1. Introduction
The recent development of low-cost, easy to use, small unmanned aerial vehicles (UAVs) and miniaturized thermodynamic sensors, has enormous potential to help close the gap in meteorological observations in the atmospheric boundary layer (ABL) [
1,
2,
3]. This gap exists because surface-based towers are not high enough, balloons are only launched twice daily, most surface-based remote sensing instruments provide a vertical profile only, and radar does not provide thermodynamic information. An advantage of small UAVs is their ability to fly in airspaces or situations that are too difficult or dangerous for manned aircraft, such as, for example, in and around thunderstorms [
4] or at low heights above ground level [
5]. UAVs are perfectly suited for taking observations in sensitive ecosystems [
6]. An advantage of rotary wing UAVs over their fixed-wing cousins is their capability to (1) hover; (2) ascend vertically at a fixed horizontal location [
2,
4]; and (3) land on a small spatial footprint [
2]. Other scenarios where UAVs can play a role in meteorological sensing are (1) to determine atmospheric stability and wind characteristics in the event of dangerous gas release [
6,
7]; (2) monitoring freezing conditions around temperature-sensitive crops like citrus; (3) investigating micro-climates in farm fields for precision agriculture; (4) observing the structure of meteorological phenomena like sea breezes and cold fronts; (5) characterizing atmospheric turbulence [
8,
9]; (6) studying convection initiation [
9,
10]; (7) investigating atmospheric boundary layer transitions, inversions, and vertical profiles [
9,
11,
12]; (8) numerical weather model validation and initialization [
11]; and (9) measuring surface-sensible heat fluxes [
13,
14]. Numerous UAV-based atmospheric applications exist and over the past four years, several researchers have investigated the validation of sensors in laboratory and field settings as well as optimal sensor placement on the UAV platform as a function of external (to the sensor) heating sources and aspiration. This study will focus on small, rotary-wing UAVs (rw-UAVS) used to measure air temperature. Hence, only the results from prior studies emphasizing rw-UAVs and temperature sensors are summarized here.
With the development of UAV technology comes the need to improve the knowledge of the best practices for accurate UAV-based measurement [
4]. The
calibration of meteorological sensors is typically performed under controlled laboratory conditions [
10]. However, calibration or reliance on manufacturer specifications is not sufficient for determining the accuracy and reliability of meteorological measurements made by UAVs, because they do not account for the impacts of turbulence, solar heating, sensor placement on the platform, and the extent to which the measurements represent actual conditions [
10]. Uncertainties can arise from how atmospheric sensors are mounted on the UAV platform [
4]. For example, rotary-wing UAVs can introduce the localized mixing of the atmosphere by the propellers, which alters the environment being sampled. Another concern is that the lower speeds of rotary-wing UAVs reduces the airflow and aspiration of the sensors, contributing to heating from the direction of the sun [
4]. Therefore, the
validation of UAV-based sensors is another critical step towards acquiring accurate UAV-based measurements [
10]. Validation is performed by comparing measurements from UAV-based sensors to collocated measurements from independent observing systems of generally accepted high quality.
Comparisons between temperature measurements from rw-UAVs and instrumented towers have been performed in several studies [
1,
4,
8,
14]. Experiment details are summarized in
Table 1, mean and standard deviations are given in
Table 2. In several cases, the iMET-XQ (InterMET Inc., Grand Rapids, MI, USA) sensor was used. Details about this sensor are presented in
Section 2. In refs. [
8,
14] the rw-UAV hovered close to the instrumented tower and cold biases were found (
Table 2). In ref. [
1], the UAVs flew vertical profiles at 300 m from the instrumented tower and the temperature averages of the lowest 5 m of the ascending legs of the vertical profiles were compared to a tower sensor at 2 m above ground level (AGL). In this case, a warm bias was the result. The comparisons described in ref. [
4] are unique in that multiple UAVs were used with multiple sensor types and configurations. Some sensors were placed in radiation shields, some were aspirated (usually by rotor wash), some sensors were both shielded and aspirated, and some were neither. Overall, a warm bias was found for the UAV-based sensors (
Table 2); shielded but unaspirated sensors showed the warmest bias, sensors that were neither shielded nor aspirated showed a slightly smaller warm bias, and sensors that were both shielded and aspirated reported the smallest warm bias. Sensors that were unshielded but aspirated showed a small cool bias. The warm biases were attributed to the absorption of direct solar radiation from the sun as well as infrared radiation from the surface, the atmosphere, or warm UAV components (e.g., motors or batteries).
Comparison with rawinsonde measurements were reported in refs. [
1,
10], and the results are shown in
Table 2. The biases were warm in three out of four experiments. In ref. [
10], the rw-UAV temperature measurements were compared against both a rawinsonde system and an atmospheric emitted radiance interferometer (AERI). The warm biases found in both experiments were attributed to the flow of warm air from the multiple rotary motors of the UAVs.
In ref. [
1], two types of experiments were performed to assess the precision (or uncertainty bounds) of the iMET-XQ sensors: (1) by comparing the measurements from two iMET-XQ sensors on the same UAV and (2) by comparing the measurements from two iMET-XQ sensors on two different UAVs flown approximately 50 m apart. The former resulted in temperature differences between the two iMET-XQ sensors that were almost all within ±0.2 °C. In the second experiment, mean differences in temperature between the two UAVs ranged between 0.12 and 0.39 °C.
When measuring temperature, sensors need to be shielded from solar radiation which can bias temperature measurements according to [
15] by 1 °C or more in weak ambient winds. On towers, the radiation shields are either aspirated by a mechanical fan or by the ambient wind. Radiosondes are ventilated by the relative airflow during the flight [
16,
17]. On rw-UAVs, sensors can be aspirated by rotor downwash or fans [
2,
3]. Past studies indicate that shielding on rw-UAVs may not be critical [
4] due to sufficient aspiration from rotor wash just like radiosondes being aspirated by airflow. However, no clear consensus exists and experiments are ongoing as summarized below.
The effects of rotor wash from a customized rw-UAV and shielding on temperature observations were tested in an indoor chamber in ref. [
2]. Underneath the propellers, temperatures were close to the reference temperature due to the rotor wash. Directly underneath the propeller motor mount, the absence of rotor wash led to warmer temperatures than the reference, as a result of the self-heating of the thermistors and hot air being advected from the motors. Between the propellers, the rotor wash was also close to zero and the test sensor was slightly warmer than the reference due to the sensor self-heating. Close to the outer edge of the circle drawn by the propeller tip, the test sensor was affected by a warm stream of air that was attributed to frictional heating at the tip of the propellers. Less sensor heating was experienced when the test sensor was placed in a radiation shield. The recommended optimal position for measuring environmental temperatures with an rw-UAVs is in a solar radiation shield about 5–10 cm below the propeller and one third of the length of the propeller from the propeller tip [
2]. This location provides ample aspiration while avoiding warm air streams from the motor or the propeller tips. It was concluded that using the rotor wash was an effective solution for aspirating sensors without having to design and build a custom UAV.
Further investigation into UAV-based sensor aspiration and shielding was conducted in the field by ref. [
3], using thermistors and a customized rw-UAV. Two methods to minimize the effects from non-atmospheric heat sources (motors, batteries, the UAV body, and frictional heating at the propeller tips) were proposed. In the first method, the temperature sensors were placed in a cylindrical plastic solar shield and aspirated by the propellers. In the second method, the sensors were placed inside an L-duct on the front end of the UAV and aspirated by a fan. The thermistors in the L-duct configuration exhibited a higher precision and accuracy than those aspirated by the rotor wash [
3]. However, the L-duct configuration was not optimal for observing temperature on a UAV, because (1) the sensor response time increased significantly; (2) the materials of both the UAV body and the solar shield may absorb heat; and (3) the ducts and potential fans add to the weight of the UAV, possibly reducing its flight endurance. A fan would also add to the power consumption, reducing flight endurance even further. It was concluded that aspiration from propellers may still be a viable solution, especially in conditions of weak solar heating and by orienting the UAV so that the temperature sensor is located upwind from its body.
Besides the UAV itself, meteorological conditions also influence temperature measurements taken by the rw-UAVs [
3]. The influence from the wind direction on temperature sensor placement was investigated in ref. [
1]. Sensors located on the downwind side of the UAV body recorded warmer temperatures than the sensors that were facing into the wind due to a reduction in the aspiration of the sensor on the downwind side of the UAV. The effects from both the wind direction and solar radiation were investigated in ref. [
3]. Sensors on the sunny side of a rw-UAV measured warmer temperatures than sensors on the side shaded by the UAV body, even if aspirated by the propeller wash and placed in a cylindrical radiation shield. The sensors on the sunny side also recorded warmer temperatures than a nearby tower. It was concluded that when the radiation shields were illuminated by the sun, they absorbed solar radiation as heat and did not effectively protect the sensors inside. In low solar radiation conditions, the sensors on both sides of the UAV measured similar temperatures that agreed well with the measurements from the tower. To investigate the effects of wind direction, the UAV was oriented so that the wind impinged on it from one side and so that all the sensors were exposed to direct sunlight. Measurements from the sensors on the upwind side were in good agreement with the tower measurements. The downwind side sensors measured warmer temperatures. The authors suggested that the grey plastic shell of the UAV body may have absorbed heat from the sun that was subsequently transported towards the downwind sensors. Additionally, heat from motors and propeller friction may have also been transported downwind.
The current study will build upon these important prior results as follows. First, iMET-XQ sensors with aluminum coating will be used. Many more flight experiments will be conducted, capturing a wide variety of meteorological conditions and providing statistically significant data sets. Ten different locations on the UAV will be tested, including suspended sensors. Stationary field testing was addressed in ref. [
18]. In the current paper, optimal sensor placement on the UAV is examined.
2. Data and Methodology
In this study, the iMET-XQ (InterMET Inc., Grand Rapids, MI, USA) temperature sensor performance on a rw-UAV was investigated. The versions of the iMET-XQ sensors used in these experiments are coated in aluminum to reduce the warming effects from solar and terrestrial radiation. This is based on radiosonde technology; the radiosondes are ventilated by the relative airflow during the flight [
11,
12]. The manufacturer specified the accuracy of the iMET-XQ bead thermistor sensor is ±0.3 °C and the response time is 2 s. Each iMET-XQ has its own GPS (GNSS using the GPS, Galileo, GLONASS, and BeiDou constellations) module, a Shenzhen PKCELL rechargeable lithium-ion battery, and a flash memory card for recording data. Data are downloaded manually after the flight using software provided by the manufacturer.
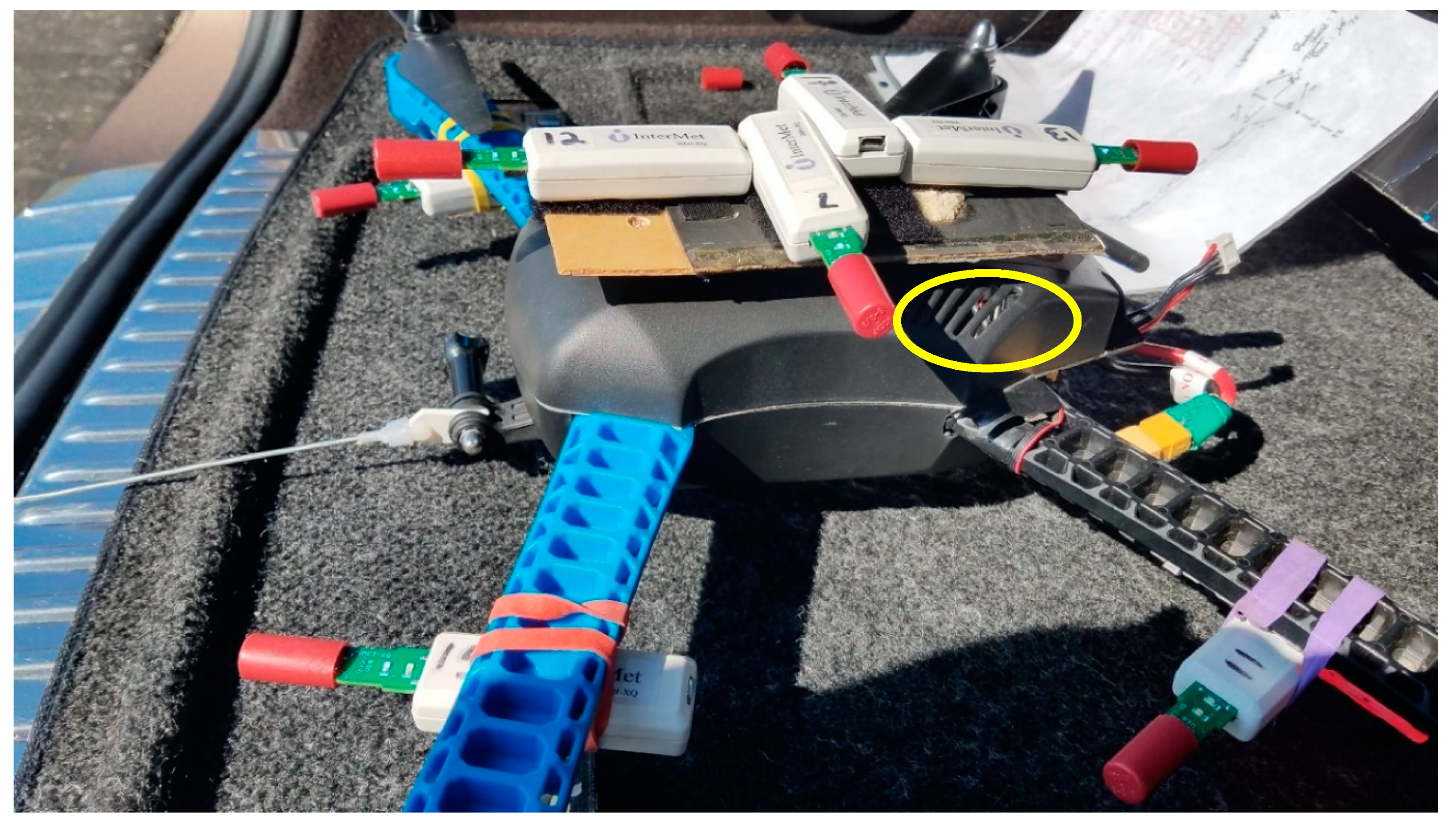
The experiments were conducted using an Iris+ quad-copter made by 3DRobotics complete with a Px4 autopilot with telemetry. The mass of the UAV including the battery was 1.28 kg. Each flight experiment was performed with ten iMET-XQ sensors placed in ten different locations (
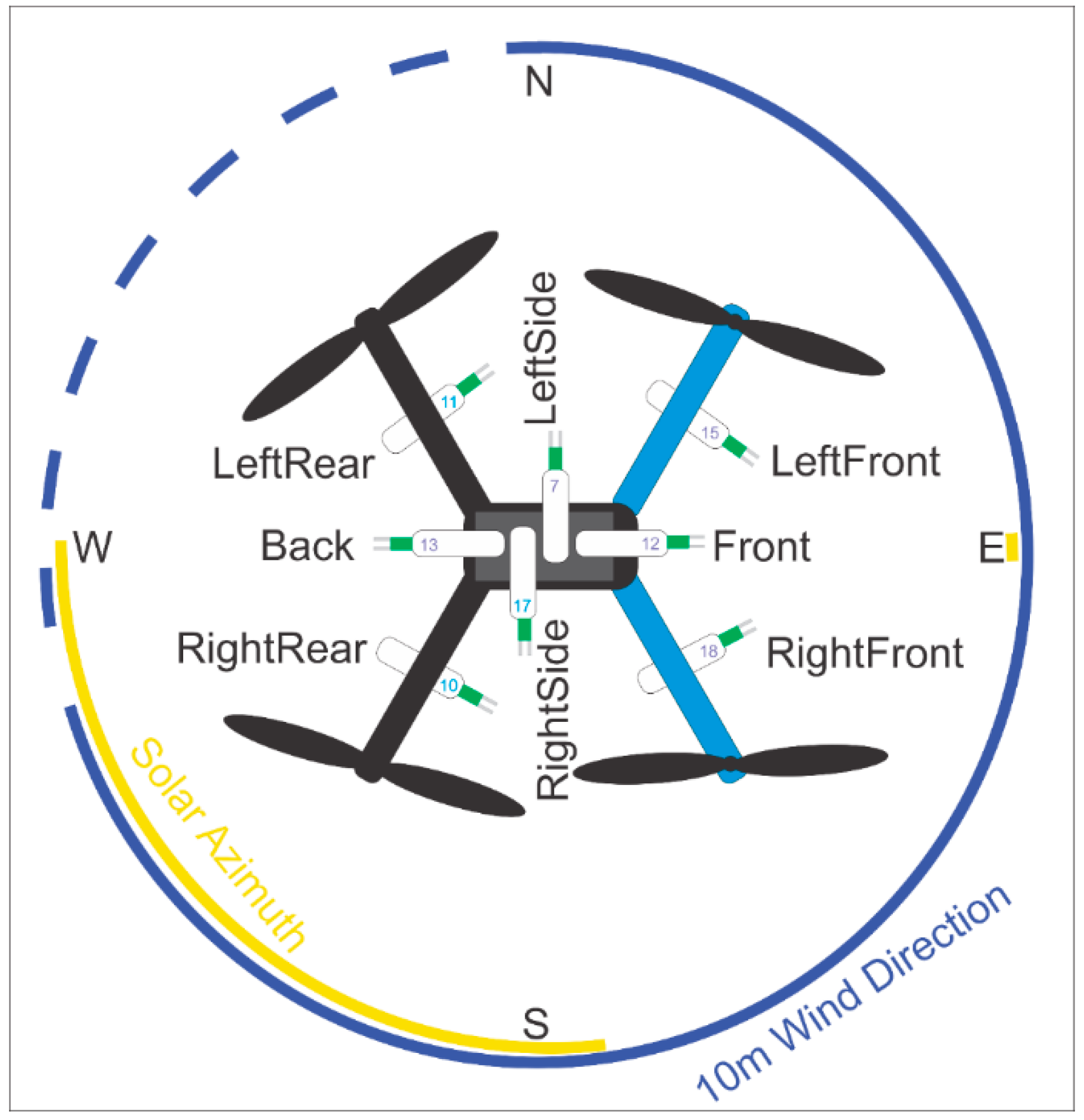
Figure 1). The iMET-XQ sensors were 15 g each. The iMET-XQ sensors were given numbers for easy identification.
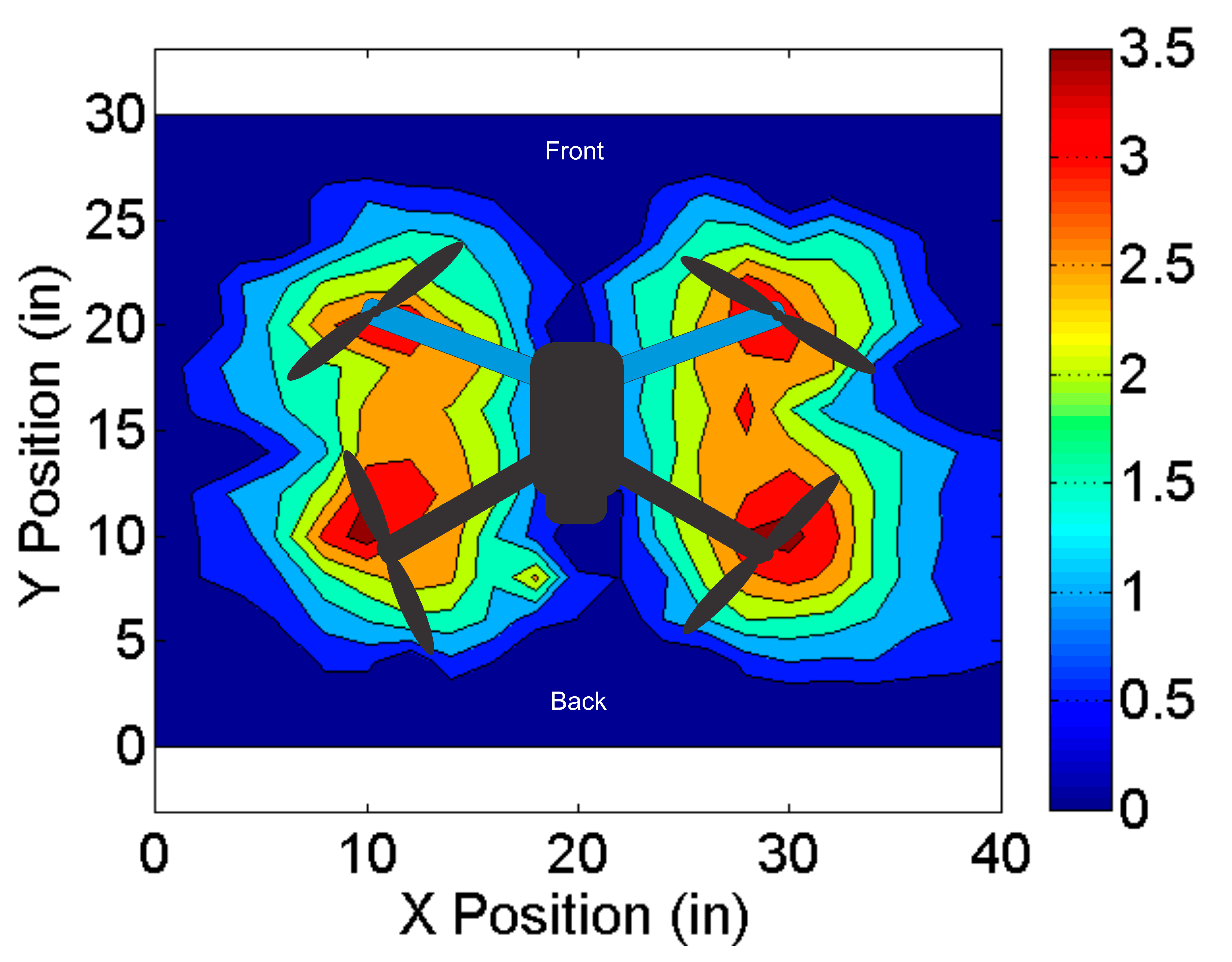
Figure 2 shows a schematic diagram of the UAV in hover mode showing the iMET-XQ numbers and their locations on the UAV. Four iMET-XQs were mounted underneath (in locations “LeftFront”, “RigtFront”, “LeftRear”, and “RightRear”) each of the 4 rotor arms of the Iris+ next to the anti-collision lights. In this location, the bead thermistor of the iMET-XQ was located 4.4 cm inward from the outer tip of the propeller as it rotated over the rotor arm. The Iris+ propeller measured 12 cm from the rotor axis to the tip. Therefore, the thermistor was located very close to one third of the length of the propeller from the propeller tip, as recommended by ref. [
2]. These 4 sensors were aspirated by rotor wash from the Iris+ (
Appendix A). Two iMET-XQ sensors were mounted on a wire attached to the front of the UAV (
Figure 1). These two sensors were suspended 21 and 44 cm below the UAV in locations “DangleHi” and “DangleLo”, respectively. The remaining four iMET-XQ sensors were placed on the top of the body of the UAV, facing in 4 different directions (“Front”, “Back”, “LeftSide”, and “RightSide”). Each iMET-XQ was always put in the same location on the UAV.
All experiments were conducted at the South Alabama Mesonet [
19] weather station (30.6944° N, 88.1944° W) on the campus of the University of South Alabama. The tower has temperature sensors at four levels: 1.5, 2, 9.5, and 10 m. The sensors at 1.5 and 9.5 m are a model 107 thermistor probe from Campbell Scientific Inc. with a manufacturer-stated accuracy of ±0.4 °C for a temperature range of −24 to 48 °C. At 2 and 10 m, HMP45C (Campbell Scientific Inc., Logan, UT, USA) platinum resistance temperature detectors are used. The accuracy of this sensor ranges between ±0.2 °C at 20 °C and ±0.3 °C at 40 °C and 0 °C. All the temperature sensors were housed in radiation shields that are aspirated by the wind. Wind speed was measured at two levels (2 and 10 m) by R. M. Young 05103 propeller wind monitors. The total solar radiation (i.e., direct plus diffuse radiation) was measured at 10 m by a Li-Cor LI200R-PT pyranometer and the vertical wind speed was measured at 10 m using a R.M. Young 27016T propeller anemometer. All the tower sensors sampled every 3 s and minute averages of temperature and wind speed measurements were archived. Pyranometer measurements were archived once per minute at the beginning of each minute. Vertical wind speed measurements consisted of an instantaneous measurement at the beginning of each minute, as well as a minimum and maximum measurement during each minute. To obtain an approximation of a minute average, the absolute values of the minimum, maximum, and instantaneous vertical wind speed measurements were averaged each minute.
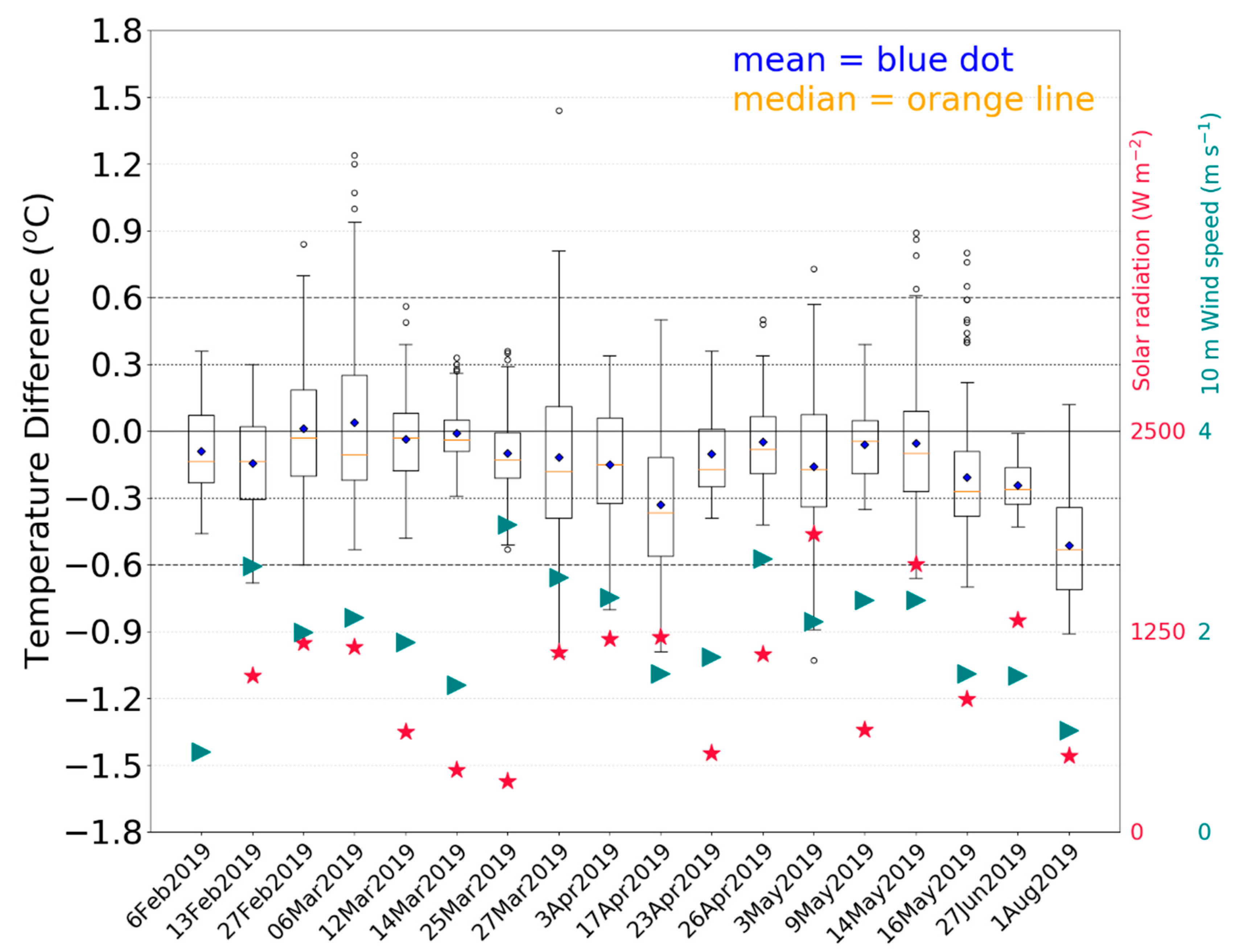
Flight experiments were conducted from February to August in 2019. Dates and other information for each experiment day are listed in
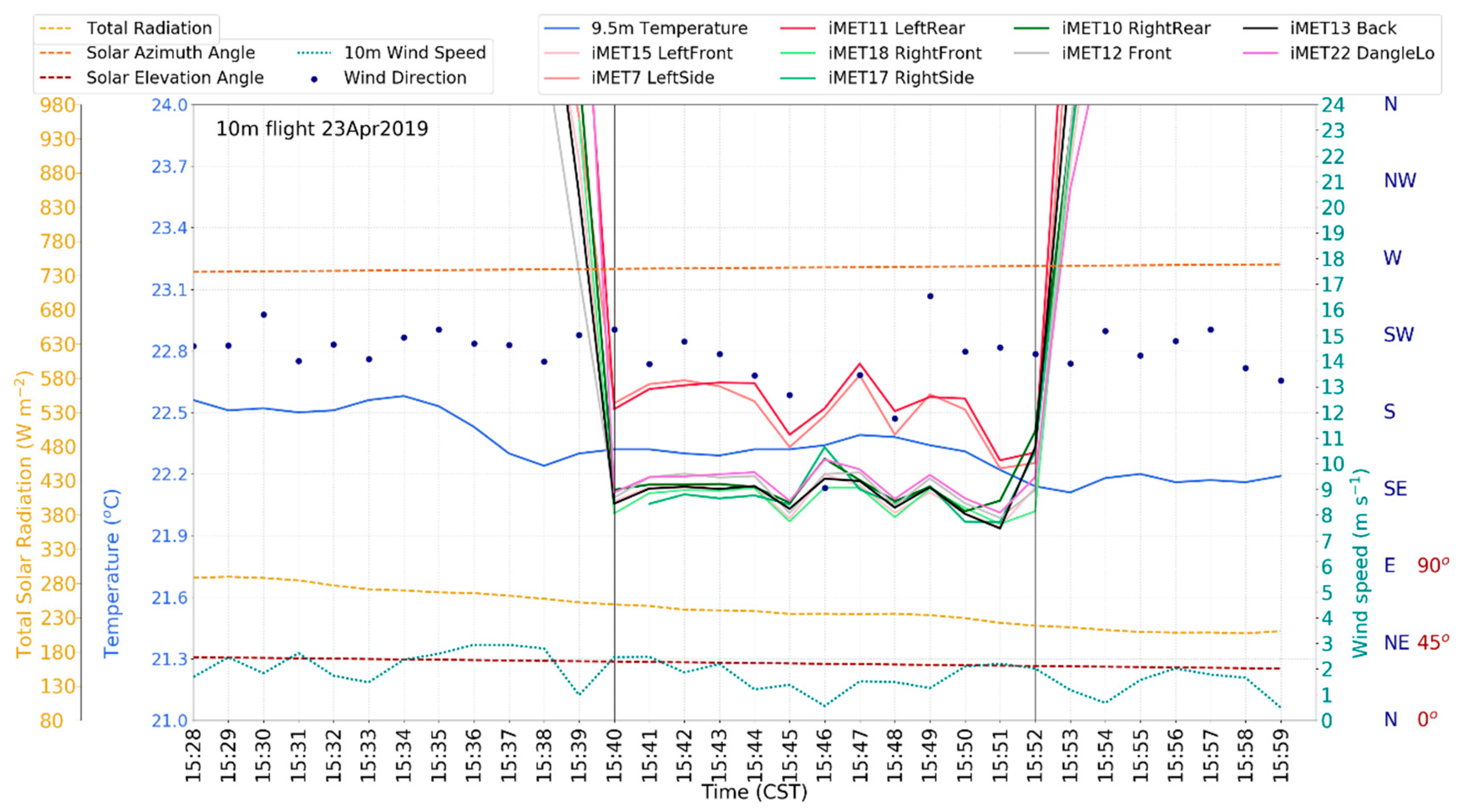
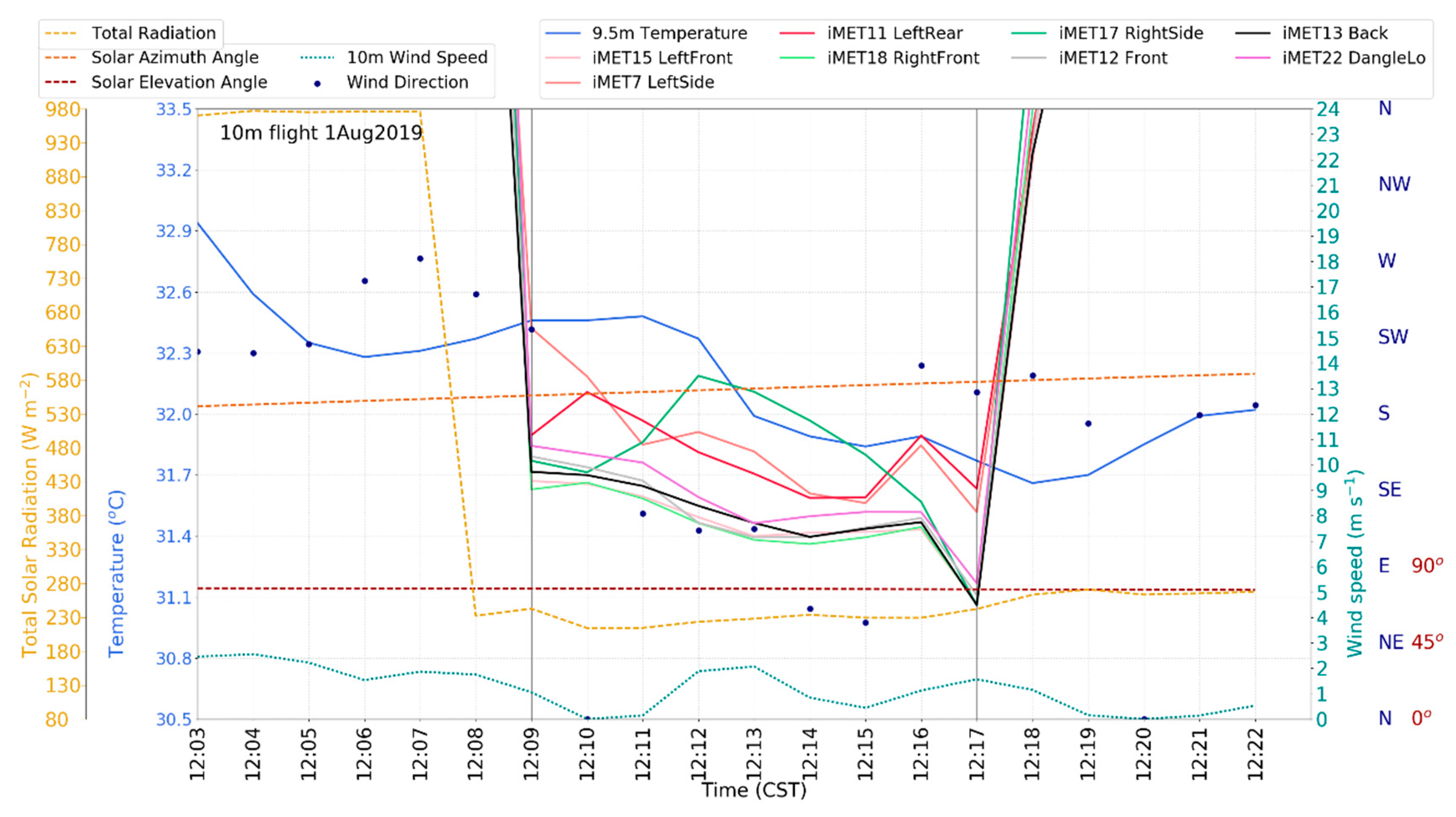
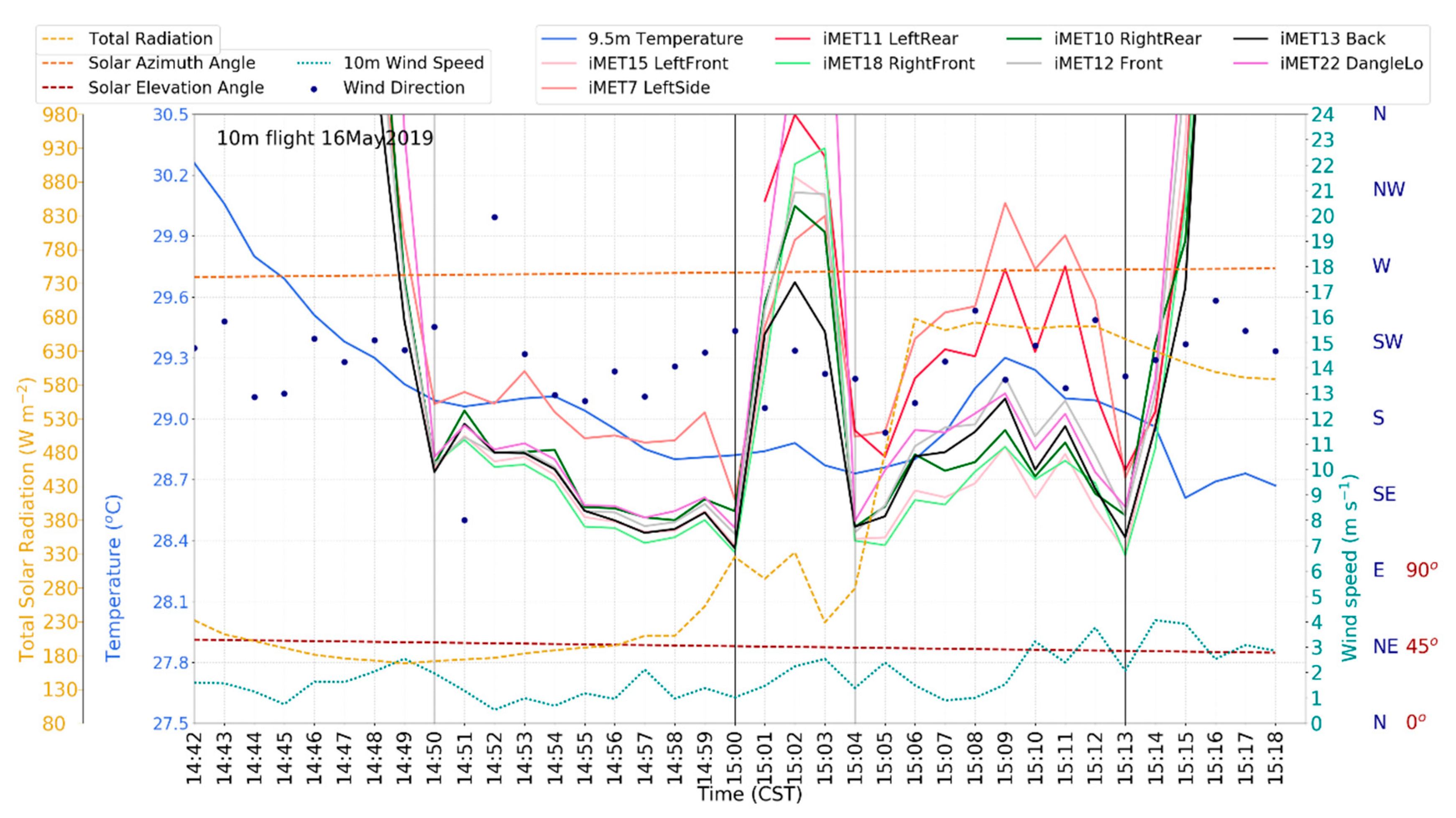
Table 3. The UAV was flown adjacent to the Mesonet tower in hover mode at approximately 10 m, at a horizontal distance less than 10 m from the tower. This way there was no spatial variability in surface fluxes, because the land-surface characteristics under the UAV and around the tower are identical. The UAV battery limits each flight to between 14 and 18 min. In order to calculate the consistent temperature differences and to quantify the statistical relationships with meteorological parameters, the iMET-XQ 1 Hz measurements were averaged over the corresponding minutes. Minutes that were completely or partly spent ascending or descending were not used in this analysis. Most of the 10 m flight experiments were carried out in the afternoon when the solar angle was between 180° (south) and 270° (west). The UAV was consistently flown facing east, meaning that the sun almost never shone directly on the front of the UAV. The Mesonet tower was located to the north of the UAV.
Both the iMET-XQ and the tower data were quality controlled using automated range checks. The upper and lower limits of the range tests were the same for both platforms (range limits are given in ref. [
18]). Values outside of these limits were set to missing. Following the automated QC range test, the timeseries of all the experiments were manually reviewed for data outliers. Outliers were identified by comparison to like sensors. For the temperature, these consisted of the temperatures from all the iMET-XQ sensors and from the 9.5 and 10 m tower sensors. The 10 m wind speed and direction values were compared to 2 m wind speed and direction. Solar radiation was compared to photosynthetically active radiation, also recorded by the South Alabama Mesonet. After completing the range test, it became clear that the pyranometer on the Mesonet tower malfunctioned on the 6 February 2019 and the data was set to missing. The same applied for the iMET21’s (in location “DangleHi”) temperature sensor, which malfunctioned (recorded large negative values) at the beginning on 12 March 2019. Sometimes, the iMET-XQ sensors randomly lost the Global Positioning System (GPS) connectivity; in those cases, no data were collected. On 6 February and 14 May 2019, iMET13, placed in location “Back” on the UAV, recorded temperatures that were up to 2.5 °C higher than the other iMET-XQ temperature sensors and the tower sensor. The iMET-XQ sensor may have been installed incorrectly on that day or the protective sensor cap may not have been removed. Data from this sensor were removed for those two experiment days.
In ref [
18], the iMET-XQ sensors were validated in terms of precision and accuracy in outdoor conditions. It was concluded that the instruments are precise and accurate and the aluminum coating on the sensors allows them to be unshielded as long as they are aspirated properly. Optimal aspiration was recommended to be 2.5 m s
−1 or greater. In this paper, the performance of the iMET-XQ sensors on a UAV will be investigated.
Morning Inversion Experiment
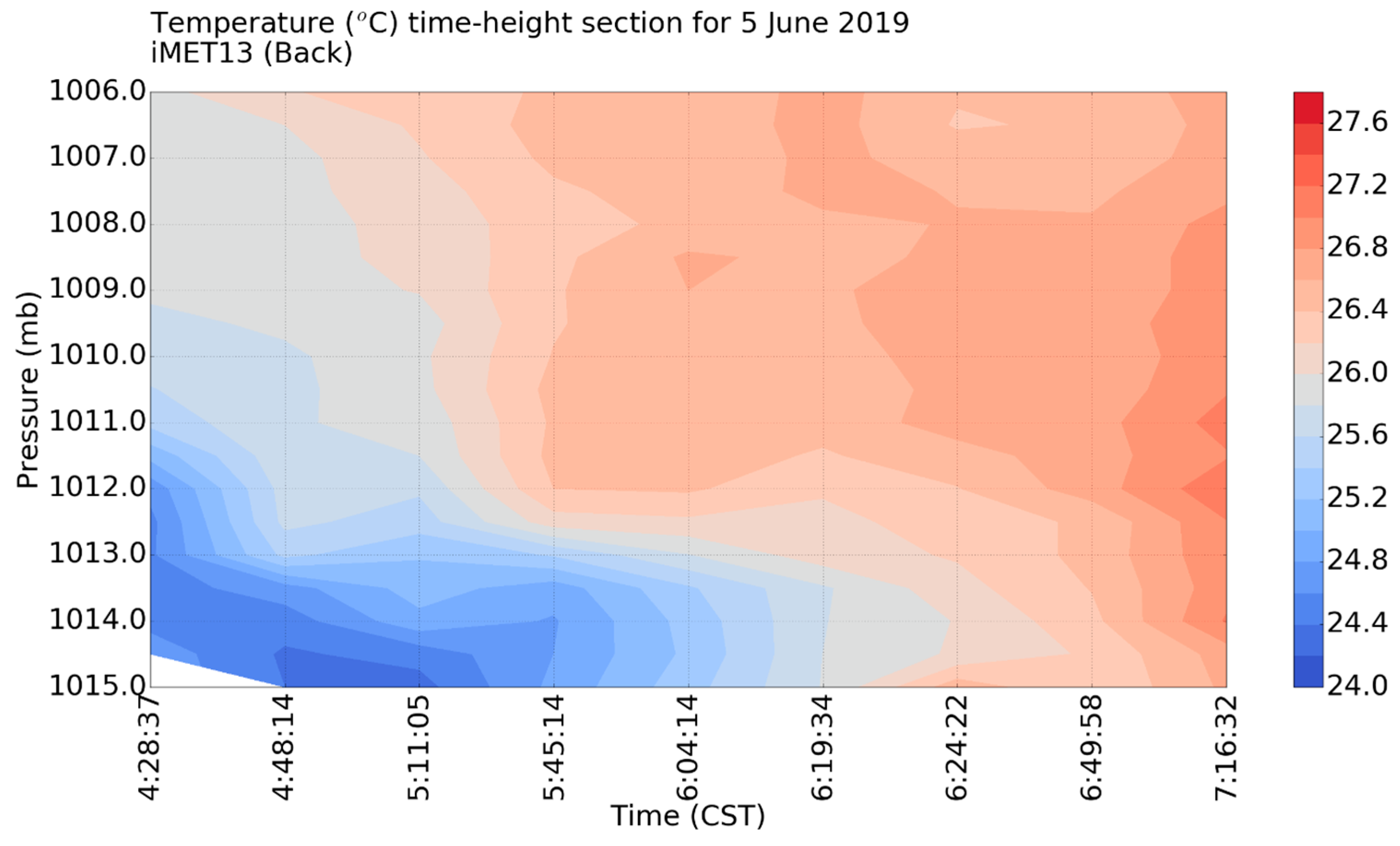
To test the capability of the UAV and the sensor package to take observations of a meteorological phenomenon, nine early morning soundings starting before sunrise, at 10–15 min intervals, up to 122 m (400 ft) were flown from a location in a public park near the University of South Alabama campus on 5 June 2019. The only iMET-XQ sensor that collected data during all nine soundings was the sensor in location “Back”. One of the suspended iMET-XQ sensors was damaged in a landing. Other iMET-XQ sensors intermittently lost GPS connectivity. Only the data from the ascending legs were used as was recommended in previous studies [
1]. This way, heat generated by the warm components in the rear half of the UAV body flowed away from the iMET-XQ sensor in the “Back” location of the UAV. The UAV ascent rate varied between 0.5 and 1.2 m s
−1; this was not at the recommended optimal aspiration of 2.5 m s
−1 [
18]. However, solar radiation was also extremely low during the flights, which reduces the need for optimal aspiration. As the UAV ascended and descended, the pressure was measured by the pressure sensor on board the iMET-XQ sensor.
4. Conclusions
In ref. [
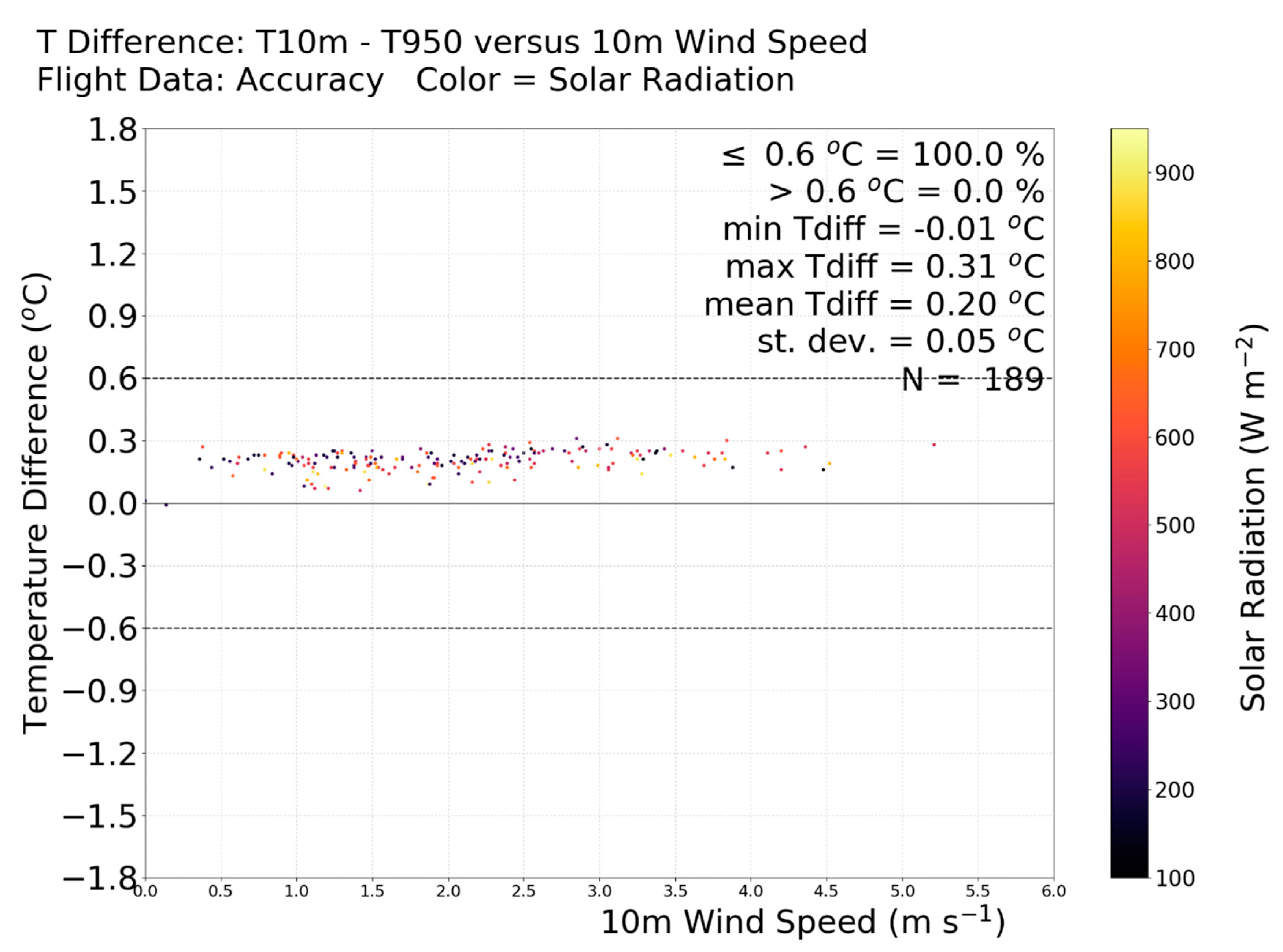
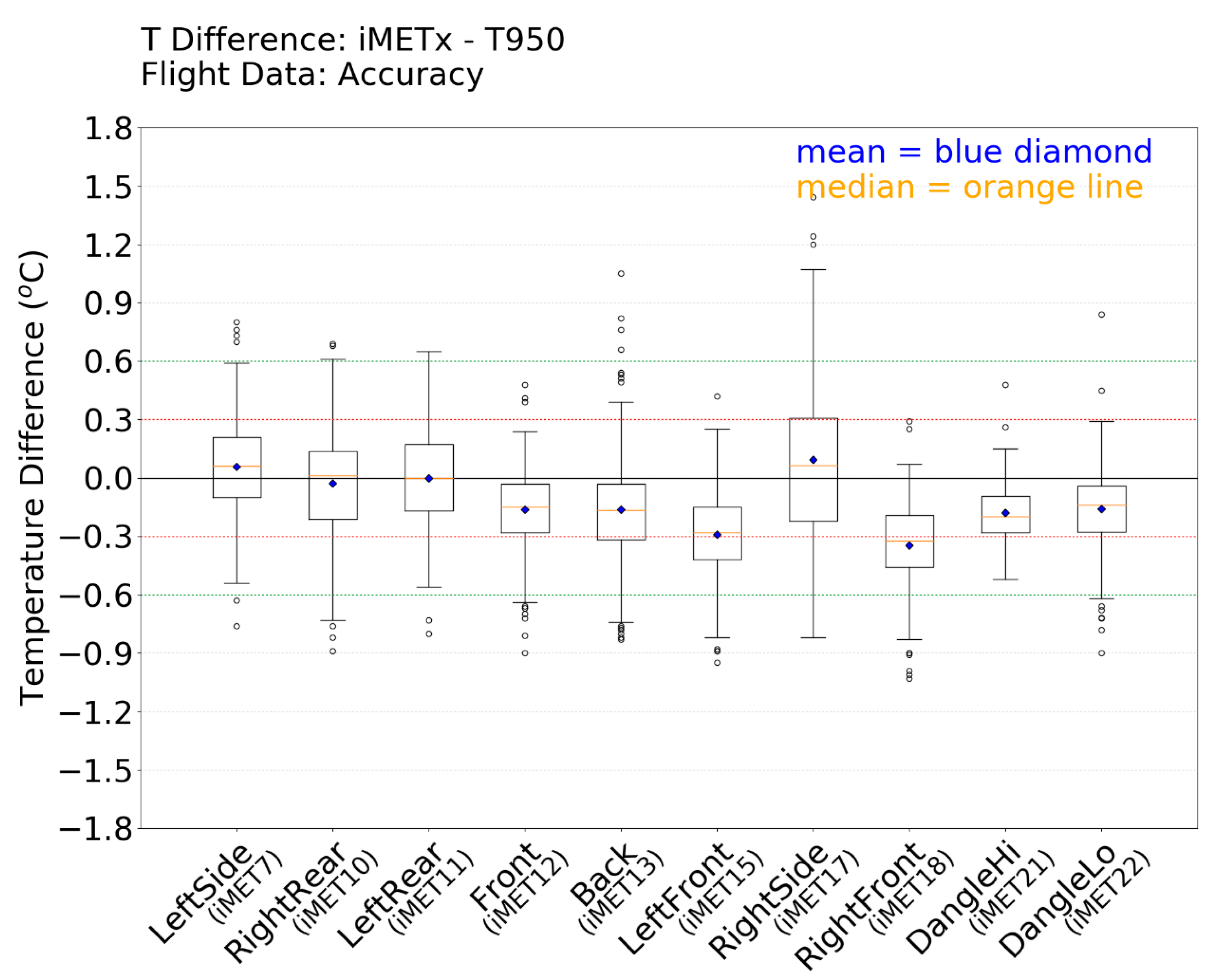
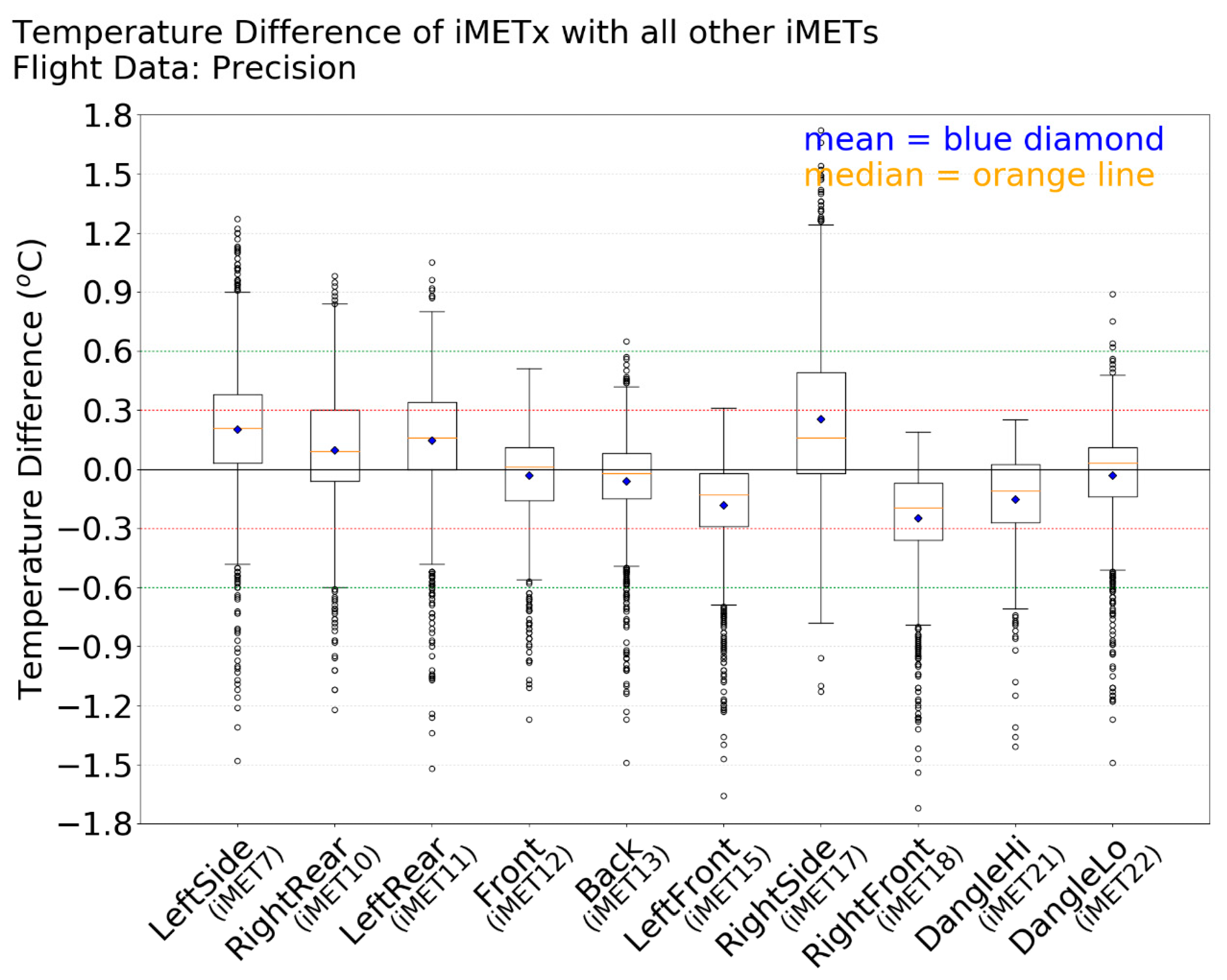
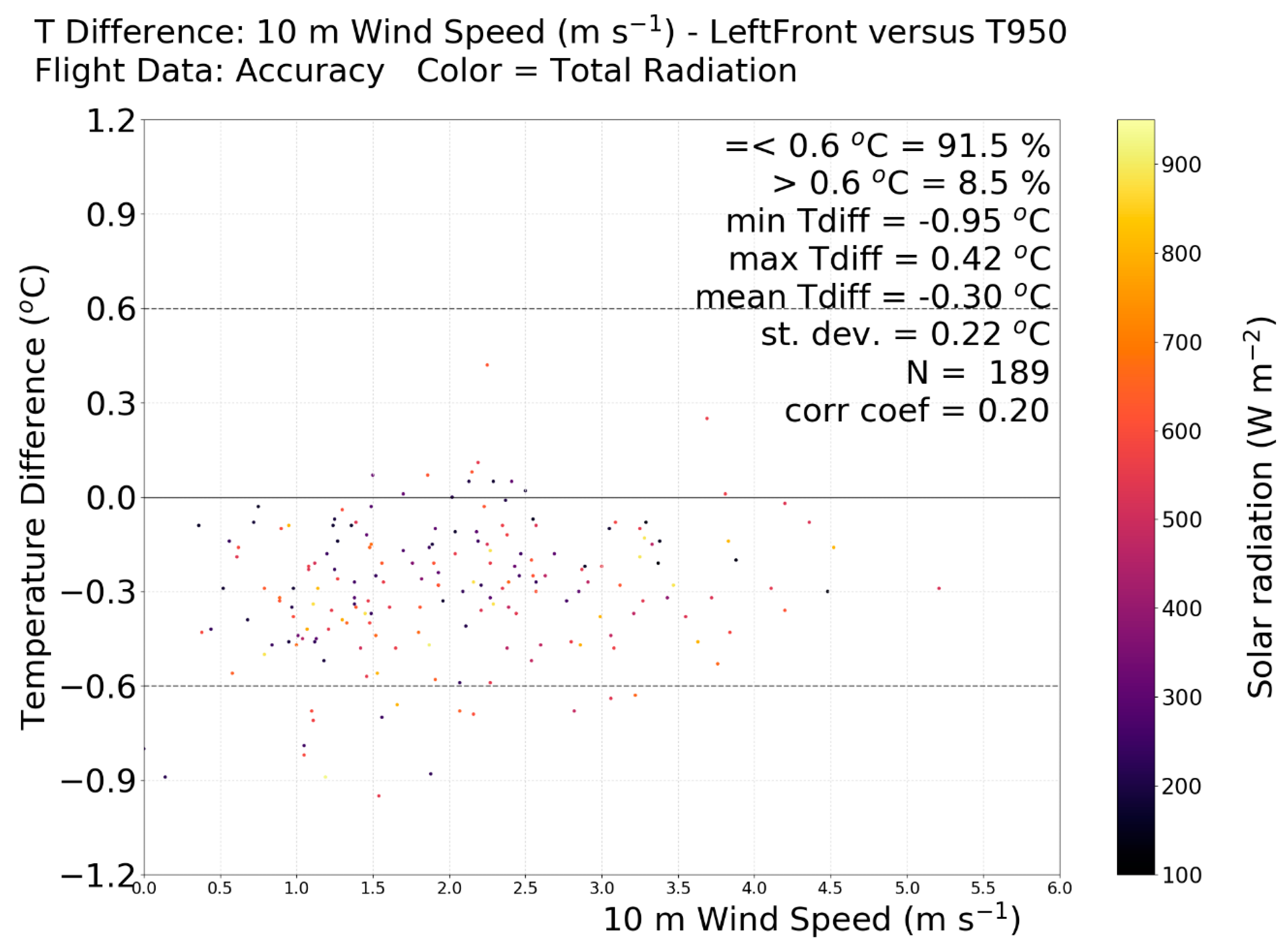
18], it was shown that for stationary experiments, the iMET-XQ sensors (1) are most precise and accurate under overcast conditions and (2) do not need to be shielded from solar radiation as long as they are properly aspirated. Here it is shown that overall (all UAV locations and all experiment days together), the iMET-XQ sensors show excellent agreement with the tower standard: 64.8% of all temperature differences are less than 0.3 °C and 93.0% are less than 0.6 °C. The mean plus or minus the standard deviation of the temperature differences is −0.23 °C ±0.24 °C. However, limiting the use of UAVs to overcast conditions is not a practical solution, because in many cases the objective of field campaigns is to measure phenomena that vary with solar intensity including land-use change studies, urban heat island effects, atmospheric turbulence, and surface heat/moisture fluxes.
Both the UAV and the environment influence the accuracy (agreement with reference sensor on the Mesonet tower) and precision (agreement amongst iMET-XQ sensors) of iMET-XQ temperature measurements. The interplay between the effects from the warm UAV elements and the environmental conditions can be complex.
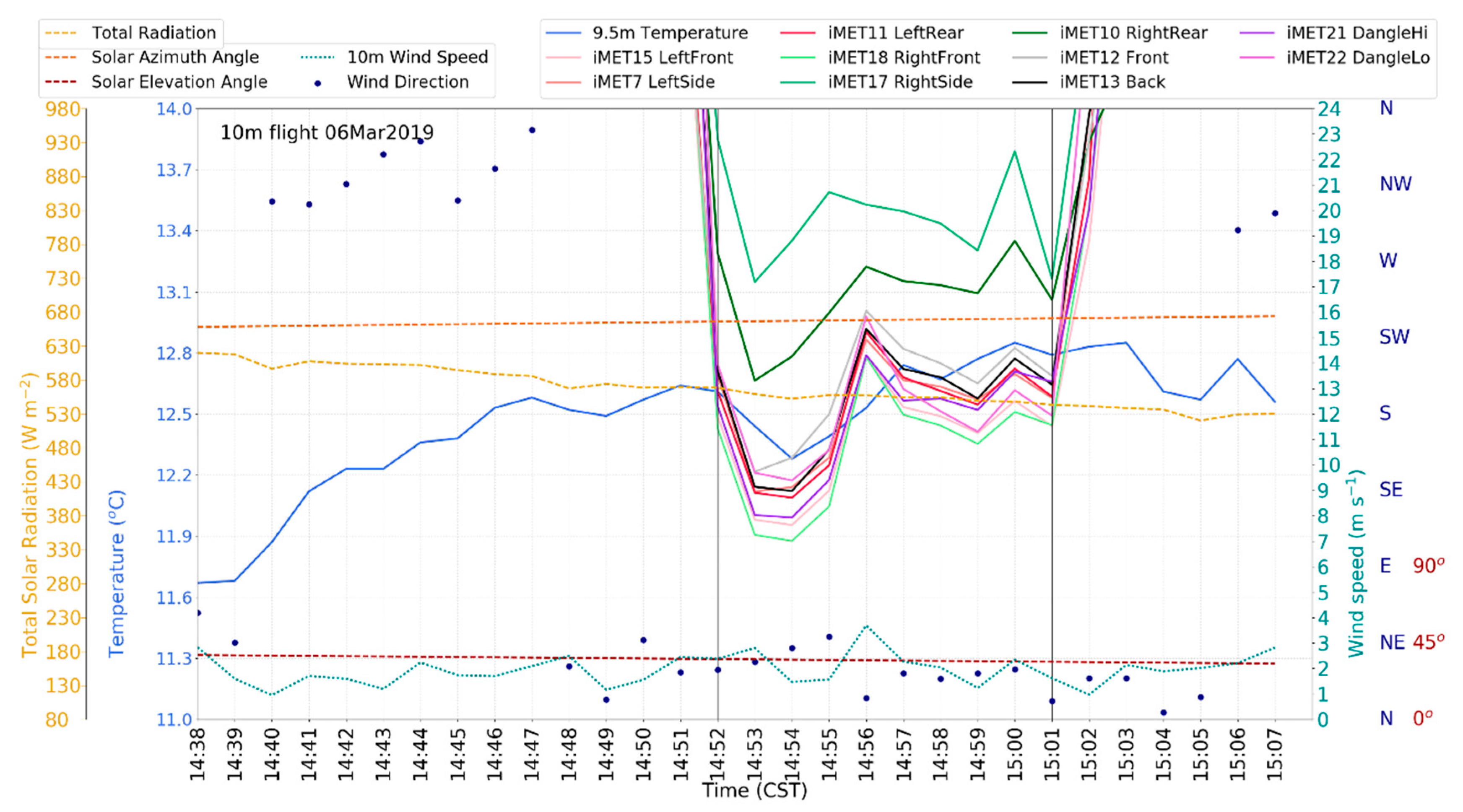
Infrared radiation, or heat, generated by the electronic components in the rear half of UAV body has a significant influence on the iMET-XQ temperature measurements, regardless of solar radiation conditions. However, this is highly dependent on wind direction. If the sensors located on the rear half of the UAV body are downwind from the UAV body, they record temperatures that are warmer than the other iMET-XQ sensors and warmer than the Mesonet tower sensor. This is the case even if the sensors are aspirated by propwash. This is in agreement with the conclusions from ref. [
3], where the authors suggested that the grey plastic shell of the UAV body may have absorbed heat from the sun, that was subsequently transported towards the downwind sensors. In their study, however, there was no mention of heat generated by electronic components inside the UAV body.
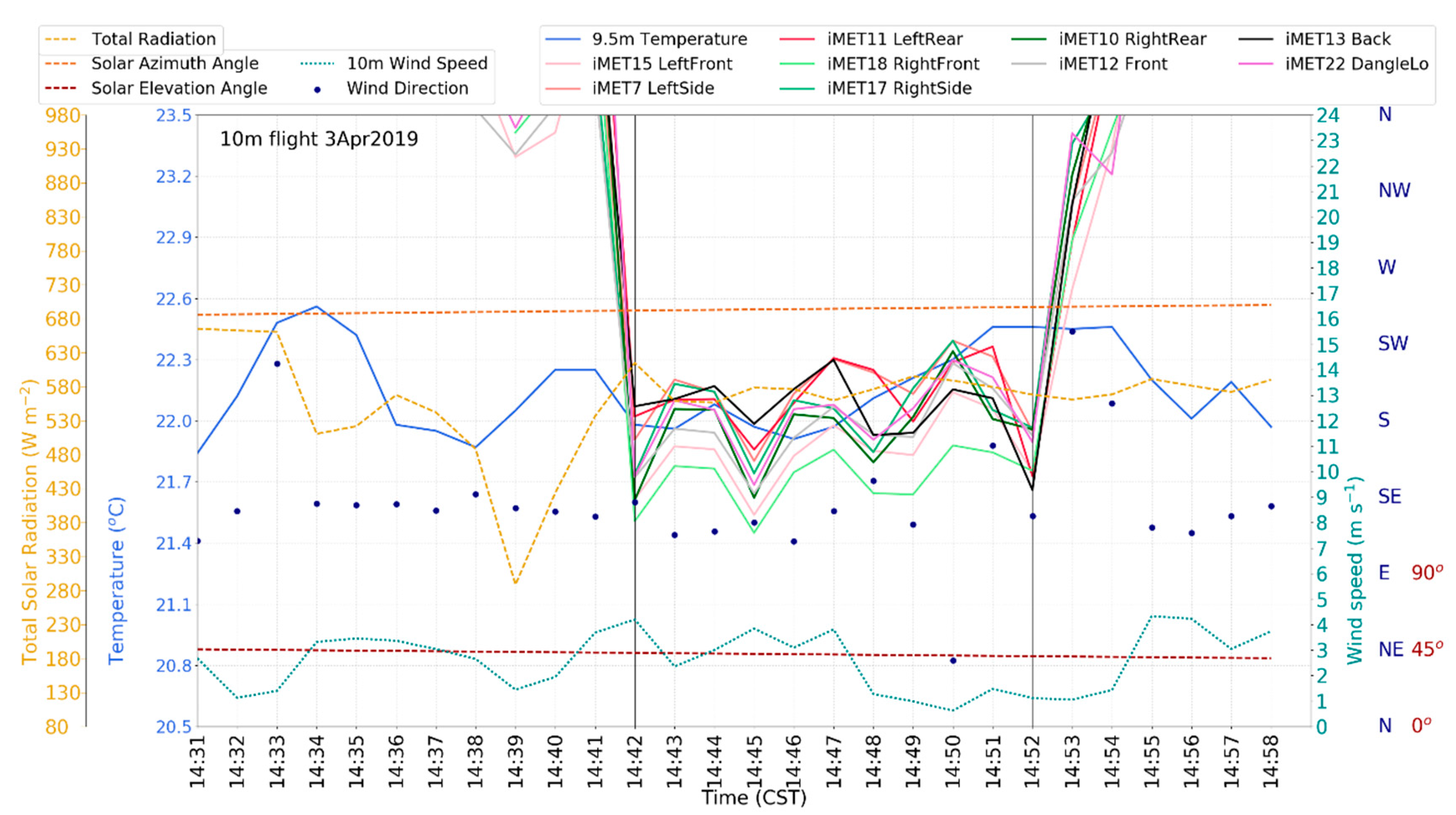
During high solar radiation conditions, the iMET-XQ sensors are less precise and larger differences between the temperature measurements from the iMET-XQ sensors in different locations on the UAV are seen. Turbulent eddies transport heat unevenly, causing the different sensors to record warmer temperatures at different times. Changing wind directions may also unevenly distribute the heat generated from the UAV body, from the rotor motors on the end of the UAV propeller arms, and from propeller friction.
Measurements from the iMET-XQ sensors suspended below the UAV perform quite well, especially if located far enough from the body of the UAV to not be susceptible to heat being advected or blown from the body of the UAV, but close enough to benefit from propwash.
iMET-XQ sensors placed on the front rotor arms perform best, because (1) they are far enough removed from the rear half of the UAV body where the heat sources from the electronic components are located and (2) they benefit from aspiration from the propeller wash. These sensors show a strong cool bias compared to the tower standard, primarily because the tower sensor is aspirated by natural wind flow, causing it to warm up more than the well aspirated iMET-XQ sensors on the front-facing rotor arm. It was shown that during stronger winds, the measurements of all three sensors converge.
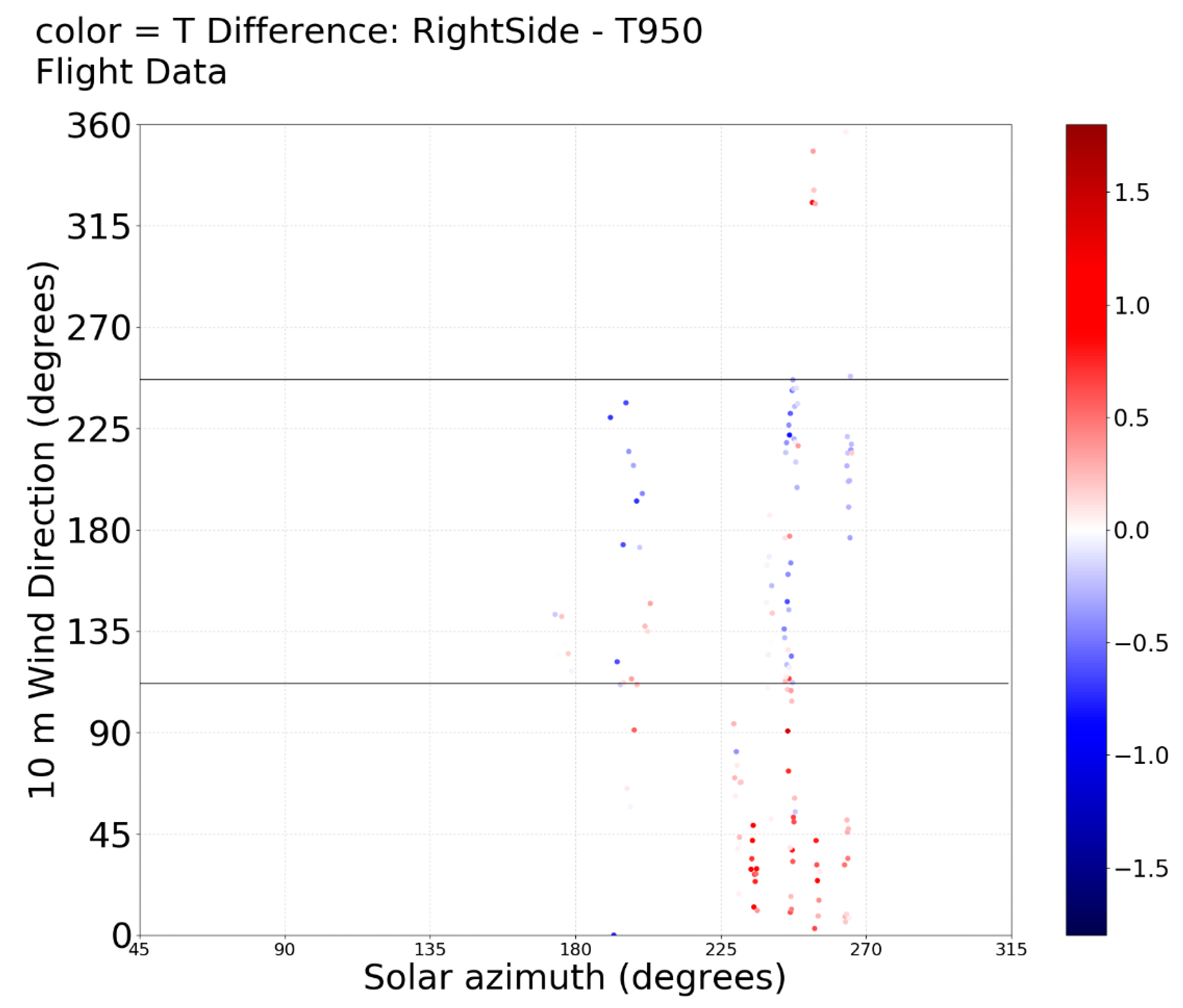
It is likely that the orientation of the iMET-XQ units relative to the sun plays a role in the accuracy of its temperature measurement. This was seen for the location RightSide in
Section 3.3. In ref. [
18], the stationary sensors were configured so that they always faced in the same direction. In future work, the experiments to assess the bias resulting from sensor orientation, could consist of iMET-XQ sensors mounted on a horizontal round board near the tower and placed in 30 degree increments (12 sensors) around the periphery of the board, in varying weather conditions, solar azimuth and elevation angles. By comparing the iMET-XQ temperature measurements to the tower reference, it can be determined if the iMET-XQ orientation relative to the azimuthal solar angle and solar elevation angle has an impact on the temperature measurements.
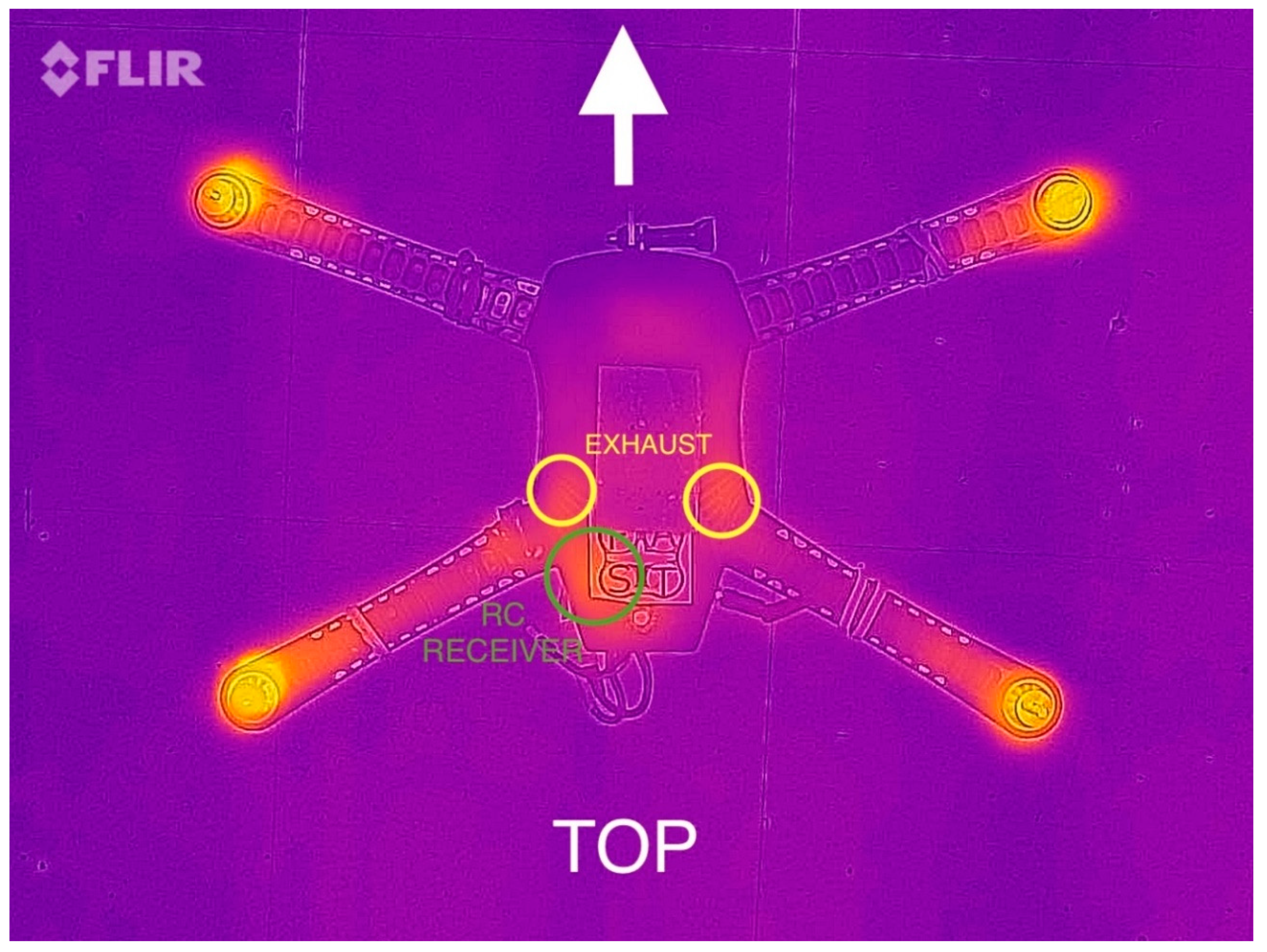
It is imperative that when using an off-the-shelf UAV for atmospheric sensing, the electronic components inside the body of the UAV are properly located. Exhaust vents can be helpful in locating these components. A more accurate procedure for locating hotspots within the UAV body is running the UAV indoors without propellers and using an infrared camera to locate the hotspots.
Based on the results from this study, we provide the following advice for other researchers using the iMET-XQ sensor on a UAV. After the UAV body hotspots have been located, position the iMET-XQ underneath the rotor arms that are the furthest away from any heat sources in the UAV body. Following the recommendations from [
2], position the sensors one third of the length of the propeller away from the propeller tip to prevent influences from propeller friction. Suspending sensors below the UAV body may also be viable, but further testing to determine the optimal distance beneath the UAV body is required. Additionally, when ascending, heat from the UAV body may flow downstream, affecting suspended instruments.
It is recommended that as many sensors as affordable be placed on the UAV. Additionally, if only two rotor arms are viable (due to UAV body heat sources), mount two sensors under each arm with the sensing elements facing in opposite directions. Sensor redundancy will prevent data loss in case sensors momentarily or permanently lose GPS connectivity or break during flight. In this study, unexpected strong wind gusts have caused two crash landings, leading to the permanent loss of at least one sensor.
Sensor redundancy also allows for quality control. By comparing time series or temperature difference distributions (boxplots), any outlying sensors can readily be identified and data from these sensors can be removed. The averages of observations from the remaining sensors will provide accurate data. By systematically removing one sensor at a time and plotting the boxplots of the temperature differences of all unique sensor pairs, bad sensors can be identified. If the boxplot displays a smaller spread (length of box equals inter-quartile range) and/or shorter whiskers after removing a given sensor, this is an indicator that a particular sensor collected invalid or outlying data values. This bad data can be the result of the sensor being located downwind from the UAV body. Wind direction cannot always be determined because the UAV will either need to be equipped with a wind sensor or flown near a tower. In many scenarios, this will not be the case. The above described technique will allow such locations to be identified and removed from the data sample.
When hovering a UAV in a fixed position next to an instrumented tower, the shaded and upwind side of the UAV can easily be identified. Placing unshielded temperature sensors in that location on the UAV would provide good results. However, when there is no instrumented tower in the vicinity and/or the UAV is flying transects that cause the shaded and upwind sensors to switch sides, obtaining quality temperature measurements will be a bigger challenge. This is where placing a sensor in an aspirated radiation shield would come into its own, except for the addition of weight and power consumption. Alternatively, it might be possible to postprocess the data using an algorithm that calculates the best (i.e., shaded) sensor location, based on the solar angle and the azimuth (calculated from the GPS time and date stamp) and the UAV heading, pitch, and roll (calculated from the on-board IMU). Additionally, thermal inertia could be taken into account by discarding a few observations when the location of the best/shaded sensor changes. The impacts from the heat of propeller friction or rotor motors were not quantified in this study. However, it was shown in infrared photography that rotor motors generated significant hotspots in laboratory settings. If these two heat sources turn out to be significant in-flight conditions, quadcopters may be better options than octocopters for a choice of UAV. This should be further investigated. Future work should include determining the magnitude and location of thermal hot spots within the UAV body and from rotors and rotor engines while the UAV is in flight. Experiments could consist of flying the UAV in a large indoor chamber where infrared cameras are suspended from walls and ceilings to observe all sides of the hovering UAV.
Rotary wing UAVs are not typically going to hover in practical applications; they will either take vertical profiles or fly in horizontal transects. Therefore, the sensors will be naturally aspirated by the relative airflow in a manner analogous to rawinsonde technology, which the iMET-XQ sensors are based on. In other words, the hover validations presented in this study are worst case; the iMET-XQ sensors likely perform even better in real applications.
Refs. [
20,
21] show that the temperature sensors placed within well aspirated solar shields are the gold standard for in situ measurements. They document that unaspirated temperature sensors have a warm bias during the day and a cool bias at night. Unfortunately, both radiation shields and fans add weight and fans require power. Both are challenging when using small UAV-based sensing. Small UAVs have a limited payload capacity (400 g in the case of the Iris+ used in the current study) and the power supply is limited by battery technology. The challenge with UAVs is that they have to carry their power supply with them. Every gram carried on a UAV translates to a reduction in flight time. The use of unshielded, rotor wash-aspirated, aluminum-coated iMET-XQ sensors may be the next best solution, for now. In ref. [
18], the temperature measurements of a shielded iMET-XQ sensor and an exposed iMET-XQ sensor were compared. As expected, a shielded iMET-XQ records cooler temperatures than an exposed unit. This is especially true in weak winds when the exposed iMET-XQ sensor, as expected, heats up too much. However, as the wind speed increases, the temperature differences between a shielded and exposed unit approach zero. This confirms that the aluminum-coated iMET-XQ sensors do not need to be shielded as long as they are properly aspirated; an exposed unit records almost identical temperatures to a shielded unit as long as the aspiration is adequate (greater than 3.0 m s
−1). Radiosondes rely on the same principle as they are ventilated by the relative airflow during the flight [
16,
17]. In ref. [
4], it was found that the UAV-based sensors that were aspirated only (they reported that the majority of aspirated sensors were aspirated by rotor wash), agreed well with the shielded tower reference; showing only a very slight cool bias. It was not mentioned if the tower reference sensors were aspirated or unaspirated.
In order to gain a better understanding of the difference between the UAV-based measurements and a reference sensor, future work could include hovering a UAV in a large indoor chamber without sunshine and without airflow. The iMET-XQ sensors would be placed in the same locations on the UAV as done here. Wind speed and direction and the solar radiation would be introduced using a fan and incandescent light source, respectively. The fan and light source could be mounted on a circular track surrounding the UAV, allowing the azimuthal angle to vary incrementally. A reference sensor in an aspirated shield, an identical sensor in an unaspirated shield, as well as an anemometer and a pyranometer could be installed under the UAV such that they are exposed to the same conditions. A full range of environmental conditions could be simulated by systematically incrementing wind speed, azimuthal angle, and light intensity in steps, producing a full suite of environmental conditions of all possible combinations. Temperature measurements would be compared to the aspirated and shielded reference sensor. Additionally, the unaspirated and aspirated reference temperature measurements should be compared. This would not only prevent waiting for the atmosphere to produce the required conditions, it would also provide a comparison to a true validated reference standard and assess any biases from not using an aspirated reference sensor.
Another currently available solution is the use of tethered UAVs where gasoline engines on the ground transmit power via a tether. These are not as mobile as a traditional UAV, but definitely more mobile than static towers. However, we foresee a scenario in the near future where battery technology evolves to develop a large enough capacity that shielded, fan-aspirated temperature sensors will become a reality. Ref. [
3] underlines that the materials of solar radiation shields may absorb heat that could be emitted to the temperature sensors inside, so a fan is required. In fact, work is in progress to develop effectively aspirated shields for UAV-based temperature sensors where the sensors are properly aspirated to reduce the effects from solar heating [
2,
3].




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}