
Design of a NARX-ANN-Based SP Controller for Control of an Irrigation Main Canal Pool


1
Departamento de Automática y Computación, Universidad Tecnológica de la Habana José Antonio Echeverría (CUJAE), La Habana 19390, Cuba
2
Escuela Técnica Superior de Ingeniería Industrial de Ciudad Real, Universidad de Castilla-La Mancha (UCLM), Av. Camilo José Cela s/n, 13071 Ciudad Real, Spain
*
Authors to whom correspondence should be addressed.
Appl. Sci. 2022, 12(18), 9180; https://0-doi-org.brum.beds.ac.uk/10.3390/app12189180
Submission received: 28 July 2022
/
Revised: 7 September 2022
/
Accepted: 8 September 2022
/
Published: 13 September 2022
(This article belongs to the Special Issue Advances in Artificial Intelligence Methods Applications in Industrial Control Systems)
Abstract
:The management of irrigation main canals are studied in this research. One way of improving this is designing an efficient automatic control system of the water that flows through the canal pools, which is usually carried out by PI controllers. However, since canal pools are systems with large time delays and nonlinear hydrodynamics, these PIs are tuned in a very conservative way so that the closed-loop instability that may appear depending on the chosen operation regime is avoided. These controllers are inefficient because they have slow time responses. In order to obtain faster responses that remain stable independently of the operation regime, a control system that combines a Smith predictor, which is appropriate to control linear systems with large time delays, with a NARX artificial neural network (ANN), that models the nonlinear dynamics of the pools, is proposed. By applying system identification procedures, two nonlinear NARX-ANN-based models and a linear mathematical model of a real canal pool were obtained. These models were applied to implement a modified NARX-ANN-based SP controller and a conventional linear SP controller. Experimental results on our real canal pool showed that our modified NARX-ANN-based SP controller overcomes conventional linear SP controllers in both setpoint tracking and load disturbance rejection.
1. Introduction
Water is a vital and essential resource for human life, environment, as well as for sustainable development [1]. However, millions of people currently live in conditions of extreme water scarcity [2]. Water scarcity is the consequence of two particularities: physical scarcity, and economic scarcity [3,4]. Physical scarcity is determined as the insufficiency of natural resources to supply a region’s demand for water, while economic scarcity is demarcated as the consequence of poor investment in science, technologies, and infrastructures [5,6].
In irrigation systems, most of the water resources are transported by the networks of irrigation canals [7,8,9]. In most countries, irrigation canals are manually operated [10,11,12].
Currently, one of the reliable solutions to face the problems related to water scarcity in irrigated agriculture is the automatic control, which is considered a powerful tool to improve the operation and efficiency of water distribution in the irrigation main canals [13,14].
The application of conventional PID (proportional integral derivative) controllers is one of the most widespread solutions to control the water distribution in irrigation main canal pools, see e.g., [15,16,17]. However, this control strategy usually does not yield satisfactory results because irrigation main canal pools are complex systems that are characterized by nonlinear dynamic behaviors with dominant time delays [18,19,20], and PID controllers are not adequate for this class of processes [21,22,23,24]. Therefore, the design and implementation of controllers aimed at increasing operability and safety in irrigation main canal pools, represents an important and challenging research field [25,26,27].
One of the most widely used controllers for processes with dominant time delays (processes in which the time delay is much greater than the largest of the time constants) is the Smith predictor (SP) [28,29,30]. It is characterized by having a linear mathematical model of the process to be controlled in its structure, and it shows a low effectiveness in rejecting load disturbances [31,32].
The SP has been the subject of intensive research and modifications aimed at improving its performance, robustness, and disturbance rejection features, as well as enabling its application in diverse processes (unstable, time-varying, nonlinear, etc.), see e.g., [33,34,35].
The SP has been applied to water distribution control in different irrigation main canal pools. Among the first proposals are those made by M.J. Shand [36], R. Rivas-Perez [9], J.L. Del-tour [37] and F. Sanfilippo [38]. They are characterized by combining the conventional structure of the SP with PI or PID controllers, which do not guarantee an effective water distribution control. The adaptive SP was proposed also to improve the effectiveness of water distribution control in irrigation main canal pools with large variations in their operating conditions [18,26]. Furthermore, in recent years, the SP has been combined with fractional order controllers to increase the robustness of the control of irrigation canal pools, see e.g., [19,34].
One of the essential problems that present these SP-based control systems is their poor performance due to the use (in the SP structure) of linear mathematical models of the water distribution dynamic behavior in irrigation main canal pools [6]. They also have a low rejection of load disturbances, which originates insufficient accuracy in water distribution control.
Irrigation main canals are nonlinear complex processes [8,9]. The physical dynamics of the water distribution in irrigation main canal pools has traditionally been modeled by the Saint-Venant equations, nonlinear hyperbolic partial differential equations with complex constraints, whose analytical solution is very complicated in the case of an arbitrary geometry [39,40]. These equations are derived from mass and momentum balances and are very difficult to use for the design of a controller [8]. Consequently, it is used in the application of different linearization methods [20] or the obtention of linear mathematical models by using systems identification tools [23,40]. The linear mathematical models yielded by these procedures do not characterize accurately the nonlinear dynamic behavior of the water distribution in irrigation main canal pools and, accordingly, their application to the controller’s design does not yield satisfactory results in many cases [6,18].
In general, nonlinear processes can only be adequately characterized by nonlinear models [41]. Thus, in spite of the abundant research in this field, the development of nonlinear control-oriented models of irrigation main canal pools remains an open problem.
Recently, artificial neural networks (ANNs) are being used to describe effectively and accurately the dynamic behavior of processes with nonlinear dynamic behaviors. They are computational models that process information inspired by the behavior observed in biological neurons [42,43,44].
ANNs receive increasing acceptance and are applied in diverse fields because they use non-physics-based algorithms, handle appropriately nonlinear relationships, and incorporate user experience into their structure [45,46,47]. Therefore, they constitute a powerful tool for obtaining adequate dynamic models of nonlinear and time-varying processes that can be applied to the design of controllers based on nonlinear process models, including SP and model predictive controllers (MPC), see e.g., [48,49,50,51,52].
An important and useful class of discrete-time nonlinear models is the Nonlinear Autoregressive with eXogenous Inputs (NARX) model, which was introduced by S.A. Billings in 1980s as a new representation of a wide class of discrete nonlinear systems [41]. Different ANN architectures have been considered as subsets of the NARX model [43].
The NARX-ANN and TD-NARX-ANN (Time Delay-NARX-ANN) are recurrent dynamic neural network architectures used to model different nonlinear dynamic systems that are characterized by a good learning, fast convergence, and well generalization [53,54].
Diverse authors have proposed the use of NARX-ANN and TD-NARX-ANN for modelling different nonlinear processes and implementing their control systems. A NARX-ANN model for the prediction of the daily direct solar radiation was used in [55]. A NARX-ANN based modeling approach to establish a robust water management tool to aid urban water managers in controlling the development of shallow water tables induced by artificial recharge activity was presented in [56]. A NARX-ANN model for accurate discharge prediction through lateral orifices of irrigation main canals was employed in [57]. A NARX-ANN to predict moisture sorption kinetics and consequently equilibrium moisture content of shiitake mushrooms over a wide range of relative humidity and temperature was developed in [58]. A NARX model reference adaptive control system of a magnetic levitation process was introduced in [59]. A NARX-based model predictive controller for grain dryers was designed in [60]. A NARX-based model predictive controller for turboshaft direct fuel control of an aircraft engine to improve its response ability in the presence of degraded conditions was implemented in [61]. A novel control system for a shunt active power filter based on a NARX-ANN was proposed in [62]. Based on a NARX model, two intelligent controllers to guarantee the desired growth conditions of crops, such as humidity and temperature, in a greenhouse were implemented in [63]. A general-purpose genetic algorithm (GA)-optimized NARX-ANN-based controller for control of nonlinear chemical and biochemical processes was introduced in [64]. A NARX-ANN-based predictive controller of personalized heating systems was designed in [65]. A NARX-ANN-based Smith predictor controller for time-delay compensation of nonlinear processes was developed in [46,66].
The main objective of this paper is the design of modified SP controllers that use NARX-ANN models as nonlinear internal models for the accurate and reliable control of water distribution in an irrigation main canal pool.
The major contributions of this paper are: (1) the proposal for the first time of a water distribution controller in an irrigation main canal pool founded on a modified SP with a NARX-ANN based model that describes the nonlinear dynamic behavior of the canal pool with an arbitrarily small error and (2) the improvements in the SP rejection features to load disturbances by means of including a gain tuning block that allows an adequate estimation of the load disturbances to be removed.
The proposed controller has the advantages of increasing the operability and reliability of the water distribution control systems, as well as reducing current water losses due to operation in the irrigation main canals pools.
This article is organized as follows. Section 2 proposes mathematical models of the studied process through the application of systems identification procedures. Section 3 develops the design of the NARX-ANN-based SP controller. Section 4 shows the discussions of the obtained results. Finally, some conclusions are offered in Section 5.
2. ANN-Based System Identification of an Irrigation Main Canal Pool
The research presented in this paper is based on the Zaza-Ciego de Avila Main Canal (ZCAMC), which is one of the most important hydraulic constructions in Cuba [67]. This canal is in the central zone of the country and connects the Zaza reservoir (with a capacity of 1,020,106 m3) with the south of the Ciego de Avila County. The surface irrigated is about 148,200 ha that is used for the cultivation of rice, sugar cane, citrus fruits, soybeans, horticulture, as well as for the development of fishing and livestock. The canal delivers a total volume of 900,106 m3 of water/year that alleviates the overexploitation of the phreatic level in the region [68].
This canal is a 44.5 km long cross-structure with variable water discharge between 33.0 and 23.0 m3/s, overall canal height from 4.80 to 3.87 m, and normal water depth varying from 4.30 to 3.10 m. It has a trapezoidal cross-section, the bottom width varies from 6 to 3.2 m, and the average slope is 0.07 m/km [6]. It has four pools separated by undershot gated cross-structures.
This canal is mostly operated in a downstream end regulation mode [8,26]. All the pools of this canal are electrified and equipped with downstream end water level and gate position sensors, SIMATIC S7-300 PLCs, motors for the gates’ positioning, and systems for data acquisition, processing, and storage.
Likewise, this canal has a remote supervisory control and data acquisition system (SCADA) with communication by radio and field buses that provide real time data of the controlled variables. Figure 1 is a view of ZCAMC.
Mathematical models have a vital role in systems analysis and design [41]. The controller design habitually requires a dynamic mathematical model that accurately characterizes the behavior of the processes to be controlled [69,70]. Therefore, one of the significant challenges of the controller design methodology is to obtain a suitable mathematical model of the process.
Several mathematical models have been developed for the irrigation main canal pools, see e.g., [8,40,50]. Since the irrigation main canal pools have complex nonlinear dynamics, linear approximation models of their dynamic processes are often developed [8,9], which have been often attained by applying system identification procedures, see e.g., [9,18,23].
System identification is the approach used to infer and construct process models from a set of experimental input-output data [41,69].
Since 1986, neural networks have been applied in the system identification of non-linear dynamic processes [42].
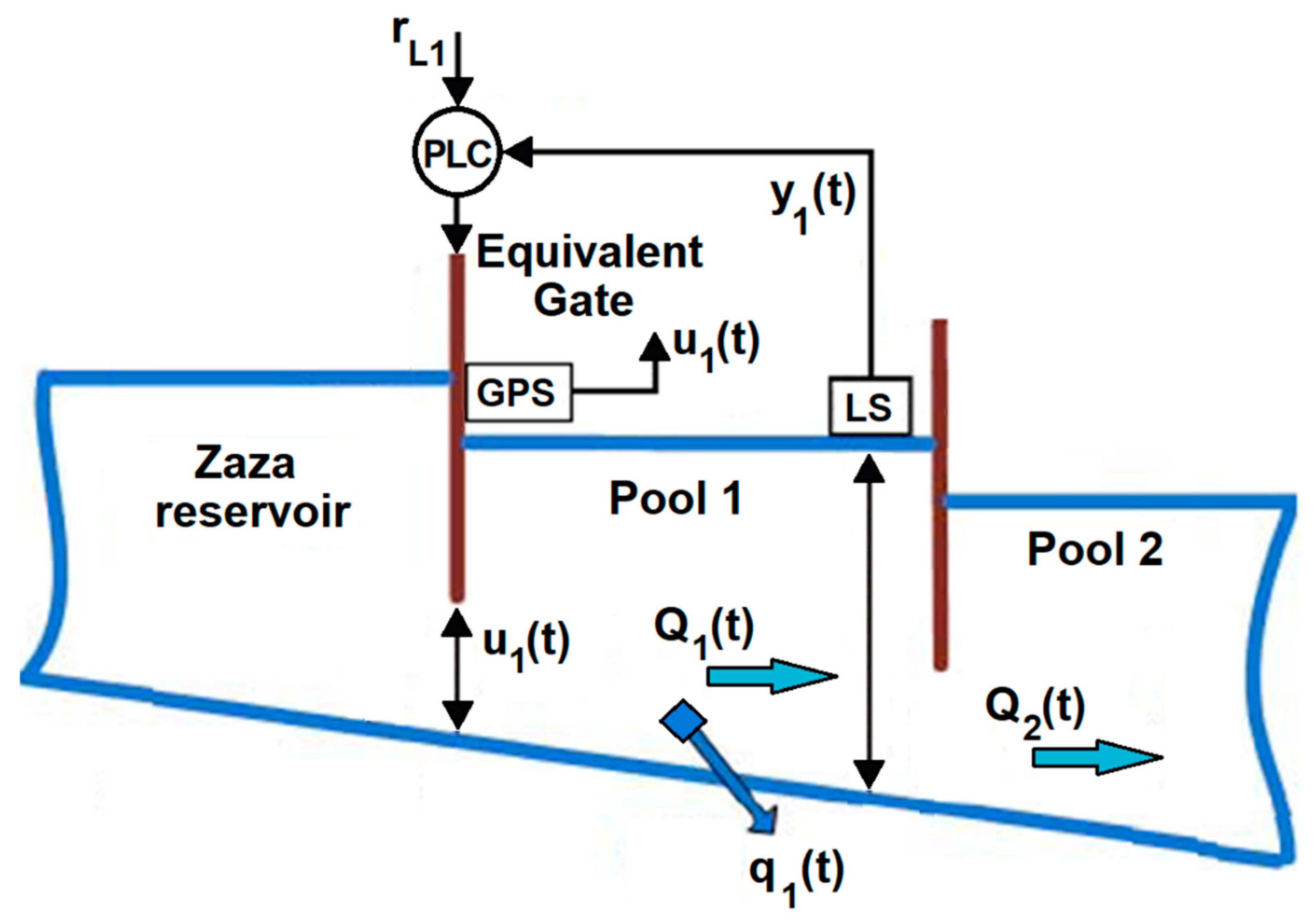
Data and results reported in this paper were obtained from the first pool in the ZCAMC. It is a trapezoidal cross section main canal pool 12.5 km long, operated by using the distant downstream operation method [6,70]. This pool is equipped with an industrial personal computer, and a SIMATIC S7-300 PLC. The downstream end water level is controlled by four upstream undershoot gates situated at the beginning of the pool. Figure 2 is a schematic representation of this canal pool, in which the four control gates are represented by an equivalent gate.
The available measurements are the downstream end water levels , and the gate positions . Thus, the controlled variable is the downstream end water level , and the manipulated variable is the position of the upstream equivalent gate .
In this paper, using the system identification procedures [69] and the real-time experimental data attained through the SIMATIC S7-300 PLC system in open loop operating points, three models are obtained that describe the nominal dynamic behavior of the water distribution in the studied canal pool. The first and second models are nonlinear and are based on a NARX-ANN and a TD-NARX-ANN with recurrent architectures [53] due to the advantages of this type of structures, among which are the possibility of approximating any function with the desired precision, provided that it presents a limited number of discontinuities [43].
For nonlinear system identification the Matlab Neural Network-based System Identification Toolbox was used.
Recurrent ANNs are characterized by having feedback (or connections) between neurons in one layer and neurons in previous layers and in the same layer, in addition to forward connections, as well as maintaining a certain dependence on events that occurred in past moments (memory effect), which is convenient in the system identification procedure [43].
The development of the best architecture for the NARX-ANN-based models requires the determination of the number of hidden layers, the activation functions, the process time delays, and the efficient training algorithm [53].
The mathematical formulation of the NARX-ANN-based model can be written by the following discrete time expression [71]:
where and denote respectively the input and output of the model at the discrete time step , , are the input-memory and output-memory orders respectively, and is a nonlinear function represented by the ANN. The sampling period of the input and output data was 30 s.
The TD-NARX-ANN-based model is expressed as [72,73]:
where () is the number of process time delay sampling periods. We consider which implies a time delay of 300 s.
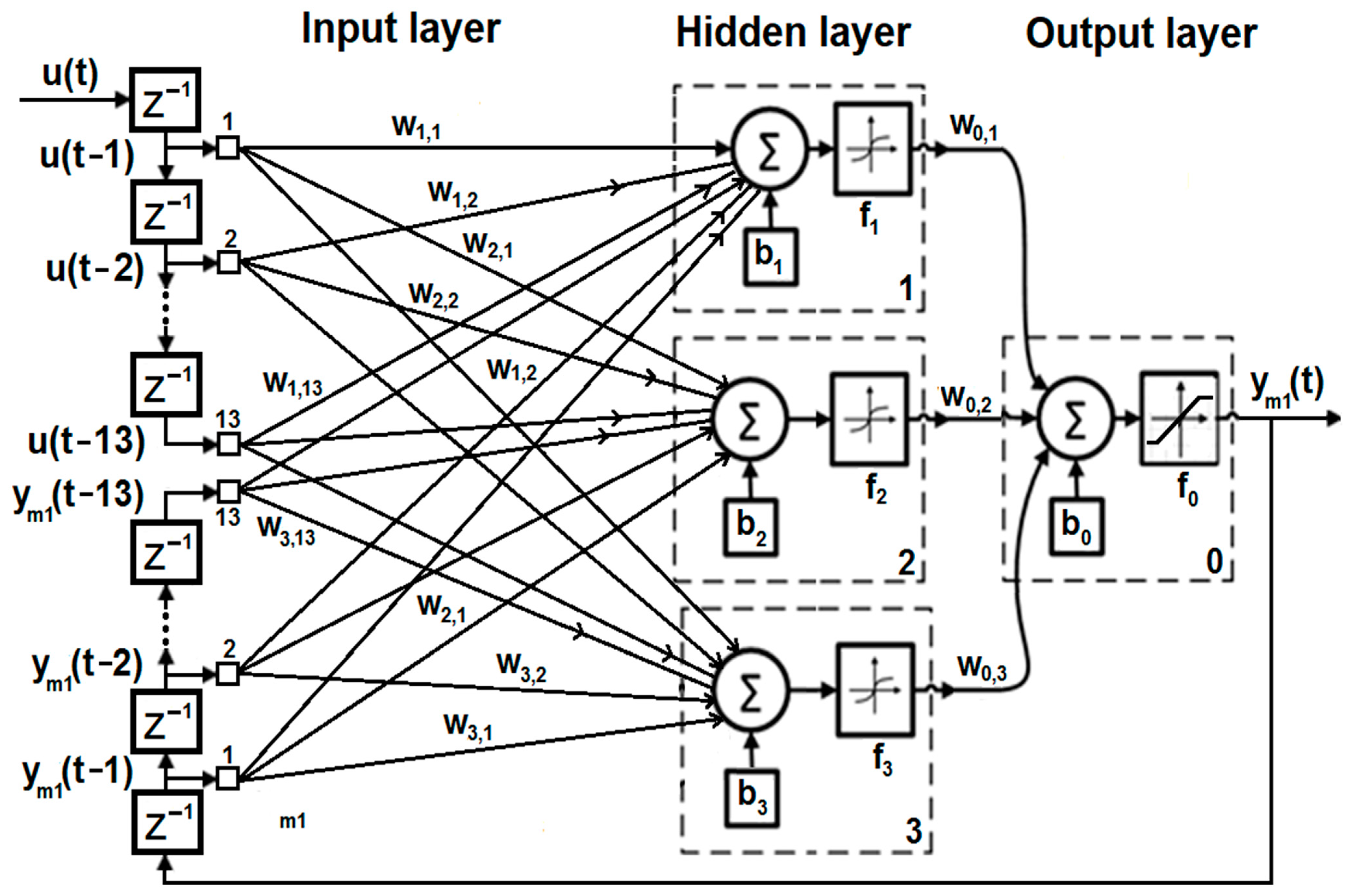
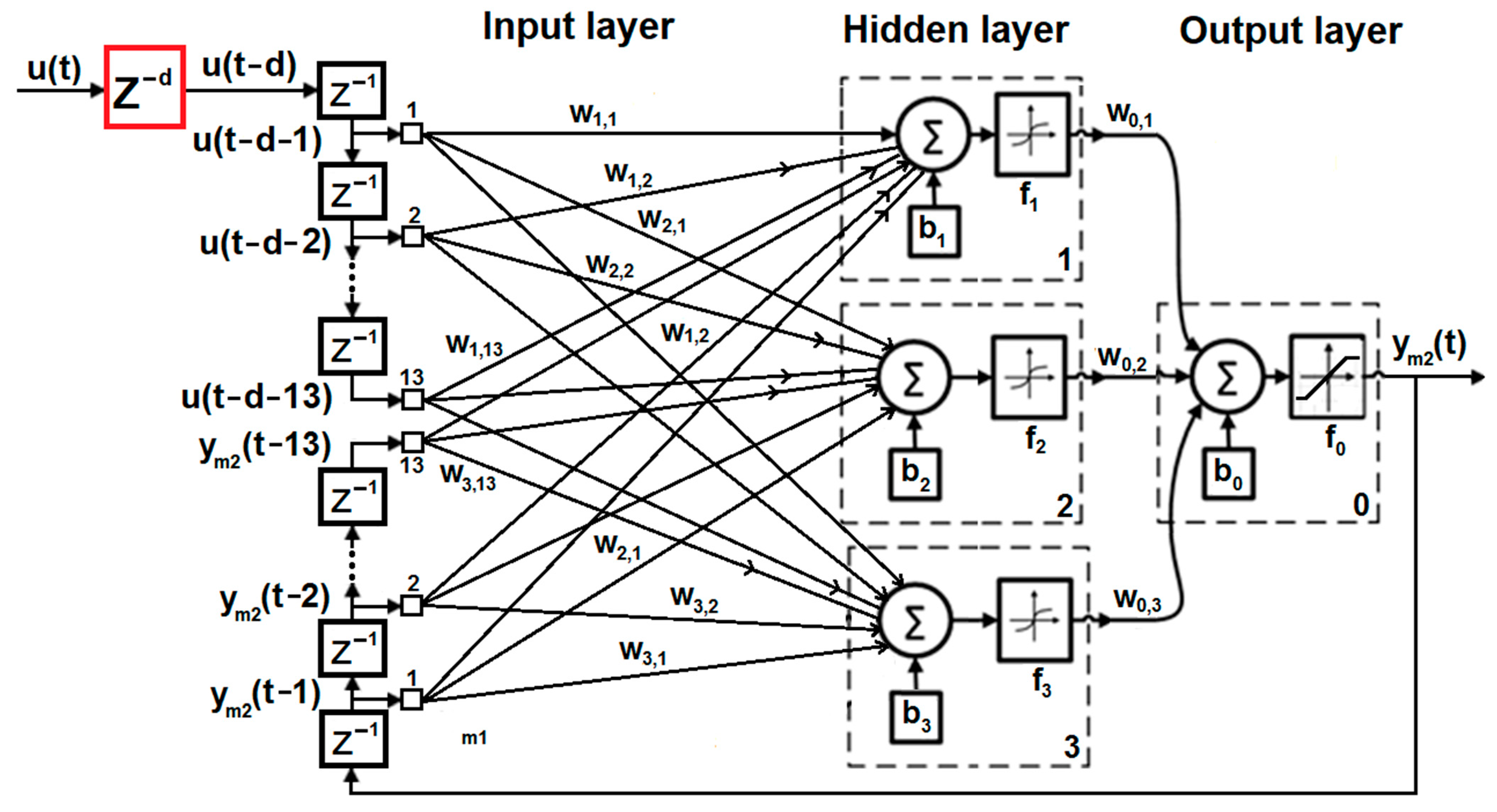
Figure 3 and Figure 4 illustrate the diagrams with the recurrent architectures of the NARX-ANN and TD-NARX-ANN-based models that have been designed, which have an input layer with 13 memory blocks for the input and output signals, a hidden layer with three neurons, and an output layer with one neuron. The activation functions in the hidden and output layers are hyperbolic tangent sigmoid and piecewise-linear (symmetric saturating linear) respectively.
The difference between the architecture of these models lies in the TD-NARX-ANN-based model has the time delay block highlighted in red line.
The mathematical expressions of the NARX-ANN- and TD-NARX-ANN-based models are, respectively, [43]:
where are the synaptic weights of each neuron of the hidden layer from the inputs , are the synaptic weights of each neuron of the hidden layer from the outputs (), are the synaptic weights of the output layer neuron from each neurons of the hidden layer, are the bias weights of each neuron of the hidden layer, is the bias weight of the output layer neuron, is the hyperbolic tangent activation function of each neuron of the hidden layer, which is defined by the expression:
is the neuron number of the hidden layer, and is a piecewise-linear activation function of the output layer, which is formed by three linear pieces joined to form a non-linear function (symmetric saturating linear) defined as:
The optimal number of neurons in the hidden layer was attained by using the Akaike Information Criterion (AIC). The lowest value of −6.29 was obtained for 3. The input-memory and output-memory orders (13) were obtained from the time-series modeling using the Box–Jenkins approach.
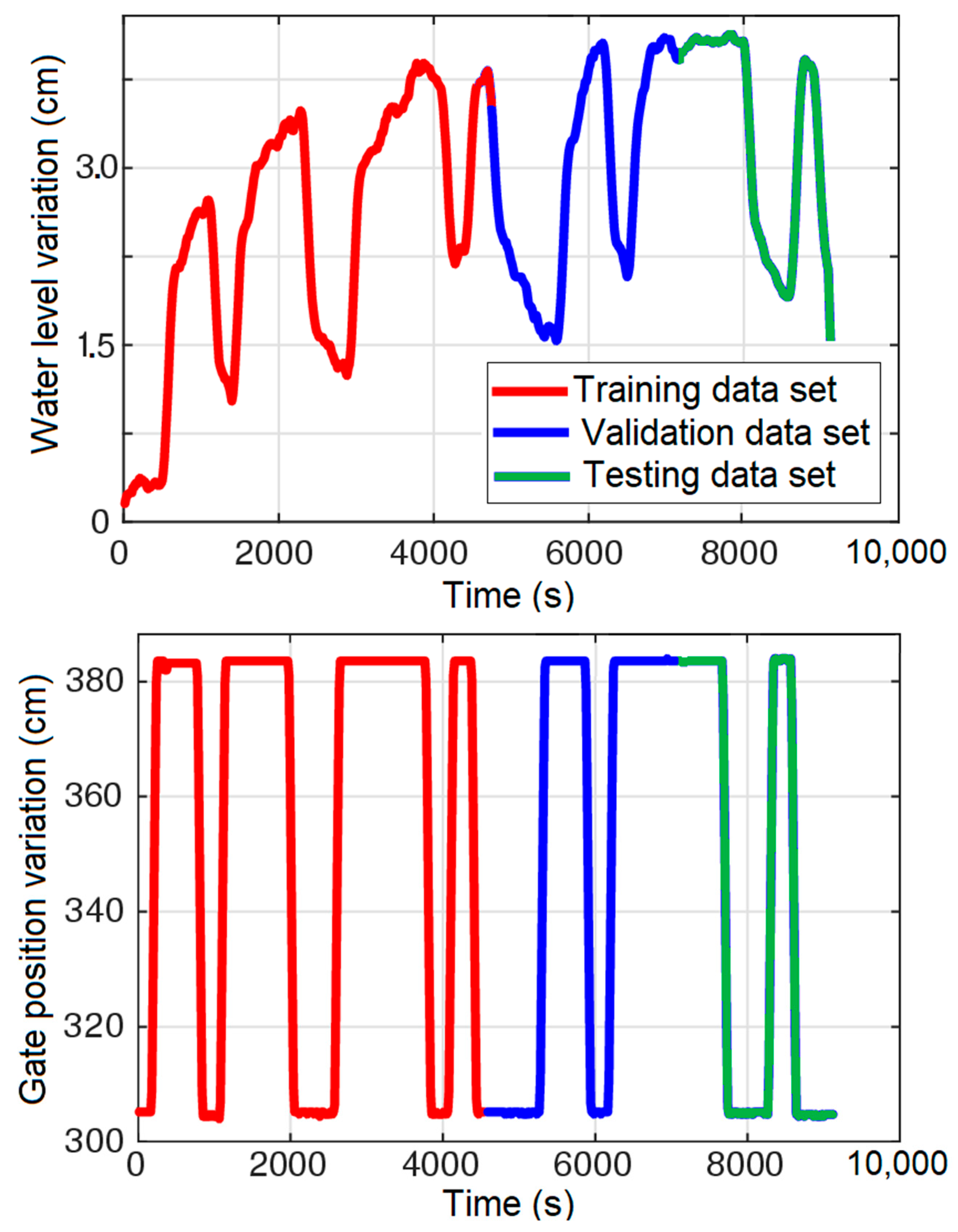
The data set that describes the irrigation canal pool studied in its entire range of operation was attained by exciting the upstream equivalent undershoot gate, i.e., the process input , with a pseudo random binary sequence (PRBS), and measuring the downstream end water level :
Figure 5 illustrates the dataset obtained, which was split into three parts, 50% for the training set, 25% for the validation set, and 25% for the testing set.
Training is an iterative process that consists of determining the synaptic weights and bias of each of the neurons of the ANNs designed, so that their output signals converge towards the desired states [72]. The training algorithm should adjust the ANN parameters to minimize the following performance index (mean square error) [71]:
where is a vector of current parameters (weights and biases) of the ANN, is the training error, is the observed (measured) data of the downstream end water level, is the ANN output (estimation of the downstream end water level developed by the ANN), and is the total number of samples used to train the ANN.
For the training of the two designed NARX-ANNs, a modified Levenberg-Marquardt optimization algorithm was used, which is a non-linear optimization algorithm that combines the Gauss-Newton method and the Steepest-Descend Gradient method in a single expression and finds the minimum of the function (either linear or nonlinear) over a space of parameters and optimizes the solution [74,75]. This algorithm is characterized by its high convergence speed and reliability, although the complexity of its calculations is greater than in other algorithms [43]. Therefore, the synaptic weights and biases of the NARX-ANNs were adjusted by the algorithm [76]:
where, is the Jacobian matrix, is the Hessian matrix, is the error vector of ANN between the real output and the estimated ANN output, represents the identity matrix of appropriate size, is the number of iterations, and is the learning coefficient that is automatically updated based on the error at each iteration to secure the convergence.
The FIT crossover performance index was used to quantify the degree of precision of the obtained models. It is defined by the expression [69]:
where are the observed (measured) data of the downstream end water level, are the estimates of the downstream end water level developed by the model, and is the means of the downstream end water level.
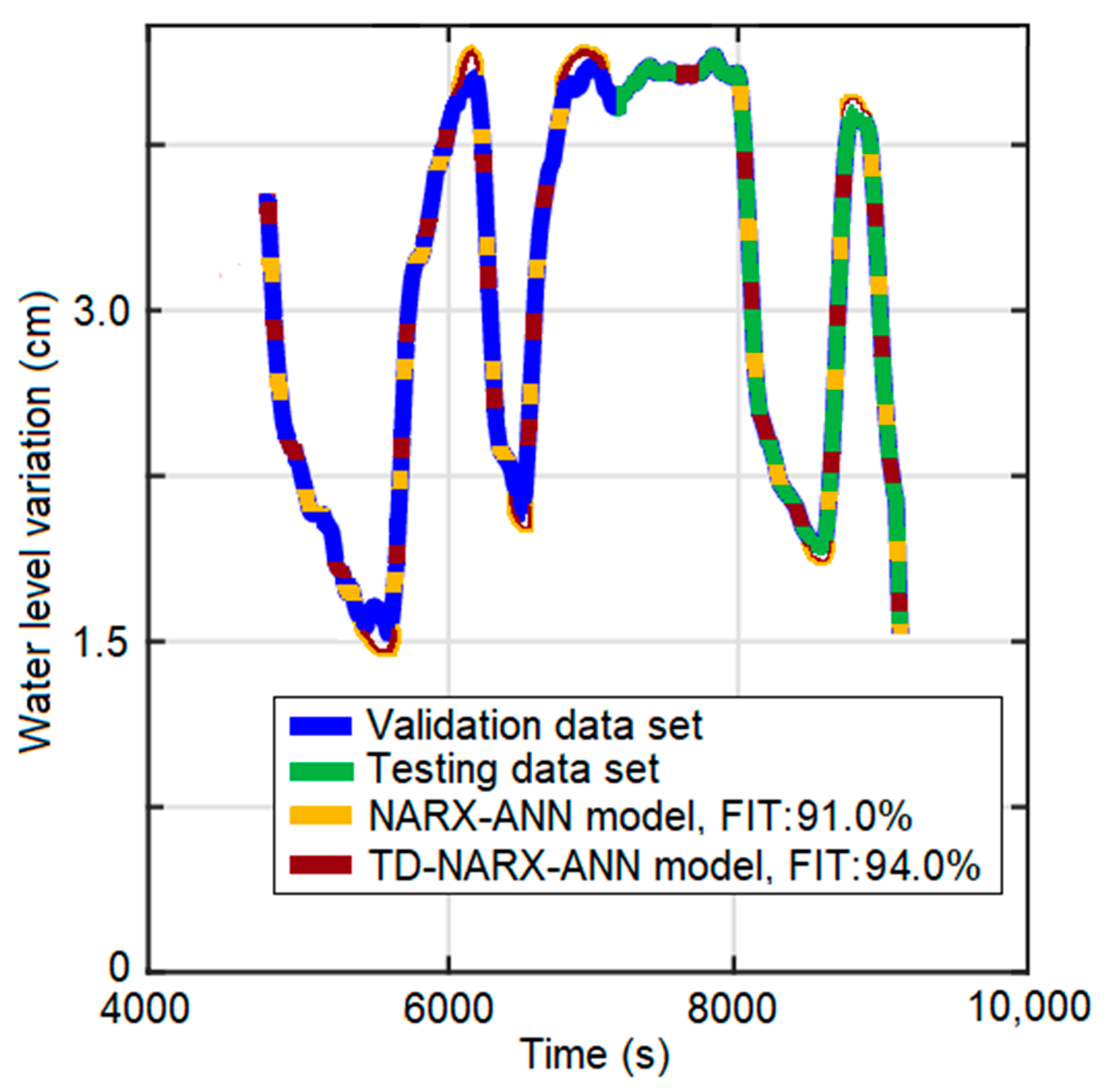
The simplest procedure to evaluate the quality of the derived ANN model is to train it with the training dataset and validate its performance with different test datasets, e.g., with the validation and testing data sets [77]. The validation data set is used to improve the model performance by fine-tuning the model, while the testing data set is used to provide an unbiased assessment of the final model fit [41].
Validation results of these models with the validation and training data sets are given in Figure 6, which show that the two models adequately describe the dynamic behavior of the water distribution in the canal pool under study with FIT performance indices of 91.0% for the NARX-ANN- based model and 94.0% for the TD-NARX-ANN-based model.
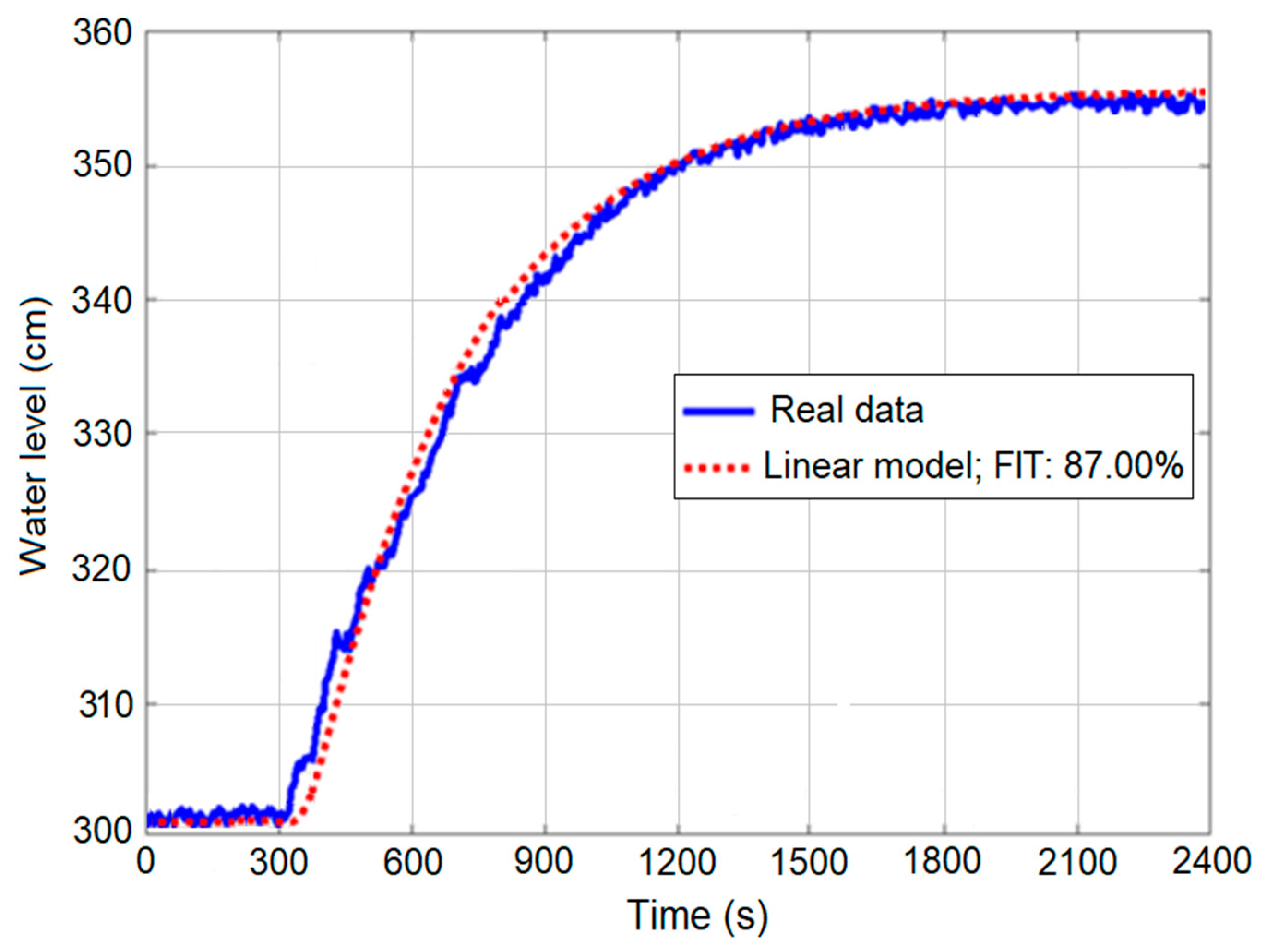
The third model is linear. It was obtained by applying the step response method [69] and is represented by the following transfer function with time delay:
where is the static gain, is the time constant, and is the time delay.
For linear system identification the Matlab system identification toolbox was used.
Figure 7 illustrates the validation results of the linear model (11) with the estimated nominal parameters with a FIT performance index of 87.0%, which indicates that (11) is a suitable model since models with FIT greater than 80% are considered adequate for process control [69].
The FIT indexes obtained with the three models demonstrate the better performance of NARX-ANN-based models due to their ability to model the non-linear dynamic behaviors.
3. Design of the NARX-ANN-Based SP Controller
Model (11) shows that the dynamics of the water distribution in our canal pool is characterized by a dominant time delay [28].
Since the time delay reduces the gain crossover frequency, the phase margin, and the speed of response of the control systems, and even can cause the loss of the stability of the closed-loop system [78], the design of a modified SP controller founded on the NARX-ANN-based models previously obtained is proposed for the effective control of water distribution in our canal pool.
The main advantage of the SP is that it removes the real process from the control loop, and it allows then to design the controller from a mathematical model that does not include the process time delay [29].
Therefore, if the mathematical model accurately describes the dynamics of the process to be controlled, the SP eliminates the time delay from the characteristic equation of the closed-loop control system [28].
One of the main problems of the SP controller is the degradation of its performance and robustness when the processes are subjected to the effect of external load disturbances [28,30].
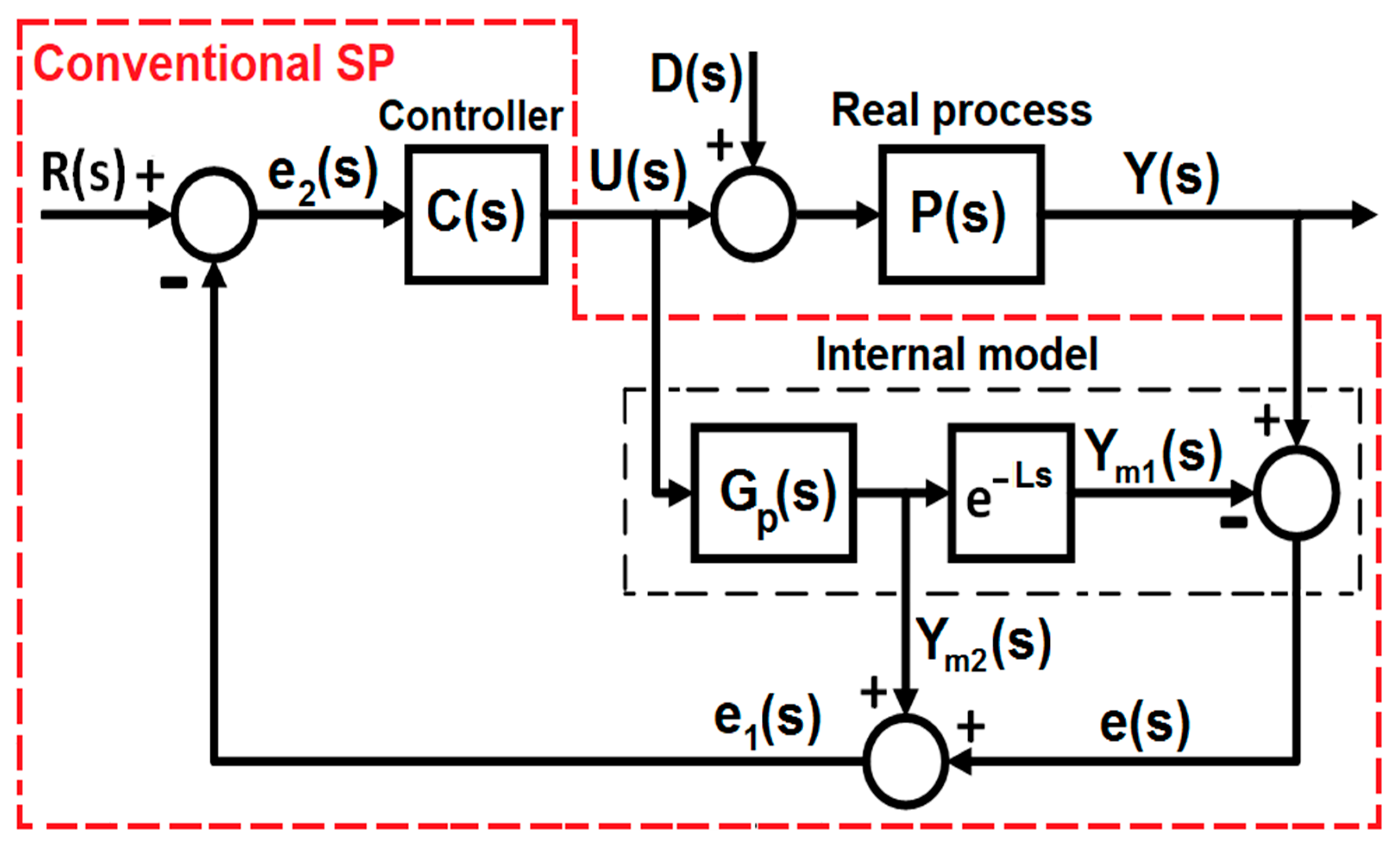
Figure 8 illustrates a diagram of the conventional SP structure, made up of the controller , the real process , and the complete linear mathematical model of the process (integrated by the model without time delay and the time delay , which is connected in parallel with the real process. Usually, is a standard PI or PID controller [21].
If the mathematical model accurately describes the dynamic behavior of the real process, that is , the output signal has no time delay and constitutes a prediction of the output signal of the real process without time delay [31].
Therefore, based on the mathematical model, it is possible to obtain a prediction of the real process output signal ahead of the time delay. The real process output signal is fed back to the controller to remove the negative effect of the load disturbance .
The transfer function of the load disturbance is the following:
where is a time varying parameter in the following range: .
If the complete mathematical model accurately describes the dynamic behavior of the real process and there is no load disturbance, the error signal is zero and the transfer function of the closed-loop control system is represented as:
If is a PI controller, the control algorithm is defined by the expression [79]:
where is the proportional gain, is the integral time constant, is the error signal and is the control signal. Consequently, the controller is designed for the real process without time delay and the response of the closed-loop control system is time delayed.
The right performance of the SP depends on the exact knowledge of the process model and the time delay [28]. Any model uncertainty and/or load disturbance can lead to imprecise time responses of the control system, which can even cause its instability [32].
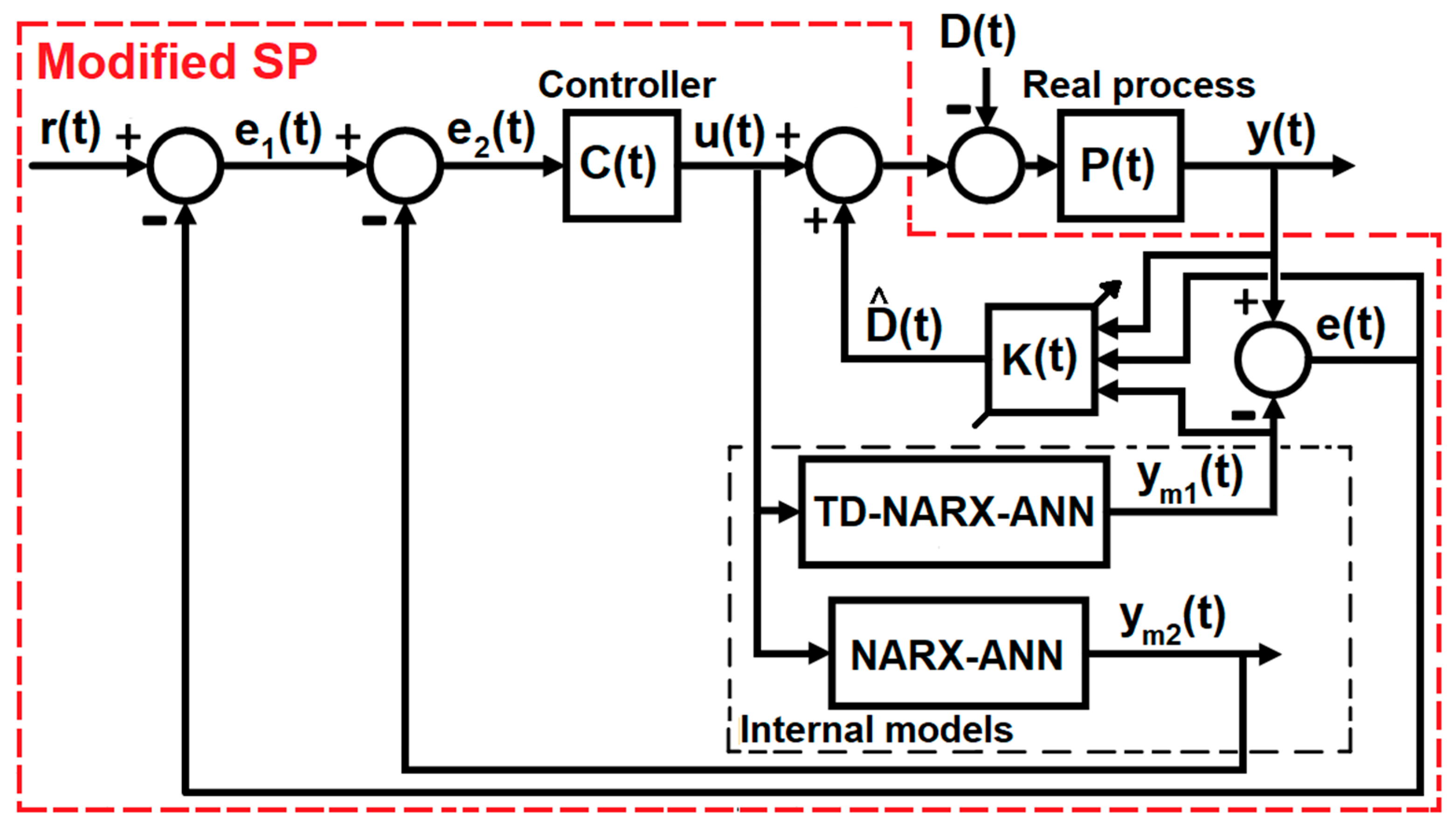
Our contribution consists of: (1) replacing the linear mathematical model of the conventional SP structure by the non-linear NARX-ANN (3) and the TD-NARX-ANN (4) based models obtained in the previous Section; and (2) adding to the controller output signal a signal equivalent to the estimate of the load disturbance (for example, an increase in the lateral discharge ) in order to reject its negative effect on the control system and, thus, increase the controller performance.
Figure 9 illustrates the diagram of our proposal for the modified SP structure with the non-linear NARX-ANN-based models for the water distribution control in the studied canal pool, where is a gain tuning block to achieve an adequate estimate of the load disturbance . If there is no load disturbance, , and the error signal is . However, when the load disturbance appears, we have that . If the error signal returns to by tuning the of the gain tuning block, then the output signal of the gain tuning block is a suitable estimation of the load disturbance .
The autotuning algorithm of the gain block is the following:
If the error signal and consequently . But if the error signal and therefore, the new is obtained through multiplying by a tuning gain obtained as .
The linear PI controller in the discrete time domain is represented as [80]:
where , is the sampling period.
In the proposed modified structure of the SP, the design of the controller was carried out based on the following non-linear PI control law [46]:
where is a nonlinear function represented by an ANN, is the control system error, , and is the setpoint.
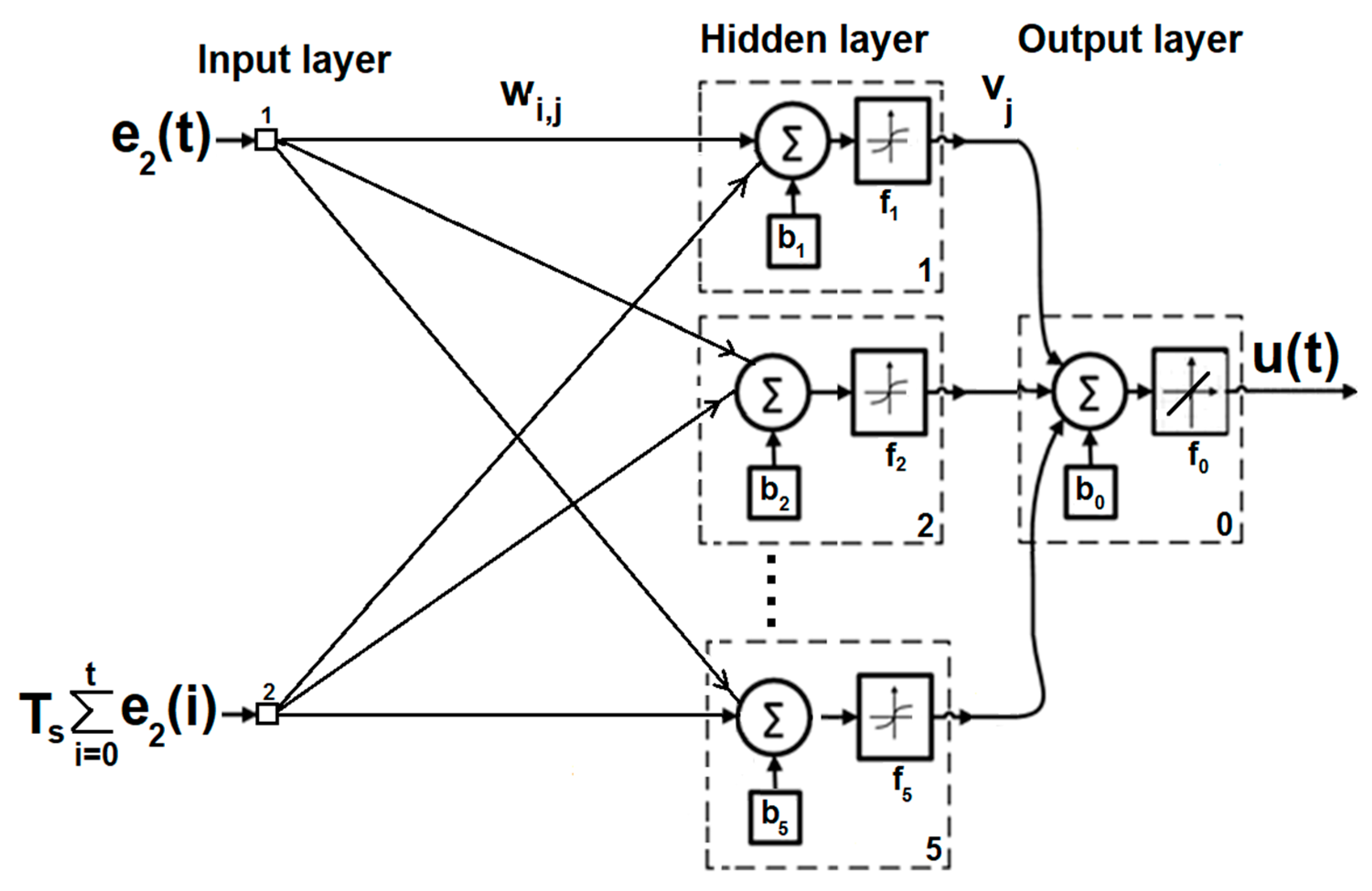
A multilayer feedforward with tree layers ANN was used to design the nonlinear ANN PI controller. The input layer has two nodes (the system error and the sum of the system error ), the hidden layer has 5 nodes, and the output layer 1 node. The neuron activation function of the input layer is the linear function , of the hidden layer is the sigmoid function , and of the output layer is . Figure 10 illustrates the diagram with the architecture of the designed nonlinear ANN PI controller.
The data for training this controller was obtained from a discrete-time linear PI controller installed in the canal pool under study.
In addition, using the frequency domain method, a conventional PI controller embedded in a SP structure was designed with specifications: gain crossover frequency rad/s to achieve a settling time around s and phase margin 80° to obtain a nearly zero overshoot. The controller tuned with these specifications was:
4. Results and Discussions
For the evaluation of the performance of the modified SP control system with the NARX-ANN-based models, a comparative experimental analysis was carried out with another SP with a conventional structure, that included an internal linear model (13) and did not include the gain tuning block . Both control systems were designed to fulfill the same specifications, considering the following real operation scenarios of our canal pool.
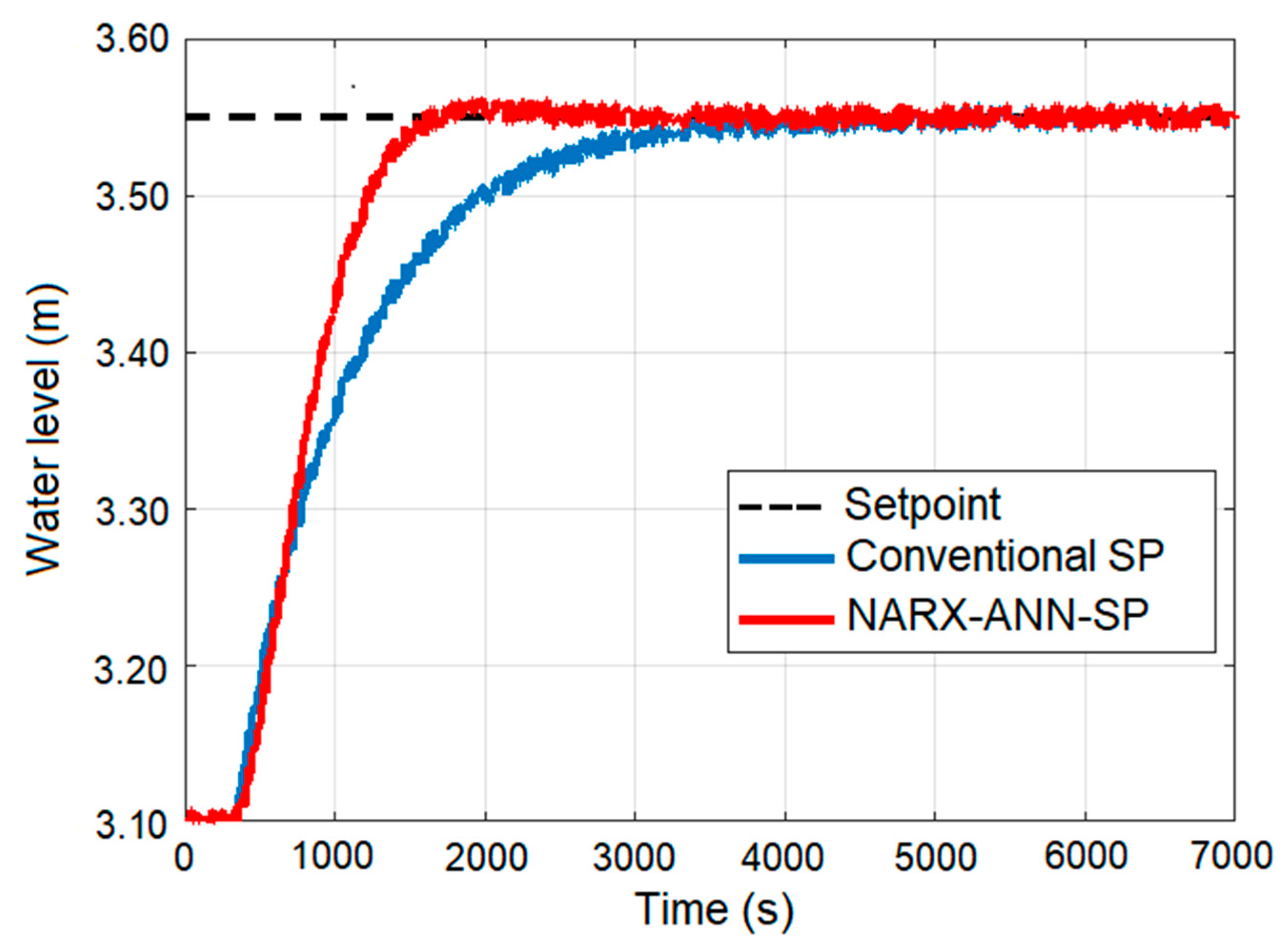
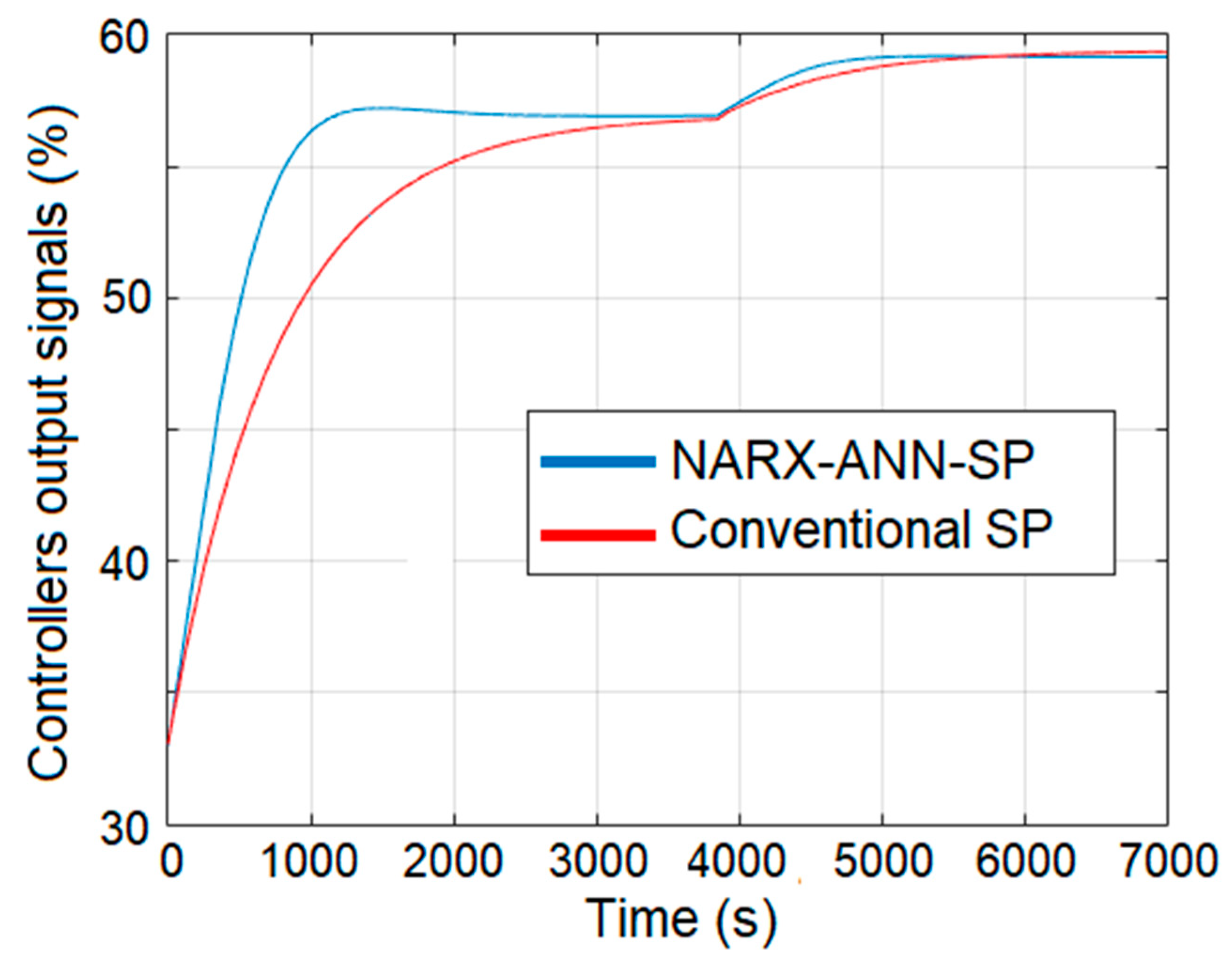
Scenario (1): Experimental performance evaluation of the water distribution control system with both designed controllers when a positive setpoint change is applied from 3.10 to 3.55 m (setpoint tracking). Table 1 and Figure 11 illustrate the comparative experimental time responses to that setpoint change yielded by the water distribution control system with the two controllers, where is the overshoot, is the steady-state error, is the rise time and is the settling time. Figure 12 shows the experimental comparative output signals of the controllers designed.
From Figure 11 and Table 1 it is observed that the control system with the NARX-ANN-based SP controller designed reaches the new reference water level practically without overshoot and with zero steady state error—like the conventional SP—but the rise time and the settling time are approximately the 50% of the times yielded by the conventional SP. After time 3500 s, the responses provided by both control systems have reached the new setpoint with zero steady state error and, therefore, their steady time responses are similar. We highlight that the same responses attained after 3500 s is consequence of the integral terms included in the structures of controller (17) and the PI controller (18), which is a common term in both control systems. However, the main difference is produced in the transient, in which our proposal achieves the final value much faster than the conventional SP controller.
Specifications used to design the conventional PI controller embedded in the SP structure are quite conservative. In theory, much faster responses could be achieved using this control system by tuning controller (18) with higher values of the gain crossover frequency . However, the value of used here—though it is not too fast—yields a robust controller (18) that maintains a stable closed-loop response in all the range of operation of the canal, and not only in the nominal operation point at which the controller has been designed. In fact, the highly nonlinear dynamics of the canal makes aggressive linear controllers (controllers that yield very fast damped responses) designed based on a linearized model around an operation point become unstable when the canal operates in a point far away from the linearized one. However, our nonlinear control system based on our TD-NARX-ANN nonlinear model allows a much faster response in the nominal operation point without neither unstabilizing or excessively degrading the closed-loop response of the canal when operating at points far away from nominal. This is caused by the fact that our TD-NARX-ANN nonlinear model captures better than linear model (11) the nonlinear behaviour of our canal pool allowing us to design a controller that takes into account at some extent such nonlinearity.
These results confirm that the NARX-ANN-based SP controller designed improves the management of the water flow through the canal pool and satisfies the users water demand in a shorter time.
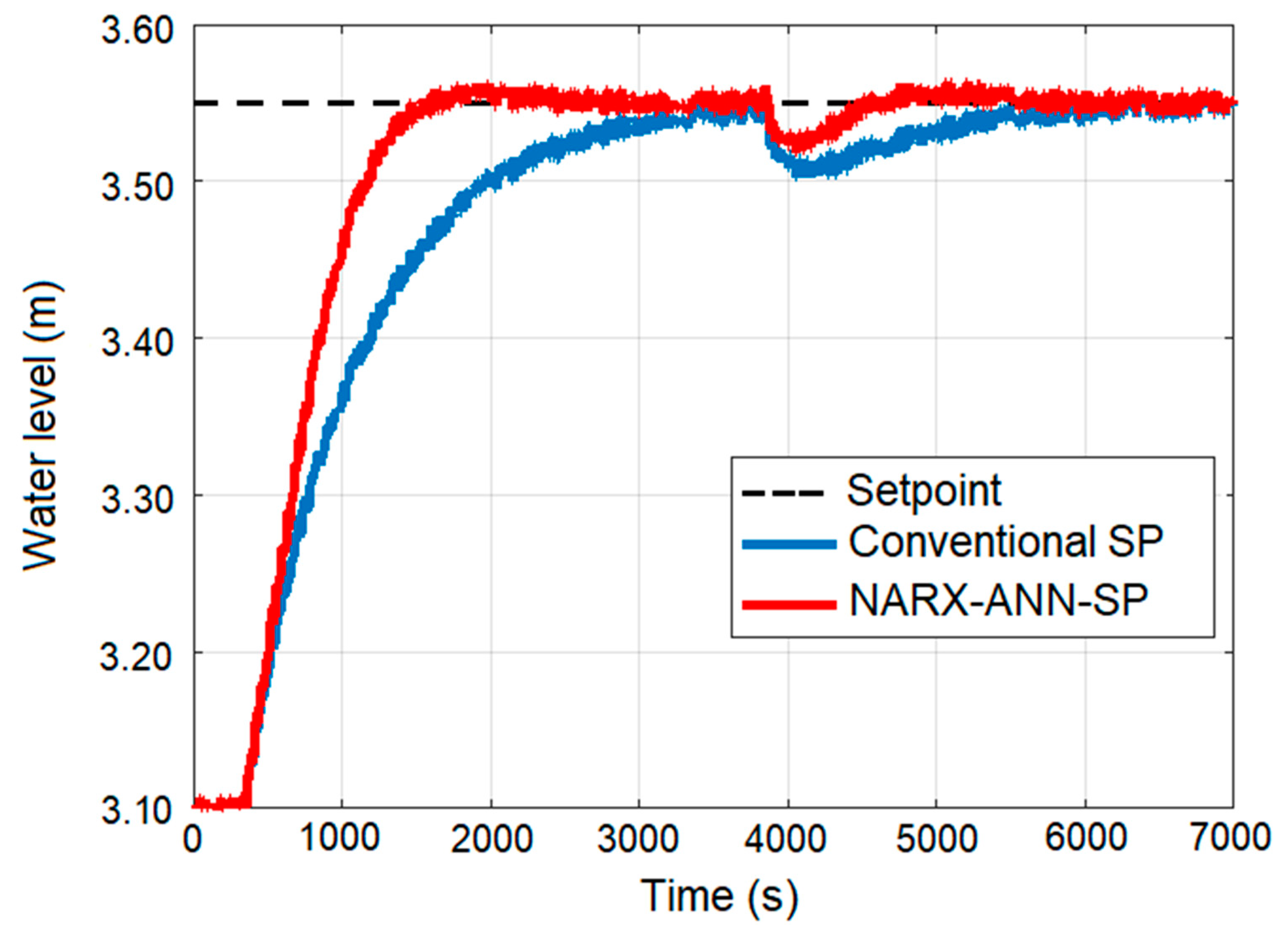
Scenario (2): Experimental performance evaluation of the water distribution control system with both designed controllers against the rejection of an external load disturbance . In this case, an increment of 10% in the lateral discharge of the canal pool to satisfy the users water demand was considered as an external load disturbance . Figure 13 illustrates the experimental comparative time responses obtained by the water distribution control system with both designed controllers against the effect of an increment in the lateral discharge () originated in 3800 s, causing a decrement in the water level of approximately 5.0 cm. The value obtained in the gain tuning block of the designed NARX-ANN-based SP controller was 0.1.
These results support the assumption that the best performance of the control system is obtained with the designed NARX-ANN-based SP controller, which makes it possible to fully reject the negative effect of the load disturbance and restore the setpoint water level of 3.55 m in the canal pool in an approximate time of 700 s, while with the conventional SP this load disturbance is fully rejected in an approximate time of 2200 s, which represents an approximate decrement in the rejection time of 70%.
Though conventional SP structures allow very fast responses to setpoint changes of linear systems, their disturbance rejection performance is not good because, though the steady state error caused by a constant disturbance can be driven to zero, the settling time required to achieve this is large. In fact, the basic structure of the SP has been modified several times in the last decades to improve this issue. However, the compromise between the disturbance rejection speed and the closed-loop robustness limits the improvements that can be achieved. An alternative is using the Active Disturbance Rejection Control (ADRC) combined with a SP structure. However, this technique is not well suited to deal with systems with time delay, and the versions that try to copy with this are relatively complicate. We recently developed a modification of the SP structure that included a new feedback term of the error between the real and the predicted outputs [81]. This scheme showed some advantages in rejecting disturbances as well as a better stability robustness than other SP structures. Then, this scheme is a suitable candidate to be used in our canal pool because it yields a faster disturbance rejection, and its improved robustness allows the control system to deal with the nonlinearities of our canal better than other SP schemes. Moreover, simulations proved that this scheme (in which the linear blocks were substituted by the NARX-ANN blocks in order to better account for the canal nonlinearities) could be further improved by making the gain of that feedback term vary in function of the quotient between the real and the predicted outputs. Then the control scheme implemented in our real canal is [81] but including the feedback term with variable gain that changes according to law (15). Experiments on our canal pool have shown its effectiveness.
These experimental results obtained in the considered real operation scenarios of the studied canal pool show that the designed NARX-ANN-based SP controller outperforms the conventional SP in tracking setpoint changes and rejecting disturbances. Moreover, they show that the proposed NARX-ANN and TD-NARX-ANN models accurately reproduce the canal pool nonlinearities and can be implemented in real time, being more accurate than linearized models while being less computationally involved than more exact models based on the numerical solution of the Saint-Venant equations that cannot be implemented in real time applications.
The NARX-ANN-Based SP controller designed was implemented in the industrial PC installed in the canal pool under study through a program developed in Matlab. This controller communicates via Matlab/OPC (OLE for Process Control) with the SIMATIC S7-300 PLC for real-time data exchange. The OPC technology is based on a Server/Client architecture and provides standards-based communication between PC and PLC.
5. Conclusions
The contribution of this work is a modification of the well-known Smith predictor controller in which the internal linear model has been substituted by the combination of a NARX-ANN-based model and a TD-NARX-ANN-based model, in order to take into account the dynamic nonlinearities in the effective control of water distribution in an irrigation main canal pool.
By application of system identification procedures, NARX-ANN and a TD-NARX-ANN with recurrent architectures have been obtained which describe with high accuracy the non-linear dynamic behavior of the water distribution in the studied canal pool. The NARX-ANN structure with an input layer with 13 memory blocks for the input and output signals, three neurons in the hidden layer and one neuron in the output layer provided the best models performance. A third model which is linear and is represented by a time-delay first order transfer function was obtained using an identification procedure. The validation results of the three models illustrate that the FIT performance indexes of the NARX-ANN-based models are higher than that of the linear model.
In the context of hydraulic engineering, one of the contributions of this paper consists therefore of the fact that accurate nonlinear models based on the NARX-ANN could be obtained for an irrigation main canal pool under different real operation conditions using real-time data and system identification procedures. The results attained are very promising and show that there is great potential for the use of NARX-ANN-based models in depicting the dynamic behavior of irrigation main canal pools. We remark that improving the accuracy of these nonlinear dynamic models has a significant impact on improving the performance of water distribution control systems.
Besides modifying the SP conventional structure by substituting the linear mathematical models by the non-linear NARX-ANN-based models, a gain tuning block of gain has been added that estimates the load disturbance , which is summed to the controller output signal in order to reject the negative effect of the load disturbance on the control system and, thus, increase the controller performance.
The experimental results obtained on the real operation scenarios of the studied canal pool illustrate that our modified NARX-ANN-based SP controller improves the control system performance and therefore satisfies the users water demands in time.
The benefits that are obtained with the increment of water distribution control performance in the main irrigation canal pools are reverted to a better management and rational use of the available hydraulic resources, as well as to a greater environment protection due to the reduction of the current operation water losses.
The proposed NARX-ANN-based SP controller constitutes a simple and attractive option for the accurate water distribution control in the irrigation main canal pools and, therefore, it reveals that there is a great potential in the application of the artificial intelligence to design non-linear control systems for this class of hydraulic processes, as well as to design prediction and decision support systems to optimize the operation of irrigation systems.
This research will be expanded in the future to obtain non-linear NARX-ANN-based models of the remaining canal pools of the ZCAMC, and to use these models in the design and implementation of an integral intelligent water distribution control system for the complete irrigation main canal.
Author Contributions
Conceptualization, R.R.-P. and V.F.-B.; methodology, V.F.-B. and R.R.-P.; software, Y.H.-L.; validation, Y.H.-L.; formal analysis, R.R.-P. and V.F.-B.; writing, review and editing, Y.H.-L., V.F.-B. and R.R.-P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to acknowledge the support provided by the Consejería de Educación, Cultura y Deportes de la Junta de Comunidades de Castilla-La Mancha (Spain) with the Project SBPLY/21/180501/000052.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Aznar-Sánchez, J.A.; Velasco-Muñoz, J.F.; Belmonte-Ureña, L.J.; Manzano-Agugliaro, F. The worldwide research trends on water ecosystem services. Ecol. Indic. 2019, 99, 310–323. [Google Scholar] [CrossRef]
- Wang, H.; Asefa, T.; Bracciano, D.; Adams, A.; Wanakule, N. Proactive water shortage mitigation integrating system optimization and input uncertainty. J. Hydrol. 2019, 571, 711–722. [Google Scholar] [CrossRef]
- Rijsberman, F.R. Water scarcity: Fact or fiction? Agric. Water Manag. 2006, 80, 5–22. [Google Scholar] [CrossRef]
- Savenije, H.H.G. Water scarcity indicators; the deception of the numbers. Phys. Chem. Earth 2000, 25, 199–204. [Google Scholar] [CrossRef]
- Delgado Munevar, W.G. Gestión y valor económico del recurso hídrico. Rev. Finanz. Política Econ. 2015, 2, 279–298. [Google Scholar] [CrossRef]
- Hernández-López, Y.; Rivas-Perez, R.; Feliu-Batlle, V. Automatic control of water distribution in irrigation systems: Review and challenges. Rev. Ing. Electrónica Automática Comun. 2020, 41, 80–97. [Google Scholar]
- Ali, M.H. Fundamentals of Irrigation and On-Farm Water Management; Springer: Berlin, Germany, 2010. [Google Scholar]
- Litrico, X.; Fromion, V. Modeling and Control of Hydrosystems; Springer: London, UK, 2009. [Google Scholar]
- Rivas-Perez, R. Technological Process Control in Main Canals of Irrigation Systems, with Application to Irrigation Systems of Cuba. Ph.D. Thesis, Scientific Research Institute on Land Reclamation and Hydraulic Engineering of Ukrainian Academy of Agricultural Sciences (UkrNIIGIM), Kiev, Ukraine, 1984. [Google Scholar]
- Afzal, M.; Battilani, A.; Solimando, D.; Ragab, R. Improving water resources management using different irrigation strategies and water qualities: Field and modelling study. Agric. Water Manag. 2016, 176, 40–54. [Google Scholar] [CrossRef]
- Wahlin, B.; Zimbelman, D. Canal Automation for Irrigation Systems; American Society of Civil Engineers: Reston, WV, USA, 2014. [Google Scholar]
- Rivas-Perez, R.; Pichuguin, E.D. Synthesis of adaptive control systems of water distribution in main irrigation canals. Land Reclam. Water Manag. 1989, 70, 66–70. [Google Scholar]
- Clemmens, A.J. Canal automation. Resour. Mag. 2006, 13, 7–8. [Google Scholar]
- Rivas-Perez, R. Synthesis of optimal stationary automatic control systems of water distribution in main irrigation canals by means of time delay compensation. Land Reclam. Water Manag. 1991, 74, 77–82. [Google Scholar]
- Lacasta, A.; Morales-Hernandez, M.; Brufau, P.; Garcia-Navarro, P. Simulation of PID control applied to irrigation channels. Procedia Eng. 2014, 70, 978–987. [Google Scholar] [CrossRef]
- Burt, C.M.; Piao, X. Advances in PLC-based irrigation canal automation. Irrig. Drain. 2004, 53, 29–37. [Google Scholar] [CrossRef]
- Arauz, T.; Maestre, J.M.; Tian, X.; Guan, G. Design of PI controllers for irrigation canals based on linear matrix inequalities. Water 2020, 12, 855. [Google Scholar] [CrossRef]
- Bolea, Y.; Puig, V.; Blesa, J. Gain-scheduled Smith predictor PID-based LPV controller for open-flow canal control. IEEE Trans. Control Syst. Technol. 2014, 22, 468–477. [Google Scholar] [CrossRef] [Green Version]
- Feliu-Batlle, V.; Rivas-Perez, R.; Sanchez-Rodriguez, L.; Castillo-García, F.J.; Linarez Saez, A. Robust fractional order PI controller for a main irrigation canal pool. IFAC Proc. Vol. 2008, 41, 15535–15540. [Google Scholar] [CrossRef]
- De Halleux, J.; Prieur, C.; Coron, J.M.; d’Andra Novel, B.; Bastin, G. Boundary feedback control in networks of open channels. Automatica 2003, 39, 1365–1376. [Google Scholar] [CrossRef]
- Astrom, K.; Hagglund, T. Advanced PID Control; Pearson Education, S.A.: Madrid, Spain, 2009. [Google Scholar]
- Rodriguez Vasquez, J.R.; Rivas-Perez, R.; Sotomayor-Moriano, J.J.; Peran-González, J.R. Advanced control system of the steam pressure in a fire-tube boiler. IFAC Proc. Vol. 2008, 41, 11028–11033. [Google Scholar] [CrossRef]
- Diamantis, M.; Papageorgiou, M.; Kosmatopoulos, E.; Chamilothoris, G. Identification and adaptive control for open channel water flow systems. Comput.-Aided Civ. Inf. 2011, 26, 464–480. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, Z.; Zhao, J.; Zheng, H. Constrained model predictive control algorithm for cascaded irrigation canals. J. Irrig. Drain. Eng. 2019, 145, 04019009. [Google Scholar] [CrossRef]
- Fele, F.; Maestre, J.M.; Hashemy, S.M.; de la Peña, D.M.; Camacho, E.F. Coalitional model predictive control of an irrigation canal. J. Process Control 2014, 24, 314–325. [Google Scholar] [CrossRef]
- Kovalienko, P.I.; Matzeliuk, E.M.; Rivas-Perez, R. Adaptive control of water distribution in main irrigation canals with variable time delay. Sci. Res. Hydrotech. Land Reclam. 1990, 32–40. [Google Scholar]
- Shahdany, S.H.; Taghvaeian, S.; Maestre, J.; Firoozfar, A. Developing a centralized automatic control system to increase flexibility of water delivery within predictable and unpredictable irrigation water demands. Comput. Electron. Agric. 2019, 163, 104862. [Google Scholar] [CrossRef]
- Normey-Rico, J.E.; Camacho, E.F. Control of Dead-Time Processes; Springer: London, UK, 2007. [Google Scholar]
- Rodríguez, C.; Normey-Rico, J.E.; Guzmán, J.L.; Berenguel, M. On the filtered Smith predictor with feedforward compensation. J. Process Control 2016, 41, 35–46. [Google Scholar] [CrossRef]
- Benitez, I.O.; Rivas, R.; Feliu, V.; Castillo, F.J. Temperature control based on a modified Smith predictor for injectable drug formulations. IEEE Lat. Am. Trans. 2015, 13, 1041–1047. [Google Scholar] [CrossRef]
- Smith, O.J.M. Closer control of loops with dead time. Chem. Eng. Prog. 1957, 53, 2017–2019. [Google Scholar]
- Kao, T.G.; Nguen, M.; Rivas-Perez, R. Adaptive control of a delay plant by using a nonsearching self adjusting systems with a model. Avtom. Telemekh. 1988, 12, 106–116. [Google Scholar]
- Sanz, R.; García, P.; Albertos, P. A generalized Smith predictor for unstable time-delay SISO systems. ISA Trans. 2018, 72, 197–204. [Google Scholar] [CrossRef] [Green Version]
- Castillo-Garcia, F.; Rivas-Perez, R.; Feliu-Batlle, V. Fractional IIα controller combined with a Smith predictor for effective water distribution in a main irrigation canal pool. IFAC Proc. Vol. 2008, 41, 14558–14563. [Google Scholar] [CrossRef]
- Matausek, M.R. A modified Smith predictor for controlling a process with an integrator and long dead-time. IEEE Trans. Automat. Contr. 1996, 41, 1199–1203. [Google Scholar] [CrossRef]
- Shand, M.J. Automatic downstream control systems for irrigation canals. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1971. [Google Scholar]
- Deltour, J.L. Application de L’automatique Numérique à la Régulation des Canaux; Proposition D’une Méthodologie D’etude. Thèse de Doctorat, Institut National Polytechnic de Grenoble, Grenoble, France, 1992. [Google Scholar]
- Sanfilippo, F. Application du Régulateur PIR au cas des Canaux à Forte Pente; DEA de l’Université Claude Bernard: Lyon, France, 1993. [Google Scholar]
- Chaudhry, M.H. Open-Channel Flow, 2nd ed.; Springer: New York, NY, USA, 2008. [Google Scholar]
- Calderon-Valdez, S.N.; Feliu-Batlle, V.; Rivas-Perez, R. Fractional-order mathematical model of an irrigation main canal pool. Span. J. Agric. Res. 2015, 13, e0212. [Google Scholar] [CrossRef]
- Billings, S.A. Nonlinear System Identification: NARMAX Methods in the Time, Frequency, and Spatio-Temporal Domains; John Wiley & Sons: New Jersey, NJ, USA, 2013. [Google Scholar]
- Chen, S.; Billings, S.; Grant, P. Non-linear system identification using neural networks. Int. J. Control 1990, 51, 1191–1214. [Google Scholar] [CrossRef]
- Medsker, L.R.; Jain, L.C. Recurrent Neural Networks. Design and Applications; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Nikolaou, M.; Hanagandi, V. Control of nonlinear dynamical systems modeled by recurrent neural networks. AICHE J. 1993, 39, 1890–1894. [Google Scholar] [CrossRef]
- Taherdangkoo, R.; Tatomir, A.; Taherdangkoo, M.; Qiu, P.; Sauter, M. Nonlinear autoregressive neural networks to predict hydraulic fracturing fluid leakage into shallow groundwater. Water 2020, 12, 841. [Google Scholar] [CrossRef]
- Tan, Y.; Van Cauwenberghe, A. Nonlinear neural controller with neural Smith predictor. Neural Process Lett. 1994, 1, 24–27. [Google Scholar] [CrossRef]
- Calderon, E.M.; Rivas, R.; Sotomayor, J. Design of neuro-fuzzy controller for control of water distribution in an irrigation main canal. IEEE Lat. Am. Trans. 2016, 14, 471–476. [Google Scholar] [CrossRef]
- Chen, H.; Zouaoui, Z.; Chen, Z. A modified Smith predictive scheme based back-propagation neural network approach for FOPDT processes control. J. Process Control 2013, 23, 1261–1269. [Google Scholar] [CrossRef]
- Choi, H.J.; Jung, S. Neural network-based Smith predictor design for the time-delay in a teleoperated control system. Artif. Life Robot 2009, 14, 578–583. [Google Scholar] [CrossRef]
- Hernández, Y.; Feliu, V.; Rivas, R. Artificial neural network based system identification of an irrigation main canal pool. IEEE Lat. Am. Trans. 2017, 15, 1595–1600. [Google Scholar] [CrossRef]
- Pourfard, A.; Moetamedzadeh, H.; Madoliat, R.; Khanmirza, E. Design of a neural network based predictive controller for natural gas pipelines in transient state. J. Nat. Gas Sci. Eng. 2019, 62, 275–293. [Google Scholar] [CrossRef]
- Huang, J.; Lewis, F.L. Neural-network predictive control for non-linear dynamic systems with time-delay. IEEE Trans. Neural Netw. 2003, 14, 377–389. [Google Scholar] [CrossRef]
- Norgaard, M.; Ravn, O.; Poulsen, N.K.; Hansen, L.K. Neural Networks for Modelling and Control of Dynamic Systems; Springer: London, UK, 2000. [Google Scholar]
- Narendra, K.S.; Parthasarathy, K. Identification and control of dynamical systems using neural networks. IEEE Trans. Neural Netw. 1990, 1, 4–27. [Google Scholar] [CrossRef] [PubMed]
- Boussaada, Z.; Curea, O.; Remaci, A.; Camblong, H.; Bellaaj, N.M. A nonlinear autoregressive exogenous (NARX) neural network model for the prediction of the daily direct solar radiation. Energies 2018, 11, 620. [Google Scholar] [CrossRef]
- Alsumaiei, A.A. A nonlinear autoregressive modeling approach for forecasting groundwater level fluctuation in urban aquifers. Water 2020, 12, 820. [Google Scholar] [CrossRef]
- Ezzeldin, R.; Hatata, A. Application of NARX neural network model for discharge prediction through lateral orifices. Alex. Eng. J. 2018, 57, 2991–2998. [Google Scholar] [CrossRef]
- Argyropoulos, D.; Paraforos, D.S.; Alex, R.; Griepentrog, H.W.; Müller, J. NARX neural network modelling of mushroom dynamic vapour sorption kinetics. IFAC-PapersOnLine 2016, 49, 305–310. [Google Scholar] [CrossRef]
- Alimohammadi, H.; Alagoz, B.B.; Tepljakov, A.; Vassiljeva, K.; Petlenkov, E. A NARX model reference adaptive control scheme: Improved disturbance rejection fractional-order PID control of an experimental magnetic levitation system. Algorithms 2020, 13, 201. [Google Scholar] [CrossRef]
- Li, H.; Chen, S. A neural-network-based model predictive control scheme for grain dryers. Dry. Technol. 2020, 38, 1079–1091. [Google Scholar] [CrossRef]
- De Giorgi, M.G.; Strafella, L.; Ficarella, A. Neural nonlinear autoregressive model with exogenous input (NARX) for turboshaft aeroengine fuel control unit model. Aerospace 2021, 8, 206. [Google Scholar] [CrossRef]
- Alkhaldi, T.M.N. A novel control strategy for shunt active power filter using NARX Neural Network. Int. J. Eng. Res. Appl. 2018, 8, 24–30. [Google Scholar]
- Manonmani, A.; Thyagarajan, T.; Elango, M.; Sutha, S. Modelling and control of greenhouse system using neural networks. Trans. Inst. Meas. Control 2018, 40, 918–929. [Google Scholar] [CrossRef]
- Medi, B.; Asadbeigi, A. Application of a GA-Optimized NNARX controller to nonlinear chemical and biochemical processes. Heliyon 2021, 7, e07846. [Google Scholar] [CrossRef] [PubMed]
- Katic, K.; Li, R.; Verhaart, J.; Zeiler, W. Neural network based predictive control of personalized heating systems. Energy Build. 2018, 174, 199–213. [Google Scholar] [CrossRef]
- Tan, Y.; Cauwenberghe, A.V. Neural-network-based d-step-ahead predictors for nonlinear systems with time delay. Eng. Appl. Artif. Intell. 1999, 12, 21–35. [Google Scholar] [CrossRef]
- García Láinez, D.; Jiménez Gavilán, P. Propuesta preliminar de caudales de recuperación y conservación del ecosistema del río Zaza aguas abajo de la presa Zaza (Cuba). In Proceedings of the I International Conference on Water and Sustainability, Barcelona-Terrassa, Spain, 26–27 June 2016; pp. 111–113. [Google Scholar]
- Miranda Castañeda, L.F. Diagnóstico de la situación de la intrusión marina al sur de Ciego de Ávila. Ing. Hidráulica Ambient. 2012, 33, 106–118. [Google Scholar]
- Ljung, L. System Identification. Theory for the User; Prentice-Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Rivas-Perez, R.; Feliu-BatIle, V.; Castillo-Garcia, F.; Sanchez-Rodriguez, L.; Linares-Saez, A. Robust fractional order controller implemented in the first pool of the Imperial de Aragon main canal. Tecnol. Cienc. Del Agua 2014, 5, 23–42. [Google Scholar]
- Pham, D.T.; Liu, X. Neural Networks for Identification, Prediction and Control; Springer: London, UK, 1995. [Google Scholar]
- Lin, T.N.; Lee, G.C.; Horne, B.G.; Kung, S.Y. A delay damage model selection algorithm for NARX neural network. IEEE Trans. Signal Process 1997, 45, 2719–2730. [Google Scholar]
- Yazdizadeh, A.; Khorasani, K. Adaptive time delay neural network structures for nonlinear system identification. Neurocomputing 2002, 47, 207–240. [Google Scholar] [CrossRef]
- Azzaro, J.E.; Veiga, R.A. Sliding mode controller with neural network identification. IEEE. Lat. Am. Trans. 2015, 13, 3754–3757. [Google Scholar] [CrossRef]
- Hagan, M.T.; Menhaj, M.B. Training feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Nelles, O. Nonlinear System Identification from Classical Approaches to Neural Networks, Fuzzy Models, and Gaussian Processes, 2nd ed.; Springer: Berlin, Germany, 2001. [Google Scholar]
- Feliu-Batlle, V.; Rivas-Perez, R.; Castillo-García, F. Design of a PIα controller for the robust control of the steam pressure in the steam drum of a bagasse-fired boiler. IEEE Access 2021, 9, 95123–95134. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering, 5th ed.; Prentice Hall: New Jersey, NJ, USA, 2010. [Google Scholar]
- Ogata, K. Discrete Time Control Systems, 2nd ed.; Prentice Hall: New Jersey, NJ, USA, 1995. [Google Scholar]
- Feliu-Batlle, V.; Rivas-Perez, R. Control of the temperature in a petroleum refinery heating furnace based on a robust modified Smith predictor. ISA Trans. 2021, 112, 251–270. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
A view of Zaza-Ciego de Avila Main Canal (ZCAMC).

Figure 2.
Schematic diagram of the first pool in ZCAMC, where LS is a level sensor, GPS is a gate position sensor, PLC is a programmable logic controller, are the water flows; is the gate position, is the lateral discharge, is the water level setpoint.
Figure 2.
Schematic diagram of the first pool in ZCAMC, where LS is a level sensor, GPS is a gate position sensor, PLC is a programmable logic controller, are the water flows; is the gate position, is the lateral discharge, is the water level setpoint.

Figure 3.
Architecture of the NARX-ANN-based model designed.

Figure 4.
Architecture of the TD-NARX-ANN-based model designed.

Figure 5.
The obtained data set of the irrigation canal pool studied.

Figure 6.
Validation results of the NARX-ANN and TD-NARX-ANN-based models with the validation and testing data sets.
Figure 6.
Validation results of the NARX-ANN and TD-NARX-ANN-based models with the validation and testing data sets.

Figure 7.
Validation results of the obtained linear mathematical model.

Figure 8.
Conventional structure of the SP.

Figure 9.
Proposed modified structure of the SP.

Figure 10.
Architecture of the designed nonlinear ANN PI controller.

Figure 11.
Experimental comparative time responses to a setpoint change of the water distribution control system with both designed controllers.
Figure 11.
Experimental comparative time responses to a setpoint change of the water distribution control system with both designed controllers.

Figure 12.
Experimental comparative output signals of the controllers designed.

Figure 13.
Experimental comparative time responses to the effect of external load disturbance of the water distribution control system with the controllers designed.
Figure 13.
Experimental comparative time responses to the effect of external load disturbance of the water distribution control system with the controllers designed.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Experimental comparative results to setpoint change yielded by the water distribution control system with both designed controllers.
Table 1.
Experimental comparative results to setpoint change yielded by the water distribution control system with both designed controllers.
| Controller | MP (%) | Eee | Tr (s) | Ts (s) |
|---|---|---|---|---|
| NARX-ANN-based SP | 1.0 | 0 | 1150 | 1700 |
| Conventional SP | 0 | 0 | 2000 | 3500 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Hernandez-Lopez, Y.; Rivas-Perez, R.; Feliu-Batlle, V. Design of a NARX-ANN-Based SP Controller for Control of an Irrigation Main Canal Pool. Appl. Sci. 2022, 12, 9180. https://0-doi-org.brum.beds.ac.uk/10.3390/app12189180
AMA Style
Hernandez-Lopez Y, Rivas-Perez R, Feliu-Batlle V. Design of a NARX-ANN-Based SP Controller for Control of an Irrigation Main Canal Pool. Applied Sciences. 2022; 12(18):9180. https://0-doi-org.brum.beds.ac.uk/10.3390/app12189180
Chicago/Turabian StyleHernandez-Lopez, Ybrain, Raul Rivas-Perez, and Vicente Feliu-Batlle. 2022. "Design of a NARX-ANN-Based SP Controller for Control of an Irrigation Main Canal Pool" Applied Sciences 12, no. 18: 9180. https://0-doi-org.brum.beds.ac.uk/10.3390/app12189180
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.