
Adaptive Sliding Mode Control Integrating with RBFNN for Proton Exchange Membrane Fuel Cell Power Conditioning



Abstract
:1. Introduction
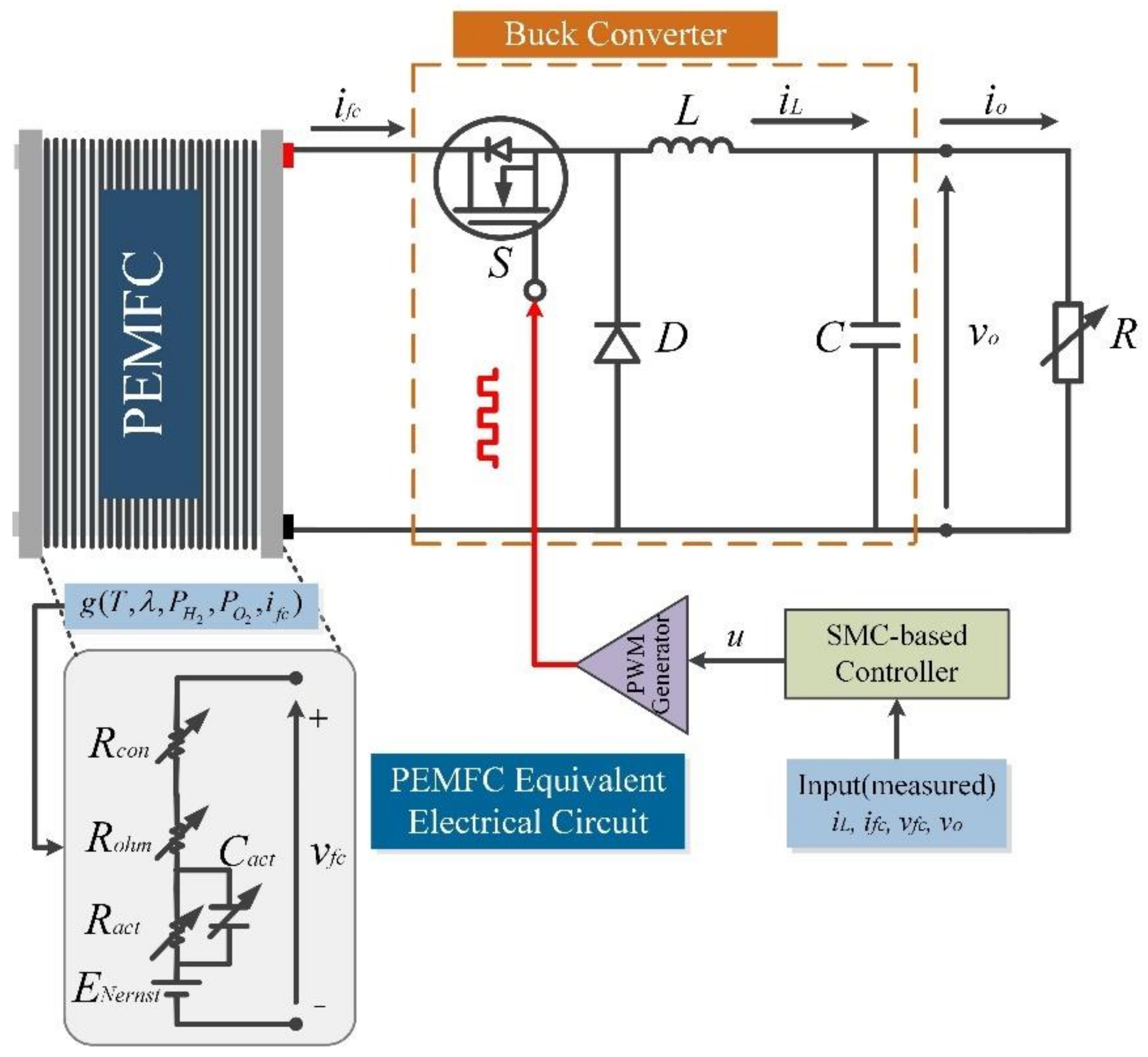
2. PEMFC Power Supply Modeling
2.1. Model of PEMFC
2.2. Model of PEMFC Power Supply System
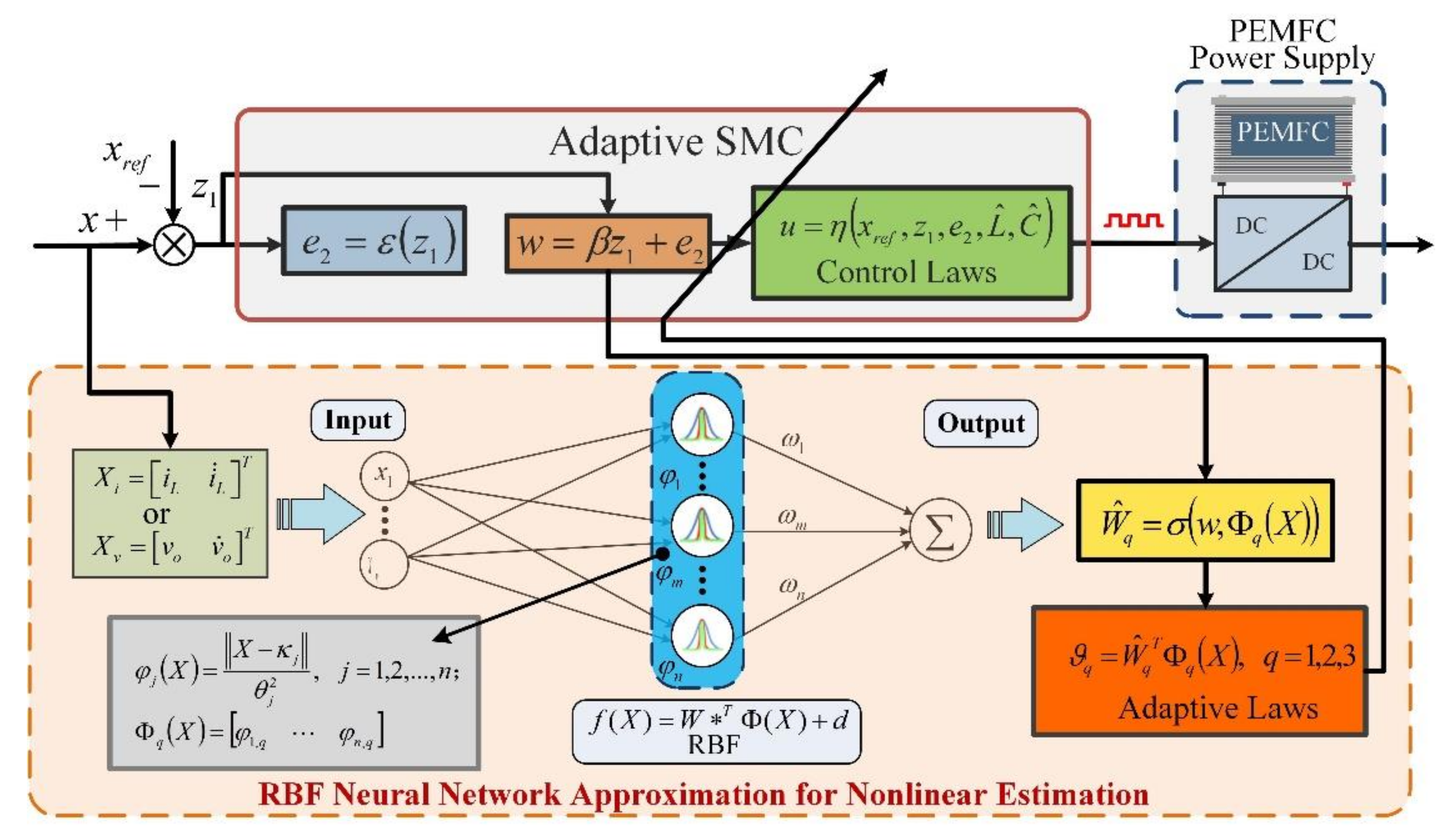
3. Adaptive Control of PEMFC Power Supply
3.1. Model of PEMFC
3.2. Adaptive SMC Design
3.3. RBFNN Estimation
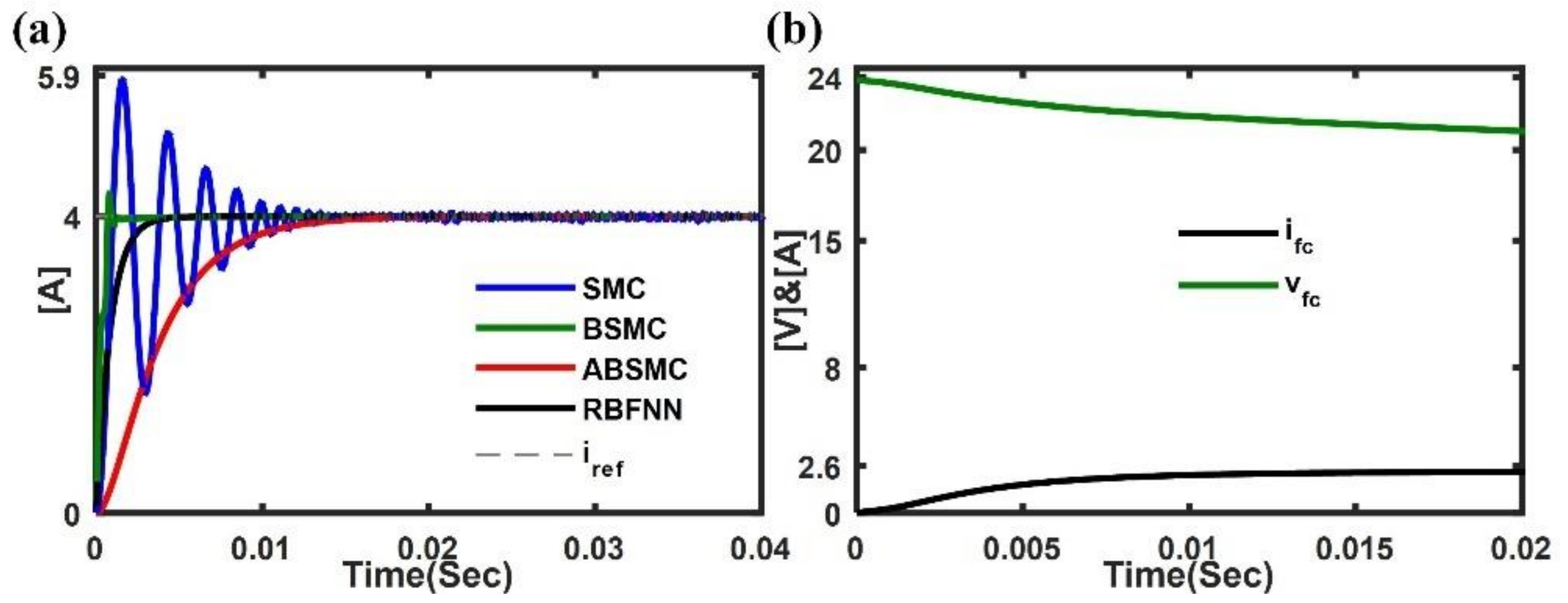
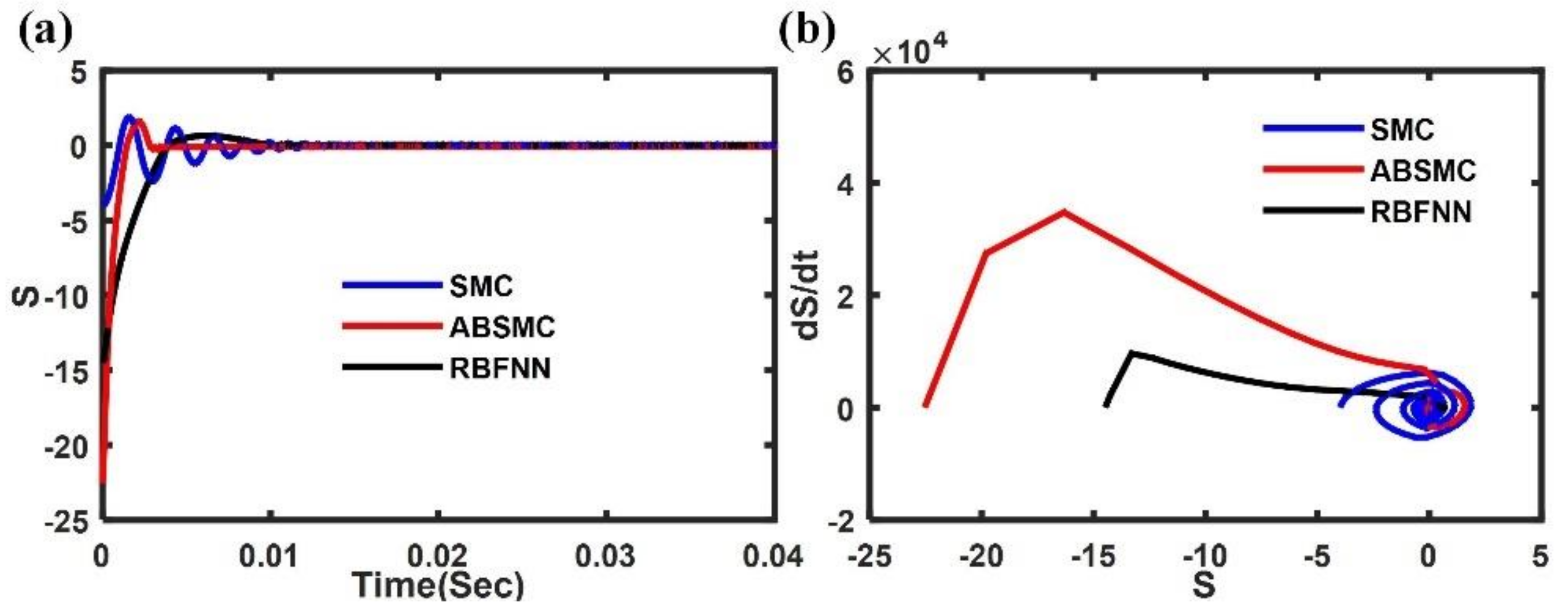
4. Simulation and Discussion
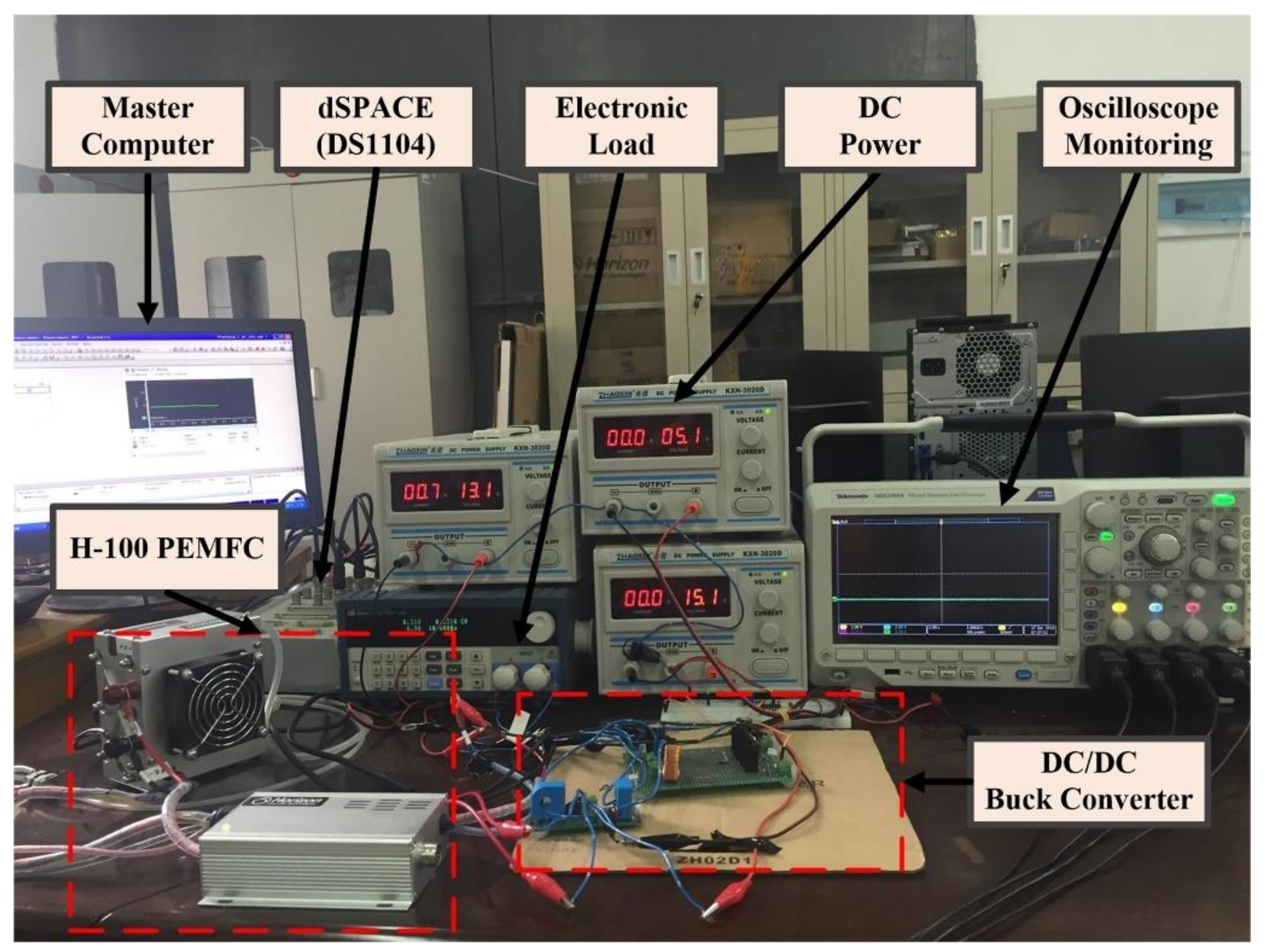
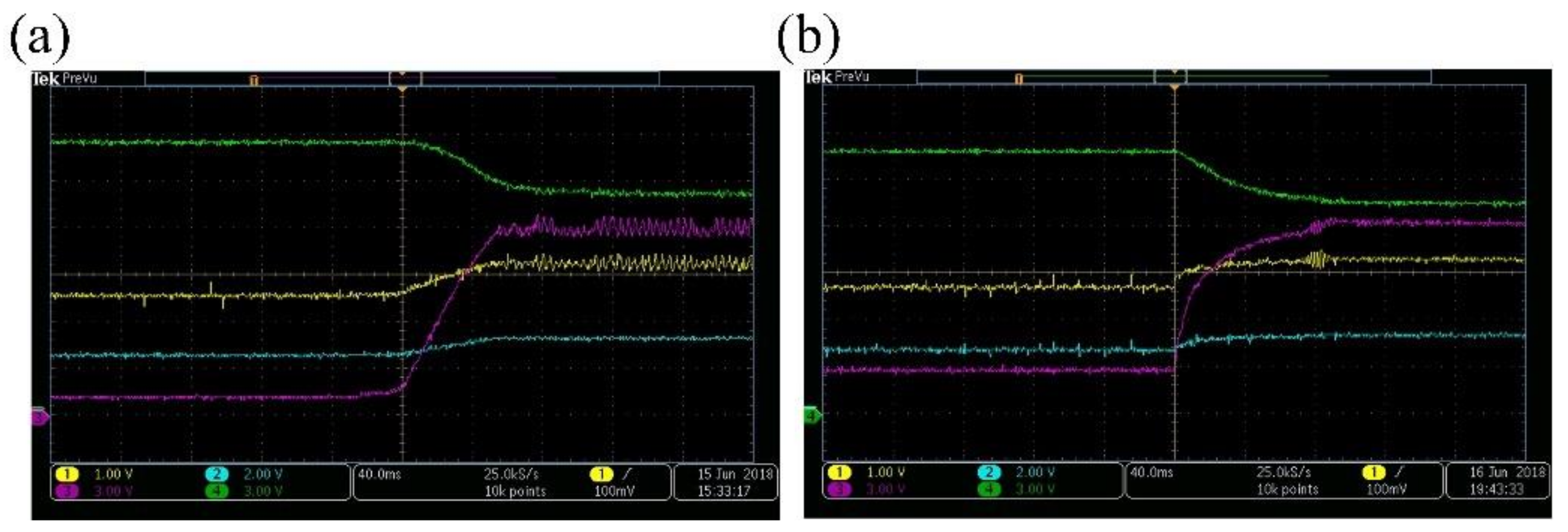
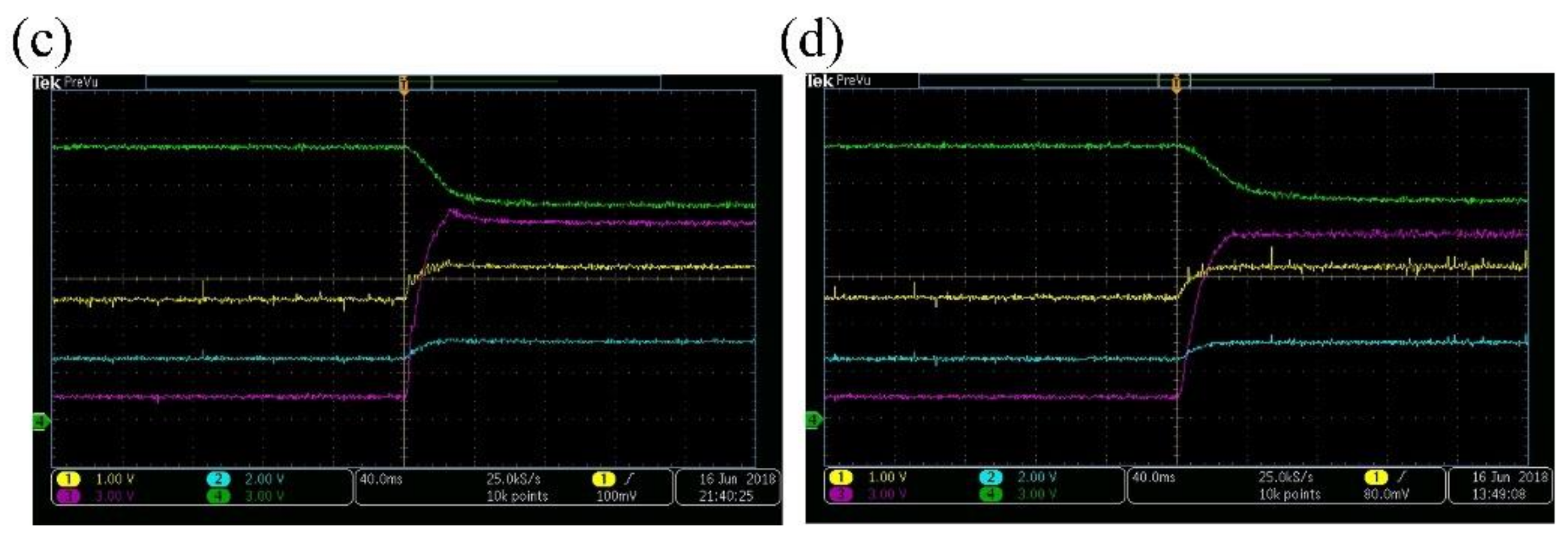
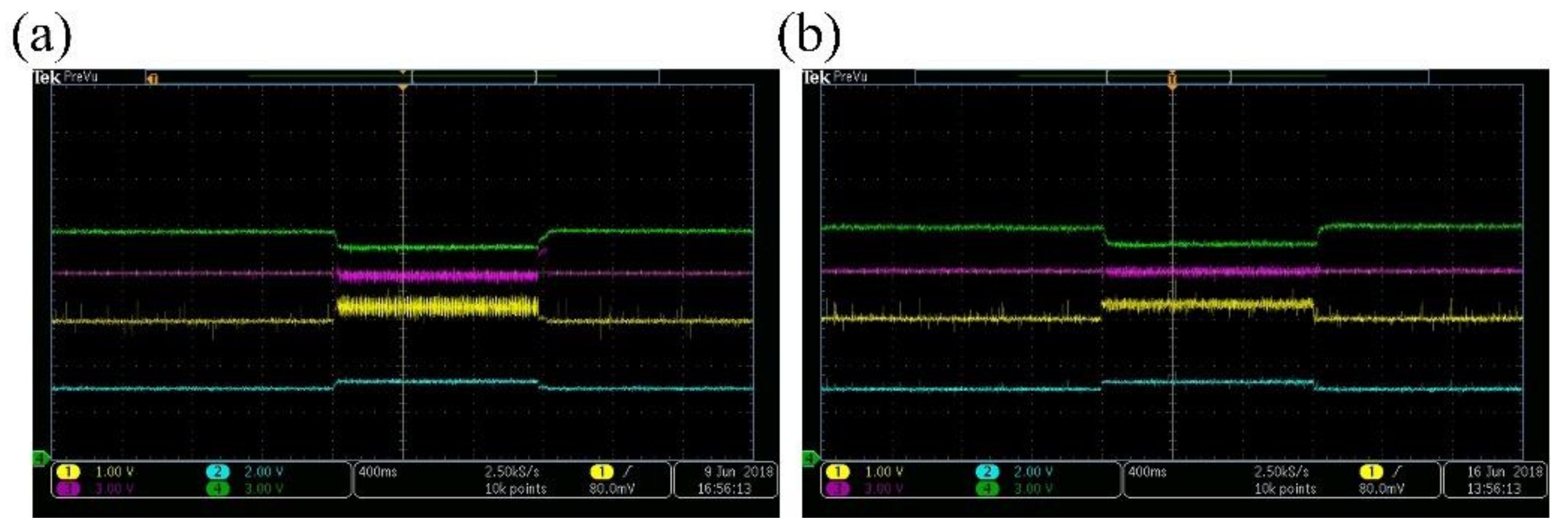
5. Experimental Validation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| v | Voltage (V) |
| i | Current (A) |
| λ | Average water content |
| P | Pressure (Pa) |
| T | Temperature (K) |
| C | Capacity (F) |
| R | Resistance (Ω) |
| L | Inductance (H) |
| u | Control law |
| p | Virtual control values |
| A | Lyapunov function |
| B | Lyapunov function |
| W | Weight |
| Subscripts | |
| 0 | Nominal value |
| act | Activation |
| Air | Air |
| C | Capacitor |
| con | Concentration |
| ohm | Ohmic |
| fc | Fuel cell |
| H2 | Hydrogen |
| i | Used in current regulating |
| O2 | Oxygen |
| ref | Reference |
| v | Used in voltage regulating |
References
- Chatrattanawet, N.; Hakhen, T.; Kheawhom, S.; Arpornwichanop, A. Control structure design and robust model predictive control for controlling a proton exchange membrane fuel cell. J. Clean. Prod. 2017, 148, 934–947. [Google Scholar] [CrossRef]
- Harrag, A.; Messalti, S. How fuzzy logic can improve PEM fuel cell MPPT performances. Int. J. Hydrog. Energy 2018, 43, 537–550. [Google Scholar] [CrossRef]
- Giaouris, D.; Stergiopoulos, F.; Ziogou, C.; Banerjee, S.; Zahawi, B.; Pickert, V.; Voutetakis, S.; Papadopoulou, S. Nonlinear stability analysis and a new design methodology for a PEM fuel cell fed DC–DC boost converter. Int. J. Hydrog. Energy 2012, 37, 18205–18215. [Google Scholar] [CrossRef]
- Wang, Y.X.; Yu, D.H.; Chen, S.A.; Kim, Y.B. Robust DC/DC converter control for polymer electrolyte membrane fuel cell application. J. Power Sources 2014, 261, 292–305. [Google Scholar] [CrossRef]
- Debenjak, A.; Petrovčič, J.; Boškoski, P.; Musizza, B.; Juričić, Đ. Fuel cell condition monitoring system based on interconnected DC–DC converter and voltage monitor. IEEE Trans. Ind. Electron. 2017, 62, 5293–5305. [Google Scholar] [CrossRef]
- Valdez-Resendiz, J.; Rosas-Caro, V.S.J.; Maldonado, M.; Sierra, J.; Barbosa, R. Continuous input-current buck-boost DC-DC converter for PEM fuel cell applications. Int. J. Hydrog. Energy 2017, 42, 30389–30399. [Google Scholar] [CrossRef]
- Sun, F.; Xiong, R.; He, H. A systematic state-of-charge estimation framework for multi-cell battery pack in electric vehicles using bias correction technique. Appl. Energy 2016, 162, 1399–1409. [Google Scholar] [CrossRef]
- Wang, Y.X.; Ou, K.; Kim, Y.B. Modeling and experimental validation of hybrid proton exchange membrane fuel cell/battery system for power management control. Int. J. Hydrog. Energy 2015, 40, 11713–11721. [Google Scholar] [CrossRef]
- Afsharinejad, A.; Asemani, M.H.; Dehghani, M.; Abolpour, R.; Vafamand, N. Optimal gain-scheduling control of proton exchange membrane fuel cell: An LMI approach. IET Renew. Power Gener. 2022, 16, 459–469. [Google Scholar] [CrossRef]
- Bayram, M.B.; Sefa, I.; Balci, S. A static exciter with interleaved buck converter for synchronous generators. Int. J. Hydrog. Energy 2017, 42, 17760–17770. [Google Scholar] [CrossRef]
- Wang, Y.X.; Ou, K.; Kim, Y.B. Power source protection method for hybrid polymer electrolyte membrane fuel cell/lithium-ion battery system. Renew. Energy 2017, 111, 381–391. [Google Scholar] [CrossRef]
- Lian, K.Y.; Liou, J.J.; Huang, C.Y. LMI-based integral fuzzy control of DC-DC converters. IEEE Trans. Fuzzy Syst. 2006, 14, 71–80. [Google Scholar] [CrossRef]
- Sumsurooah, S.; Odavic, M.; Bozhko, S.; Boroyevich, D. Robust stability analysis of a DC/DC buck converter under multiple parametric uncertainties. IEEE Trans. Power Electron. 2017, 33, 5426–5441. [Google Scholar] [CrossRef] [Green Version]
- Olalla, C.; Leyva, R.; El Aroudi, A.; Queinnec, I. Robust LQR control for PWM converters: An LMI approach. IEEE Trans. Ind. Electron. 2009, 56, 2548–2558. [Google Scholar] [CrossRef]
- Geyer, T.; Papafotiou, G.; Morari, M. Hybrid model predictive control of the step-down DC–DC converter. IEEE Trans. Control Syst. Technol. 2008, 16, 1112–1124. [Google Scholar] [CrossRef]
- Liu, Z.; Xie, L.; Lu, S.; Bemporad, A. Fast linear parameter varying model predictive control of buck DC–DC converters based on FPGA. IEEE Access 2018, 6, 52434–52446. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.; Yang, J.; Wu, B.; Li, Q. Extended state observer-based sliding mode control for PWM-based DC–DC buck power converter systems with mismatched disturbances. IET Control Theory Appl. 2015, 9, 579–586. [Google Scholar] [CrossRef]
- Ahmeid, M.; Armstrong, M.; Gadoue, S.; Gadoue, S.; Algreer, M.; Missailidis, P. Real-time parameter estimation of DC–DC converters using a self-tuned Kalman filter. IEEE Trans. Power Electron. 2016, 32, 5666–5674. [Google Scholar] [CrossRef] [Green Version]
- Ding, S.; Zheng, W.-X.; Sun, J.; Wang, J. Second-order sliding-mode controller design and its implementation for buck converters. IEEE Trans. Ind. Inform. 2017, 14, 1990–2000. [Google Scholar] [CrossRef]
- Ma, R.; Wu, Y.; Breaz, E.; Huangfu, Y.; Briois, P.; Gao, F. High-order sliding mode control of DC–DC converter for PEM fuel cell applications. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Portland, OR, USA, 23–27 September 2018; pp. 1–7. [Google Scholar]
- Hernández-Méndez, A.; Linares-Flores, J.; Sira-Ramírez, H.; Guerrero-Castellanos, J.F.; Mino-Aguilar, G. A backstepping approach to decentralized active disturbance rejection control of interacting boost converters. IEEE Trans. Ind. Appl. 2017, 53, 4063–4072. [Google Scholar] [CrossRef]
- Fehr, H.; Gensior, A. On trajectory planning, backstepping controller design and sliding modes in active front-ends. IEEE Trans. Power Electron. 2016, 31, 6044–6056. [Google Scholar] [CrossRef]
- Sker, M.; Zergeroglu, E. Nonlinear control of flyback type DC to DC Converters: An indirect backstepping approach. In Proceedings of the 2011 IEEE International Conference on Control Applications (CCA), Denver, CO, USA, 28–30 September 2011; pp. 65–69. [Google Scholar]
- Dahech, K.; Allouche, M.; Damak, T.; Tadeo, F. Backstepping sliding mode control for maximum power point tracking of a photovoltaic system. Electr. Power Syst. Res. 2017, 143, 182–188. [Google Scholar] [CrossRef]
- Salimi, M.; Soltani, J.; Markadeh, G.A.; Abjadi, N.R. Indirect output voltage regulation of DC–DC buck/boost converter operating in continuous and discontinuous conduction modes using adaptive backstepping approach. IET Power Electron. 2013, 6, 732–741. [Google Scholar] [CrossRef] [Green Version]
- McIntyre, M.L.; Schoen, M.; Latham, J. Simplified adaptive backstepping control of buck DC:DC converter with unknown load. In Proceedings of the 2013 IEEE 14th Workshop on Control and Modeling for Power Electronics (COMPEL), Salt Lake City, UT, USA, 23–26 June 2013; pp. 1–7. [Google Scholar]
- Nizami, T.K.; Chakravarty, A.; Mahanta, C. Analysis and experimental investigation into a finite time current observer based adaptive backstepping control of buck converters. J. Frankl. Inst. 2018, 355, 4996–5017. [Google Scholar] [CrossRef]
- Zuniga-Ventura, Y.A.; Langarica-Cordoba, D.; Leyva-Ramos, J.; Diaz-Saldierna, L.H.; Ramírez-Rivera, V.M. Adaptive backstepping control for a fuel cell/boost converter system. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 686–695. [Google Scholar] [CrossRef]
- Wang, C.; Tian, H. Research on Control Strategy of Interleaved BUCK Circuit Based on BP Neural Network Model. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; pp. 2009–2013. [Google Scholar]
- Zhang, L.; Chen, K.; Chi, S.; Lyu, L.; Ma, H.; Wang, K. The Bidirectional DC/DC Converter Operation Mode Control Algorithm Based on RBF Neural Network. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2138–2143. [Google Scholar]
- Jin, H.; Zhao, X. Complementary sliding mode control via elman neural network for permanent magnet linear servo system. IEEE Access 2019, 7, 82183–82193. [Google Scholar] [CrossRef]
- Chu, Y.; Hou, S.; Fei, J. Continuous terminal sliding mode control using novel fuzzy neural network for active power filter. Control Eng. Pract. 2021, 109, 104735. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Laghrouche, S.; N’Diaye, A.; Cirrincione, M. Hermite neural network-based second-order sliding-mode control of synchronous reluctance motor drive systems. J. Frankl. Inst. 2021, 358, 400–427. [Google Scholar] [CrossRef]
- Peng, C.; Bai, Y.; Gong, X.; Gao, Q.; Zhao, C.; Tian, Y. Modeling and robust backstepping sliding mode control with adaptive RBFNN for a novel coaxial eight-rotor UAV. IEEE/CAA J. Autom. Sin. 2015, 2, 56–64. [Google Scholar]
- Fu, C.; Hong, W.; Lu, H.; Zhang, L.; Guo, X.; Tian, Y. Adaptive robust backstepping attitude control for a multi-rotor unmanned aerial vehicle with time-varying output constraints. Aerosp. Sci. Technol. 2018, 78, 593–603. [Google Scholar] [CrossRef]
- Xu, D.; Liu, J.; Yan, X.-G.; Yan, W. A novel adaptive neural network constrained control for a multi-area interconnected power system with hybrid energy storage. IEEE Trans. Ind. Electron. 2018, 65, 6625–6634. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, C.; Zhu, Y.; He, S.; Yang, K.; Zhang, M. Neural network learning adaptive robust control of an industrial linear motor-driven stage with disturbance rejection ability. IEEE Trans. Ind. Inf. 2017, 13, 2172–2183. [Google Scholar] [CrossRef]
- Zeng, X.; Li, Z.; Wan, J.; Zhang, J.; Ren, M.; Gao, W.; Li, Z.; Zhang, B. Embedded hardware artificial neural network control for global and real-time imbalance current suppression of parallel connected IGBTs. IEEE Trans. Ind. Electron. 2019, 67, 2186–2196. [Google Scholar] [CrossRef]
- Chi, X.; Quan, S.; Chen, J.; Wang, Y.-X.; He, H. Proton exchange membrane fuel cell-powered bidirectional DC motor control based on adaptive sliding-mode technique with neural network estimation. Int. J. Hydrog. Energy 2020, 45, 20282–20292. [Google Scholar] [CrossRef]
- Srinivasan, S.; Tiwari, R.; Krishnamoorthy, M.; Lalitha, M.P.; Raj, K.K. Neural network based MPPT control with reconfigured quadratic boost converter for fuel cell application. Int. J. Hydrog. Energy 2021, 46, 6709–6719. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategy for a series–parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]
- Yan, M.; Li, M.; He, H.; Peng, J.; Sun, C. Rule-based energy management for dual-source electric buses extracted by wavelet transform. J. Clean. Prod. 2018, 189, 116–127. [Google Scholar] [CrossRef]
- Utkin, V. Sliding mode control of DC/DC converters. J. Frankl. Inst. 2013, 350, 2146–2165. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| PEMFC power (Pfc) | 100 | W |
| Number of cells (N) | 20 | - |
| Thickness of the membrane (lfc) | 0.0178 | cm |
| Area of the membrane (Afc) | 22.5 | cm2 |
| Inductor (L0) | 470 | mH |
| Capacitor (C0) | 1000 | μF |
| Constant resistance (R0) | 2.05 × 10−2 | Ω |
| Test Conditions | Parameters with Time | |
|---|---|---|
| Setpoints | Load Resistor | |
| Condition 1: current transient response | iL,ref = 4 A | R = 3 Ω |
| Condition 2: step response for different current | iL,ref = 2 A @ [4,6] s; iL,ref = 4 A at other time | R = 3 Ω |
| Condition 3: step response for different voltage | vo,ref = 8 V @ [4,6] s; vo,ref = 12 V at other time | R = 3 Ω |
| Condition 4: disturbance injection in current control | iL,ref = 4 A | R = 0.5 Ω @ [0.88, 2.2] s; R = 2 Ω at other time |
| Condition 5: disturbance injection in voltage control | vo,ref = 12 V | R = 3 Ω @ [1.6, 2.8] s; R = 5 Ω at other time |
| Conditions | Methods | Settling Time (s) | RSME | ||
|---|---|---|---|---|---|
| Current | Voltage | Current | Voltage | ||
| Condition 1 | ABSMC | 0.014 | / | 0.6317 | / |
| RBFNN | 0.003 | / | 0.2836 | / | |
| Condition 2 | ABSMC | 0.003 | / | 0.0782 | / |
| RBFNN | 0.002 | / | 0.0232 | / | |
| Condition 3 | ABSMC | / | 0.012 | / | 0.1279 |
| RBFNN | / | 0.006 | / | 0.1216 | |
| Condition 4 | ABSMC | 0.015 | / | / | 0.0284 |
| RBFNN | 0.001 | / | / | 0.0284 | |
| Condition 5 | ABSMC | / | 0.010 | 0.2018 | / |
| RBFNN | / | 0.004 | 0.1794 | / | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, X.; Lv, J.; Chang, Y.; Chen, J.; He, H. Adaptive Sliding Mode Control Integrating with RBFNN for Proton Exchange Membrane Fuel Cell Power Conditioning. Appl. Sci. 2022, 12, 3132. https://0-doi-org.brum.beds.ac.uk/10.3390/app12063132
Xiao X, Lv J, Chang Y, Chen J, He H. Adaptive Sliding Mode Control Integrating with RBFNN for Proton Exchange Membrane Fuel Cell Power Conditioning. Applied Sciences. 2022; 12(6):3132. https://0-doi-org.brum.beds.ac.uk/10.3390/app12063132
Chicago/Turabian StyleXiao, Xuelian, Jianguo Lv, Yuhua Chang, Jinzhou Chen, and Hongwen He. 2022. "Adaptive Sliding Mode Control Integrating with RBFNN for Proton Exchange Membrane Fuel Cell Power Conditioning" Applied Sciences 12, no. 6: 3132. https://0-doi-org.brum.beds.ac.uk/10.3390/app12063132