
Active Flutter Suppression and Aeroelastic Response of Functionally Graded Multilayer Graphene Nanoplatelet Reinforced Plates with Piezoelectric Patch


Abstract
:1. Introduction
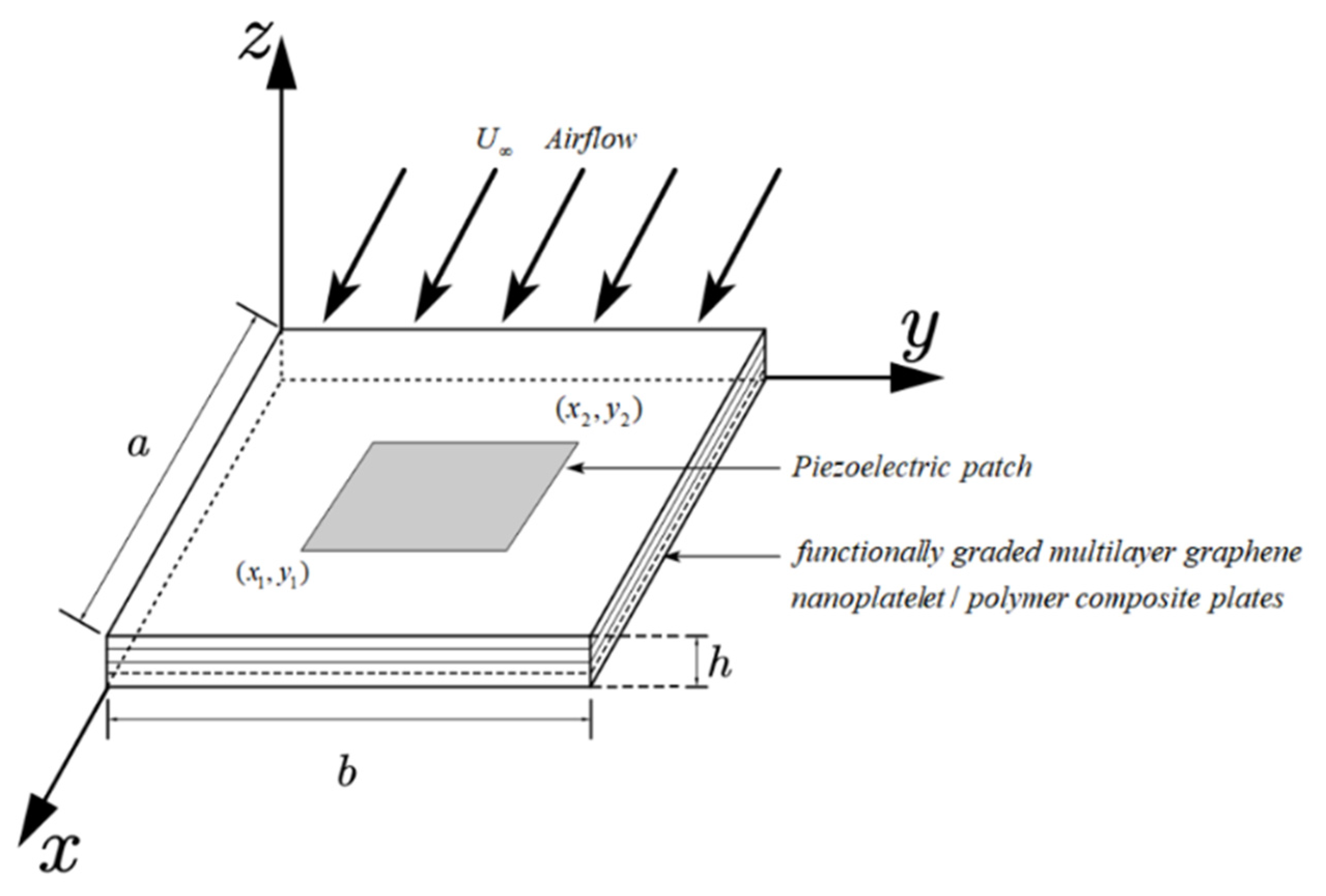
2. Problem Formulation
3. Flutter Analysis
4. Numerical Result
4.1. Comparison Study
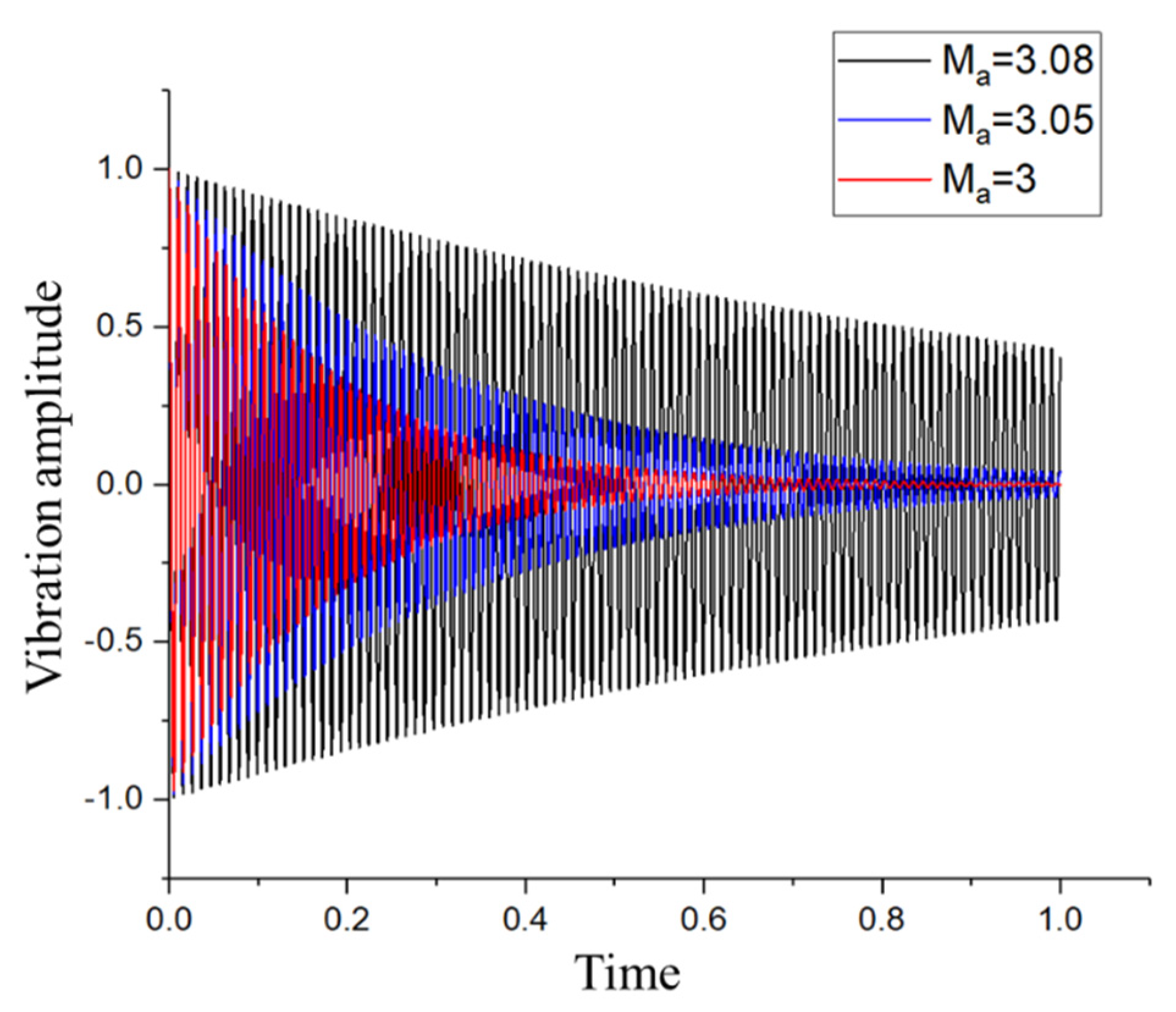
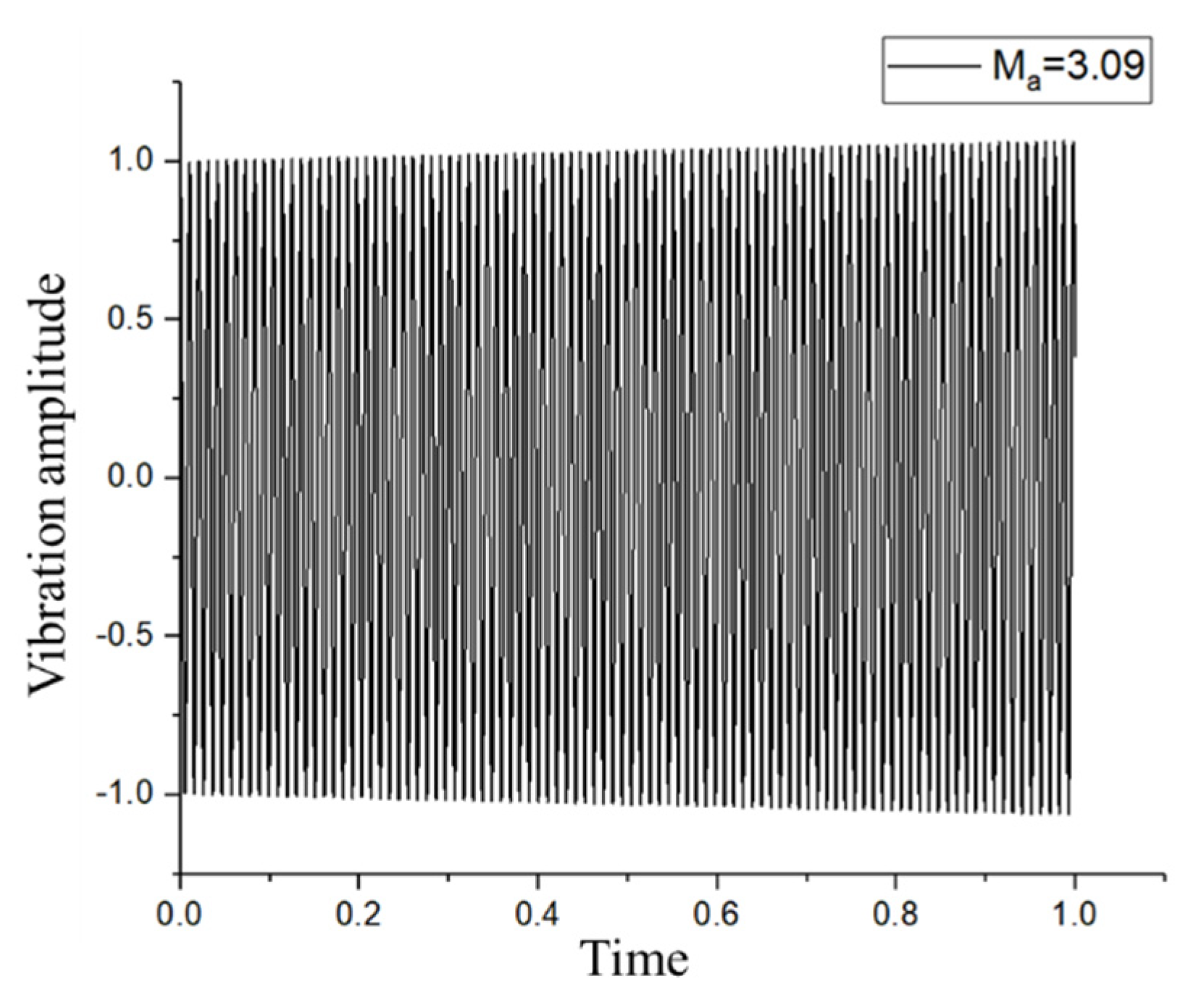
4.2. Vibration Characteristics
4.3. Flutter Suppression
5. Conclusions
- (1)
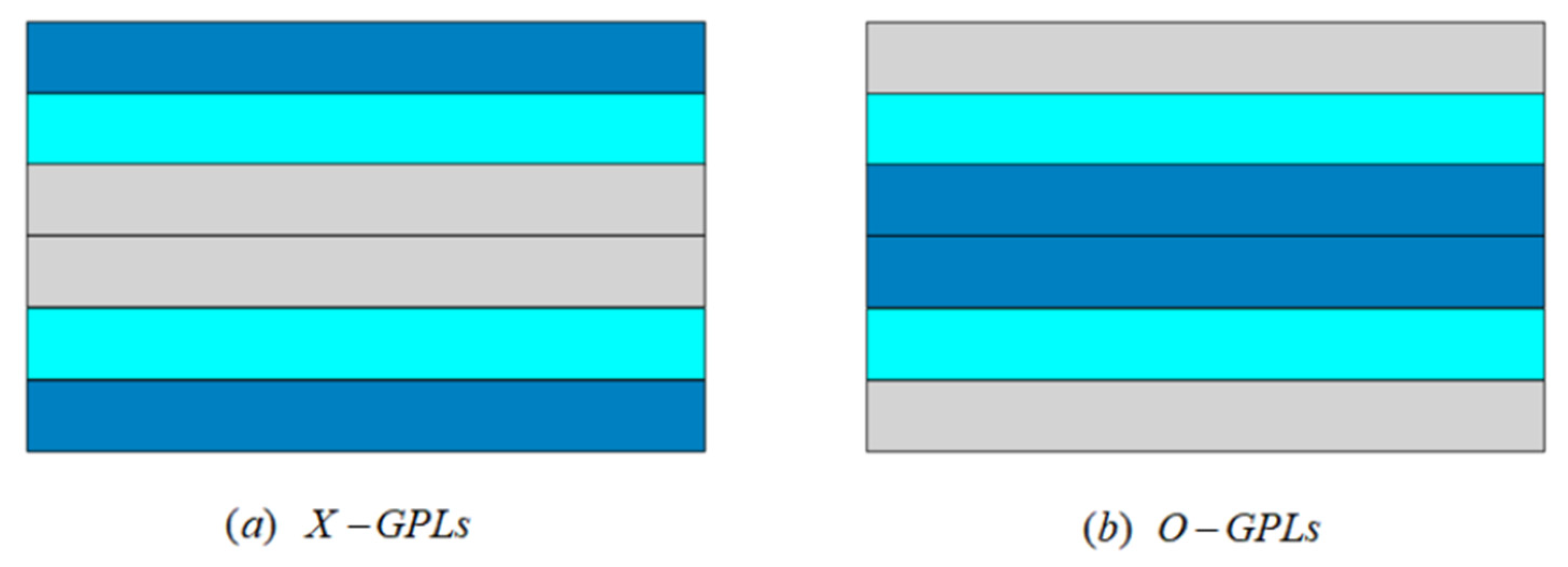
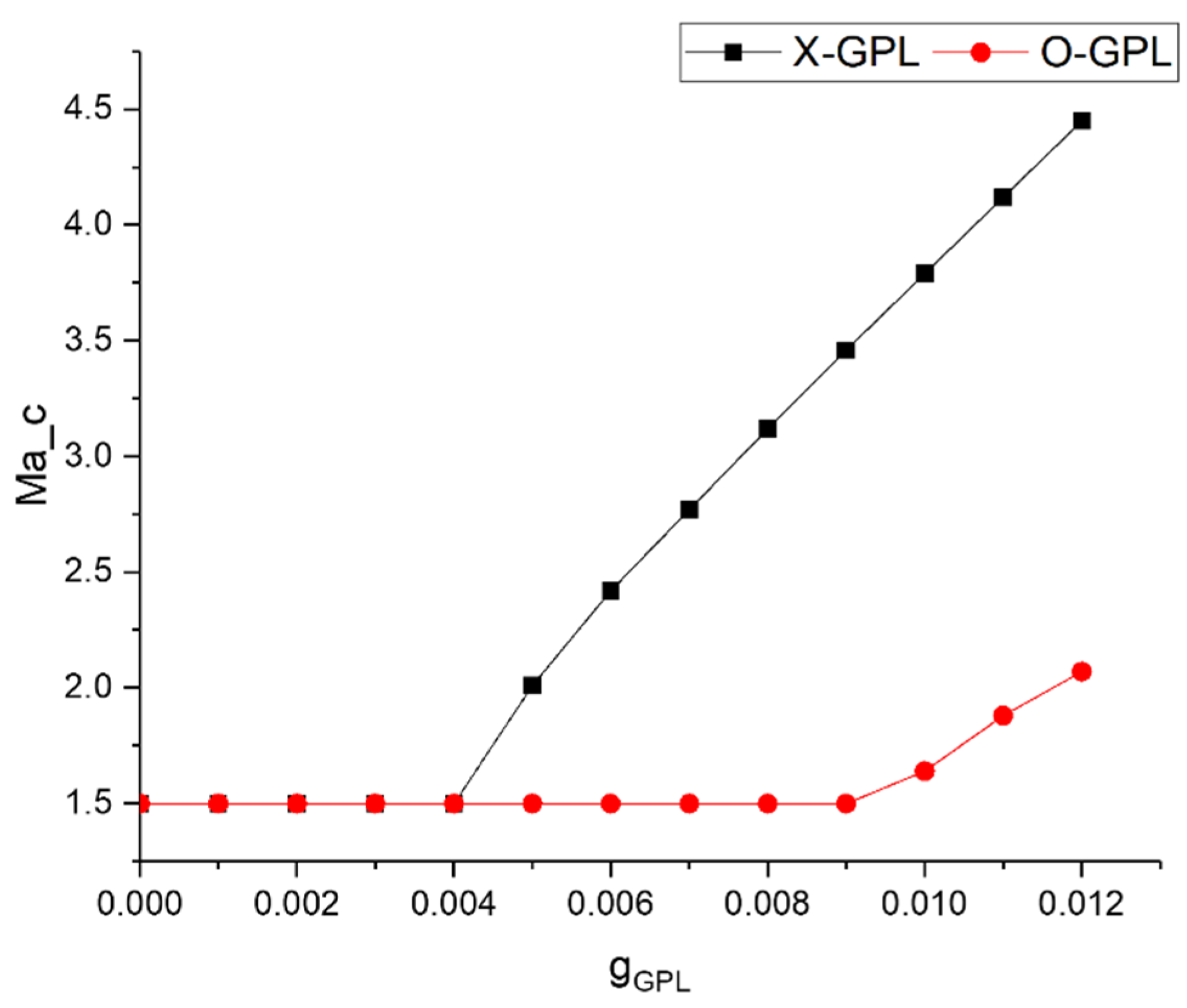
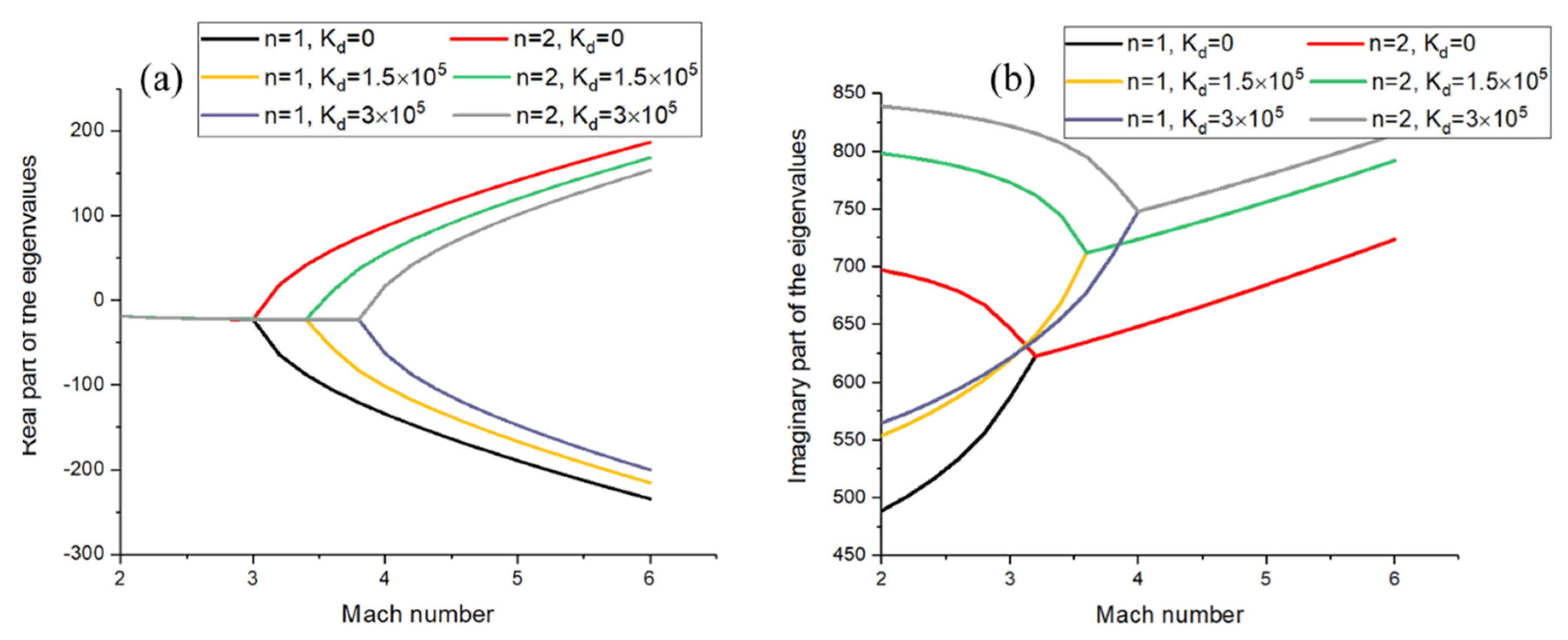
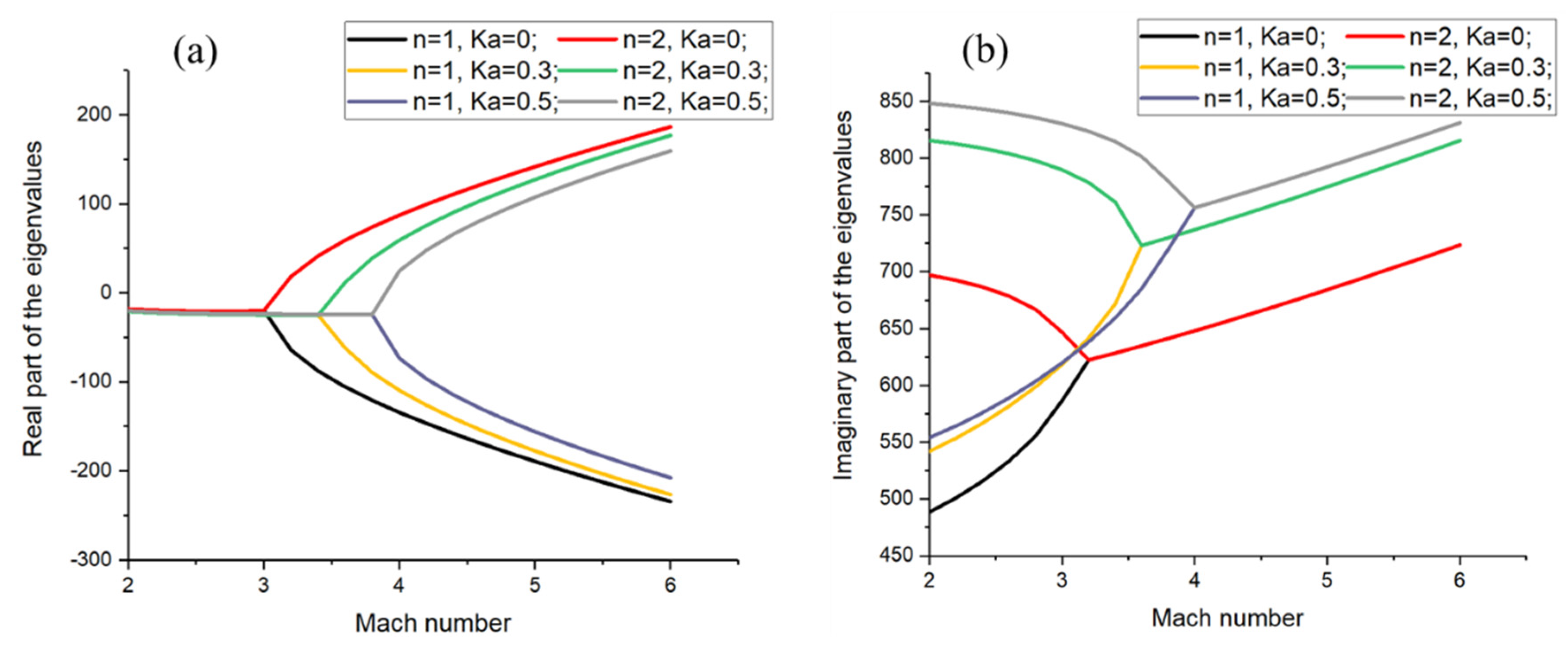
- Adding a small content of GPLs nanofillers can raise the critical flutter Mach number. The reinforced effect of X-GPLs distribution is better than O-GPLs distribution.
- (2)
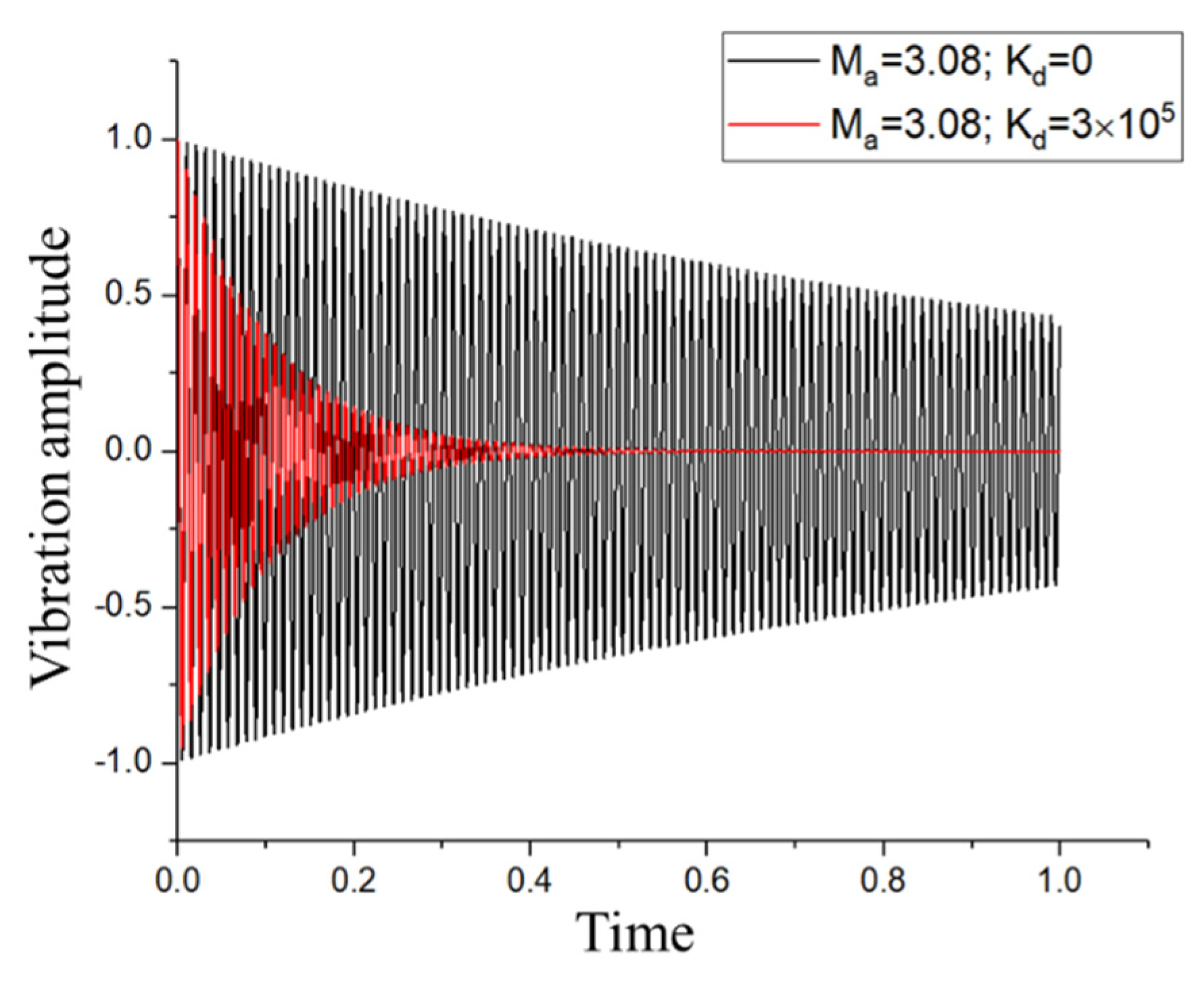
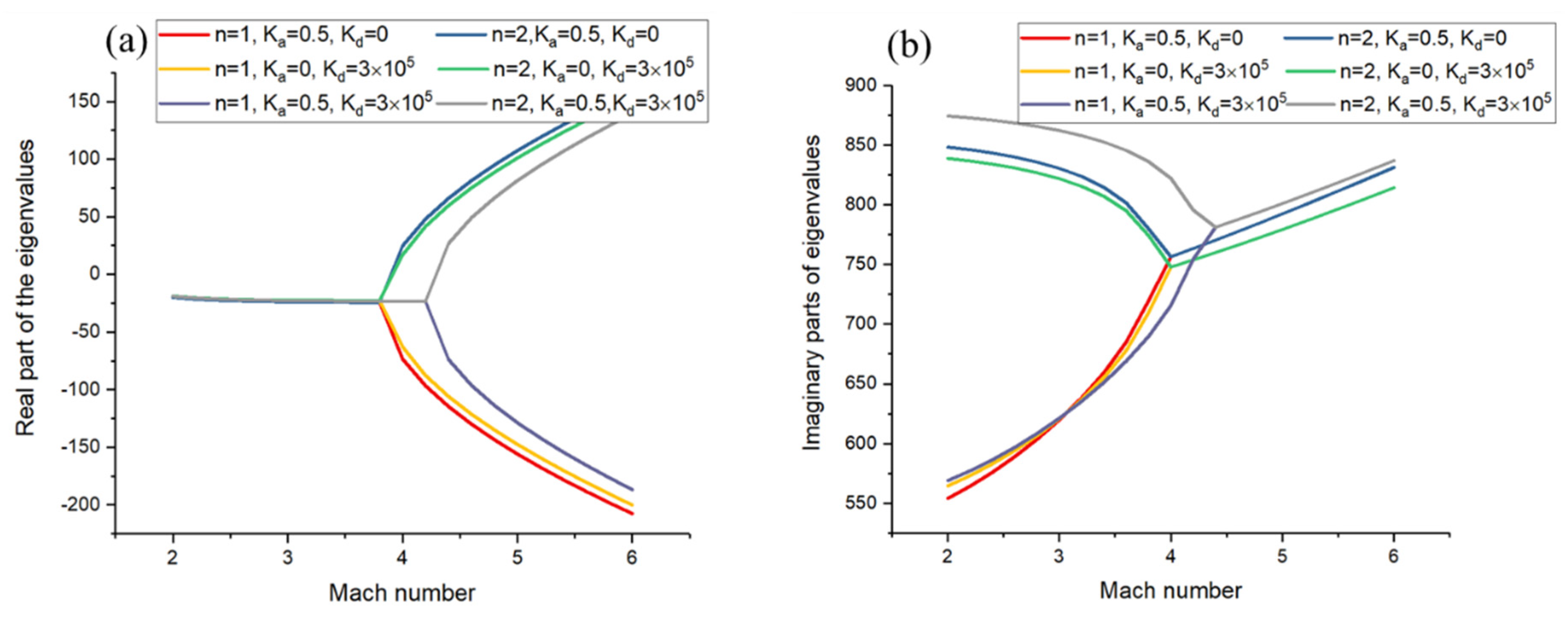
- The displacement and acceleration feedback control can enhance the aeroelastic flutter characteristics of GPLs reinforced composite plate by attaching active stiffness and active mass.
- (3)
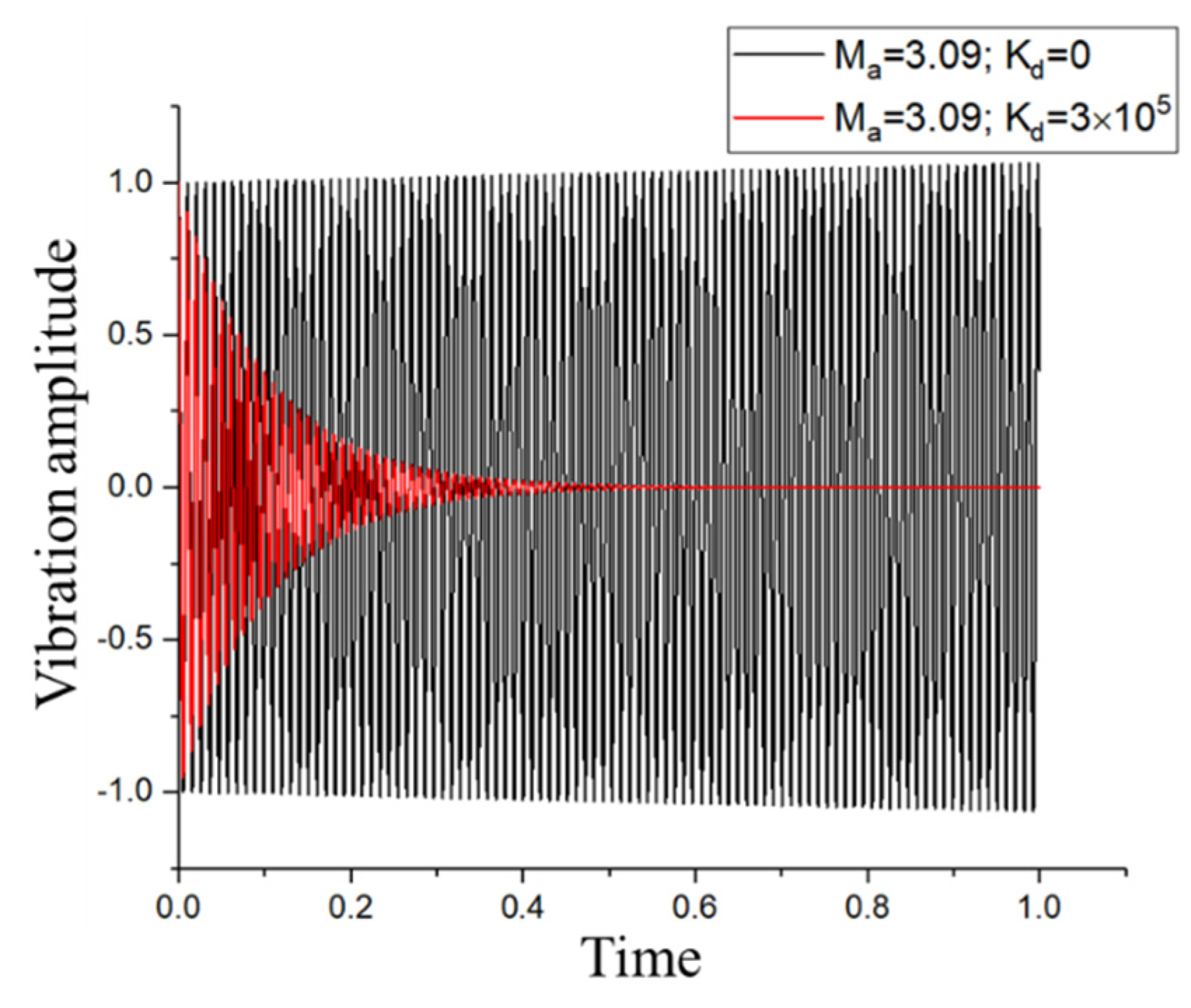
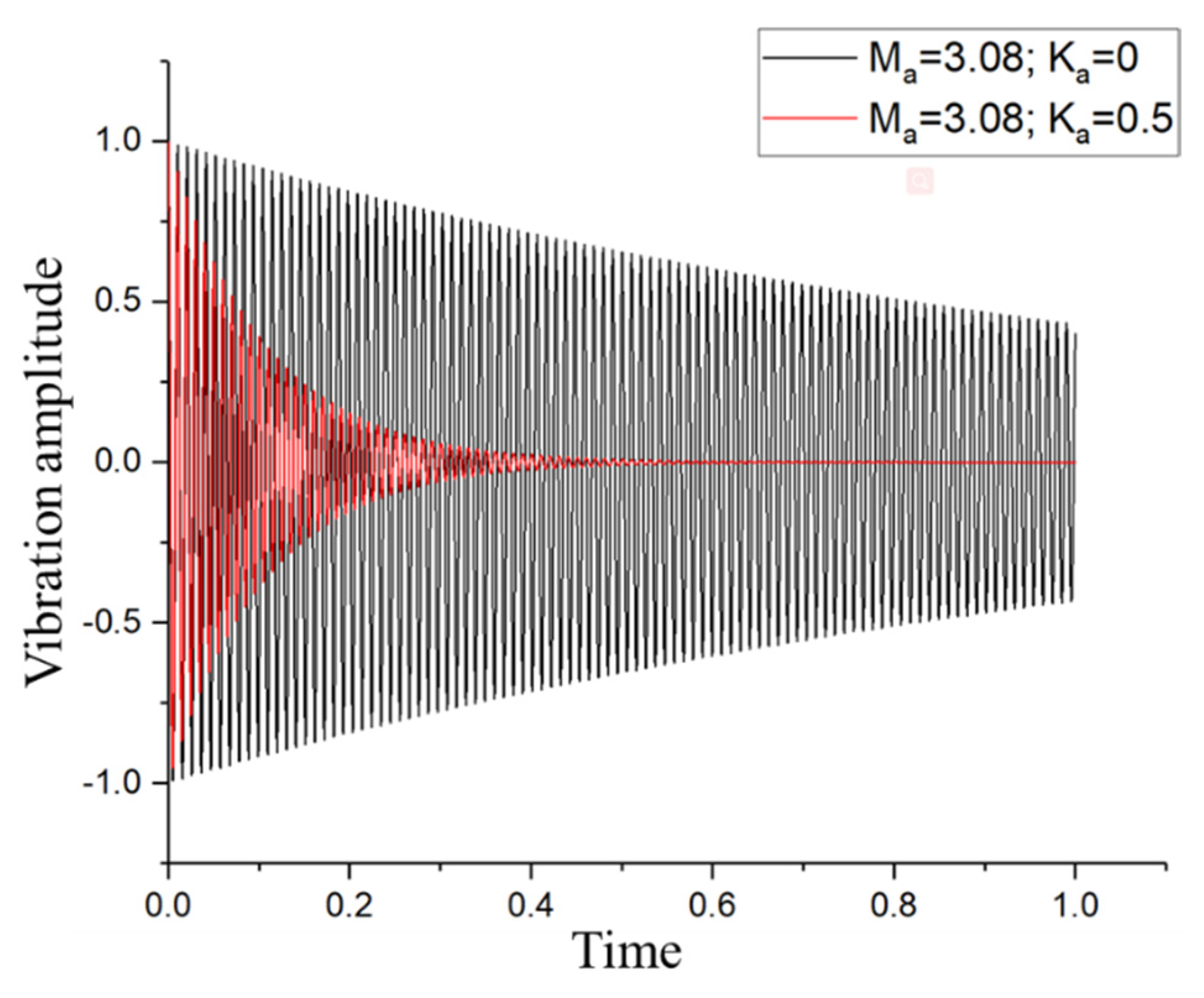
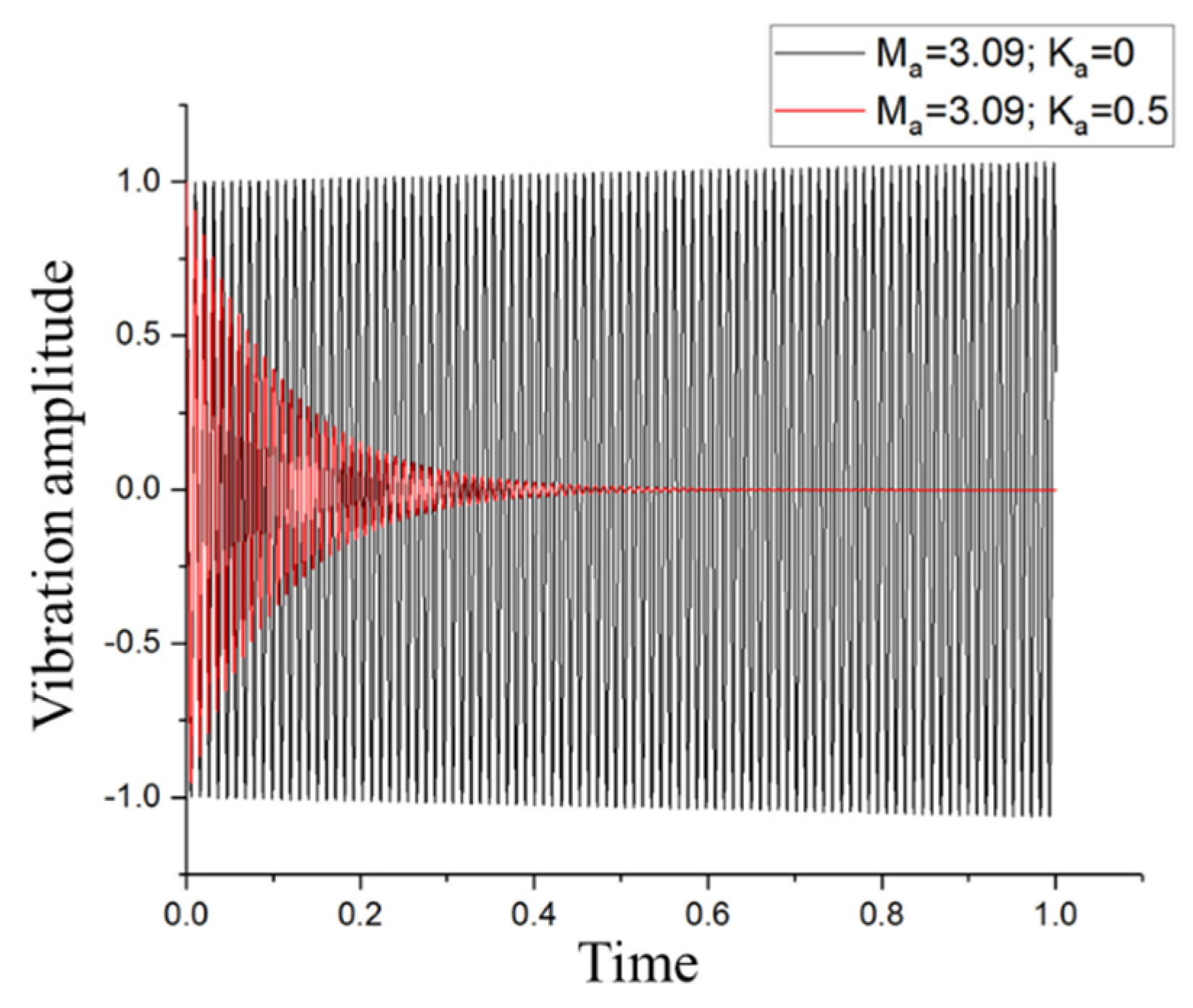
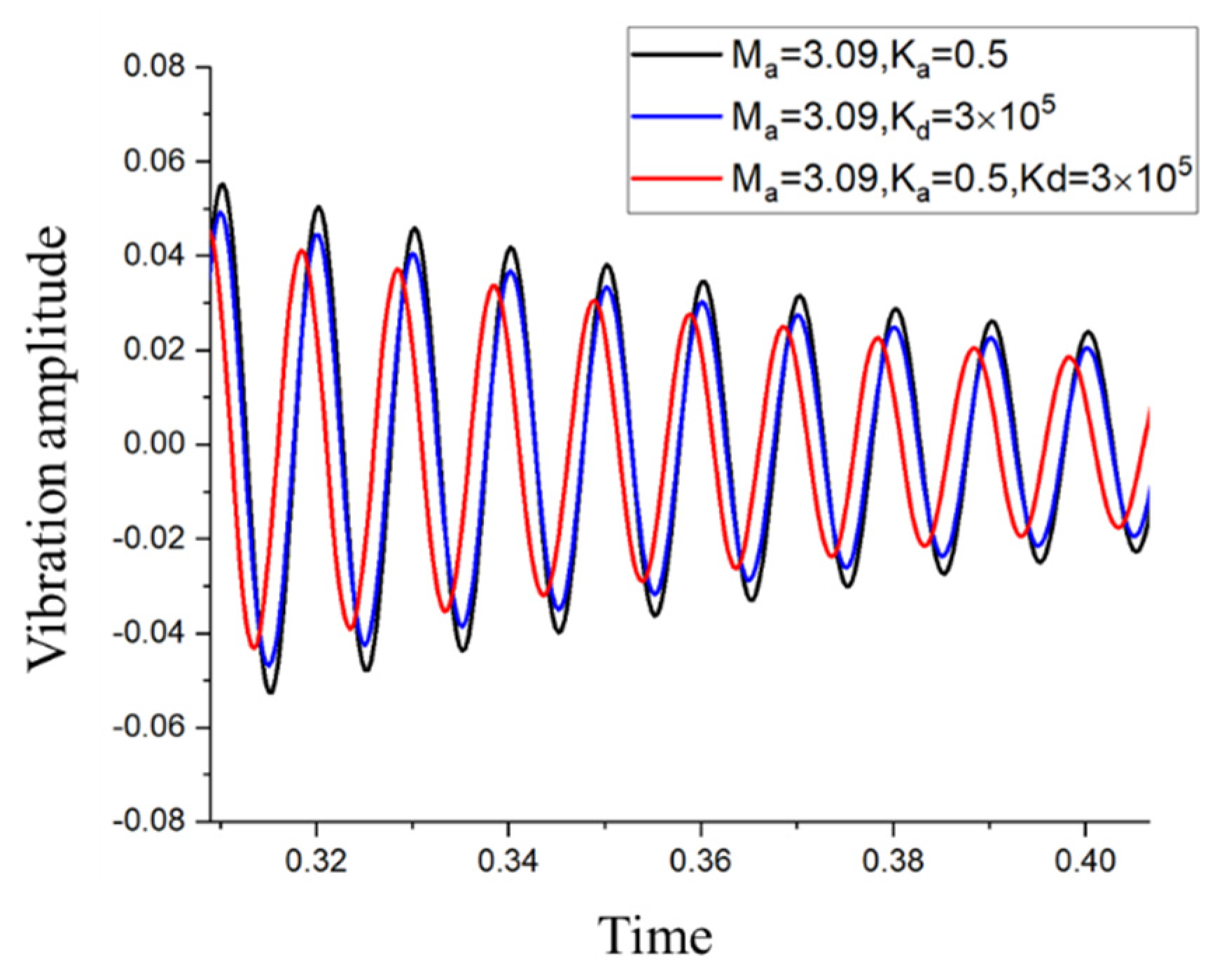
- The displacement and acceleration feedback control can cause the vibration response to reduce faster before the critical flutter point. The displacement and acceleration feedback control can effectively suppress the occurrence of flutter at the critical flutter point.
- (4)
- The combined control effect of active stiffness and active mass is better than considering only one of them.
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Prakash, T.; Ganapathi, M. Supersonic flutter characteristics of functionally graded flat panels including thermal effects. Compos. Struct. 2006, 72, 10–18. [Google Scholar] [CrossRef]
- Shin, W.H.; Oh, I.K.; Han, J.H.; Lee, I. Aeroelastic characteristics of cylindrical hybrid composite panels with viscoelastic damping treatments. J. Sound Vib. 2006, 296, 99–116. [Google Scholar] [CrossRef]
- Shin, W.H.; Oh, I.K.; Lee, I. Nonlinear flutter of aerothermally buckled composite shells with damping treatments. J. Sound Vib. 2009, 324, 556–569. [Google Scholar] [CrossRef]
- Chen, J.; Li, Q.S. Analysis of flutter and nonlinear dynamics of a composite laminated plate. Int. J. Struct. Stab. Dyn. 2016, 16, 1550019. [Google Scholar] [CrossRef]
- Chen, J.; Li, Q.S. Nonlinear aeroelastic flutter and dynamic response of composite laminated cylindrical shell in supersonic air flow. Compos. Struct. 2017, 168, 474–484. [Google Scholar] [CrossRef]
- Yang, X.D.; Yu, T.J.; Zhang, W.; Qian, Y.J.; Yao, M.H. Damping effect on supersonic panel flutter of composite plate with viscoelastic mid-layer. Compos. Struct. 2016, 137, 105–113. [Google Scholar] [CrossRef]
- Singha, M.K.; Mandal, M. Supersonic flutter characteristics of composite cylindrical panels. Compos. Struct. 2008, 82, 295–301. [Google Scholar] [CrossRef]
- Lin, H.G.; Shao, C.H.; Cao, D.Q. Nonlinear flutter and random response of composite panel embedded in shape memory alloy in thermal-aero-acoustic coupled field. Aerosp. Sci. Technol. 2020, 100, 105785. [Google Scholar] [CrossRef]
- Ferrari, G.; Amabili, M. Active vibration control of a sandwich plate by non-collocated positive position feedback. J. Sound Vib. 2015, 342, 44–56. [Google Scholar] [CrossRef]
- Zippo, A.; Ferrari, G.; Amabili, M.; Barbieri, M.; Pellicano, F. Active vibration control of a composite sandwich plate. Compos. Struct. 2015, 128, 100–114. [Google Scholar] [CrossRef]
- Lee, Y.S.; Vakakis, A.F.; Bergman, L.A.; McFarland, D.M.; Kerschen, G. Suppressing aeroelastic instability using broadband passive targeted energy transfers, Part 1: Theory. AIAA J. 2007, 45, 693–711. [Google Scholar] [CrossRef]
- Lee, Y.S.; Kerschen, G.; McFarland, D.M.; Hill, W.J.; Nichkawde, C.; Strganac, T.W.; Bergman, L.A.; Vakakis, A.F. Suppressing aeroelastic instability using broadband passive targeted energy transfers, part 2: Experiments. AIAA J. 2007, 45, 2391–2400. [Google Scholar] [CrossRef]
- Reddy, K.K.; Chen, J.; Behal, A.; Marzocca, P. Multi-input/multi-output adaptive output feedback control design for aeroelastic vibration suppression. J. Guid. Control Dyn. 2007, 30, 1040–1048. [Google Scholar] [CrossRef]
- Lu, S.F.; Jiang, Y.; Zhang, W.; Song, X.J. Vibration suppression of cantilevered piezoelectric laminated composite rectangular plate subjected to aerodynamic force in hygrothermal environment. Eur. J. Mech. Solids 2020, 83, 104002. [Google Scholar] [CrossRef]
- Na, S.; Librescu, L.; Kim, M.H.; Jeong, I.; Marzocca, P. Robust aeroelastic control of flapped wing systems using a sliding mode observer. Aerosp. Sci. Technol. 2006, 10, 120–126. [Google Scholar] [CrossRef]
- Na, S.S.; Librescu, L.; Marzocca, P.; Yoon, G.C.; Rubillo, C.; Bong, K. Robust aeroelastic control of two-dimensional supersonic flapped wing systems. Acta Mech. 2007, 192, 37–47. [Google Scholar] [CrossRef]
- Oveisi, A.; Nestorovic, T. Transient response of an active nonlinear sandwich piezolaminated plate. Commun. Nonlinear Sci. Numer. Simul. 2017, 45, 158–175. [Google Scholar] [CrossRef]
- Kasem, M.M.; Dowell, E.H. A study of the natural modes of vibration and aeroelastic stability of a plate with a piezoelectric material. Smart Mater. Struct. 2018, 27, 075043. [Google Scholar] [CrossRef]
- Li, F.M.; Chen, Z.B.; Cao, D.Q. Improving the aeroelastic flutter characteristics of supersonic beams using piezoelectric material. J. Intell. Mater. Syst. Struct. 2011, 22, 615–629. [Google Scholar] [CrossRef]
- Li, F.M.; Kishimoto, K.; Wang, Y.S.; Chen, Z.B.; Huang, A.H. Vibration control of beams with active constrained layer damping. Smart Mater. Struct. 2008, 17, 065036. [Google Scholar] [CrossRef]
- Li, F.M. Active aeroelastic flutter suppression of a supersonic plate with piezoelectric material. Int. J. Eng. Sci. 2012, 51, 190–203. [Google Scholar] [CrossRef]
- Song, Z.G.; Li, F.M.; Carrera, E.; Hagedorn, P. A new method of smart and optimal flutter control for composite laminated panels in supersonic airflow under thermal effects. J. Sound Vib. 2018, 414, 218–232. [Google Scholar] [CrossRef]
- Oh, I.K.; Lee, I. Supersonic flutter suppression of piezolaminated cylindrical panels based on multifield layerwise theory. J. Sound Vib. 2006, 291, 1186–1201. [Google Scholar] [CrossRef]
- Xue, Y.; Li, J.Q.; Li, F.M.; Song, Z.G. Active control of plates made of functionally graded piezoelectric material subjected to thermo-electro-mechanical loads. Int. J. Struct. Stab. Dyn. 2019, 19, 1950107. [Google Scholar] [CrossRef]
- Moon, S.H.; Hwang, J.S. Panel flutter suppression with an optimal controller based on the nonlinear model using piezoelectric materials. Compos. Struct. 2005, 68, 371–379. [Google Scholar] [CrossRef]
- Otiefy, R.A.H.; Negm, H.M. Wing box transonic-flutter suppression using piezoelectric self-sensing actuators attached to skin. Smart Mater. Struct. 2010, 19, 125001. [Google Scholar] [CrossRef]
- Potts, J.R.; Dreyer, D.R.; Bielawski, C.W.; Ruoff, R.S. Graphene-based polymer nanocomposites. Polymer 2011, 52, 5–25. [Google Scholar] [CrossRef] [Green Version]
- Rafiee, M.A.; Rafiee, J.; Yu, Z.Z.; Koratkar, N. Buckling resistant graphene nanocomposites. Appl. Phys. Lett. 2009, 95, 223103. [Google Scholar] [CrossRef]
- Rafiee, M.A.; Rafiee, J.; Wang, Z.; Song, H.H.; Yu, Z.Z.; Koratkar, N. Enhanced mechanical properties of nanocomposites at low graphene content. ACS Nano 2009, 3, 3884–3890. [Google Scholar] [CrossRef] [PubMed]
- Rafiee, M.A.; Rafiee, J.; Srivastava, I.; Wang, Z.; Song, H.H.; Yu, Z.Z.; Koratkar, N. Fracture and fatigue in graphene nanocomposites. Small 2010, 6, 179–183. [Google Scholar] [CrossRef] [PubMed]
- Montazeri, A.; Rafii-Tabar, H. Multiscale modeling of graphene- and nanotube-based reinforced polymer nanocomposites. Phys. Lett. A 2011, 375, 4034–4040. [Google Scholar] [CrossRef]
- Mortazavi, B.; Benzerara, O.; Meyer, H.; Bardon, J.; Ahzi, S. Combined molecular dynamics-finite element multiscale modeling of thermal conduction in graphene epoxy nanocomposites. Carbon 2013, 60, 356–365. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, J.H.; Dai, W.; Song, Y.Z.; Wang, D.; Zeng, L.M.; Jiang, N. Enhanced Thermal and Electrical Properties of Epoxy Composites Reinforced With Graphene Nanoplatelets. Polym. Compos. 2015, 36, 556–565. [Google Scholar] [CrossRef]
- Yang, J.; Wu, H.L.; Kitipornchai, S. Buckling and postbuckling of functionally graded multilayer graphene platelet-reinforced composite beams. Compos. Struct. 2017, 161, 111–118. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.Z.; Drzal, L.T.; Qin, Y.; Huang, Z.X. Mechanical properties and thermal conductivity of graphene nanoplatelet/epoxy composites. J. Mater. Sci. 2015, 50, 1082–1093. [Google Scholar] [CrossRef]
- Song, M.T.; Yang, J.; Kitipornchai, S.; Zhu, W.D. Buckling and postbuckling of biaxially compressed functionally graded multilayer graphene nanoplatelet-reinforced polymer composite plates. Int. J. Mech. Sci. 2017, 131, 345–355. [Google Scholar] [CrossRef] [Green Version]
- Song, M.T.; Kitipornchai, S.; Yang, J. Free and forced vibrations of functionally graded polymer composite plates reinforced with graphene nanoplatelets. Compos. Struct. 2017, 159, 579–588. [Google Scholar] [CrossRef]
- Lin, H.G.; Cao, D.Q.; Xu, Y.Q. Vibration, buckling and aeroelastic analyses of functionally graded multilayer graphene-nanoplatelets-reinforced composite plates embedded in piezoelectric layers. Int. J. Appl. Mech. 2018, 10, 1850023. [Google Scholar] [CrossRef]
- Saidi, A.R.; Bahaadini, R.; Majidi-Mozafari, K. On vibration and stability analysis of porous plates reinforced by graphene platelets under aerodynamical loading. Compos. Part B-Eng. 2019, 164, 778–799. [Google Scholar] [CrossRef]
- Zhou, X.P.; Wang, Y.W.; Zhang, W. Vibration and flutter characteristics of GPL-reinforced functionally graded porous cylindrical panels subjected to supersonic flow. Acta Astronaut. 2021, 183, 89–100. [Google Scholar] [CrossRef]
- Kumar, K.R.; Narayanan, S. Active vibration control of beams with optimal placement of piezoelectric sensor/actuator pairs. Smart Mater. Struct. 2008, 17, 055008. [Google Scholar] [CrossRef]
- Kim, H.W.; Kim, J.H. Effect of piezoelectric damping layers on the dynamic stability of plate under a thrust. J. Sound Vib. 2005, 284, 597–612. [Google Scholar] [CrossRef]
- Koo, K.N.; Hwang, W.S. Effects of hysteretic and aerodynamic damping on supersonic panel flutter of composite plates. J. Sound Vib. 2004, 273, 569–583. [Google Scholar] [CrossRef]
- Kumar, P.; Srinivas, J. Vibration, buckling and bending behavior of functionally graded multi walled carbon nanotube reinforced polymer composite plates using the layer-wise formulation. Compos. Struct. 2017, 177, 158–170. [Google Scholar] [CrossRef]
- Liu, C.; Ye, Z.Y. Aerodynamic nonlinearity for surface vibration in supersonic flow. Acta Aerodyn. Sin. 2018, 36, 1027–1033. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern | Source | |||||
|---|---|---|---|---|---|---|
| 1,1 | 2,1 | 2,2 | 3,1 | 3,2 | ||
| Epoxy polymer | Song et al. | 0.0584 | 0.1391 | 0.2132 | 0.2595 | 0.3251 |
| ANSYS | 0.0563 | 0.1361 | 0.2064 | 0.2569 | 0.3173 | |
| Present | 0.0587 | 0.1406 | 0.2164 | 0.2641 | 0.3321 | |
| X-GPLs | Song et al. | 0.1378 | 0.3249 | 0.4939 | 0.5984 | 0.7454 |
| ANSYS | 0.1319 | 0.3043 | 0.4424 | 0.5657 | 0.6475 | |
| Present | 0.1385 | 0.3289 | 0.5028 | 0.6112 | 0.7645 | |
| O-GPLs | Song et al. | 0.102 | 0.2456 | 0.3796 | 0.4645 | 0.586 |
| ANSYS | 0.0881 | 0.2162 | 0.3336 | 0.4166 | 0.5658 | |
| Present | 0.1023 | 0.2472 | 0.3835 | 0.4702 | 0.5949 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Han, R.; Liu, D.; Zhang, W. Active Flutter Suppression and Aeroelastic Response of Functionally Graded Multilayer Graphene Nanoplatelet Reinforced Plates with Piezoelectric Patch. Appl. Sci. 2022, 12, 1244. https://0-doi-org.brum.beds.ac.uk/10.3390/app12031244
Chen J, Han R, Liu D, Zhang W. Active Flutter Suppression and Aeroelastic Response of Functionally Graded Multilayer Graphene Nanoplatelet Reinforced Plates with Piezoelectric Patch. Applied Sciences. 2022; 12(3):1244. https://0-doi-org.brum.beds.ac.uk/10.3390/app12031244
Chicago/Turabian StyleChen, Jie, Ruofan Han, Dekun Liu, and Wei Zhang. 2022. "Active Flutter Suppression and Aeroelastic Response of Functionally Graded Multilayer Graphene Nanoplatelet Reinforced Plates with Piezoelectric Patch" Applied Sciences 12, no. 3: 1244. https://0-doi-org.brum.beds.ac.uk/10.3390/app12031244