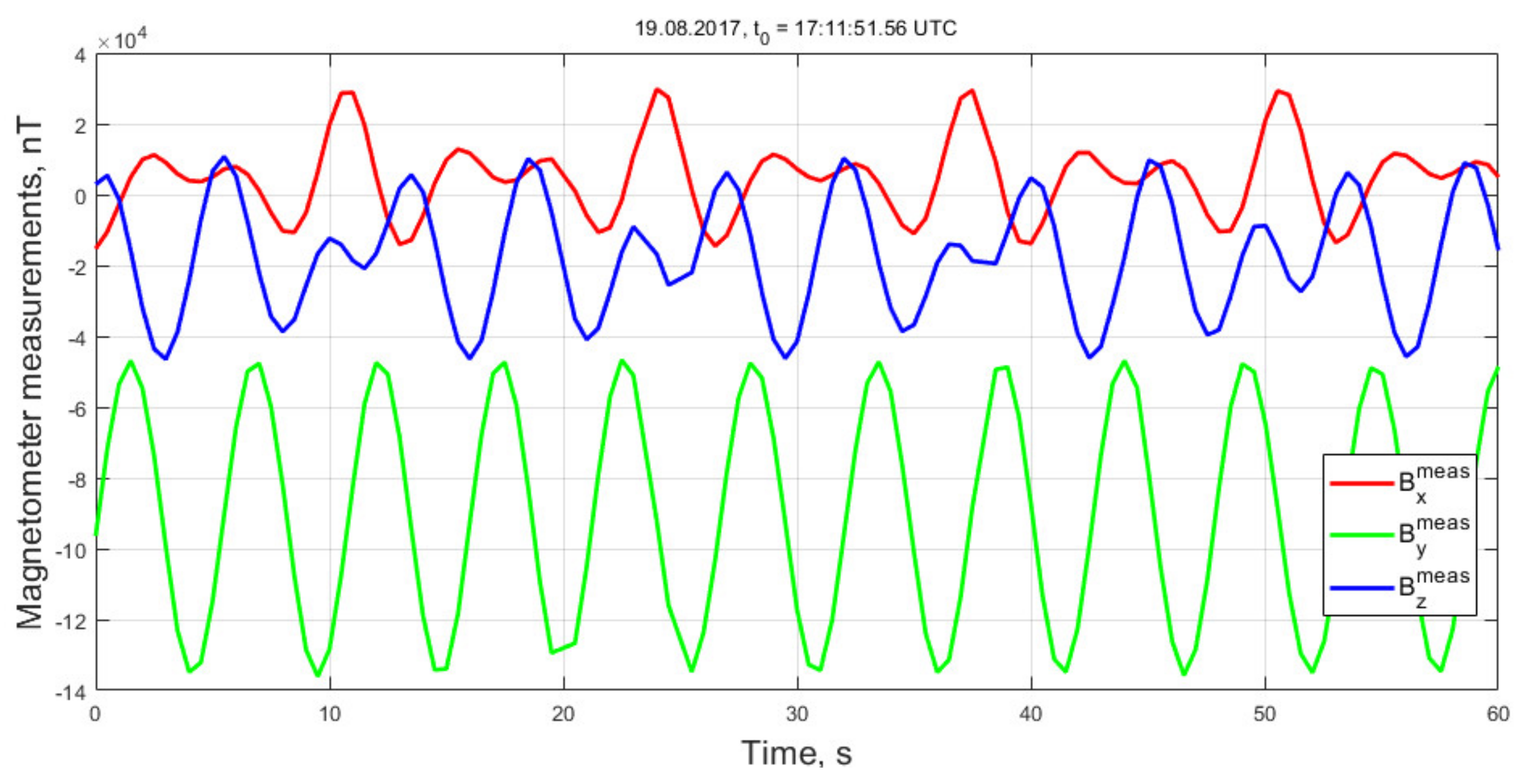
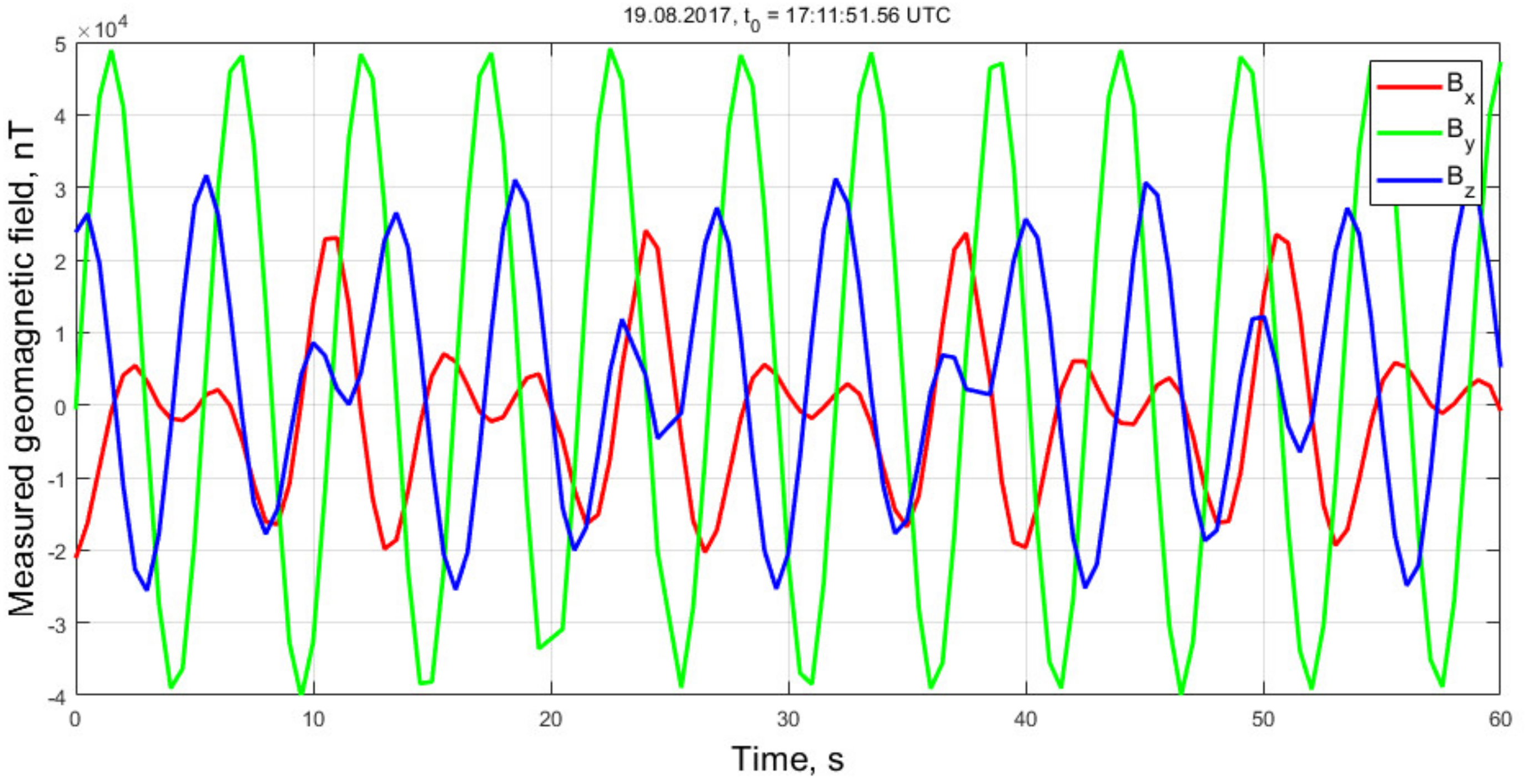
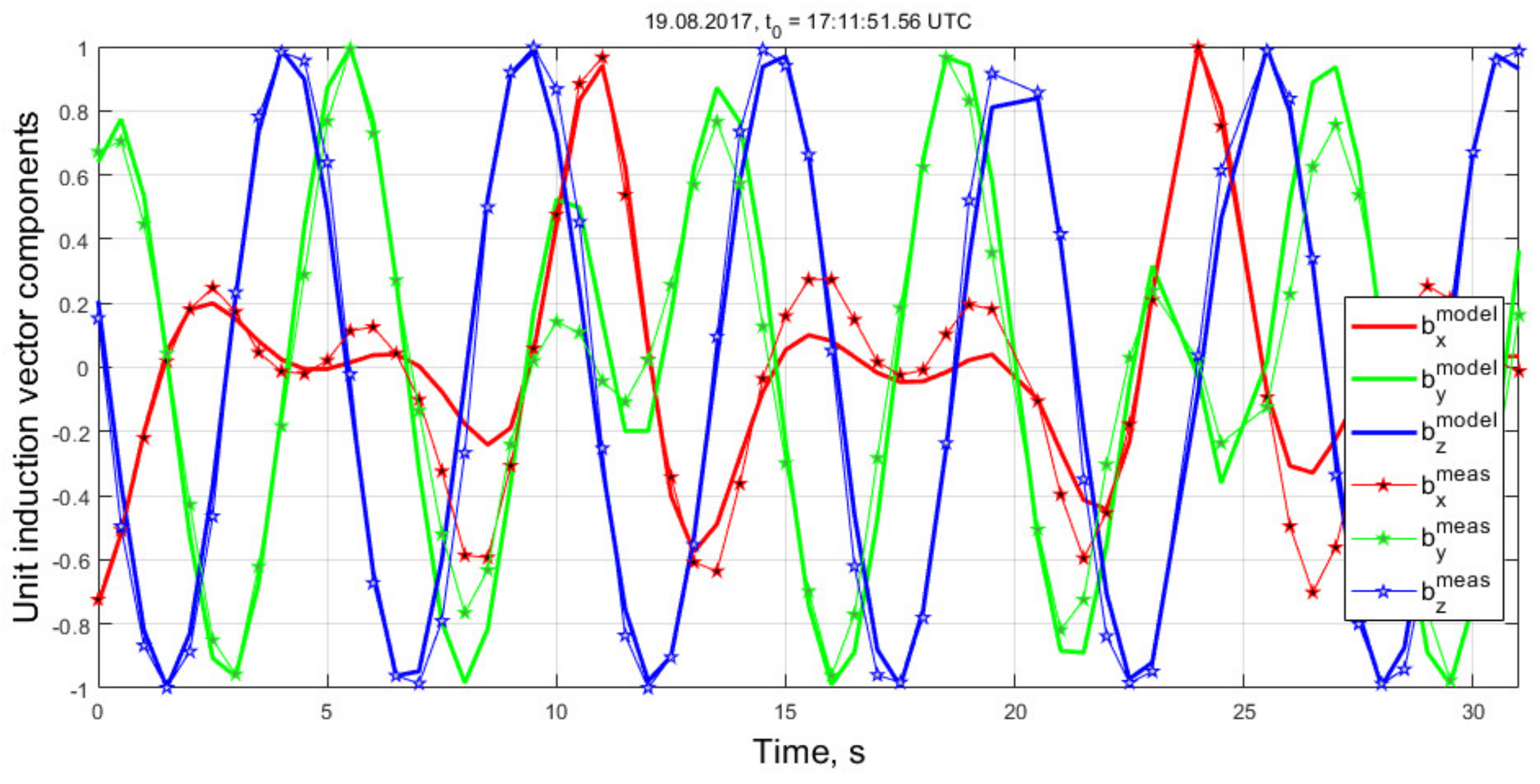
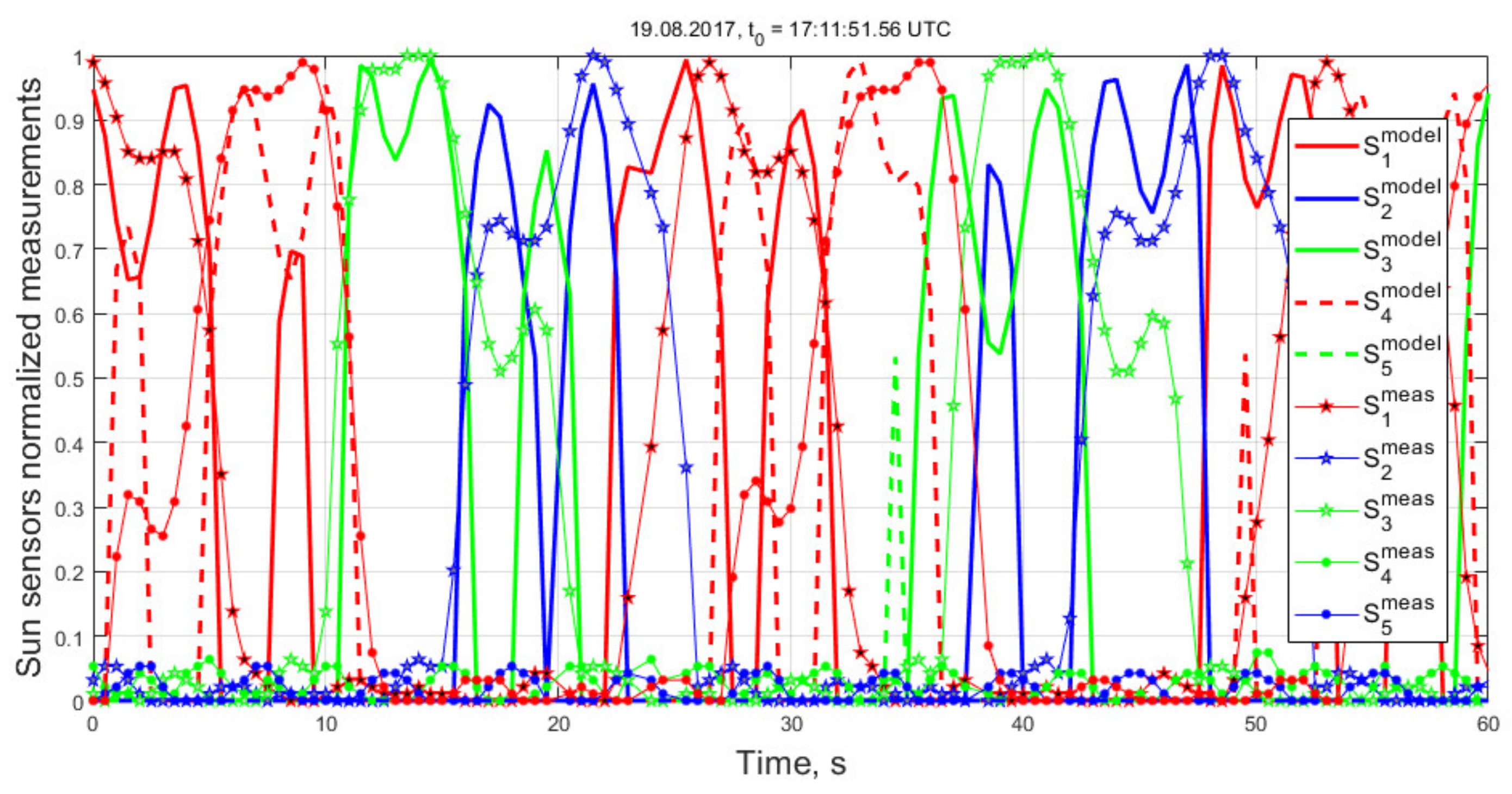
3.2. Measurements Processing Technique
4. Measurements Processing Results and Passive Attitude Motion Regimes Analysis
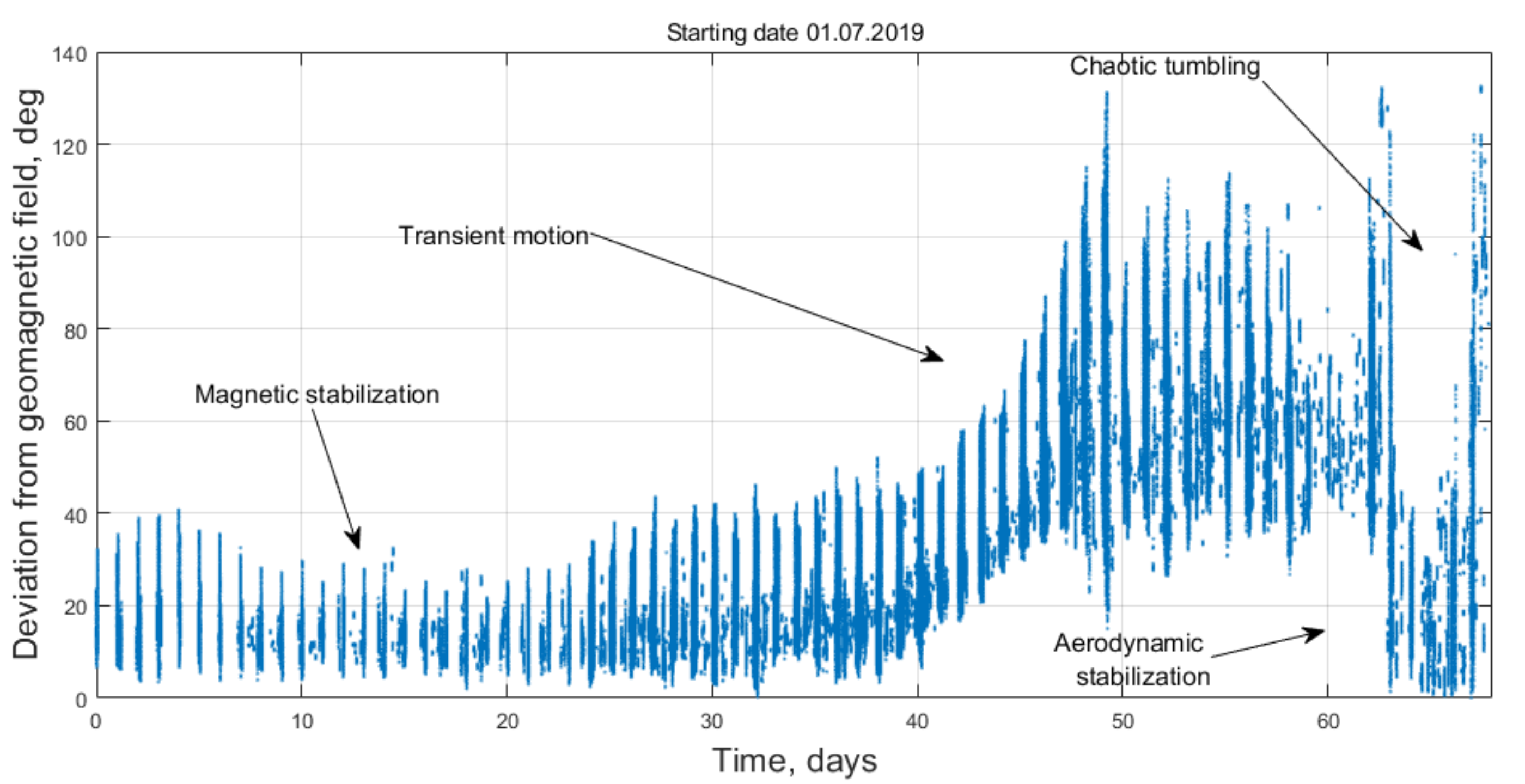
4.1. Attitude Stabilization After The Launch
4.2. Magnetic Stabilization of TNS-0 # 2 Nanosatellite
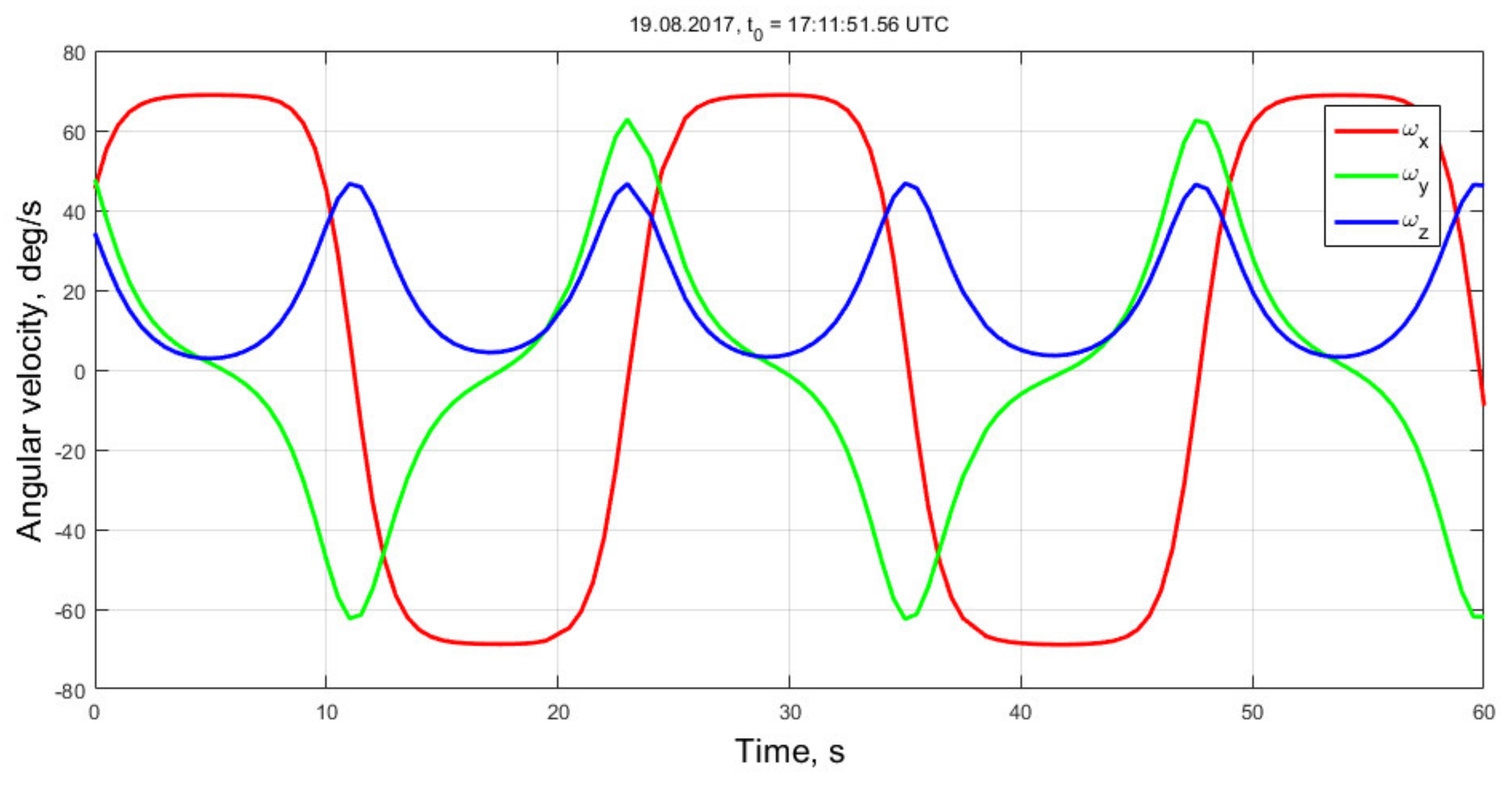
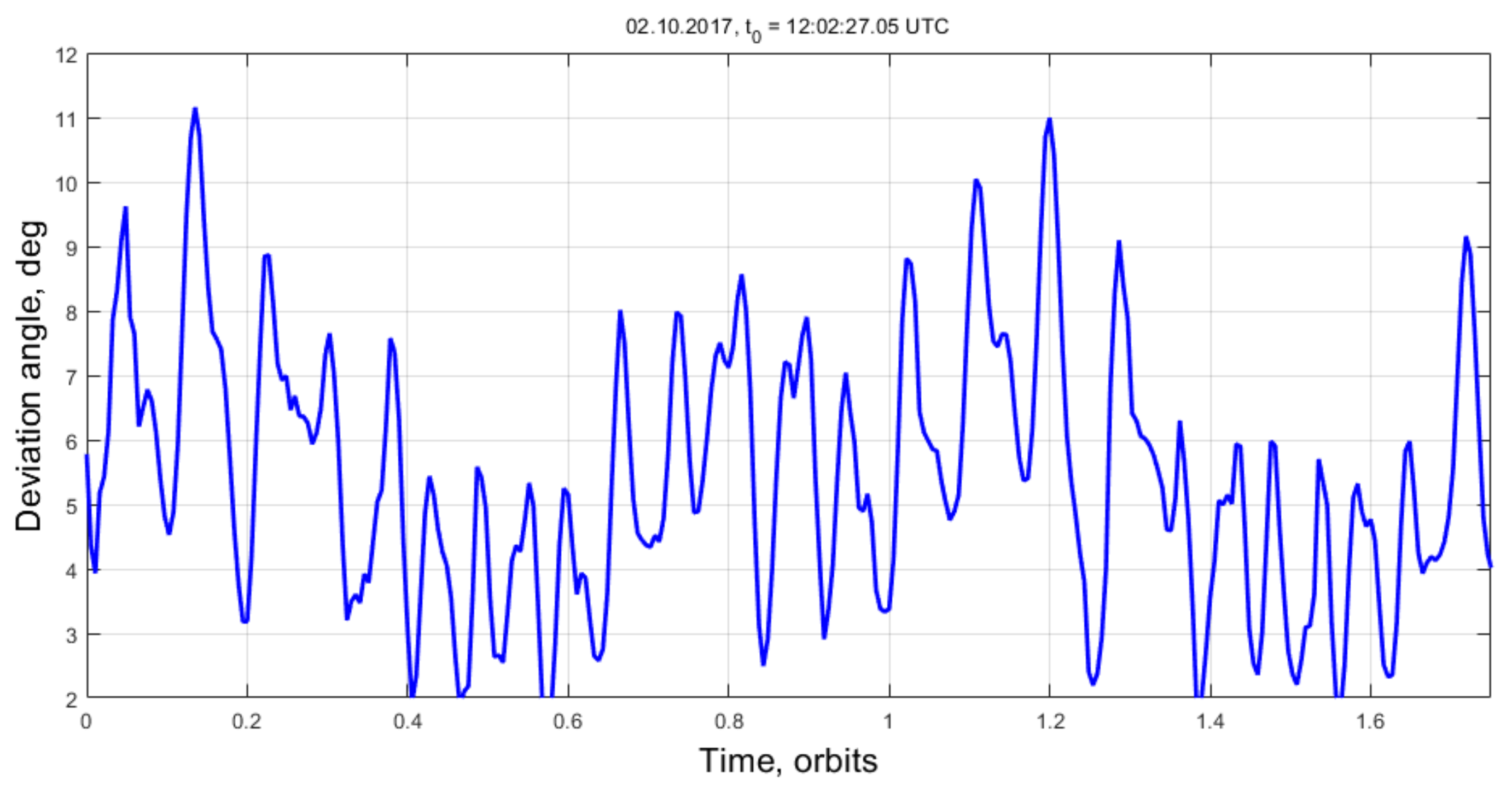
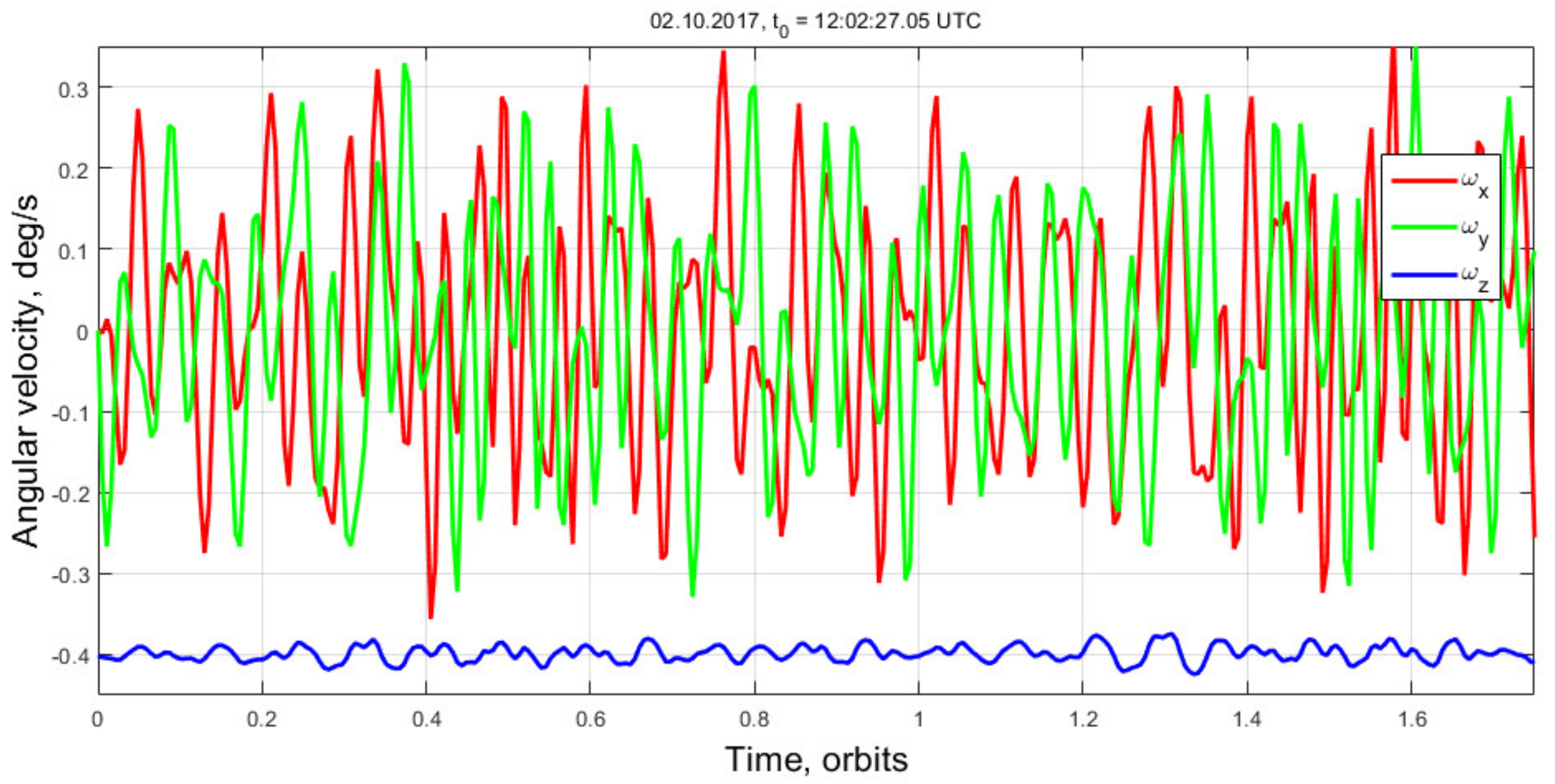
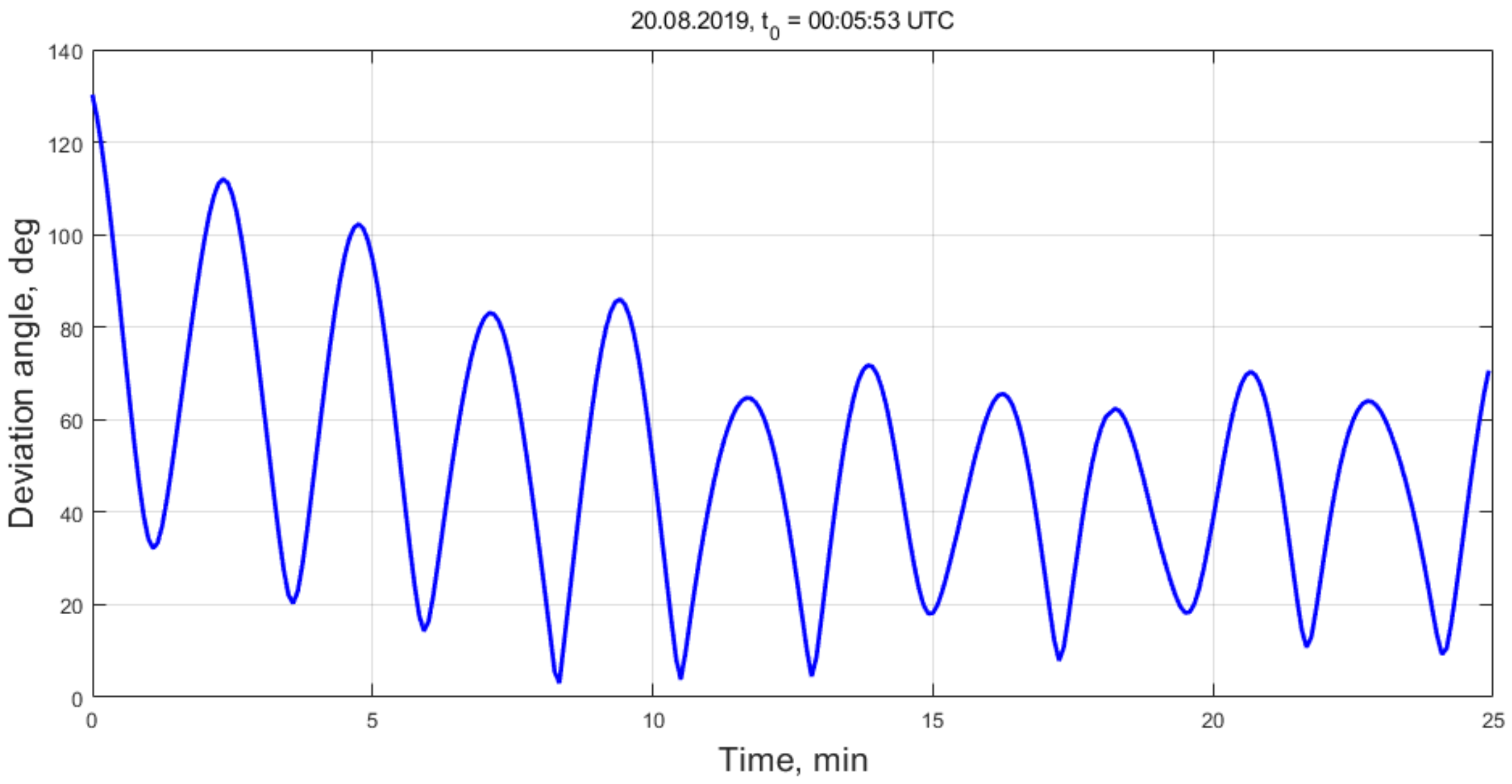
4.3. Transient Attitude Motion
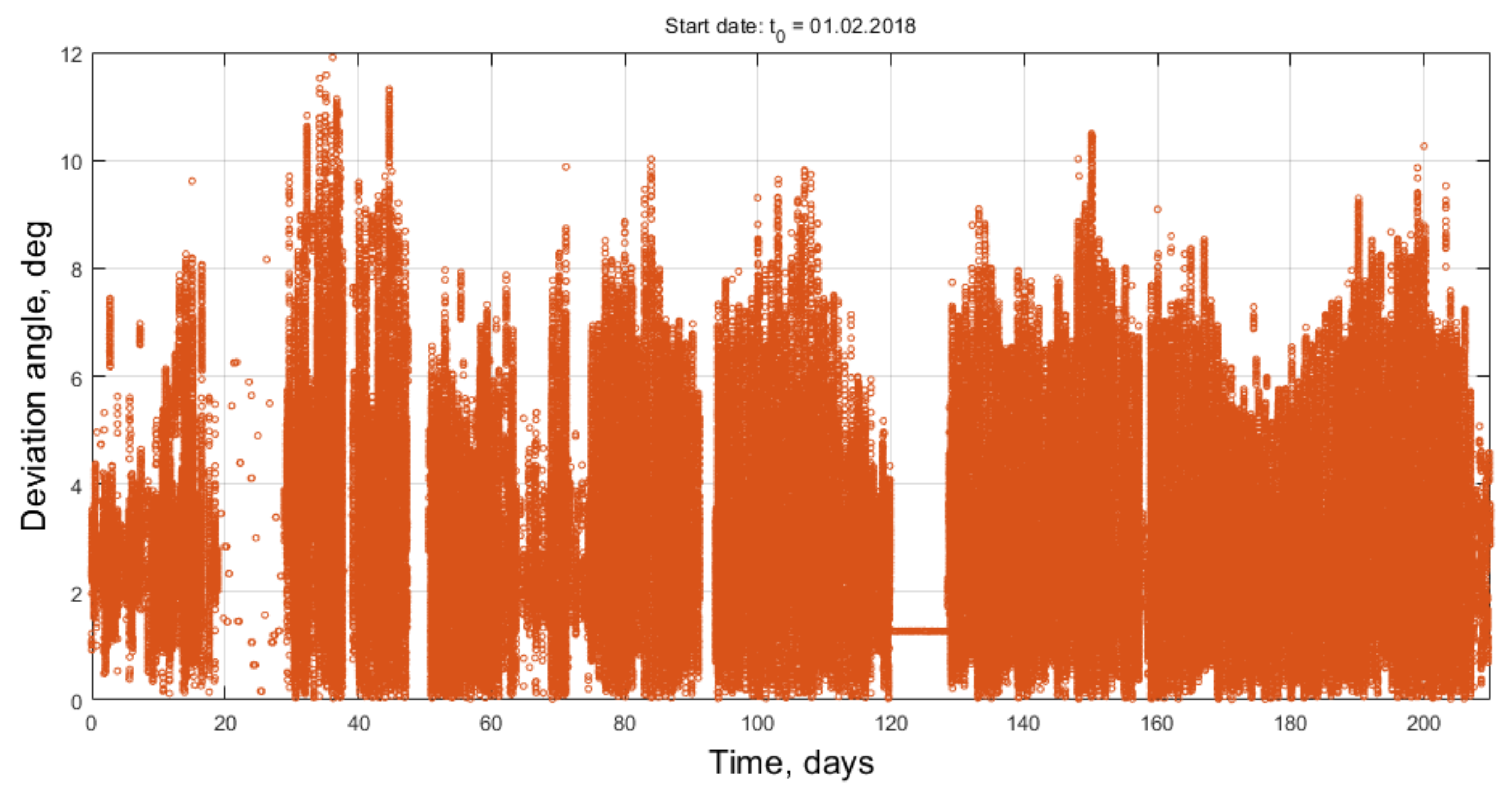
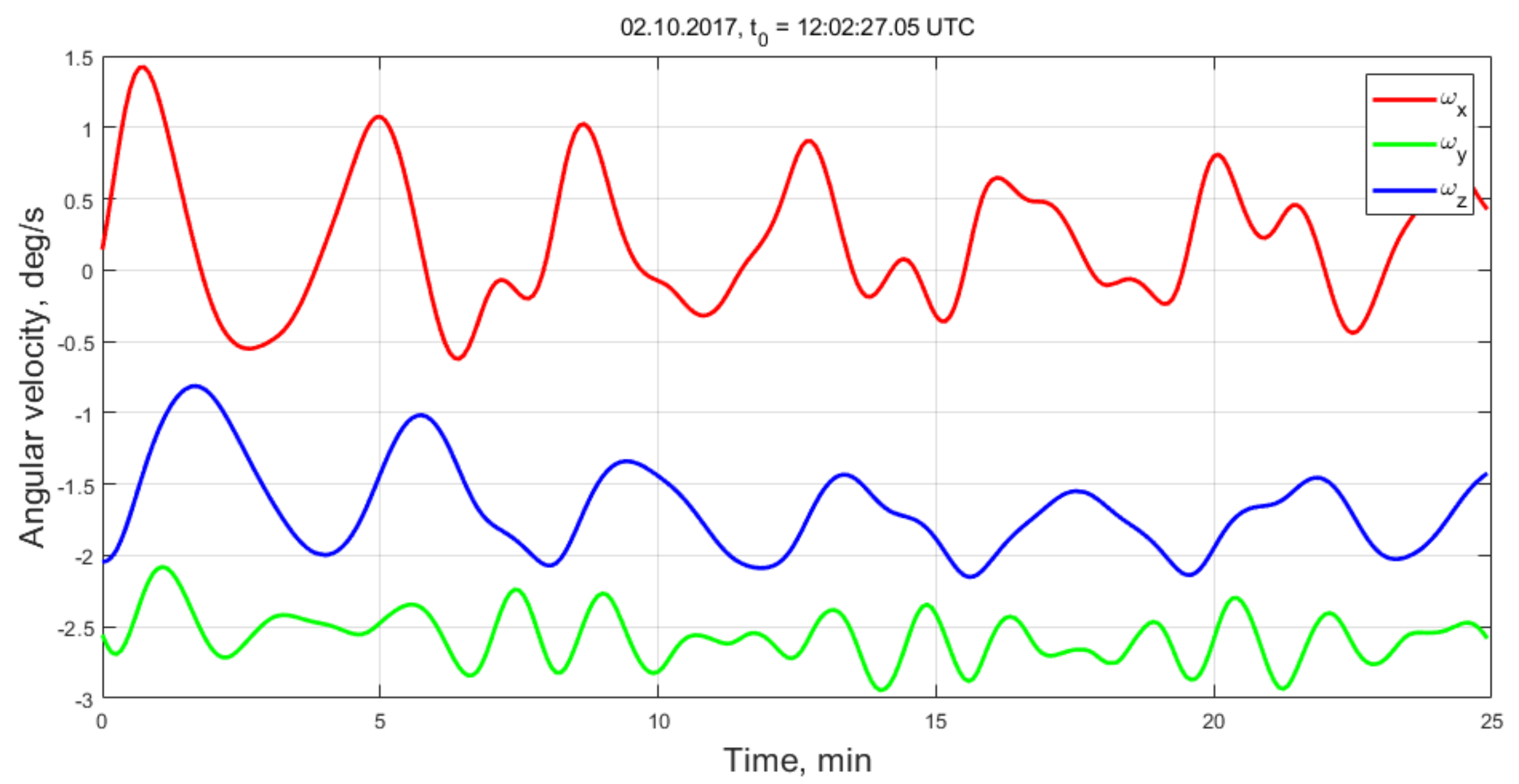
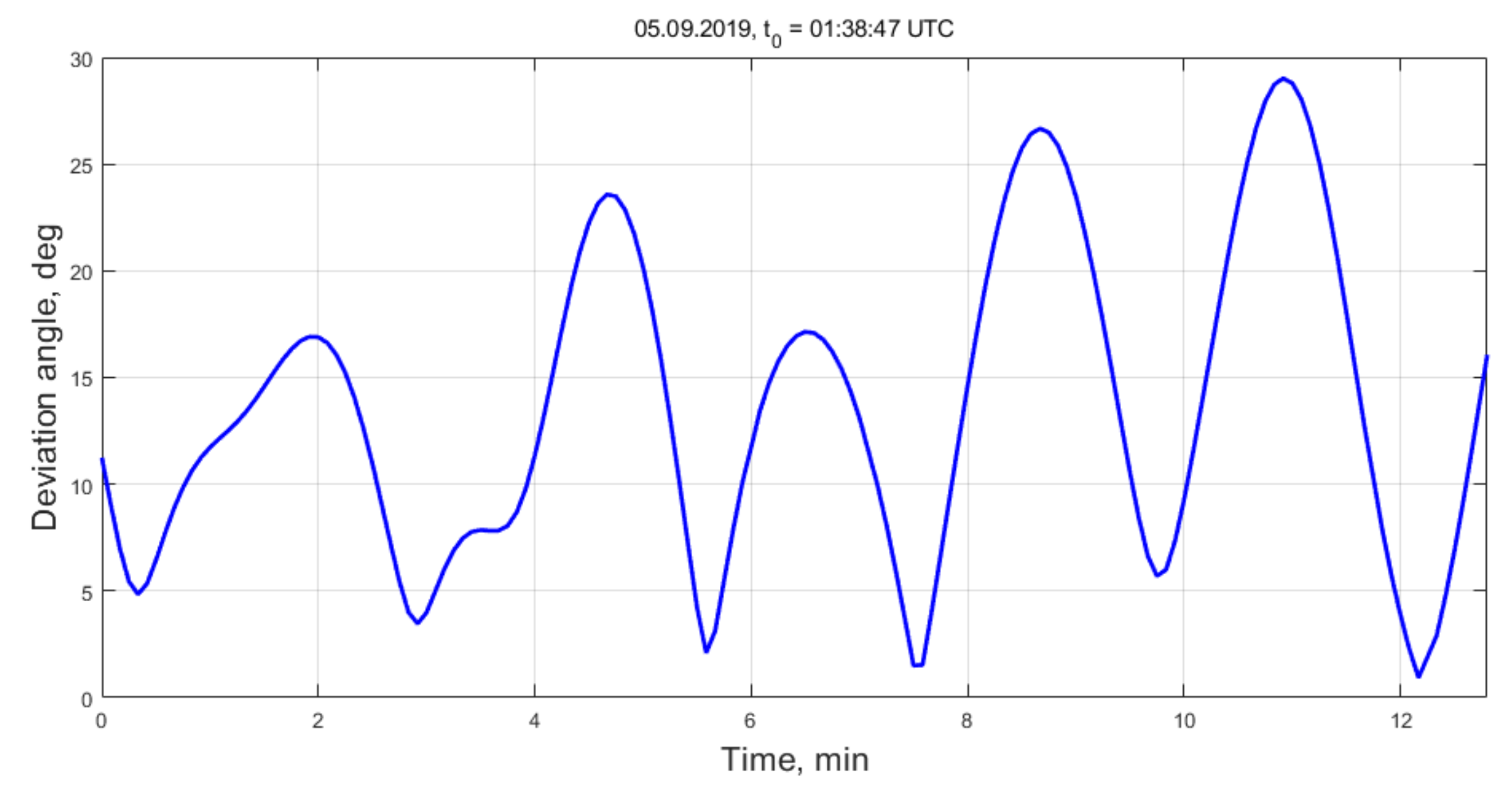
4.4. Aerodynamic Attitude Stabilization
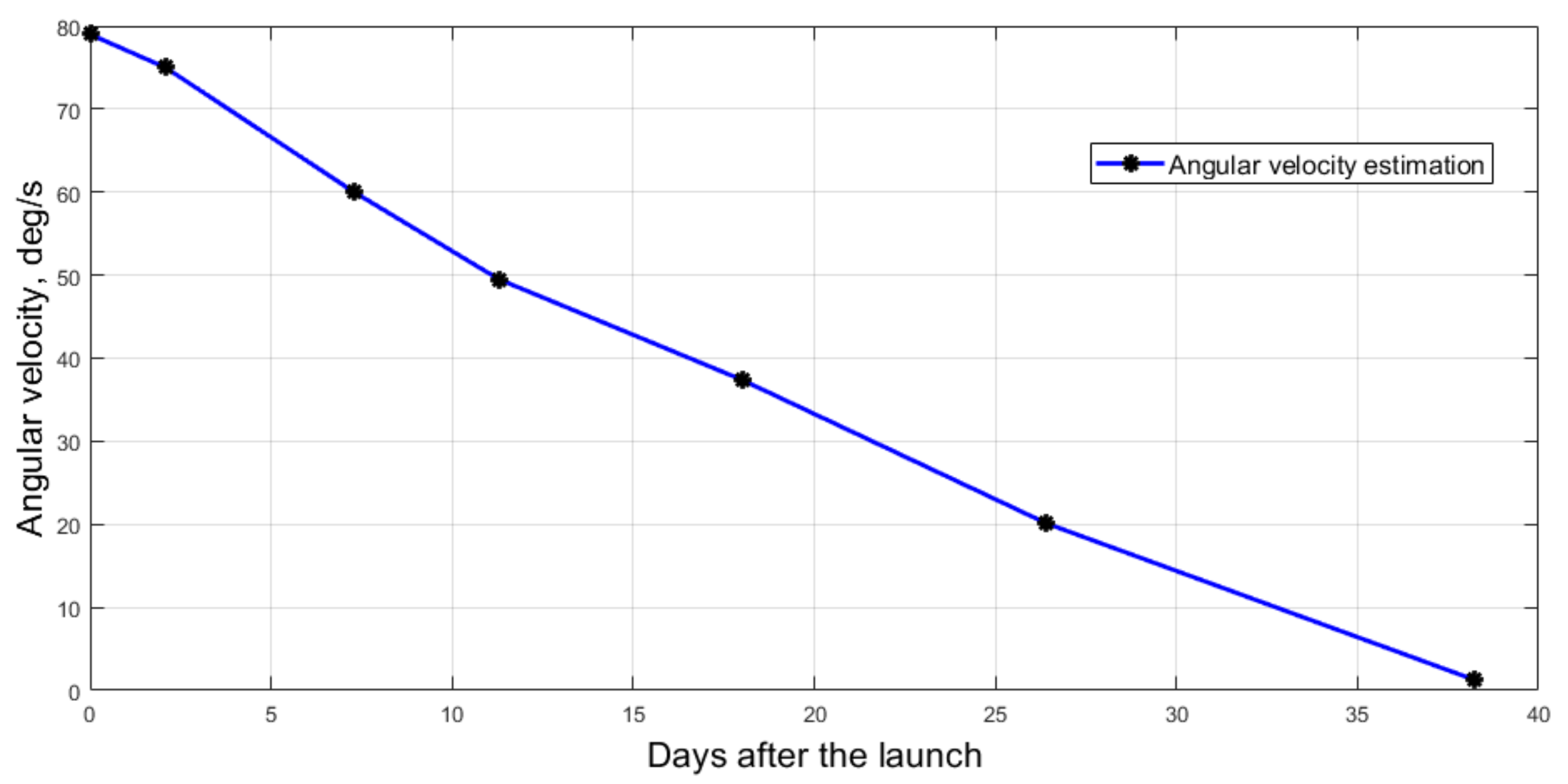
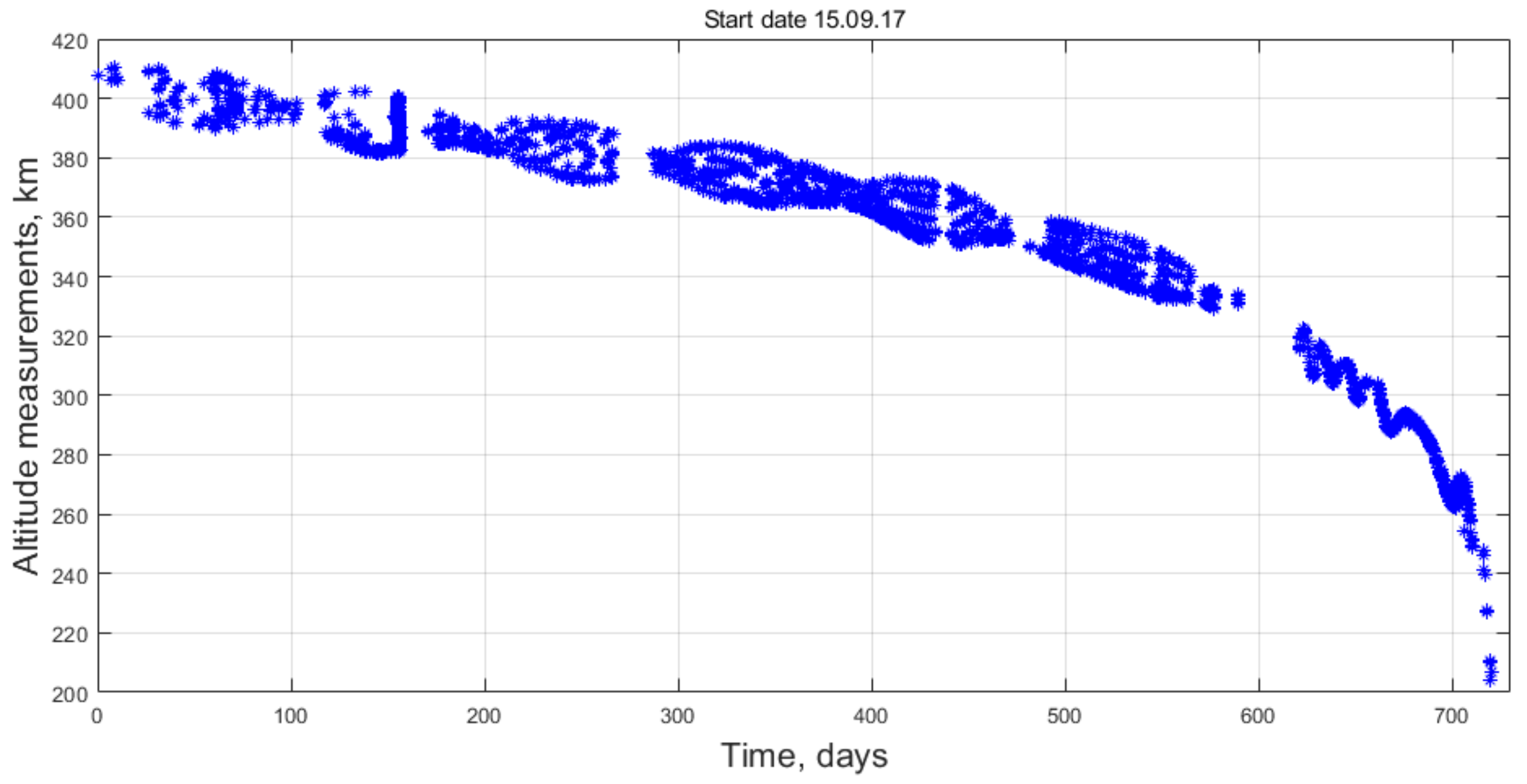
4.5. Tumbling During The Very Last Day
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ovchinnikov, M.Y.; Shargorodskiy, V.D.; Pen’kov, V.I.; Mirer, S.A.; Guerman, A.D.; Nemuchinskiy, R.B. Nanosatellite REFLECTOR: Choice of parameters of the attitude control system. Cosm. Res. 2007, 45, 60–77. [Google Scholar] [CrossRef]
- Sarychev, V.A.; Mirer, S.A.; Sazonov, V.V. Plane oscillations of a gravitational system satellite-stabilizer with maximal speed of response. Acta Astronaut. 1976, 3, 651–669. [Google Scholar] [CrossRef]
- Sarychev, V.A.; Gutnik, S.A. Gravity-oriented satellite dynamics subject to gravitational and active damping torques. Cosm. Res. 2018, 56, 68–74. [Google Scholar] [CrossRef]
- German, A.D.; Gutnik, S.A.; Sarychev, V.A. Satellite dynamics due to gravity and constant torques. J. Comput. Syst. Sci. Int. 2017, 56, 125–136. [Google Scholar] [CrossRef]
- Battagliere, M.L.; Santoni, F.; Ovchinnikov, M.; Graziani, F. Hysteresis Rods in The Passive Magnetic Stabilization System for University Micro and Nanosatellites. In Proceedings of the 59th IAC, Glasgow, UK, 29 September–3 October 2008; p. 10. [Google Scholar]
- Long, M.; Lorenz, A.; Rodgers, G.; Tapio, E.; Tran, G.; Jackson, K.; Twiggs, R.; Bleier, T. A Cubesat Derived Design for a Unique Academic Research Mission in Earthquake Signature Detection. In Proceedings of the 16th Annual/USU Conference on Small Satellites, Logan, TX, USA, 12–15 August 2002; p. 17. [Google Scholar]
- Tsuda, Y.; Sako, N.; Eishima, T.; Ito, T.; Arikawa, Y.; Miyamura, N.; Tanaka, A.; Nakasuka, S. University of Tokyo’s CubeSat Project-Its Educational and Technological Significance. In Proceedings of the 15th Annual AIAA/USU Conference on Small Satellites, Logan, TX, USA, 13–16 August 2001; p. 8. [Google Scholar]
- Battagliere, M.L.; Santoni, F.; Piergentili, F.; Ovchinnikov, M.; Graziani, F. Passive magnetic attitude stabilization system of the EduSAT microsatellite. Aerosp. Eng. 2010, 224, 1097–1107. [Google Scholar] [CrossRef]
- Hennepe, F.T.; Zandbergen, B.T.C.; Hamann, R.J. Simulation of the Attitude Behaviour and Available Power Profile of the Delfi-C3 Spacecraft with Application of the OpSim Platform. In Proceedings of the Paper at the 1st CEAS European Air and Space Conference, Berlin, Germany, 10–13 September 2007; p. 9. [Google Scholar]
- Burton, R.; Rock, S.; Springmann, J.; Cutler, J. Online attitude determination of a passively magnetically stabilized spacecraft. Acta Astronaut. 2017, 133, 269–281. [Google Scholar] [CrossRef] [Green Version]
- Miguel, N.; Colombo, C. Deorbiting spacecraft with passively stabilised attitude using a simplified quasi-rhombic-pyramid sail. Adv. Sp. Res. 2020, 67, 2561–2576. [Google Scholar] [CrossRef]
- Xuegang, Z.; Zhencai, Z.; Hongyu, C. Aerodynamic passive stabilization design and flight data analyses for transitional regime satellite LX-1. Acta Astronaut. 2020, 167, 232–238. [Google Scholar] [CrossRef]
- Sarychev, V.A.; Gutnik, S.A. Satellite dynamics under the influence of gravitational and aerodynamic torques. A study of stability of equilibrium positions. Cosm. Res. 2016, 54, 388–398. [Google Scholar] [CrossRef]
- Psiaki, M.L. Nanosatellite attitude stabilization using passive aerodynamics and active magnetic torquing. J. Guid. Control. Dyn. 2004, 27, 347–355. [Google Scholar] [CrossRef]
- Berthet, M.; Yamada, K.; Nagata, Y.; Suzuki, K. Feasibility assessment of passive stabilisation for a nanosatellite with aeroshell deployed by orbit-attitude-aerodynamics simulation platform. Acta Astronaut. 2020, 173, 266–278. [Google Scholar] [CrossRef]
- Ovchinnikov, M.; Ivanov, D.; Pansyrnyi, O.; Sergeev, A.; Fedorov, I.; Selivanov, A.; Khromov, O.; Yudanov, N. Technological NanoSatellite TNS-0 #2 Connected Via Global Communication System. Acta Astronaut. 2020, 170, 1–5. [Google Scholar] [CrossRef]
- Ivanov, D.S.; Ovchinnikov, M.Y.; Pantsyrnyi, O.A.; Selivanov, A.S.; Sergeev, A.S.; Fedorov, I.O.; Khromov, O.E.; Yudanov, N.A. Nanosatellite TNS-0 No.2 Attitude Motion After The Launch From ISS. Cosm. Res. 2019, 57, 272–288. [Google Scholar] [CrossRef]
- Thébault, E.; Finlay, C.C.; Beggan, C.D.; Alken, P.; Aubert, J.; Barrois, O.; Bertrand, F.; Bondar, T.; Boness, A.; Brocco, L.; et al. International Geomagnetic Reference Field: The 12th generation. Earth Planets Sp. 2015, 67, 79. [Google Scholar] [CrossRef]
- Sarychev, V.A.; Penkov, V.I.; Ovchinnikov, M.Y. Mathematical model of hysteresis based on magneto-mechanical analogy. Math. Simul. 1989, 1, 122–133. [Google Scholar]
- Ovchinnikov, M.Y.; Ivanov, D.S.; Ivlev, N.A.; Karpenko, S.O.; Roldugin, D.S.; Tkachev, S.S. Development, integrated investigation, laboratory and in-flight testing of Chibis-M microsatellite ADCS. Acta Astronaut. 2014, 93. [Google Scholar] [CrossRef]
- Ivanov, D.; Ovchinnikov, M.; Ivlev, N.; Karpenko, S. Analytical study of microsatellite attitude determination algorithms. Acta Astronaut. 2015, 116, 339–348. [Google Scholar] [CrossRef]
- Kim, O.-J.; Shim, H.; Yu, S.; Bae, Y.; Kee, C.; Kim, H.; Lee, J.; Han, J.; Han, S.; Choi, Y. In-Orbit Results and Attitude Analysis of the SNUGLITE Cube-Satellite. Appl. Sci. 2020, 10, 2507. [Google Scholar] [CrossRef] [Green Version]
- Beuselinck, T.; Van Bavinchove, C.; Abrashkin, V.I.; Kazakova, A.E.; Sazonov, V.V. Determination of attitude motion of the Foton M-3 satellite according to the data of onboard measurements of the Earth’s magnetic field. Cosm. Res. 2010, 48, 246–259. [Google Scholar] [CrossRef]
- Abrashkin, V.I.; Voronov, K.E.; Piyakov, Y.Y.; Sazonov, V.V.; Semkin, N.D.; Chebukov, S.Y. Attitude motion of the Photon M-4 satellite. Cosm. Res. 2014, 54, 315–322. [Google Scholar] [CrossRef]
- Abrashkin, V.I.; Voronov, K.E.; Piyakov, I.V.; Puzin, Y.Y.; Sazonov, V.V.; Semkin, N.D.; Chebukov, S.Y. Rotational motion of Foton M-4. Cosm. Res. 2016, 54, 296–302. [Google Scholar] [CrossRef]
- Kramer, A.; Bangert, P.; Schilling, K. UWE-4: First Electric Propulsion on a 1U CubeSat—In-Orbit Experiments and Characterization. Aerospace 2020, 7, 98. [Google Scholar] [CrossRef]
- Belokonov, I.V.; Kramlikh, A.V.; Lomaka, I.A.; Nikolaev, P.N. Reconstruction of a Spacecraft’s Attitude Motion Using the Data on the Current Collected from Solar Panels. J. Comput. Syst. Sci. Int. 2019, 58, 286–296. [Google Scholar] [CrossRef]



















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanov, D.; Roldugin, D.; Tkachev, S.; Mashtakov, Y.; Shestakov, S.; Ovchinnikov, M.; Fedorov, I.; Yudanov, N.; Sergeev, A. Transient Attitude Motion of TNS-0#2 Nanosatellite during Atmosphere Re-Entry. Appl. Sci. 2021, 11, 6784. https://0-doi-org.brum.beds.ac.uk/10.3390/app11156784
Ivanov D, Roldugin D, Tkachev S, Mashtakov Y, Shestakov S, Ovchinnikov M, Fedorov I, Yudanov N, Sergeev A. Transient Attitude Motion of TNS-0#2 Nanosatellite during Atmosphere Re-Entry. Applied Sciences. 2021; 11(15):6784. https://0-doi-org.brum.beds.ac.uk/10.3390/app11156784
Chicago/Turabian StyleIvanov, Danil, Dmitry Roldugin, Stepan Tkachev, Yaroslav Mashtakov, Sergey Shestakov, Mikhail Ovchinnikov, Igor Fedorov, Nikolay Yudanov, and Artem Sergeev. 2021. "Transient Attitude Motion of TNS-0#2 Nanosatellite during Atmosphere Re-Entry" Applied Sciences 11, no. 15: 6784. https://0-doi-org.brum.beds.ac.uk/10.3390/app11156784