
DOA Estimation in Low SNR Environment through Coprime Antenna Arrays: An Innovative Approach by Applying Flower Pollination Algorithm

 , , , , ,
, , , , ,  and
and
Abstract
:1. Introduction
Organization and Notation of Paper
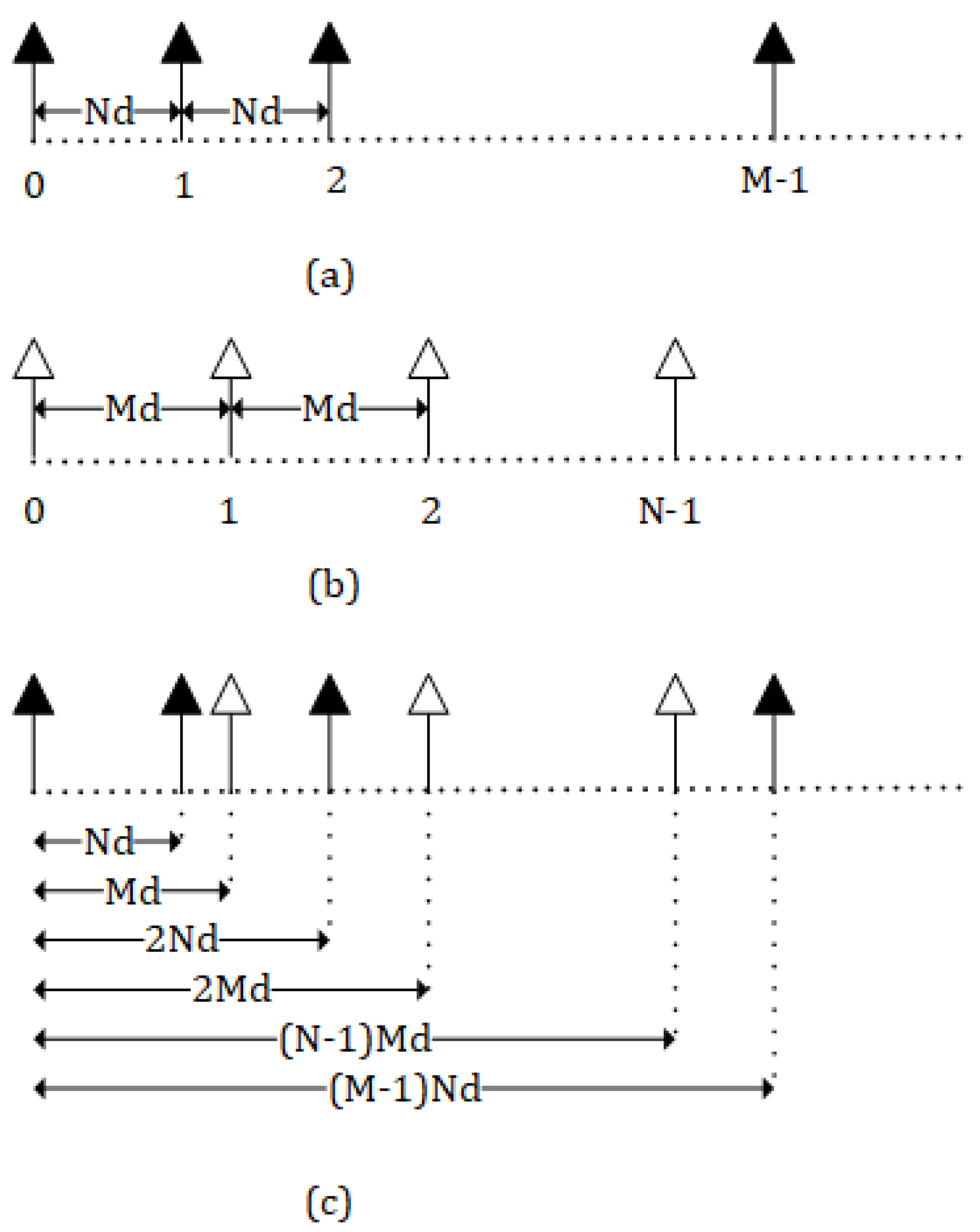
2. Mathematical Modeling
3. Proposed Methodology
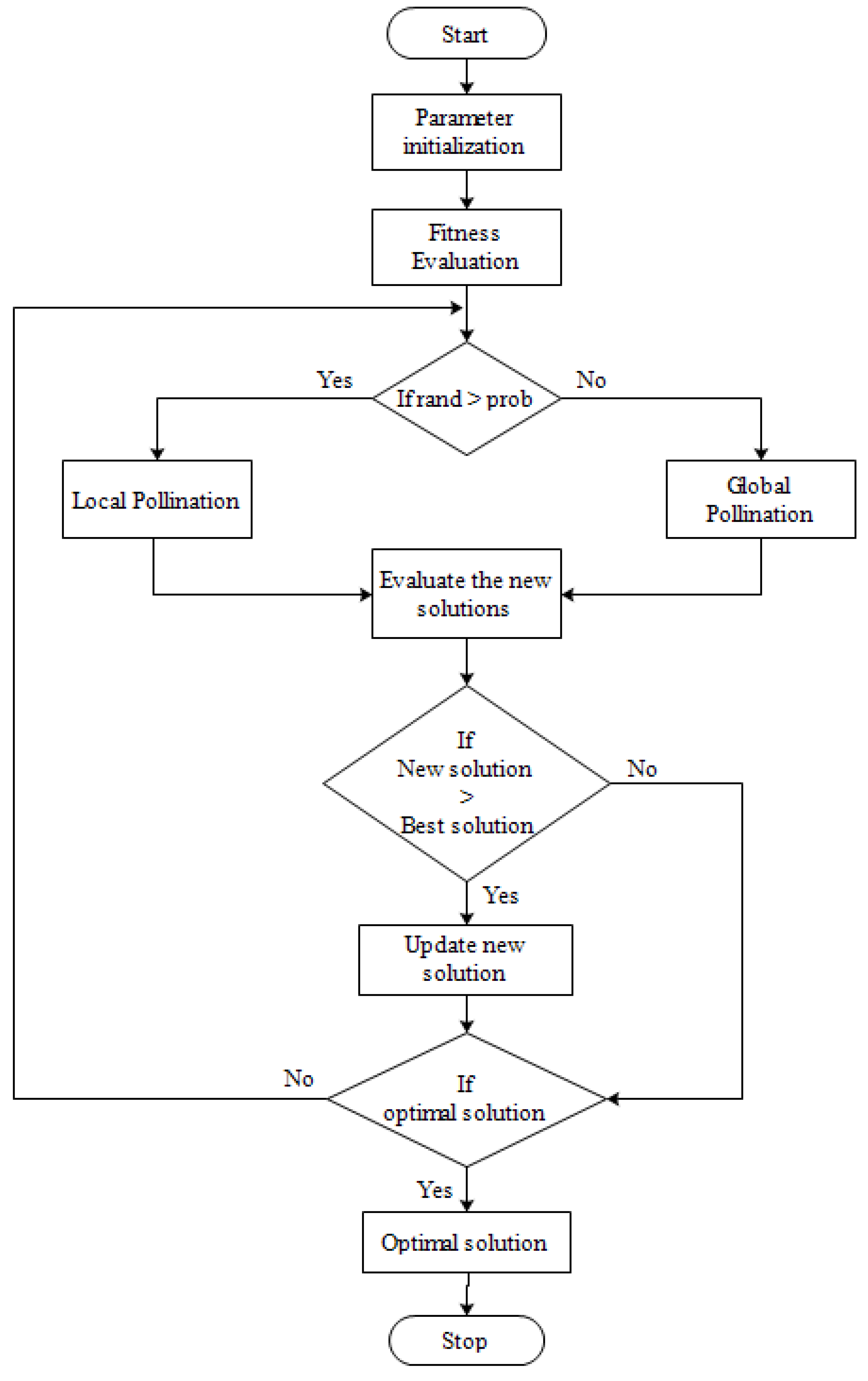
3.1. Flower Pollination Algorithm
- Step 1: Population Generation
- Step 2: Global pollination process
- Step 3: Local pollination process
- Step 4: Update solution
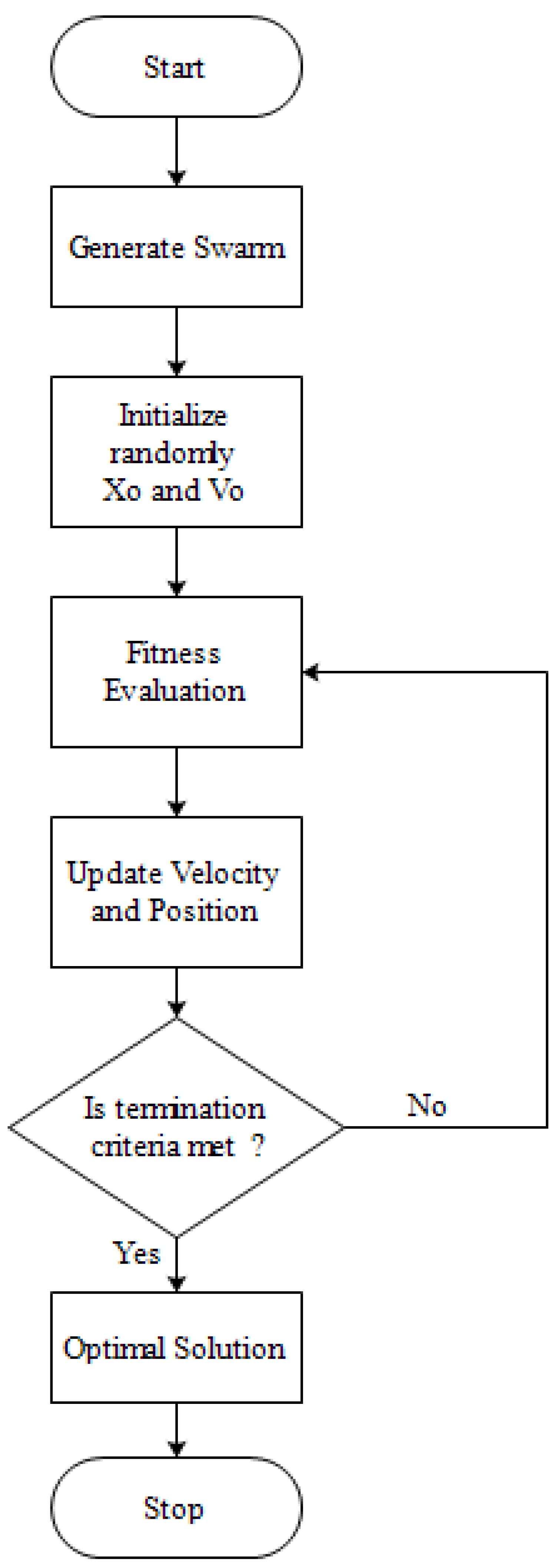
3.2. Particle Swarm Optimization
- Step 1: Initialization:
- Step 2: Evaluate Fitness:
- Step 3: For each particle calculate velocity and position from Equations (1) and (2).
- Step 4: Evaluate Fitness and find current best.
- Step 5: Update t = t + 1.
- Step 6: Output gbest and .
3.3. Fitness Function
4. Results, Discussions and Achievements
4.1. Estimation Accuracy
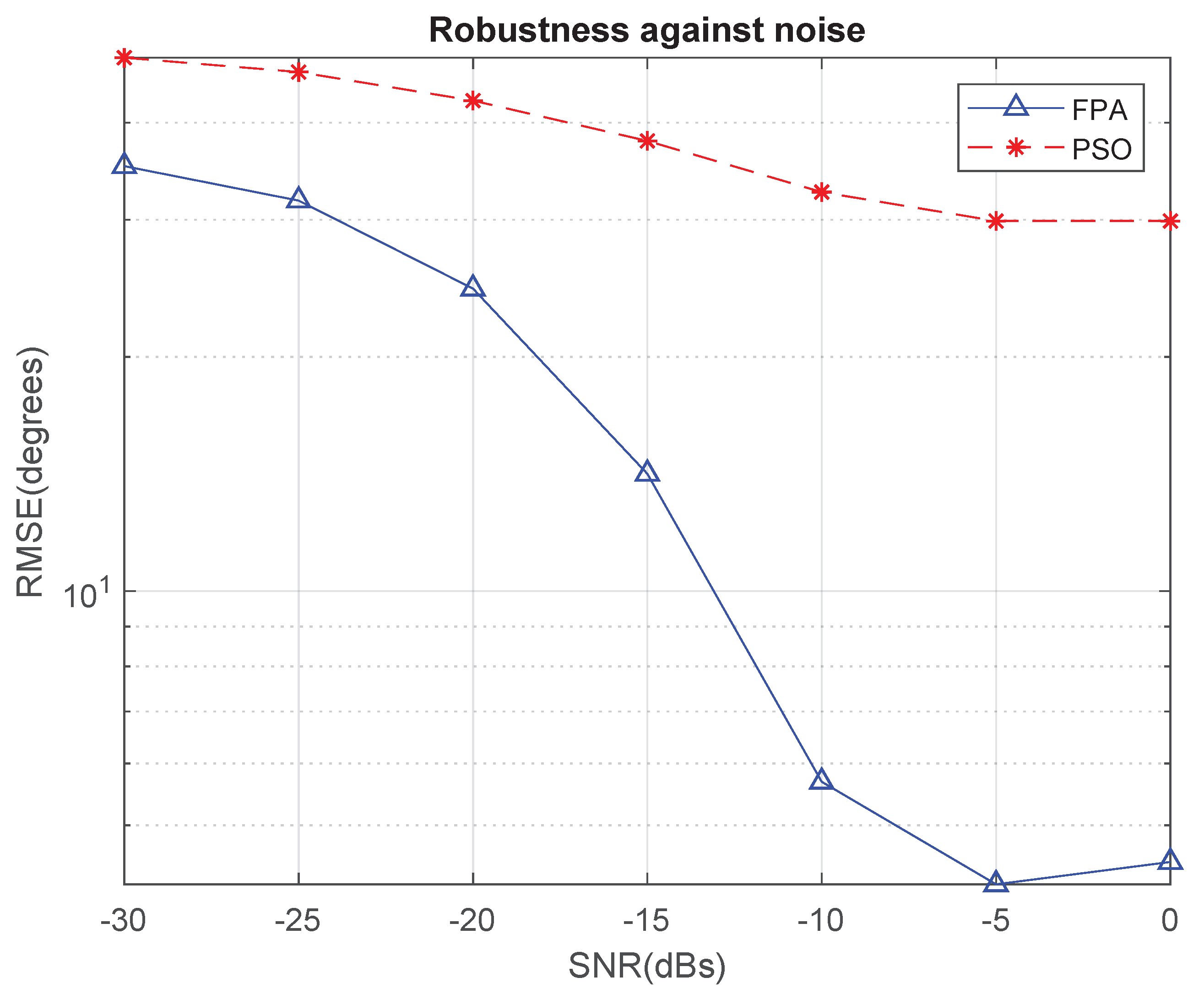
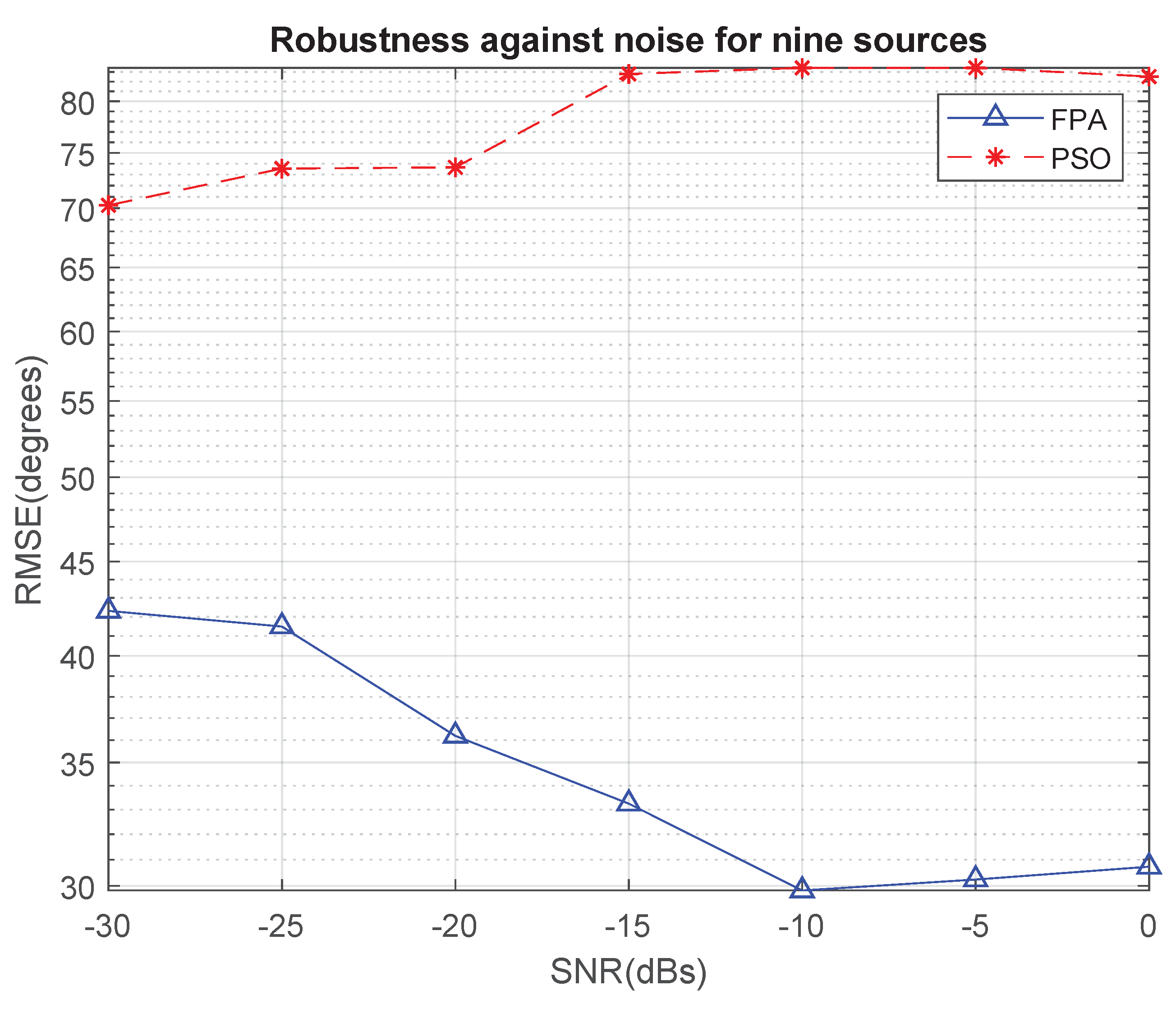
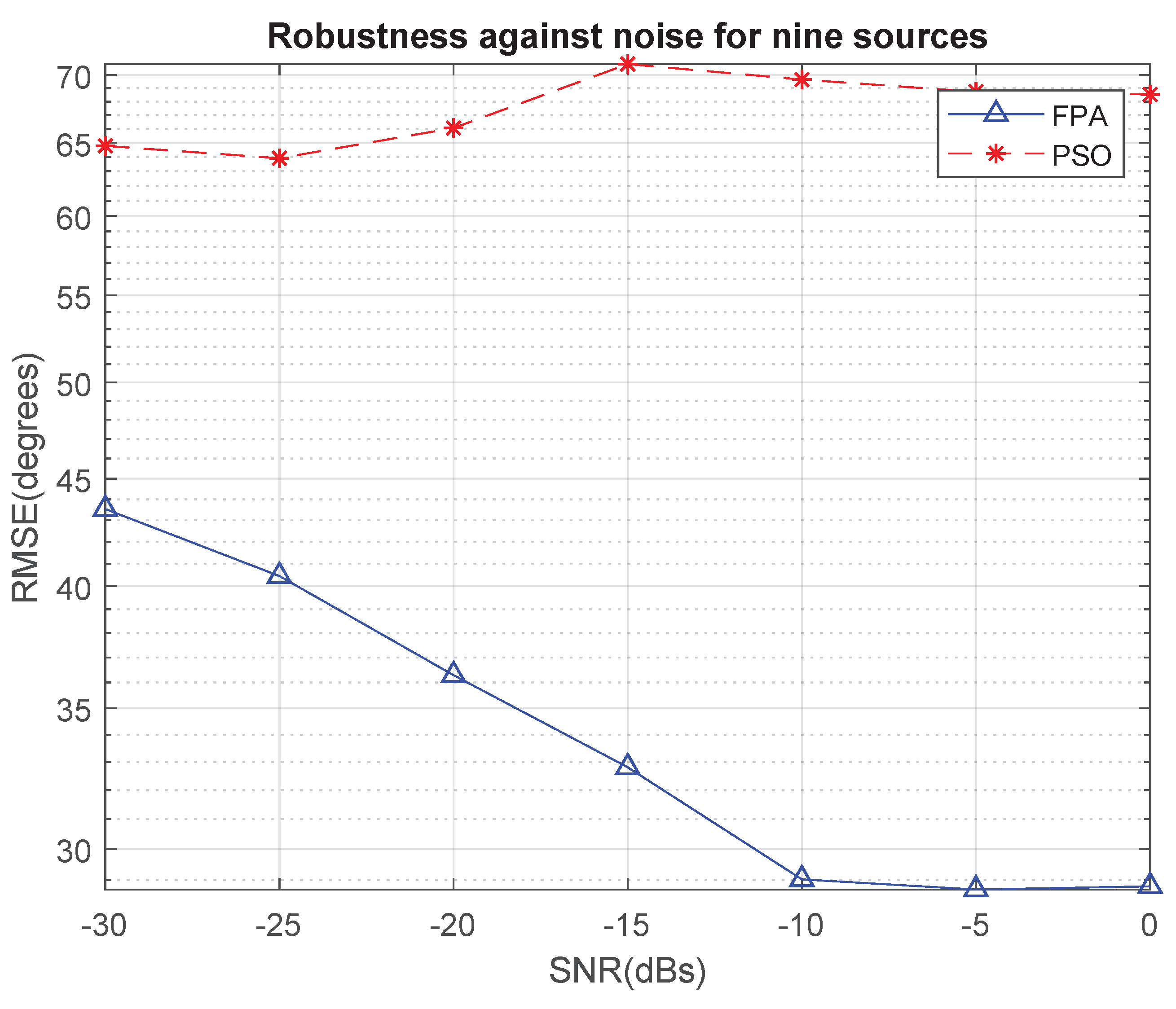
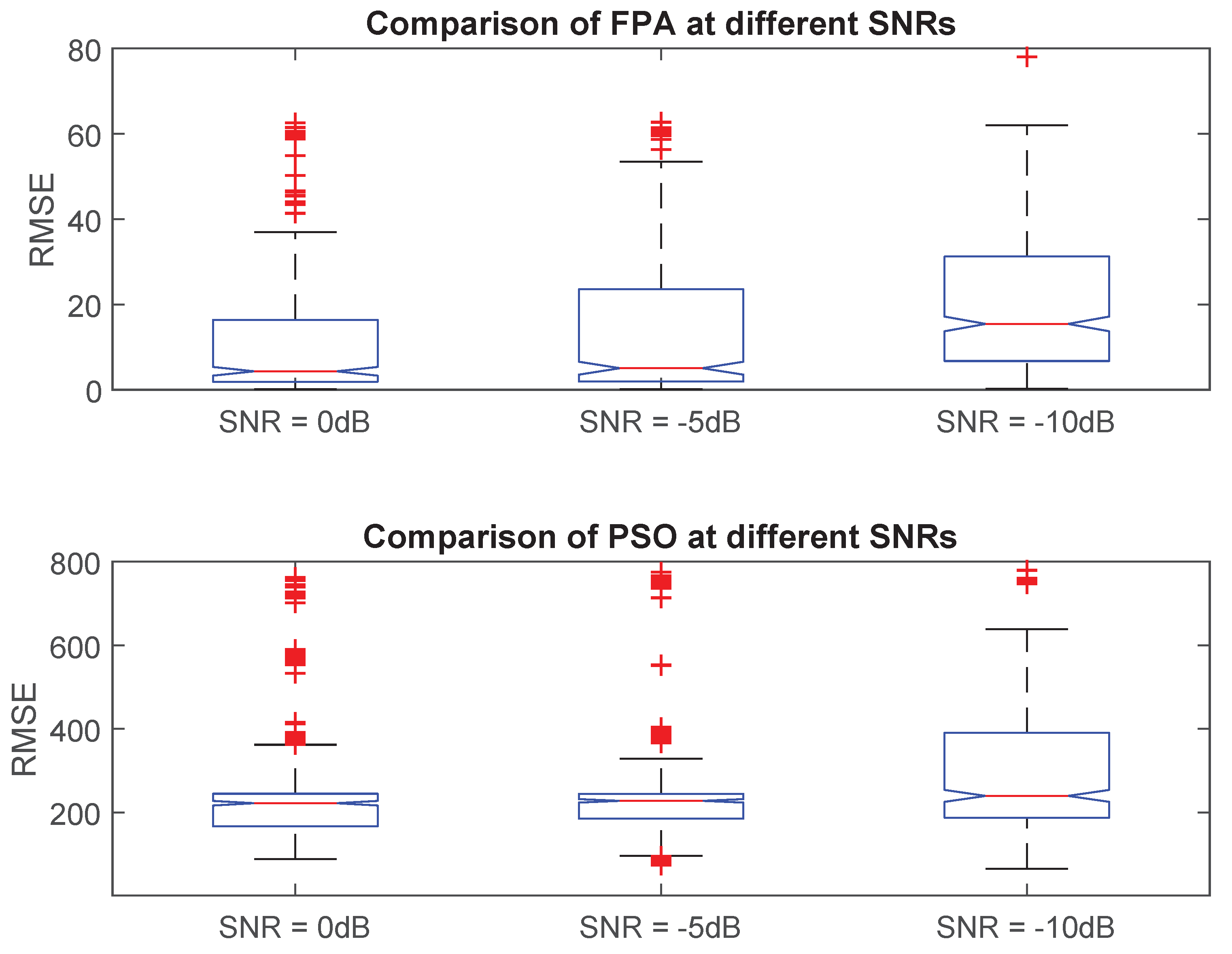
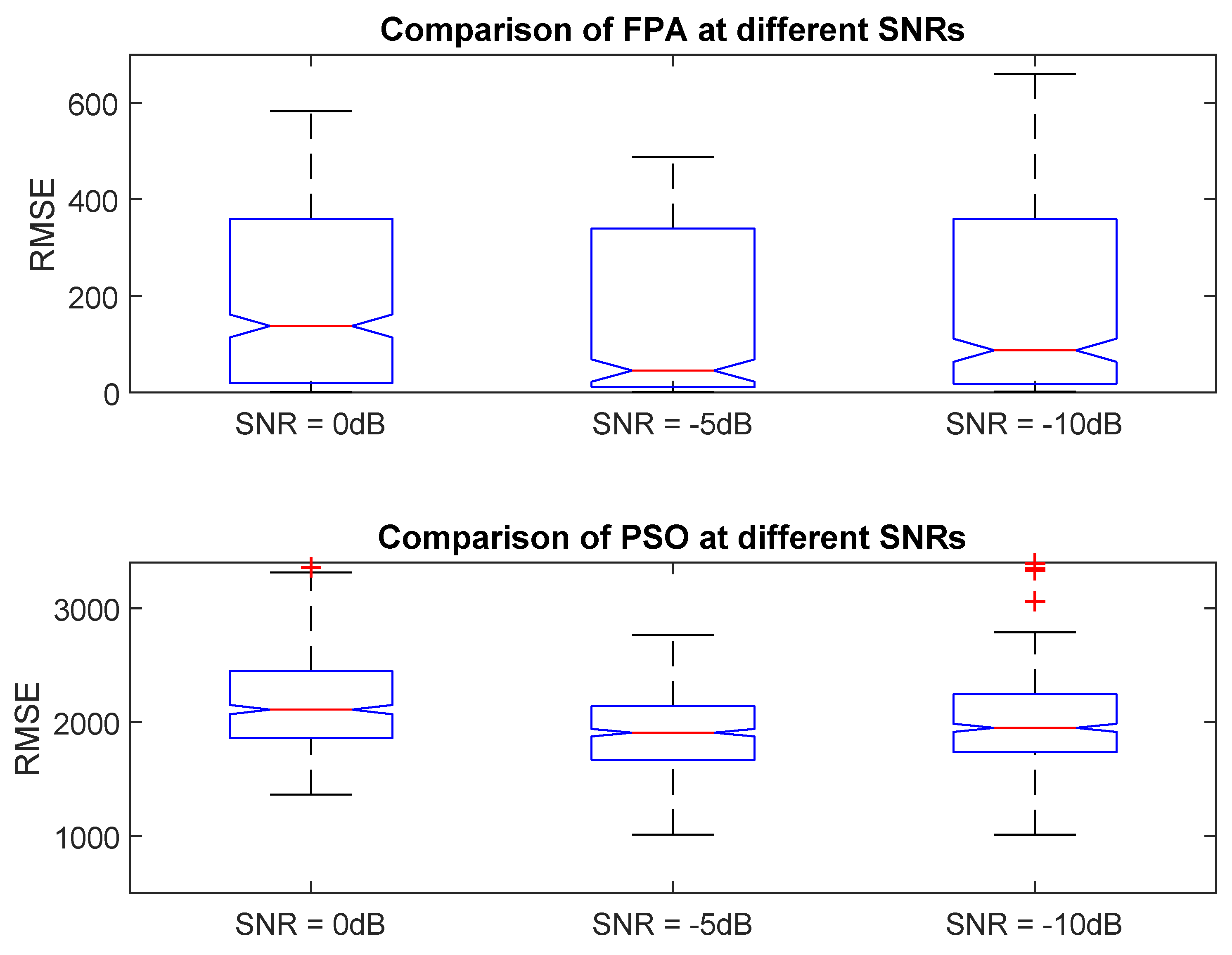
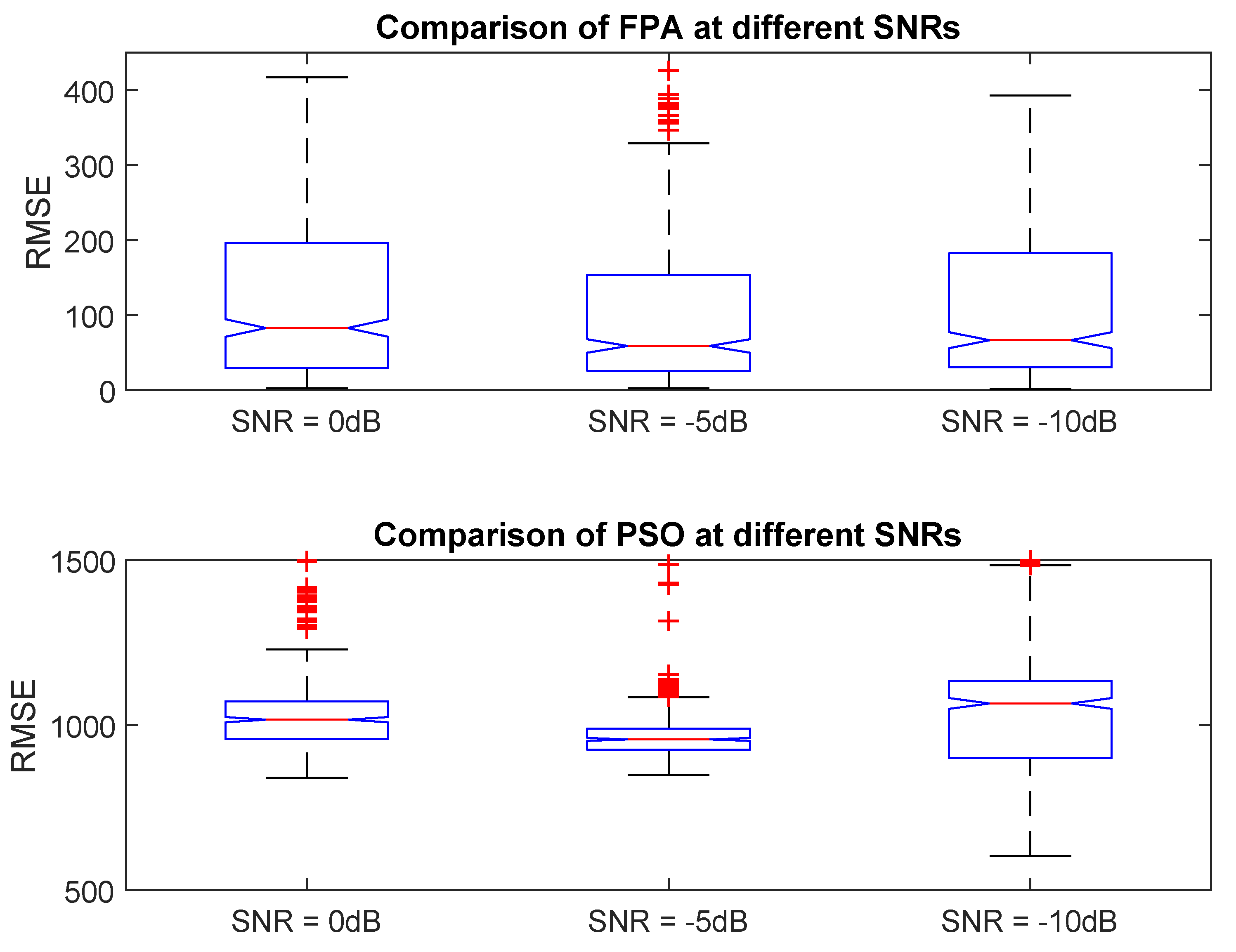
4.2. Robustness against Noise
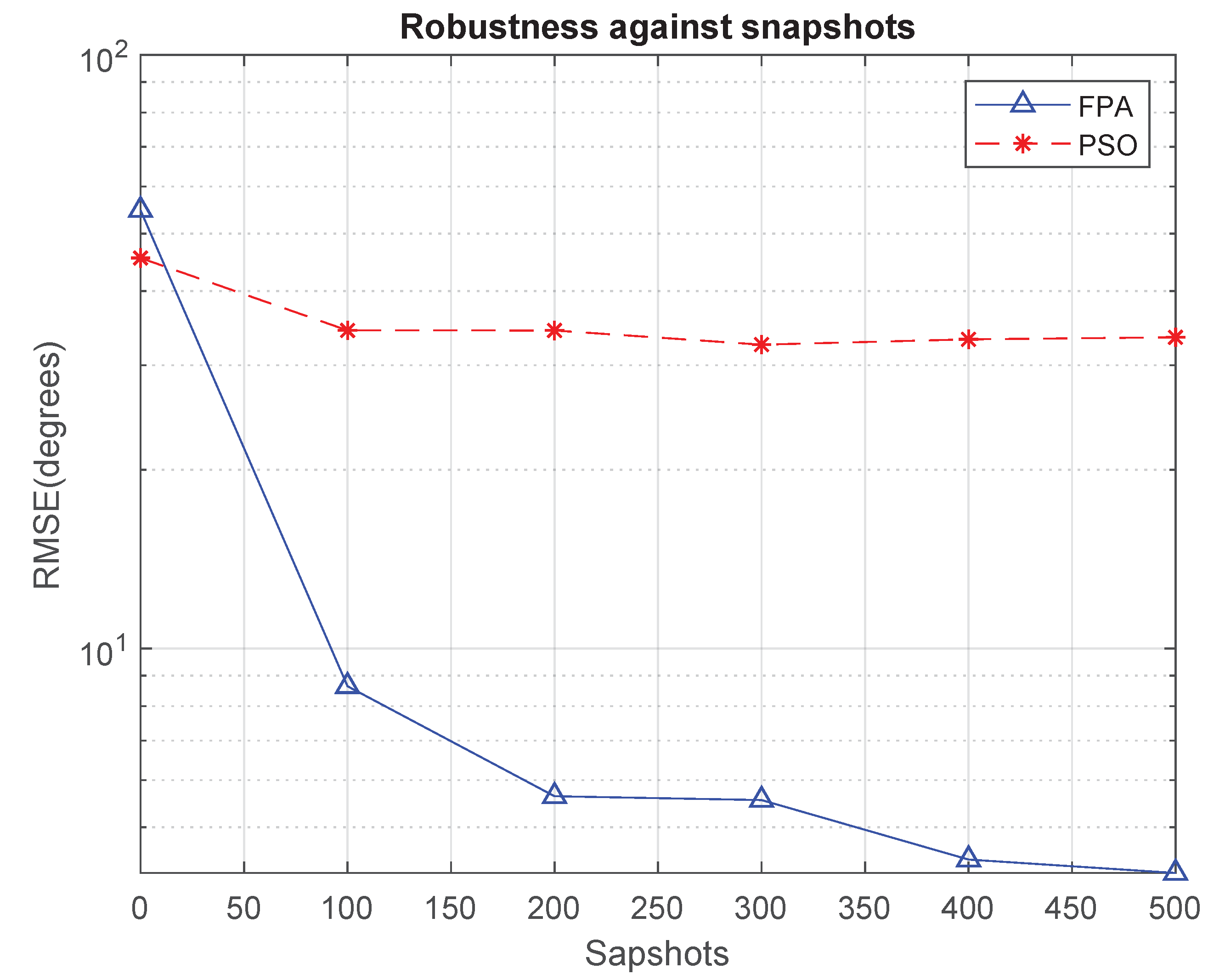
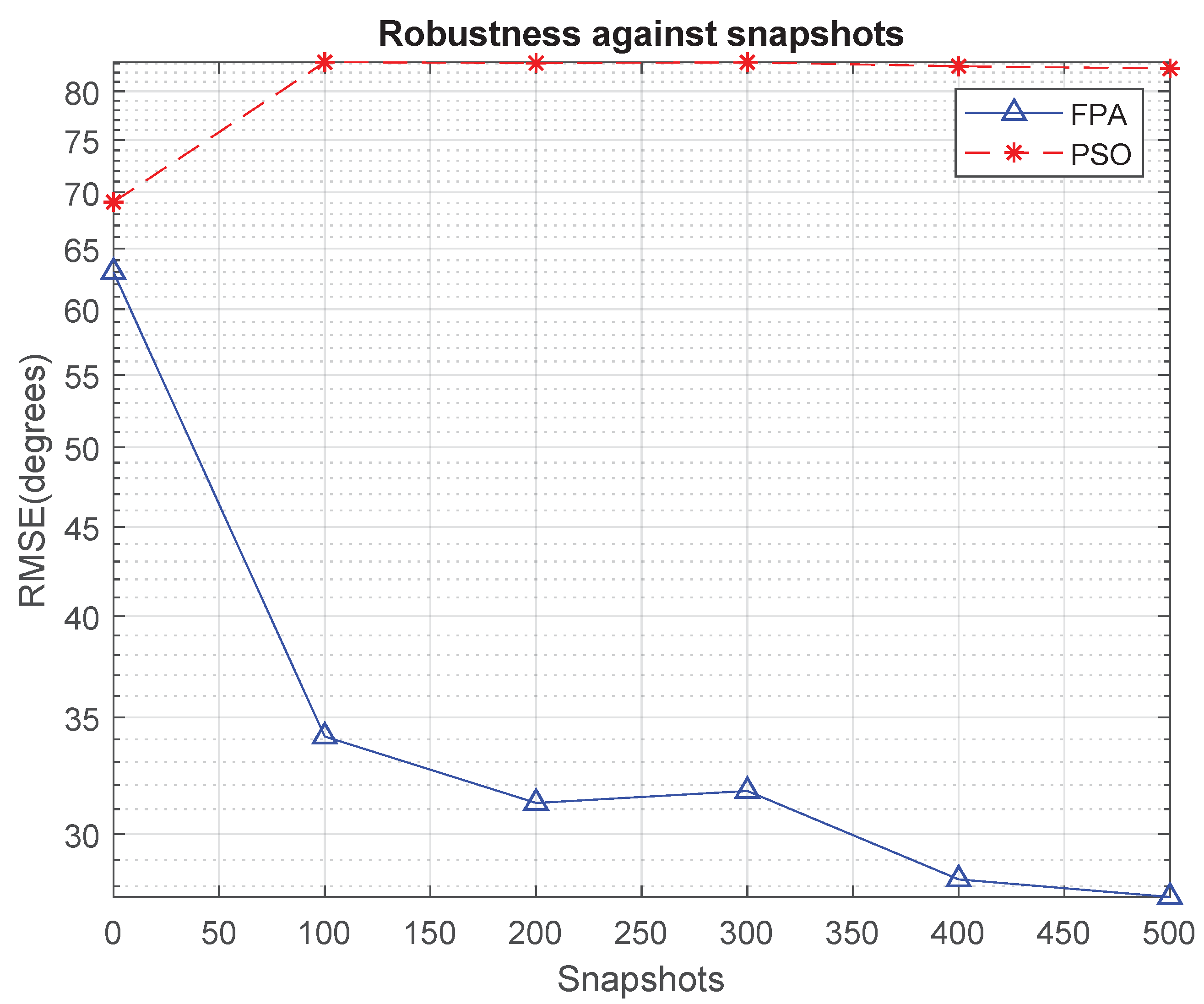
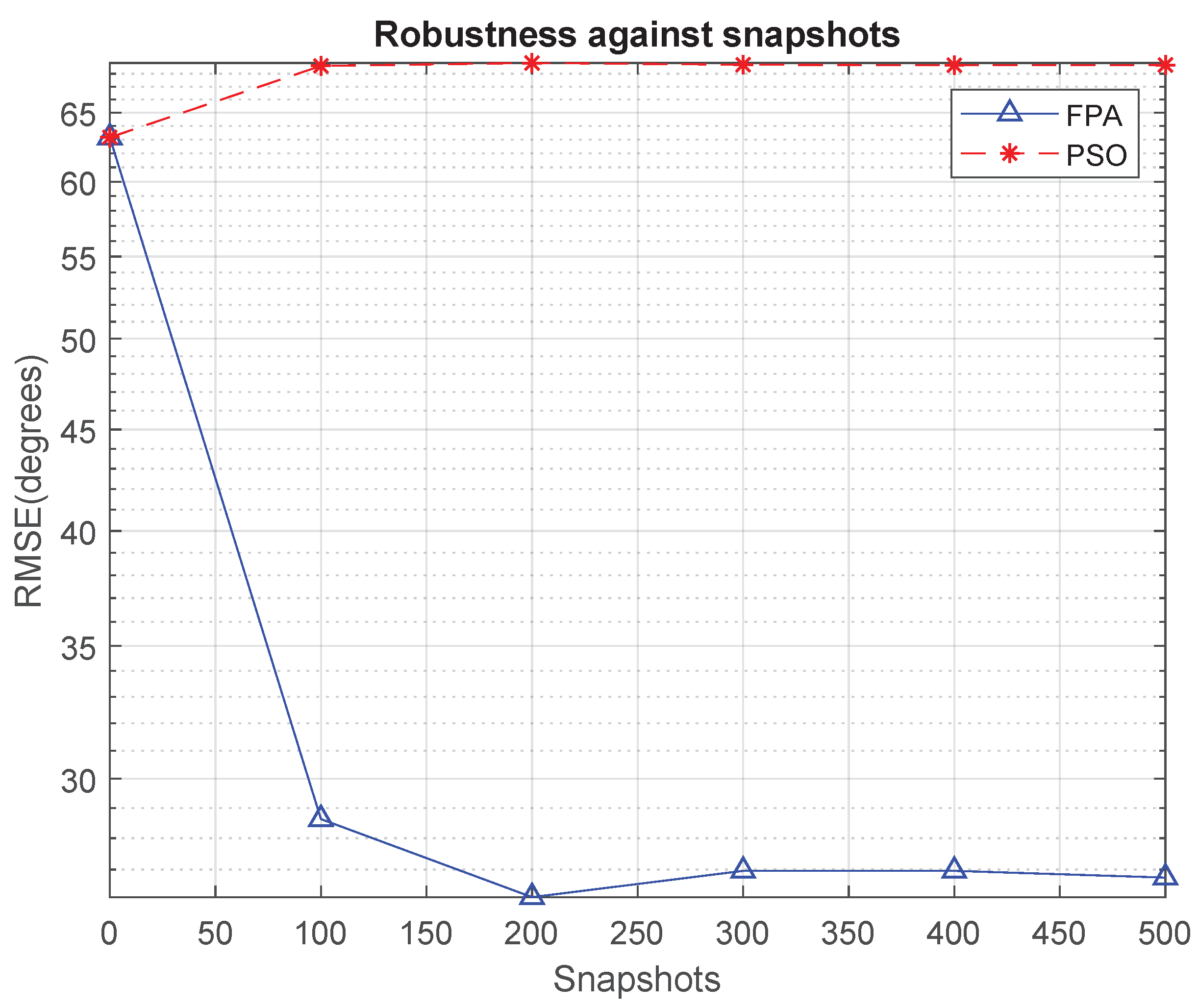
4.3. RMSE Analysis against Multiple Snapshots
4.4. Variation Analysis of RMSE
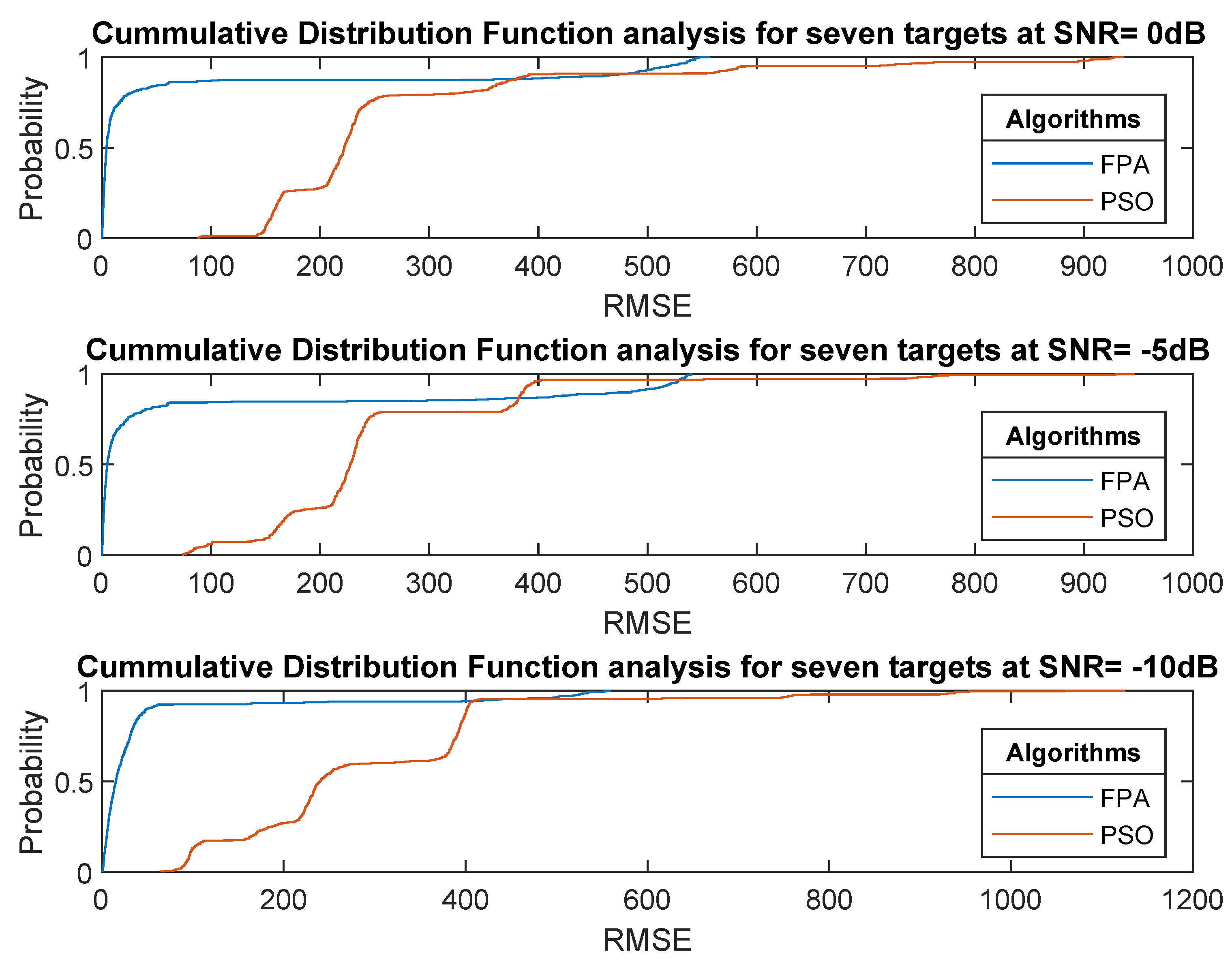
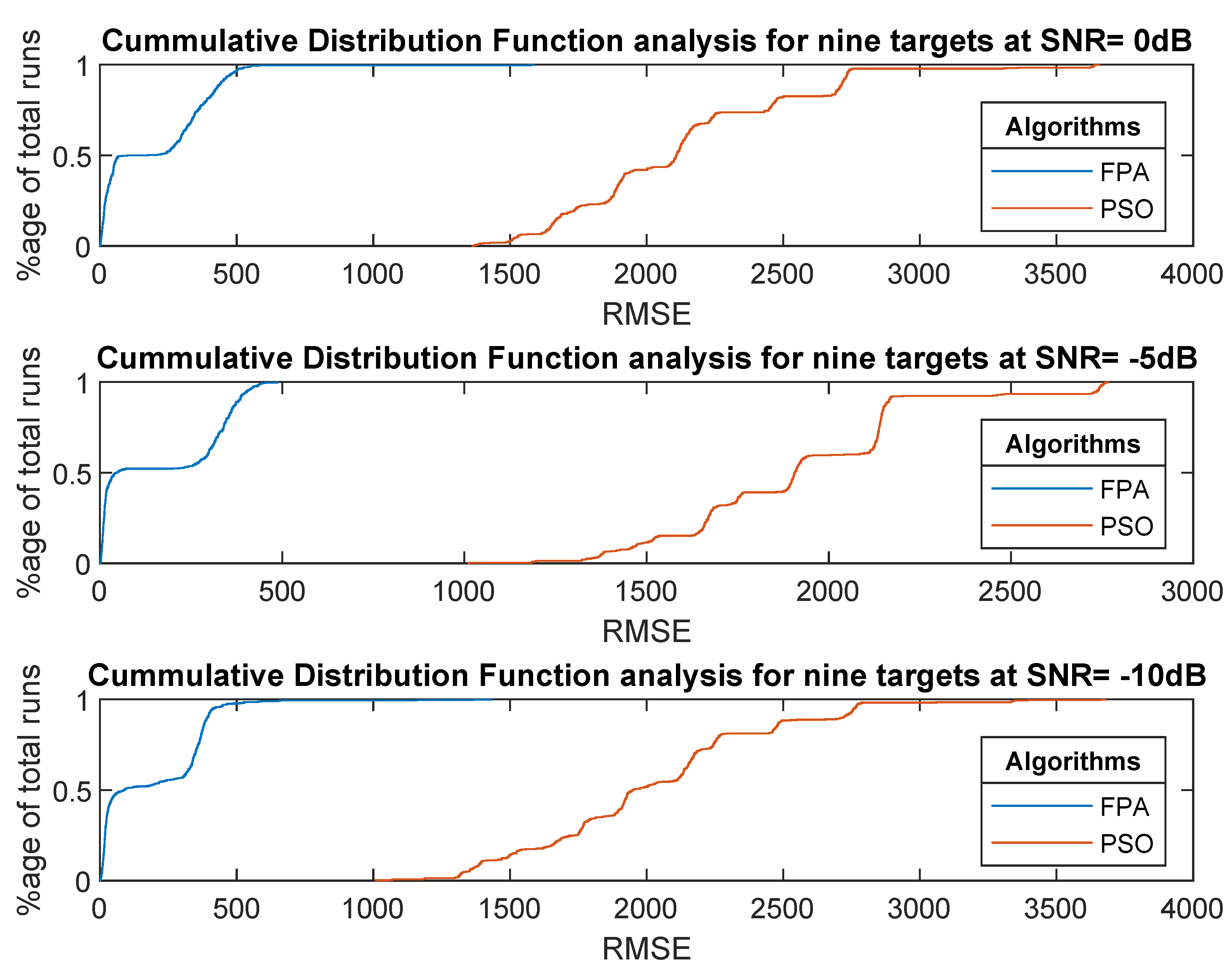
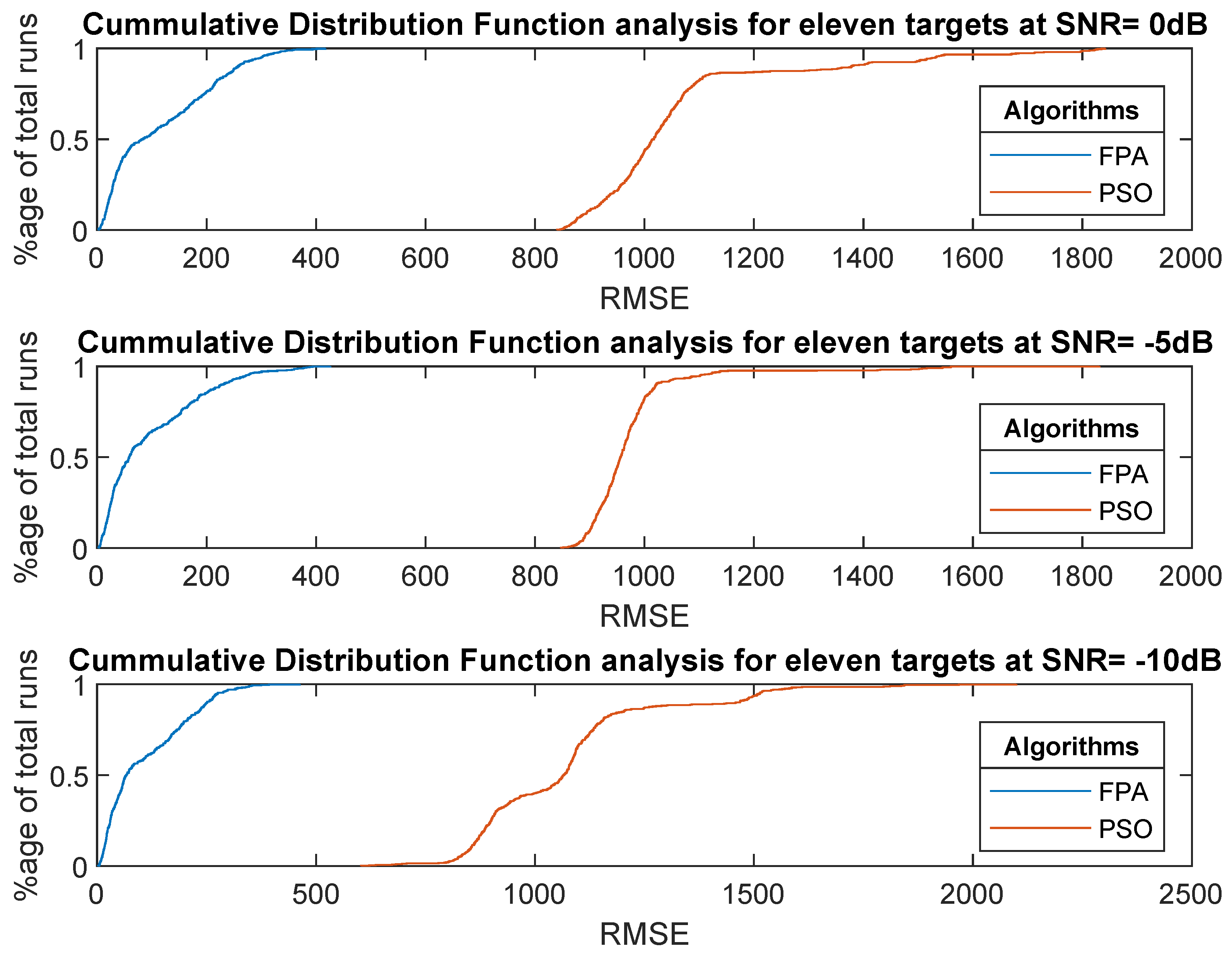
4.5. Cumulative Distribution Function of RMSE
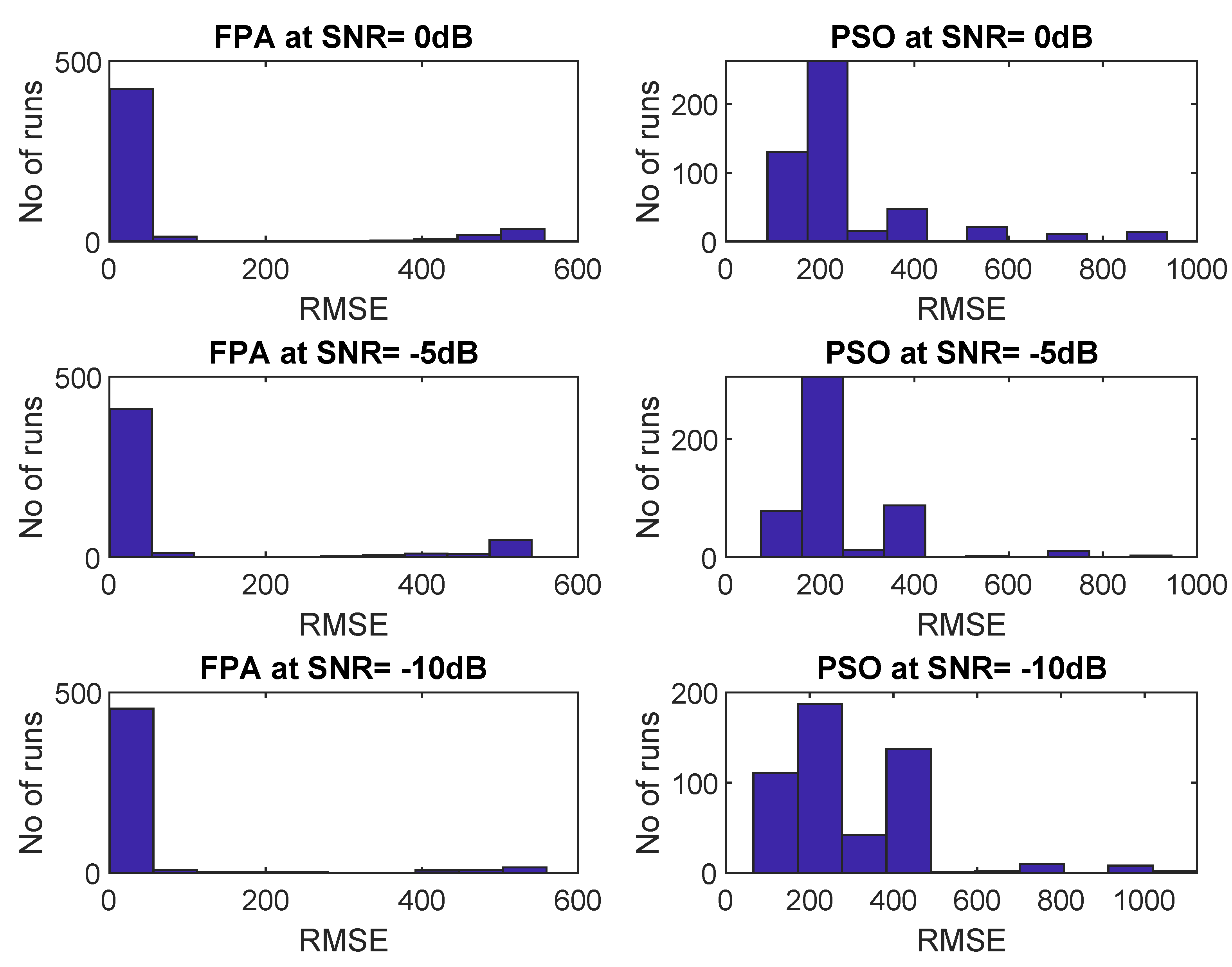
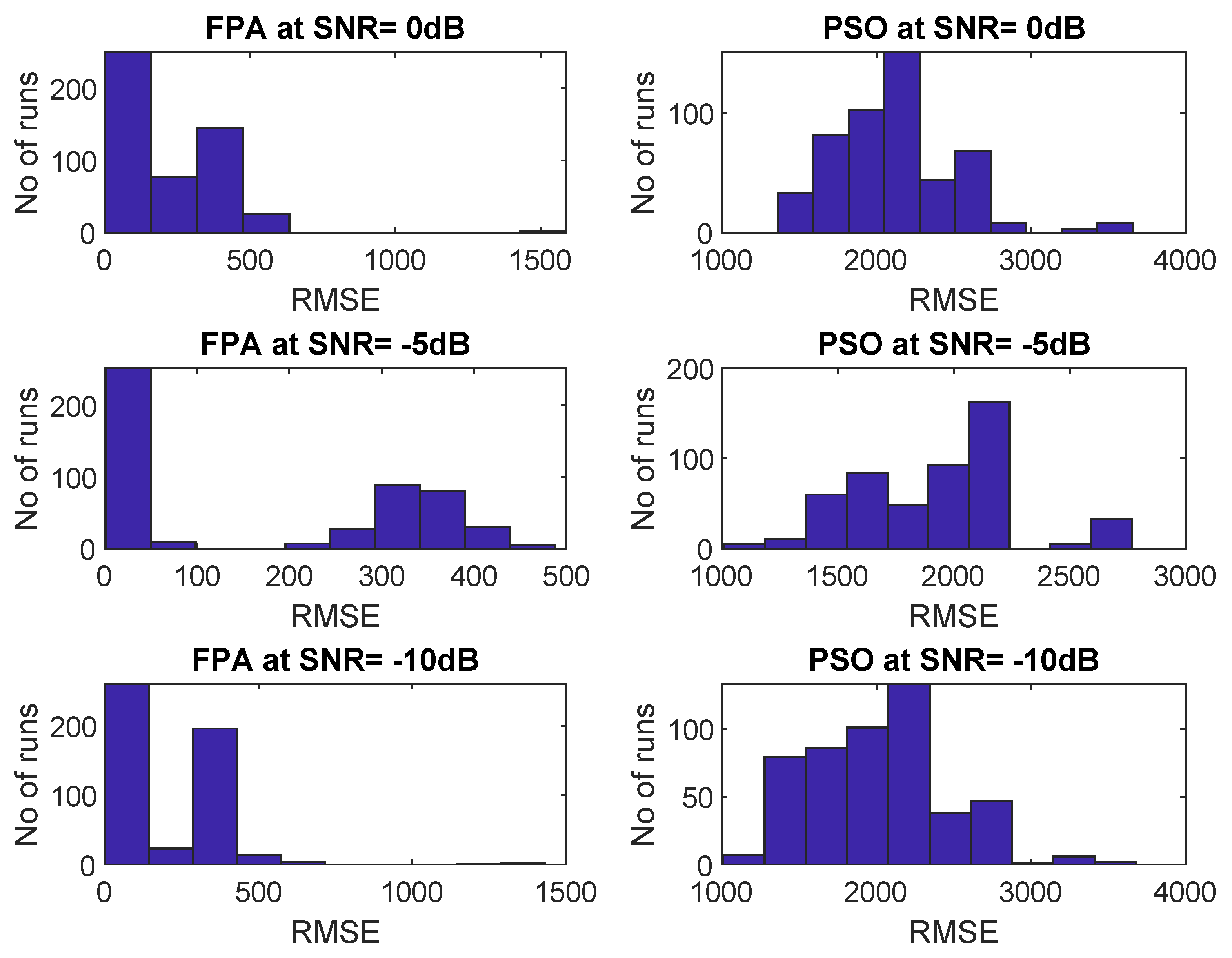
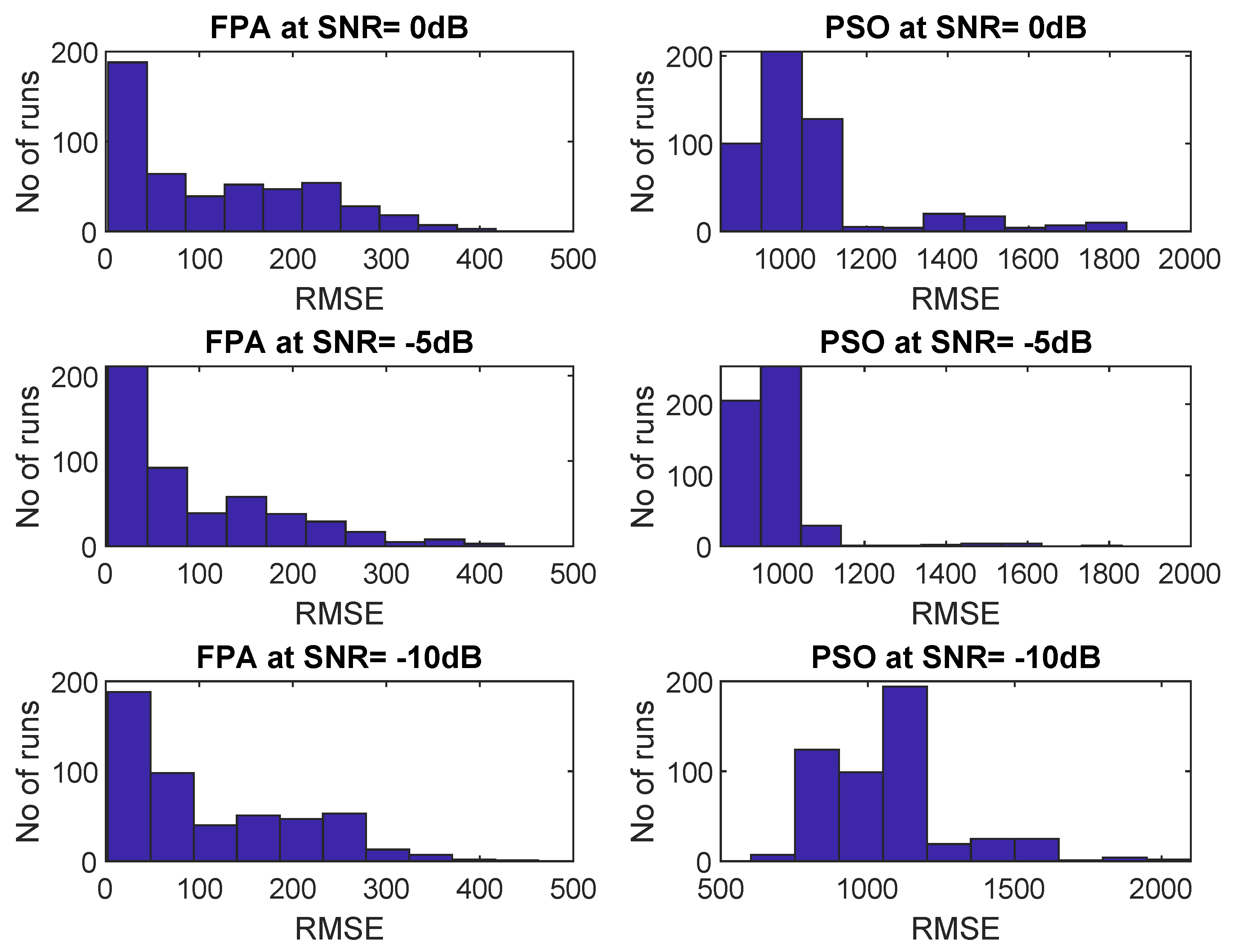
4.6. Histogram Analysis of RMSE
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.; Hu, G.; Zhu, M.; Zhan, C.; Zhao, F.; Zhou, H.; Zhao, F.; Yue, S. DOA estimation based on average processing of redundant virtual array elements for coprime MIMO RADAR. J. Phys. Conf. Ser. 2021, 1894, 012092. [Google Scholar] [CrossRef]
- Wen, F.; Mao, C.; Zhang, G. Direction finding in MIMO RADAR with large antenna arrays and non-orthogonal waveforms. Digit. Signal Process. 2019, 94, 75–83. [Google Scholar] [CrossRef]
- Jing, H.; Wang, H.; Liu, Z.; Shen, X. DOA estimation for underwater target by active detection on virtual time reversal using a uniform linear array. Sensors 2018, 18, 2458. [Google Scholar] [CrossRef] [Green Version]
- Straser, V.; Cataldi, D.; Cataldi, G. Radio direction finding system, a new perspective for global crust diagnosis. New Concepts Glob. Tectonics J. 2018, 6, 203–211. [Google Scholar]
- Wang, J.J.-M.; Liu, J.; Pare, T.E., Jr.; Wu, T.; Bajko, G.; Hsu, Y.-P. Direction Finding and Ftm Positioning in Wireless Local Area Networks. U.S. Patent 10,484,814, 19 November 2019. [Google Scholar]
- Suryavanshi, N.B.; Reddy, K.V.; Chandrika, V.R. Direction finding capability in bluetooth 5.1 standard. In International Conference on Ubiquitous Communications and Network Computing; Springer: Berlin/Heidelberg, Germany, 2019; pp. 53–65. [Google Scholar]
- Qin, S.; Zhang, Y.D.; Amin, M.G.; Himed, B. DOA estimation exploiting a uniform linear array with multiple co-prime frequencies. Signal Process. 2017, 130, 37–46. [Google Scholar] [CrossRef] [Green Version]
- Guo, M.; Zhang, Y.D.; Chen, T. DOA estimation using compressed sparse array. IEEE Trans. Signal Process. 2018, 66, 4133–4146. [Google Scholar] [CrossRef]
- Elbir, A.M. Two-dimensional DOA estimation via shifted sparse arrays with higher degrees of freedom. Circuits Syst. Signal Process. 2019, 38, 5549–5575. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, Y.D. Coprime array-based DOA estimation in unknown nonuniform noise environment. Digit. Signal Process. 2018, 79, 66–74. [Google Scholar] [CrossRef]
- Chen, C.-Y.; Vaidyanathan, P.P. Minimum redundancy mimo radars. In Proceedings of the 2008 IEEE International Symposium on Circuits and Systems, Seattle, WA, USA, 18–21 May 2008; pp. 45–48. [Google Scholar]
- Pal, P.; Vaidyanathan, P.P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Zhang, Y.; Lu, Y.; Ren, S.; Cao, S. Augmented nested arrays with enhanced DOF and reduced mutual coupling. IEEE Trans. Signal Process. 2017, 65, 5549–5563. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Sparse sensing with coprime arrays. In Proceedings of the 2010 Conference Record of the forty Fourth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2010; pp. 1405–1409. [Google Scholar]
- Zheng, Z.; Huang, Y.; Wang, W.; So, H.C. Direction-of-arrival estimation of coherent signals via coprime array interpolation. IEEE Signal Process. Lett. 2020, 27, 585–589. [Google Scholar] [CrossRef]
- Adhikari, K.; Drozdenko, B. Symmetry-imposed rectangular coprime and nested arrays for direction of arrival estimation with multiple signal classification. IEEE Access 2019, 7, 153217–153229. [Google Scholar] [CrossRef]
- Muhammad, M.; Li, M.; Abbasi, Q.H.; Goh, C.; Imran, M. Direction of arrival estimation using hybrid spatial cross-cumulants and root-music. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar]
- Ning, Y.; Ma, S.; Meng, F.; Wu, Q. DOA estimation based on ESPRIT algorithm method for frequency scanning LWA. IEEE Commun. Lett. 2020, 24, 1441–1445. [Google Scholar] [CrossRef]
- Hakam, A.; Shubair, R.M.; Salahat, E. Enhanced DOA estimation algorithms using MVDR and MUSIC. In Proceedings of the 2013 International Conference on Current Trends in Information Technology (CTIT), Dubai, United Arab Emirates, 11–12 December 2013; pp. 172–176. [Google Scholar]
- Wang, P.; Kong, Y.; He, X.; Zhang, M.; Tan, X. An improved squirrel search algorithm for maximum likelihood DOA estimation and application for MEMS vector hydrophone array. IEEE Access 2019, 7, 118343–118358. [Google Scholar] [CrossRef]
- Jaafer, Z.; Goli, S.; Elameer, A.S. Best performance analysis of DOA estimation algorithms. In Proceedings of the 2018 1st Annual International Conference on Information and Sciences (AiCIS), Fallujah, Iraq, 20–21 November 2018; pp. 235–239. [Google Scholar]
- Vikas, B.; Vakula, D. Performance comparision of MUSIC and ESPRIT algorithms in presence of coherent signals for DOA estimation. In Proceedings of the 2017 International conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; Volume 2, pp. 403–405. [Google Scholar]
- Ahmed, N.; Wang, H.; Raja, M.A.Z.; Ali, W.; Zaman, F.; Khan, W.U.; He, Y. Performance analysis of efficient computing techniques for direction of arrival estimation of underwater multi targets. IEEE Access 2021, 9, 33284–33298. [Google Scholar] [CrossRef]
- Yang, X.-S. Flower pollination algorithm for global optimization. In International Conference on Unconventional Computing and Natural Computation; Springer: Berlin/Heidelberg, Germany, 2012; pp. 240–249. [Google Scholar]
- Qamar, M.S.; Tu, S.; Ali, F.; Armghan, A.; Munir, M.F.; Alenezi, F.; Muhammad, F.; Ali, A.; Alnaim, N. Improvement of Traveling Salesman Problem Solution Using Hybrid Algorithm Based on Best-Worst Ant System and Particle Swarm Optimization. Appl. Sci. 2021, 11, 4780. [Google Scholar] [CrossRef]
- Hammed, K.; Ghauri, S.A.; Qamar, M.S. Biological inspired stochastic optimization technique (pso) for DOA and amplitude estimation of antenna arrays signal processing in RADAR communication system. J. Sens. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Hou, Y.; Mao, X. A synthetic layout method for distributed Nested Circular Array based on Ant colony algorithm. In Proceedings of the IET International RADAR Conference (IET IRC 2020), Chongqing, China, 4–6 November 2020; pp. 955–959. [Google Scholar]
- Parsa, S.A.H.; Zadeh, A.E.; Kazemitabar, S.J. A novel modified artificial bee colony for doa estimation. Int. J. Sens. Wirel. Commun. Control 2021, 11, 96–106. [Google Scholar] [CrossRef]
- Jia, W.; Liu, S. Application of Simulated Annealing Genetic Algorithm in DOA estimation technique. Comput. Eng. Appl. 2014, 12, 266–270. [Google Scholar]
- Das, S.; Suganthan, P.N. Differential Evolution: A survey of the state-of-the-art. IEEE Trans. Evol. Comput. 2010, 15, 4–31. [Google Scholar] [CrossRef]
- Chen, H.; Li, H.; Yang, M.; Xiang, C.; Suzuki, M. General Improvements of Heuristic Algorithms for Low Complexity DOA Estimation. Int. J. Antennas Propag. 2019, 2019, 3858794. [Google Scholar] [CrossRef]
- Sallam, T.A.R.; Abdel-Rahman, A.B.; Alghoniemy, M.; Kawasaki, Z. Flower Pollination Algorithm for Adaptive Beamforming of Phased Array Antennas. J. Mach. Intell. 2017, 2, 1–5. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Coprime sampling and the MUSIC algorithm. In Proceedings of the 2011 Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 289–294. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Angles | ||||||||
|---|---|---|---|---|---|---|---|---|
| FPA | Best | 20.554 | 39.328 | 59.914 | 79.794 | 100.400 | 120.194 | 139.941 |
| Mean | 20.184 | 36.820 | 58.325 | 78.922 | 102.355 | 121.292 | 142.981 | |
| Worst | 180.000 | 37.021 | 59.478 | 80.592 | 100.762 | 119.896 | 139.453 | |
| STD | 8.0112 | 7.6306 | 7.3363 | 7.2551 | 7.076 | 6.7608 | 13.0759 | |
| PSO | Best | 22.585 | 37.755 | 59.198 | 79.539 | 96.225 | 106.215 | 120.000 |
| Mean | 23.146 | 34.461 | 52.488 | 63.898 | 80.206 | 100.494 | 119.387 | |
| Worst | 0.000 | 36.178 | 37.319 | 58.481 | 58.711 | 78.657 | 98.202 | |
| STD | 8.8477 | 5.3369 | 10.351 | 15.299 | 19.8711 | 21.992 | 23.3032 |
| Actual Angles | ||||||||
|---|---|---|---|---|---|---|---|---|
| FPA | Best | 20.554 | 39.328 | 59.914 | 79.794 | 100.400 | 120.194 | 139.941 |
| Mean | 14.697 | 38.478 | 59.783 | 80.211 | 98.590 | 121.139 | 141.271 | |
| Worst | 180.000 | 34.132 | 60.093 | 78.950 | 101.367 | 119.340 | 139.785 | |
| STD | 8.5051 | 8.1359 | 7.6892 | 7.8932 | 7.6953 | 7.3345 | 13.8623 | |
| PSO | Best | 24.320 | 39.690 | 59.613 | 79.500 | 98.327 | 110.181 | 120.000 |
| Mean | 24.777 | 32.753 | 51.729 | 63.982 | 80.608 | 100.351 | 119.243 | |
| Worst | 0.261 | 35.533 | 36.028 | 55.937 | 60.200 | 78.614 | 98.036 | |
| STD | 9.7167 | 5.8089 | 11.1897 | 15.428 | 19.3838 | 20.5064 | 21.6453 |
| Actual Angles | ||||||||
|---|---|---|---|---|---|---|---|---|
| FPA | Best | 21.034 | 39.874 | 59.772 | 80.466 | 99.778 | 120.534 | 139.494 |
| Mean | 25.846 | 34.286 | 58.860 | 76.878 | 102.507 | 120.626 | 144.842 | |
| Worst | 179.201 | 31.046 | 58.433 | 76.493 | 103.240 | 121.604 | 145.273 | |
| STD | 7.3575 | 7.0672 | 5.51 | 6.1898 | 5.5168 | 5.5472 | 10.4078 | |
| PSO | Best | 16.144 | 34.875 | 57.315 | 78.143 | 102.429 | 120.000 | 120.000 |
| Mean | 29.010 | 36.222 | 52.800 | 62.549 | 77.717 | 101.883 | 120.000 | |
| Worst | 0.000 | 32.768 | 33.258 | 40.144 | 58.502 | 78.027 | 99.566 | |
| STD | 12.9084 | 6.3004 | 15.559 | 17.1445 | 20.1051 | 19.7943 | 21.6932 |
| Actual Angles | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| FPA | Best | 21.006 | 38.750 | 60.502 | 79.982 | 100.441 | 119.939 | 140.742 | 160.451 | 170.148 |
| Mean | 0.215 | 39.874 | 60.583 | 79.703 | 100.416 | 119.783 | 142.500 | 179.858 | 179.915 | |
| Worst | 0.000 | 38.758 | 58.943 | 80.572 | 100.388 | 120.260 | 142.292 | 1.398 | 0.000 | |
| STD | 14.2678 | 18.1622 | 14.7291 | 14.3368 | 14.2258 | 13.776 | 13.9762 | 13.5198 | 9.3947 | |
| PSO | Best | 1.186 | 37.058 | 59.335 | 82.653 | 96.478 | 120.000 | 104.940 | 75.794 | 0.000 |
| Mean | 31.074 | 41.587 | 55.661 | 80.701 | 100.348 | 118.800 | 65.155 | 0.000 | 0.000 | |
| Worst | 38.524 | 38.120 | 56.432 | 79.084 | 98.278 | 0.339 | 0.000 | 62.001 | 0.000 | |
| STD | 19.9584 | 39.6766 | 41.721 | 38.3223 | 44.4625 | 50.1277 | 56.1085 | 59.8789 | 52.0099 |
| Actual Angles | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| FPA | Best | 20.063 | 40.167 | 59.702 | 79.861 | 100.205 | 120.889 | 140.965 | 162.774 | 171.189 |
| Mean | 23.035 | 34.792 | 57.209 | 80.132 | 100.174 | 116.792 | 129.355 | 154.086 | 156.307 | |
| Worst | 11.371 | 36.931 | 59.788 | 78.922 | 99.862 | 120.054 | 134.764 | 151.199 | 0.250 | |
| STD | 10.8943 | 14.1462 | 13.4699 | 13.8556 | 14.1729 | 13.4184 | 13.5677 | 13.3974 | 9.9573 | |
| PSO | Best | 0.885 | 36.881 | 59.177 | 79.224 | 97.356 | 120.000 | 120.000 | 105.922 | 0.000 |
| Mean | 31.074 | 41.587 | 55.661 | 80.701 | 100.348 | 118.800 | 65.155 | 0.000 | 0.000 | |
| Worst | 38.524 | 38.120 | 56.432 | 79.084 | 98.278 | 0.339 | 0.000 | 62.001 | 0.000 | |
| STD | 19.9206 | 39.5109 | 31.5467 | 36.5097 | 42.1808 | 48.2541 | 54.0918 | 57.903 | 50.7356 |
| Actual Angles | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| FPA | Best | 18.168 | 38.385 | 59.174 | 79.491 | 101.673 | 119.234 | 140.863 | 158.025 | 170.230 |
| Mean | 0.000 | 32.733 | 58.255 | 77.206 | 101.260 | 117.178 | 127.036 | 148.510 | 169.016 | |
| Worst | 11.230 | 38.897 | 61.967 | 79.402 | 100.536 | 119.506 | 143.753 | 2.138 | 0.000 | |
| STD | 11.5865 | 15.2439 | 15.913 | 15.1088 | 15.3368 | 13.0878 | 13.8784 | 12.2759 | 11.0899 | |
| PSO | Best | 0.371 | 36.758 | 59.827 | 79.031 | 97.880 | 120.000 | 120.000 | 106.209 | 0.000 |
| Mean | 29.041 | 41.913 | 59.563 | 80.782 | 102.079 | 119.840 | 73.947 | 0.000 | 0.000 | |
| Worst | 37.783 | 37.524 | 59.243 | 78.662 | 99.615 | 58.886 | 0.000 | 0.000 | 0.000 | |
| STD | 19.9239 | 39.508 | 40.2039 | 36.9535 | 42.1866 | 48.3715 | 55.2631 | 58.0799 | 51.2382 |
| Actual Angles | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FPA | Best | 20.399 | 34.092 | 50.469 | 66.942 | 80.878 | 95.569 | 109.970 | 118.790 | 134.319 | 150.301 | 160.555 |
| Mean | 17.832 | 20.145 | 40.542 | 55.367 | 73.083 | 89.377 | 104.883 | 115.665 | 124.661 | 145.335 | 149.661 | |
| Worst | 2.486 | 28.774 | 44.332 | 58.798 | 74.446 | 89.797 | 103.624 | 118.702 | 136.652 | 148.535 | 0.257 | |
| STD | 12.8879 | 13.0721 | 9.6502 | 10.2882 | 10.2654 | 10.3802 | 10.0996 | 8.9518 | 9.696 | 9.9422 | 12.3896 | |
| PSO | Best | 33.810 | 45.343 | 60.019 | 73.433 | 82.736 | 92.641 | 112.055 | 120.000 | 101.111 | 0.000 | 0.000 |
| Mean | 1.489 | 32.933 | 54.975 | 65.939 | 75.908 | 97.667 | 110.797 | 119.215 | 85.444 | 42.657 | 0.000 | |
| Worst | 0.653 | 38.887 | 39.501 | 63.090 | 83.131 | 74.659 | 96.677 | 114.281 | 55.525 | 0.489 | 0.276 | |
| STD | 19.8683 | 34.3679 | 23.1016 | 23.4132 | 27.2577 | 30.5871 | 34.19 | 33.4794 | 37.3056 | 39.7499 | 45.8505 |
| Actual Angles | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FPA | Best | 23.21 | 34.09 | 51.73 | 66.56 | 80.511 | 94.689 | 109.868 | 121.81 | 136.79 | 150.969 | 165.004 |
| Mean | 2.178 | 31.737 | 48.094 | 67.517 | 83.290 | 98.378 | 112.733 | 121.49 | 137.75 | 143.524 | 180 | |
| Worst | 2.998 | 34.678 | 40.895 | 60.643 | 76.488 | 93.857 | 107.342 | 115.7 | 127.69 | 143.557 | 0.603 | |
| STD | 11.2746 | 10.9455 | 9.9859 | 9.763 | 9.5543 | 9.17 | 7.709 | 6.8242 | 8.9132 | 10.3684 | 11.8853 | |
| PSO | Best | 0.000 | 32.31 | 41.51 | 68.749 | 80.010 | 94.0313 | 106.08 | 120 | 114.28 | 57.657 | 0.977 |
| Mean | 0.601 | 32.904 | 55.206 | 66.032 | 77.191 | 90.0479 | 112.28 | 119.11 | 101.44 | 40.682 | 0.703 | |
| Worst | 38.766 | 38.310 | 57.192 | 64.507 | 82.03 | 96.142 | 114.12 | 73.873 | 2.232 | 1.491 | 0.000 | |
| STD | 19.7599 | 34.0793 | 18.3588 | 25.726 | 25.3566 | 29.5459 | 33.0406 | 29.977 | 33.9386 | 37.9637 | 45.2615 |
| Actual Angles | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FPA | Best | 19.25 | 36.78 | 51.86 | 64.31 | 79.67 | 96.18 | 110.49 | 120.45 | 135.79 | 153.02 | 166.20 |
| Mean | 28.37 | 34.49 | 55.83 | 72.93 | 88.82 | 104.98 | 116.67 | 125.51 | 144.95 | 153.74 | 179.04 | |
| Worst | 29.76 | 37.34 | 55.15 | 72.85 | 89.77 | 106.00 | 0.25 | 121.24 | 143.21 | 146.09 | 0.000 | |
| STD | 12.1514 | 11.0382 | 10.2101 | 10.6042 | 11.3763 | 11.875 | 7.0773 | 7.7574 | 9.3693 | 10.463 | 11.8565 | |
| PSO | Best | 0.00 | 30.76 | 40.60 | 65.41 | 83.42 | 95.62 | 106.44 | 120 | 114.23 | 74.80 | 55.77 |
| Mean | 0.00 | 34.07 | 39.52 | 64.19 | 84.78 | 99.33 | 111.87 | 117.29 | 73.77 | 53.86 | 0.00 | |
| Worst | 38.82 | 38.12 | 38.20 | 60.94 | 75.77 | 58.90 | 111.06 | 117.28 | 0.13 | 0.26 | 0.41 | |
| STD | 19.7866 | 33.973 | 21.9043 | 25.7832 | 28.1443 | 31.7251 | 36.0186 | 33.9977 | 34.4507 | 38.2707 | 46.2669 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hameed, K.; Tu, S.; Ahmed, N.; Khan, W.; Armghan, A.; Alenezi, F.; Alnaim, N.; Qamar, M.S.; Basit, A.; Ali, F. DOA Estimation in Low SNR Environment through Coprime Antenna Arrays: An Innovative Approach by Applying Flower Pollination Algorithm. Appl. Sci. 2021, 11, 7985. https://0-doi-org.brum.beds.ac.uk/10.3390/app11177985
Hameed K, Tu S, Ahmed N, Khan W, Armghan A, Alenezi F, Alnaim N, Qamar MS, Basit A, Ali F. DOA Estimation in Low SNR Environment through Coprime Antenna Arrays: An Innovative Approach by Applying Flower Pollination Algorithm. Applied Sciences. 2021; 11(17):7985. https://0-doi-org.brum.beds.ac.uk/10.3390/app11177985
Chicago/Turabian StyleHameed, Khurram, Shanshan Tu, Nauman Ahmed, Wasim Khan, Ammar Armghan, Fayadh Alenezi, Norah Alnaim, Muhammad Salman Qamar, Abdul Basit, and Farman Ali. 2021. "DOA Estimation in Low SNR Environment through Coprime Antenna Arrays: An Innovative Approach by Applying Flower Pollination Algorithm" Applied Sciences 11, no. 17: 7985. https://0-doi-org.brum.beds.ac.uk/10.3390/app11177985