Evaluating Human Movement Coordination During Immersive Walking in a Virtual Crowd

 and
and
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
3.1. Participants
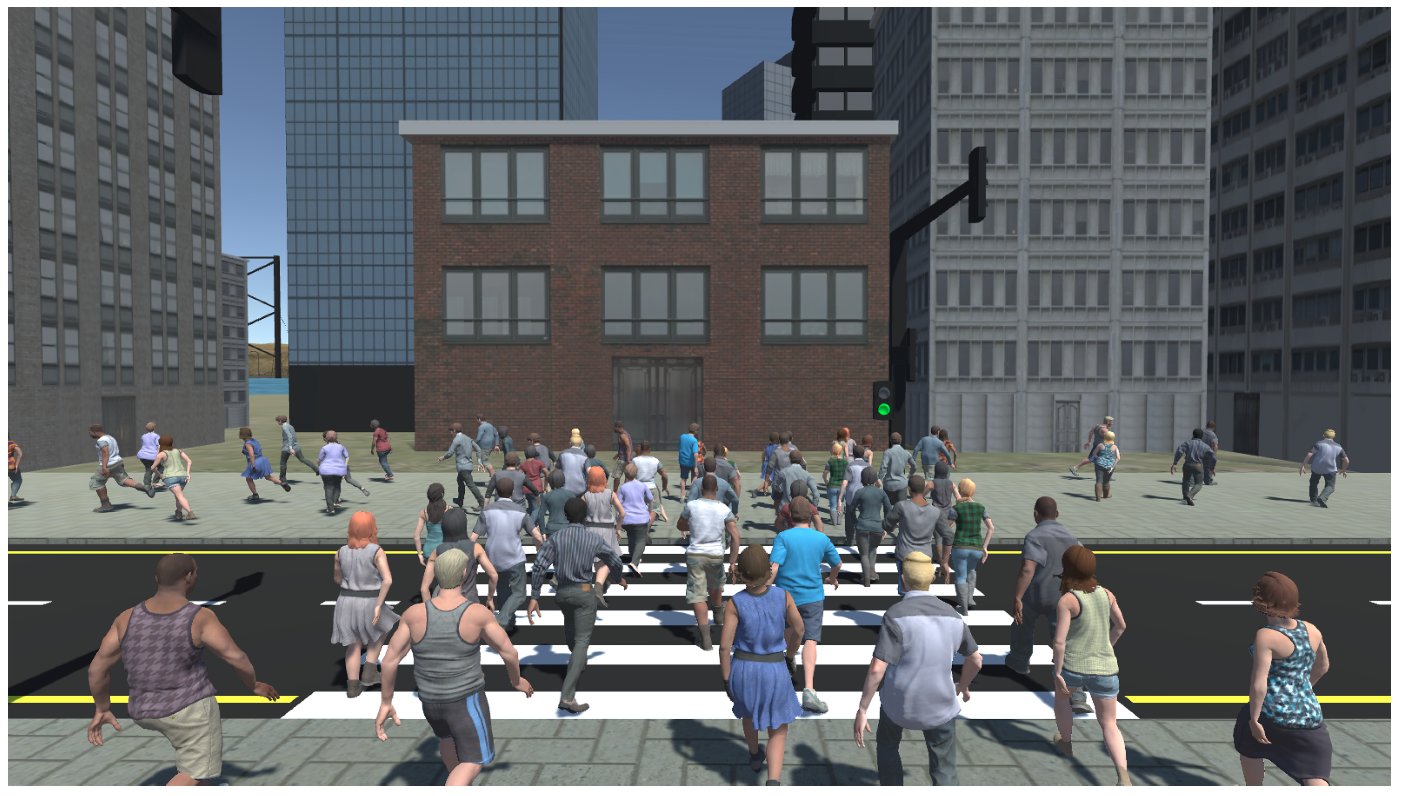
3.2. Setup and Virtual Reality Application
3.3. Measurements
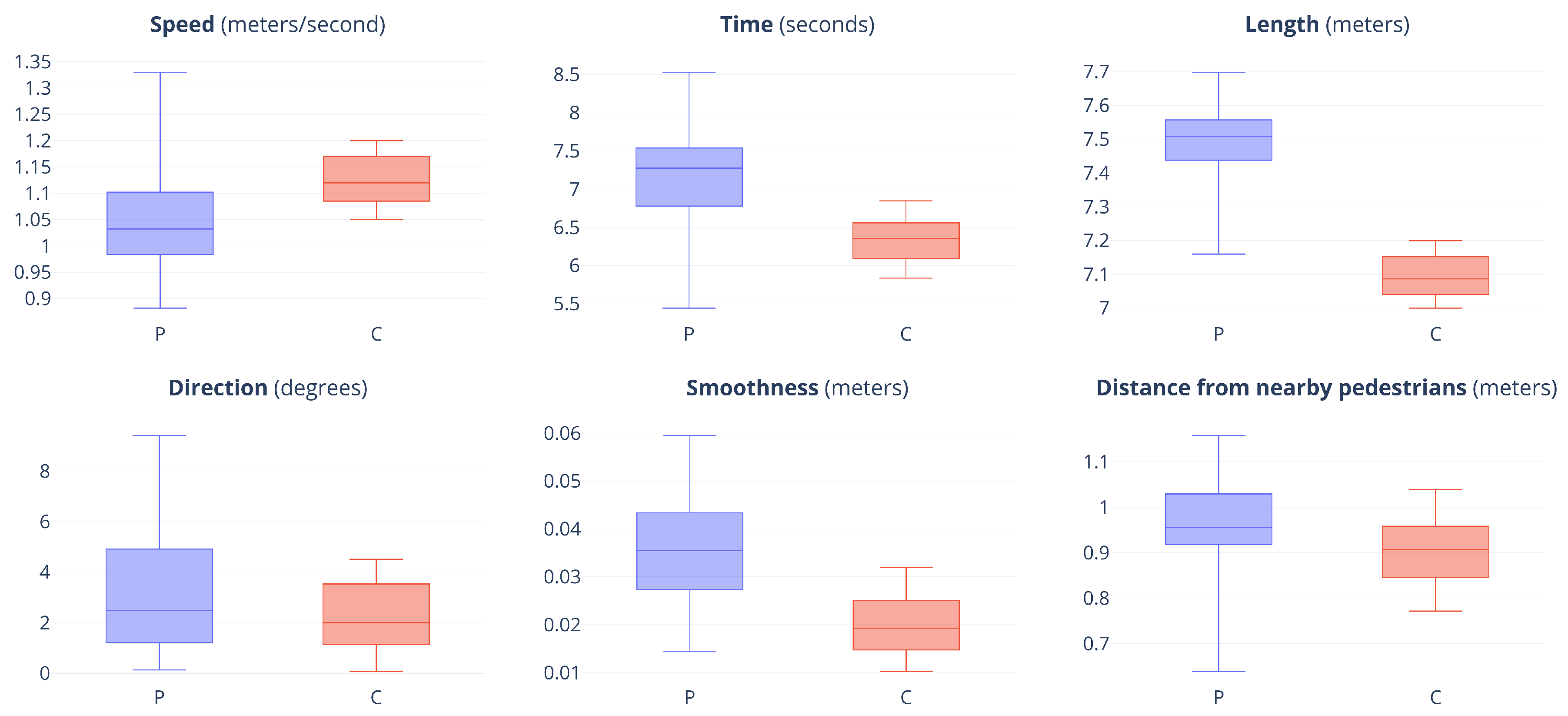
- Speed: The average speed of the participant’s walking motion when crossing the virtual crosswalk. The speed was measured in meters/second.
- Time: The time a participant needed to cross the virtual crosswalk (reach the opposite sidewalk). The time was measured in seconds.
- Length: The total trajectory length (covered distance) of the participants. The length of the captured trajectory was measured in meters.
- Direction: The average absolute y-axis rotation on the plane of the participant when walking toward the opposite sidewalk. Direction was measured in degrees. Zero degrees indicated that the participant was moving parallel to the segment that connected his/her initial position and the forward position on the opposite sidewalk.
- Smoothness: The smoothness was computed as the average flicker of the trajectory, as in [74]. Low flicker values denoted a smoother trajectory. The smoothness was measured in meters.
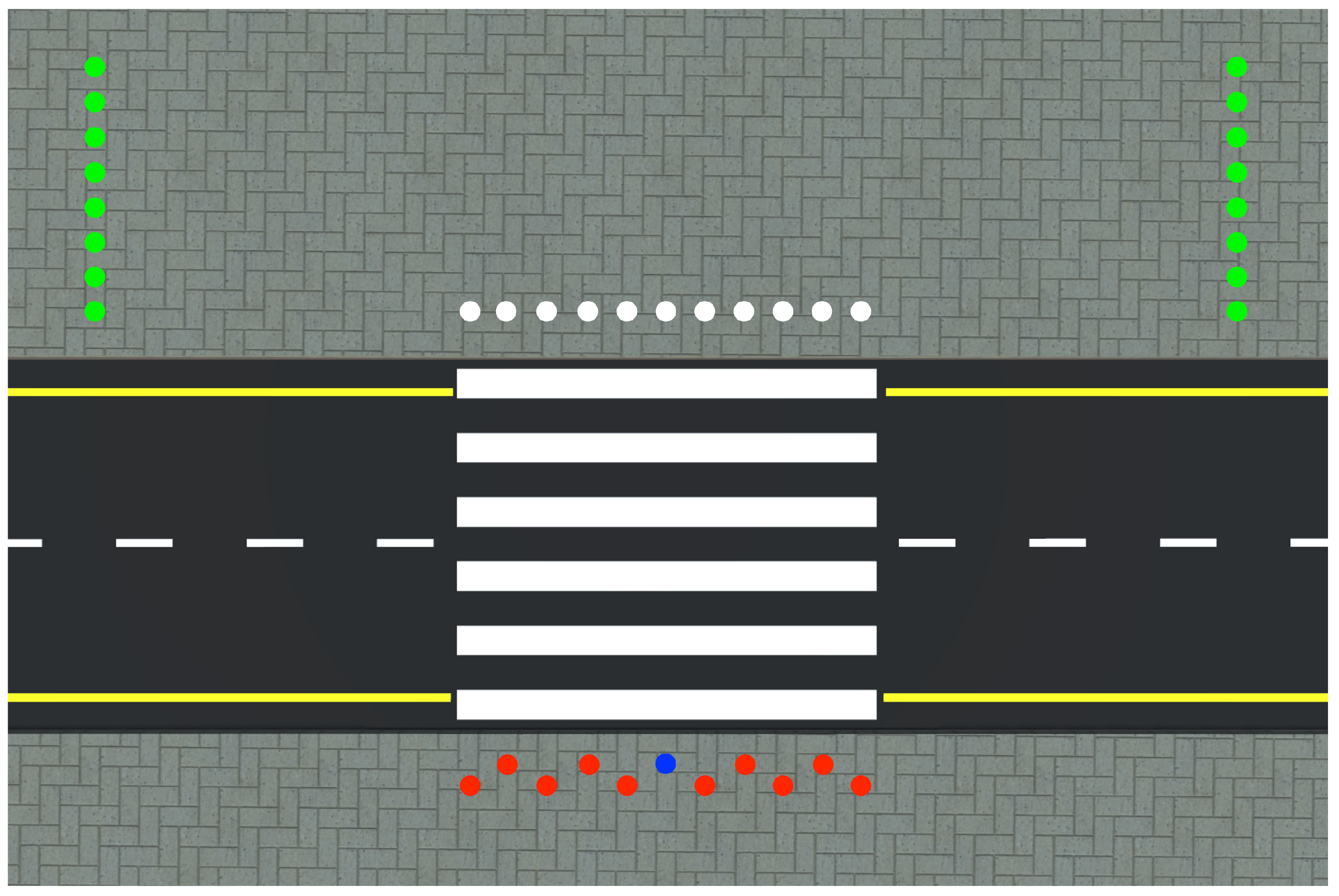
- Distance from nearby pedestrians: We computed the average distance from the closest four virtual pedestrians in front of the participant when moving toward the opposite sidewalk. The chosen virtual pedestrians were the same for the participants and the simulated characters and did not change during the walking task. Note that for each trial, different nearby virtual pedestrians were chosen. The distance from nearby virtual pedestrians was measured in meters.
3.4. Procedure
3.5. Simulated Characters
- Separation: the simulated characters should steer to avoid crowding nearby virtual pedestrians.
- Alignment: the simulated characters should steer toward the average heading of nearby virtual pedestrians.
- Cohesion: the simulated characters should steer toward the average position of nearby virtual pedestrians.
4. Results
4.1. Movement Behavior Differences
4.2. Movement Behavior Relationship
5. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Marsh, K.L.; Richardson, M.J.; Baron, R.M.; Schmidt, R. Contrasting approaches to perceiving and acting with others. Ecol. Psychol. 2006, 18, 1–38. [Google Scholar] [CrossRef]
- Jiang, Y.; O’neal, E.E.; Yon, J.P.; Franzen, L.; Rahimian, P.; Plumert, J.M.; Kearney, J.K. Acting together: Joint pedestrian road crossing in an immersive virtual environment. ACM Trans. Appl. Percept. 2018, 15, 8. [Google Scholar] [CrossRef]
- Schmidt, R.C.; Carello, C.; Turvey, M.T. Phase transitions and critical fluctuations in the visual coordination of rhythmic movements between people. J. Exp. Psychol. Hum. Percept. Perform. 1990, 16, 227. [Google Scholar] [CrossRef]
- Zivotofsky, A.Z.; Gruendlinger, L.; Hausdorff, J.M. Modality-specific communication enabling gait synchronization during over-ground side-by-side walking. Hum. Mov. Sci. 2012, 31, 1268–1285. [Google Scholar] [CrossRef]
- Zivotofsky, A.Z.; Hausdorff, J.M. The sensory feedback mechanisms enabling couples to walk synchronously: An initial investigation. J. Neuroeng. Rehabil. 2007, 4, 28. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavioral Model; ACM: New York, NY, USA, 1987. [Google Scholar]
- Loomis, J.M.; Knapp, J.M. Visual perception of egocentric distance in real and virtual environments. Virtual Adapt. Environ. 2003, 11, 21–46. [Google Scholar]
- Mallot, H.A.; Gillner, S.; van Veen, H.A.; Bülthoff, H.H. Behavioral experiments in spatial cognition using virtual reality. In Spatial Cognition; Springer: Berlin/Heidelberg, Germany, 1998; pp. 447–467. [Google Scholar]
- Mohler, B.J.; Creem-Regehr, S.H.; Thompson, W.B. The influence of feedback on egocentric distance judgments in real and virtual environments. In Proceedings of the Symposium on Applied Perception in Graphics and Visualization, Boston, MA, USA, 28–29 July 2006; pp. 9–14. [Google Scholar]
- Renner, R.S.; Velichkovsky, B.M.; Helmert, J.R. The perception of egocentric distances in virtual environments-a review. ACM Comput. Surv. 2013, 46, 23. [Google Scholar] [CrossRef] [Green Version]
- Ruddle, R.A.; Volkova, E.; Bülthoff, H.H. Learning to walk in virtual reality. ACM Trans. Appl. Percept. 2013, 10, 11. [Google Scholar] [CrossRef] [Green Version]
- Willemsen, P.; Colton, M.B.; Creem-Regehr, S.H.; Thompson, W.B. The effects of head-mounted display mechanics on distance judgments in virtual environments. In Proceedings of the Symposium on Applied Perception in Graphics and Visualization, Los Angeles, CA, USA, 7–8 August 2004; pp. 35–38. [Google Scholar]
- Zanbaka, C.A.; Lok, B.C.; Babu, S.V.; Ulinski, A.C.; Hodges, L.F. Comparison of path visualizations and cognitive measures relative to travel technique in a virtual environment. IEEE Trans. Vis. Comput. Graph. 2005, 11, 694–705. [Google Scholar] [CrossRef]
- Koilias, A.; Mousas, C.; Anagnostopoulos, C.N. The effects of motion artifacts on self-avatar agency. Informatics 2019, 6, 18. [Google Scholar] [CrossRef] [Green Version]
- Loomis, J.M.; Blascovich, J.J.; Beall, A.C. Immersive virtual environment technology as a basic research tool in psychology. Behav. Res. Methods Instruments Comput. 1999, 31, 557–564. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.h.; Wade, M.G.; Stoffregen, T.A. Perceiving affordances for aperture passage in an environment–person–person system. J. Mot. Behav. 2009, 41, 495–500. [Google Scholar] [CrossRef]
- Simeone, A.L.; Mavridou, I.; Powell, W. Altering user movement behaviour in virtual environments. IEEE Trans. Vis. Comput. Graph. 2017, 23, 1312–1321. [Google Scholar] [CrossRef] [Green Version]
- Bruneau, J.; Olivier, A.H.; Pettre, J. Going through, going around: A study on individual avoidance of groups. IEEE Trans. Vis. Comput. Graph. 2015, 21, 520–528. [Google Scholar] [CrossRef] [Green Version]
- Mousas, C.; Koilias, A.; Anastasiou, D.; Rekabdar, B.; Anagnostopoulos, C.N. Effects of Self-Avatar and Gaze on Avoidance Movement Behavior. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Osaka, Japan, 23–27 March 2019; pp. 26–734. [Google Scholar]
- Olivier, A.H.; Bruneau, J.; Kulpa, R.; Pettré, J. Walking with virtual people: Evaluation of locomotion interfaces in dynamic environments. IEEE Trans. Vis. Comput. Graph. 2017, 24, 2251–2263. [Google Scholar] [CrossRef] [Green Version]
- Chartrand, T.L.; Van Baaren, R. Human mimicry. Adv. Exp. Soc. Psychol. 2009, 41, 219–274. [Google Scholar]
- Sebanz, N.; Bekkering, H.; Knoblich, G. Joint action: Bodies and minds moving together. Trends Cogn. Sci. 2006, 10, 70–76. [Google Scholar] [CrossRef]
- Fink, P.W.; Foo, P.S.; Warren, W.H. Obstacle avoidance during walking in real and virtual environments. ACM Trans. Appl. Percept. 2007, 4, 2. [Google Scholar] [CrossRef]
- Bartlett, R.; Button, C.; Robins, M.; Dutt-Mazumder, A.; Kennedy, G. Analysing team coordination patterns from player movement trajectories in soccer: Methodological considerations. Int. J. Perform. Anal. Sport 2012, 12, 398–424. [Google Scholar] [CrossRef]
- Davids, K.; Renshaw, I.; Glazier, P. Movement models from sports reveal fundamental insights into coordination processes. Exerc. Sport Sci. Rev. 2005, 33, 36–42. [Google Scholar]
- Lemercier, S.; Jelic, A.; Kulpa, R.; Hua, J.; Fehrenbach, J.; Degond, P.; Appert-Rolland, C.; Donikian, S.; Pettré, J. Realistic following behaviors for crowd simulation. Comput. Graph. Forum 2012, 31, 489–498. [Google Scholar] [CrossRef] [Green Version]
- Rio, K.W.; Rhea, C.K.; Warren, W.H. Follow the leader: Visual control of speed in pedestrian following. J. Vis. 2014, 14, 4. [Google Scholar] [CrossRef]
- Perrinet, J.; Olivier, A.H.; Pettré, J. Walk with me: Interactions in emotional walking situations, a pilot study. In Proceedings of the ACM Symposium on Applied Perception, Dublin, Ireland, 22–23 August 2013; pp. 59–66. [Google Scholar]
- Ducourant, T.; Vieilledent, S.; Kerlirzin, Y.; Berthoz, A. Timing and distance characteristics of interpersonal coordination during locomotion. Neurosci. Lett. 2005, 389, 6–11. [Google Scholar] [CrossRef]
- Karamouzas, I.; Overmars, M. Simulating the local behaviour of small pedestrian groups. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Hong Kong, China, 22–24 November 2010; pp. 183–190. [Google Scholar]
- De Vignemont, F.; Singer, T. The empathic brain: How, when and why? Trends Cogn. Sci. 2006, 10, 435–441. [Google Scholar] [CrossRef] [Green Version]
- Heyes, C. Automatic imitation. Psychol. Bull. 2011, 137, 463. [Google Scholar] [CrossRef]
- Keysers, C. Mirror neurons. Curr. Biol. 2009, 19, R971–R973. [Google Scholar] [CrossRef] [Green Version]
- Rizzolatti, G.; Craighero, L. The mirror-neuron system. Annu. Rev. Neurosci. 2004, 27, 169–192. [Google Scholar] [CrossRef] [Green Version]
- Rizzolatti, G.; Fadiga, L.; Gallese, V.; Fogassi, L. Premotor cortex and the recognition of motor actions. Cogn. Brain Res. 1996, 3, 131–141. [Google Scholar] [CrossRef]
- Rizzolatti, G.; Fadiga, L.; Fogassi, L.; Gallese, V. Resonance behaviors and mirror neurons. Arch. Ital. Biol. 1999, 137, 85–100. [Google Scholar]
- Brass, M.; Bekkering, H.; Prinz, W. Movement observation affects movement execution in a simple response task. Acta Psychol. 2001, 106, 3–22. [Google Scholar] [CrossRef]
- Lakin, J.L.; Chartrand, T.L. Using nonconscious behavioral mimicry to create affiliation and rapport. Psychol. Sci. 2003, 14, 334–339. [Google Scholar] [CrossRef]
- Kanakogi, Y.; Itakura, S. Developmental correspondence between action prediction and motor ability in early infancy. Nat. Commun. 2011, 2, 341. [Google Scholar] [CrossRef] [Green Version]
- Kilner, J.M.; Vargas, C.; Duval, S.; Blakemore, S.J.; Sirigu, A. Motor activation prior to observation of a predicted movement. Nat. Neurosci. 2004, 7, 1299. [Google Scholar] [CrossRef]
- Southgate, V.; Johnson, M.H.; Karoui, I.E.; Csibra, G. Motor system activation reveals infants’ on-line prediction of others’ goals. Psychol. Sci. 2010, 21, 355–359. [Google Scholar] [CrossRef]
- Pezzulo, G.; Donnarumma, F.; Dindo, H. Human sensorimotor communication: A theory of signaling in online social interactions. PLoS ONE 2013, 8, e79876. [Google Scholar] [CrossRef]
- Sacheli, L.M.; Tidoni, E.; Pavone, E.F.; Aglioti, S.M.; Candidi, M. Kinematics fingerprints of leader and follower role-taking during cooperative joint actions. Exp. Brain Res. 2013, 226, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Faria, J.J.; Krause, S.; Krause, J. Collective behavior in road crossing pedestrians: The role of social information. Behav. Ecol. 2010, 21, 1236–1242. [Google Scholar] [CrossRef] [Green Version]
- Guéguen, N.; Pichot, N. The influence of status on pedestrians’ failure to observe a road-safety rule. J. Soc. Psychol. 2001, 141, 413–415. [Google Scholar] [CrossRef]
- Lefkowitz, M.; Blake, R.R.; Mouton, J.S. Status factors in pedestrian violation of traffic signals. J. Abnorm. Soc. Psychol. 1955, 51, 704. [Google Scholar] [CrossRef]
- Babu, S.V.; Grechkin, T.Y.; Chihak, B.; Ziemer, C.; Kearney, J.K.; Cremer, J.F.; Plumert, J.M. An immersive virtual peer for studying social influences on child cyclists’ road-crossing behavior. IEEE Trans. Vis. Comput. Graph. 2010, 17, 14–25. [Google Scholar] [CrossRef]
- Jiang, Y.; O’Neal, E.; Rahimian, P.; Yon, J.P.; Plumert, J.M.; Kearney, J.K. Action coordination with agents: Crossing roads with a computer-generated character in a virtual environment. In Proceedings of the ACM Symposium on Applied Perception, Anaheim, CA, USA, 22–23 July 2016; pp. 57–64. [Google Scholar]
- Chihak, B.J.; Plumert, J.M.; Ziemer, C.J.; Babu, S.; Grechkin, T.; Cremer, J.F.; Kearney, J.K. Synchronizing self and object movement: How child and adult cyclists intercept moving gaps in a virtual environment. J. Exp. Psychol. Hum. Percept. Perform. 2010, 36, 1535. [Google Scholar] [CrossRef] [Green Version]
- Grechkin, T.Y.; Chihak, B.J.; Cremer, J.F.; Kearney, J.K.; Plumert, J.M. Perceiving and acting on complex affordances: How children and adults bicycle across two lanes of opposing traffic. J. Exp. Psychol. Hum. Percept. Perform. 2013, 39, 23. [Google Scholar] [CrossRef] [Green Version]
- Stevens, E.; Plumert, J.M.; Cremer, J.F.; Kearney, J.K. Preadolescent temperament and risky behavior: Bicycling across traffic-filled intersections in a virtual environment. J. Pediatr. Psychol. 2012, 38, 285–295. [Google Scholar] [CrossRef] [Green Version]
- Warren, W.H. Collective motion in human crowds. Curr. Dir. Psychol. Sci. 2018, 27, 232–240. [Google Scholar] [CrossRef]
- Rio, K.W.; Dachner, G.C.; Warren, W.H. Local interactions underlying collective motion in human crowds. Proc. R. Soc. Biol. Sci. 2018, 285, 20180611. [Google Scholar] [CrossRef] [Green Version]
- Bailenson, J.N.; Blascovich, J.; Beall, A.C.; Loomis, J.M. Interpersonal distance in immersive virtual environments. Personal. Soc. Psychol. Bull. 2003, 29, 819–833. [Google Scholar] [CrossRef] [Green Version]
- Wilcox, L.M.; Allison, R.S.; Elfassy, S.; Grelik, C. Personal space in virtual reality. ACM Trans. Appl. Percept. 2006, 3, 412–428. [Google Scholar] [CrossRef]
- Bailenson, J.N.; Blascovich, J.; Beall, A.C.; Loomis, J.M. Equilibrium theory revisited: Mutual gaze and personal space in virtual environments. Presence Teleoper. Virtual Environ. 2001, 10, 583–598. [Google Scholar] [CrossRef]
- Llobera, J.; Spanlang, B.; Ruffini, G.; Slater, M. Proxemics with multiple dynamic characters in an immersive virtual environment. ACM Trans. Appl. Percept. 2010, 8, 3. [Google Scholar] [CrossRef] [Green Version]
- Olivier, A.H.; Bruneau, J.; Cirio, G.; Pettré, J. A virtual reality platform to study crowd behaviors. Transp. Res. Procedia 2014, 2, 114–122. [Google Scholar] [CrossRef]
- Dickinson, P.; Gerling, K.; Hicks, K.; Murray, J.; Shearer, J.; Greenwood, J. Virtual reality crowd simulation: Effects of agent density on user experience and behaviour. Virtual Real. 2019, 23, 19–32. [Google Scholar] [CrossRef] [Green Version]
- Rıos, A.; Mateu, D.; Pelechano, N. Follower Behavior in a Virtual Environment. In Proceedings of the Virtual Humans and Crowds for Immersive Environments (VHCIE), Reutlingen, Germany, 19 March 2018. [Google Scholar]
- Nelson, M.; Koilias, A.; Gubbi, S.; Mousas, C. Within a Virtual Crowd: Exploring Human Movement Behavior during Immersive Crowd Interaction. In Proceedings of the ACM SIGGRAPH Conference on Virtual Reality Continuum and Its Applications in Industry, Brisbane, Australia, 14–16 November 2019. [Google Scholar]
- Berton, F.; Olivier, A.H.; Bruneau, J.; Hoyet, L.; Pettré, J. Studying Gaze Behaviour During Collision Avoidance With a Virtual Walker: Influence of the Virtual Reality Setup. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Osaka, Japan, 23–27 March 2019; pp. 717–725. [Google Scholar]
- Cirio, G.; Olivier, A.H.; Marchal, M.; Pettre, J. Kinematic evaluation of virtual walking trajectories. IEEE Trans. Vis. Comput. Graph. 2013, 19, 671–680. [Google Scholar] [CrossRef] [Green Version]
- Ahn, J.; Wang, N.; Thalmann, D.; Boulic, R. Within-crowd immersive evaluation of collision avoidance behaviors. In Proceedings of the ACM SIGGRAPH International Conference on Virtual-Reality Continuum and its Applications in Industry, Singapore, 2–4 December 2012; pp. 231–238. [Google Scholar]
- Kyriakou, M.; Pan, X.; Chrysanthou, Y. Interaction with virtual crowd in Immersive and semi-Immersive Virtual Reality systems. Comput. Animat. Virtual Worlds 2017, 28, e1729. [Google Scholar] [CrossRef]
- Pelechano, N.; Stocker, C.; Allbeck, J.; Badler, N. Being a part of the crowd: Towards validating VR crowds using presence. In Proceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems, Estoril, Portugal, 12–16 May 2008; pp. 136–142. [Google Scholar]
- Dupont, W.D.; Plummer, W.D., Jr. Power and sample size calculations for studies involving linear regression. Control. Clin. Trials 1998, 19, 589–601. [Google Scholar] [CrossRef]
- Rahimian, P.; O’Neal, E.E.; Yon, J.P.; Franzen, L.; Jiang, Y.; Plumert, J.M.; Kearney, J.K. Using a virtual environment to study the impact of sending traffic alerts to texting pedestrians. In Proceedings of the 2016 IEEE Virtual Reality (VR), Greenville, SC, USA, 19–23 March 2016; pp. 141–149. [Google Scholar]
- Still, G.K. Introduction to Crowd Science; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Souman, J.L.; Giordano, P.R.; Schwaiger, M.; Frissen, I.; Thümmel, T.; Ulbrich, H.; Luca, A.D.; Bülthoff, H.H.; Ernst, M.O. CyberWalk: Enabling unconstrained omnidirectional walking through virtual environments. ACM Trans. Appl. Percept. 2011, 8, 25. [Google Scholar] [CrossRef]
- Whitton, M.C.; Cohn, J.V.; Feasel, J.; Zimmons, P.; Razzaque, S.; Poulton, S.J.; McLeod, B.; Brooks, F.P. Comparing VE locomotion interfaces. In Proceedings of the IEEE Virtual Reality, Bonn, Germany, 12–16 March 2005; pp. 123–130. [Google Scholar]
- Hollman, J.H.; Brey, R.H.; Robb, R.A.; Bang, T.J.; Kaufman, K.R. Spatiotemporal gait deviations in a virtual reality environment. Gait Posture 2006, 23, 441–444. [Google Scholar] [CrossRef]
- Krogmeier, C.; Mousas, C.; Whittinghill, D. Human–virtual character interaction: Toward understanding the influence of haptic feedback. Comput. Animat. Virtual Worlds 2019, 30, e1183. [Google Scholar] [CrossRef]
- Pham, Q.C.; Hicheur, H.; Arechavaleta, G.; Laumond, J.P.; Berthoz, A. The formation of trajectories during goal-oriented locomotion in humans. II. A maximum smoothness model. Eur. J. Neurosci. 2007, 26, 2391–2403. [Google Scholar] [CrossRef]
- Hall, E.T. The Hidden Dimension; Doubleday: Garden City, NY, USA, 1910; Volume 609. [Google Scholar]
- Hickson, M.; Stacks, D.W.; Moore, N.J. Nonverbal Communication: Studies and Applications; Roxbury Pub.: Seberang Jaya, Malaysia, 2004. [Google Scholar]
- Federal Highway Administration. U.S. Manual on Uniform Traffic Control, Revisions 1 and 2 Incorporated Edition; U.S. Department of Transportation Federal Highway Administration: Washington, DC, USA, 2003.
- Nie, N.H.; Bent, D.H.; Hull, C.H. SPSS: Statistical Package for the Social Sciences; McGraw-Hill: New York, NY, USA, 1975; Volume 227. [Google Scholar]
- Ghasemi, A.; Zahediasl, S. Normality tests for statistical analysis: A guide for non-statisticians. Int. J. Endocrinol. Metab. 2012, 10, 486. [Google Scholar] [CrossRef] [Green Version]
- Koilias, A.; Nelson, M.G.; Anagnostopoulos, C.N.; Mousas, C. Immersive walking in a virtual crowd: The effects of the density, speed, and direction of a virtual crowd on human movement behavior. Comput. Animat. Virtual Worlds 2020, e1928. [Google Scholar] [CrossRef]
- Abernethy, B.; Burgess-Limerick, R.; Engstrom, C.; Hanna, A.; Neal, R.J. Temporal coordination of human gait. In Advances in Psychology; Elsevier: Amsterdam, The Netherlands, 1995; Volume 111, pp. 171–196. [Google Scholar]
- Fitts, P.M. The information capacity of the human motor system in controlling the amplitude of movement. J. Exp. Psychol. 1954, 47, 381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kelso, J. Phase transitions and critical behavior in human bimanual coordination. Am. J. Physiol. Regul. Integr. Comp. Physiol. 1984, 246, R1000–R1004. [Google Scholar] [CrossRef] [PubMed]
- Plamondon, R.; Feng, C.; Woch, A. A kinematic theory of rapid human movement. Part IV: A formal mathematical proof and new insights. Biol. Cybern. 2003, 89, 126–138. [Google Scholar] [CrossRef]
- Gibson, J.J. The Ecological Approach to Visual Perception: Classic Edition; Psychology Press: London, UK, 2014. [Google Scholar]
- Watanabe, K. Behavioral speed contagion: Automatic modulation of movement timing by observation of body movements. Cognition 2008, 106, 1514–1524. [Google Scholar] [CrossRef]
- Blake, R.; Shiffrar, M. Perception of human motion. Annu. Rev. Psychol. 2007, 58, 47–73. [Google Scholar] [CrossRef] [Green Version]
- Cutting, J.E.; Kozlowski, L.T. Recognizing friends by their walk: Gait perception without familiarity cues. Bull. Psychon. Soc. 1977, 9, 353–356. [Google Scholar] [CrossRef]
- Troje, N.F.; Westhoff, C.; Lavrov, M. Person identification from biological motion: Effects of structural and kinematic cues. Percept. Psychophys. 2005, 67, 667–675. [Google Scholar] [CrossRef]
- Vanrie, J.; Verfaillie, K. Perception of biological motion: A stimulus set of human point-light actions. Behav. Res. Methods Instruments Comput. 2004, 36, 625–629. [Google Scholar] [CrossRef] [Green Version]
- Adams, J.A. Feedback theory of how joint receptors regulate the timing and positioning of a limb. Psychol. Rev. 1977, 84, 504. [Google Scholar] [CrossRef]
- Mohler, B.J.; Thompson, W.B.; Creem-Regehr, S.H.; Pick, H.L.; Warren, W.H. Visual flow influences gait transition speed and preferred walking speed. Exp. Brain Res. 2007, 181, 221–228. [Google Scholar] [CrossRef]
- Mousas, C.; Kao, D.; Koilias, A.; Rekabdar, B. Real and Virtual Environment Mismatching Induces Arousal and Alters Movement Behavior. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Atlanta, GA, USA, 22–26 March 2020. [Google Scholar]
- Bera, A.; Kim, S.; Manocha, D. Efficient trajectory extraction and parameter learning for data-driven crowd simulation. In Proceedings of the Graphics Interface Conference, Halifax, NS, Canada, 3–5 June 2015; pp. 65–72. [Google Scholar]
- Charalambous, P.; Chrysanthou, Y. The pag crowd: A graph based approach for efficient data-driven crowd simulation. Comput. Graph. Forum 2014, 33, 95–108. [Google Scholar] [CrossRef]
- Lee, K.H.; Choi, M.G.; Hong, Q.; Lee, J. Group behavior from video: A data-driven approach to crowd simulation. In Proceedings of the ACM SIGGRAPH/Eurographics symposium on Computer Animation, San Diego, CA, USA, 2–4 August 2007; pp. 109–118. [Google Scholar]
- Mousas, C.; Anastasiou, D.; Spantidi, O. The effects of appearance and motion of virtual characters on emotional reactivity. Comput. Hum. Behav. 2018, 86, 99–108. [Google Scholar] [CrossRef]
- Koilias, A.; Mousas, C.; Anagnostopoulos, C.N. I Feel a Moving Crowd Surrounds Me: Exploring Tactile Feedback during Immersive Walking in a Virtual Crowd. In Computer Animation and Virtual Worlds; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2020. [Google Scholar]
- Krogmeier, C.; Mousas, C. Eye Fixations and Electrodermal Activity During Low-Budget Virtual Reality Embodiment. In Computer Animation and Virtual Worlds; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2020. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| B | SE B | β | t | p | |
|---|---|---|---|---|---|
| Speed | 1.146 | 0.205 | 0.535 | 5.593 | 0.001 |
| Time | 1.106 | 0.180 | 0.570 | 6.134 | 0.001 |
| Length | −0.148 | 0.234 | −0.071 | −0.630 | 0.531 |
| Direction | 0.743 | 0.102 | 0.636 | 7.275 | 0.001 |
| Smoothness | 0.176 | 0.099 | 0.196 | 1.769 | 0.081 |
| Distance from nearby pedestrians | 0.674 | 0.098 | 0.599 | 6.606 | 0.001 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koilias, A.; Nelson, M.; Gubbi, S.; Mousas, C.; Anagnostopoulos, C.-N. Evaluating Human Movement Coordination During Immersive Walking in a Virtual Crowd. Behav. Sci. 2020, 10, 130. https://0-doi-org.brum.beds.ac.uk/10.3390/bs10090130
Koilias A, Nelson M, Gubbi S, Mousas C, Anagnostopoulos C-N. Evaluating Human Movement Coordination During Immersive Walking in a Virtual Crowd. Behavioral Sciences. 2020; 10(9):130. https://0-doi-org.brum.beds.ac.uk/10.3390/bs10090130
Chicago/Turabian StyleKoilias, Alexandros, Michael Nelson, Sahana Gubbi, Christos Mousas, and Christos-Nikolaos Anagnostopoulos. 2020. "Evaluating Human Movement Coordination During Immersive Walking in a Virtual Crowd" Behavioral Sciences 10, no. 9: 130. https://0-doi-org.brum.beds.ac.uk/10.3390/bs10090130