
Fast 3D Analytical Affine Transformation for Polygon-Based Computer-Generated Holograms


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Conventional Polygon-Based Method
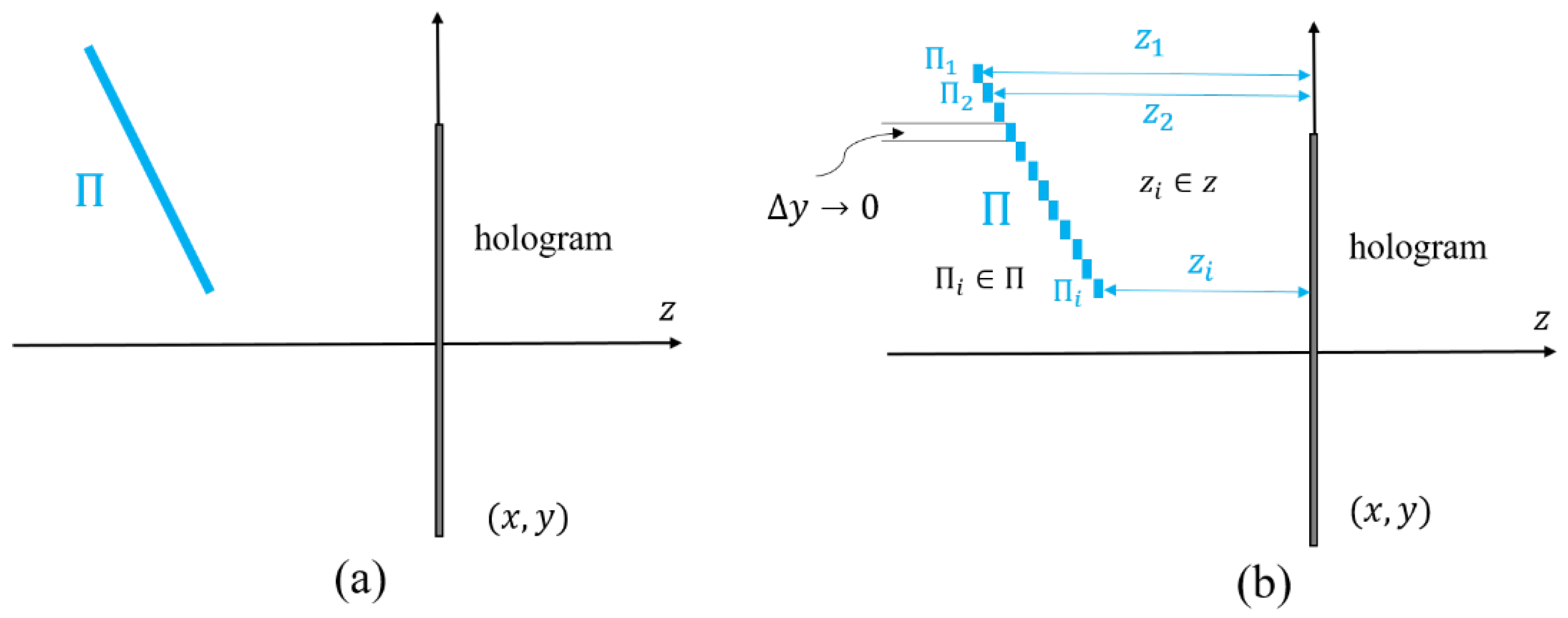
3. Theory
4. Simulations and Optical Experiment
4.1. Numerical Reconstruction
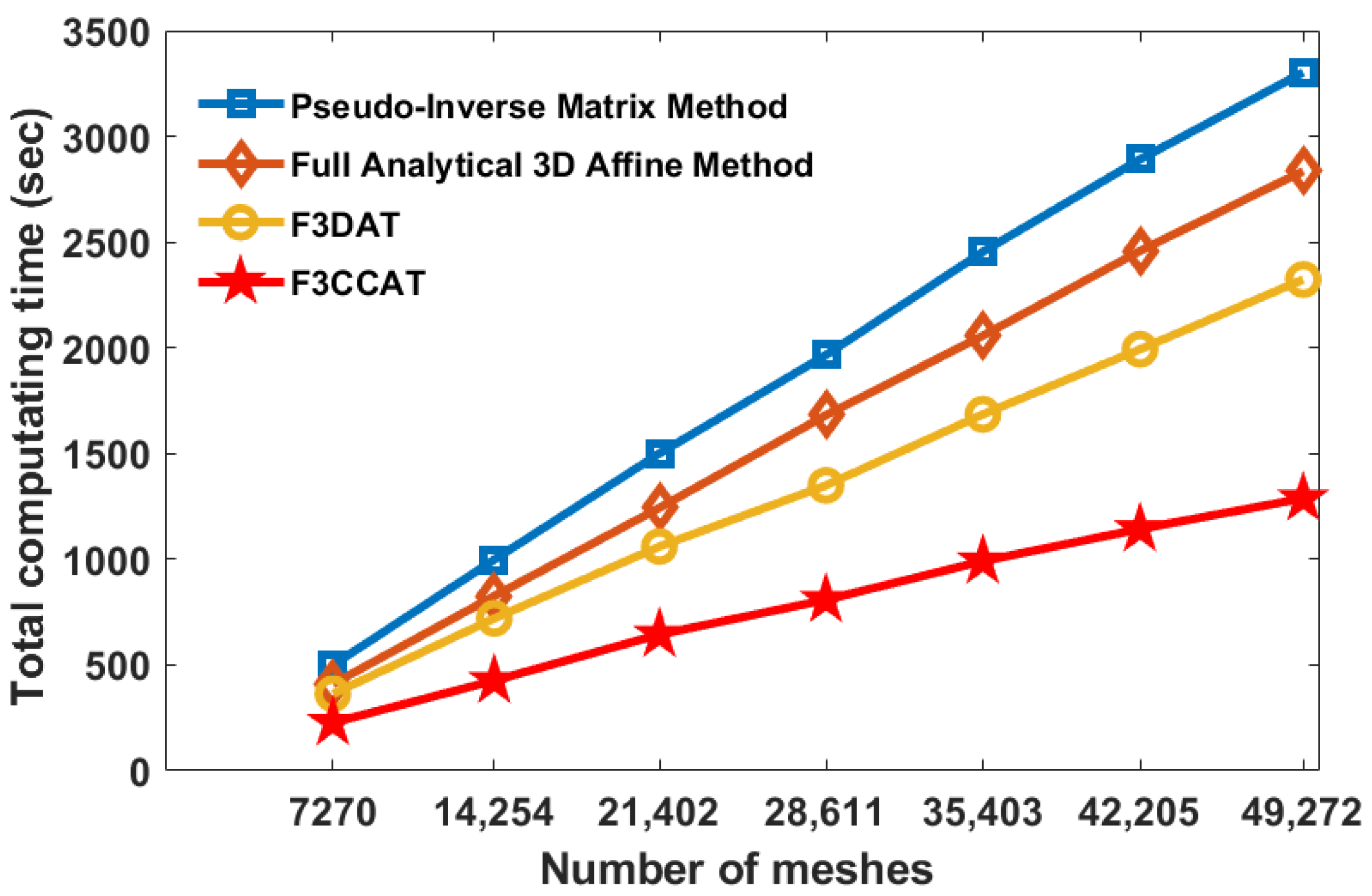
4.2. Comparison with Previous Methods
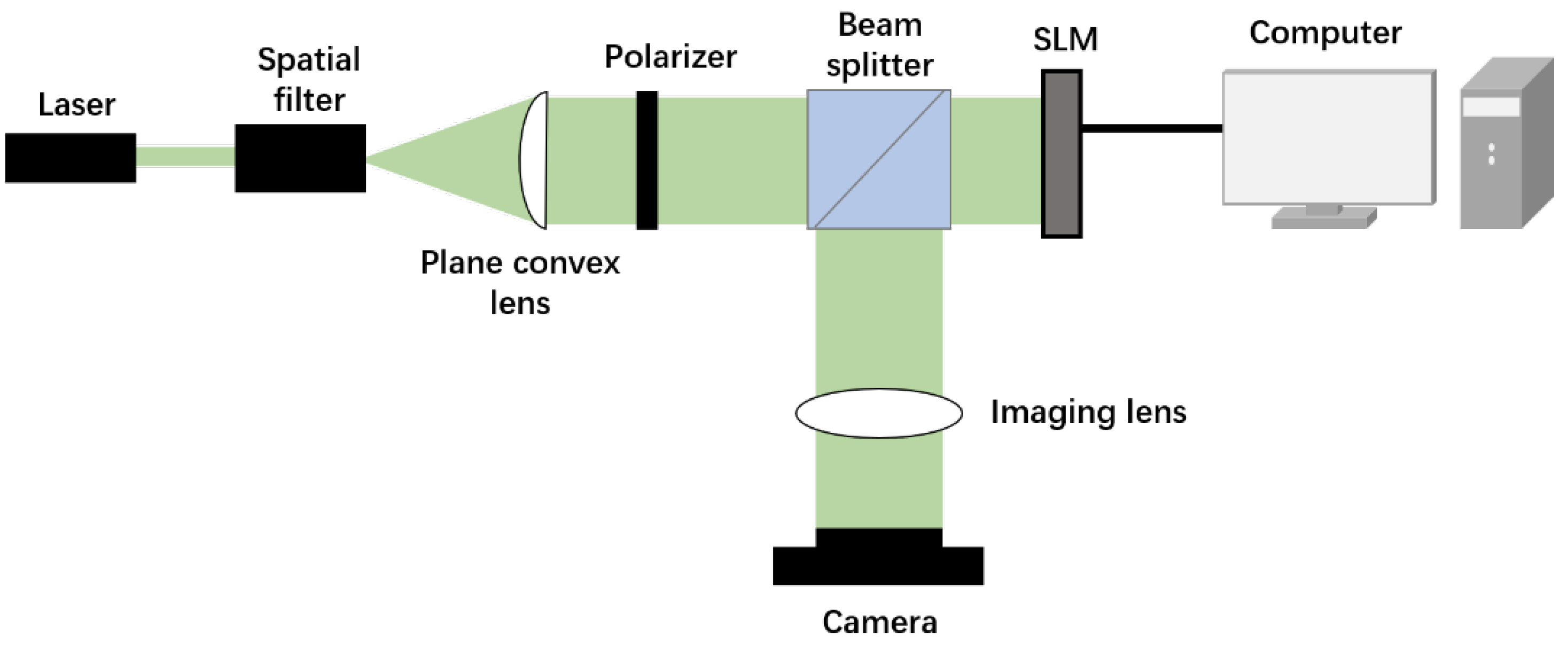
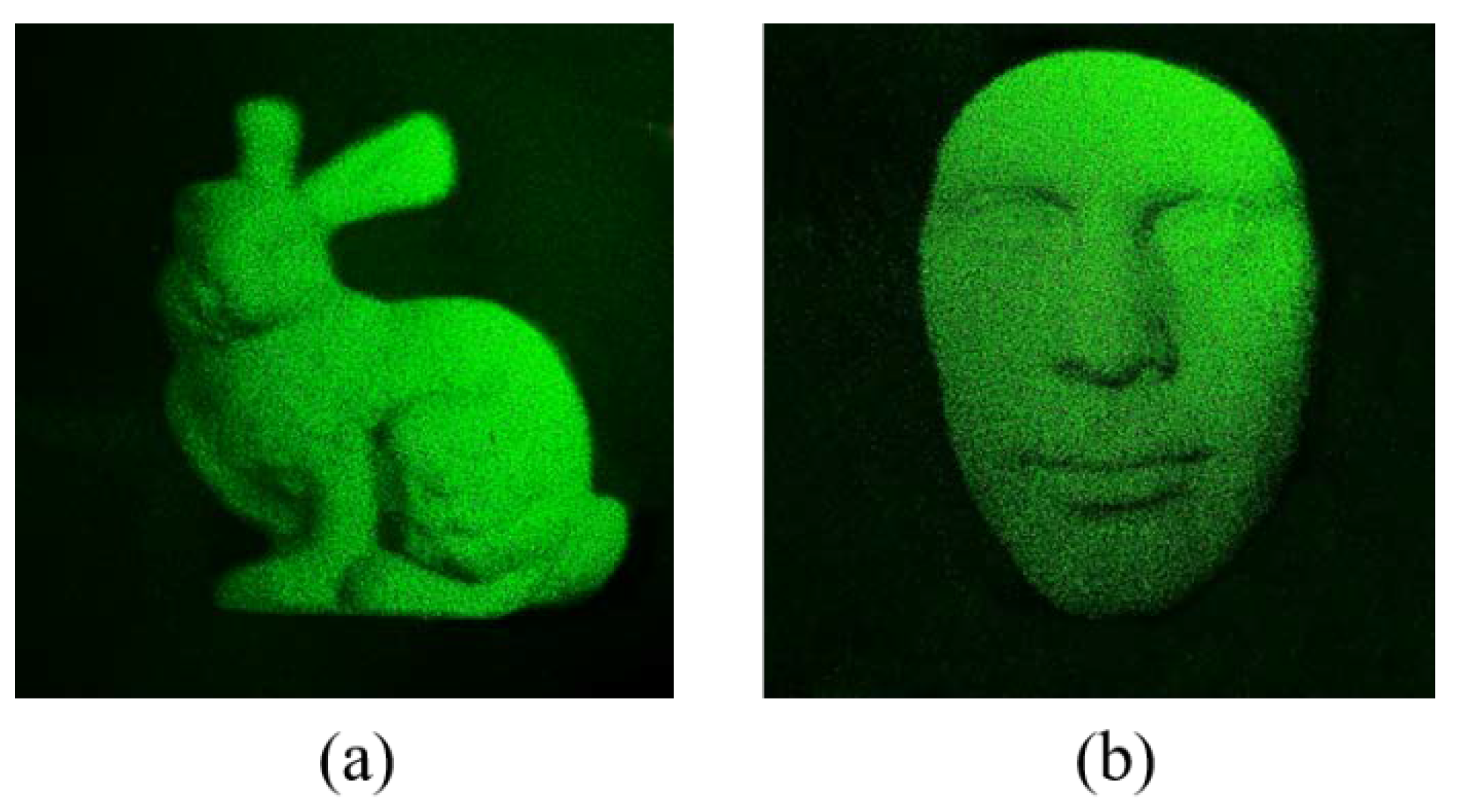
4.3. Optical Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Full Results of the Analytical Spectrum Expression of Primitive Triangle
Appendix B. Derivation of the Spectrum Distribution of Tilted Triangle on the Hologram Plane
Appendix C. Derivation of the Analytical Spectrum Expression of Tilted Triangle on the Hologram
References
- Jason, G. Three-dimensional display technologies. Adv. Opt. Photonics 2013, 5, 456–535. [Google Scholar]
- Liu, L.; Pang, L.; Teng, D. Super multi-view three-dimensional display technique for portable devices. Opt. Express 2016, 24, 4421–4430. [Google Scholar] [CrossRef] [PubMed]
- Hoffman, D.; Girshick, A.; Akeley, K.; Banks, M. Vergence-accommodation conflicts hinder visual performance and cause visual fatigue. J. Vis. 2008, 8, 1–30. [Google Scholar] [CrossRef]
- Smalley, D.; Nygaard, E.; Squire, K.; Wagoner, J.; Rasmussen, J.; Gneiting, S.; Qaderi, K.; Goodsell, J.; Rogers, W.; Lindsey, M. A photophoretic-trap volumetric display. Nature 2018, 553, 486–490. [Google Scholar] [CrossRef]
- Jung, J.; Kim, J.; Lee, B. Solution of pseudoscopic problem in integral imaging for real-time processing. Opt. Lett. 2013, 38, 76–78. [Google Scholar] [CrossRef]
- Poon, T.-C.; Liu, J.-P. Introduction to Modern Digital Holography with MATLAB; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Matsushima, K. Introduction to Computer Holography; Springer: New York, NY, USA, 2020; pp. 54–88. [Google Scholar]
- Zhang, Y.; Fan, H.-X.; Wang, F.; Gu, F.; Qian, X.; Poon, T.-C. Polygon-based computer-generated holography: A review of fundamentals and recent progress [Invited]. Appl. Opt. 2021, 61, B363–B374. [Google Scholar] [CrossRef]
- Wang, Z.; Lv, G.; Feng, Q.; Wang, A.; Ming, G. Resolution Priority Holographic Stereogram Based on Integral Imaging with Enhanced Depth Range. Opt. Express 2019, 27, 2689–2702. [Google Scholar] [CrossRef]
- Zhang, X.; Lv, G.; Wang, Z.; Hu, Z.; Ding, S.; Feng, Q. Resolution-Enhanced Holographic Stereogram Based on Integral Imaging Using an Intermediate-View Synthesis Technique. Opt. Commun. 2020, 457, 124656. [Google Scholar] [CrossRef]
- Nishitsuji, T.; Yamamoto, Y.; Takashige, S.; Takanori, A.; Hirayama, R.; Nakayama, H.; Kakue, T.; Shimobaba, T.; Ito, T. Special-purpose computer HORN-8 for phase-type electro-holography. Opt. Express 2018, 26, 26722–26733. [Google Scholar] [CrossRef]
- Zhao, Y.; Cao, L.; Zhang, H.; Kong, D.; Jin, G. Accurate calculation of computer-generated holograms using angular-spectrum layer-oriented method. Opt. Express 2015, 23, 25440–25449. [Google Scholar] [CrossRef]
- Nishitsuji, T.; Shimobaba, T.; Kakue, T.; Ito, T. Review of fast calculation techniques for computer-generated holograms with the point-light-source-based model. IEEE Trans. Ind. Inform. 2017, 13, 2447–2454. [Google Scholar] [CrossRef]
- Lucente, M. Interactive computation of holograms using a look-up table. J. Electron. Imaging 1993, 2, 28–34. [Google Scholar] [CrossRef]
- Kim, S.; Kim, E. Fast computation of hologram patterns of a 3D object using run-length encoding and novel look-up table methods. Appl. Opt. 2009, 48, 1030–1041. [Google Scholar] [CrossRef]
- Pan, Y.; Xu, X.; Solanki, S.; Liang, X.; Tanjung, R.; Tan, C.; Chong, T. Fast CGH computation using S-LUT on GPU. Opt. Express 2009, 17, 18543–18555. [Google Scholar] [CrossRef]
- Shimobaba, T.; Ito, T.; Masuda, N.; Ichihashi, Y.; Takada, T. Fast calculation of computer-generated-hologram on AMD HD5000 series GPU and OpenCL. Opt. Express 2010, 18, 9955–9960. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ichihashi, Y.; Oi, R.; Senoh, T.; Yamamoto, K.; Kurita, T. Real-time capture and reconstruction system with multiple GPUs for a 3D live scene by a generation from 4K IP images to 8K holograms. Opt. Express 2012, 20, 21645–21655. [Google Scholar] [CrossRef] [PubMed]
- Leseberg, D.; Frère, C. Computer-generated holograms of 3-D objects composed of tilted planar segments. Appl. Opt. 1988, 27, 3020–3024. [Google Scholar] [CrossRef]
- Matsushima, K. Formulation of the rotational transformation of wave fields and their application to digital holography. Appl. Opt. 2008, 47, D110–D116. [Google Scholar] [CrossRef] [Green Version]
- Matsushima, K.; Schimmel, H.; Wyrowski, F. Fast calculation method for optical diffraction on tilted planes by use of the angular spectrum of plane waves. J. Opt. Soc. Am. A 2003, 20, 1755–1762. [Google Scholar] [CrossRef]
- Matsushima, K. Computer-generated holograms for three-dimensional surface objects with shade and texture. Appl. Opt. 2005, 44, 4607–4614. [Google Scholar] [CrossRef] [PubMed]
- Ahrenberg, L.; Benzie, P.; Magnor, M.; Watson, M. Computer generated holograms from three dimensional meshes using an analytic light transport model. Appl. Opt. 2008, 47, 1567–1574. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Hahn, J.; Lee, B. Mathematical modeling of triangle-mesh-modeled three-dimensional surface objects for digital holography. Appl. Opt. 2008, 47, D117–D127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pan, Y.; Wang, Y.; Liu, J.; Li, X.; Jia, J. Fast polygon-based method for calculating computer-generated holograms in three-dimensional display. Appl. Opt. 2013, 52, A290–A299. [Google Scholar] [CrossRef]
- Pan, Y.; Wang, Y.; Liu, J.; Li, X.; Jia, J. Improved full analytical polygon-based method using Fourier analysis of the three-dimensional affine transformation. Appl. Opt. 2014, 53, 1354–1362. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, J.; Chen, W.; Zhang, J.; Wang, P.; Xu, W. Research on three-dimensional computer-generated holographic algorithm based on conformal geometry theory. Opt. Commun. 2013, 309, 196–200. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, J.; Chen, W.; Wang, P.; Wu, S.; Li, J. Fast Computer-generated Hologram Algorithm of Triangle Mesh Models. Chin. J. Lasers 2013, 40, 0709001. [Google Scholar] [CrossRef]
- Zhang, Y.-P.; Wang, F.; Poon, T.-C.; Fan, S.; Xu, W. Fast generation of full analytical polygon-based computer-generated holograms. Opt. Express 2018, 26, 19206–19224. [Google Scholar] [CrossRef]
- Matsushima, K. Performance of the Polygon-Source Method for Creating Computer-Generated Holograms of Surface Objects. In Proceedings of the ICO Topical Meeting on Optoinformatics/Information Photonics, Petersburg, Russia, 4–7 September 2006. [Google Scholar]
- Bracewell, R.; Chang, K.; Jha, A.; Wang, Y. Affine theorem for two-dimensional Fourier transform. Electron. Lett. 1993, 29, 304. [Google Scholar] [CrossRef]
- Underkoffler, J. Occlusion Processing and Smooth Surface Shading for Fully Computed Synthetic Holography. In Proceedings of the Practical Holography XI and Holographic Materials III, San Jose, CA, USA, 8 February 1997. [Google Scholar]
- Gilles, A.; Gioia, P. Real-time layer-based computer-generated hologram calculation for the Fourier transform optical system. Appl. Opt. 2018, 57, 8508–8517. [Google Scholar] [CrossRef]
- Zhang, H.; Cao, L.; Jin, G. Computer-generated hologram with occlusion effect using layer-based processing. Appl. Opt. 2017, 56, F138–F143. [Google Scholar] [CrossRef]
- Frère, C.; Leseberg, D.; Bryngdahl, O. Computer-generated holograms of three-dimensional objects composed of line segments. J. Opt. Soc. Am. A 1986, 3, 726–730. [Google Scholar] [CrossRef]
- Lee, W.; Im, D.; Paek, J.; Hahn, J.; Kim, H. Semi-analytic texturing algorithm for polygon computer-generated holograms. Opt. Express 2014, 22, 31180–31191. [Google Scholar] [CrossRef] [PubMed]
- Ji, Y.; Yeom, H.; Park, J. Efficient texture mapping by adaptive mesh division in mesh-based computer generated hologram. Opt. Express 2016, 24, 28154–28169. [Google Scholar] [CrossRef] [PubMed]
- Yamaguchi, K.; Ichikawa, T.; Sakamoto, Y. Calculation method for CGH considering smooth shading with polygon models. Proc. SPIE 2011, 7957, 795706. [Google Scholar]
- Matsushima, K.; Sonobe, N. Full-color digitized holography for large-scale holographic 3D imaging of physical and nonphysical objects. Appl. Opt. 2018, 57, A150–A156. [Google Scholar] [CrossRef]
- Matsushima, K.; Nakahara, S. Extremely high-definition full-parallax computer-generated hologram created by the polygon-based method. Appl. Opt. 2009, 48, H54–H63. [Google Scholar] [CrossRef]
- Matsushima, K.; Nakamura, M.; Nakahara, S. Silhouette method for hidden surface removal in computer holography and its acceleration using the switch-back technique. Opt. Express 2014, 22, 24450–24465. [Google Scholar] [CrossRef]
- Stony Brook University 3D Scanning Laboratory. Available online: https://www3.cs.stonybrook.edu/~gu/software/holoimage/index.html (accessed on 4 July 2022).
- Wang, F.; Shimobaba, T.; Zhang, Y.; Kakue, T.; Ito, T. Acceleration of polygon-based computer-generated holograms using look-up tables and reduction of the table size via principal component analysis. Opt. Express 2021, 29, 35442–35455. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, H.; Zhang, B.; Zhang, Y.; Wang, F.; Qin, W.; Fu, Q.; Poon, T.-C. Fast 3D Analytical Affine Transformation for Polygon-Based Computer-Generated Holograms. Appl. Sci. 2022, 12, 6873. https://0-doi-org.brum.beds.ac.uk/10.3390/app12146873
Fan H, Zhang B, Zhang Y, Wang F, Qin W, Fu Q, Poon T-C. Fast 3D Analytical Affine Transformation for Polygon-Based Computer-Generated Holograms. Applied Sciences. 2022; 12(14):6873. https://0-doi-org.brum.beds.ac.uk/10.3390/app12146873
Chicago/Turabian StyleFan, Houxin, Bing Zhang, Yaping Zhang, Fan Wang, Wenlong Qin, Qingyang Fu, and Ting-Chung Poon. 2022. "Fast 3D Analytical Affine Transformation for Polygon-Based Computer-Generated Holograms" Applied Sciences 12, no. 14: 6873. https://0-doi-org.brum.beds.ac.uk/10.3390/app12146873