2.2. Frame and Obstacle
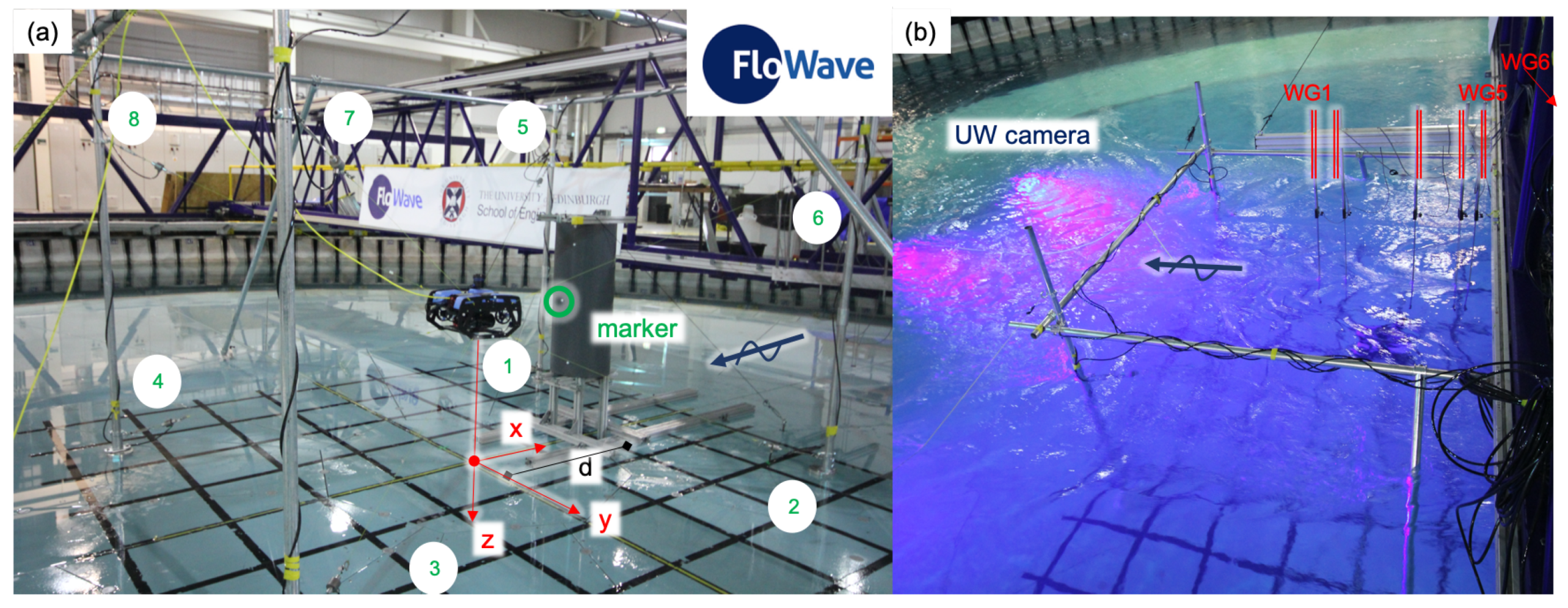
FloWave provides a water depth of 2 m with a 25 m diameter circular basin. 28 flow drives are located in a circle under the tank floor and generate flow speeds of up to 1.6 m/s in any direction. 168 wave makers allow the generation of complex sea states with wave components from any direction. The origin of the measurement coordinate system (global) was located in the centre of the tank on the submered floor. A right handed coordinate system was defined with the positive x-axis pointing against the main flow direction and z-axis orientated downwards (
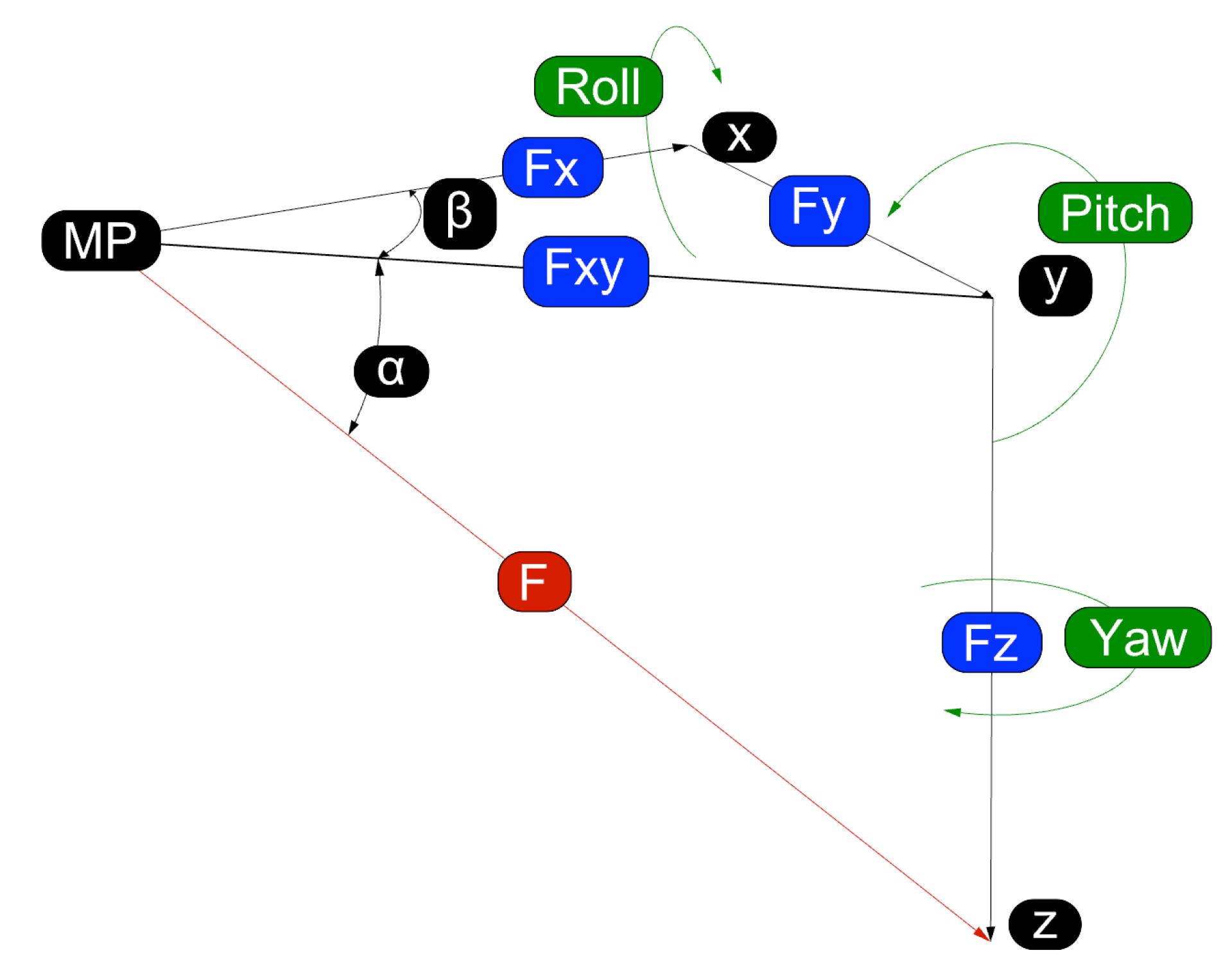
Figure 1). The ROV was connected to eight tethers to the frame. The tethers held the ROV at the mid water depth of 1 m from the floor. Galvanised tubes with an outer diameter of 48.3 mm were used to build up the frame. The frame was 3.47 m long in the x-direction, 2.52 m wide in the y-direction and approximately 2.5 m high (surface piercing). The four lower connection points of the tethers to the frame were placed as close to the floor as possible (approximately 120 mm above the floor), with the upper arrangement mirrored around the mid-depth plane. Each tether included one turnbuckle to provide a preload and also one reflective marker, which could be tracked by the motion capturing system. Knowing the position of the ROV, the mounting points (connection of the tether to the ROV) were calculated as virtual points. This allowed the direction of the force vector very accurately determined and three-dimensional force components to be resolved. The collected dataset includes the vectors for each load cell (V) in addition to the main coordinate components. Therefore, the calculated mounting point (MP) is subtracted from the measured frame marker (FP) as following:
Hence the vectors are pointing away from the ROV. The location of the MP on the ROV are provided in
Table 1 in relation to the centre of the rigid body, which was chosen as the centre of gravity.
Additional tests were conducted with a cylindrical obstacle positioned at three different distances
d of 0.9, 1.3 and 1.7 m from cylinder centre to ROV origin during three separate experiments. The obstacle had a diameter of 0.4 m and a length of 1 m. The cylinder was raised 0.45 m over the tank floor with a support structure (
Figure 1). Potential deformations, motions and vibrations due to the flow were observed via the motion capturing system but they were considered negligible (<1 mm).
2.3. Instrumentation
Three different types of measurement instrumentation were used: (a) Motion capturing system (MoCAP) recorded the motion and rotation of the different structures, (b) load cells (LC) measured the forces along the eight tethers and (c) wave gauges (WG) measured the free surface elevation in different locations. All instruments provided a measurement at the frequency of 128 Hz and are synchronised by a TTL pulse output by the tank control system, allowing synchronisation of the MoCAP and load cell data acquisition.
The MoCAP used four underwater cameras provided by Qualisys, which were mounted close to edge of the rising tank floor in the FloWave Ocean Energy Research Facility. This system allows the tracking of each individual marker to an accuracy smaller than 1 mm in all coordinate directions. Multiple markers defined a rigid body and provided results in all six degrees of freedom. The centre of the body was chosen to be the centre of gravity of the ROV. The motion and rotation results are part of the provided dataset [
4] presented in
Section 4. In addition, markers were added at each tether close to the load cell to provide the exact force direction. This vector is defined by the difference between the mounting point on the frame minus the mounting point on the ROV based on Equation (
1). The latter is a virtual point, which is calculated by the MoCAP based on the body of the ROV. Furthermore, this system was used to observe the motion and potential deformation of the frame and the obstacle in the flow conditions. All motions of the cylinder were significantly smaller than 1 mm, therefore the structure was assumed to be rigid.
Along each tether between the ROV and the frame, there was an in-line LC installed (
Figure 1). The four bottom ones as well as the two top ones in front of the ROV (positive x-coordinates) had a rated capacity (RC) of 100 N. LC7 and eight (back, top) had a RC of 500 N. LC7 and eight collected comparably noisier data when measuring lower forces. Ideally, all LC should be the same but only six 100 N were available at the time of the testing campaign. The accuracy of the LC was smaller
of RC (0.05% typical) [
26].
Free surface elevation was measured based on conductive wave gauges, which can provide an accuracy of smaller 1 mm [
27,
28]. The first five wave gauges WG1-5 were part of a reflection array and based on a Golomb ruler with an order of 5 (marks [11 9 4 1 0]; base length of 1 m). This array was mounted perpendicular to the gantry and presented in
Figure 1b. WG6 was installed on the opposite side of the gantry. The direction of the waves was maintained constant for all the experiments, and it was chosen to be 180
in the tank definition, which corresponds to the negative x-direction. Consequently, the waves passed first WG6 and last WG1. The ROV was located between WG3 and WG4. The coordinates for all six WG are provided in
Table 2.
2.4. Investigated Cases
The investigated flow conditions can be split into four different groups: (a) Regular waves (
Table 3), (b) irregular waves (
Table 4), (c) ROV motion (
Table 5) and (d) without waves (
Table 6), including still water measurements as well as different flow speeds and flow directions). The latter mentioned cases are the only ones, during which the ROV provided active forces into the system and in all other cases the ROV was only passive.
In the following Tables the direction of 180
represents the travelling direction of waves as presented in
Figure 1. This is equal to the negative x-direction and reached first the obstacle—if present—and then the ROV. In FloWave the flow speed is regulated based on the revolutions per minute (RPM) of the flow-drive units. Direction and RPM is needed to reproduce the same conditions again. Due to the circular tank the flow speed varies over the full area of the tank but based on the well-established control strategy a realistic, straight, velocity distribution can be provided in the main testing area around the centre of the tank by forcing a big eddy on each side of the tank to cover the remaining water body outside of the main testing area. The presented current speed is a mean velocity at the centre of the tank in mid water depth [
29].
For the wave cases three different time windows can be distinguished. The repeat time provides a fully developed wave in the tank and should be used for steady state investigations. Run time is equal to the time the wave makers were active. Hence, this includes the previous mentioned repeat time as well as the ramp up of the waves. A further expansion is provided by the capture time, which includes also ramp down time. Based on this a short constant time period before and after the waves are available. All following files are provided for the capture and the repeat time.
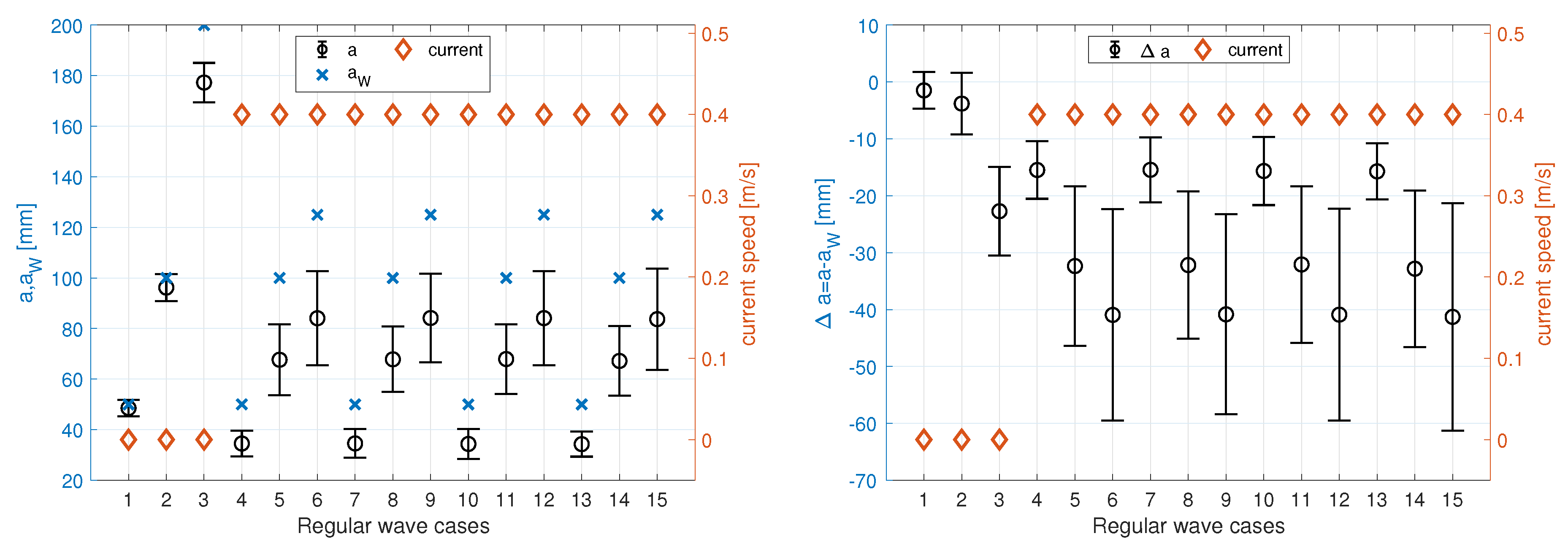
Three different regular waves were investigated with a constant wave frequency
of 0.5 Hz.
Table 3 presents an overview of the chosen input values. Initially also a wave amplitude of 0.2 m was investigated for the 0 m/s flow speed, which was for the further tests reduced to 0.125 m. Wave cases Reg4 to Reg15 provide three similar waves for a following flow speed of 0.4 m/s. Those cases include three different obstacle distances as well as the ROV only configuration.
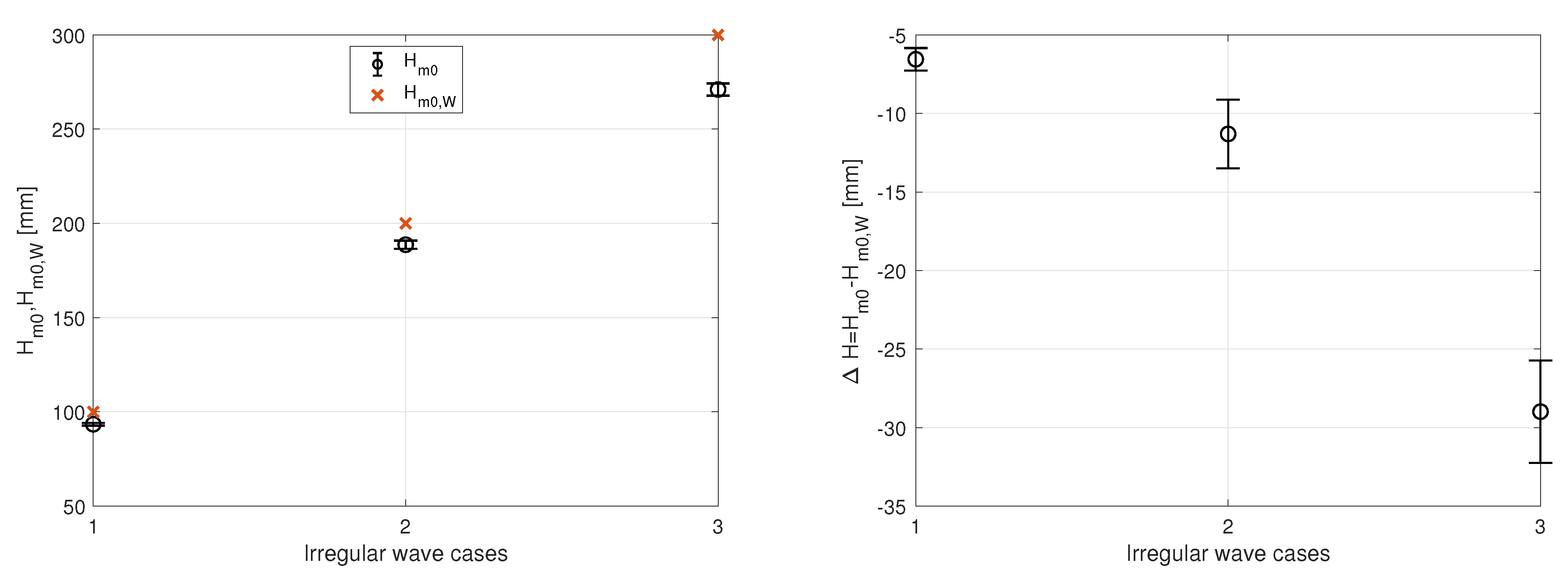
Irregular waves were only investigated in absence of currents. Three different heights
were defined and a constant random value (seed) 3.0 [-] was used. All the other parameters are shown in
Table 4. Both regular and irregular waves are only exemplary and should allow to help to quantify the effect of the wave load on the ROV.
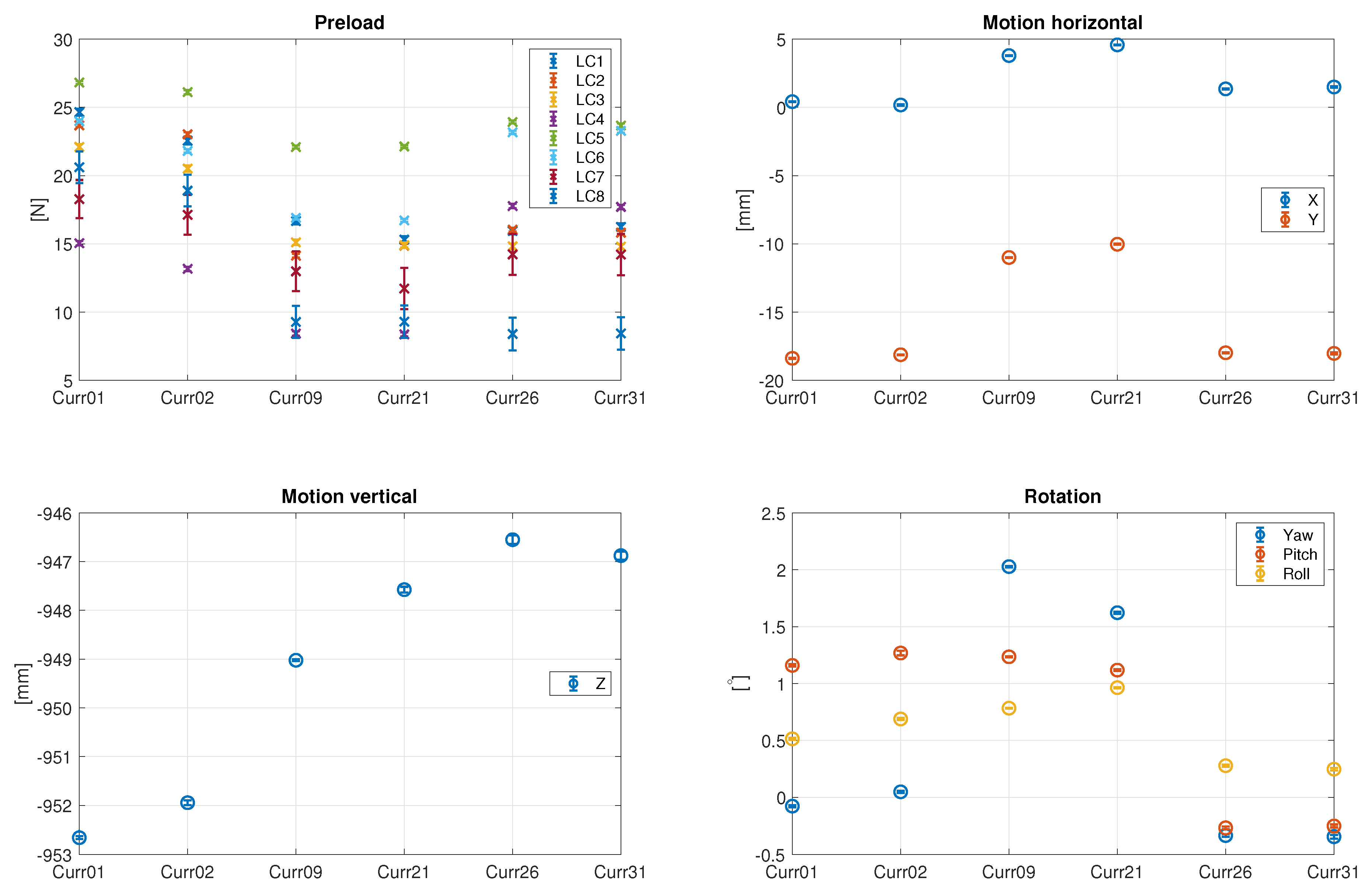
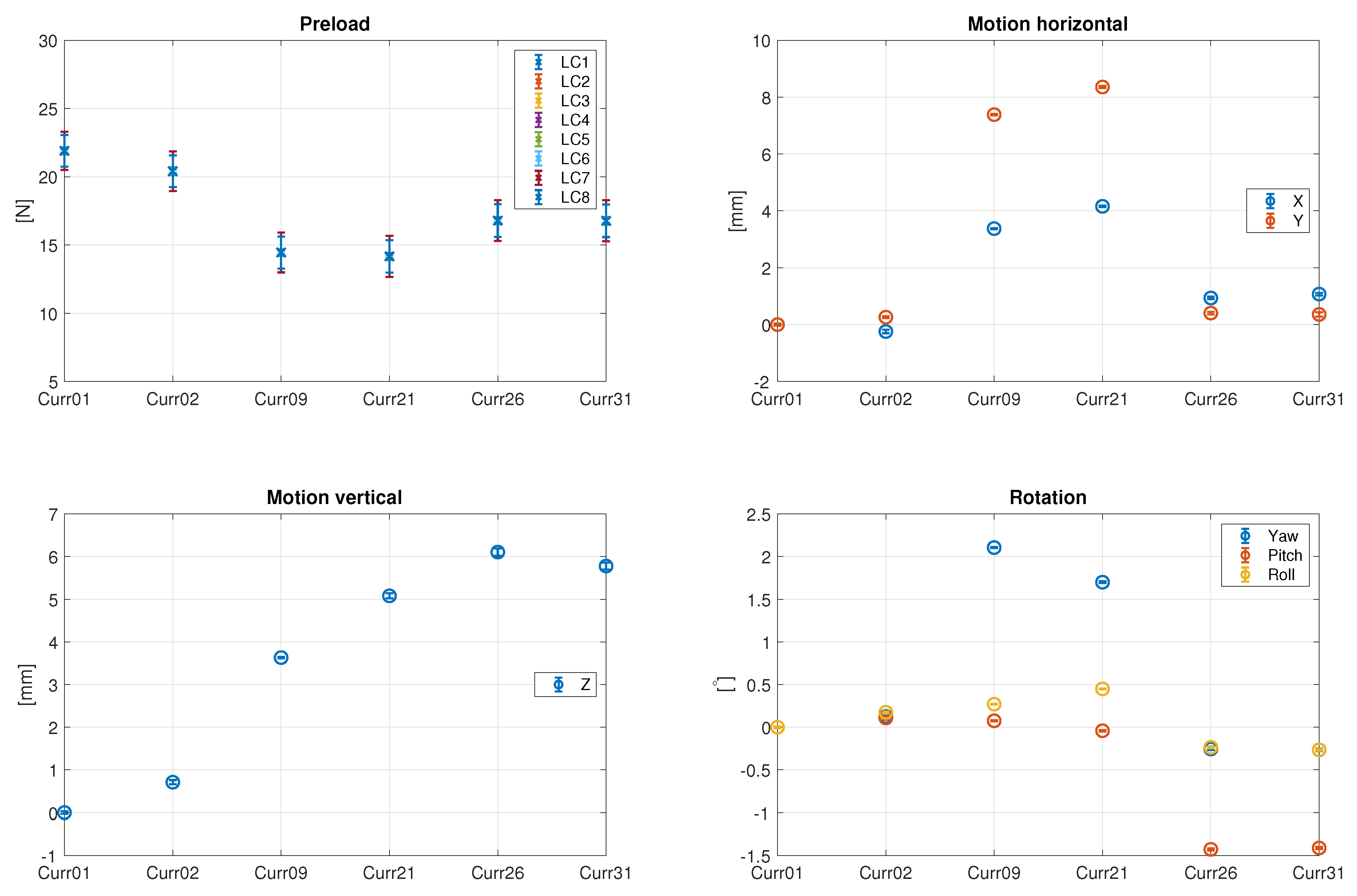
Table 5 presents an overview of investigated cases for which the ROV was active and provided thrust and forces into the tethers. Two still cases allow a quantification of the preload in each tether for the fully submerged case. Those cases are identical to the Curr01 and Curr02 in
Table 6. During the first eight measurements the ROV received a steady state command and after a stabilisation period the capturing of data was triggered. During the second group of measurements, the ROV moved dynamically in one main direction. For the sake of completeness, it has to be mentioned that no obstacle was present for those tests.
Table 6 presents the cases, which were characterised by pure flow conditions in different directions and speeds, with and without the obstacle at three different distances. The speed of the flow varies from 0 m/s up to 1 m/s in the centre of the tank. The measurements with the highest velocities, namely Curr07 and Curr08, mobilised a big amount of seeding (neutral buoyant glass spheres), which reduced the visibility in the tank. The seeding was added to the water during previous experimental investigations to measure the flow speed. The light settings for the MoCAP were constantly monitored and corrected, but in some cases the changes were too big and data could not be provided for the full length of the tests. The previously mentioned two cases as well as the run Curr20 includes substantial missing data, which is represented as NaNs (Not a Number) in the file. The other files also include very rare occasions when this happened. Nevertheless, the length of the tests should provide good data for the steady conditions.
With an obstacle placed in front of the ROV the velocity was initially limited to 0.6 m/s, but the construction proved to be very stable. Hence, the control case of flow from the back (Curr22, flow direction 0) was replaced by an additional increased velocity of 0.8 m/s for the closest and middle distance of the cylinder to the ROV.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}