
Experimental and Computational Aeroacoustic Investigation of Small Rotor Interactions in Hover

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background
2.1. The Dependence on Rotor Materials and Manufacturing
2.2. The Impact of Recirculation
2.3. The Difficulties of Acoustic Predictions
2.4. The Significance of Rotor Interactions
3. Materials and Methods
3.1. Rotor Configuration
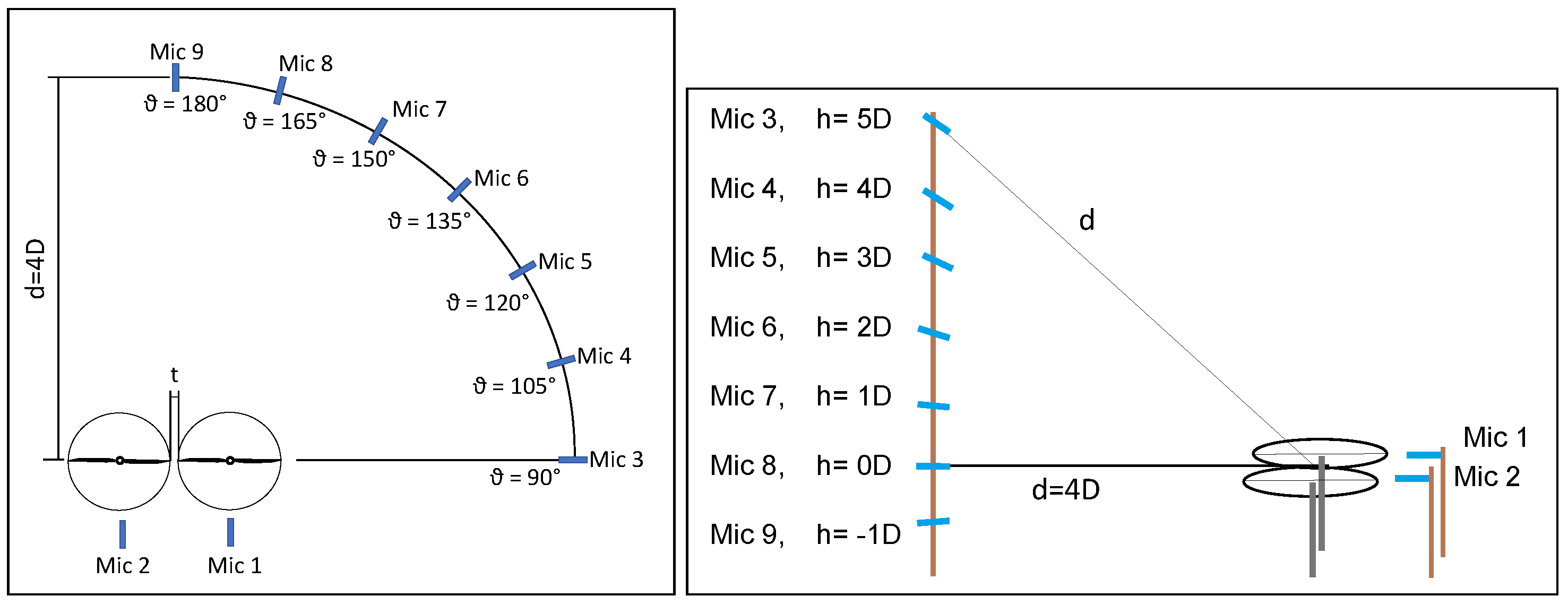
3.2. Experimental Setup
3.3. Computational Methodology
3.3.1. CREATE-AV Helios
3.3.2. PSU-WOPWOP
3.3.3. UCD-Quietfly
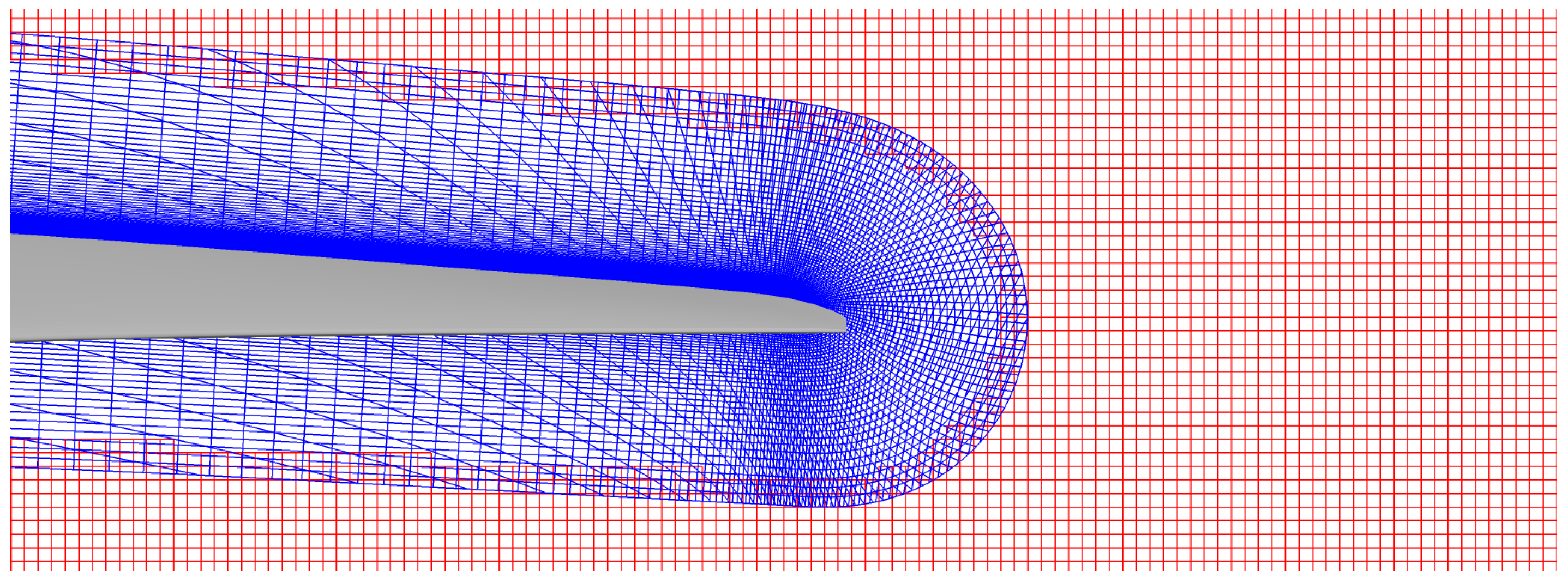
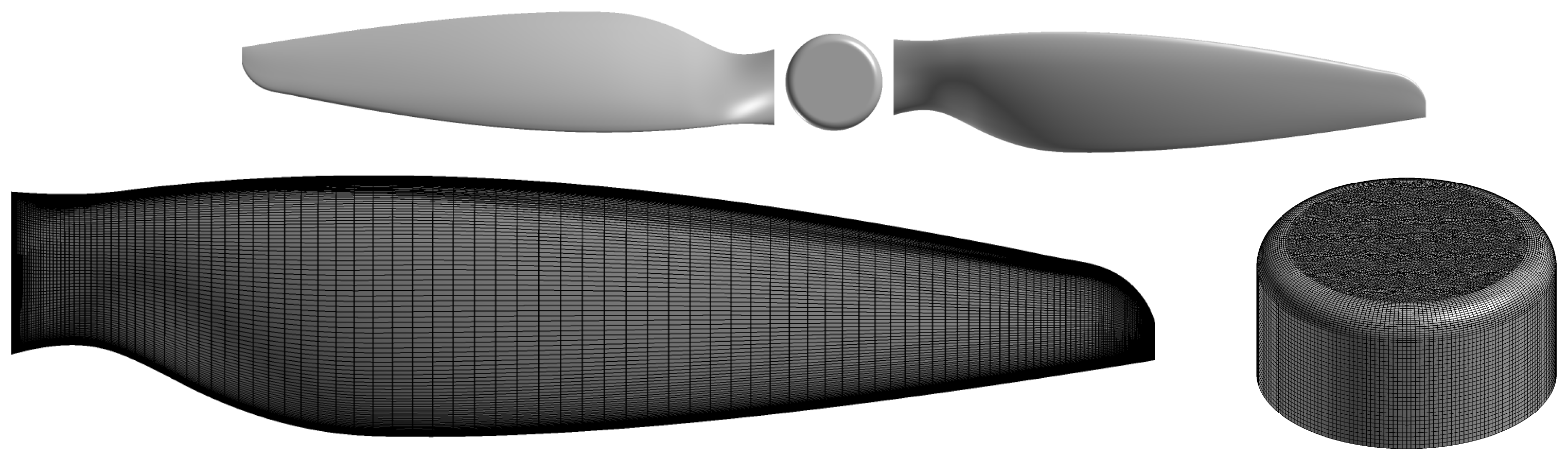
3.3.4. Rotor Geometry and Mesh
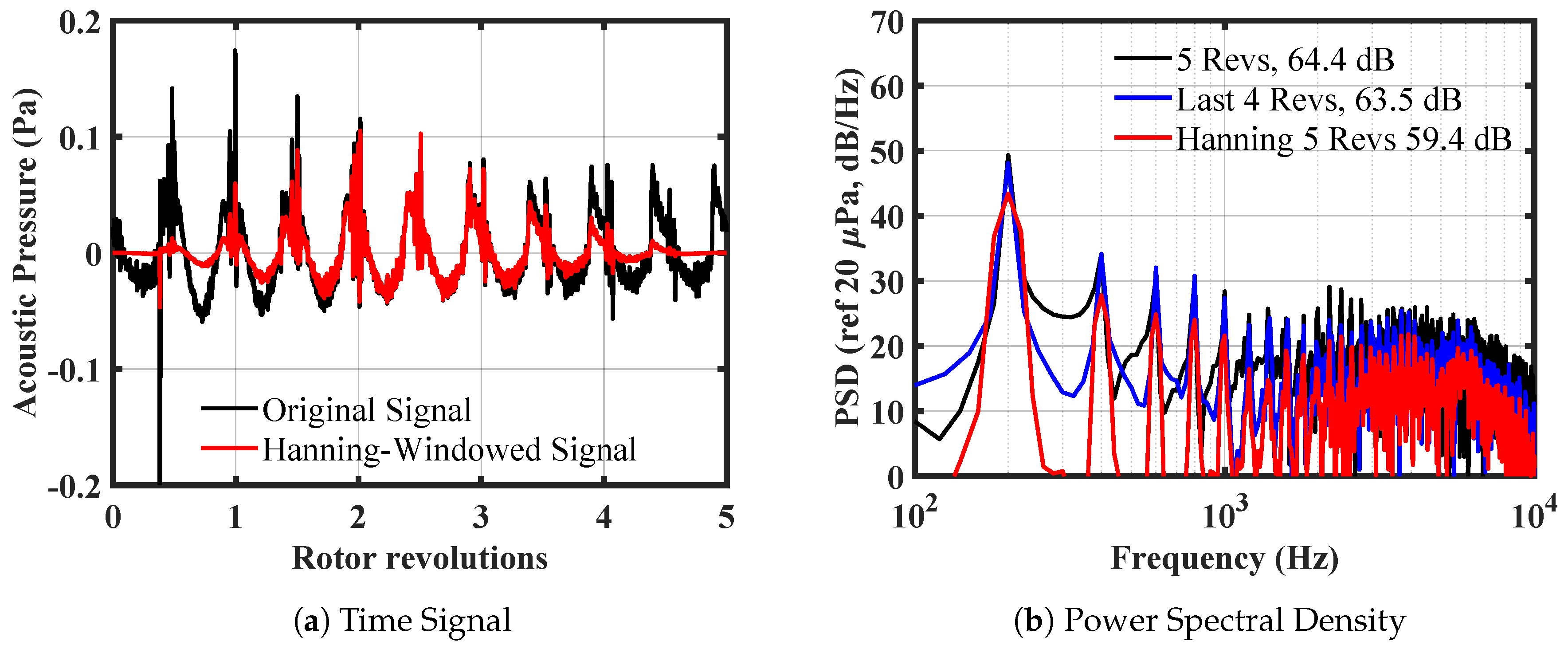
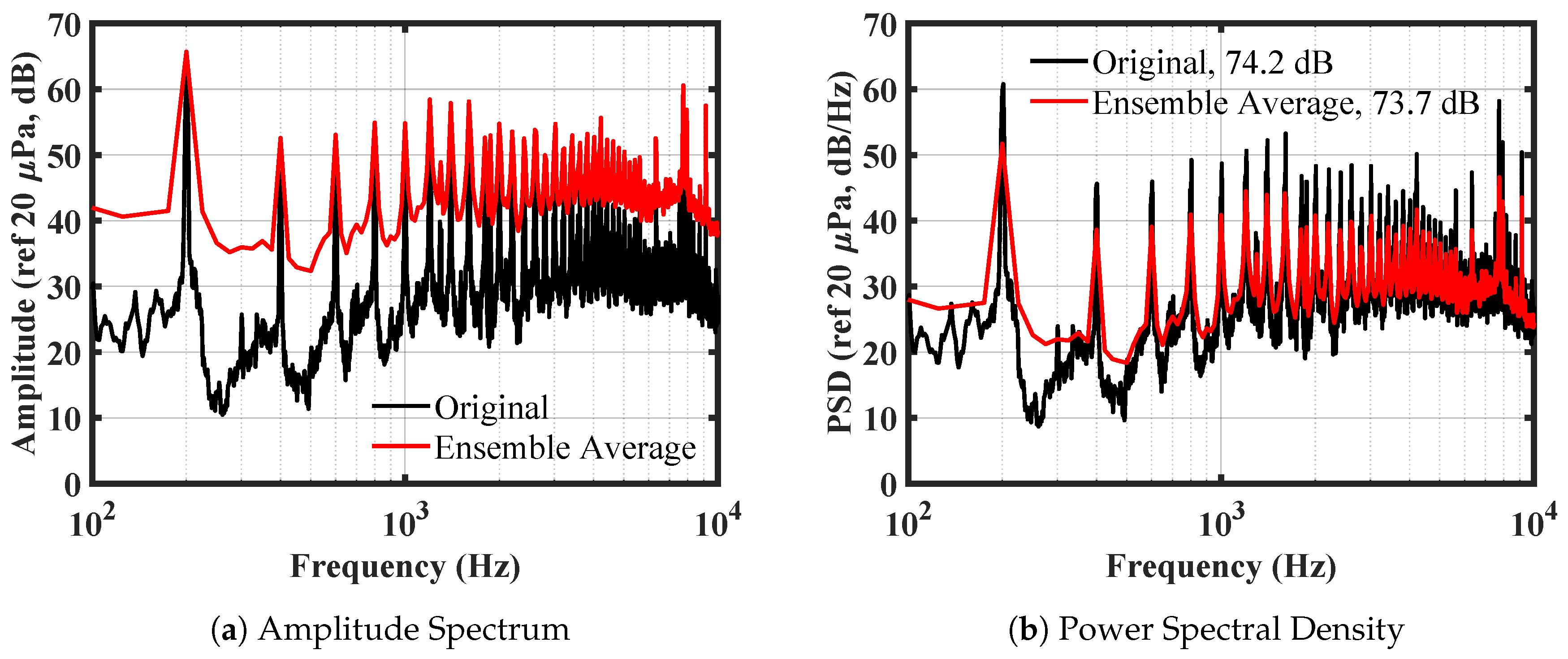
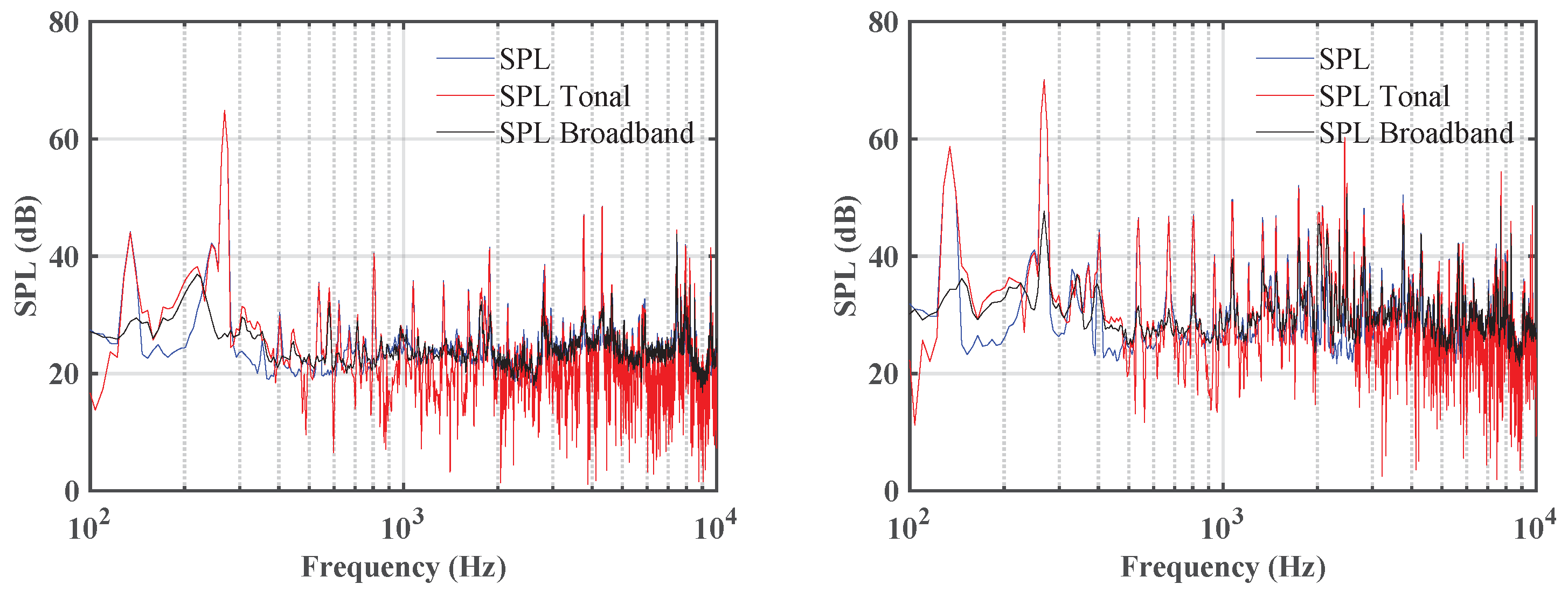
3.4. Processing of the Acoustic Signals
4. Results
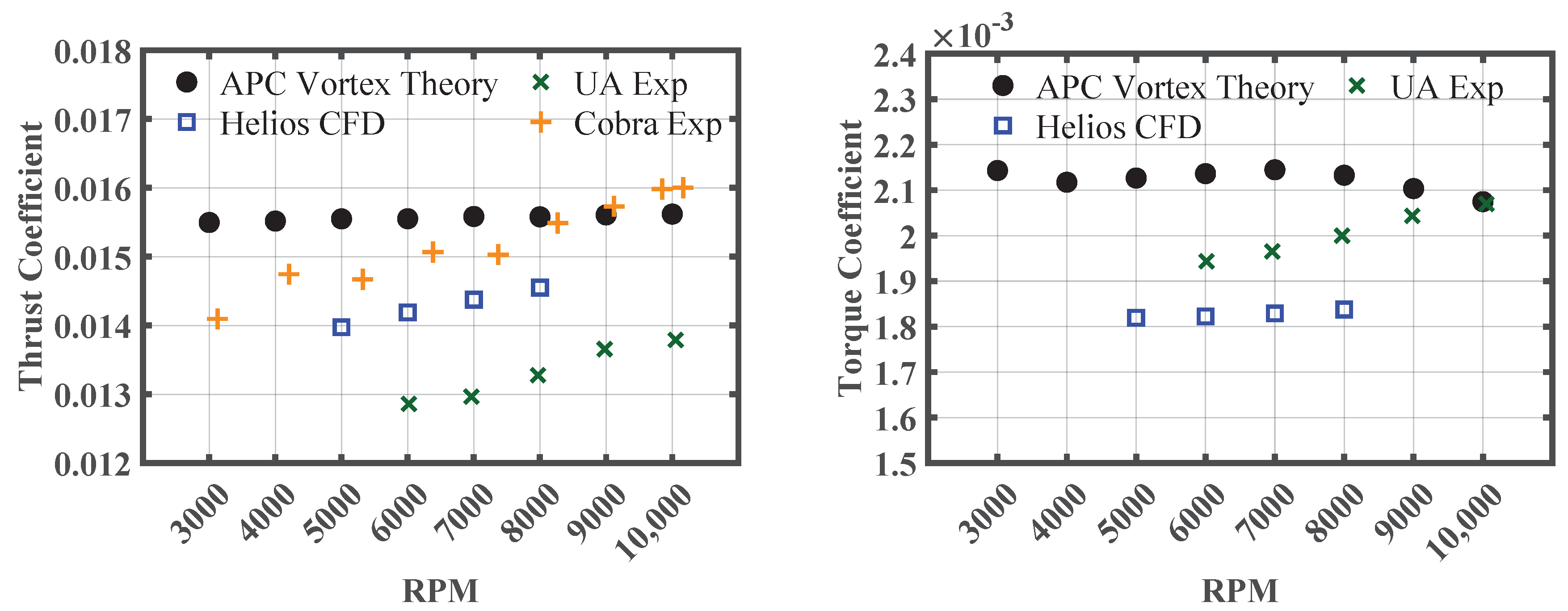
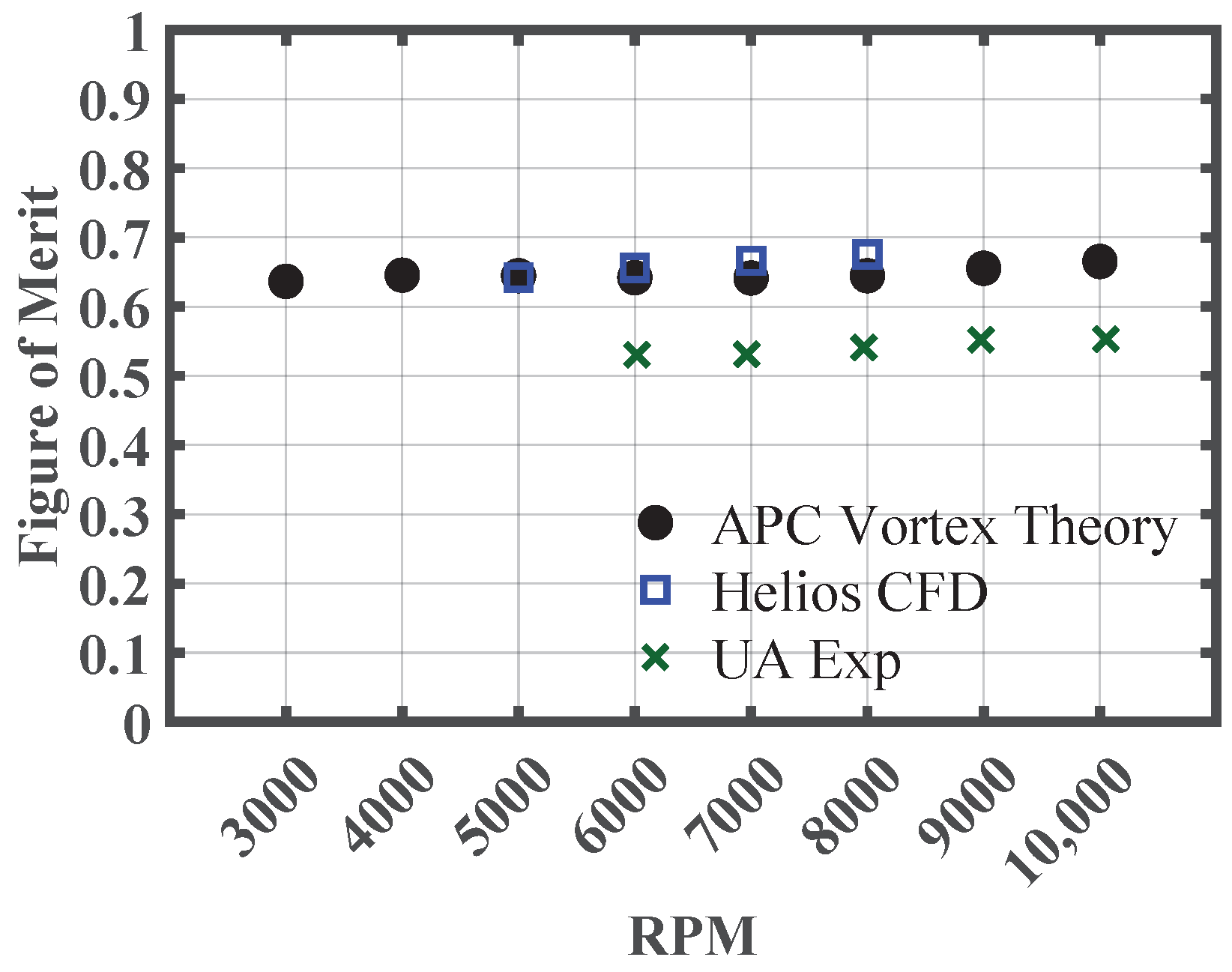
4.1. Performance Measurements and Predictions
4.1.1. Isolated Rotor
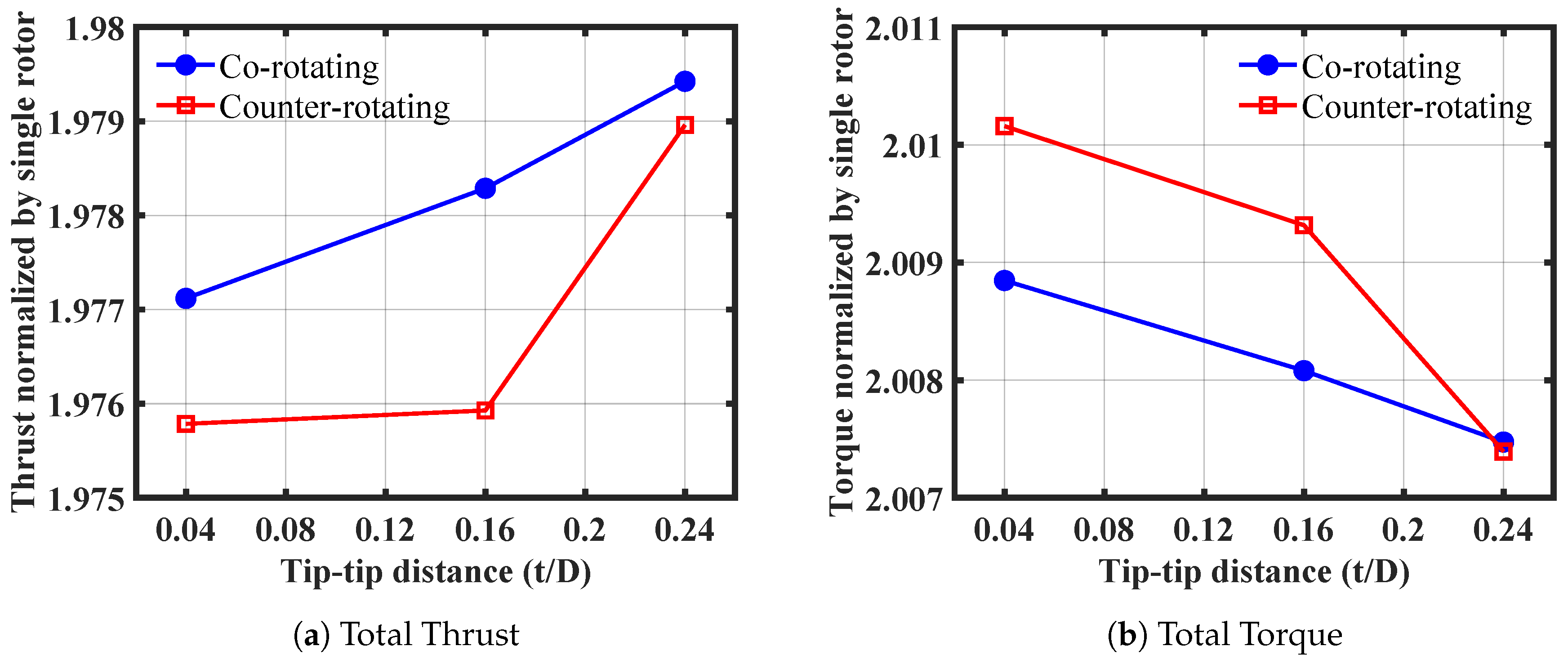
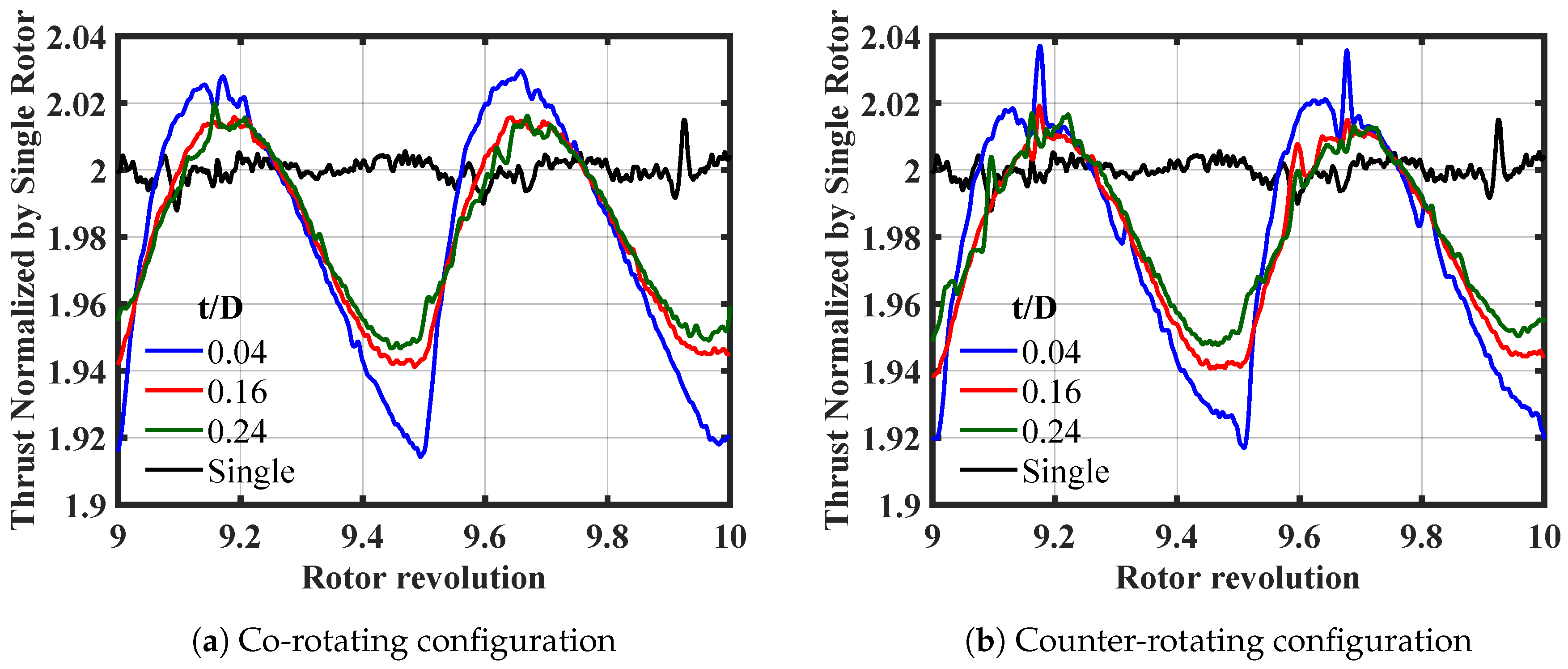
4.1.2. Dual Rotor
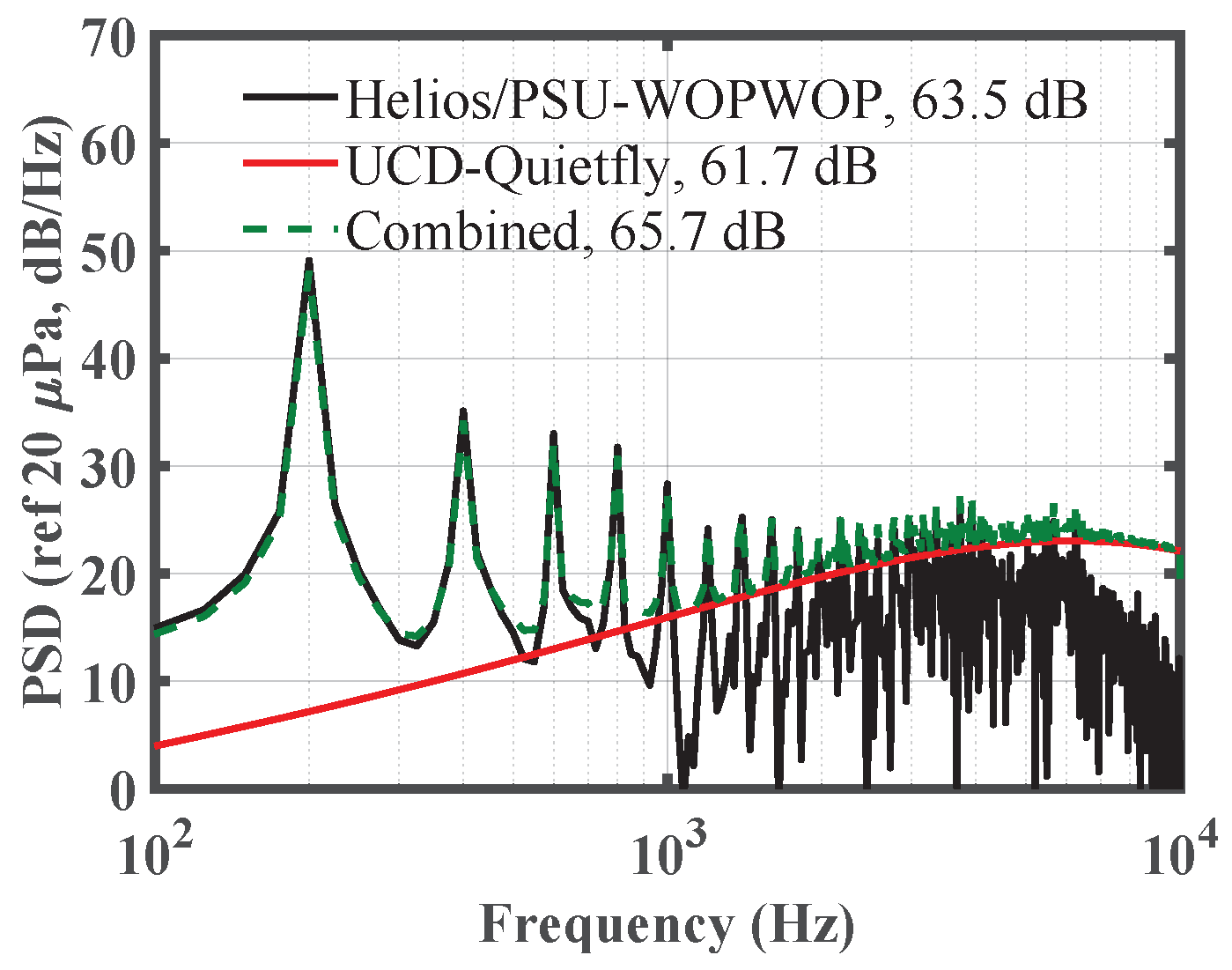
4.2. Aeroacoustics Measurements and Predictions
4.2.1. Isolated Rotor Noise Sources
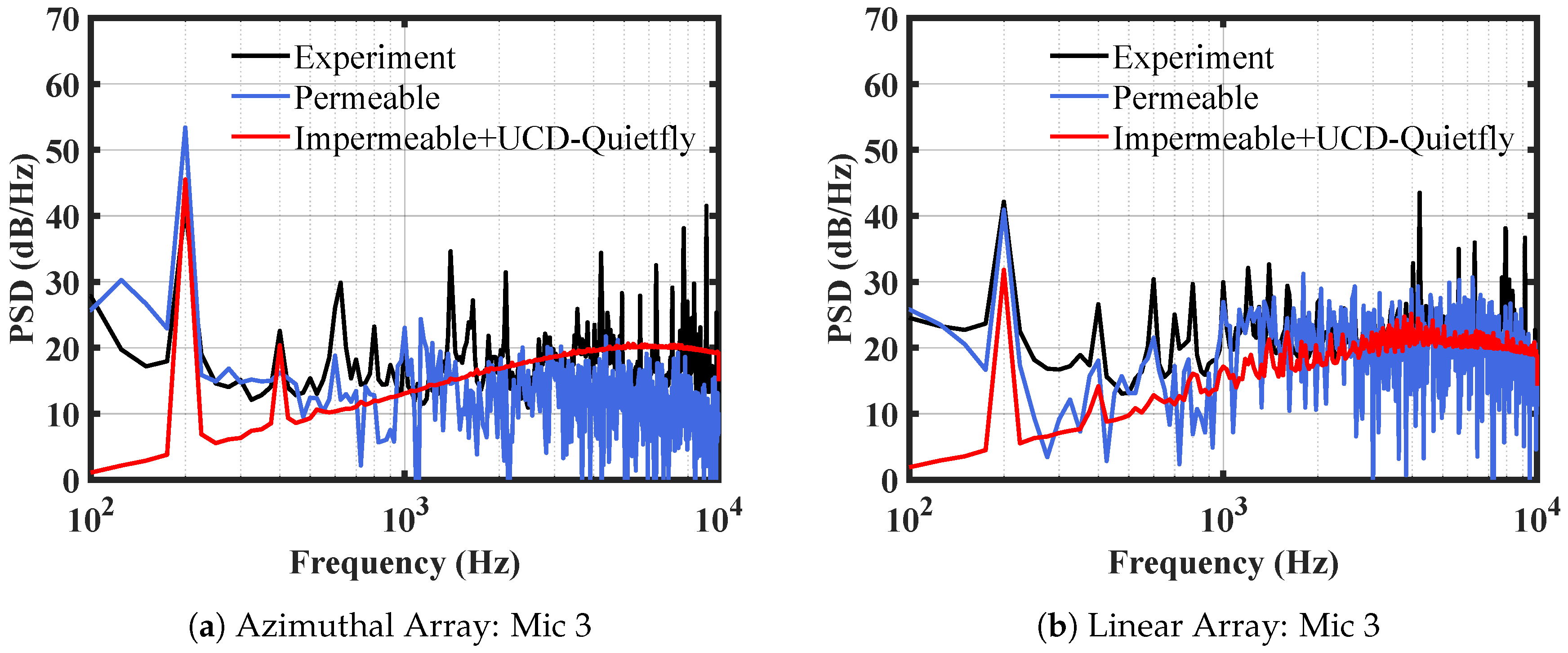
4.2.2. Choice of Integration Surface
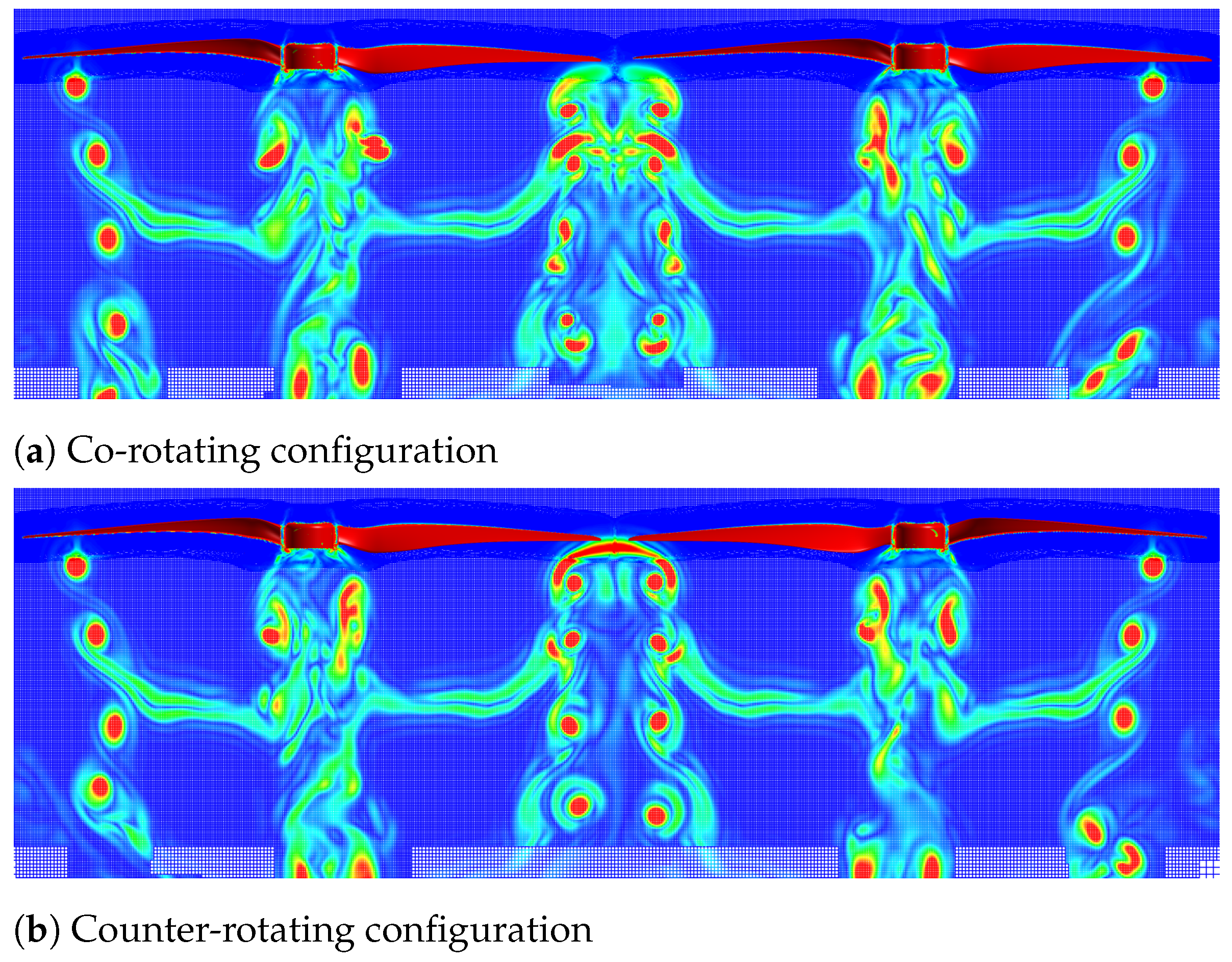
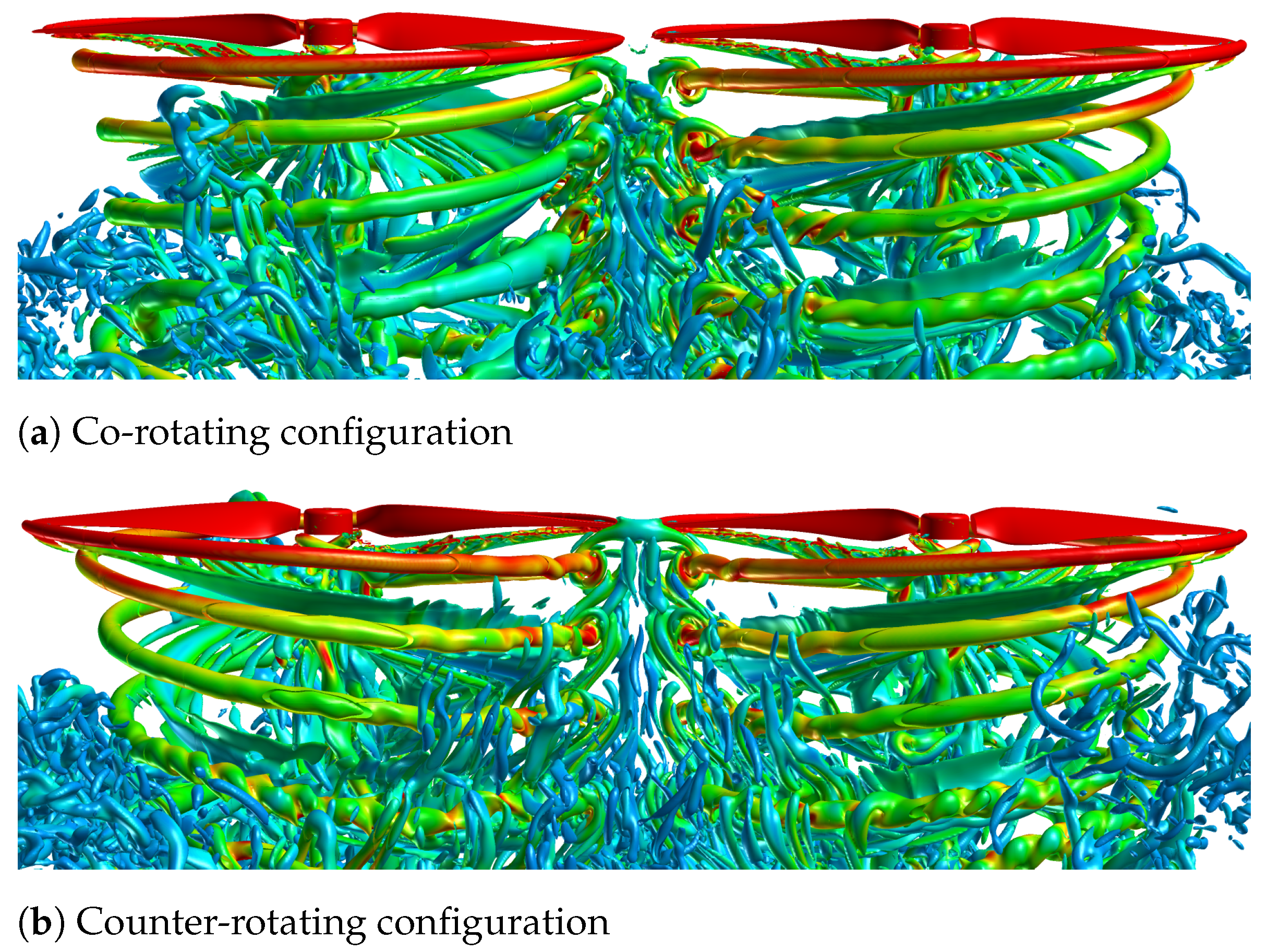
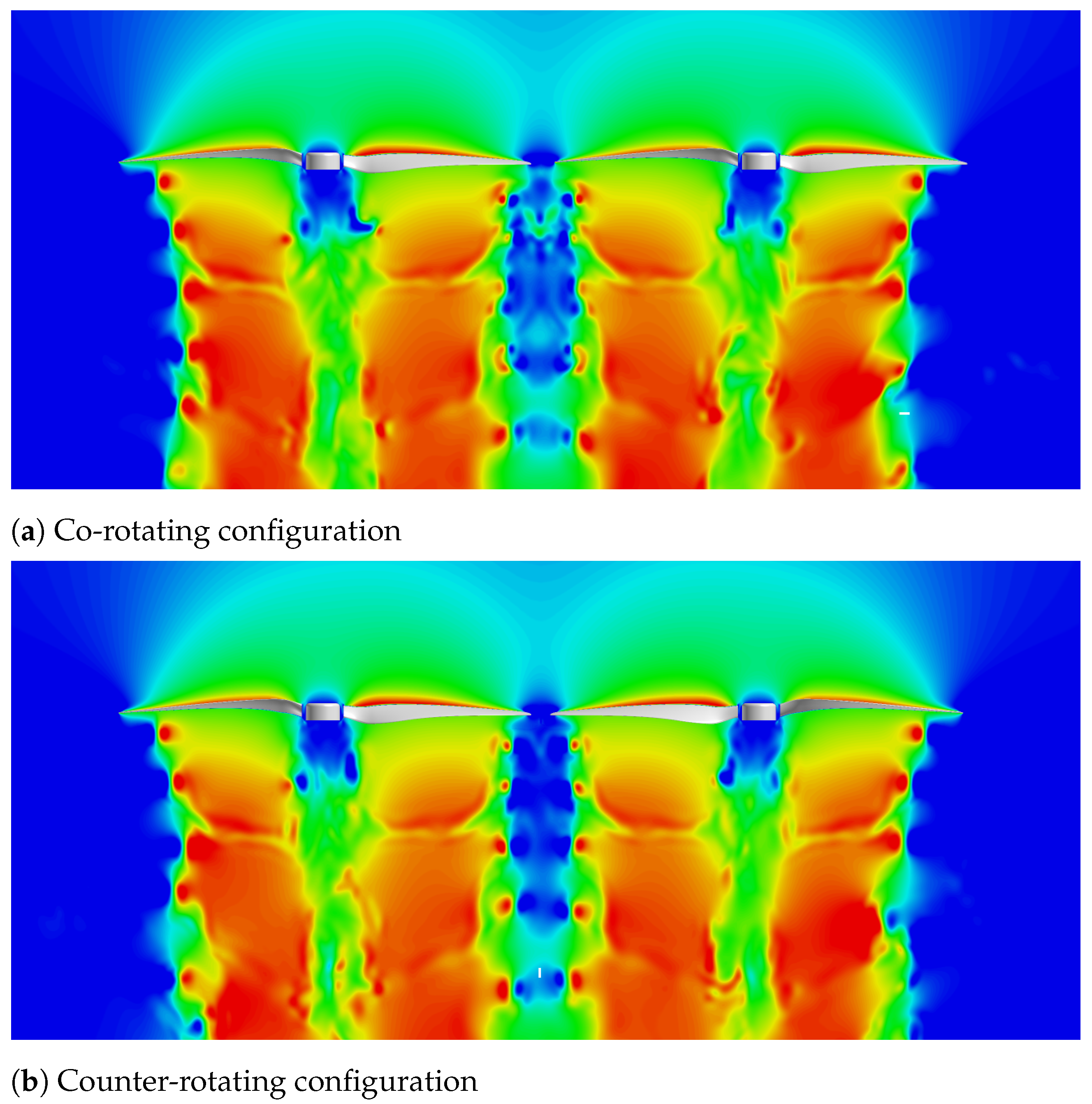
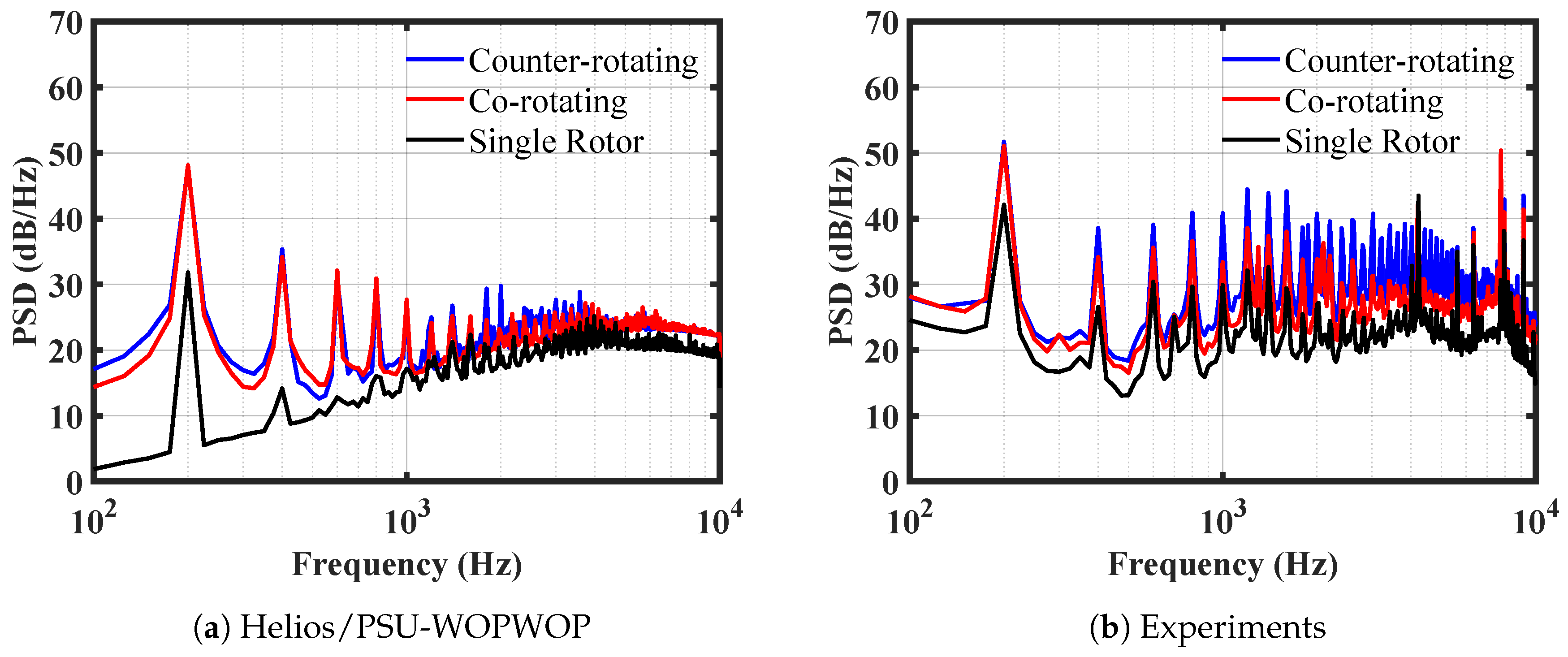
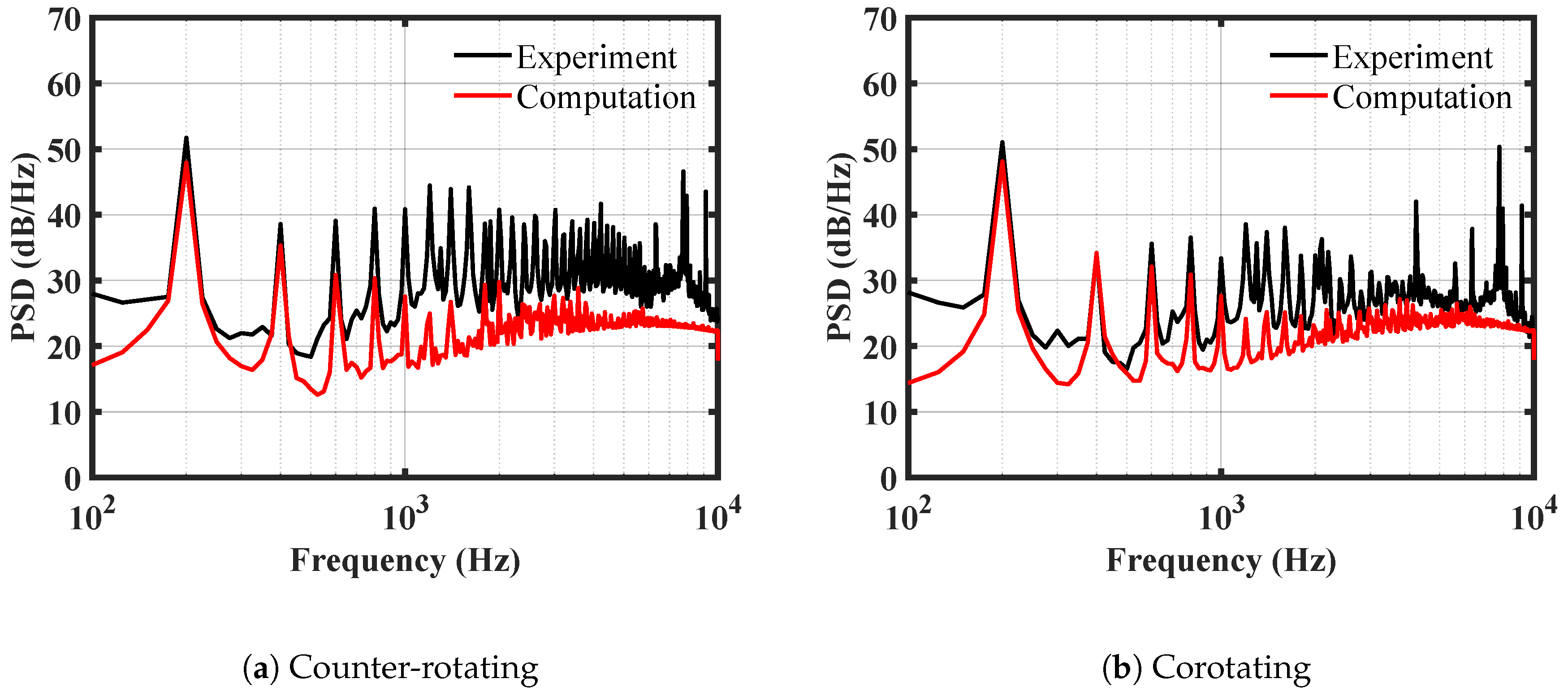
4.2.3. Dual Rotor Interactions
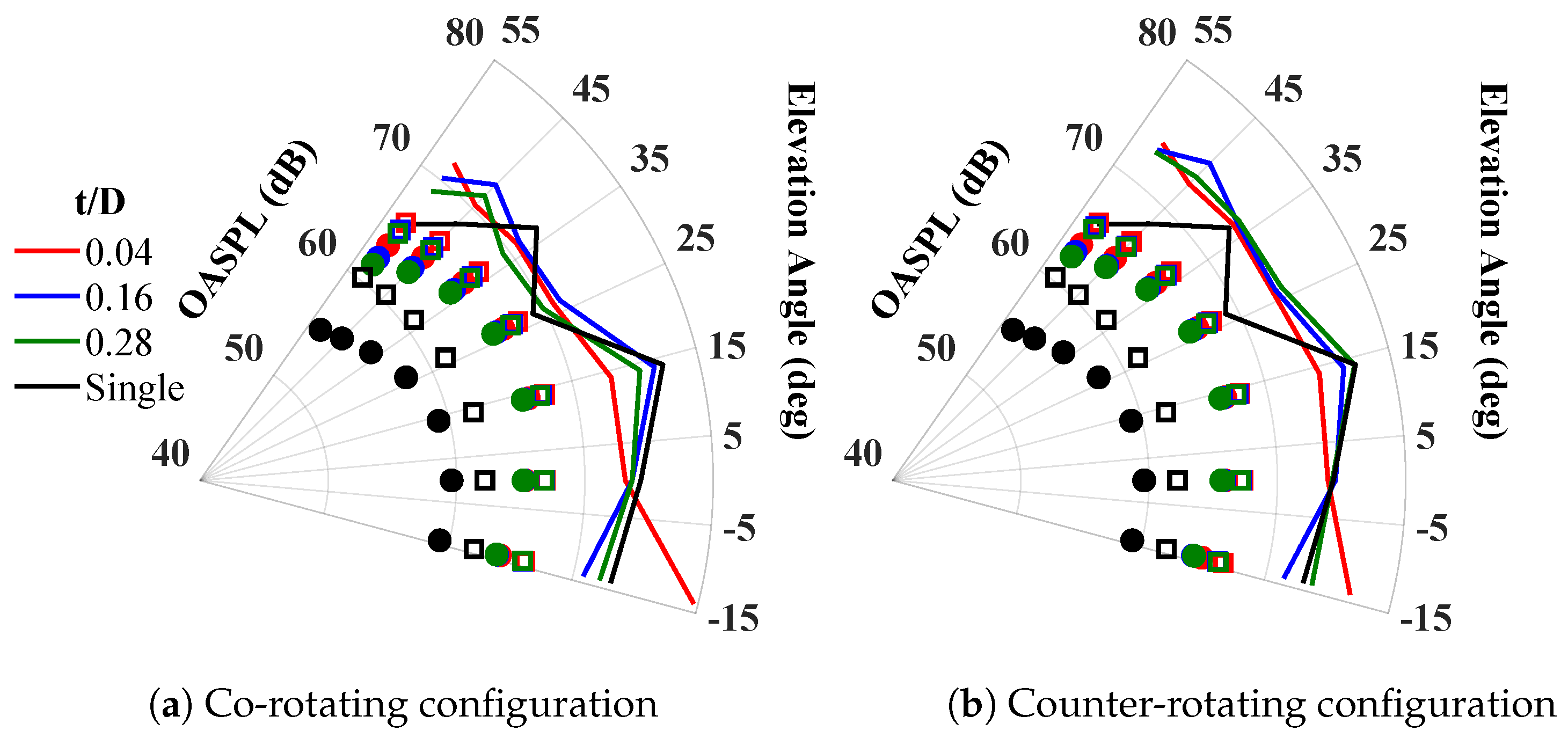
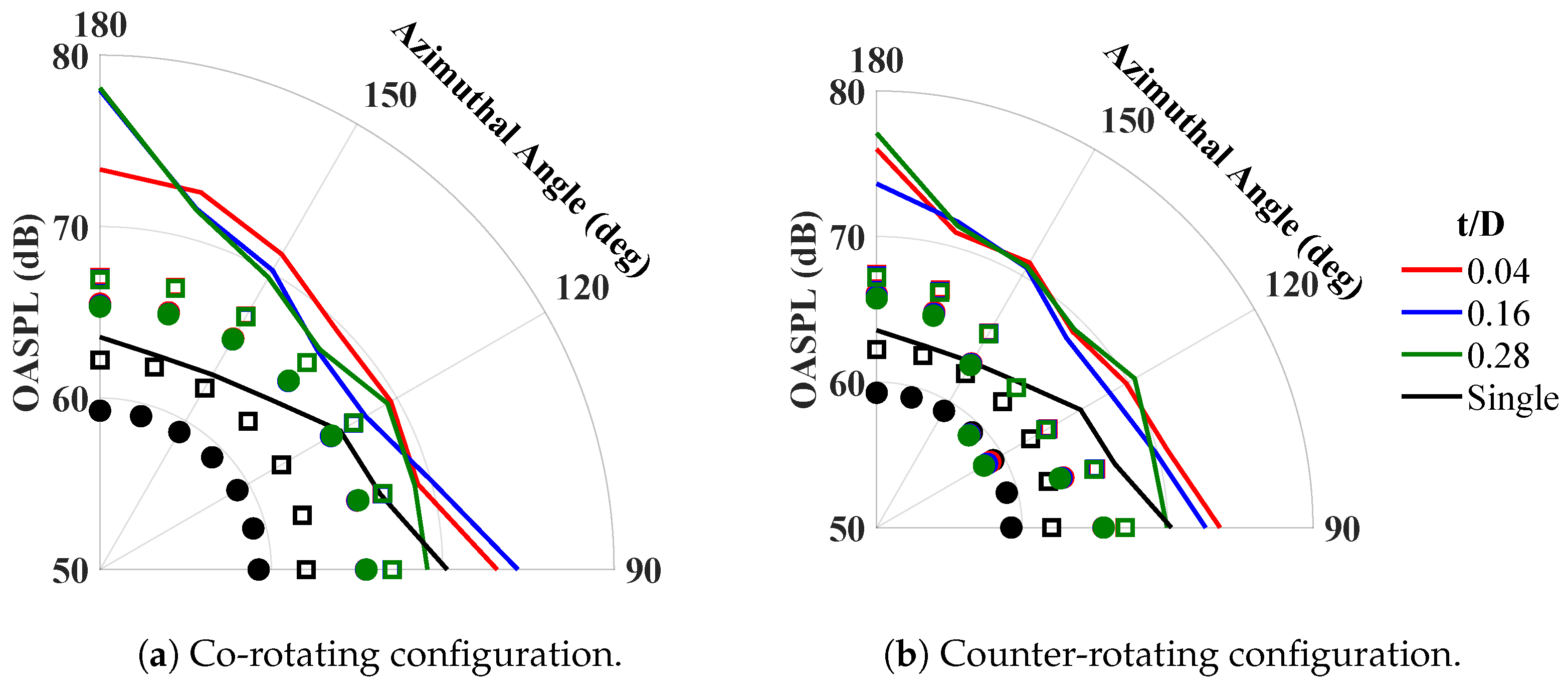
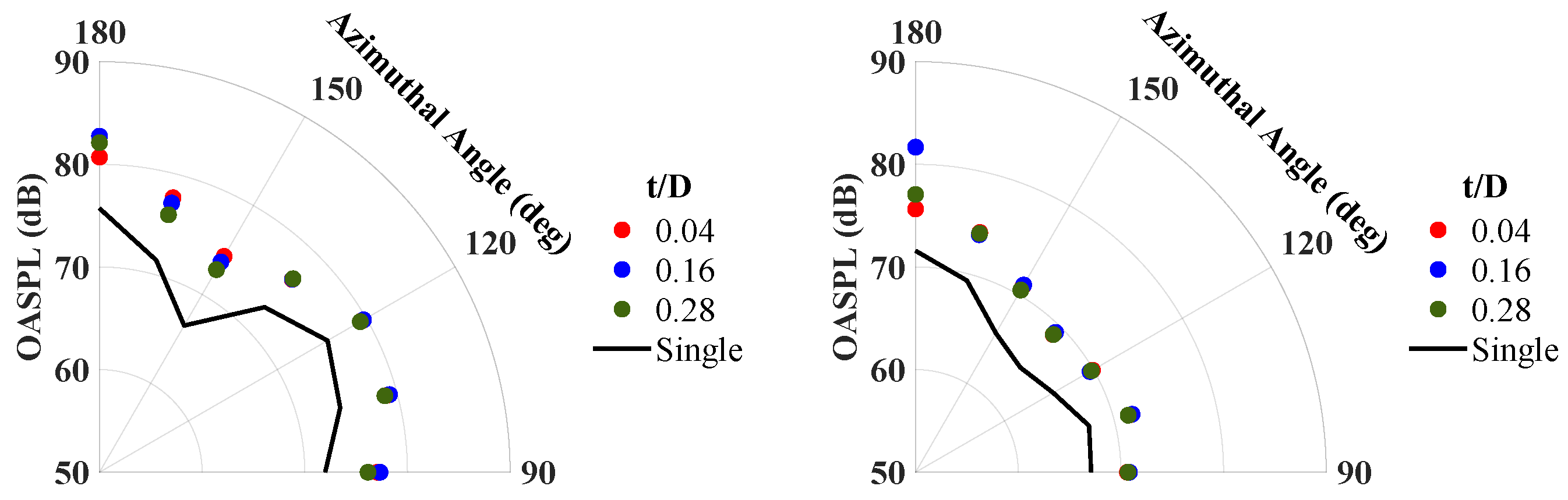
4.2.4. Overall Sound Pressure Level and Directivity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AMR | Adaptive Mesh Refinement |
| BPF | Blade Passage Frequency |
| BPM | Brooks, Pope, and Marcolini |
| CAA | Computational Aeroacoustics |
| CAD | Computer-Aided Design |
| CFD | Computational Fluid Dynamics |
| DNS | Direct Numerical Simulation |
| DoD | Department of Defense |
| eVTOL | Electric Vertical Take-off and Landing |
| FWH | Ffowcs-Williams Hawking |
| HPCMP | High Performance Computing Modernization Program |
| NS | Navier–Stokes |
| LBM | Lattice Boltzmann Methods |
| LES | Large Eddy Simulation |
| OASPL | Overall Sound Pressure Level |
| RPM | Revolutions per minute |
| PWL | Power Watt Level |
| SPL | Sound Pressure Level |
| VPM | Vortex Particle Method |
| UAM | Urban Air Mobility |
| UAV | Unmanned Aerial Vehicles |
| URANS | Unsteady Reynolds-Averaged Navier–Stokes |
Appendix A. Tonal and Broadband Noise Separation
References
- Rizzi, S.A.; Huff, D.L.; D. Douglas Boyd, J.; Bent, P.; Henderson, B.S.; Pascioni, K.A.; Sargent, D.C.; Josephson, D.L.; Marsan, M.; He, H.; et al. Urban Air Mobility Noise: Current Practice, Gaps, and Recommendations; Technical Report TP-2020-5007433; NASA: Hampton, VA, USA, 2020.
- Intaratep, N.; Alexander, W.N.; Devenport, W.J.; Grace, S.M.; Dropkin, A. Experimental Study of Quadcopter Acoustics and Performance at Static Thrust Conditions. In Proceedings of the 22nd AIAA/Council of European Aerospace Studies Aeroacoustics Conference, Lyon, France, 30 May–1 June 2016. [Google Scholar] [CrossRef] [Green Version]
- Zawodny, N.S.; Boyd, D.D. Investigation of Rotor-Airframe Interaction Noise Associated with Small-Scale Rotary-Wing Unmanned Aircraft Systems. In Proceedings of the American Helicopter Society 73rd Annual Forum, Fort Worth, TX, USA, 8–11 May 2017. [Google Scholar]
- Weitsman, D.; Stephenson, J.H.; Zawodny, N.S. Effects of flow recirculation on acoustic and dynamic measurements of rotary-wing systems operating in closed anechoic chambers. J. Acoust. Soc. Am. 2020, 148, 1325–1336. [Google Scholar] [CrossRef] [PubMed]
- Whelchel, J.; Alexander, W.N.; Intaratep, N. Propeller Noise in Confined Anechoic and Open Environments. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- De Paola, E. Aeroacoustic Experimental Characterization of Rotor-to-Rotor Interaction Effects. Ph.D. Thesis, Roma Tre University, Rome, Italy, 2020. [Google Scholar]
- Mankbadi, R.R.; Afari, S.O.; Golubev, V.V. High-Fidelity Simulations of Noise Generation in a Propeller-Driven Unmanned Aerial Vehicle. AIAA J. 2021, 59, 1020–1039. [Google Scholar] [CrossRef]
- Casalino, D.; Grande, E.; Romani, G.; Ragni, D.; Avallone, F. Towards the definition of a benchmark for low Reynolds number propeller aeroacoustics. In Proceedings of the 18th International Symposium on Transport Phenomena and Dynamics of Rotating Machinery, Online, 23–26 November 2020. [Google Scholar]
- Spalart, P. Strategies for turbulence modelling and simulations. Int. J. Heat Fluid Flow 2000, 21, 252–263. [Google Scholar] [CrossRef]
- Jia, Z.; Lee, S. Impulsive Loading Noise of Lift-Offset Coaxial Rotor in High-Speed Forward Flight. AIAA J. 2020, 58, 687–701. [Google Scholar] [CrossRef]
- Jain, R. Sensitivity Study of High-Fidelity Hover Predictions on the Sikorsky S-76 Rotor. J. Aircr. 2018, 55, 78–88. [Google Scholar] [CrossRef]
- Thai, A.D.; Grace, S.M.; Jain, R. The Effect of Turbulence Modeling Selection within HPCMP CREATE-AV Helios for Small Quadrotor Aerodynamics. J. Aircr. 2021. in review. [Google Scholar]
- Chen, S.; Doolen, G.D. Lattice Boltzmann Method for Fluid Flows. Annu. Rev. Fluid Mech. 1998, 30, 329–364. [Google Scholar] [CrossRef] [Green Version]
- Williams, J.E.F.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. Ser. A 1969, 264, 321–342. [Google Scholar] [CrossRef]
- Spalart, P.; Belyaev, K.V.; Shur, M.L.; Strelets, M.K.; Travin, A.K. On the differences in noise predictions based on solid and permeable surface Ffowcs Williams-Hawkings integral solutions. Int. J. Aeroacoustics 2019, 18, 621–646. [Google Scholar] [CrossRef]
- Lopes, L.V.; D. Douglas Boyd, J.; Nark, D.M.; Wiedemann, K.E. Identification of Spurious Signals from Permeable Ffowcs Williams and Hawkings Surfaces. In Proceedings of the American Helicopter Society 73rd Annual Forum, Fort Worth, TX, USA, 8–11 May 2017. [Google Scholar]
- Brooks, T.F.; Pope, D.S.; Marcolini, M.A. Airfoil Self-Noise and Prediction; Technical Report RP-1218; NASA: Hampton, VA, USA, 1989.
- Pettingill, N.A.; Zawodny, N.S. Identification and Prediction of Broadband Noise for a Small Quadcopter. In Proceedings of the 75th VFS Forum, Philadelphia, PA, USA, 13–16 May 2019. [Google Scholar]
- Russell, C.; Sekula, M. Comprehensive Analysis Modeling of Small-Scale UAS Rotors. In Proceedings of the American Helicopter Society 73rd Annual Forum, Fort Worth, TX, USA, 8–11 May 2017. [Google Scholar]
- Zawodny, N.S.; Boyd, D.D., Jr.; Burley, C.L. Acoustic Characterization and Prediction of Representative, Small-Scale Rotary-Wing Unmanned Aircraft System Components. In Proceedings of the American Helicopter Society 72nd Annual Forum, West Palm Beach, FL, USA, 16–19 May 2016. [Google Scholar]
- Nardari, C.; Casalino, D.; Polidoro, F.; Coralic, V.; Brodie, J.; Lew, P.T. Numerical and Experimental Investigation of Flow Confinement Effects on UAV Rotor Noise. In Proceedings of the 25th AIAA/Council of European Aerospace Studies Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar] [CrossRef]
- McKay, R.S.; Kingan, M.J. Multirotor Unmanned Aerial System Propeller Noise Caused by Unsteady Blade Motion. In Proceedings of the 25th AIAA/Council of European Aerospace Societies Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar] [CrossRef]
- Thai, A.D.; Grace, S.M. Prediction of Small Quadrotor Blade Induced Noise. In Proceedings of the 25th AIAA/Council of European Aerospace Societies Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar] [CrossRef]
- Alvarez, E.J.; Schenk, A.; Critchfield, T.; Ning, A. Rotor-on-Rotor Aeroacoustic Interactions of Multirotor in Hover. In Proceedings of the Vertical Flight Society 76th Annual Forum, Online, 5–8 October 2020. [Google Scholar]
- Casalino, D.; Grande, E.; Romani, G.; Ragni, D.; Avallone, F. Definition of a benchmark for low Reynolds number propeller aeroacoustics. Aerosp. Sci. Technol. 2021, 113, 106707. [Google Scholar] [CrossRef]
- Kocheemoolayil, J.G.; Stitch, G.D.; Barad, M.F.; Kiris, C. Propeller Noise predictions using the Lattice Boltzmann Method. In Proceedings of the 25th AIAA/Council of European Aerospace Societies Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar] [CrossRef]
- Zhou, W.; Ning, Z.; Li, H.; Hu, H. An Experimental Investigation on Rotor-to-Rotor Interactions of Small UAV. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Shukla, D.; Komerath, N. Multirotor Drone Aerodynamic Interaction Investigation. Drones 2018, 2, 43. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Lee, D.J. Rotor interactional effects on aerodynamic and noise characteristics of a small multirotor unmanned aerial vehicle. Phys. Fluids 2020, 32, 047107. [Google Scholar] [CrossRef] [Green Version]
- Bernardini, G.; Centracchio, F.; Gennaretti, M.; Iemma, U.; Pasquali, C.; Poggi, C.; Rossetti, M.; Serafini, J. Numerical Characteristics of the Aeroacoustic Signature of Propeller Arrays for Distributed Electric Propulsion. Appl. Sci. 2020, 10, 2643. [Google Scholar] [CrossRef] [Green Version]
- Afari, S.; Mankbadi, R.R. Simulations of Noise Generated by Rotor-Rotor Interactions at Static Conditions. In Proceedings of the AIAA Scitech 2021 Forum, Nashville, TN, USA, 11–15 January 2021. [Google Scholar] [CrossRef]
- Diaz, P.V.; Johnson, W.; Ahmad, J.; Yoon, S. Computational Study of the Side-by-Side Urban Air Taxi Concept. In Proceedings of the Vertical Flight Society 75th Annual Forum and Technology Display, Philadelphia, PA, USA, 13–16 May 2019. [Google Scholar]
- Sagaga, J.; Lee, S. CFD Hover Predictions for the Side-by-Side Urban Air Taxi Concept Rotor. In Proceedings of the AIAA Aviation 2020 Forum, Virtual, 15–19 June 2020. [Google Scholar] [CrossRef]
- Jia, Z.; Lee, S. Acoustic Analysis of Urban Air Mobility Quadrotor Aircraft. In Proceedings of the Vertical Flight Society Aeromechanics for Advanced Vertical Flight Technical Meeting, San Jose, CA, USA, 21–23 January 2020. [Google Scholar]
- Sagaga, J.; Lee, S. Acoustic Predictions for the Side-by-Side Air Taxi Rotor in Hover. In Proceedings of the 77th VFS Forum, Online, 10–14 May 2021. [Google Scholar]
- Sankaran, V.; Sitaraman, J.; Wissink, A.; Datta, A.; Jayaraman, B.; Potsdam, M.; Mavriplis, D.; Yang, Z.; O’Brien, D.; Saberi, H.; et al. Application of the Helios Computational Platform to Rotorcraft Flowfields. In Proceedings of the 48th Aerospace Sciences Meeting, Orlando, FL, USA, 4–7 January 2010. [Google Scholar] [CrossRef]
- Sankaran, V.; Wissink, A.; Datta, A.; Sitaraman, J.; Jayaraman, B.; Potsdam, M.; Katz, A.; Kamkar, S.; Roget, B.; Mavriplis, D.; et al. Overview of the Helios Version 2.0 Computational Platform for Rotorcraft Simulations. In Proceedings of the 49th Aerospace Sciences Meeting, Orlando, FL, USA, 4–7 January 2011. [Google Scholar] [CrossRef] [Green Version]
- Wissink, A.; Jude, D.; Jayaraman, B.; Roget, B.; Lakshminarayan, V.K.; Sitaraman, J.; Bauer, A.C.; Forsythe, J.R.; Trigg, R.D. New Capabilities in Helios Version 11. In Proceedings of the AIAA Scitech 2021 Forum, Nashville, TN, USA, 11–15 January 2021. [Google Scholar] [CrossRef]
- Thai, A.D.; Jain, R.; Grace, S.M. CFD Validation of Small Quadrotor Performance using CREATE-AV Helios. In Proceedings of the Vertical Flight Society 75th Annual Forum and Technology Display, Philadelphia, PA, USA, 13–16 May 2019. [Google Scholar]
- Thai, A.D.; Grace, S.M. Multirotor Trim using Loose Aerodynamic Coupling. In Proceedings of the Vertical Flight Society Aeromechanics for Advanced Vertical Flight Technical Meeting, San Jose, CA, USA, 21–23 January 2020. [Google Scholar]
- Lakshminarayan, V.K.; Sitaraman, J.; Roget, B.; Wissink, A.M. Development and Validation of a Multi-strand Solver for Complex Aerodynamic Flows. Comput. Fluids 2017, 147, 41–62. [Google Scholar] [CrossRef] [Green Version]
- Lakshminarayan, V.; Sitaraman, J.; Wissink, A. Sensitivity of Rotorcraft Hover Predictions to Mesh Resolution in Strand Grid Framework. AIAA J. 2019, 57, 3173–3184. [Google Scholar] [CrossRef]
- Yoon, S.; Chaderjian, N.M.; Pulliam, T.H.; Holst, T.L. Effect of Turbulence Modeling on Hovering Rotor Flows. In Proceedings of the 45th AIAA Fluid Dynamics Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar] [CrossRef] [Green Version]
- Yoon, S.; Lee, H.C.; Pulliam, T.H. Computational Analysis of Multi-Rotor Flows. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef] [Green Version]
- Yoon, S.; Diaz, P.V.; Boyd, D.D., Jr.; Chan, W.M.; Theodore, C.R. Computational Aerodynamic Modeling of Small Quadcopter Vehicles. In Proceedings of the American Helicopter Society 73rd Annual Forum, Fort Worth, TX, USA, 8–11 May 2017. [Google Scholar]
- Jain, R. Hover Predictions on the S-76 Rotor with Tip Shape Variation Using Helios. J. Aircr. 2018, 55, 66–77. [Google Scholar] [CrossRef]
- Diaz, P.V.; Yoon, S. High-Fidelity Computational Aerodynamics of Multi-Rotor Unmanned Aerial Vehicles. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef] [Green Version]
- Jia, Z.; Lee, S.; Sharma, K.; Brentner, K.S. Aeroacoustic analysis of a lift-offset coaxial rotor using high-fidelity CFD/CSD loose coupling simulation. J. Am. Helicopter Soc. 2020, 65, 1–15. [Google Scholar] [CrossRef]
- Jia, Z.; Lee, S.; Sharma, K.; Brentner, K.S. Aerodynamically induced noise of a lift-offset coaxial rotor with pitch attitude in high-speed forward flight. J. Sound Vib. 2020, 491, 115737. [Google Scholar] [CrossRef]
- Roget, B.; Sitaraman, J.; Lakshminarayan, V.; Wissink, A. Prismatic Mesh Generation Using Minimum Distance Fields. Comput. Fluids 2020, 200, 104429. [Google Scholar] [CrossRef]
- Sitaraman, J.; Floros, M.; Wissink, A.; Potsdam, M. Parallel domain connectivity algorithm for unsteady flow computations using overlapping and adaptive grids. J. Comput. Phys. 2010, 229, 4703–4723. [Google Scholar] [CrossRef]
- Spalart, P.; Allmaras, S. A One Equation Turbulence Model for Aerodynamic Flows. In Proceedings of the 30th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1992. [Google Scholar] [CrossRef]
- Bodling, A.; Potsdam, M. Numerical Investigation of Secondary Vortex Structures in a Rotor Wake. In Proceedings of the Vertical Flight Society 76th Annual Forum, Online, 5–8 October 2020. [Google Scholar]
- Brentner, K.S.; Bres, G.A.; Perez, G.; Jones, H.E. Maneuvering Rotorcraft Noise Prediction: A New Code for a New Problem. In Proceedings of the AHS Aerodynamics, Acoustics, and Test Evaluation Specialist Meeting, San Francisco, CA, USA, 23–25 January 2002. [Google Scholar]
- Farassat, F.; Succi, G.P. A review of propeller discrete frequency noise prediction technology with emphasis on two current methods for time domain calculations. J. Sound Vib. 1980, 71, 399–419. [Google Scholar] [CrossRef]
- Farassat, F. Derivation of Formulations 1 and 1A of Farassat; Technical Report TM–2007–214853; NASA: Hampton, VA, USA, 2007.
- Li, S.; Lee, S. Prediction of Rotorcraft Broadband Trailing-Edge Noise and Parameter Sensitivty Study. J. Am. Helicopter Soc. 2020, 65, 1–14. [Google Scholar] [CrossRef]
- Li, S.; Lee, S. Prediction of Urban Air Mobility Multirotor VTOL Broadband Noise Using UCD-QuietFly. J. Am. Helicopter Soc. 2021, 66, 1–13. [Google Scholar] [CrossRef]
- Li, S.; Lee, S. Acoustic Analysis of a Quiet Helicopter for Air Taxi Operations. In Proceedings of the Vertical Flight Society 77th Annual Forum and Technology Display, Online, 10–14 May 2021. [Google Scholar]
- Lee, S. Empirical Wall-Pressure Spectral modeling for Zero and Adverse Pressure Gradient Flows. AIAA J. 2018, 56, 1818–1829. [Google Scholar] [CrossRef]
- Amiet, R.K. Noise Due to Turbulent Flow Past a Trailing Edge. J. Sound Vib. 1976, 47, 387–393. [Google Scholar] [CrossRef]
- Moreau, S.; Roger, M. Back-scattering correction and further extensions of Amiet’s trailing edge noise model. Part II: Application. J. Sound Vib. 2009, 323, 397–425. [Google Scholar] [CrossRef]
- Lee, S.; Ayton, L.; Bertagnolio, F.; Moreau, S.; Chong, T.P.; Joseph, P. Turbulent boundary layer trailing-edge noise: Theory, computation, experiment, and application. Prog. Aerosp. Sci. 2021, 126, 100737. [Google Scholar] [CrossRef]
- Arterburn, D.; Duling, C.; Sallis, C. Final Report for the Uvionix Propeller Performance Measurement-Static Thrust; Technical Report; The University of Alabama in Huntsville: Huntsville, AL, USA, 2016. [Google Scholar]
- Innov8tive-Designs. Cobra Motor Test Data with APC 8x4.5-MR Prop. 2021. Available online: https://www.innov8tivedesigns.com/images/specs/CM-2206-30-APC-8x45MR-Perf-3S.pdf (accessed on 15 August 2021).
- APC-Propellers. APC Propeller Performance Data. 2021. Available online: https://www.apcprop.com/technical-information/performance-data/ (accessed on 15 August 2021).
- Leishman, G. Principles of Helicopter Aerodynamics, 2nd ed.; Cambridge University Press: New York, NY, USA, 2006. [Google Scholar]
- Pascioni, K.A.; Rizzi, S.A.; Schiller, N.H. Noise Reduction Potential of Phase Control for Distributed Propulsion Vehicles. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Schiller, N.H.; Pascioni, K.A.; Zawodny, N.S. Tonal Noise Control using Rotor Phase Synchronization. In Proceedings of the 75th VFS Forum, Philadelphia, PA, USA, 13–16 May 2019. [Google Scholar]
- Sree, D.; Stephens, D. Improved Separation of Tone and Broadband Noise Components from Open Rotor Acoustic Data. Aerospace 2016, 3, 29. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eret, P.; Bennett, G.J. A parametric study of airframe effects on the noise emission from installed contra-rotating open rotors. Int. J. Aeroacoustics 2018, 17, 624–654. [Google Scholar] [CrossRef]






















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thai, A.D.; De Paola, E.; Di Marco, A.; Stoica, L.G.; Camussi, R.; Tron, R.; Grace, S.M. Experimental and Computational Aeroacoustic Investigation of Small Rotor Interactions in Hover. Appl. Sci. 2021, 11, 10016. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110016
Thai AD, De Paola E, Di Marco A, Stoica LG, Camussi R, Tron R, Grace SM. Experimental and Computational Aeroacoustic Investigation of Small Rotor Interactions in Hover. Applied Sciences. 2021; 11(21):10016. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110016
Chicago/Turabian StyleThai, Austin David, Elisa De Paola, Alessandro Di Marco, Luana Georgiana Stoica, Roberto Camussi, Roberto Tron, and Sheryl Marie Grace. 2021. "Experimental and Computational Aeroacoustic Investigation of Small Rotor Interactions in Hover" Applied Sciences 11, no. 21: 10016. https://0-doi-org.brum.beds.ac.uk/10.3390/app112110016