
Theoretical and Experimental Study of a Thermo-Mechanical Model of a Shape Memory Alloy Actuator Considering Minor Hystereses



Abstract
:1. Introduction
2. Design Concept of the SMA Actuator
3. Development of One-Dimensional Dynamic Model of the Actuator
3.1. Mathematical Modelling of the SMA Actuator Dynamics
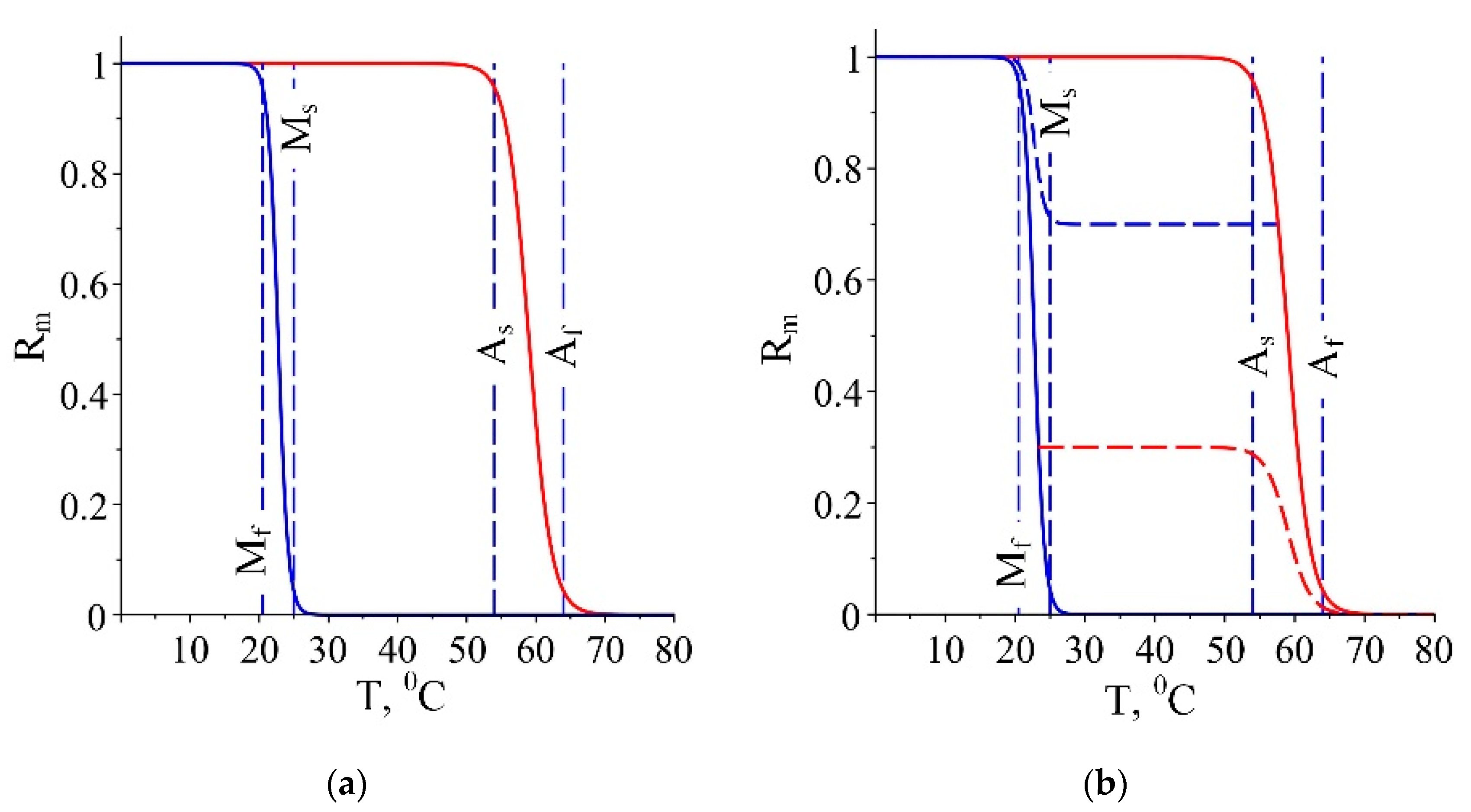
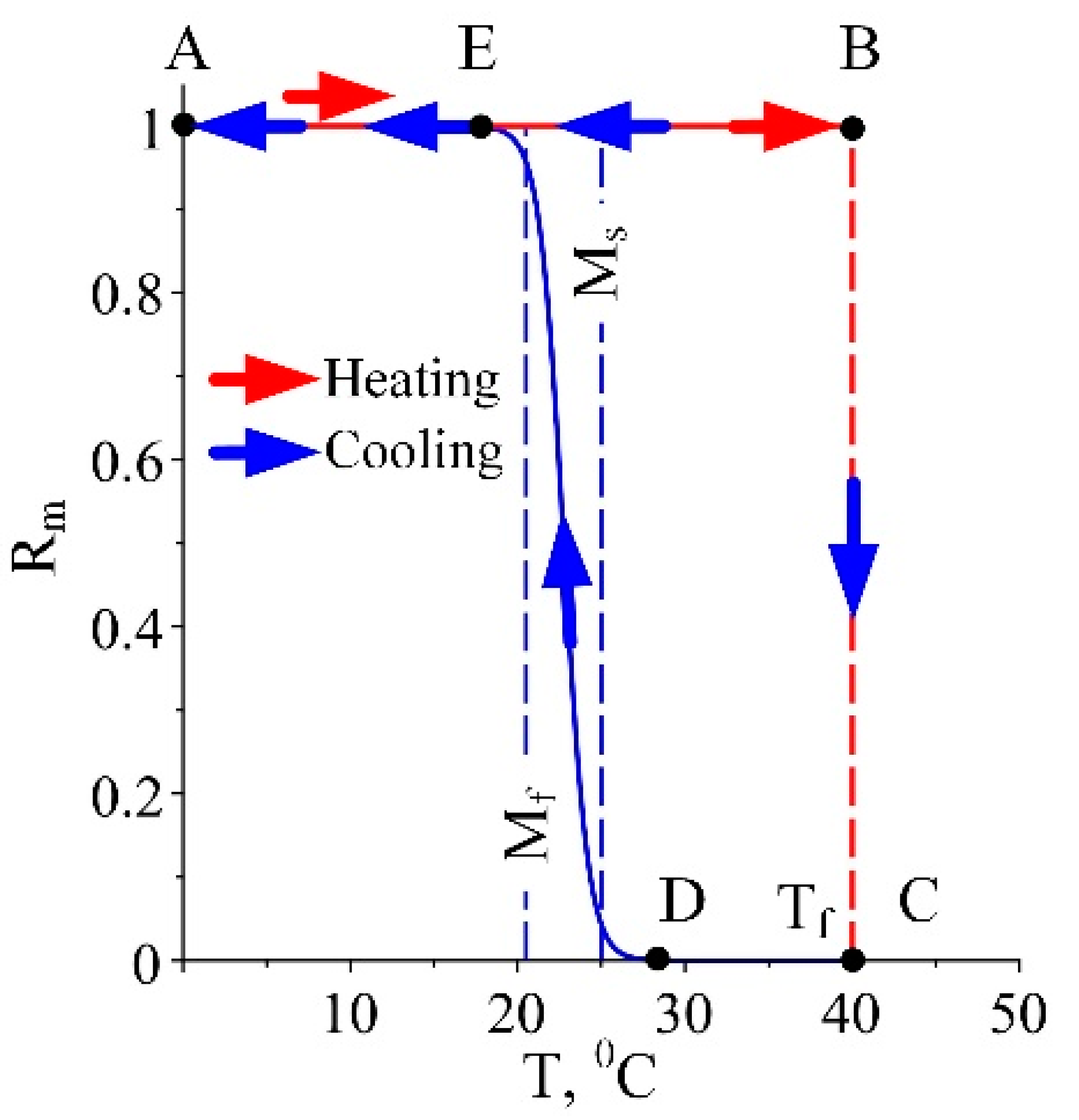
3.2. Mathematical Modelling of the Minor and Sub Minor Hystereses
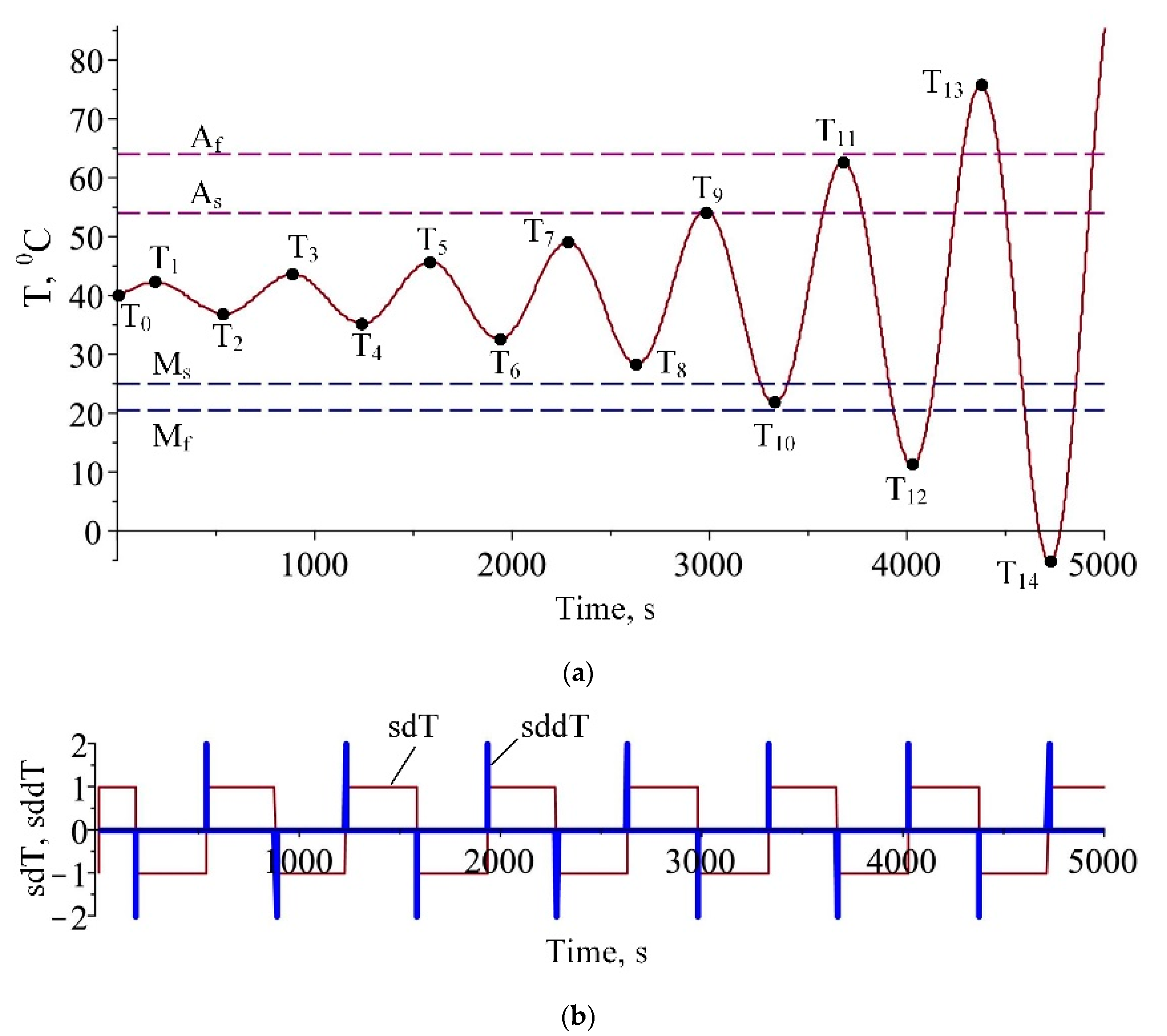
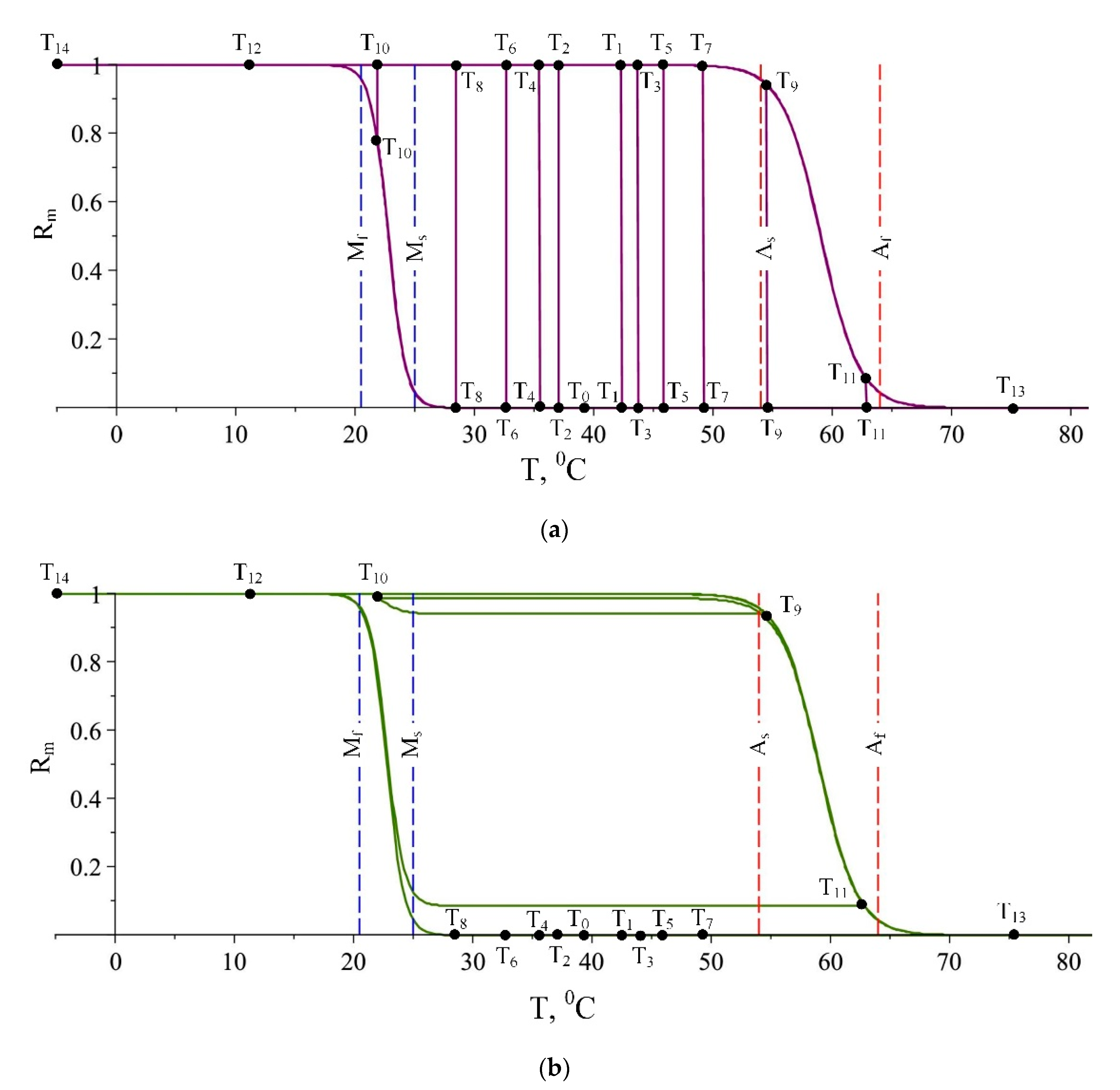
4. Numerical Study of the System Behaviour Using Pulse Width Modulation Control
5. Experimental Studies and Validation of the Model
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Todorov, T.; Mitrev, R.; Penev, I. Force analysis and kinematic optimization of a fluid valve driven by shape memory alloys. Rep. Mech. Eng. 2020, 1, 61–76. [Google Scholar] [CrossRef]
- Petrini, L.; Migliavacca, F. Biomedical Applications of Shape Memory Alloys. J. Metall. 2011, 2011, 501483. [Google Scholar] [CrossRef]
- Anjum, N.; He, J.; Ain, Q.; Tian, D. Li-He’s modified homotopy perturbation method for doubly-clamped electrically actuated microbeams-based microelectromechanical system. Facta Univ.-Ser. Mech. Eng. 2021, in press. [Google Scholar] [CrossRef]
- Noll, M.-U.; Lentz, L.; von Wagner, U. On the discretization of a bistable cantilever beam with application to energy harvesting. Facta Univ.-Ser. Mech. Eng. 2019, 17, 125–139. [Google Scholar] [CrossRef]
- Marinković, D.; Rama, G.; Zehn, M. Abaqus implementation of a corotational piezoelectric 3-node shell element with drilling degree of freedom. Facta Univ.-Ser. Mech. Eng. 2019, 17, 269–283. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, K.A. Thermomechanical sketch of shape memory effect: One-dimensional tensile behavior. Res. Mech. 1986, 18, 251–263. [Google Scholar]
- Liang, C.; Rogers, C.A. One-dimensional thermomechanical constitutive relations for shape memory material. J. Intell. Mater. Syst. Struct. 1990, 1, 207–234. [Google Scholar] [CrossRef]
- Brinson, L.C. One dimensional constitutive behavior of shape memory alloys: Thermomechanical derivation with nonconstant material functions and redefined martensite internal variable. J. Intell. Mater. Syst. Struct. 1993, 4, 229–242. [Google Scholar] [CrossRef]
- Sayyaadi, H.; Zakerzadeh, M.R.; Salehi, H. A comparative analysis of some one-dimensional shape memory alloy constitutive models based on experimental tests. Sci. Iran. 2012, 19, 249–257. [Google Scholar] [CrossRef] [Green Version]
- Achenbach, M. A model for an alloy with shape memory. Int. J. Plast. 1989, 5, 371–395. [Google Scholar] [CrossRef]
- Seelecke, S.; Müller, I. Shape memory alloy actuators in smart structures: Modeling and simulation. Appl. Mech. Rev. 2004, 57, 23–46. [Google Scholar] [CrossRef]
- Roh, J.-H. Thermomechanical Modeling of Shape Memory Alloys with Rate Dependency on the Pseudoelastic Behavior. Math. Probl. Eng. 2014, 2014, 204165. [Google Scholar] [CrossRef]
- Kurzawa, M.; Stachowiak, D. Investigation on thermo-mechanical behavior of shape memory alloy actuator. Arch. Electr. Eng. 2017, 66, 751–760. [Google Scholar] [CrossRef]
- Sedlák, P.; Frost, M.; Benešová, B.; Ben Zineb, T.; Šittner, P. Thermomechanical model for NiTi-based shape memory alloys including R-phase and material anisotropy under multi-axial loadings. Int. J. Plast. 2012, 39, 132–151. [Google Scholar] [CrossRef]
- Tanaka, K.; Nishimura, F.; Tobushi, H. Phenomenological Analysis on Subloops in Shape Memory Alloys Due to Incomplete Transformations. J. Intell. Mater. Syst. Struct. 1994, 5, 487–493. [Google Scholar] [CrossRef]
- Segui, C.; Cesari, E.; Pons, J. Phenomenological modelling of the hysteresis loop in thermoelastic martensitic transformations. Mater. Trans. 1992, 33, 650–658. [Google Scholar]
- Liu, M.; Hao, L.; Zhang, W.; Zhao, Z. A novel design of shape-memory alloy-based soft robotic gripper with variable stiffness. Int. J. Adv. Robot. Syst. 2020, 17, 172988142090781. [Google Scholar] [CrossRef]
- Manfredi, L.; Huan, Y.; Cuschieri, A. Low power consumption mini rotary actuator with SMA wires. Smart Mater. Struct. 2017, 26, 115003. [Google Scholar] [CrossRef]
- Abuzied, H.; Abbas, A.; Awad, M.; Senbel, H. Usage of shape memory alloy actuators for large force active disassembly applications. Heliyon 2020, 6, e04611. [Google Scholar] [CrossRef]
- Chaitanya, S.K.; Dhanalakshmi, K. Control of Shape Memory Alloy Actuated Gripper using Pulse-Width Modulation. IFAC Proc. Vol. 2014, 47, 408–413. [Google Scholar] [CrossRef]
- Soother, D.K.; Daudpoto, J.; Chowdhry, B.S. Challenges for practical applications of shape memory alloy actuators. Mater. Res. Express 2020, 7, 073001. [Google Scholar] [CrossRef]
- Prechtl, J.; Seelecke, S.; Motzki, P.; Rizzello, G. Self-Sensing Control of Antagonistic SMA Actuators Based on Resistance-Displacement Hysteresis Compensation. In Proceedings of the ASME 2020 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Virtual, Online, 15 September 2020. [Google Scholar] [CrossRef]
- Ujihara, M.; Carman, G.; Lee, D. Thermal energy harvesting device using ferromagnetic materials. Appl. Phys. Lett. 2007, 91, 093508. [Google Scholar] [CrossRef]
- Elahinia, M.; Esfahani, E.; Wang, S. Properties and Applications Control of SMA Systems: Review of the State of the Art Shape Memory Alloys: Manufacture, Properties and Applications; Nova Science Publishers: Hauppauge, NY, USA, 2010; pp. 49–68. [Google Scholar]
- Featherstone, R.; Teh, Y.H. Improving the speed of shape memory alloy actuators by faster electrical heating. In Experimental Robotics IX; Springer: Berlin/Heidelberg, Germany, 2006; pp. 67–76. [Google Scholar]
- Dynalloy, Inc. Technical Characteristics of Flexinol Actuator Wire; Dynalloy, Inc.: Irvine, CA, USA, 2018; Available online: https://www.dynalloy.com/pdfs/TCF1140.pdf (accessed on 1 September 2021).
- Villoslada, A.; Escudero, N.; Martín, F.; Flores, A.; Rivera, C.; Collado, M.; Moreno, L. Position control of a shape memory alloy actuator using a four-term bilinear PID controller. Sens. Actuator A Phys. 2015, 236, 257–272. [Google Scholar] [CrossRef] [Green Version]
- Kha, N.B.; Ahn, K.K. Position Control of Shape Memory Alloy Actuators by Using Self Tuning Fuzzy PID Controller. In Proceedings of the 2006 1ST IEEE Conference on Industrial Electronics and Applications, Singapore, 24–26 May 2006; pp. 1–5. [Google Scholar]
- Samadi, S.; Koma, A.Y.; Zakerzadeh, M.R.; Heravi, F.N. Control an SMA-actuated rotary actuator by fractional order PID controller. In Proceedings of the 5th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 25–27 October 2017. [Google Scholar]
- Ma, N.; Song, G. Control of shape memory alloy actuator using pulse width modulation. Smart Mater. Struct. 2003, 12, 12712. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.; Shin, Y.J.; Lee, J.Y.; Chu, W.S.; Ahn, S.H. Pulse width modulation as energy-saving strategy of shape memory alloy based smart soft composite actuator. Int. J. Precis. Eng. Manuf. 2017, 18, 895–901. [Google Scholar] [CrossRef]
- Motzki, P.; Gorges, T.; Kappel, M.; Schmidt, M.; Rizzello, G.; Seelecke, S. High-speed and high-efficiency shape memory alloy actuation. Smart Mater. Struct. 2018, 27, 075047. [Google Scholar] [CrossRef]
- Price, A.D.; Jnifene, A.; Naguib, H.E. Design and control of a shape memory alloy based dexterous robot hand. Smart Mater. Struct. 2007, 16, 1401. [Google Scholar] [CrossRef]
- Pan, C.H.; Wang, Y.B.; Pan, H.Y. Development of dynamically artificial flowers driven by shape memory alloy and pulse width modulation. In Proceedings of the 2015 IEEE International Workshop on Advanced Robotics and Its Social Impacts (ARSO), Lyon, France, 30 June–2 July 2015; pp. 1–6. [Google Scholar]
- Song, G.; Ma, N. Control of Shape Memory Alloy Actuators Using Pulse-Width Pulse-Frequency (PWPF) Modulation. J. Intell. Mater. Syst. Struct. 2003, 14, 15–22. [Google Scholar] [CrossRef]
- Song, H.; Kubica, E.; Gorbet, R. Resistance modelling of SMA wire actuators. In Proceedings of the International Workshop Smart Materials, Structures & NDT in Aerospace, Montreal, QC, Canada, 2–4 November 2011. [Google Scholar]
- Sittner, P.; Dayananda, G.N.; Brz-Fernandes, F.M.; Mahesh, K.K.; Novak, V. Electric resistance variation of NiTi shape memory alloy wires in thermomechanical tests: Experiments and simulation. Mater. Sci. Eng. 2008, 481–482, 127–133. [Google Scholar]
- Talebi, H.; Golestanian, H.; Zakerzadeh, M.R.; Homaei, H. Thermoelectric Heat Transfer Modeling of Shape Memory Alloy Actuators. In Proceedings of the 22st Annual International Conference on Mechanical Engineering-ISME2014, Ahvaz, Iran, 22–24 April 2014; Shahid Chamran University: Ahvaz, Iran, 2014. ISME2014-2206. [Google Scholar]
- Ikuta, K.; Tsukamoto, M.; Hirose, S. Mathematical model and experimental verification of shape memory alloy for designing micro actuator. In Proceedings of the 1991 IEEE Micro Electro Mechanical Systems, Nara, Japan, 30 January–2 February 1991; pp. 103–108. [Google Scholar]
- Madill, D.R.; David, W. Modeling and L2-Stability of a Shape Memory Alloy Position Control System. IEEE Trans. Control Syst. Technol. 1998, 6, 473–481. [Google Scholar] [CrossRef]
- Mitrev, R.; Todorov, T.; Fursov, A.; Fomichev, V.; Il’in, A. A Case Study of Combined Application of Smart Materials in a Thermal Energy Harvester with Vibrating Action. J. Appl. Comput. 2021, 7, 327–381. [Google Scholar]
- Todorov, T.S.; Fursov, A.S.; Mitrev, R.P.; Fomichev, V.V.; Valtchev, S.; Il’in, A.V. Energy Harvesting with Thermally Induced Vibrations in Shape Memory Alloys by a Constant Temperature Heater. IEEE/ASME Trans. Mechatron. 2021. [Google Scholar] [CrossRef]
- Nizamani, A.M.; Daudpoto, J.; Nizamani, M.A. Development of Faster SMA Actuators Shape Memory Alloys–Fundamentals and Applications; IntechOpen: London, UK, 2017; pp. 105–126. [Google Scholar]
- Mitrev, R.P.; Todorov, T.S. A Case Study of Experimental Evaluation of the Parameters of Shape Memory Alloy Wires. In Proceedings of the 10th International Scientific Conference on Engineering, Technologies and Systems, TechSys 2021, Plovdiv, Bulgaria, 27–29 May 2021. in press. [Google Scholar]
- Ralev, Y.; Todorov, T. Experimental setup for testing shape memory alloys. Bulg. J. Eng. Des. 2015, 27, 5–9. [Google Scholar]
- Szykowny, S.; Elahinia, M.H. Heat transfer analysis of shape memory alloy actuators. In Proceedings of the IMECE2006, ASME International Mechanical Engineering Congress and Exposition, Chicago, IL, USA, 5–10 November 2006. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Notation | Value | Unit |
|---|---|---|---|
| Diameter of SMA wire | d | 0.00035 | m |
| Initial length of SMA wire | s0 | 0.160 | m |
| Voltage | u | 5 | V |
| Resistance | R | 52 | Ω |
| Density of SMA | 6450 | kg/m3 | |
| Specific heat | 200 | J/(kg·°C) | |
| Convection heat transfer coefficient | 70 | W/(m2·°C) | |
| Room temperature | 26 | °C | |
| Martensite Young’s Module | 21.7 × 109 | Pa | |
| Young’s modulus of NiTi at partly twinned martensite | 0.56 × 109 | Pa | |
| Young’s modulus of NiTi at detwinned martensite | 11.1 × 109 | Pa | |
| Austenite Young’s modulus | 55.5 × 109 | Pa | |
| Yield strain of twined martensite | 0.0024 | - | |
| Minimum strain of detwinned martensite | 0.044 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitrev, R.; Todorov, T.; Fursov, A.; Ganev, B. Theoretical and Experimental Study of a Thermo-Mechanical Model of a Shape Memory Alloy Actuator Considering Minor Hystereses. Crystals 2021, 11, 1120. https://0-doi-org.brum.beds.ac.uk/10.3390/cryst11091120
Mitrev R, Todorov T, Fursov A, Ganev B. Theoretical and Experimental Study of a Thermo-Mechanical Model of a Shape Memory Alloy Actuator Considering Minor Hystereses. Crystals. 2021; 11(9):1120. https://0-doi-org.brum.beds.ac.uk/10.3390/cryst11091120
Chicago/Turabian StyleMitrev, Rosen, Todor Todorov, Andrei Fursov, and Borislav Ganev. 2021. "Theoretical and Experimental Study of a Thermo-Mechanical Model of a Shape Memory Alloy Actuator Considering Minor Hystereses" Crystals 11, no. 9: 1120. https://0-doi-org.brum.beds.ac.uk/10.3390/cryst11091120