1. Introduction
The use of robotic systems to carry out on-orbit operations is highly desirable because it limits the need for astronaut intervention in extreme environments, meaning missions can be executed within shortened timescales and with higher levels of human safety. Therefore, the study of related theories and technologies has received considerable attention [
1,
2,
3,
4,
5,
6], etc. The first space robot is the “Canadian Arm” developed in Canada. In the early 1980s, it began to work in space. It is used for loading and unloading loads from the US space shuttle, capturing floating loads, inspecting the space shuttle’s insulating outer layer, and providing mobile platforms for astronauts. Until 2011, when the space robot retired and stopped working, five identical robotic arms completed 34 different tasks in space, including assisting astronauts in repairing the Hubble Telescope. In the 1990s, Canada developed two more space robots. One is the Canadian two-arm (also known as SSRMS or Canadarm2) mainly used to assemble the International Space Station, and the other is the Canadian dexterous arm (also known as SPDM or DEXTRE) for repairing the space station. With the gradual development of space manipulators, the structure and performance of space robots are also becoming mature. The space robot is mainly composed of a floating base and robotic links. To expand its working range and improve the work efficiency, a parallel guide rail is usually installed on the base of the space robot. The robotic links move on the guide rail, which vibrates easily [
7]. To reduce the launch cost and improve the dexterity of work, the robotic link is usually designed into a lightweight, slender structure that is driven by harmonic flexible wheels. The slender link easily causes vibrations at the end effector [
8]. The flexible driver causes asynchrony between the rotation angle of the motor rotor and the actual rotation angle of the joint, resulting in joint vibration [
9]. Therefore, it is of practical significance to consider the flexibility of the base, joints and links of the space robot.
The application scope of space robots mainly includes repairing or recycling ineffective satellites, adding fuel to target satellites, building space stations, and cleaning orbital garbage. More and more space junk is being left as a result of space exploration. According to NASA statistics, there are about 500,000 spacecraft fragments larger than a marble, and about 20,000 larger than a baseball. At present, space junk is still being produced. For example, the collision between Iridium 33 and the Cosmos-2251 satellite in 2009 created another wave of hazardous waste. When performing the above tasks, which include capturing space junk, the end effector of the robotic link inevitably has to have a contact collision with the target. The impact effect causes the vibration of the base, joints, and links of the space robot, which causes instability in the base attitude and joint, and even damage to the structure of the space robot. The collision impact and post-capturing motion control of the system are complex processes. Das et al. [
10] mainly studied the effect of collision distance before robot collision on the safe motion of robots, but did not explain the force transfer relationship during capture. Somov et al. [
11] mainly discussed the guidance and control methods of space robots when approaching non-cooperative spacecraft, but did not analyze stable control after capturing. In this study, the process of capturing the satellite is broadly divided into three stages: the pre-capturing stage of robots and the satellite, the capturing persistence stage, and the system stage after capturing. The motion analysis of the space robot and satellite in the first two stages provides theoretical support for the modeling and motion control of the system after capturing.
Many control algorithms have been proposed for the robot base attitude and joint trajectory tracking control. Wang et al. [
12] presented the terminal sliding mode control of a robot sliding perturbation observer; however, the convergence rate was not considered. Madani et al. [
13] presented a fast terminal sliding mode control without higher tracking quality for repetitive tasks. Verrelli [
14] proposed an exponentially stable repetitive learning algorithm, and Califano et al. [
15] demonstrated the repetitive control method for minimum phase nonlinear systems, which is complex and inapplicable in the aerospace field. In this study, the desired signal is a Fourier series approximated by combining the idea of repetitive control. Considering that most signals account for a large proportion of power in the middle and low frequency bands, the analytical periodic signals were finite-dimensional Fourier series, which, when combined with the exponential approach law sliding mode algorithm and finite-dimensional repetition learning algorithm, enable the design of a repetitive learning sliding mode controller applicable in the space industry. The model uncertainty and its disturbance in the structural estimation system connected parallel to the
N linear oscillators and an integrator differed from the traditional internal model-based repetitive controller [
16,
17]. The repetitive learning sliding mode controller can effectively avoid strict stability conditions and slow convergence problems with simple control law, because it is not completely dependent on model information, has high control accuracy, and is easy to realize.
The base attitude and joints of the system can reach the desired position after capturing using a repetitive learning sliding mode controller; however, in the capture operation, the collision easily leads to the vibration of the base, joints, and links of the space robot with different amplitudes. Particularly, in an undamped space environment, the attenuation is slow, and the vibration of each component may cause instability in the system after capturing. Thus, it is necessary to restrain the vibration of all flexible members of the system. Yang et al. [
18] discussed the motion control problem of ground flexible base robots and verified the effectiveness of the augmented method in the design of adaptive output feedback control. Yu et al. [
19] discussed the problem of the robust control of flexible joint space robots, and Pradhan et al. [
20] discussed the problem of the adaptive control of flexible link robots. The above studies provide a theoretical basis for the study of flexible robots; however, they only consider the influence of the single structural flexibility of the base, joint, or links. Zhang et al. [
21] considered the flexibility of the joint and introduced flexible links into the system for analysis, and Yu [
22] considered the influence of a flexible vibration of the base and joints when analyzing the motion control of a space robot. However, the above studies did not involve the capture operation. Wu et al. [
23] discussed the dynamics and control of the robot capture of tumbling satellites, Zhao et al. [
24] discussed the minimum base disturbance control of the visual servo pre-capture process of free-floating space robots, and Liu et al. [
25] studied the trajectory planning and coordinated control of space robots in the post-capture stage. Although various problems of space robot capture have been addressed, the effect of flexible vibration has not been considered.
In this study, the process of satellite capture by a fully flexible space robot is analyzed by considering the influence of the flexibility of the base, joints, and links of the space robot, and a dynamic model of the system after capturing is established. To address the problems of disordered movement, tumbling, and multiple vibration coupling in the system after capturing, this study designed a repetitive learning sliding mode controller to stabilize the base attitude and joint motion, proposed the linear quadratic optimal controller to inhibit the flexible vibration of the base and the joint, and used the hybrid trajectory method based on the virtual force concept to inhibit the vibration of the links. Three algorithms constituted the repetitive learning sliding mode stabilization controller (RSSC) to realize the stabilization control of the movement and vibration of the system. The numerical simulation shows that the proposed control scheme can suppress combination base vibration within 0.5 mm, combination joint 1 vibration within 0.05 rad, combination joint 2 vibration within 0.05 rad, combination B1 link first mode within 0.05 mm, combination B1 link second mode within 0.05 mm, combination B2 link first mode within 0.2 mm, and combination B2 link second mode within 0.02 mm. At the same time, the controller can make the system move according to the desired trajectory within 10 s.
The paper is organized as follows: In
Section 2, the kinematic relationships of the flexible space robot and satellite are established. In
Section 3, the dynamic models of the flexible space robot and satellite are established. On this basis, the dynamic model of the system is established. In
Section 4, the system is decomposed into slow and fast subsystems by using the singular perturbation method. In
Section 5, a repetitive learning sliding mode stabilization control is proposed to achieve the stabilization control of motion vibration. In
Section 6, numerical simulations are carried out to validate the control strategy. Finally, the conclusions are given in
Section 7.
2. System Kinematics Analysis
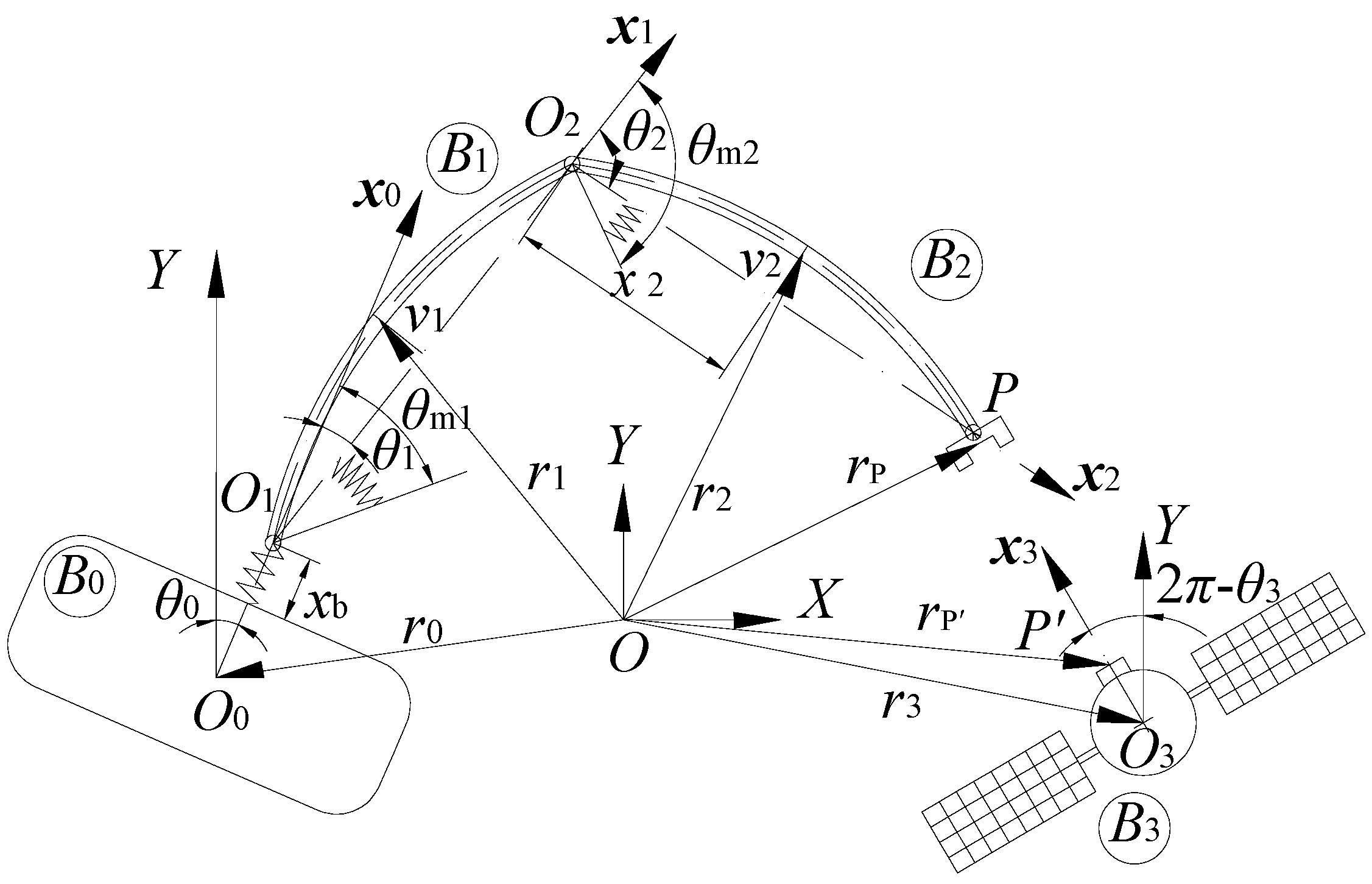
The structure of the flexible-base flexible-link and flexible-joint space robot and the satellite are shown in
Figure 1. The space robot comprises a base
, a flexible link
near the base, and a flexible link
away from the base. The center of mass of the base is
, the center of the hinge connecting the base and link
is
, the center of the hinge connecting link
and
is
, and the center of mass of the captured satellite is
.
is the inertial coordinate system, and
is the local coordinate system of
.
is the attitude angle of the base, and
is the rotation angle of link
.
and
are the rotor angles of the motor, and
is the attitude angle of the satellite.
P and
P’ are the capture points of the space robot end effector and satellite, respectively.
,
,
and
represent the position vectors of the mass center of the base, the capture point of the space robot end effector, the captured point of the satellite and the mass center of the satellite in the inertial coordinate system, respectively.
is the position vector of any point on link
in the inertial coordinate system. Let
be any distance in the symmetry axis direction of the link
, and let
be the elastic deformation of link
at time
t.
According to the hypothesis of Spong [
26], the flexible base and joint are assumed to be a massless linear telescopic spring and linear torsion spring, respectively. The flexible links are equivalent to the Euler Bernoulli simply supported beam. The elastic coefficients of the base, joints and bending rigidity of the links are fixed, which are expressed as
,
and
, respectively. The deformation of link
is
, where
and
represent the
kth-order modal function and coordinates of link
, respectively, and
is the number of reserved modes (
in the paper).
The captured satellite is assumed to be a single rigid body system. According to the geometric position relationship of the system, the position vectors
,
,
,
,
and
are:
where
are the base centroid coordinate,
is the distance between the rotation centers
and
,
is the base flexible deformation,
are the satellite centroid coordinate,
is the distance between the rotation centers
and
,
,
,
and
are base vectors.
Taking the differentiation of Equation (1) with respected to time
t leads to:
According to the 4th and 6th equations of Equation (2), the kinematic expressions of the space robot and satellite are as follows:
where
,
, and
is the Jacobian matrix of the flexible space robot.
,
,
,
, and . is the Jacobian matrix of the satellite. and , .
6. Simulation Results
Taking the process of a satellite captured by a flexible-base, flexible-link and flexible-joint space robot as an example, as shown in
Figure 1, and
as the initial time, the simulation studies are carried out. The physical parameters of the flexible-base, flexible-link and flexible-joint space robot system and satellite are:
and
. The mass, moment of inertia, and linear density of the flexible link are selected as
,
,
,
,
, and
. The bending stiffness of the flexible link and the elastic coefficients of the base and joints are selected as
,
, and
. Before collision, the space robot is in a static waiting state, and its initial state is
. The satellite flies to the robot end effector with a movement speed of
,
and roll speed
. The collision occurs at time
, lasts for a very short time
, and is tightly locked after time
to form a system. Then, the controller is turned on to stabilize the base attitude and joints of the system in the following expected states:
In order to compare and illustrate the stabilization control effect of the designed controller for the unstable system, this study carries out simulation analysis in two cases.
(1) After contact and collision, the motion control of the system is carried out without vibration suppression, that is, turning off the fast sub-controller and virtual control force. The repetitive learning sliding mode control without vibration suppression (RSC-NV) is composed of Equations (17) and (28)–(30). RSC-NV simulation is used to reveal the impact of collision on the vibration and motion of the base, joint and links of the space robot.
(2) After contact and collision, the stabilization control of the motion and vibration of the system is carried out, that is, turning on the fast sub-controller and virtual control force. The repetitive learning sliding mode stabilization control (RSSC) is composed of Equations (17), (37)–(39), (41) and (43). RSSC is used for simulation, to verify the effectiveness of the system stabilization control.
The relevant parameters of the controller are selected as , , , , , , , , , , , and .
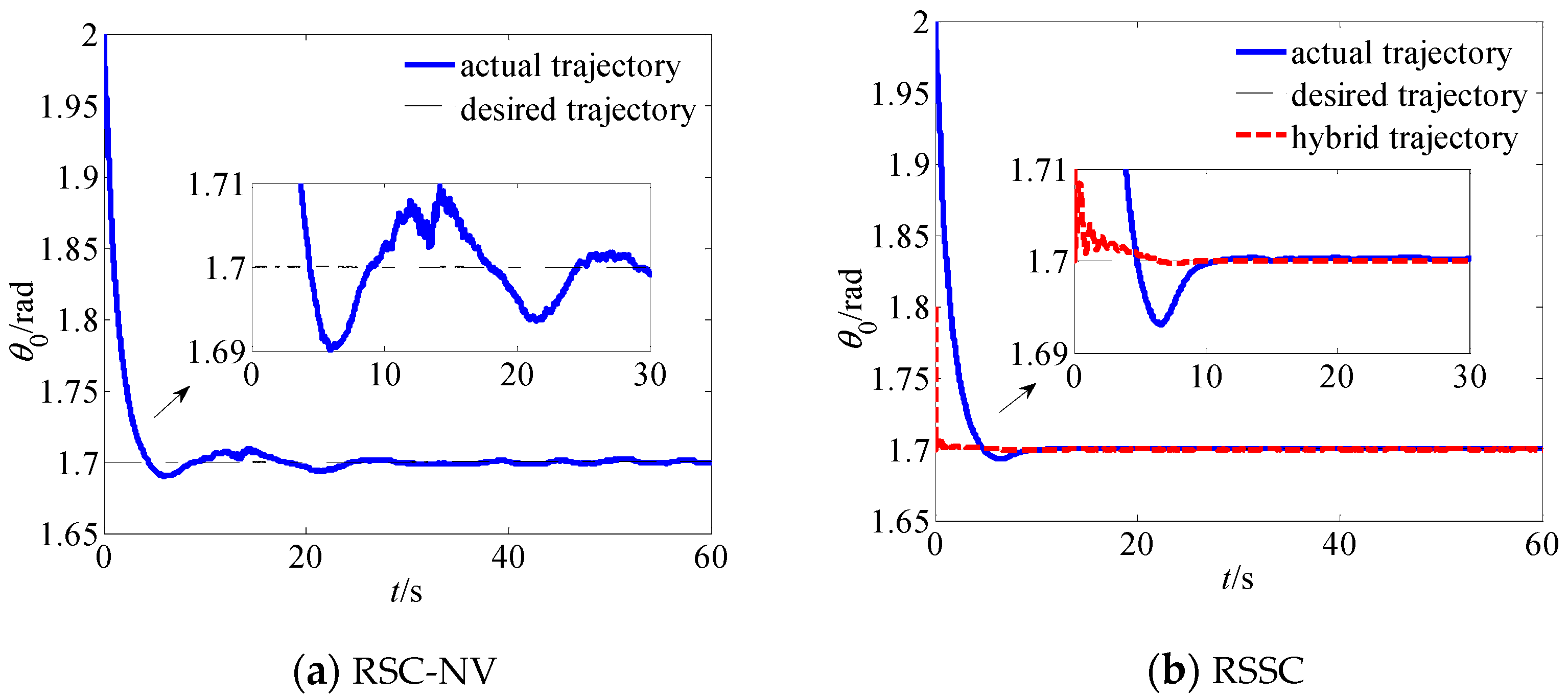
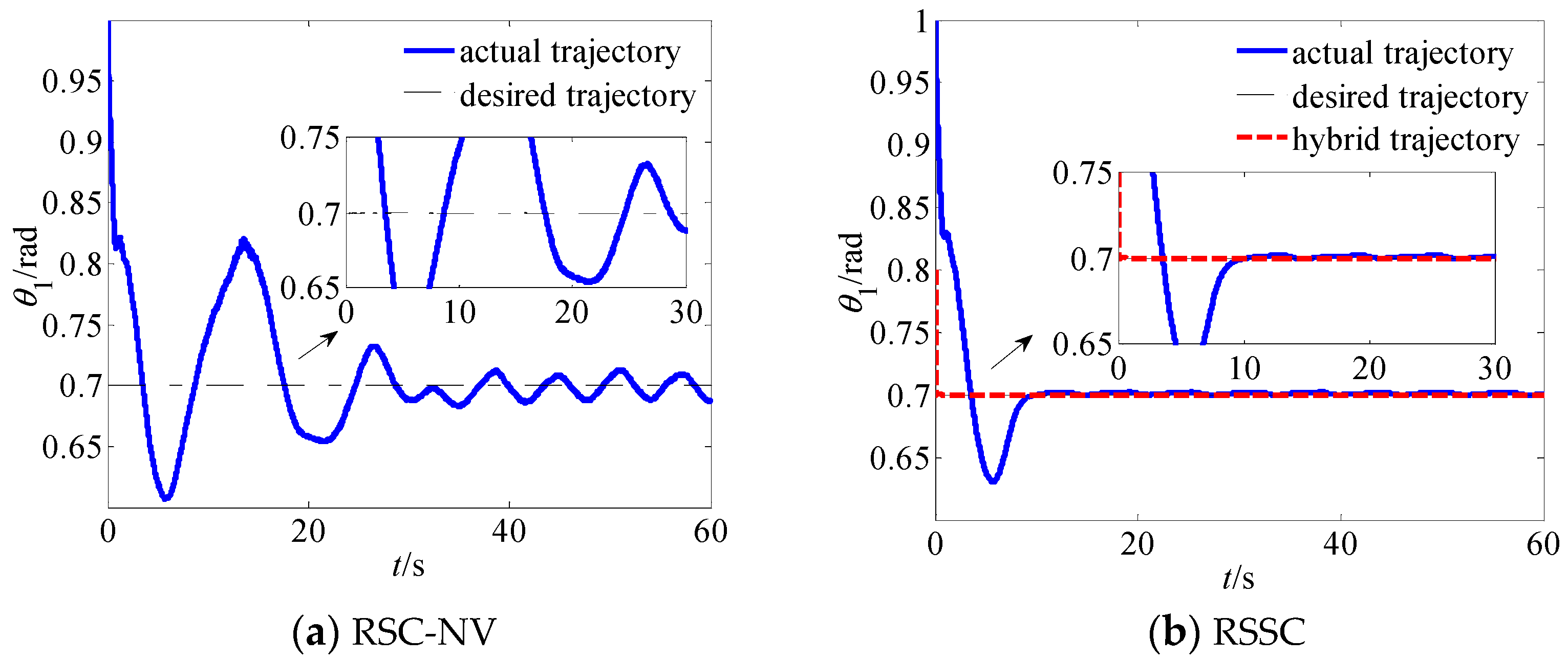
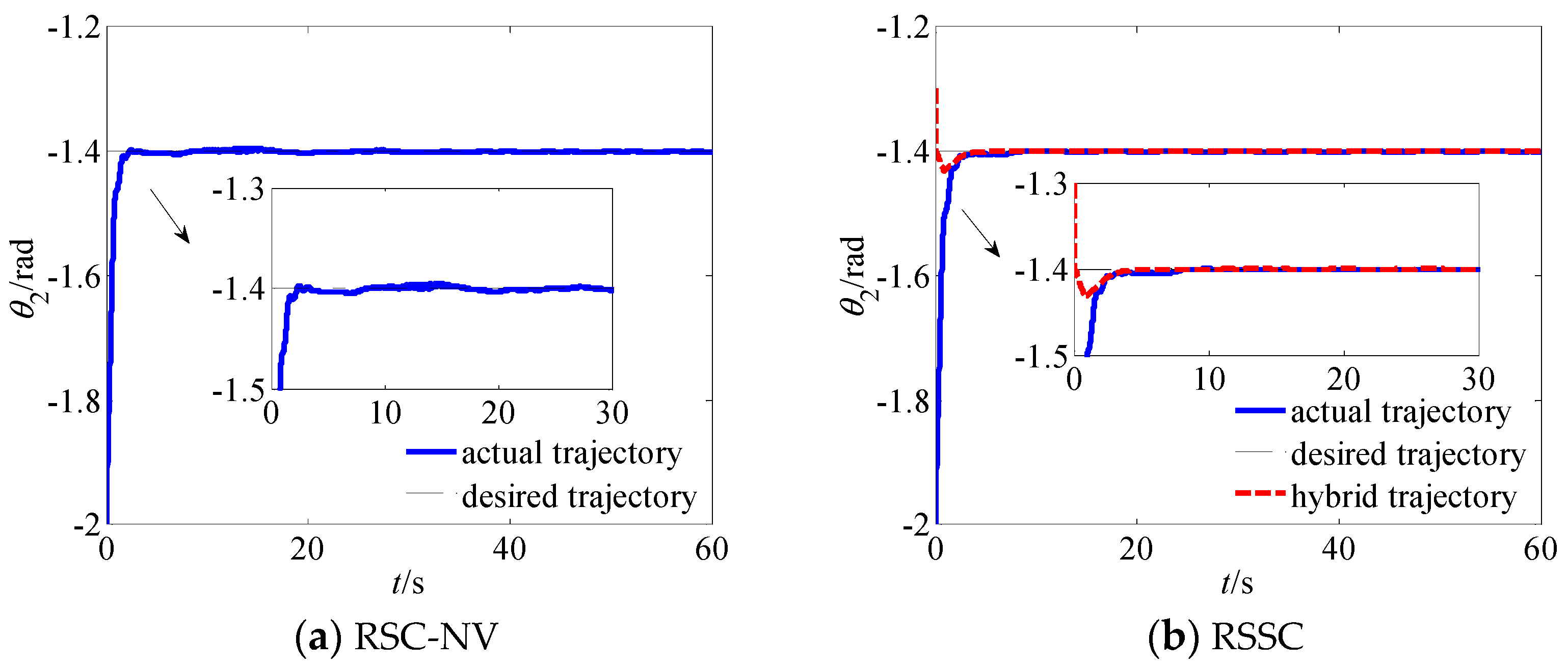
The trajectory tracking curves of the system base attitude under two control algorithms shown in
Figure 2,
Figure 3 and
Figure 4 are the trajectory tracking curves of the system joint
and joint
under two control algorithms.
From
Figure 2,
Figure 3 and
Figure 4, we can observe that the RSC-NV algorithm makes the base attitude and joint of the system stable in the desired trajectories. However, owing to the mutual coupling of the system motion and vibration, the uninhibited vibration of the base, links, and joints will lead to different amplitude vibrations of the base attitude and joint of the system, which will affect the control accuracy. Under the RSSC control algorithm, it can be seen that the convergence time of the base attitude stabilization and the tracking control of the joints is within 10 s. However, the convergence time under the RSC-NV algorithm is more than 30 s. The RSSC algorithm has a faster convergence speed than the RSC-NV algorithm. Therefore, the system has better control performance under the RSSC algorithm than the RSC-NV control method.
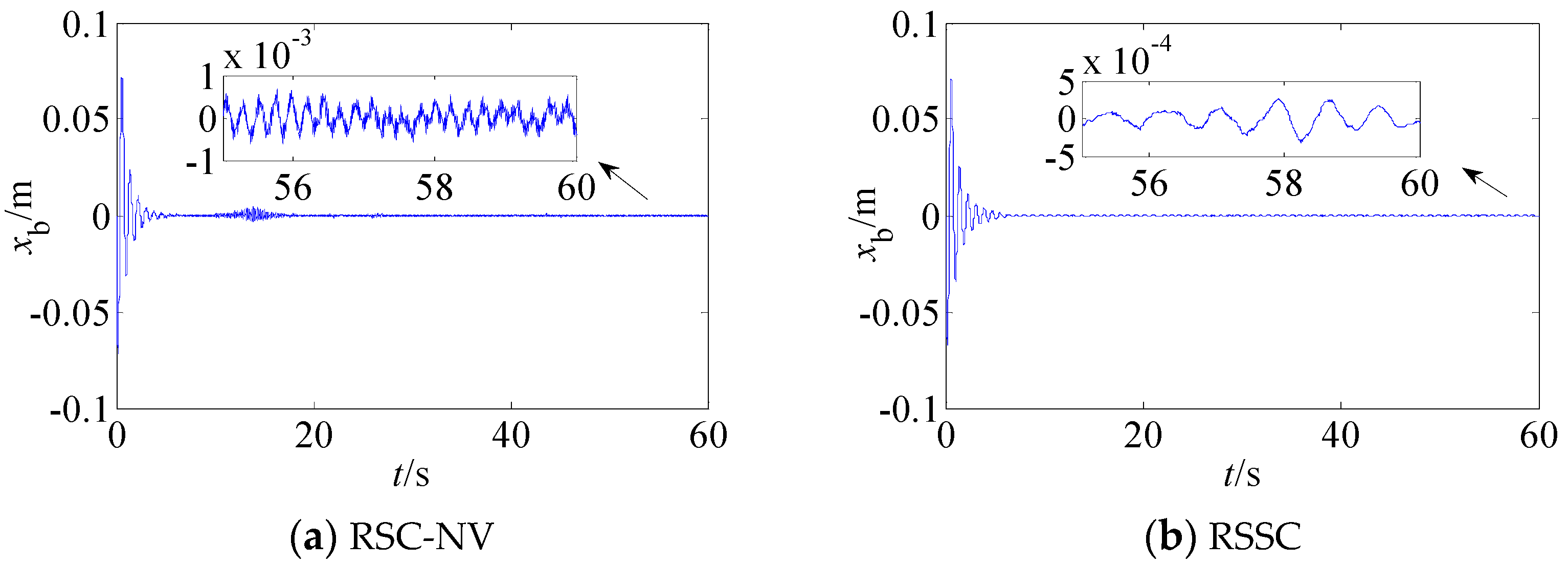
In order to show the effectiveness of the proposed algorithm for base and joint vibration suppression, the following simulation is carried out. Among them,
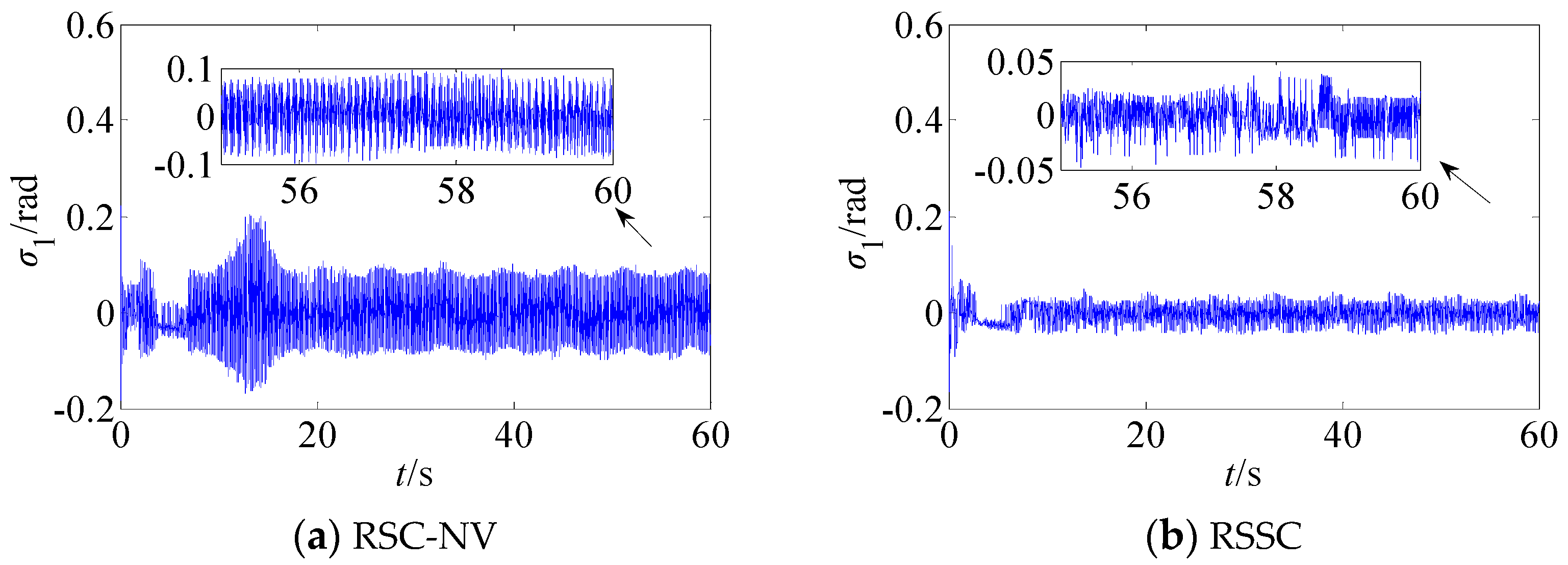
Figure 5 shows the elastic vibration curves of the system base of under two control conditions, and
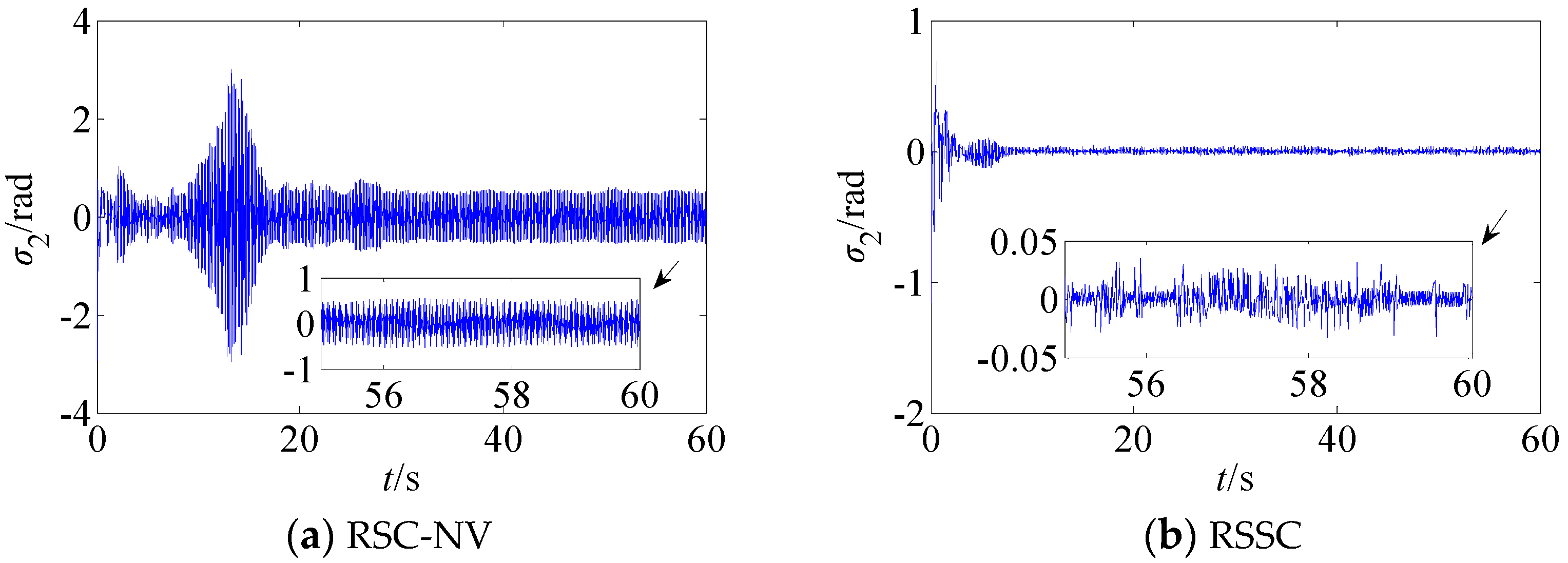
Figure 6 and
Figure 7 show the elastic vibration curves of joint
and joint
of the system under two control conditions.
From
Figure 5, one can observe that the amplitude of the base is 1 mm under the RSC-NV algorithm. However, it can be seen that the base amplitude is 0.5 mm under the RSSC algorithm. The amplitude of joint
is 0.1 rad under the RSC-NV algorithm, and the amplitude of joint
is 0.05 rad under the RSSC algorithm, as show in
Figure 6.
Figure 7 shows that the amplitude of joint
is 1 rad under the RSC-NV algorithm, the amplitude of joint
is 0.05 rad under the RSSC algorithm. It is proved that the RSSC algorithm is effective at suppressing the vibration of the base and joints of the disturbed system.
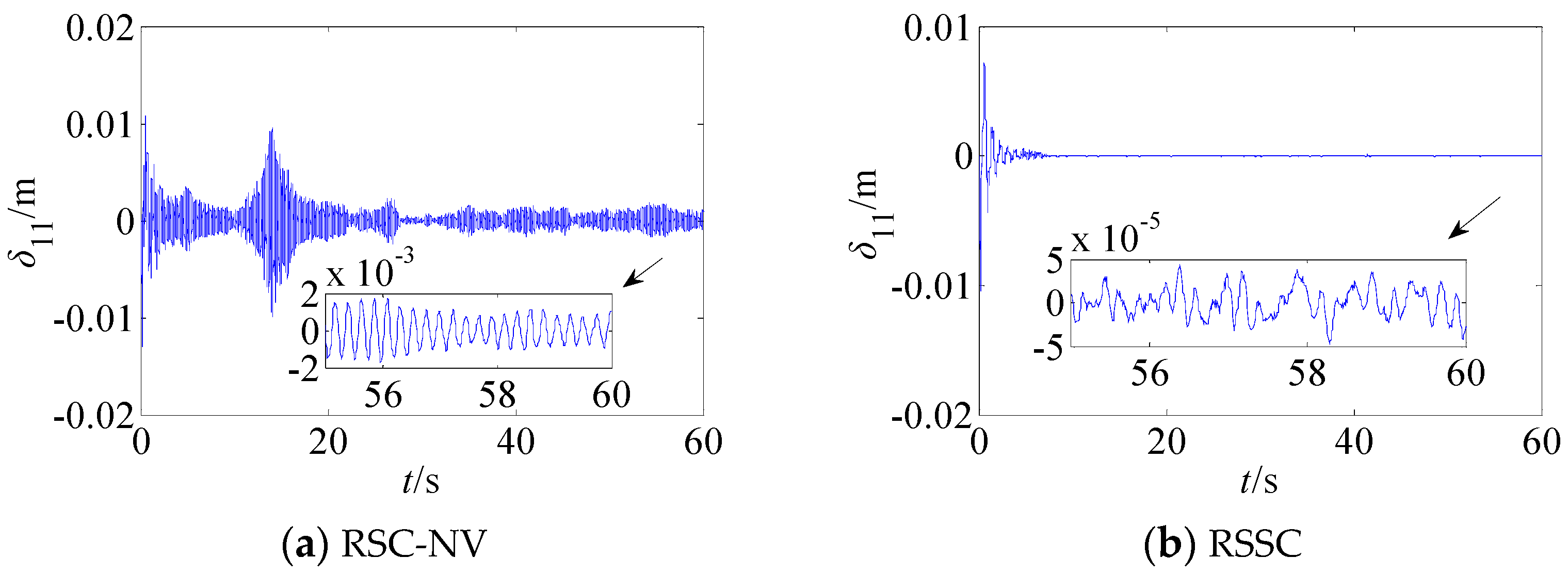
At the same time, the influence of the links vibration cannot be ignored.
Figure 8 and
Figure 9 show the first and second modal coordinates of flexible link
, respectively.
Figure 10 and
Figure 11 show the first and second modal coordinates of flexible link
.
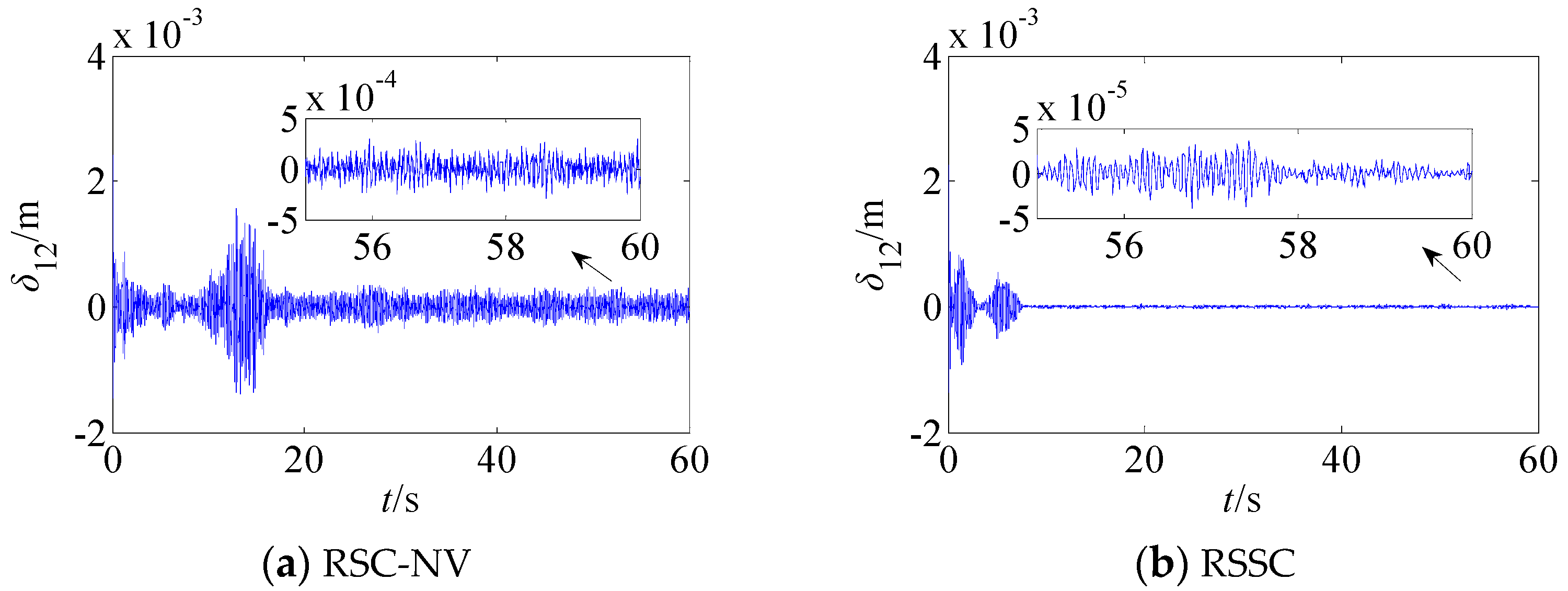
The first mode coordinates of the flexible link
are 2 mm under the RSC-NV algorithm, and they are 0.05 mm under the RSSC algorithm, as depicted in
Figure 8.
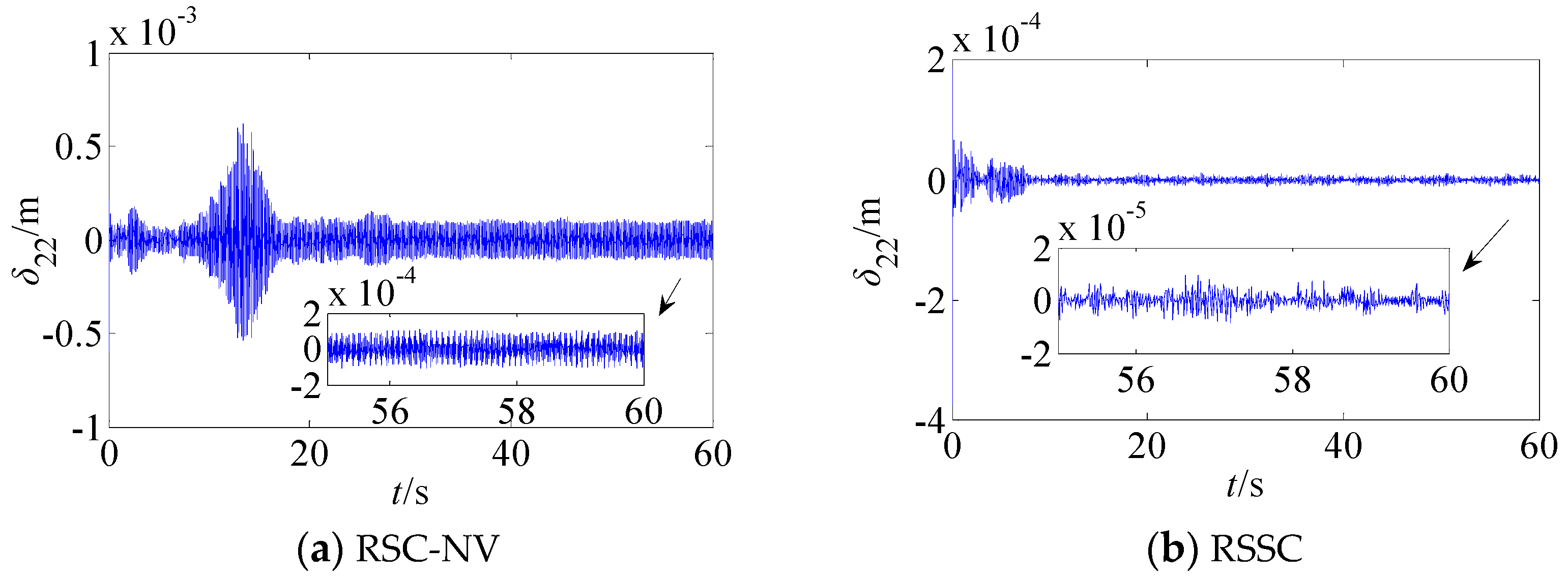
Figure 9 shows that the second mode coordinates of the flexible link
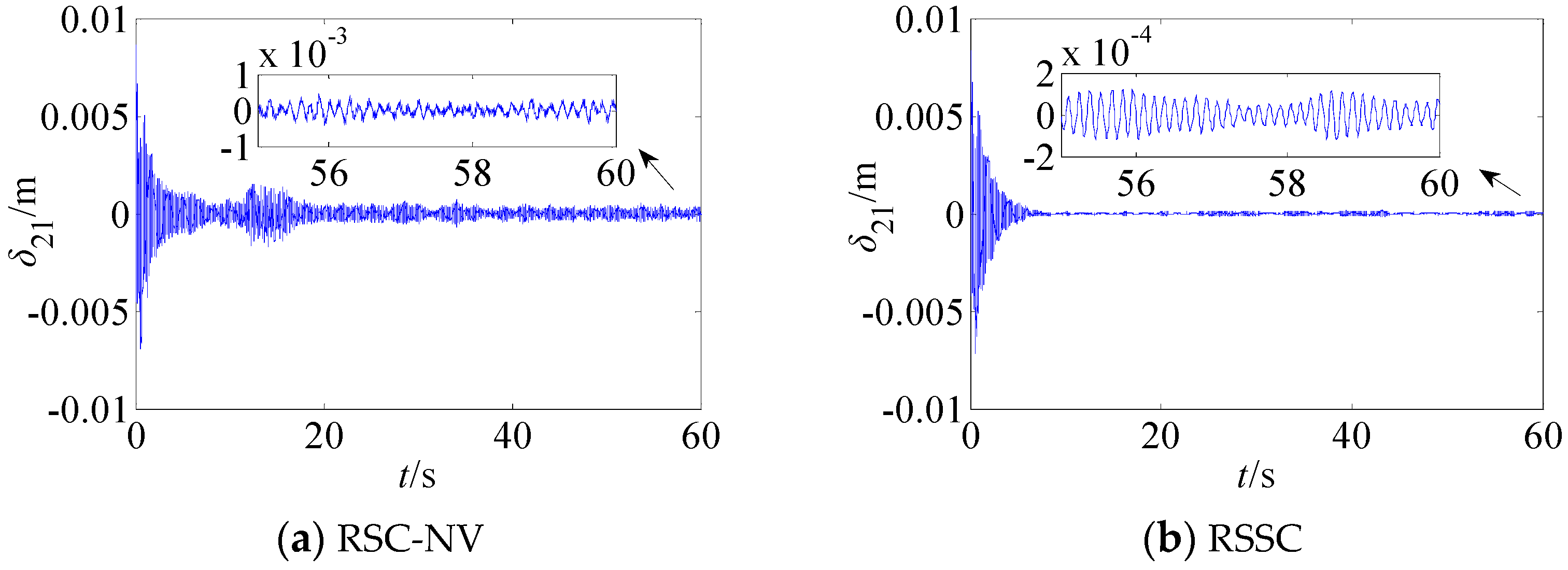
are 0.5 mm under the RSC-NV algorithm, and they are 0.05 mm under the RSSC algorithm. Meanwhile, from
Figure 10, one can see that the first mode coordinates of the flexible link
is 1 mm under the RSC-NV algorithm, and it is 0.2 mm under the RSSC algorithm.
Figure 11 shows that the second mode coordinates of the flexible link
is 0.2 mm under the RSC-NV algorithm, and it is 0.02 mm under the RSSC algorithm. All of the mode coordinates are obviously suppressed under the RSSC, which illustrates the effectiveness of the control schemes in the vibration suppression of system links.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










