Framework for Validation of Permanently Installed MEMS-Based Acquisition Devices Using Soft Sensor Models

 , , , , and
, , , , and
Abstract
:1. Introduction
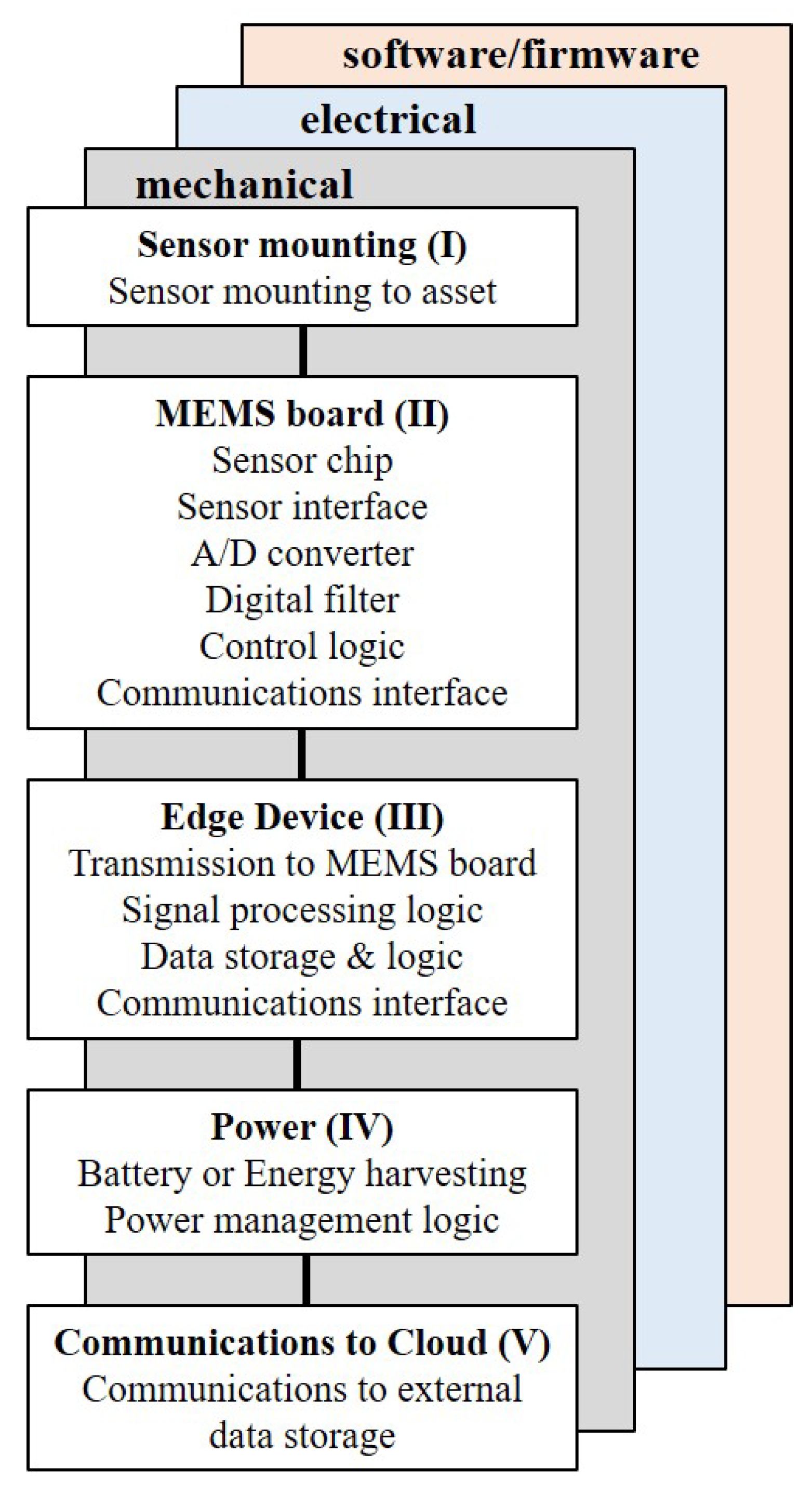
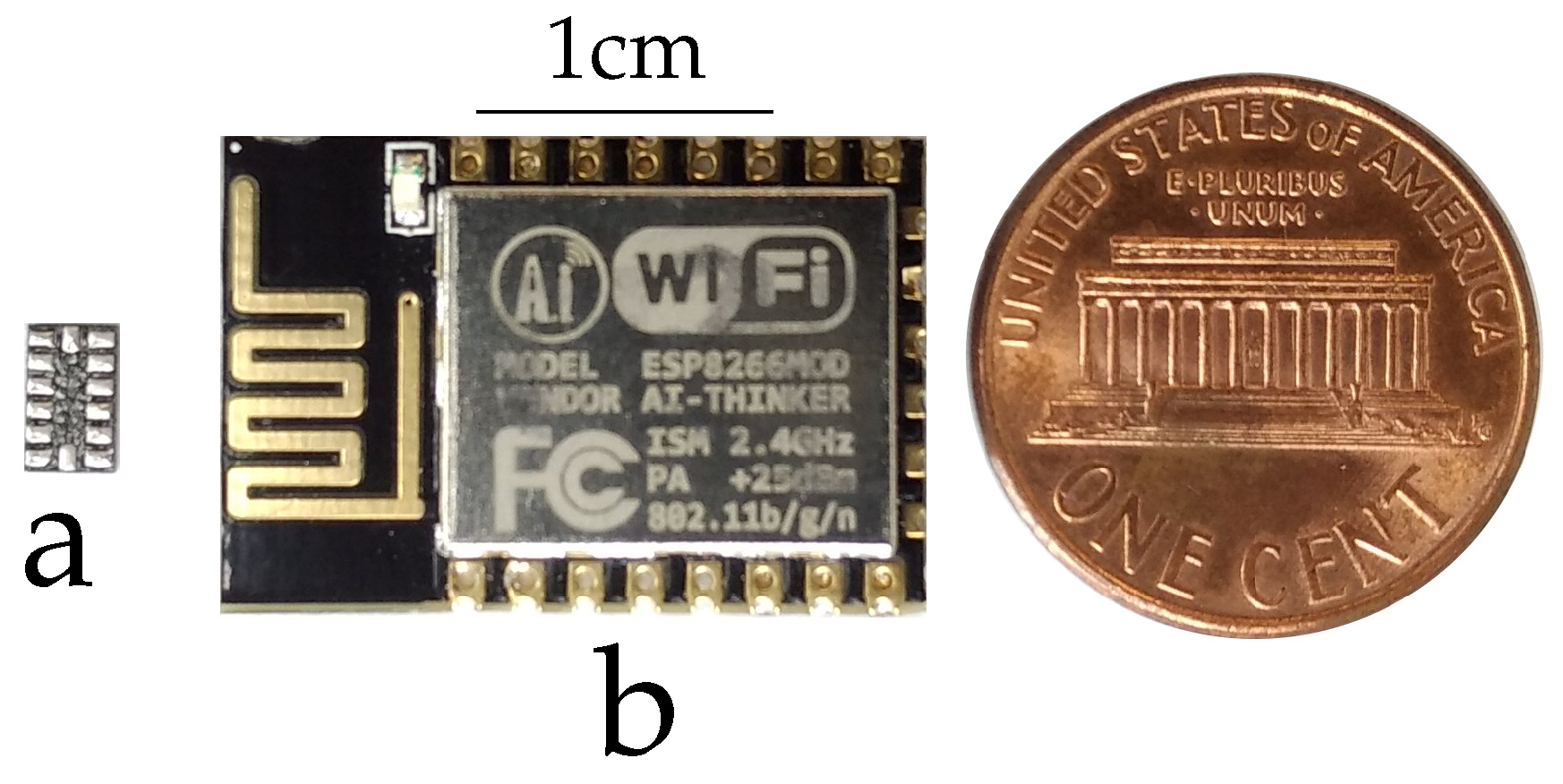
2. MEMS-Based Sensing Systems
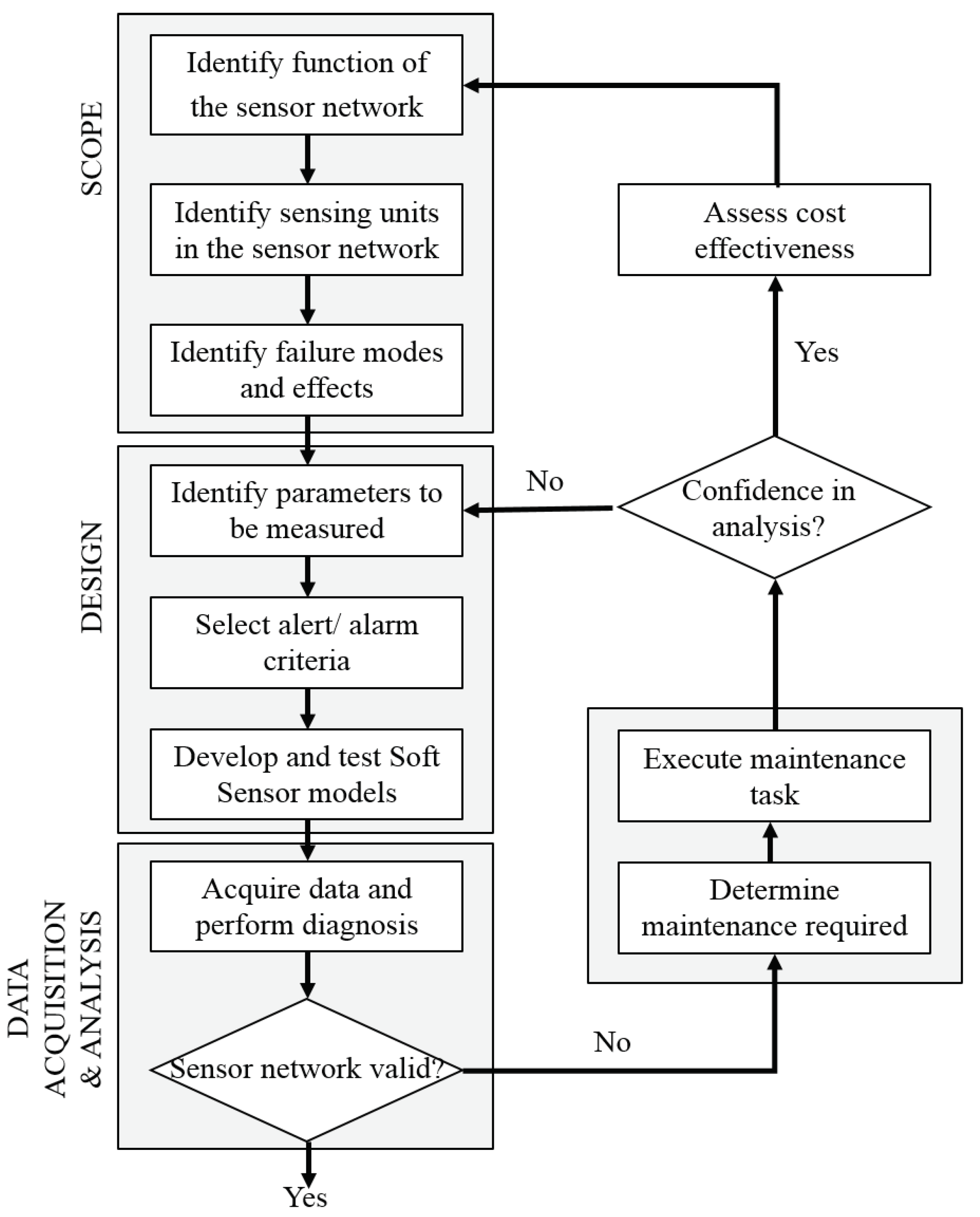
3. Scope of the Management System
4. Validation System Design
4.1. Soft Sensor Models
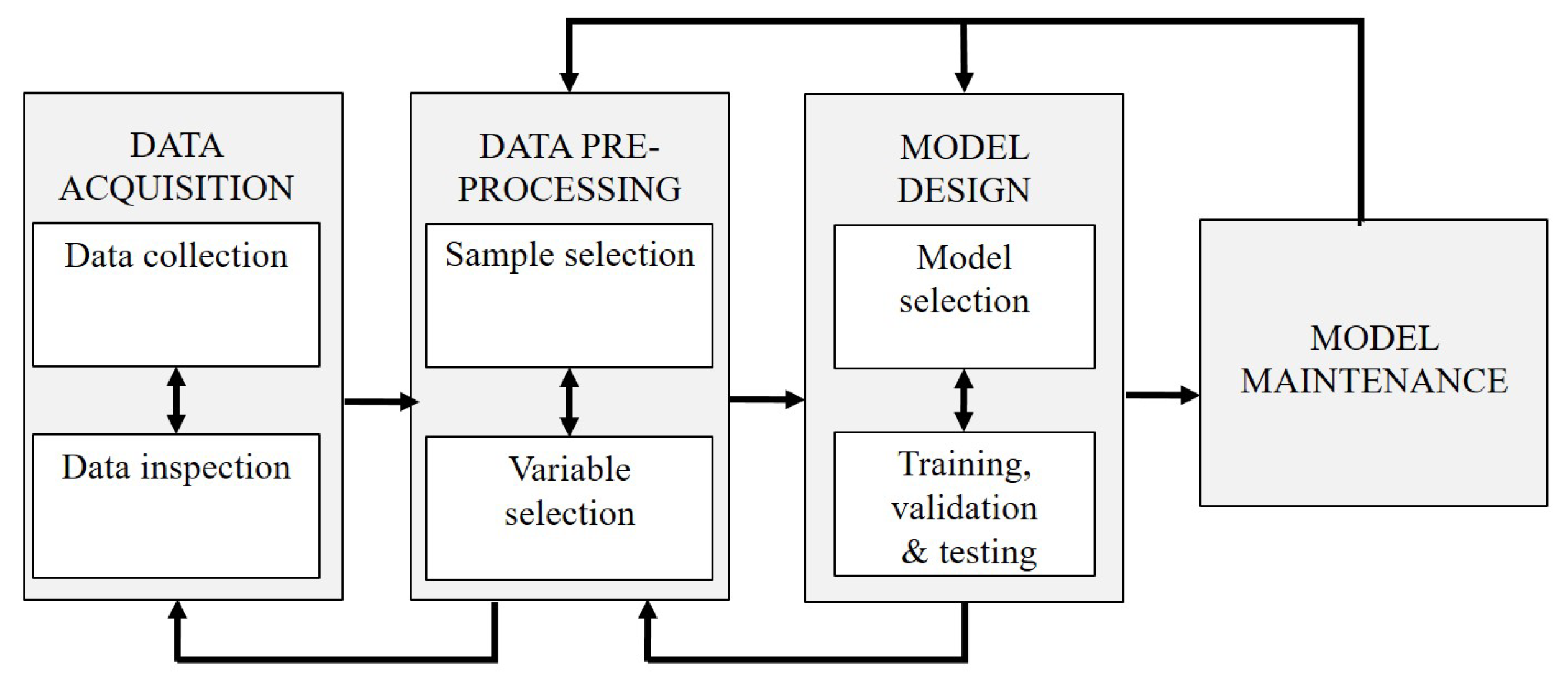
4.2. Model Development Process
4.3. Maintenance of the Validation System
4.4. Confidence in the Analysis
4.5. Cost Effectiveness
5. Evolution of Soft Sensor Models for Sensing Node Validation
6. Lessons Learned
7. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- BSI. BS ISO 17359:2018 Condition Monitoring and Diagnostics of Machines; General Guidelines; BSI: London, UK, 2018. [Google Scholar]
- Karbhari, V.M.; Ansari, F. Structural Health Monitoring of Civil Infrastructure Systems; Woodhead Publishing: Cambridge, UK, 2009. [Google Scholar]
- EPRI. On-Line Monitoring Cost-Benefit Guide. EPRI Report 1006777; Technical Report; Electric Power Research Institute: Palo Alto, CA, USA, 2003. [Google Scholar]
- Cheng, S.; Azarian, M.H.; Pecht, M.G. Sensor systems for prognostics and health management. Sensors 2010, 10, 5774–5797. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- ISO. ISO 13373-1:2002 Condition Monitoring and Diagnostics of Machines: Vibration Condition Monitoring—Part 1: General Procedures; ISO: Geneva, Switzerland, 2002. [Google Scholar]
- BSI. BS EN ISO 19902:2007 Petroleum and Natural Gas Industries; Fixed Steel Offshore Structures; ISO: London, UK, 2008. [Google Scholar]
- Kullaa, J. Virtual sensing of structural vibrations using dynamic substructuring. Mech. Syst. Signal Process. 2016, 79, 203–224. [Google Scholar] [CrossRef]
- Hernandez-Garcia, M.R.; Masri, S.F. Application of statistical monitoring using latent-variable techniques for detection of faults in sensor networks. J. Intell. Mater. Syst. Struct. 2014, 25, 121–136. [Google Scholar] [CrossRef]
- Huang, Y.; Vasan, A.S.S.; Doraiswami, R.; Osterman, M.; Pecht, M. MEMS reliability review. IEEE Trans. Device Mater. Reliab. 2012, 12, 482–493. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Jiang, Z. An overview of reliability and failure mode analysis of microelectromechanical systems (MEMS). In Handbook of Performability Engineering; Springer: Berlin, Germany, 2008; pp. 953–966. [Google Scholar]
- Syed, Z.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A new multi-position calibration method for MEMS inertial navigation systems. Meas. Sci. Technol. 2007, 18, 1897. [Google Scholar] [CrossRef]
- Ompusunggu, A.P.; Bey-Temsamani, A. 2-Level error (drift) compensation for low-cost MEMS-based inertial measurement unit (IMU). Microsyst. Technol. 2016, 22, 1601–1612. [Google Scholar] [CrossRef]
- Aggarwal, P.; Syed, Z.; Niu, X.; El-Sheimy, N. Cost-effective testing and calibration of low cost MEMS sensors for integrated positioning, navigation and mapping systems. In Proceedings of the XXIII FIG Congress, Munich, Germany, 8–13 October 2006. [Google Scholar]
- Dai, G.; Li, M.; He, X.; Du, L.; Shao, B.; Su, W. Thermal drift analysis using a multiphysics model of bulk silicon MEMS capacitive accelerometer. Sensors Actuators A Phys. 2011, 172, 369–378. [Google Scholar] [CrossRef]
- Fonseca, D.J.; Sequera, M. On MEMS reliability and failure mechanisms. Int. J. Qual. Stat. Reliab. 2011, 2011. [Google Scholar] [CrossRef]
- Federici, F.; Alesii, R.; Colarieti, A.; Graziosi, F.; Faccio, M. Design and validation of a wireless sensor node for long term structural health monitoring. In Proceedings of the 2013 IEEE Sensors, Baltimore, MD, USA, 3–6 November; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Ha, D.W.; Park, H.S.; Choi, S.W.; Kim, Y. A wireless MEMS-based inclinometer sensor node for structural health monitoring. Sensors 2013, 13, 16090–16104. [Google Scholar] [CrossRef] [Green Version]
- Kano, M.; Nakagawa, Y. Data-based process monitoring, process control, and quality improvement: Recent developments and applications in steel industry. Comput. Chem. Eng. 2008, 32, 12–24. [Google Scholar] [CrossRef] [Green Version]
- Lin, B.; Recke, B.; Knudsen, J.K.; Jørgensen, S.B. A systematic approach for soft sensor development. Comput. Chem. Eng. 2007, 31, 419–425. [Google Scholar] [CrossRef]
- Kano, M.; Fujiwara, K. Virtual sensing technology in process industries: Trends and challenges revealed by recent industrial applications. J. Chem. Eng. Jpn. 2013, 46, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Tham, M.T.; Montague, G.A.; Morris, A.J.; Lant, P.A. Soft-sensors for process estimation and inferential control. J. Process Control 1991, 1, 3–14. [Google Scholar] [CrossRef]
- Fortuna, L.; Graziani, S.; Rizzo, A.; Xibilia, M.G. Soft Sensors for Monitoring and Control of Industrial Processes; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Kerschen, G.; De Boe, P.; Golinval, J.C.; Worden, K. Sensor validation using principal component analysis. Smart Mater. Struct. 2004, 14, 36. [Google Scholar] [CrossRef]
- Garvey, J.; Garvey, D.; Seibert, R.; Hines, J. Nuclear power plant on-line sensor calibration monitoring implementation issues. Int. J. Nucl. Knowl. Manag. 2007, 2, 204–223. [Google Scholar] [CrossRef]
- Nair, A.M. Bayesian framework for high confidence signal validation for online monitoring systems in nuclear power plants. Master’s Thesis, University of Tennessee, Knoxville, TN, USA, 2016. [Google Scholar]
- Ray, A.; Desai, M. A calibration and estimation filter for multiply redundant measurement systems. ASME J. Dyn. Syst. Meas. Control 1984, 106, 149–156. [Google Scholar] [CrossRef]
- Haimi, H.; Mulas, M.; Corona, F.; Vahala, R. Data-derived soft-sensors for biological wastewater treatment plants: An overview. Environ. Model. Softw. 2013, 47, 88–107. [Google Scholar] [CrossRef]
- Khatibisepehr, S. Bayesian Solutions to Multi-Model Inferential Sensing Problems. Ph.D. Thesis, University of Alberta, Edmonton, AB, Canada, 2013. [Google Scholar]
- Grbić, R.; Kurtagić, D.; Slišković, D. Stream water temperature prediction based on Gaussian process regression. Expert Syst. Appl. 2013, 40, 7407–7414. [Google Scholar] [CrossRef]
- Ramuhalli, P.; Lin, G.; Crawford, S.; Konomi, B.; Coble, J.; Shumaker, B.; Hashemian, H. Uncertainty Quantification Techniques for Sensor Calibration Monitoring in Nuclear Power Plants; Technical Report; Pacific Northwest National Laboratory: Richland, WA, USA, 2014. [Google Scholar]
- Hines, J.W. Improved methods for on-line sensor calibration verification. In Proceedings of the ICONE 88th International Conference on Nuclear Engineering, Baltimore, MD, USA, 2–6 April 2000. [Google Scholar]
- Grbić, R.; Slišković, D.; Kadlec, P. Adaptive soft sensor for online prediction and process monitoring based on a mixture of Gaussian process models. Comput. Chem. Eng. 2013, 58, 84–97. [Google Scholar] [CrossRef]
- Kadlec, P.; Gabrys, B.; Strandt, S. Data-driven Soft Sensors in the process industry. Comput. Chem. Eng. 2009, 33, 795–814. [Google Scholar] [CrossRef] [Green Version]
- Khatibisepehr, S.; Huang, B. A Bayesian approach to robust process identification with ARX models. AIChE J. 2013, 59, 845–859. [Google Scholar] [CrossRef]
- Khatibisepehr, S.; Huang, B.; Xu, F.; Espejo, A. A Bayesian approach to design of adaptive multi-model inferential sensors with application in oil sand industry. J. Process Control 2012, 22, 1913–1929. [Google Scholar] [CrossRef]
- Lu, B.; Chiang, L. Semi-supervised online soft sensor maintenance experiences in the chemical industry. J. Process Control 2018, 67, 23–34. [Google Scholar] [CrossRef]
- Campbell, J.D.; Reyes-Picknell, J.V. Uptime: Strategies for Excellence in Maintenance Management; CRC Press: Cleveland, OH, USA, 2015. [Google Scholar]
- Kelly, A. Maintenance Systems and Documentation; Butterworth-Heinemann: Oxford, UK, 2006. [Google Scholar]
- Molina, R.; Unsworth, K.; Hodkiewicz, M.; Adriasola, E. Are managerial pressure, technological control and intrinsic motivation effective in improving data quality? Reliab. Eng. Syst. Saf. 2013, 119, 26–34. [Google Scholar] [CrossRef]
- Unsworth, K.; Adriasola, E.; Johnston-Billings, A.; Dmitrieva, A.; Hodkiewicz, M. Goal hierarchy: Improving asset data quality by improving motivation. Reliab. Eng. Syst. Saf. 2011, 96, 1474–1481. [Google Scholar] [CrossRef]
- EPRI. On-Line Monitoring of Instrument Channel Performance: TR-104965-R1 NRC SER; Technical Report; Electric Power Research Institute: Palo Alto, CA, USA, 2000. [Google Scholar]
- Venkatasubramanian, V.; Rengaswamy, R.; Yin, K.; Kavuri, S.N. A review of process fault detection and diagnosis: Part I: Quantitative model-based methods. Comput. Chem. Eng. 2003, 27, 293–311. [Google Scholar] [CrossRef]
- Hines, J. On-Line Monitoring for Calibration Extension: An Overview and Introduction; Technical Report; University of Tennessee: Knoxville, TN, USA, 2008. [Google Scholar]
- Coble, J.; Ramuhalli, P.; Meyer, R.; Hashemian, H.; Shumaker, B.; Cummins, D. Calibration monitoring for sensor calibration interval extension: Identifying technical gaps. In Proceedings of the 2012 Future of Instrumentation International Workshop (FIIW) Proceedings, Gatlinburg, TN, USA, 8–9 October 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Hashemian, H.M.; Bean, W.C. State-of-the-Art Predictive Maintenance Techniques. IEEE Trans. Instrum. Meas. 2011, 60, 3480–3492. [Google Scholar] [CrossRef]
- Coble, J.; Meyer, R.; Ramuhalli, P.; Bond, L.; Hashemian, H.; Schumaker, B.; Cummins, D. A Review of Sensor Calibration Monitoring for Calibration Interval Extension in Nuclear Power Plants; Technical Report; Pacific Northwest National Laboratory: Richland, WA, USA, 2012. [Google Scholar]
- Qin, S.J.; Yue, H.; Dunia, R. Self-validating inferential sensors with application to air emission monitoring. Ind. Eng. Chem. Res. 1997, 36, 1675–1685. [Google Scholar] [CrossRef]
- Dunia, R.; Qin, S.J. Joint diagnosis of process and sensor faults using principal component analysis. Control Eng. Pract. 1998, 6, 457–469. [Google Scholar] [CrossRef]
- Alag, S.; Agogino, A.M.; Morjaria, M. A methodology for intelligent sensor measurement, validation, fusion, and fault detection for equipment monitoring and diagnostics. AI EDAM 2001, 15, 307–320. [Google Scholar] [CrossRef] [Green Version]
- Kamohara, H.; Takinami, A.; Takeda, M.; Kano, M.; Hasebe, S.; Hashimoto, I. Product quality estimation and operating condition monitoring for industrial ethylene fractionator. J. Chem. Eng. Jpn. 2004, 37, 422–428. [Google Scholar] [CrossRef]
- Wang, S.; Xiao, F. AHU sensor fault diagnosis using principal component analysis method. Energy Build. 2004, 36, 147–160. [Google Scholar] [CrossRef]
- Shengwei, W.; Xiao, F. Sensor fault detection and diagnosis of air-handling units using a condition-based adaptive statistical method. HVAC&R Res. 2006, 12, 127–150. [Google Scholar]
- Wang, S.; Cui, J. Sensor-fault detection, diagnosis and estimation for centrifugal chiller systems using principal-component analysis method. Appl. Energy 2005, 82, 197–213. [Google Scholar] [CrossRef]
- Abdelghani, M.; Friswell, M.I. Sensor validation for structural systems with multiplicative sensor faults. Mech. Syst. Signal Process. 2007, 21, 270–279. [Google Scholar] [CrossRef]
- Kaneko, H.; Arakawa, M.; Funatsu, K. Development of a new soft sensor method using independent component analysis and partial least squares. AIChE J. 2009, 55, 87–98. [Google Scholar] [CrossRef]
- Liu, J.; Chen, D.S.; Shen, J.F. Development of self-validating soft sensors using fast moving window partial least squares. Ind. Eng. Chem. Res. 2010, 49, 11530–11546. [Google Scholar] [CrossRef]
- Kullaa, J. Sensor validation using minimum mean square error estimation. Mech. Syst. Signal Process. 2010, 24, 1444–1457. [Google Scholar] [CrossRef]
- Kullaa, J. Detection, identification, and quantification of sensor fault in a sensor network. Mech. Syst. Signal Process. 2013, 40, 208–221. [Google Scholar] [CrossRef]
- Kullaa, J. Distinguishing between sensor fault, structural damage, and environmental or operational effects in structural health monitoring. Mech. Syst. Signal Process. 2011, 25, 2976–2989. [Google Scholar] [CrossRef]
- Rao, A.R.M.; Kasireddy, V.; Gopalakrishnan, N.; Lakshmi, K. Sensor fault detection in structural health monitoring using null subspace–based approach. J. Intell. Mater. Syst. Struct. 2015, 26, 172–185. [Google Scholar] [CrossRef]
- Huand, H.B.; Yi, T.H.; Li, H.N. Bayesian combination of weighted principal-component analysis for diagnosing sensor faults in structural monitoring systems. J. Eng. Mech. 2017, 143, 1–16. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Author & Year | Approach | Field | Industry Sector |
|---|---|---|---|
| Ray, 1984 [27] | Adaptive filter | Process variables (11) | Operating nuclear reactor |
| Qin, 1997 & Dunia, 1998 [48,49] | PCA | Process variables (8) | Industrial boiler |
| Alag, 2000 [50] | Fuzzy-neural network | Process variables (NA) | Gas turbine |
| Kamohara, 2004 [51] | PLS | Process variables (18) | Ethylene plant |
| Wang, 2004 & 2006 [52,53] | PCA | Process variables (8) | Air handling unit |
| Wang, 2005 [54] | PCA | Process variables (8) | Centrifugal chiller |
| Fortuna, 2007 [23] | Neural network | Strain gauges (32) | Experimental fusion reactor |
| Abdelghani, 2007 [55] | Modal residuals | Piezo accelerometers (28) | Lab steel subframe |
| Kaneko, 2009 [56] | PLS & ICA | Process variables (19) | Distillation column |
| Liu, 2010 [57] | PLS with moving window | Process variables (18) | Air separation process |
| Kulaa, 2010-2013 [58,59,60] | MMSE & Gaussian process | Piezo accelerometers (15) | Lab-scale Wooden bridge |
| Hernandez-Garcia, 2014 [9] | PCA & ICA | Piezo accelerometers (15) | Cable suspension bridge |
| Rao, 2015 [61] | Null subspace | MEMS accelerometers (20) | Lab-scale concrete bridge |
| Huang, 2017 [62] | Bayesian inference and PCA | Piezo accelerometers (16) | Lab-scale benchmark model |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bartels, A.; Cripps, E.; Keating, A.; Milne, I.; Travaglione, B.; Hodkiewicz, M. Framework for Validation of Permanently Installed MEMS-Based Acquisition Devices Using Soft Sensor Models. CivilEng 2020, 1, 93-105. https://0-doi-org.brum.beds.ac.uk/10.3390/civileng1020007
Bartels A, Cripps E, Keating A, Milne I, Travaglione B, Hodkiewicz M. Framework for Validation of Permanently Installed MEMS-Based Acquisition Devices Using Soft Sensor Models. CivilEng. 2020; 1(2):93-105. https://0-doi-org.brum.beds.ac.uk/10.3390/civileng1020007
Chicago/Turabian StyleBartels, Alain, Edward Cripps, Adrian Keating, Ian Milne, Ben Travaglione, and Melinda Hodkiewicz. 2020. "Framework for Validation of Permanently Installed MEMS-Based Acquisition Devices Using Soft Sensor Models" CivilEng 1, no. 2: 93-105. https://0-doi-org.brum.beds.ac.uk/10.3390/civileng1020007