Parsimonious Network Based on a Fuzzy Inference System (PANFIS) for Time Series Feature Prediction of Low Speed Slew Bearing Prognosis

 ,
,  and
and
Abstract
:Featured Application
Abstract
1. Introduction
2. Classification of Prognosis Approaches
3. Experimental Setup
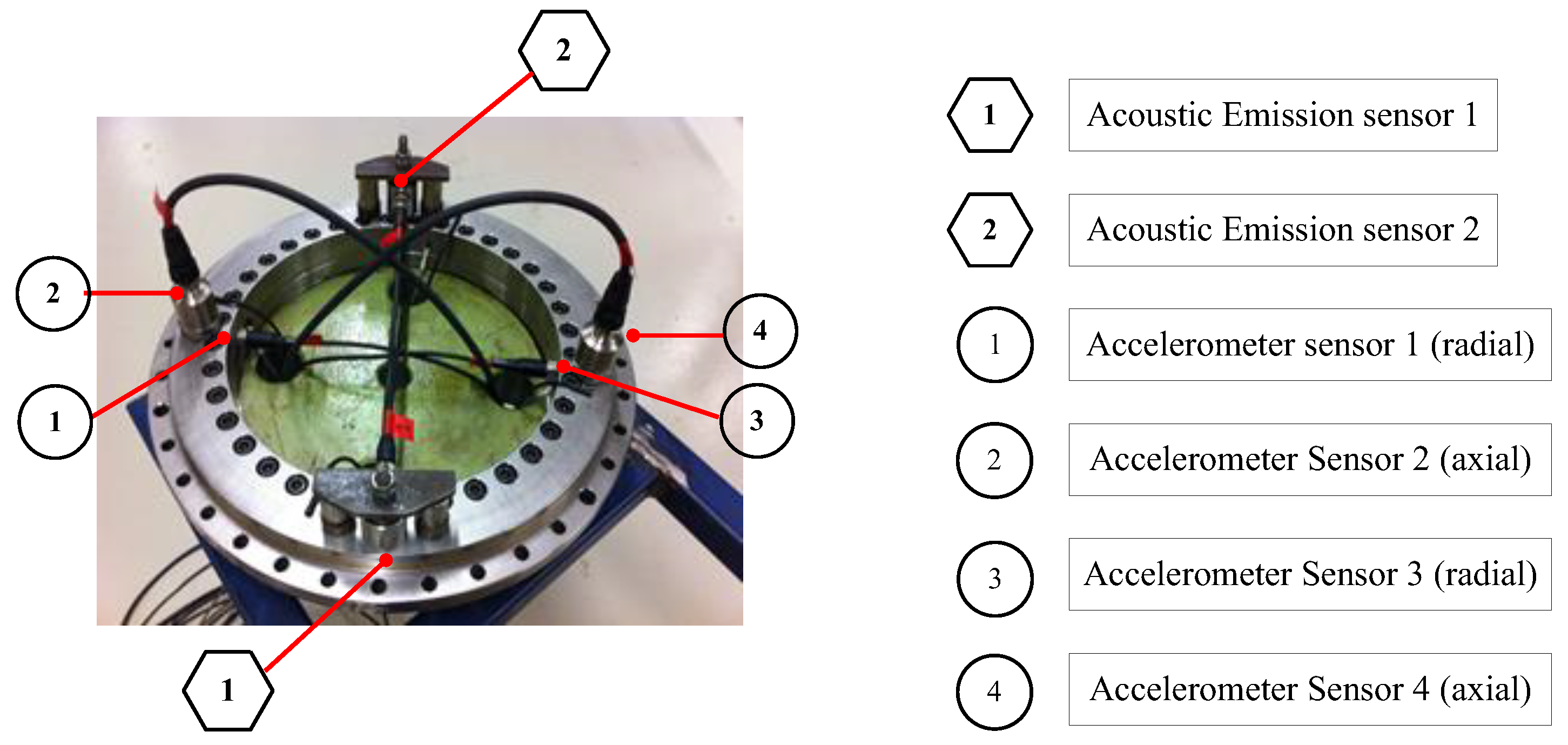
3.1. Slew Bearing Test-Rig and Data Acquisition
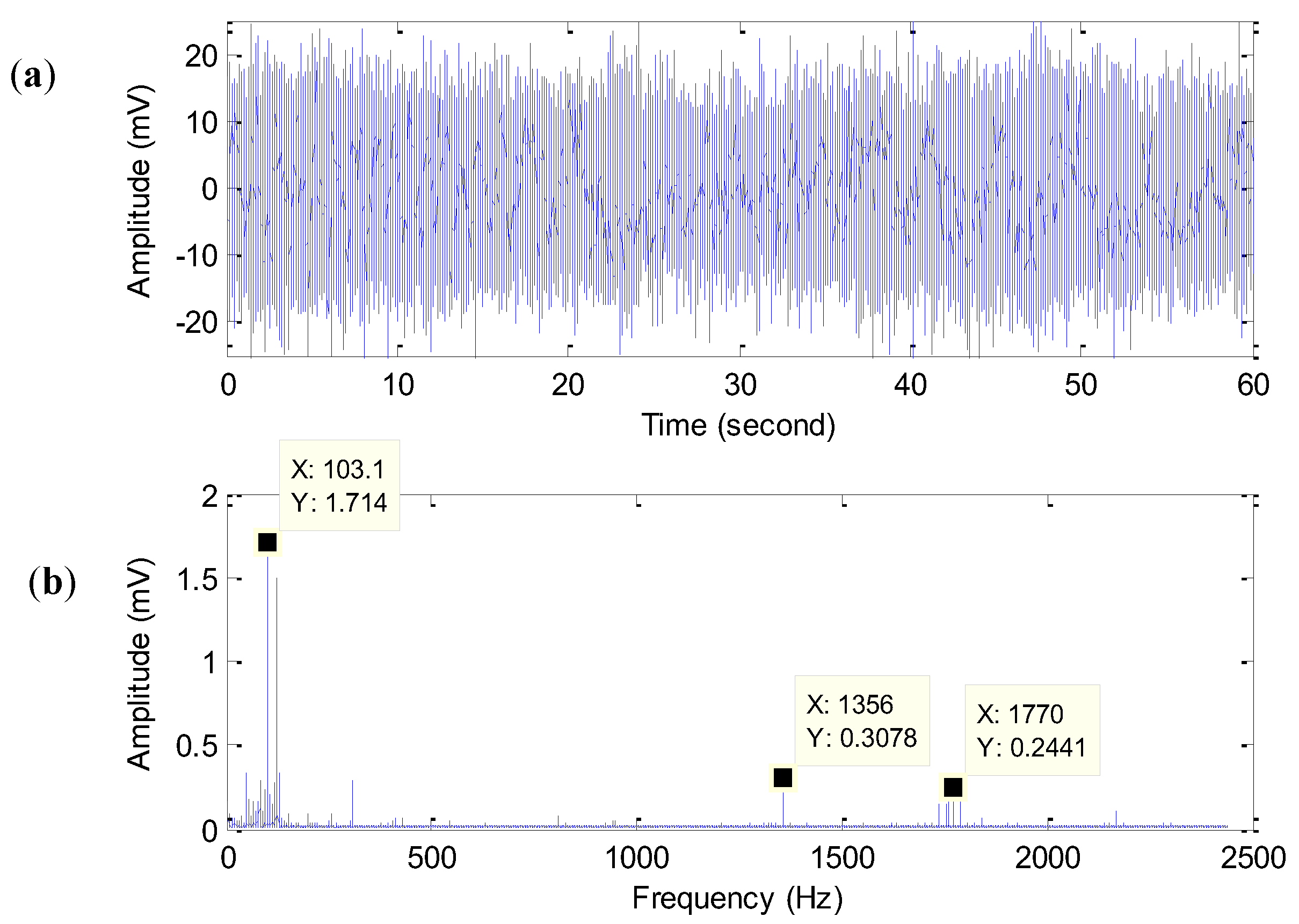
3.2. Vibration Signals
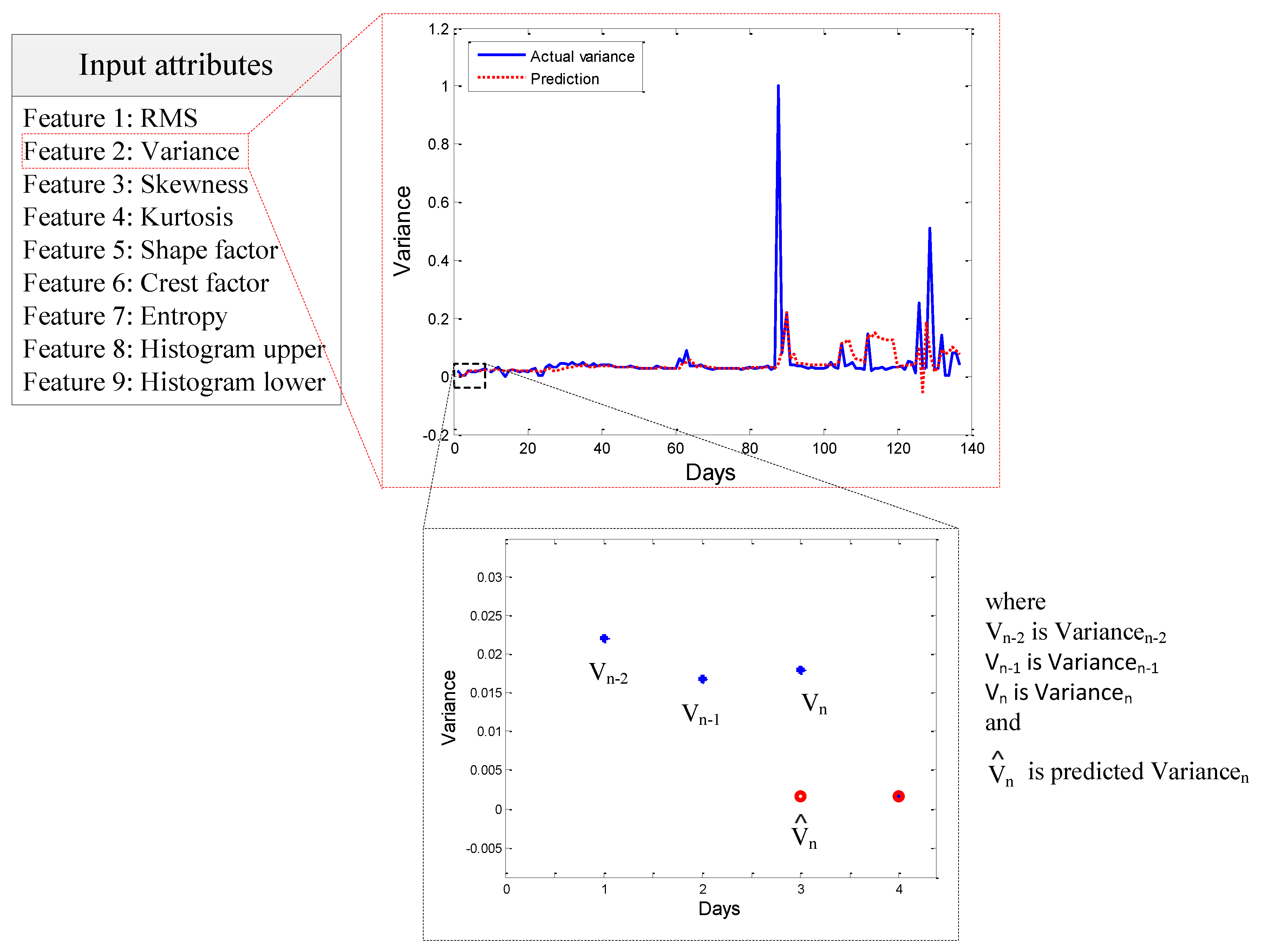
3.3. Feature Extraction
4. Parsimonious Network Based on Fuzzy Inference System (PANFIS)
4.1. Network Architecture of PANFIS
4.2. Rule Growing Mechanism of PANFIS
4.3. Rule Pruning Scenario of PANFIS
4.4. Fuzzy Set Extraction and Merging Scenario
4.5. Adaptation of Rule Consequent
5. Time-Series Feature Prediction
5.1. Direct Mode Prediction
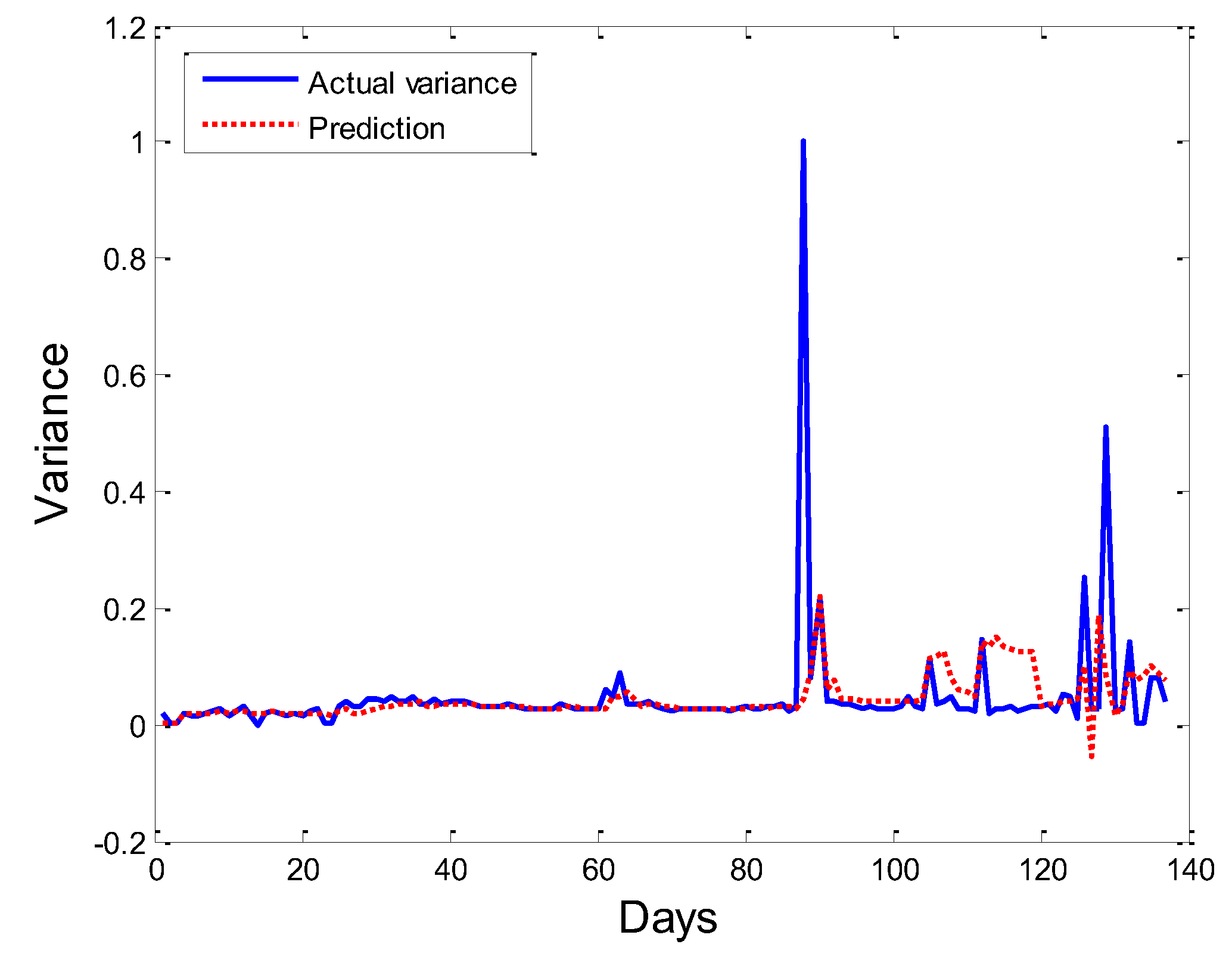
5.2. Time-Series Mode Prediction
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, W. A two-stage prognosis model in condition based maintenance. Eur. J. Oper. Res. 2007, 182, 1177–1187. [Google Scholar] [CrossRef]
- Angelov, P.P.; Filev, D.P. An approach to online identification of Takagi-Sugeno fuzzy models. IEEE Trans. Syst. Man Cybern. Part B 2004, 34, 484–498. [Google Scholar] [CrossRef]
- Kasabov, N.K.; Song, Q. DENFIS: Dynamic evolving neural-fuzzy inference system and its application for time-series prediction. IEEE Trans. Fuzzy Syst. 2002, 10, 144–154. [Google Scholar] [CrossRef]
- Lughofer, E.; Cernuda, C.; Kindermann, S.; Pratama, M. Generalized smart evolving fuzzy systems. Evol. Syst. 2015, 6, 269–292. [Google Scholar] [CrossRef]
- Pratama, M.; Anavatti, S.G.; Lughofer, E. GENEFIS: Toward an effective localist network. IEEE Trans. Fuzzy Syst. 2014, 22, 547–562. [Google Scholar] [CrossRef]
- Rong, H.-J.; Sundararajan, N.; Huang, G.-B.; Saratchandran, P. Sequential adaptive fuzzy inference system (SAFIS) for nonlinear system identification and prediction. Fuzzy Sets Syst. 2006, 157, 1260–1275. [Google Scholar] [CrossRef]
- Angelov, P.; Filev, D. Simpl_eTS: A simplified method for learning evolving Takagi-Sugeno fuzzy models. In Proceedings of the 14th IEEE International Conference on Fuzzy Systems, Reno, NV, USA, 25 May 2005; pp. 1068–1073. [Google Scholar]
- Oentaryo, R.J.; Er, M.J.; San, L.; Zhai, L.; Li, X. Bayesian ART-based fuzzy inference system: A new approach to prognosis of machining processes. In Proceedings of the 2011 IEEE Conference on Prognostics and Health Management, Montreal, QC, Canada, 20–23 June 2011; pp. 1–10. [Google Scholar]
- Pan, Y.; Er, M.J.; Li, X.; Yu, H.; Gouriveau, R. Machine health condition prediction via online dynamic fuzzy neural networks. Eng. Appl. Artif. Intell. 2014, 35, 105–113. [Google Scholar] [CrossRef]
- Lemos, A.; Caminhas, W.; Gomide, F. Adaptive fault detection and diagnosis using an evolving fuzzy classifier. Inf. Sci. 2013, 220, 64–85. [Google Scholar] [CrossRef]
- Pratama, M.; Anavatti, S.G.; Angelov, P.P.; Lughofer, E. PANFIS: A novel incremental learning machine. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 55–68. [Google Scholar] [CrossRef]
- Huang, G.-B.; Saratchandran, P.; Sundararajan, N. A generalized growing and pruning RBF (GGAP-RBF) neural network for function approximation. IEEE Trans. Neural Netw. 2005, 16, 57–67. [Google Scholar] [CrossRef] [PubMed]
- Leng, G.; Prasad, G.; McGinnity, T.M. An on-line algorithm for creating self-organizing fuzzy neural networks. Neural Netw. 2004, 17, 1477–1493. [Google Scholar] [CrossRef] [PubMed]
- Caesarendra, W.; Wijaya, T.; Tjahjowidodo, T.; Pappachan, B.K.; Wee, A.; Roslan, M.I. Adaptive neuro-fuzzy inference system for deburring stage classification and prediction for indirect quality monitoring. Appl. Soft Comput. 2018, 72, 565–578. [Google Scholar] [CrossRef]
- Grzegorzewski, P. On Separability of Fuzzy Relations. Int. J. Fuzzy Log. Intell. Syst. 2017, 17, 137–144. [Google Scholar] [CrossRef] [Green Version]
- Novak, V. Detection of Structural Breaks in Time Series Using Fuzzy Techniques. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Rohan, A.; Rabah, M.; Kim, S.H. An Integrated Fault Detection and Identification System for Permanent Magnet Synchronous Motor in Electric Vehicles. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 20–28. [Google Scholar] [CrossRef]
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications. Mech. Syst. Signal Process. 2014, 42, 314–334. [Google Scholar] [CrossRef]
- Jardine, A.K.S.; Lin, D.; Banjevic, D. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Kothamasu, R.; Huang, S.H.; VerDuin, W.H. System health monitoring and prognostics—A review of current paradigms and practices. Int. J. Adv. Manuf. Technol. 2006, 28, 1012–1024. [Google Scholar] [CrossRef]
- Heng, A.; Zhang, S.; Tan, A.C.C.; Mathew, J. Rotating machinery prognostics: State of the art, challenges and opportunities. Mech. Syst. Signal Process. 2009, 23, 724–739. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Caesarendra, W. Vibration and Acoustic Emission-Based Condition Monitoring and Prognostic Methods for very Low Speed Slew Bearing. Ph.D. Thesis, University of Wollongong, Wollongong, Australia, 15 December 2015. [Google Scholar]
- Li, Y.; Billington, S.; Zhang, C.; Kurfess, T.; Danyluk, S.; Liang, S. Adaptive prognostics for rolling element bearing condition. Mech. Syst. Signal Process. 1999, 13, 103–113. [Google Scholar] [CrossRef]
- Li, Y.; Kurfess, T.R.; Liang, S.Y. Stochastic prognostics for rolling element bearings. Mech. Syst. Signal Process. 2000, 14, 747–762. [Google Scholar] [CrossRef]
- Qiu, J.; Zhang, C.; Seth, B.B.; Liang, S.Y. Damage mechanics approach for bearing lifetime prognostics. Mech. Syst. Signal Process. 2002, 16, 817–829. [Google Scholar] [CrossRef]
- Lim, C.K.R.; Mba, D. Switching Kalman filter for failure prognostic. Mech. Syst. Signal Process. 2015, 52, 426–435. [Google Scholar] [CrossRef]
- Caesarendra, W.; Niu, G.; Yang, B.S. Machine condition prognosis based on sequential Monte Carlo method. Expert Syst. Appl. 2010, 37, 2412–2420. [Google Scholar] [CrossRef]
- Boškoski, P.; Gašperin, M.; Petelin, D.; Juričić, Đ. Bearing fault prognostics using Rényi entropy based features and Gaussian process models. Mech. Syst. Signal Process. 2015, 52, 327–337. [Google Scholar] [CrossRef]
- Vlok, P.-J.; Wnek, M.; Zygmunt, M. Utilising statistical residual life estimates of bearings to quantify the influence of preventive maintenance actions. Mech. Syst. Signal Process. 2004, 18, 833–847. [Google Scholar] [CrossRef]
- Sun, Y.; Ma, L.; Mathew, J.; Wang, W.; Zhang, S. Mechanical systems hazard estimation using condition monitoring. Mech. Syst. Signal Process. 2006, 20, 1189–1201. [Google Scholar] [CrossRef]
- Wang, W. A model to predict the residual life of rolling element bearings given monitored condition information to date. IMA J. Manag. Math. 2002, 13, 3–16. [Google Scholar] [CrossRef]
- Caesarendra, W.; Widodo, A.; Yang, B.S. Combination of probability approach and support vector machine towards machine health prognostics. Probab. Eng. Mech. 2011, 26, 165–173. [Google Scholar] [CrossRef]
- Tran, V.T.; Pham, H.T.; Yang, B.S.; Nguyen, T.T. Machine performance degradation assessment and remaining useful life prediction using proportional hazard model and support vector machine. Mech. Syst. Signal Process. 2012, 32, 320–330. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Xiaodiao, H.; Jie, C.; Hua, W.; Rongjing, H. Reliability-based residual life prediction of large-size low-speed slewing bearings. Mech. Mach. Theory 2014, 81, 94–106. [Google Scholar]
- Zhang, X.; Xu, R.; Kwan, C.; Liang, S.Y.; Xie, Q.; Haynes, L. An integrated approach to bearing fault diagnostics and prognostics. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 2750–2755. [Google Scholar]
- Ocak, H.; Loparo, K.A.; Discenzo, F.M. Online tracking of bearing wear using wavelet packet decomposition and probabilistic modeling: A method for bearing prognostics. J. Sound Vib. 2007, 302, 951–961. [Google Scholar] [CrossRef]
- Shao, Y.; Nezu, K. Prognosis of remaining bearing life using neural networks. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2000, 214, 217–230. [Google Scholar] [CrossRef]
- Gebraeel, N.; Lawley, M.; Liu, R.; Parmeshwaran, V. Residual life predictions from vibration-based degradation signals: A neural network approach. IEEE Trans. Ind. Electron. 2004, 51, 694–700. [Google Scholar] [CrossRef]
- Jantunen, E. Prognosis of rolling bearing failure based on regression analysis and fuzzy Logic. J. Vib. Eng. Technol. 2006, 5, 97–108. [Google Scholar]
- Li, D.Z.; Wang, W. An enhanced GA technique for system training and prognostics. Adv. Eng. Softw. 2011, 42, 452–462. [Google Scholar] [CrossRef]
- Kosasih, B.; Caesarendra, W.; Tieu, K.; Widodo, A.; Moodie, C.A.S. Degradation trend estimation and prognosis of large low speed slewing bearing lifetime. Appl. Mech. Mater. 2014, 493, 343–348. [Google Scholar] [CrossRef]
- Niu, G.; Yang, B.S. Dempster-Shafer regression for multi-step-ahead time-series prediction towards data-driven machinery prognosis. Mech. Syst. Signal Process. 2009, 23, 740–751. [Google Scholar] [CrossRef]
- Pham, H.T.; Yang, B.S. Estimation and forecasting of machine health condition using ARMA/GARCH model. Mech. Syst. Signal Process. 2010, 24, 546–558. [Google Scholar] [CrossRef]
- Caesarendra, W.; Widodo, A.; Yang, B.S. Application of relevance vector machine and logistic regression for machine degradation assessment. Mech. Syst. Signal Process. 2010, 24, 1161–1171. [Google Scholar] [CrossRef]
- Maio, F.D.; Tsui, K.L.; Zio, E. Combining relevance vector machines and exponential regression for bearing residual life estimation. Mech. Syst. Signal Process. 2012, 31, 405–427. [Google Scholar] [CrossRef]
- Widodo, A.; Yang, B.S. Machine health prognostics using survival probability and support vector machine. Expert Syst. Appl. 2011, 38, 8430–8437. [Google Scholar] [CrossRef]
- Widodo, A.; Yang, B.S. Application of relevance vector machine and survival probability to machine degradation assessment. Expert Syst. Appl. 2011, 38, 2592–2599. [Google Scholar] [CrossRef]
- Ali, J.B.; Chebel-Morello, B.; Saidi, L.; Malinowski, S. Accurate bearing remaining useful life prediction based on Weibull distribution and artificial neural network. Mech. Syst. Signal Process. 2015, 56–57, 150–172. [Google Scholar]
- Caesarendra, W.; Tjahjowidodo, T. A review of feature extraction methods in vibration-based condition monitoring and its application for degradation trend estimation of low-speed slew bearing. Machines 2017, 5, 21. [Google Scholar] [CrossRef]
- Jafari, R.; Yu, W. Fuzzy modeling for uncertainty nonlinear systems with fuzzy equations. Math. Probl. Eng. 2017, 2017, 1–10. [Google Scholar] [CrossRef]
- Wu, S.; Er, M.J. Dynamic fuzzy neural networks-a novel approach to function approximation. IEEE Trans. Syst. Man Cybern. Part B 2000, 30, 358–364. [Google Scholar]
- Wu, S.; Er, M.J.; Gao, Y. A fast approach for automatic generation of fuzzy rules by generalized dynamic fuzzy neural networks. IEEE Trans. Fuzzy Syst. 2001, 9, 578–594. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Classification | Method or Algorithm | Features |
|---|---|---|---|
| 1 | Model-based approaches:
| N/A N/A N/A RMS and envelope | |
| 2 | Reliability-based method and probability models: | Rényi entropy Kurtosis Principal features N/A N/A N/A RMS Peak-to-peak, energy and kurtosis | |
| 3 | Data-driven approaches:
| N/A N/A Monitoring index RMS, skewness, kurtosis RMS RMS and envelope RMS and envelope Kurtosis RMS | |
| 4 | Data-driven + reliability-based methods | Kurtosis Peak value and RMS Kurtosis Kurtosis RMS, kurtosis and entropy estimation |
| Input Feature | Description | PANFIS | eTS | Simp_eTS | ANFIS |
|---|---|---|---|---|---|
| RMS | RMSE (%) | 0.03 | 0.04 | 0.25 | 0.32 |
| Rule | 1 | 5 | 2 | 2 | |
| Fuzzy set | 8 | 40 | 16 | 16 | |
| Time (s) | 0.41 | 0.12 | 0.15 | N/A | |
| Variance | RMSE (%) | 0.04 | 0.04 | 0.21 | 0.11 |
| Rule | 1 | 5 | 2 | 2 | |
| Fuzzy set | 8 | 40 | 16 | 16 | |
| Time (s) | 0.43 | 0.13 | 0.15 | N/A | |
| Skewness | RMSE (%) | 0.11 | 0.21 | 0.25 | 0.33 |
| Rule | 8 | 5 | 2 | 2 | |
| Fuzzy set | 64 | 40 | 16 | 16 | |
| Time (s) | 0.61 | 0.09 | 0.15 | N/A | |
| Kurtosis | RMSE (%) | 0.05 | 0.27 | 0.43 | 0.09 |
| Rule | 1 | 5 | 2 | 2 | |
| Fuzzy set | 8 | 40 | 16 | 16 | |
| Time (s) | 0.49 | 0.13 | 1.1 | N/A | |
| Shape factor | RMSE (%) | 0.006 | 0.05 | 0.11 | 0.33 |
| Rule | 1 | 5 | 2 | 2 | |
| Fuzzy set | 8 | 40 | 16 | 16 | |
| Time (s) | 0.52 | 0.19 | 1.36 | N/A | |
| Crest factor | RMSE (%) | 0.14 | 0.23 | 0.79 | 8.69 |
| Rule | 5 | 5 | 2 | 2 | |
| Fuzzy set | 40 | 40 | 16 | 16 | |
| Time (s) | 0.35 | 0.1 | 1.29 | N/A | |
| Entropy | RMSE (%) | 0.14 | 0.22 | 0.79 | 0.15 |
| Rule | 5 | 5 | 2 | 2 | |
| Fuzzy set | 39 | 40 | 16 | 16 | |
| Time (s) | 0.64 | 0.13 | 1.4 | N/A | |
| Histogram upper | RMSE (%) | 0.08 | 0.3 | 0.28 | 0.1 |
| Rule | 1 | 5 | 2 | 2 | |
| Fuzzy set | 8 | 40 | 16 | 16 | |
| Time (s) | 0.57 | 0.15 | 1.01 | N/A | |
| Histogram lower | RMSE (%) | 0.05 | 0.37 | 0.35 | 0.54 |
| Rule | 1 | 5 | 2 | 2 | |
| Fuzzy set | 8 | 40 | 16 | 16 | |
| Time (s) | 0.4 | 0.15 | 1.2 | N/A |
| Input Feature | Description | PANFIS | eTS | Simp_eTS | ANFIS |
|---|---|---|---|---|---|
| RMS | RMSE (%) | 0.1 | 0.11 | 0.13 | 0.1 |
| Rule | 2 | 5 | 2 | 2 | |
| Fuzzy set | 2-2 | 5-5 | 2-2 | 2-2 | |
| Time (s) | 0.73 | 0.54 | 1.54 | N/A | |
| Variance | RMSE (%) | 0.09 | 0.11 | 0.14 | 0.09 |
| Rule | 6 | 4 | 2 | 2 | |
| Fuzzy set | 6-5 | 4-4 | 2-2 | 2-2 | |
| Time (s) | 1.1 | 0.17 | 1.36 | N/A | |
| Skewness | RMSE (%) | 0.08 | 0.09 | 0.09 | 0.12 |
| Rule | 2 | 5 | 4 | 2 | |
| Fuzzy set | 2-2 | 5-5 | 4-4 | 2-2 | |
| Time (s) | 0.78 | 0.12 | 1.42 | N/A | |
| Kurtosis | RMSE (%) | 0.13 | 0.13 | 0.18 | 0.11 |
| Rule | 16 | 6 | 3 | 2 | |
| Fuzzy set | 16-16 | 6-6 | 3-3 | 2-2 | |
| Time (s) | 0.49 | 0.09 | 1.72 | N/A | |
| Shape factor | RMSE (%) | 0.11 | 0.09 | 0.09 | 0.06 |
| Rule | 4 | 5 | 2 | 2 | |
| Fuzzy set | 4-3 | 5-5 | 2-2 | 2-2 | |
| Time (s) | 0.55 | 0.17 | 1.4 | N/A | |
| Crest factor | RMSE (%) | 0.09 | 0.14 | 0.14 | 0.12 |
| Rule | 3 | 6 | 7 | 2 | |
| Fuzzy set | 3-3 | 6-6 | 7-7 | 2-2 | |
| Time (s) | 0.49 | 0.15 | 2.1 | N/A | |
| Entropy | RMSE (%) | 0.11 | 0.14 | 0.15 | 0.11 |
| Rule | 6 | 6 | 5 | 2 | |
| Fuzzy set | 6-6 | 6-6 | 5-5 | 2-2 | |
| Time (s) | 0.51 | 0.12 | 1.81 | N/A | |
| Histogram upper | RMSE (%) | 0.13 | 0.15 | 0.16 | 0.12 |
| Rule | 7 | 8 | 6 | 2 | |
| Fuzzy set | 7-7 | 8-8 | 6-6 | 2-2 | |
| Time (s) | 0.69 | 0.19 | 1.7 | N/A | |
| Histogram lower | RMSE (%) | 0.14 | 0.16 | 0.2 | 0.14 |
| Rule | 2 | 8 | 5 | 2 | |
| Fuzzy set | 2-2 | 8-8 | 5-5 | 2-2 | |
| Time (s) | 0.52 | 0.15 | 1.5 | N/A |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caesarendra, W.; Pratama, M.; Kosasih, B.; Tjahjowidodo, T.; Glowacz, A. Parsimonious Network Based on a Fuzzy Inference System (PANFIS) for Time Series Feature Prediction of Low Speed Slew Bearing Prognosis. Appl. Sci. 2018, 8, 2656. https://0-doi-org.brum.beds.ac.uk/10.3390/app8122656
Caesarendra W, Pratama M, Kosasih B, Tjahjowidodo T, Glowacz A. Parsimonious Network Based on a Fuzzy Inference System (PANFIS) for Time Series Feature Prediction of Low Speed Slew Bearing Prognosis. Applied Sciences. 2018; 8(12):2656. https://0-doi-org.brum.beds.ac.uk/10.3390/app8122656
Chicago/Turabian StyleCaesarendra, Wahyu, Mahardhika Pratama, Buyung Kosasih, Tegoeh Tjahjowidodo, and Adam Glowacz. 2018. "Parsimonious Network Based on a Fuzzy Inference System (PANFIS) for Time Series Feature Prediction of Low Speed Slew Bearing Prognosis" Applied Sciences 8, no. 12: 2656. https://0-doi-org.brum.beds.ac.uk/10.3390/app8122656