New Evolutionary-Based Techniques for Image Registration


Computer Science Department, Bucharest University of Economics, 010374 Bucharest, Romania
*
Author to whom correspondence should be addressed.
Appl. Sci. 2019, 9(1), 176; https://0-doi-org.brum.beds.ac.uk/10.3390/app9010176
Submission received: 12 December 2018
/
Revised: 26 December 2018
/
Accepted: 29 December 2018
/
Published: 5 January 2019
(This article belongs to the Special Issue Advanced Intelligent Imaging Technology)
Abstract
:The work reported in this paper aims at the development of evolutionary algorithms to register images for signature recognition purposes. We propose and develop several registration methods in order to obtain accurate and fast algorithms. First, we introduce two variants of the firefly method that proved to have excellent accuracy and fair run times. In order to speed up the computation, we propose two variants of Accelerated Particle Swarm Optimization (APSO) method. The resulted algorithms are significantly faster than the firefly-based ones, but the recognition rates are a little bit lower. In order to find a trade-off between the recognition rate and the computational complexity of the algorithms, we developed a hybrid method that combines the ability of auto-adaptive Evolution Strategies (ES) search to discover a global optimum solution with the strong quick convergence ability of APSO. The accuracy and the efficiency of the resulted algorithms have been experimentally proved by conducting a long series of tests on various pairs of signature images. The comparative analysis concerning the quality of the proposed methods together with conclusions and suggestions for further developments are provided in the final part of the paper.
1. Introduction
One of the most challenging tasks of image recognition is to align images acquired at different times, by different sensors and from different angles. The registration process consists of finding correspondence between all pixels in two images of a specific scene. Registration methods are applied in various real-world problems, including object detection and recognition, motion analysis, change detection and object tracking.
Basically, image registration techniques deal with geometric distortions, the ultimate goal being to find out a set of transformation parameters that maximize the similarity degree between the images to be aligned. The class of perturbation models addressed by registration includes spatial transformations as for instance rigid, affine, projective, and global polynomial perturbation functions. The research reported in our paper involves the most commonly studied geometric degradation model, namely the affine transformation, defined as a mixture of translation, rotation, scale changes, shear and aspect ratio changes.
So far, various classes of registration techniques, mainly depending on the perturbation model, have been presented in the literature [1,2,3,4,5,6,7]. The most commonly used classes of registration methods include Principal Axes Transform (PAT), multiresolution registration, boundary registration, model-based registration, adaptive registration and optimization-based registration. PAT method belongs to PCA-based image processing techniques. Basically, the main advantages of using principal components (PCs) in digital signal analysis is that PCs are uncorrelated, with the information encoded in each one of them being the maximum for the whole set [8]. Multiresolution methods align two images using sets of increasingly smaller size representations. Since smaller images reduce geometric differences, a global transformation function successfully registers the images and speeds up the registration process. Boundary registration uses the idea of aligning images using their boundaries. The adaptive registration techniques are developed based on a collection of tools and use information about the geometric and intensity differences between the images to select the right tool for alignment. The model-based methods are applied when traditional dissimilarity measures cannot be used to find an initial registration of the images. In such cases, additional information about the images should guide the alignment process.
The techniques proposed in this paper belong to the optimization class and consist of evolutionary computation (EC) approaches. The EC approaches of image registration are usually three stage mechanisms. First, a similarity measure which can be associated to the fitness function has to be defined. In the second stage the initial parameter values that approximately register the images are automatically established by randomly generating them in a certain search space. Finally, an EC-based algorithm that takes the initial variants of registration to the optimal one is applied. The field of EC consists of genetic algorithms (GA), evolution strategies (ES), genetic programming, differential evolution, evolutionary programming and swarm intelligence. So far, the most commonly used EC methods for image registration includes GAs, memetic algorithms and particle swarm optimization [9,10,11,12,13,14].
Our research focuses on the development of image registration techniques for signature recognition. In our work we consider the degradation model that combines the rigid transformation with a shear transformation acting along the x axis. We propose and develop several EC registration methods in order to obtain accurate recognition rates and fast algorithms. First, we introduce two variants of the firefly method that proved to have excellent accuracy and fair run times. In order to speed up the computation, we propose two variants of Accelerated Particle Swarm Optimization (APSO) method. The resulted algorithms are significantly faster than the first ones, but the recognition rates are a little bit lower as compared to firefly techniques. Finally, we propose new hybrid models that combine evolution strategies and APSO methods in order to develop fast and efficient registration algorithms.
The rest of the paper is organized as follows. The proposed general EC approach of image registration developed based on the considered degradation model is supplied in Section 2. Next, a brief description of two standard EC methods, namely firefly algorithm and evolution strategies, is provided. The proposed variants of the firefly method and a new hybrid EC approach of image registration are introduced in the core section of the paper. A series of experimental results and the comparative analysis concerning the accuracy and the efficiency of the proposed algorithms are exposed in Section 6. The final part of the paper includes conclusions and suggestions for further developments regarding EC solutions for image registration.
2. The Proposed Evolutionary Computing General Framework for Image Registration
The main idea of performing image registration task using a particular EC approach is quite simple and can be described as follows. Let us denote by the reference image and we assume that the sensed image is defined by
where is the geometric transformation that depends on a particular set of parameters, SP. We assume that is invertible and the analytic expressions of and are known. The attempt to align to consists of computing the transformation parameters SP and applying the inverse ,
The computation of the transformation parameters can be carried out by an evolutionary algorithm (EA), where the search space is established based on SP, the fitness is defined in terms of a similarity/dissimilarity function computed either for the pair or for , and corresponds to the computed values of the parameters.
One of the most commonly used degradation models corresponds to the affine transformation. The main geometric transformations involved with an affine function are rigid spatial transformations, the shear effect acting along axes and changes in the aspect ratio.
The rigid transformation can be described in terms of translation, rotation and scale changes. Its main property is that the objects in images preserve their relative shape and dimensions. The 2D rigid transformation having as inputs the image and the parameters produces the output defined by
where defines the translation, stands for the scale factor and is the rotation matrix.
The shear effect acting along axes is defined by
while the changes in aspect ratio are given by the matrix
The affine transformations are obtained by applying any sequence of rigid transformations, shears and changes in the aspect ratio [15].
In our work we use the perturbation model given by a sequence of a shear transformation, acting along the x axis, and a rigid function
In this case, the set of transformation parameters is . Consequently, an EA should operate on chromosomes having their solution part represented by a five sized real-valued vector. Each candidate solution corresponds to a potential transformation parameter . In the case of self-adaptive procedures, the chromosome representation should include a parameter part, the additional alleles being related to the mutation operator.
Various similarity/dissimilarity measures have been reported so far, each one having its own strengths and shortcomings. In our developments we use one of the most studied similarity measures for solving the image registration problem, namely the Shannon mutual information (MI) method [16,17,18]. The main drawback of any MI-based EA that processes arbitrary grey level images is its computational complexity. In order to solve the complexity problem involved by the MI quality evaluation, we use the mutual information computed between the binary variants of the reference and the transformed image respectively.
Let be binary images. The mutual information between and is defined by [19]:
where is the Shannon entropy, and is the joint entropy
Since
we get
We define the fitness function of each genotype corresponding to the transformation , by
where . Note that and the maximum value of the fitness function is obtained when , which is equivalent to .
3. The Firefly Algorithm
The Firefly algorithm developed by Xin-She Yang [20] belongs to a meta-heuristic nature inspired class of algorithms, based on swarm intelligence, being typically used to solve a variety of optimization problems in real-world applications, from project scheduling problems to rich vehicle routing, and from image processing to engineering machining parameters optimization [21,22,23,24].
Let us consider the optimization problem
The firefly algorithm is based on the flashing behavior, bioluminescence or flashing signals, of fireflies and it relies on three idealized rules underlying the mathematical model. First, the intensity of bioluminescence represents an indicator of fitness for the firefly. The brightness of a firefly is influenced by and it is determined by the landscape of . The light intensity is proportional to the value of the objective function . The second rule is based on the attractiveness of the individuals, which is directly proportional to the light intensity. This means that a less bright firefly will move to the brighter one. The brightness of the firefly is directly influenced by the distance between fireflies due to the fact that the air absorbs light. Finally, the last rule states that all fireflies of the swarm are unisexual, therefore they attract one another regardless of gender.
The main features of the standard firefly algorithm are the attractiveness, the movement and the distance. The attractiveness of a firefly is proportionally influenced by light intensity, which itself is associated with the objective function and this attractiveness decreases as the distance between individuals increases. From the mathematical point of view, this idea is expressed by the following monotonically decreasing function
where is the attractiveness when the distance between two fireflies is zero , is the light absorption coefficient controlling the decrease of light intensity, and r is the distance between two fireflies.
The movement of a firefly toward a more attractive, brighter, firefly is defined by
where represents the current position of firefly , the second term represents the attraction to the light intensity while is randomly generated from .
In the following we refer to a firefly by its current position, .
Let be the number of the fireflies, the maximum generations, the initial attractiveness, the light absorption coefficient, and controlling the randomness. The standard version of the firefly algorithm is described in the Algorithm 1.
| Algorithm 1 Firefly algorithm |
| 1: Randomly generate an initial population 2: Compute , the light intensity of each ; 3: while (t < MaxGeneration) do 4: 5: 6: 7: Move firefly toward firefly using (17) 8: end if 9: end for 10: end for 11: Evaluate all candidate solutions and update the light intensity values 12: Rank the fireflies and identify the current best solution 13: 14: end while 15: Rank all fireflies and return the best one |
In most of the cases the step is static or linear with its value decreasing from iteration to iteration, each firefly from generation having the same step value. For instance, the parameter is updated after each generation by [25]
where . Usually .
Note that if the firefly is replaced by the current best individual, , we obtain a simplified version of firefly algorithm, namely the APSO method. APSO accelerates the convergence and reduces the complexity effort of the algorithm, but also can decrease its accuracy [26]. The updating rule of APSO is expressed by
One of the most important steps in developing the firefly algorithm is the parameter setting. Various algorithms can be obtained based on the previous parameters, including Differential Evolution, Simulated Annealing, Harmony Search and Particle Swarm Optimization [27]. In the standard firefly algorithm one of the factors that influence the diversity of the population is the randomization , where is the randomization parameter. In general the step is static or linear with its value decreasing from iteration to iteration, each firefly from generation having the same step value. If has a small value, the current solution may be trapped in the local optimum, resulting in a premature convergence. Large values of randomness parameter may lead to divergent algorithms. The parameter directly affects the exploration and exploitation of the algorithm. The value of should rapidly decrease through the first generations to explore new search space, while it should slightly vary from one iteration to another in the last part of the algorithm.
4. Evolution Strategies
The evolution strategies (ESs) represent one of the major paradigms of the evolutionary algorithm, used in a wide variety of optimization tasks and typically continuous but also discrete, combinatorial search spaces with and without constraints [28]. One of the main features of ESs is self-adaptability, a mechanism that adjusts the parameters of the exploration distribution during the search process [29]. In most of the cases, the self-adaptation is strictly related to the mutation mechanism.
In ESs the mutation process represents the main variation operator and usually implements the following strategies: uncorrelated mutation with one step, uncorrelated mutation with n steps and correlated mutations respectively.
The first mutation procedure uses a single standard deviation parameter, or step size, to compute each allele of the resulted chromosome. The uncorrelated mutation with n steps deals with possible different step sizes to affect different alleles in a chromosome in order to treat dimensions differently. This way, the mutation procedure introduces different standard deviations for each axis, the resulted offspring being placed on an ellipse around the individual to be mutated, orthogonal to the axes. In case of the correlated mutation, the resulted offspring belong to an ellipse having any orientation by rotating it with a rotation matrix given by a covariance parameter. Mutation mainly depends on the mutation strength parameter [30]. At the beginning of the optimization process, the value of this parameter should be large to ensure the exploring of the search space and later, in the vicinity of the optimum point, the value of the parameter should decrease to ensure the exploitation phase.
In the ES the phenotype space is typically . In this case, the genotype and the phenotype coincide and the representation of the chromosome is straightforward, with no codification being needed. If the search procedure implements self-adaptation, each candidate solution is defined in terms of solution part and parameter part [29]. For instance, in the case of the standard uncorrelated multistep mutation, the chromosome representation is as follows
where, for each , is the step size of mutation.
The algorithm uses a population of µ potential solutions named chromosomes, which are randomly generated in the first generation. Usually, the size of population is fixed. In the evolution strategies, the parent selection is not influenced by the fitness function, meaning that the entire population could generate offspring solutions. The size of offspring population should be larger than the parent set, the recommended size being .
The crossover procedure creates new individuals, mixing the genetic material of parents. The recombination procedures are either local or global and use discrete and respectively intermediate crossover mechanisms. In case of the local recombination, a new offspring is generated using two parents randomly selected from population. In contrast to this, in case of the global recombination, each allele of the new offspring is obtained using a pair of parents. The resulted child has multiple parents.
In our hybrid approach described in Section 5.2, the standard uncorrelated multistep mutation procedure is used to add some randomness to the solution. The mutated version of a chromosome is the genotype computed as follows:
where represents the mutation step, represent a random number generated from normal distribution, and stand for the learning steps
Note that, in order to keep the step sizes above a certain threshold, one can apply the rule
In the ES algorithm, the survivor selection mechanism is deterministic. In case of ( selection, the next generation of chromosomes are selected from offspring population only. In case of ( the best chromosomes are chosen from both the parent population and the children multiset [28].
The general ES scheme is described in the Algorithm 2.
| Algorithm 2 ES algorithm |
| 1: 2: Initialization—Randomly generate initial population— 3: Evaluate 4: while Termination Condition does not hold do 5: Use recombination and mutation operator to obtain new offspring solutions 6: Evaluate 7: Rank and select the µ best chromosomes using ( or ( to obtain 8: 9: end while |
5. The Proposed Evolutionary Algorithms for Image Registration
In order to solve the image registration problem, we propose two variants of the firefly algorithm together with their corresponding APSO versions. Also, a hybridization of APSO algorithm with an ES-based technique is supplied next.
5.1. The Proposed Variants of Firefly Algorithm and APSO
In the following we describe two proposed updating rule variants to develop new algorithms based on the general scheme of the standard firefly algorithm and APSO mechanism respectively.
Each candidate solution (firefly) is a D-dimensional real valued vector whose entries are the values of a potential transformation parameter. Note that if the search space corresponds to the degradation model (8) then . We considered the fixed-size model, with each current population having chromosomes, ,
Also, we assume that for each candidate solution
In other words, each transformation parameter belonging to SP is assumed to be bounded by certain given values, the search space being defined by
The initial firefly population, , is randomly generated according to
where is a random number generated from uniform distribution .
We introduce two modalities to define the randomness parameter and we compute the dissimilarity between each component of two different individuals instead of the classic Euclidian distance to deal with the attributes diversity.
First, we take into account the search space bounds to define the updating rule
where is a given constant scale factor, is randomly generated from the uniform distribution . Note that the factor depends on the value of k. The vector r measures the differences between and , its kth component being given by
where
The updating rule (31) modifies each component k of the individual based on its corresponding range.
The second proposed updating rule takes into account both the variable ranges and the quality of the attractor
where represents the quality of the attractor, is the constant scale factor and is randomly generated from uniform distribution. In the proposed attractiveness formula, the quality of the attractor affects the randomness parameter defined by (37). In case of high luminous intensity individuals less randomness value is added. If the firefly is weak then the perturbation grows.
As the search progresses, unfeasible individuals can be obtained. In order to deal with unfeasibility, we use the following border reflection mechanism. If the updated value of exceeds the upper bound then it is set according to
where
and stands for the uniform distribution . If the computed value of is below then we apply the following updating rule
where , val is defined by (39), and stands for the uniform distribution .
In case is replaced by the best individual of the current firefly population, g, we get the modified updating rules of APSO algorithm
where
5.2. Hybridization between ES Search and APSO
The main aim of the hybrid approach introduced next is to find a trade-off between the accuracy and the efficiency of the obtained algorithms. The resulted techniques combine the ability of auto-adaptive ES search to correctly identify the direction of fitness increase to find out a global optimum solution with the strong quick convergence ability of APSO.
The proposed hybrid technique is a two-stage mechanism that first uses an ES search mechanism to detect the direction of fitness increase and a certain population, Pop, then applies one of the proposed variants of APSO using a subset of good individuals to quickly reach an optimal solution. The idea behind this hybridization relies on the following remarks. Despite the fact that ES mechanisms are in general very suitable to rapidly identify promising areas of the space search, they are less good for finely tuning the solutions. A more efficient method might be to incorporate a more systematic search of the vicinity of good solutions by adding a search mechanism with a quick convergence ability.
The ES component of the hybrid technique is characterized by: , the initial values of parameter; , the minimum value of each step size; , the maximum number of generations; and the threshold parameter controlling the desired sub-optimal fitness value, . The parameters of APSO are: , the maximum number of firefly populations, the parameters of the updating rule, and the APSO population size.
The computation scheme of the proposed method is described as follows
| Algorithm 3 Hybrid ES-APSO algorithm |
| 1: Inputs: , 2: 3: Randomly generate 4: Evaluate each and compute the best fitted individual, 5: while and do 6: Compute using a recombination procedure 7: Compute , the mutated variants of individuals belonging to 8: Evaluate each 9: Select the next generation using either procedure or mechanism and determine the chromosome ; 10: 11: end while 12: Select the best n individuals from the last computed to compute 13: Initialize for each ; 14: while (t < MaxGeneration) do 15: Compute g, the best fitted firefly from the current population 16: 17: Move firefly toward firefly using (41) or (42) 18: end for 19: Evaluate all candidate solutions and update the light intensity values 20: 21: end while 22: Rank all fireflies and return the best one |
6. Experimental Results
In order to derive conclusions regarding the accuracy and the computational complexity of the proposed methods, we have conducted a long series of experiments on various images representing signatures.
The quality of each algorithm from the accuracy of resulted alignment point of view has been measured in terms of success rate, computed as follows. For each input pair of images, we denote by the number of tests and let be the number of successful tests. We call an algorithm test a success if the fitness of the resulted best individual exceeds 0.85. Note that, for each image, each technique has been tested 500 times to obtain meaningful results. The success rate of a certain algorithm, SR, is given by
Moreover, one of the most commonly used quantitative similarity measures, SNR, has been computed to derive conclusions on the registration quality. The SNR value computed for a certain sensed image versus a reference image of the same size is defined by
The computational complexity/efficiency of each algorithm is evaluated in terms of execution time. Our tests have been conducted on a computer with the following configuration: Processor—Intel Core I7-7700 3.60 GHZ, Memory—8GB DDR4 2400 MHZ, Storage—1 TB HDD 7200 RPM, SATA3.
In the following we present the experimentally established results in case of using each class of metaheuristics. The success rate and the mean values of mutual information ratio (MIR), SNR and run time respectively are reported below.
The mean value corresponding to each above-mentioned performance measure has been computed by averaging the values of the corresponding measure resulted for each run. Note that each algorithm has been run 500 times for each input pair of images . The reported results correspond to a set of 19 pair of images representing signatures, , perturbed by the same degradation model (8).
The techniques belonging to the first class, APSO1 and APSO2, implement APSO algorithms using the updating rules (41) and (42) respectively. In our tests the parameters were set as follows: and the population size is 50.
The results of applying APSO1 and APSO2 techniques to register the images belonging to are displayed in Table 1, Table 2, Table 3 and Table 4. The tests pointed out that APSO2 persistently obtains better results from the accuracy point of view, but the computational effort is slightly increased as compared to APSO1.
Note that there are situations in which the accuracy of APSO2 is significantly better than the accuracy of APSO1. Nevertheless, the accuracy of APSO-based recognition procedure is still low for some input pairs of images.
The second class of algorithms includes Firefly1 and Firefly2, variants of Firefly algorithms considering the updating rules (31) and (36) respectively. In our tests the parameters were set as follows: and the population size is 30. Obviously, the firefly approaches involve a significantly larger computational effort as compared to APSO algorithms.
From the accuracy point of view, SR = 100% for all pair of images in , while MIR values are around 0.87 and the SNR index frequently exceeds 24. The results are displayed in Table 1, Table 2, Table 3 and Table 4.
Note that the computational effort is significantly reduced in case Firefly technique is implemented based on the updating rule (36).
The hybrid techniques belonging to the third class of proposed methods, ES-APSO1 and ES-APSO2, implement the algorithm described in Section 5.2 based on the updating rules (41) and (42) respectively. We conducted the tests using the following parameters setting:
- ES and ;
- APSO—, and the population size is 22.
The results of applying ES-APSO1 and ES-APSO2 techniques to register the images belonging to are displayed in Table 1, Table 2, Table 3 and Table 4.
Taking into account both accuracy and efficiency points of view, the proposed hybrid methods prove excellent results.
Note that the APSO and Firefly parameters and are usually set in [25,31]. In order to tune the parameters values to the considered registration problem, we have implemented a standard self-adaptive method. The initial values of and are set to 2. As the APSO/Firefly self-adaptive procedure evolves, the values of and vary between 1.8 and 2.1. We conclude that we can set and to 2, the result being consistent to the parameters used in reference [32] for the PSO algorithm. The parameter α was set either using (31) or (36).
In case of the Firefly algorithm, the recommended population size is usually between 15 and 100 [25]. Since the APSO algorithm is a reduced variant of the Firefly algorithm, we used individuals for APSO and for Firefly. In case of the hybrid approaches, the initial population generation is replaced by an ES method that computes sized populations with best individual having the fitness value above a certain threshold. The APSO algorithms are implemented next taking into account only the best individuals.
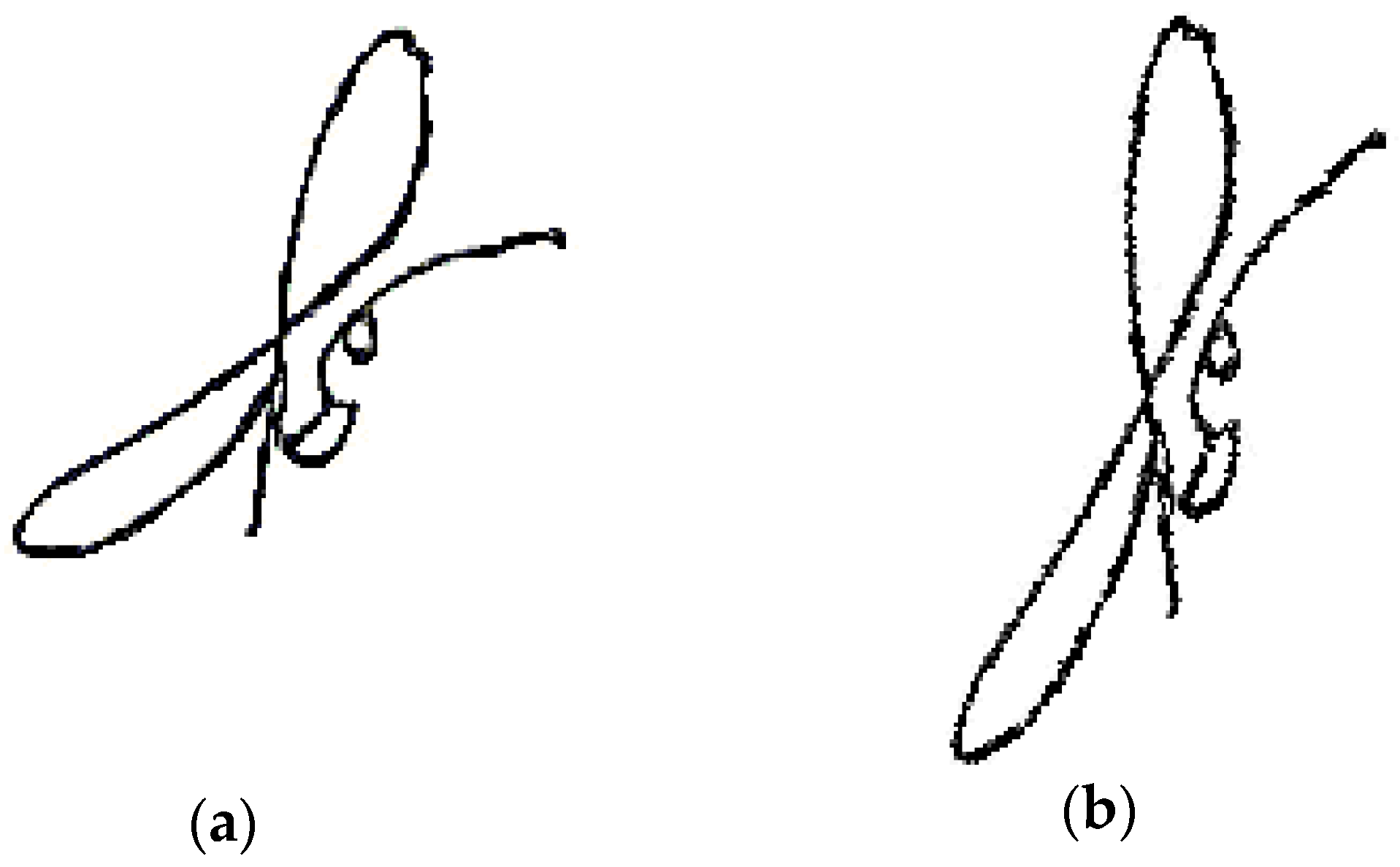
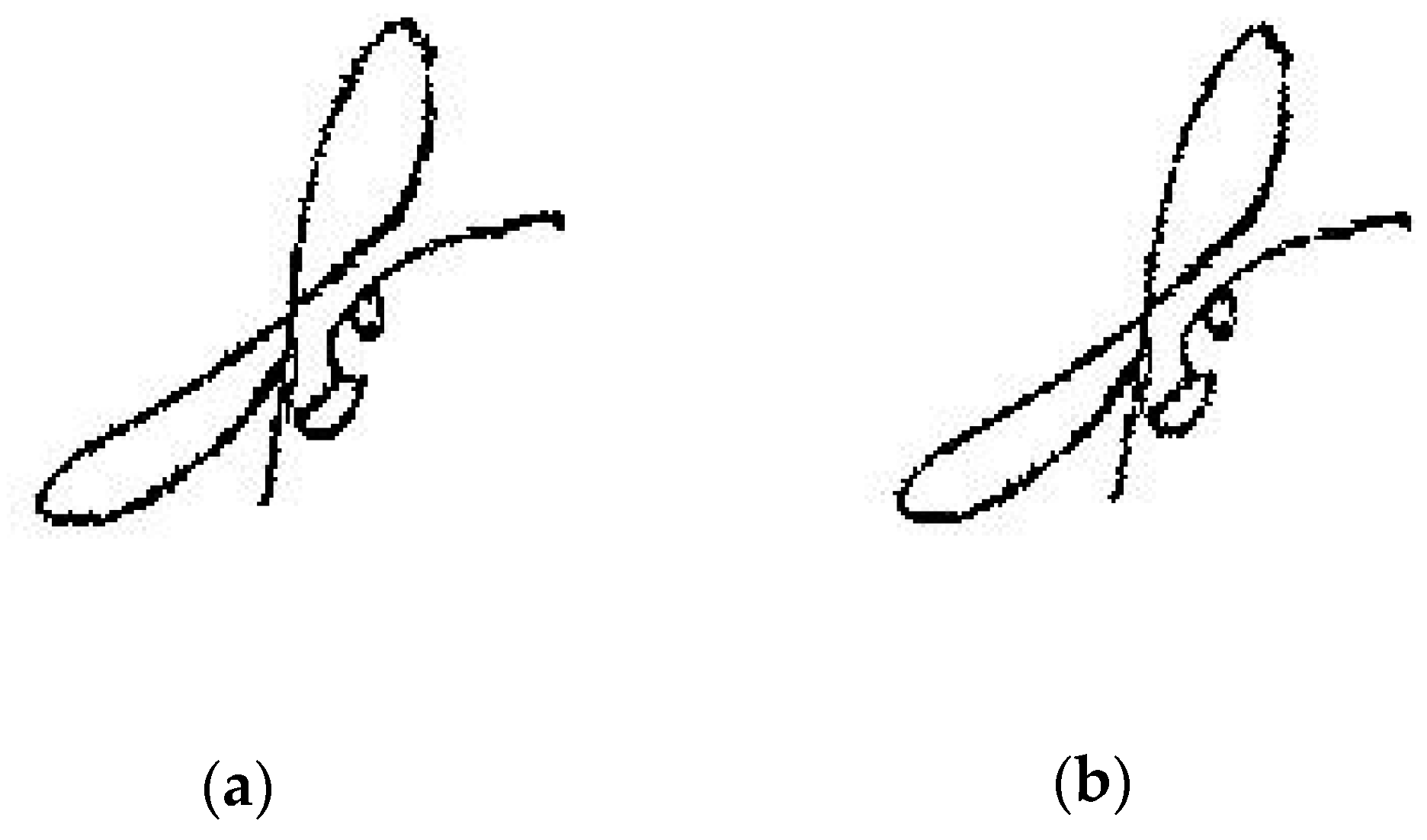
Also, a series of tests to evaluate the quality of the proposed classes of algorithms against the quality of the well-known One Plus One Evolutionary Optimizer (EO) have been performed [33]. From both accuracy and computation effort points of view, the results obtained by the proposed hybrid methods are significantly better as compared to the aforementioned optimizer in most of the cases. For instance, in case of the pair of images depicted in Figure 1a,b the register image using ES-APSO2 is presented in Figure 2a (MIR 0.8716, SNR 24.4441) while the best result obtained by One Plus One Evolutionary Optimizer is shown in Figure 2b (MIR 0.6772, SNR 19.8342).
7. Conclusive Remarks and Suggestions for Further Work
The work reported in the paper addresses the problem of binary image registration for signature recognition purposes. We proposed a series of EC techniques in order to align a sensed image to a target one using the mutual information measure to compute the similarities between two images. We evaluated the quality of the results from both accuracy and computational complexity points of view. The accuracy was established in terms of the percentage of successful runs, the quality of the solutions being also calculated in terms of the signal-to-noise ratio. The computational complexity was defined based on execution time (run time).
The first class of methods consists of APSO approaches, where the updating rules are defined based on the attributes range and the quality of current candidate solution. Based on the obtained results, we conclude that the algorithms are very fast and, in most of the cases, the accuracy is fairly good.
The class of firefly-based techniques comprises very accurate algorithms, the success percentage being 100% for every tested pair of images. The main drawback of the proposed Firefly1 and Firefly2 methods is their execution time. However, the efficiency of firefly-based approach can be significantly improved by defining updating rules that consider, besides other criteria, the attractors quality.
Finally, to find a trade-off between the accuracy and the efficiency of the algorithms, we developed a hybrid method that combines the ability of auto-adaptive ES search to discover a global optimum solution with the strong quick convergence ability of APSO. The obtained algorithms proved very fast and are also highly accurate. Also, a series of experiments led to the conclusion that the proposed hybrid technique outperforms the well-known One Plus One Evolutionary Optimizer (EO) from the accuracy point of view.
We conclude that the results are encouraging and entail future work toward extending the proposed approach to more complex perturbation models as well as more complex hybrid and memetic techniques.
Author Contributions
C.-L.C.: methodology, software, validation, analysis, writing—original draft preparation, writing—review and editing, supervision; A.S.: software, validation, analysis, writing—review and editing.
Funding
This research received no funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Goshtasby, A.A. Image Registration: Principles, Tools and Methods; Springer Science & Business Media: London, UK, 2012. [Google Scholar]
- Modersitzki, J. Numerical Methods for Image Registration; Oxford University Press: New York, NY, USA, 2004. [Google Scholar]
- Sheng, Q.; Wang, Q.; Zhang, X.; Wang, B.; Zhang, B.; Zhang, Z. Registration of Urban Aerial Image and LiDAR Based on Line Vectors. Appl. Sci. 2017, 7, 965. [Google Scholar] [CrossRef]
- Pluim, J.P.W.; Maintz, J.B.A.; Viergever, M.A. Mutual information matching in multiresolution contexts. Image Vis. Comput. 2001, 19, 45–52. [Google Scholar] [CrossRef]
- Zhou, D.; Sun, J.; Lai, C.; Xu, W.; Lee, X. An improved quantum-behaved particle swarm optimization and its application to medical image registration. Int. J. Comput. Math. 2011, 88, 1208–1223. [Google Scholar] [CrossRef]
- Santamaría, J.; Damas, S.; García-Torres, J.; Cordón, O. Self-adaptive evolutionary image registration using differential evolution and artificial immune systems. Pattern Recogn. Lett. 2012, 33, 2065–2070. [Google Scholar] [CrossRef]
- Torabi, A.; Massé, G.; Bilodeau, G. An iterative integrated framework for thermal–visible image registration, sensor fusion, and people tracking for video surveillance applications. Comput. Vis. Image Understand. 2012, 116, 210–221. [Google Scholar] [CrossRef]
- State, L.; Cocianu, C.; Vlamos, P.; Constantin, D. Neural Approaches to Image Compression/Decompression Using PCA based Learning Algorithms. In Proceedings of the 8th International Workshop on Pattern Recognition in Information Systems, PRIS, Barcelona, Spain, 12–13 June 2008; pp. 187–192. [Google Scholar]
- Abdul Khalid, N.; Md Ariff, N.; Yahya, S.; Mohamed Noor, N. A Review of Bio-inspired Algorithms as Image Processing Techniques. In Proceedings of the Conference Software Engineering and Computer Systems, ICSECS 2011, Kuantan, Pahang, Malaysia, 27–29 June 2011; pp. 660–673. [Google Scholar]
- Valsecchi, A.; Damas, S.; Santamaria, J. An image registration approach using genetic algorithms. In Proceedings of the Conference 2012 IEEE Congress on Evolutionary Computation, Brisbane, QLD, Australia, 10–15 June 2012; pp. 416–423. [Google Scholar]
- Damas, S.; Cordón, O.; Santamaría, J. Medical Image Registration Using Evolutionary Computation: An Experimental Survey. IEEE Comput. Intell. Mag. 2011, 6, 26–42. [Google Scholar] [CrossRef]
- Cocianu, C.; Stan, A. Towards an Evolution Strategy Approach in Binary Image Registration for Solving Digital Signature Recognition Tasks. In Proceedings of the 20th International Conference on Enterprise Information Systems, Funchal, Portugal, 21–24 March 2018; pp. 469–476. [Google Scholar]
- Cocianu, C.; Stan, A. New Attempts in Binary Image Registration. In Proceedings of the 2018 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; pp. 253–258. [Google Scholar]
- Valsecchi, A.; Dubois-Lacoste, J.; Stutzle, T.; Damas, S.; Santamaria, J.; Marrakchi-Kacem, L. Evolutionary medical image registration using automatic parameter tuning. In Proceedings of the 2013 IEEE Congress on Evolutionary Computation, Cancun, Mexico, 20–23 June 2013; pp. 1326–1333. [Google Scholar]
- Brown, L. A Survey of Image Registration Techniques. ACM Comput. Surv. 1992, 24, 325–376. [Google Scholar] [CrossRef]
- Li, Q.; Sato, I. Multimodality Image Registration by Particle Swarm Optimization of Mutual Information. In Proceedings of the Third International Conference on Intelligent Computing, ICIC 2007: Advanced Intelligent Computing Theories and Applications. With Aspects of Artificial Intelligence, Qingdao, China, 21–24 August 2007; pp. 1120–1130. [Google Scholar]
- Zhuang, Y.; Gao, K.; Miu, X.; Han, L.; Gong, X. Infrared and visual image registration based on mutual information with a combined particle swarm optimization—Powell search algorithm. Optik Int. J. Light Electron Opt. 2016, 127, 188–191. [Google Scholar] [CrossRef]
- Pluim, J.; Maintz, J.; Viergever, M. Mutual-information based registration of medical images: A survey. IEEE Trans. Med. Imaging 2003, 22, 986–1004. [Google Scholar] [CrossRef] [PubMed]
- Cover, T.; Thomas, J. Elements of Information Theory; Wiley-Interscience John Wiley & Sons: Chichester, UK, 2006. [Google Scholar]
- Yang, X. Nature-Inspired Metaheuristic Algorithms; Luniver: Frome, UK, 2010. [Google Scholar]
- Osaba, E.; Yang, X.; Diaz, F.; Onieva, E.; Masegosa, A.; Perallos, A. A discrete firefly algorithm to solve a rich vehicle routing problem modelling a newspaper distribution system with recycling policy. Soft Comput. 2016, 21, 5295–5308. [Google Scholar] [CrossRef] [Green Version]
- Crawford, B.; Soto, R.; Johnson, F.; Valencia, C.; Paredes, F. Firefly Algorithm to Solve a Project Scheduling Problem. Adv. Intell. Syst. Comput. 2016, 1, 449–458. [Google Scholar]
- Sharma, A.; Sehgal, S. Image segmentation using firefly algorithm. In Proceedings of the 2016 International Conference on Information Technology (InCITe)—The Next Generation IT Summit on the Theme—Internet of Things: Connect your Worlds, Noida, India, 6–7 October 2016. [Google Scholar]
- Bharathi Raja, S.; Srinivas Pramod, C.; Vamshee Krishna, K.; Ragunathan, A.; Vinesh, S. Optimization of electrical discharge machining parameters on hardened die steel using Firefly Algorithm. Eng. Comput. 2013, 31, 1–9. [Google Scholar] [CrossRef]
- Yang, X. Cuckoo Search and Firefly Algorithm; Springer: London, UK, 2014. [Google Scholar]
- Yang, X.; Deb, S.; Fong, S. Accelerated Particle Swarm Optimization and Support Vector Machine for Business Optimization and Applications. In Proceedings of the International Conference on Networked Digital Technologies, Macau, China, 11–13 July 2011; pp. 53–66. [Google Scholar]
- Yang, X. Nature-Inspired Algorithms and Applied Optimization; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Eiben, A.; Smith, J. Introduction to Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Edelkamp, S.; Schrödl, S. Heuristic Search; Morgan Kaufmann: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Kramer, O. Self-Adaptive Heuristics for Evolutionary Computation; Springer: Berlin, Germany, 2008. [Google Scholar]
- Chintam, J.; Daniel, M. Real-Power Rescheduling of Generators for Congestion Management Using a Novel Satin Bowerbird Optimization Algorithm. Energies 2018, 11, 183. [Google Scholar] [CrossRef]
- Yang, X. Firefly Algorithms for Multimodal Optimization. Stoch. Algorithms Found. Appl. 2009, 5792, 169–178. [Google Scholar] [Green Version]
- Styner, M.; Brechbuehler, C.; Székely, G.; Gerig, G. Parametric estimate of intensity inhomogeneities applied to MRI. IEEE Trans. Med. Imaging 2000, 19, 153–165. [Google Scholar] [CrossRef] [PubMed] [Green Version]
Figure 1.
(a) The target image; (b) The observed image.

Figure 2.
(a) The image obtained by ES-APSO2; (b) The image obtained by EO.


{kind=link}
{kind=link}
Table 1.
The SR values of the proposed algorithms.
| Input | APSO1 | APSO2 | Firefly1 | Firefly2 | ES-APSO1 | ES-APSO2 |
|---|---|---|---|---|---|---|
| 98% | 100% | 100% | 100% | 99% | 100% | |
| 97% | 98% | 100% | 100% | 99.50% | 99.50% | |
| 98.75% | 99.25% | 100% | 100% | 97.50% | 99% | |
| 98.50% | 99.25% | 100% | 100% | 100% | 100% | |
| 99.25% | 100% | 100% | 100% | 99.50% | 100% | |
| 77.25% | 85.75% | 100% | 100% | 100% | 100% | |
| 93.50% | 95% | 100% | 100% | 99% | 100% | |
| 87.75% | 96.50% | 100% | 100% | 99% | 99.50% | |
| 99.50% | 99.50% | 100% | 100% | 99.50% | 100% | |
| 90.50% | 97.25% | 100% | 100% | 100% | 99.50% | |
| 95.50% | 95.50% | 100% | 100% | 99.50% | 99.50% | |
| 88% | 91.75% | 100% | 100% | 99% | 100% | |
| 99.50% | 99% | 100% | 100% | 100% | 99.50% | |
| 71% | 73.75% | 100% | 100% | 99% | 99% | |
| 81.75% | 86% | 100% | 100% | 98.50% | 98.50% | |
| 73.25% | 82.75% | 100% | 100% | 99.50% | 99% | |
| 95.75% | 96.75% | 100% | 100% | 99% | 98.50% | |
| 81.50% | 87.25% | 100% | 100% | 93.75% | 97.25% | |
| 90.25% | 98.25% | 100% | 100% | 98.50% | 98.50% |
Table 2.
The mean values of MIR measures.
| Input | APSO1 | APSO2 | Firefly1 | Firefly2 | ES-APSO1 | ES-APSO2 |
|---|---|---|---|---|---|---|
| 0.851 | 0.869 | 0.871 | 0.874 | 0.869 | 0.873 | |
| 0.852 | 0.857 | 0.874 | 0.873 | 0.871 | 0.871 | |
| 0.861 | 8.863 | 0.87 | 0.87 | 0.861 | 0.869 | |
| 0.86 | 0.87 | 0.874 | 0.871 | 0.87 | 0.873 | |
| 0.866 | 0.872 | 0.874 | 0.875 | 0.87 | 0.87 | |
| 0.712 | 0.772 | 0.872 | 0.875 | 0.871 | 0.872 | |
| 0.822 | 0.833 | 0.873 | 0.871 | 0.868 | 0.869 | |
| 0.789 | 0.847 | 0.868 | 0.874 | 0.869 | 0.868 | |
| 0.868 | 0.865 | 0.871 | 0.869 | 0.871 | 0.872 | |
| 0.798 | 0.85 | 0.871 | 0.872 | 0.871 | 0.867 | |
| 0.838 | 0.839 | 0.873 | 0.873 | 0.871 | 0.868 | |
| 0.779 | 0.808 | 0.871 | 0.872 | 0.868 | 0.872 | |
| 0.866 | 0.862 | 0.869 | 0.87 | 0.869 | 0.866 | |
| 0.643 | 0.67 | 0.87 | 0.869 | 0.866 | 0.862 | |
| 0.736 | 0.778 | 0.869 | 0.871 | 0.861 | 0.864 | |
| 0.656 | 0.733 | 0.873 | 0.87 | 0.867 | 0.866 | |
| 0.84 | 0.848 | 0.868 | 0.868 | 0.866 | 0.86 | |
| 0.73 | 0.781 | 0.861 | 0.863 | 0.829 | 0.848 | |
| 0.796 | 0.861 | 0.867 | 0.866 | 0.861 | 0.856 |
Table 3.
The mean values of SNR.
| Input | APSO1 | APSO2 | Firefly1 | Firefly2 | ES-APSO1 | ES-APSO2 |
|---|---|---|---|---|---|---|
| 23.81 | 24.01 | 23.99 | 24.1 | 23.87 | 24.02 | |
| 25.99 | 26.03 | 26.3 | 26.3 | 26.2 | 26.19 | |
| 24.48 | 24.48 | 24.65 | 24.65 | 24.42 | 24.6 | |
| 22.99 | 23.23 | 24.69 | 24.55 | 24.52 | 24.67 | |
| 24.16 | 24.28 | 24.33 | 24.43 | 24.2 | 24.21 | |
| 22.9 | 23.86 | 25.55 | 25.68 | 25.51 | 25.56 | |
| 24.09 | 24.21 | 24.9 | 24.8 | 24.7 | 24.72 | |
| 24 | 24.93 | 25.23 | 25.48 | 25.28 | 25.3 | |
| 24.19 | 24.03 | 24.15 | 24.11 | 24.24 | 24.21 | |
| 23.37 | 24.2 | 24.56 | 24.58 | 24.54 | 24.44 | |
| 25.13 | 25.18 | 25.75 | 25.75 | 25.72 | 25.54 | |
| 19.67 | 20.09 | 21.12 | 21.17 | 21.07 | 21.18 | |
| 25.16 | 25.09 | 25.3 | 25.39 | 25.24 | 25.12 | |
| 22.07 | 22.48 | 25.82 | 25.76 | 25.71 | 25.59 | |
| 22.58 | 23.3 | 24.82 | 24.94 | 24.63 | 24.74 | |
| 23.18 | 24.4 | 26.69 | 26.53 | 26.47 | 26.44 | |
| 25.62 | 25.75 | 26.04 | 26.03 | 26.06 | 25.9 | |
| 24.55 | 25.38 | 26.72 | 26.8 | 26.16 | 26.53 | |
| 25.66 | 26.69 | 26.74 | 26.72 | 26.65 | 26.48 |
Table 4.
The mean run times (s).
| Input | APSO1 | APSO2 | Firefly1 | Firefly2 | ES-APSO1 | ES-APSO2 |
|---|---|---|---|---|---|---|
| 9.45 | 11.46 | 32 | 24.42 | 6.92 | 7.67 | |
| 8.73 | 10.04 | 29.89 | 21.7 | 6.81 | 7.73 | |
| 13.37 | 15.43 | 45.12 | 32.61 | 9.35 | 10.33 | |
| 10.92 | 12.98 | 37.99 | 26.33 | 8.2 | 9.1 | |
| 12.07 | 14.21 | 41.97 | 29.38 | 8.95 | 9.99 | |
| 10.44 | 10.87 | 29.55 | 21.36 | 6.9 | 7.66 | |
| 10.71 | 11.61 | 36.88 | 26.45 | 8.43 | 9.46 | |
| 10.34 | 11.47 | 31.49 | 23.17 | 7.33 | 8.45 | |
| 10.73 | 6.09 | 37.62 | 26.13 | 8.72 | 9.77 | |
| 12.34 | 13.63 | 39.53 | 29.86 | 8.99 | 10.32 | |
| 9.5 | 5.75 | 32.6 | 24.13 | 7.12 | 8 | |
| 15.74 | 16.77 | 61.61 | 45.48 | 12.96 | 16.05 | |
| 10.61 | 6.02 | 35.67 | 26.18 | 8.15 | 9.18 | |
| 18.41 | 18.61 | 43.65 | 32.9 | 10.86 | 11.84 | |
| 19.68 | 19.76 | 46.96 | 35.85 | 12.94 | 14.03 | |
| 18.28 | 19.58 | 40.98 | 30.79 | 10.52 | 11.31 | |
| 11.86 | 13.74 | 40.99 | 30.02 | 9.25 | 10.11 | |
| 14.24 | 15.4 | 44.77 | 33.93 | 13 | 12.86 | |
| 11.71 | 12.81 | 37.57 | 28.81 | 9.79 | 10.64 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Cocianu, C.-L.; Stan, A. New Evolutionary-Based Techniques for Image Registration. Appl. Sci. 2019, 9, 176. https://0-doi-org.brum.beds.ac.uk/10.3390/app9010176
AMA Style
Cocianu C-L, Stan A. New Evolutionary-Based Techniques for Image Registration. Applied Sciences. 2019; 9(1):176. https://0-doi-org.brum.beds.ac.uk/10.3390/app9010176
Chicago/Turabian StyleCocianu, Catalina-Lucia, and Alexandru Stan. 2019. "New Evolutionary-Based Techniques for Image Registration" Applied Sciences 9, no. 1: 176. https://0-doi-org.brum.beds.ac.uk/10.3390/app9010176
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.