
Rigid-Flexible Coupled Dynamic and Control for Thermally Induced Vibration and Attitude Motion of a Spacecraft with Hoop-Truss Antenna

Abstract
:1. Introduction
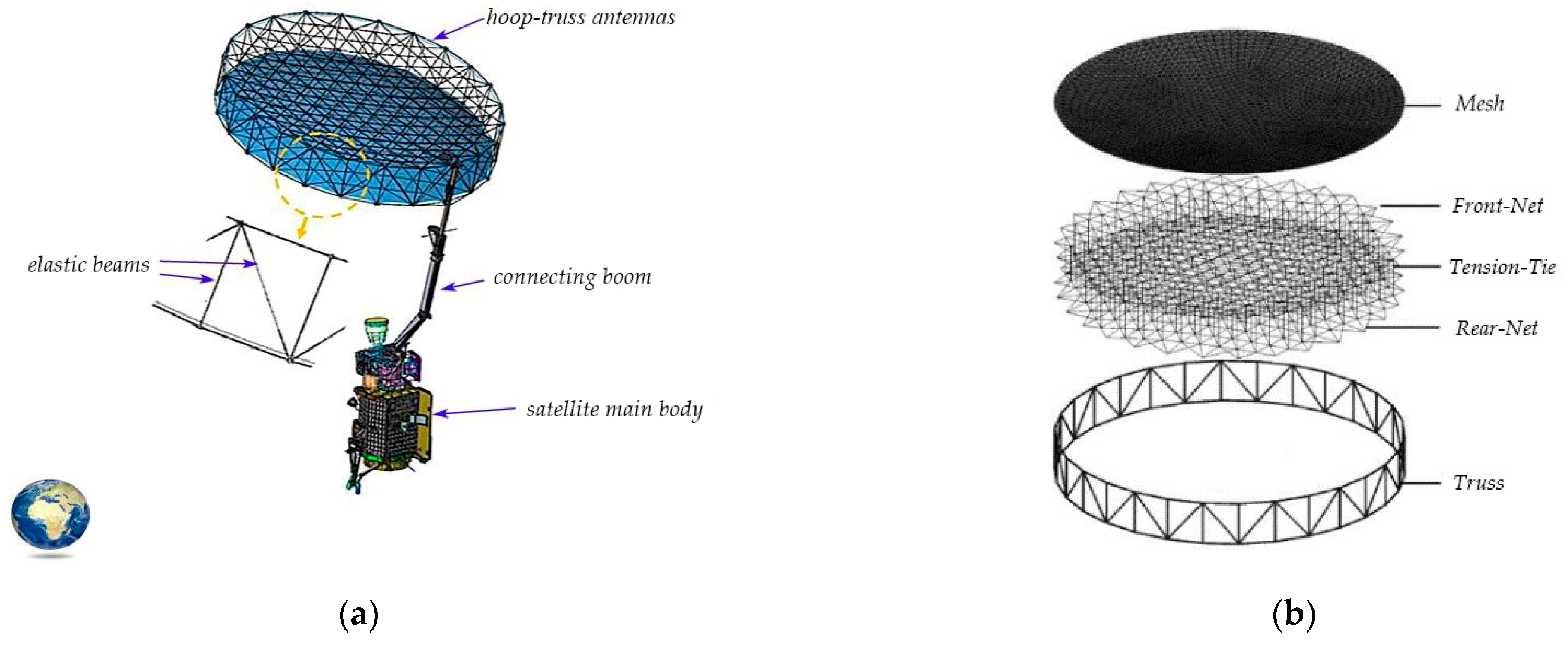
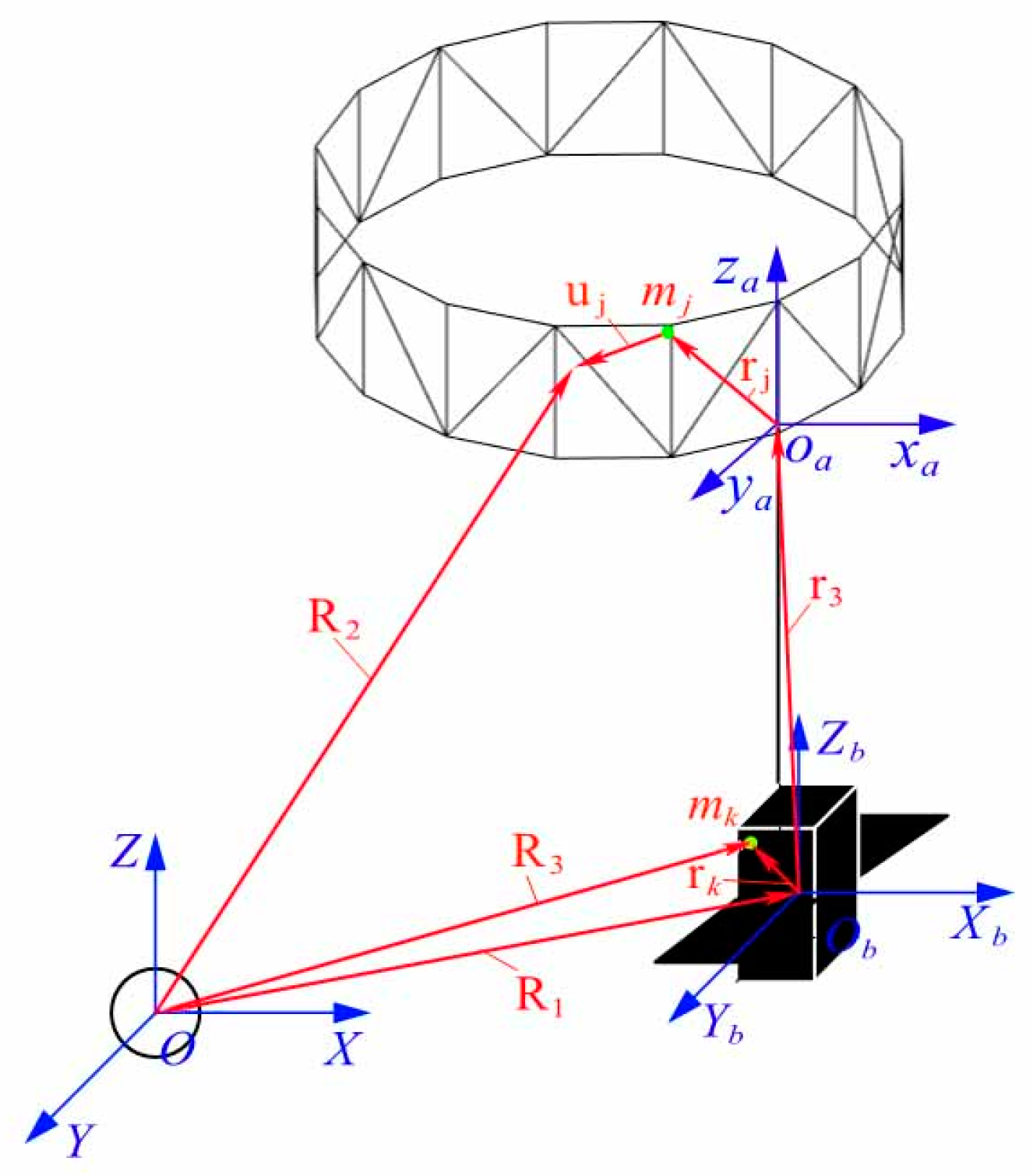
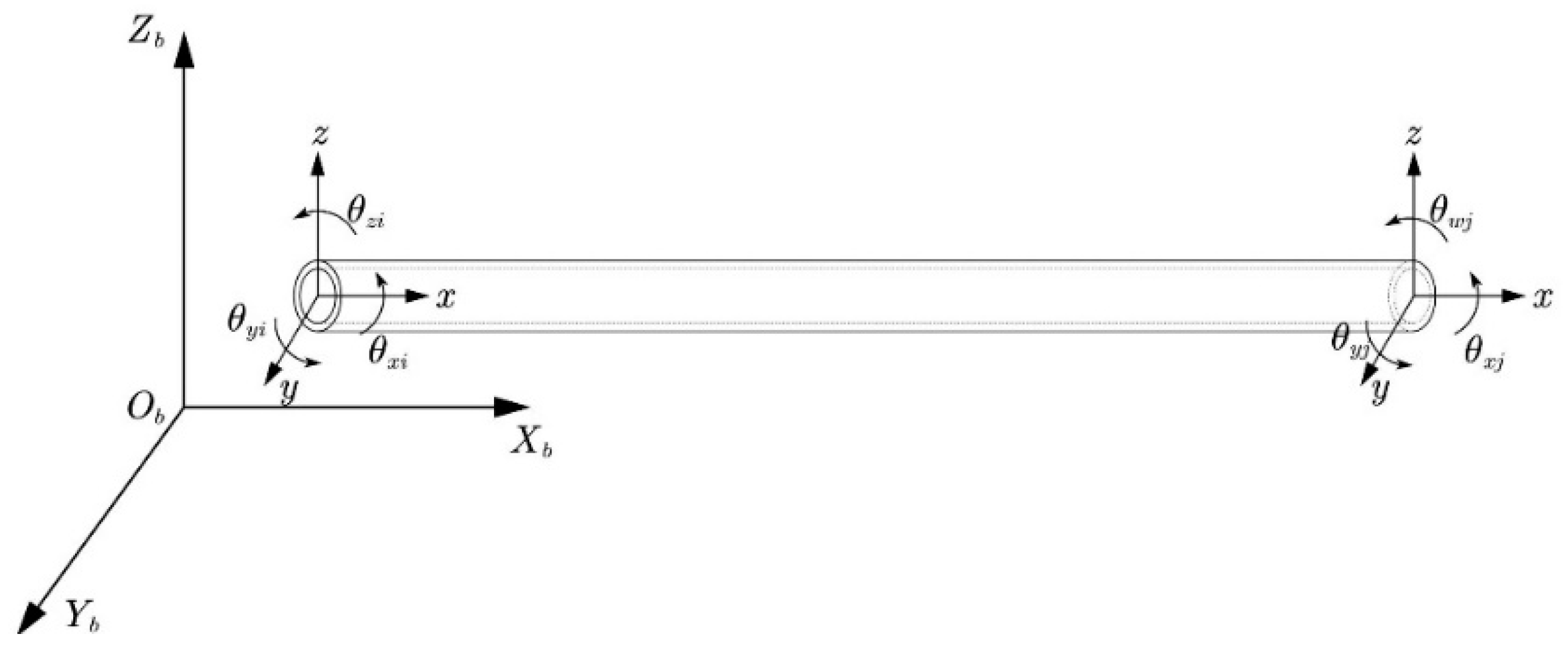
2. Rigid-Flexible Model for Spacecraft with Hoop-Truss Antenna
3. Thermal–Induced Structural Dynamic Analysis of Antenna
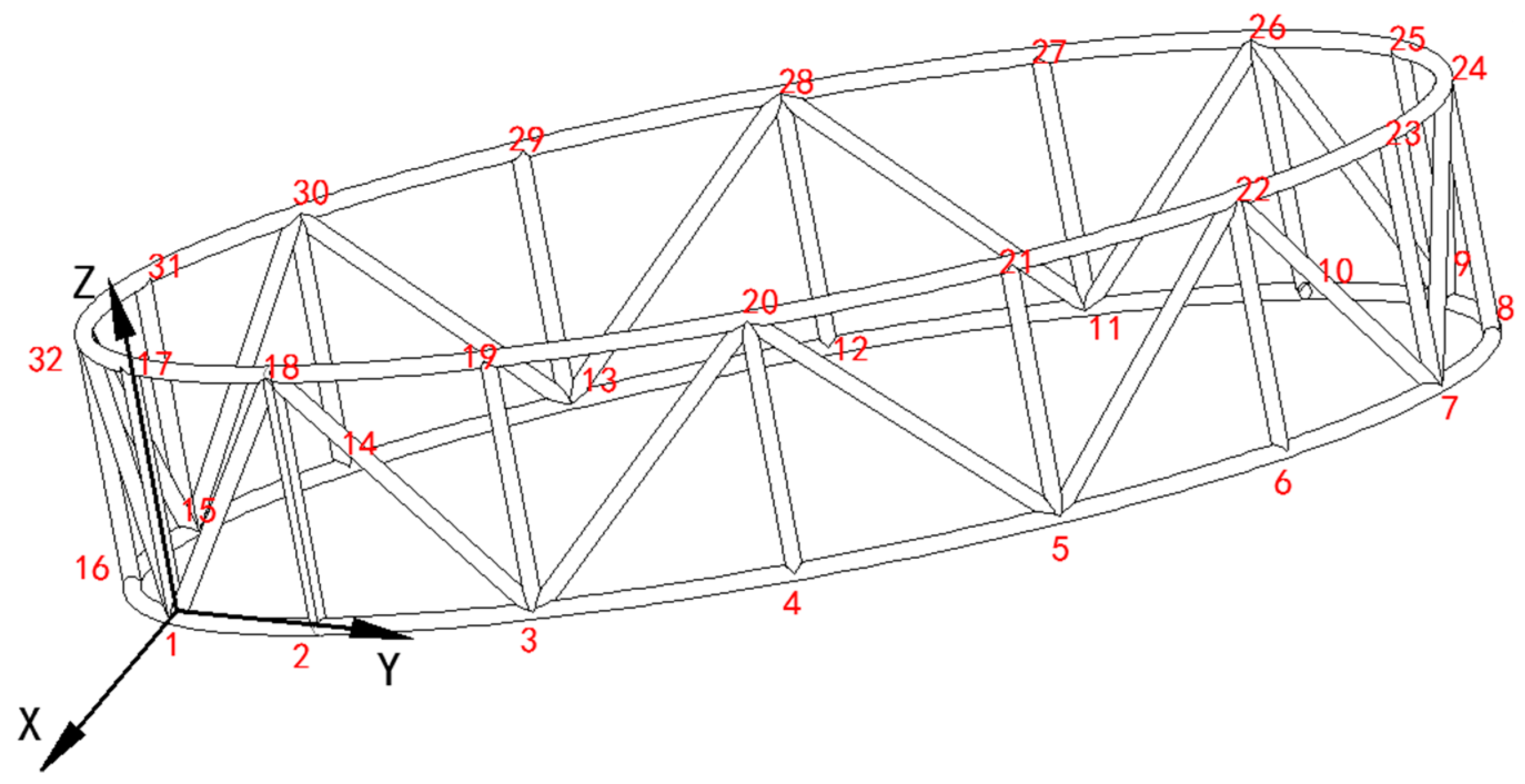
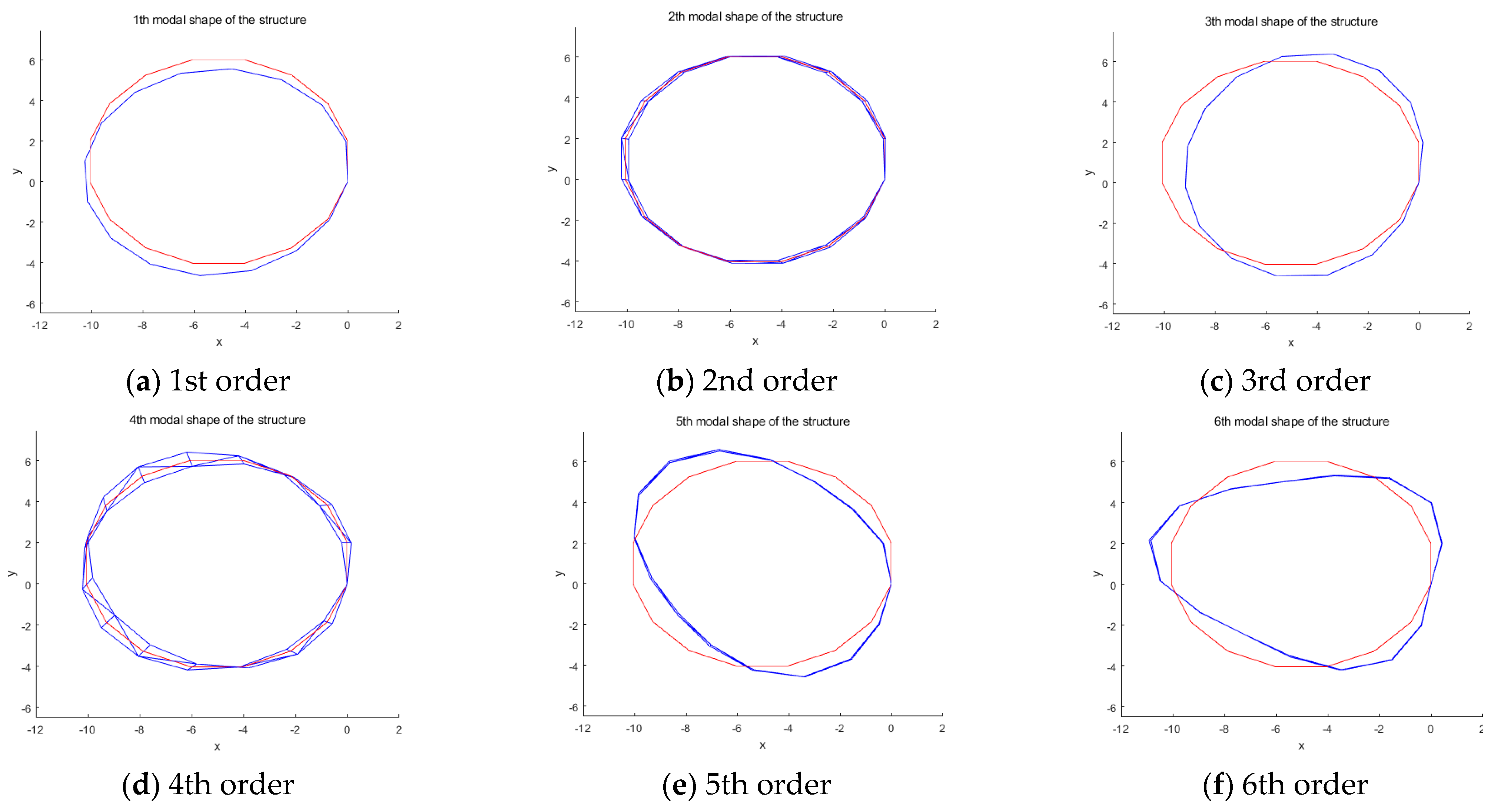
3.1. Modal and Frequency Analysis for Antenna by Finite Element Method
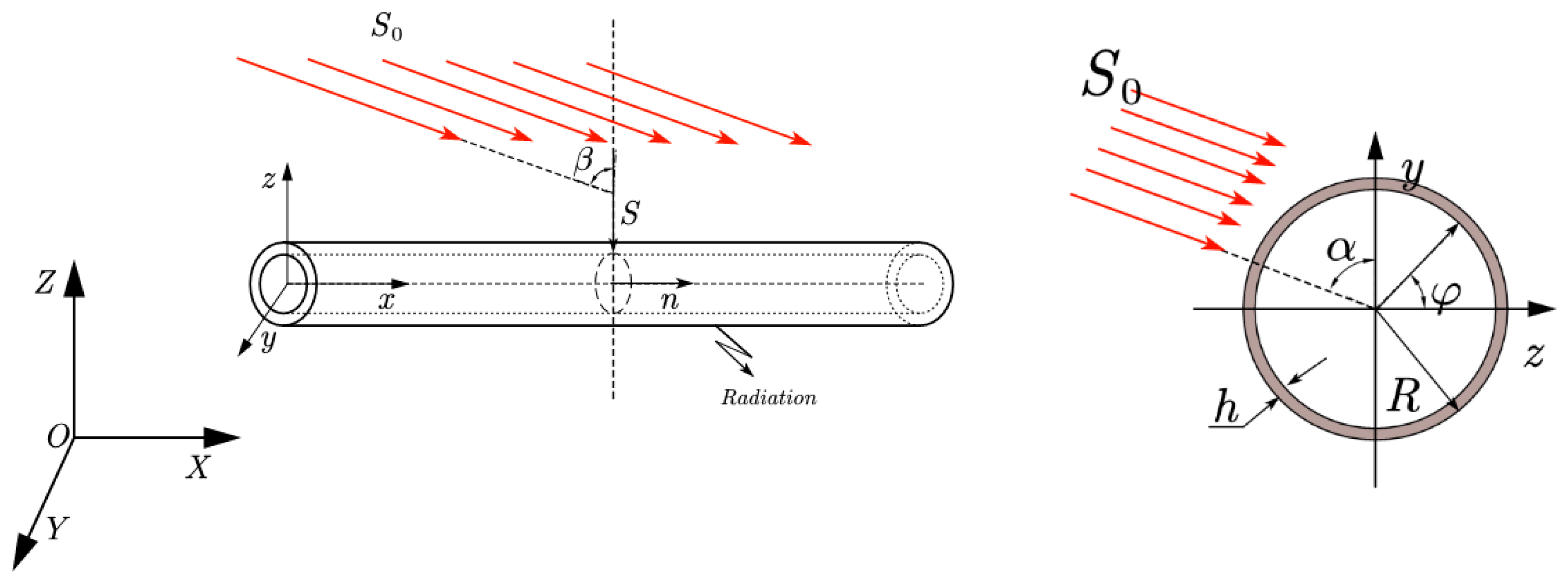
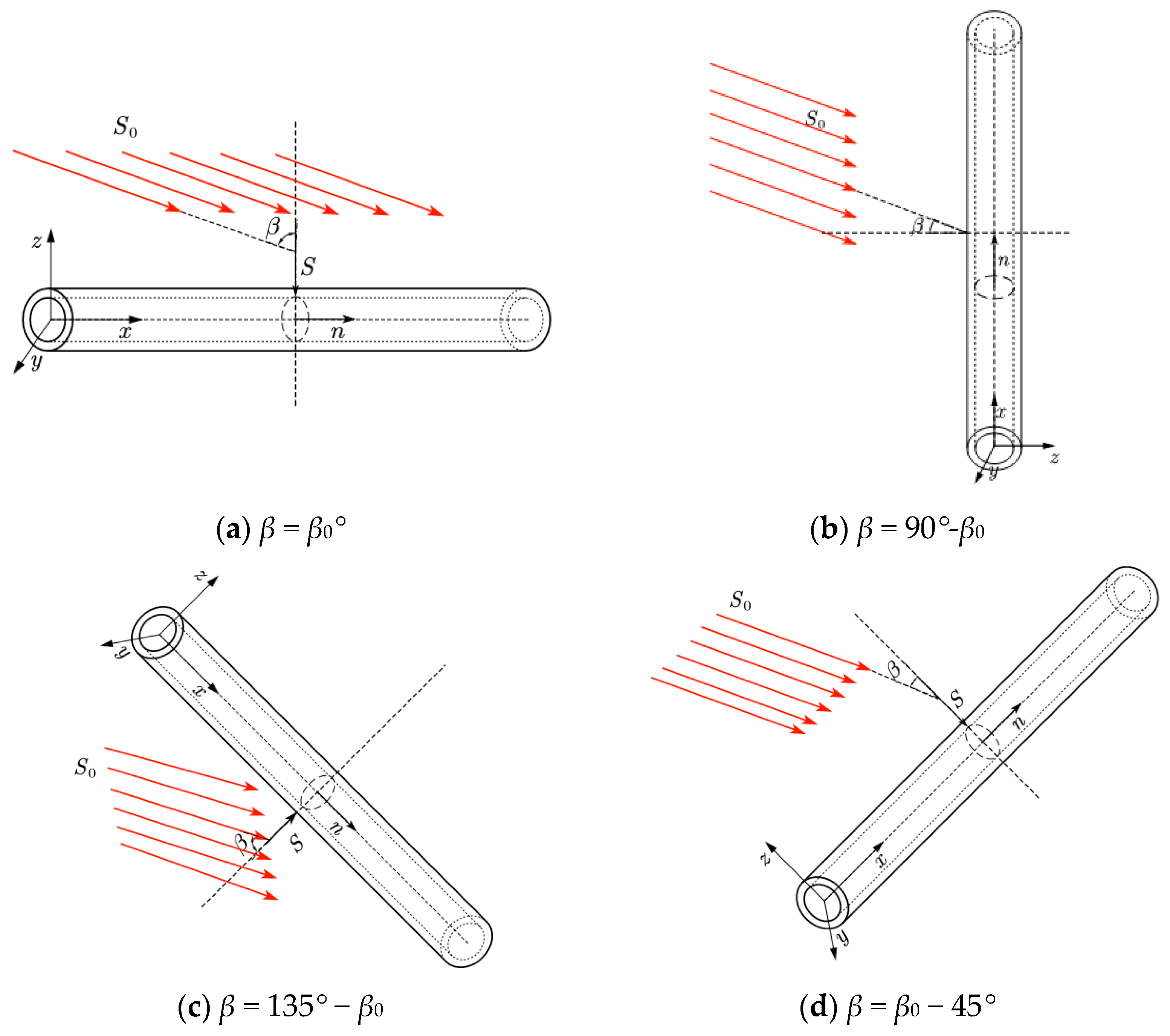
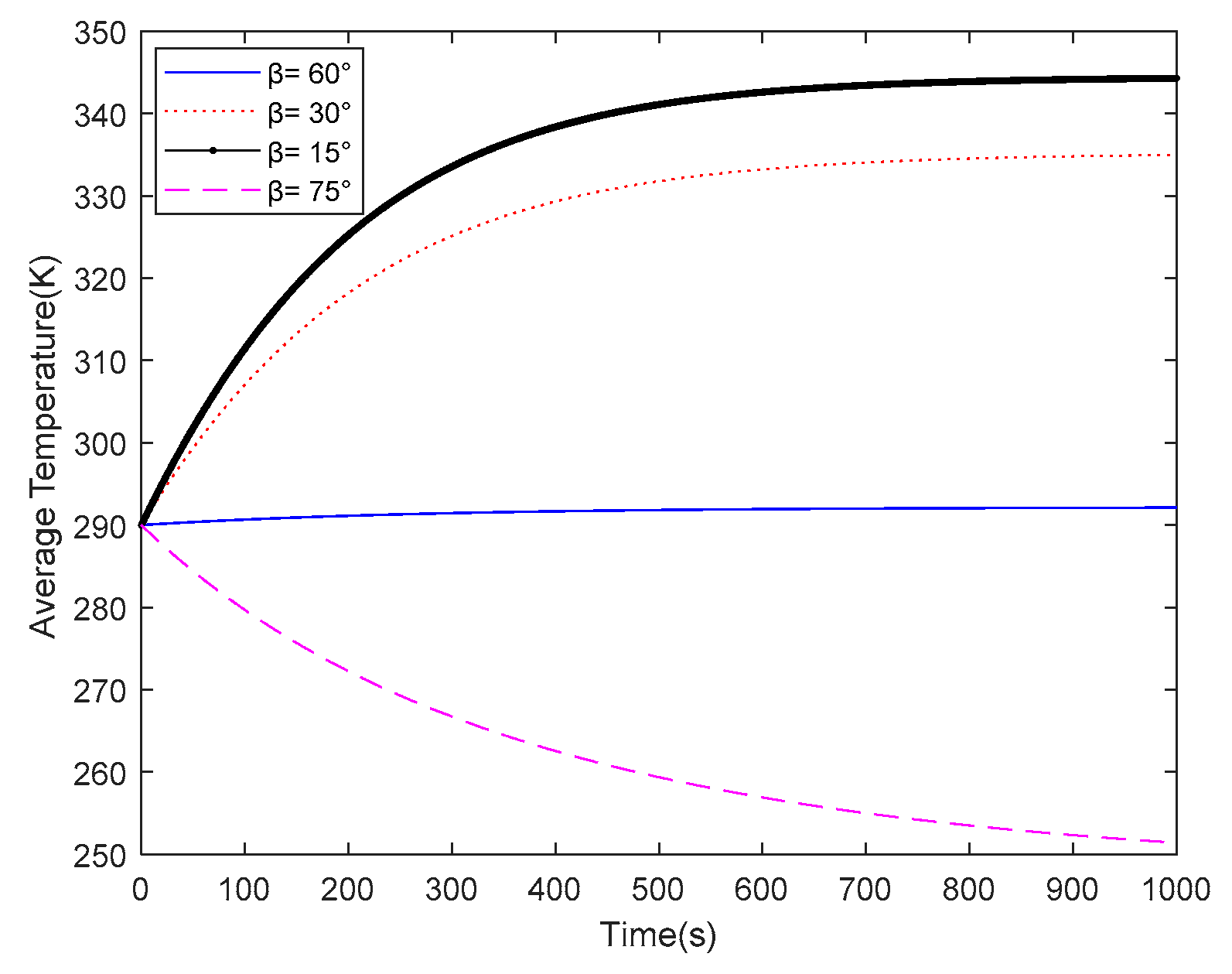
3.2. Thermal Analysis
4. Coupled Dynamic and Control for Thermally Induced Vibration and Attitude Motion
4.1. Dynamic Response of Rigid-Flexible Coupled Structure
4.2. Attitude Controller Design Based on Slide Mode Control Theory
4.3. Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gasbarri, P.; Monti, R.; De Angelis, C.; Sabatini, M. Effects of uncertainties and flexible dynamic contributions on the control of a spacecraft full-coupled model. Acta Astronaut. 2014, 94, 515–526. [Google Scholar] [CrossRef]
- Thornton, E.A.; Kim, Y.A. Thermally-induced bending vibrations of a flexible rolled-up solar-array. J. Spacecr. Rocket. 1993, 30, 438–448. [Google Scholar] [CrossRef]
- Xue, M.-D.; Duan, J.; Xiang, Z.-H. Thermally-induced bending-torsion coupling vibration of large scale space structures. Comput. Mech. 2007, 40, 707–723. [Google Scholar] [CrossRef]
- Johnston, J.D.; Thornton, E.A. Thermally induced dynamics of satellite solar panels. J. Spacecr. Rocket. 2000, 37, 604–613. [Google Scholar] [CrossRef]
- Pelton, J.N.; Madry, S.; Camacho-Lara, S. Handbook of Satellite Applications; Springer: New York, NY, USA, 2013. [Google Scholar]
- Xue, Y.; Li, Y.; Guang, J.; Zhang, X.; Guo, J. Small satellite remote sensing and applications—History, current and future. Int. J. Remote Sens. 2008, 29, 4339–4372. [Google Scholar] [CrossRef]
- Liu, L.; Cao, D.; Wei, J. Rigid-flexible coupling dynamic modeling and vibration control for flexible spacecraft based on its global analytical modes. Sci. China-Technol. Sci. 2019, 62, 608–618. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Sun, S.; Cao, D.; Liu, X. Dynamic characteristics of flexible spacecraft with double solar panels subjected to solar radiation. Int. J. Mech. Sci. 2019, 151, 22–32. [Google Scholar] [CrossRef]
- Azimi, M.; Joubaneh, E.F. Dynamic modeling and vibration control of a coupled rigid-flexible high-order structural system: A comparative study. Aerosp. Sci. Technol. 2020, 102, 105875. [Google Scholar] [CrossRef]
- Cao, Y.; Cao, D.; Huang, W. Nonlinear dynamic modeling and decoupling for rigid-flexible coupled system of spacecraft with rapid maneuver. Inst. Mech. Eng. Part C-J. Mech. Eng. Sci. 2019, 233, 4896–4913. [Google Scholar] [CrossRef]
- Guo, X.; Yang, X.; Liu, F.; Liu, Z.; Tang, X. Dynamic analysis of the flexible hub-beam system based on rigid-flexible coupling mechanism. Inst. Mech. Eng. Part K-J. Multi-Body Dyn. 2020, 234, 536–545. [Google Scholar] [CrossRef]
- Axisa, F. Modeling of Mechanical Systems—Structural Elements; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Hu, Q.; Jia, Y.; Xu, S. A new computer-oriented approach with efficient variables for multibody dynamics with motion constraints. Acta Astronaut. 2012, 81, 380–389. [Google Scholar] [CrossRef]
- Liu, C.; Tian, Q.; Hu, H. Dynamics of a large scale rigid-flexible multibody system composed of composite laminated plates. Multibody Syst. Dyn. 2011, 26, 283–305. [Google Scholar] [CrossRef]
- Garcia-Vallejo, D.; Mayo, J.; Escalona, J.L.; Dominguez, J. Three-dimensional formulation of rigid-flexible multibody systems with flexible beam elements. Multibody Syst. Dyn. 2008, 20, 1–28. [Google Scholar] [CrossRef]
- Géradin, M.; Rixen, D.J. Mechanical Vibrations: Theory and Application to Structural Dynamics; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Rao, S.S.; Atluri, S.N. The Finite Element Method in Engineering; Elmsford: Oxford, UK; Pergamon Press: New York, NY, USA, 1982. [Google Scholar]
- Bergan, P.G.; Nygard, M.K. Finite-elements with increased freedom in choosing shape functions. Int. J. Numer. Methods Eng. 1984, 20, 643–663. [Google Scholar] [CrossRef]
- Felippa, C.A. The extended free formulation of finite elements in linear elasticity. J. Appl. Mech.-Trans. ASME 1989, 56, 609–616. [Google Scholar] [CrossRef]
- Shen, Z.; Li, H.; Liu, X.; Hu, G. Thermal-structural dynamic analysis of a satellite antenna with the cable-network and hoop-truss supports. J. Therm. Stresses 2019, 42, 1339–1356. [Google Scholar] [CrossRef]
- Felippa, C. A compendium of FEM integration formulas for symbolic work. Eng. Comput. 2004, 21, 867–890. [Google Scholar] [CrossRef]
- Shen, Z.X.; Hu, G.K. Thermally induced vibrations of solar panel and their coupling with satellite. Int. J. Appl. Mech. 2013, 5, 312. [Google Scholar] [CrossRef] [Green Version]
- Guo, W.; Li, Y.H.; Li, Y.Z.; Tian, S.P.; Wang, S.N. Thermal-structural analysis of large deployable space antenna under extreme heat loads. J. Therm. Stresses 2016, 39, 887–905. [Google Scholar] [CrossRef]
- Shen, Z.X.; Hu, G.K. Thermoelastic-Structural Analysis of Space Thin-Walled Beam Under Solar Flux. Aiaa J. 2019, 57, 1784–1788. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.H.; Liu, M.; Shi, Y. Neural adaptive integral sliding mode control for attitude tracking of flexible spacecraft with signal quantisation and actuator nonlinearity. Int. J. Syst. Sci. 2020, 51, 2909–2921. [Google Scholar] [CrossRef]
- Hu, Q.L. Sliding mode maneuvering control and active vibration damping of three-axis stabilized flexible spacecraft with actuator dynamics. Nonlinear Dyn. 2008, 52, 227–248. [Google Scholar] [CrossRef]
- Shahravi, M.; Kabganian, M.; Alasty, A. Adaptive robust attitude control of a flexible spacecraft. Int. J. Robust Nonlinear Control 2006, 16, 287–302. [Google Scholar] [CrossRef]
- Dong, C.Y.; Xu, L.J.; Chen, Y.; Wang, Q. Networked flexible spacecraft attitude maneuver based on adaptive fuzzy sliding mode control. Acta Astronaut. 2009, 65, 1561–1570. [Google Scholar] [CrossRef]
- Qu, Z.Q.; Gao, W.B. State observation and variable structure control of rotational maneuvers of a flexible spacecraft. Acta Astronaut. 1989, 19, 657–667. [Google Scholar] [CrossRef]
- Hu, Q.L. A composite control scheme for attitude maneuvering and elastic mode stabilization of flexible spacecraft with measurable output feedback. Aerosp. Sci. Technol. 2009, 13, 81–91. [Google Scholar] [CrossRef]
- Gong, S.; Li, J.J. A new inclination cranking method for a flexible spinning solar sail. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2680–2696. [Google Scholar] [CrossRef]
- Cao, L.; Chen, X.Q. Input-output linearization minimum sliding-mode error feedback control for spacecraft formation with large perturbations. Inst. Mech. Eng. Part G-J. Aerosp. Eng. 2015, 229, 352–368. [Google Scholar] [CrossRef]
- Bang, H.; Ha, C.K.; Kim, J.H. Flexible spacecraft attitude maneuver by application of sliding mode control. Acta Astronaut. 2005, 57, 841–850. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E (Pa) | Poisson’s Ratio | ρ (kg/m3) | L (m) | A (m2) | J (m4) |
|---|---|---|---|---|---|
| 2.1 × 1011 | 0.3 | 7860 | 2 | 1.2 × 10−5 | 1.1 × 10−9 |
| Natural Frequency | 1st Order Q1 | 2nd Order Q2 | 3rd Order Q3 | 4th Order Q4 | 5th Order Q5 | 6th Order Q6 |
|---|---|---|---|---|---|---|
| Results by Equation (15) | 0.0956 | 0.1450 | 0.2656 | 0.5135 | 0.5621 | 0.9534 |
| Multiphysics FEA | 0.0945 | 0.1453 | 0.2660 | 0.5151 | 0.5632 | 0.9541 |
| Relative error | 1.15% | 0.2% | 0.15% | 0.3% | 0.2% | 1.0% |
| Vibration type | Roll | Bend | Respiration | Torsion | Respiration | Respiration |
| No- De | 1st Order Q1 | 2nd Order Q2 | 3rd Order Q3 | 4th Order Q4 | 5th Order Q5 | 6th Order Q6 |
|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 0 | 0 | |
| 2 | −0.0675 | 0.0487 | 0.1634 | 0.1483 | −0.3308 | 0.4136 |
| −3.3781 × 10−7 | −6.9022 × 10−8 | −9.9813 × 10−7 | −6.1993 × 10−5 | 1.2884 × 10−5 | −1.1044 × 10−5 | |
| −2.0289 × 10−7 | −1.0936 × 10−5 | −1.4794 × 10−6 | 1.1054 × 10−4 | 1.9173 × 10−5 | −7.9880 × 10−6 | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | |
| 32 | −6.2998 × 10−5 | −0.0212 | 6.7216 × 10−5 | 0.0650 | −0.0055 | 0.0047 |
| 0.0001 | −0.0488 | 0.0005 | 0.1555 | −0.0128 | 0.01150 | |
| 0.0648 | −0.0336 | 0.141 | 0.1031 | 0.2396 | 0.3014 |
| Parameter | Value | Units | Parameter | Value | Units |
|---|---|---|---|---|---|
| E | 2.1 × 1011 | Pa | kx | 16.6 | W/m·K |
| ν | 0.3 | - | kφ | 16.6 | W/m·K |
| ρ | 7860 | kg/m3 | ε | 0.13 | - |
| c | 502 | J/kg·K | αs | 0.6 | - |
| l | 2 | m | αT | 1 × 10−8 | 1/K |
| R | 0.009733 | m | S0 | 1350 | W/m2 |
| r | 0.00953 | m | β0 | 60 | degree |
| Time/s | Rolling Bias/Deg | Yawing Bias/Deg | Pitching Bias/Deg |
|---|---|---|---|
| 0.5 | 3.130 × 10−3 | 1.674 × 10−3 | 4.298 × 10−3 |
| 0.65 | 2.189 × 10−3 | 9.872 × 10−4 | 7.625 × 10−4 |
| 1 | 1.313 × 10−3 | 6.569 × 10−4 | 4.055 × 10−4 |
| 2 | 7.461 × 10−4 | 3.649 × 10−4 | 3.892 × 10−4 |
| 7 | 5.087 × 10−5 | 4.853 × 10−5 | 5.472 × 10−5 |
| Time/s | Rolling Bias/Deg | Yawing Bias/Deg | Pitching Bias/Deg |
|---|---|---|---|
| 0.5 | 3.840 × 10−3 | 3.959 × 10−3 | 5.570 × 10−3 |
| 0.7 | 2.647 × 10−3 | 2.617 × 10−3 | 4.496 × 10−3 |
| 0.85 | 2.348 × 10−3 | 2.348 × 10−3 | 4.228 × 10−3 |
| 1 | 2.319 × 10−3 | 2.319 × 10−3 | 4.198 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Li, X.; Qian, Y.-J.; Yang, H.-L. Rigid-Flexible Coupled Dynamic and Control for Thermally Induced Vibration and Attitude Motion of a Spacecraft with Hoop-Truss Antenna. Appl. Sci. 2022, 12, 1071. https://0-doi-org.brum.beds.ac.uk/10.3390/app12031071
Liu Y, Li X, Qian Y-J, Yang H-L. Rigid-Flexible Coupled Dynamic and Control for Thermally Induced Vibration and Attitude Motion of a Spacecraft with Hoop-Truss Antenna. Applied Sciences. 2022; 12(3):1071. https://0-doi-org.brum.beds.ac.uk/10.3390/app12031071
Chicago/Turabian StyleLiu, Yue, Xin Li, Ying-Jing Qian, and Hong-Lei Yang. 2022. "Rigid-Flexible Coupled Dynamic and Control for Thermally Induced Vibration and Attitude Motion of a Spacecraft with Hoop-Truss Antenna" Applied Sciences 12, no. 3: 1071. https://0-doi-org.brum.beds.ac.uk/10.3390/app12031071