In this project, an attempt was made to develop an opening system that works without the use of the hands, adaptable to doors with a “pull/push” axis of rotation, which is the most common in the majority of buildings. These systems, commonly referred to as handles, are usually pieces of wood, metal, or porcelain pulled to open drawers and doors.
2.1. Ergonomics, Interaction Concepts and Design
Ergonomics can be considered a decisive factor in each product design project, and can be involved in three complementary approaches [
17]: (1) developing new techniques and strategies that can allow an unaided person to perform better on the spot at work, at home or in the community; (2) developing specialized tools or assisted technologies that can maximize the use of residual skills and compensate for missing skills; (3) changing the design of the world to make it more usable and to offer a broader range of skills and abilities.
The domain of interaction, where ergonomics is central, influences the symbiotic relationship between humans and the product, allowing the user to understand what to do and then evaluate the results to determine the following action [
18]. In this way, we identified 4 of the 6 Norman principles, affordance, signifiers, constraints, and feedback, as important concepts in the development of this project:
“Affordance” is probably the principle that could have the most significant impact on this project and can be defined as the relationship between a physical object and a person (or any agent: animal, human, or even machine and robot). The quality of an object allows the user to identify its functionality without previous explanation, which can happen intuitively (e.g., doorknob) or based on previous experiences (e.g., white colour can mean peace). The greater the “affordance”, the better the identification of its use. It is important to note that “affordances” of physical objects are based on their size, format, and weight, while those of virtual object (web, app, etc.) happen through graphic representations and metaphors;
“Signifiers” refer to any mark, sound, or any perceptible indicator that communicates the appropriate behavior to a person. These signs can be deliberate and intentional, but also accidental and unintentional;
“Constraints” are powerful clues limiting the set of possible actions, which can be of physical, cultural, semantic, and logical order. The deliberate use of design restrictions allows people to readily determine the appropriate course of action, even in a new situation;
“Feedback” concerns the communication of the results of an action and contributes decisively to reducing the user’s frustration and stress.
Another characteristic intrinsic to the objectives of this project is attractiveness, which, as highlighted by Norman [
19], is a consequence of aesthetic quality that can function as a valuable attribute.
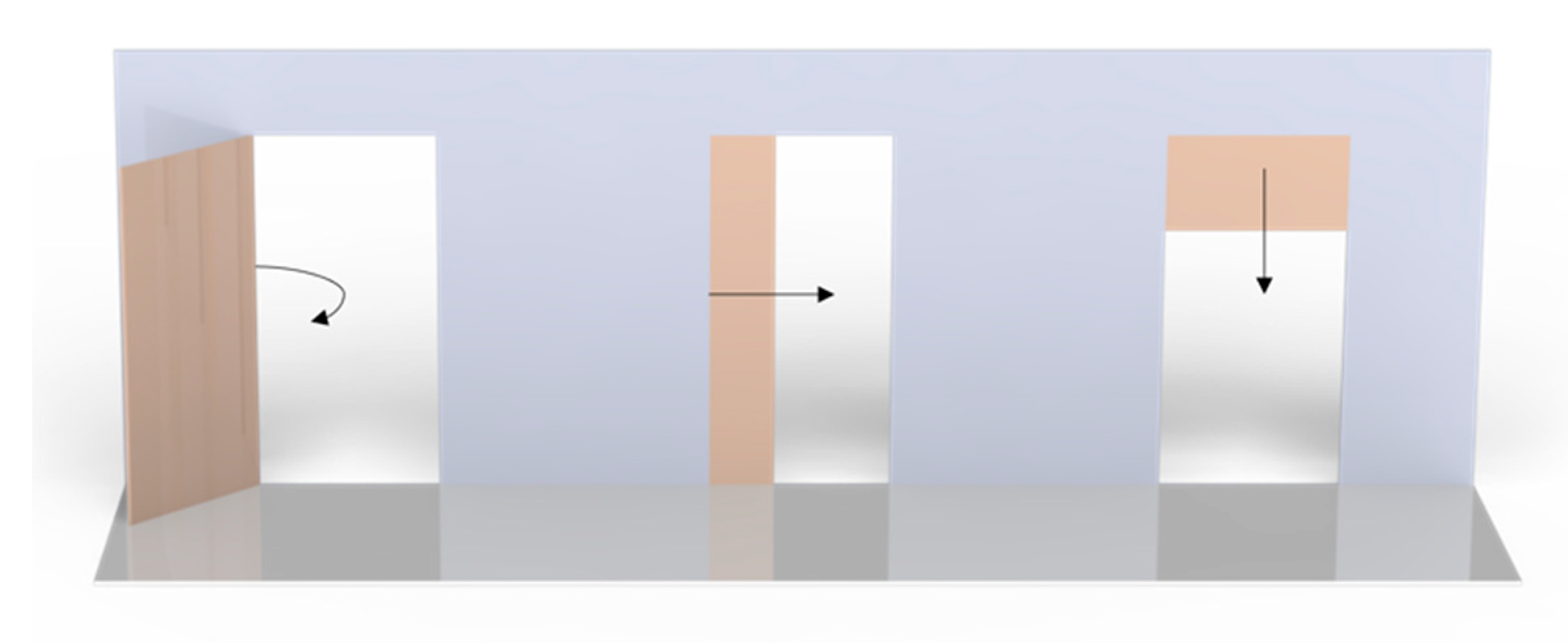
HFDOs’ basic operative concepts show that for a correct interaction between the user and a hands-free opening device, the device needs to allow the user to easily place the forearm in a vertical position behind the front part of the handle and pull (1). This way, the hands never touch the handle and remain clean and hygienic (2). The user rotates and moves away when the door opens, naturally releasing the arm (3). The ends of the handle must be rounded to prevent injures (4). For the correct performance of these actions, the Americans with Disabilities Act (ADA) standards guide [
20] states that the operable parts must be usable with one hand, must not require gripping, pinching, or twisting of the wrist, and must require no more than 22.3 N of force to operate.
The guiding principles of this project follow the premises of universal design that can be defined as strategies to create environments suitable for use by anyone, regardless of age, size, or capacity [
21]. Universal design can be considered the practice of designing products or environments that can be used effectively and efficiently, both by people without limitations and by those who operate with functional limitations, for example, due to physical-motor handicaps [
17]. In this sense, the design of the proposed system was developed to be attractive, easy to learn, and effective in being easily operated by the user. The project’s technical specifications involved two complementary domains, namely the scientific aspects presented in the previous point and the definition of technical requirements and performance variables. To identify technical specifications, visits were made to a number of Portuguese hospitals, duly accompanied by technicians from the maintenance sector, and it was concluded that the vast majority of doors were equipped with handles of the lever type with a circular profile or a blade profile. Complimentary visits were made to other locations with a high flow of people, such as shopping centers and public service institutions, emphasizing schools and banking entities, showing that the most commonly used handles were those with circular and square tubular sections. Based on these visits, oral discussions, questions, and answers from stakeholders and through the observation of existing equipment, the technical requirements and design were produced for a device with modular characteristics, which is easy to assemble, with a base for a lever handle with a circular profile (identified as being the predominant type) and with simple adaptation to other types of handles by changing the device’s accessories. The creation of this system device resulted from a continuous iterative process, reaching the following objectives:
Creating a system appropriate for various handle geometries, ensuring its versatility;
Manufacturing using an easy-to-clean material and geometry, enabling its decontamination;
Guaranteeing fundamental characteristics/properties for intensive use, considering mechanical resistance, stiffness, and resistance to fatigue;
Designing for intuitive use.
The research previously presented in the introductory section showed the existence of solutions on the market that, despite being partially effective, were not efficient. As static devices, without any dynamic component, they do not allow a continuous movement between the rotation of the door around its axis of connection to the wall and the passage of the user in front of it, who is obliged to remain behind it. Because of that, users often need to resort to the foot to immobilize the door and thus overcome it. This difficulty is mostly evident in doors with an automatic closing spring, present in most educational and health institutions.
Thus, the addition of dynamism to the device was considered, assuming that it would result in greater functional efficiency, aiming to help the user to understand the existence of the original handle, promoting the notion that this device is an auxiliary to the existing handle, helping in the perception of its correct use.
2.2. Geometrical Models—Description of the Project Evolution
The three-dimensional geometry of the models was created using modelling software (Solidworks
® 2019, Dassault Systèmes SOLIDWORKS Corp., Waltham, MA, USA).
Table 1 presents a summary of the Auxiliary Door Opening Device’s (ADOD) evolution. The description of the project’s evolution is described.
Based on the models mentioned above, the first geometric model resulted from an attempt to adapt to different handle geometries, namely cylindrical and “L” type shapes. Ergonomics was also considered, mainly in the contact region between the forearm and the device, to make the door opening experience as pleasant as possible. This prototype also tried to guide the user towards correct use, demonstrating that its geometry is intuitive to manipulate.
Figure 2 illustrates the result of this first approach, purely technical and functional, designed as Auxiliary Door Opening Device, version 1 (ADOD-V1).
The research previously presented in the introduction showed the existence of solutions on the market that, despite being partially effective, were not efficient, being static devices. Based on the identified difficulties associated with the static systems, the addition of dynamism to the device was considered as a project reference for development. Assuming that the dynamic component would result in greater functional efficiency, the next focus was to transmit to the prototype a language that would simultaneously translate the mentioned dynamism associated with ergonomics and integration in the door. In this context, it was hoped that the formal language would result in a simple and attractive piece without sharp edges, which would induce its correct form of use.
This piece, in its initial version, was a compact block of material. Still, for aesthetic, hygiene, and weight reasons (visually and physically), an opening in the vertical piece was designed, thus reducing the surface available for contamination. This opening was also intended to help the user understand the original handle’s existence, promoting the notion that this device is an auxiliary to the existing handle, helping in the perception of its correct use.
Figure 3 show this new language (ADOD-V2).
Although the device’s compatibility with different door handles is a critical component, the identification of doors for which the product is intended mainly includes two types of handle: “L” and “D” shaped. This assumption, identified by the consortium, as described above, led to the development of a requirement to prioritize this type of handle. Thus, this project considers these two types of handles, resulting in a simpler geometry. At this stage, an approach to a mechanism for fixing the prototype to the handle has already been developed. The part was divided into two components, the fixation to the handle and the vertical element. This will allow greater versatility in future situations, since it will permit keeping the vertical component while only producing new fixing parts, according to the different existing handles’ geometry.
In addition, a spring was included in this model that would allow the dynamic component to be put into effect. Initially, we considered using a spring since it does not affect the product’s geometry in an evident way. Additionally, some dimensional adjustments were made to the height of the vertical element (leaf) so that the dynamic movement can be accompanied by a comfortable contact surface, with the arm or forearm, that effectively adapts to the dynamism of the opening movement.
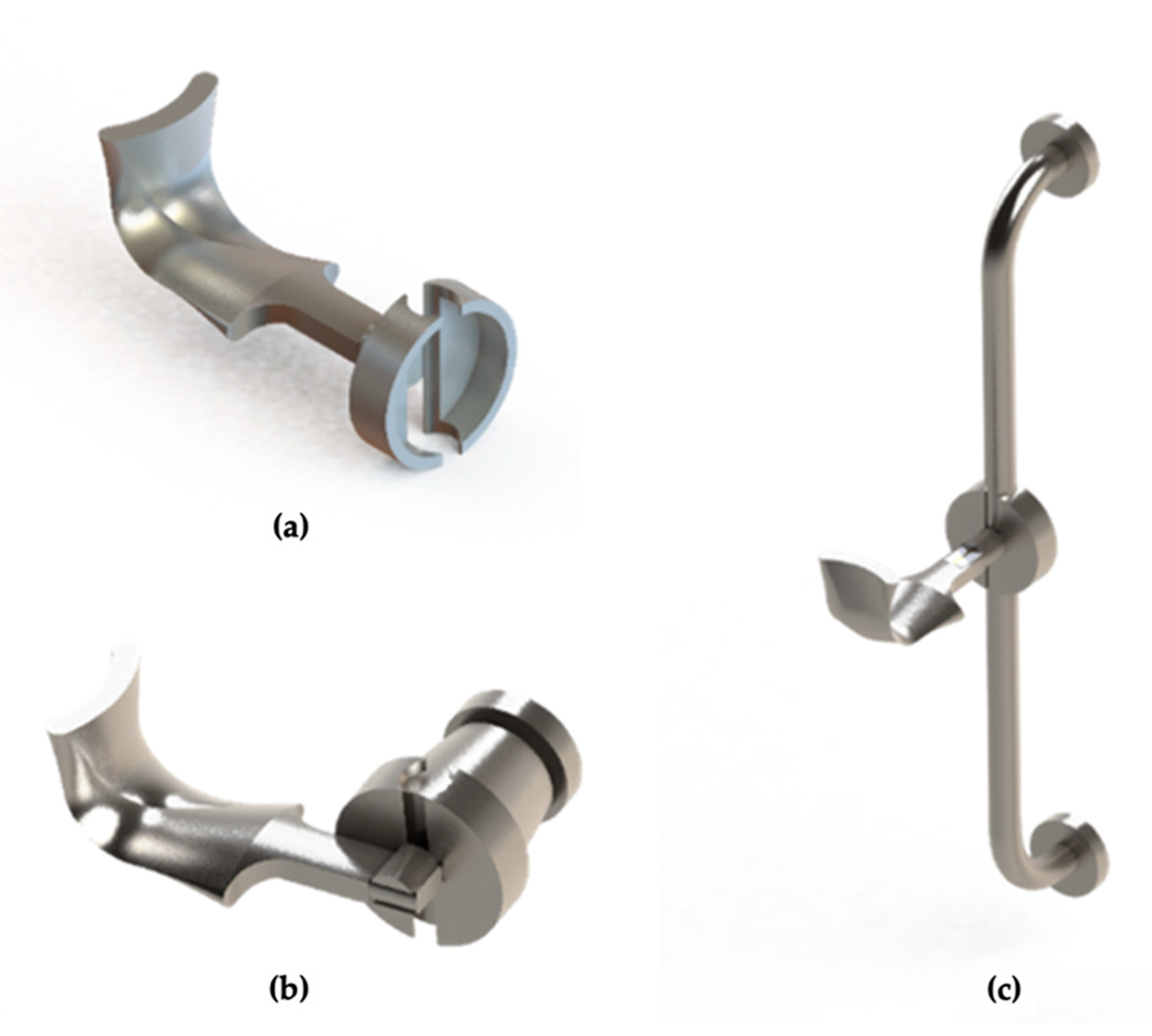
Figure 4a shows the first developments of the model ADOD-V3, including the dynamic component with a spring. The high number of components in the system for fixing the device to the handle is evident, in addition to the presence of holes and geometric details that could promote the accumulation of pathogens, so the next iteration considered the elimination of these critical areas. Thus, a further evolution of the model (
Figure 4b) reveals a smaller number of components and a geometry that facilitates cleaning and decontamination and transmits a language of continuity between the vertical leaf and the connection to the handle. This language was achieved by replacing the spring with a torsion spring.
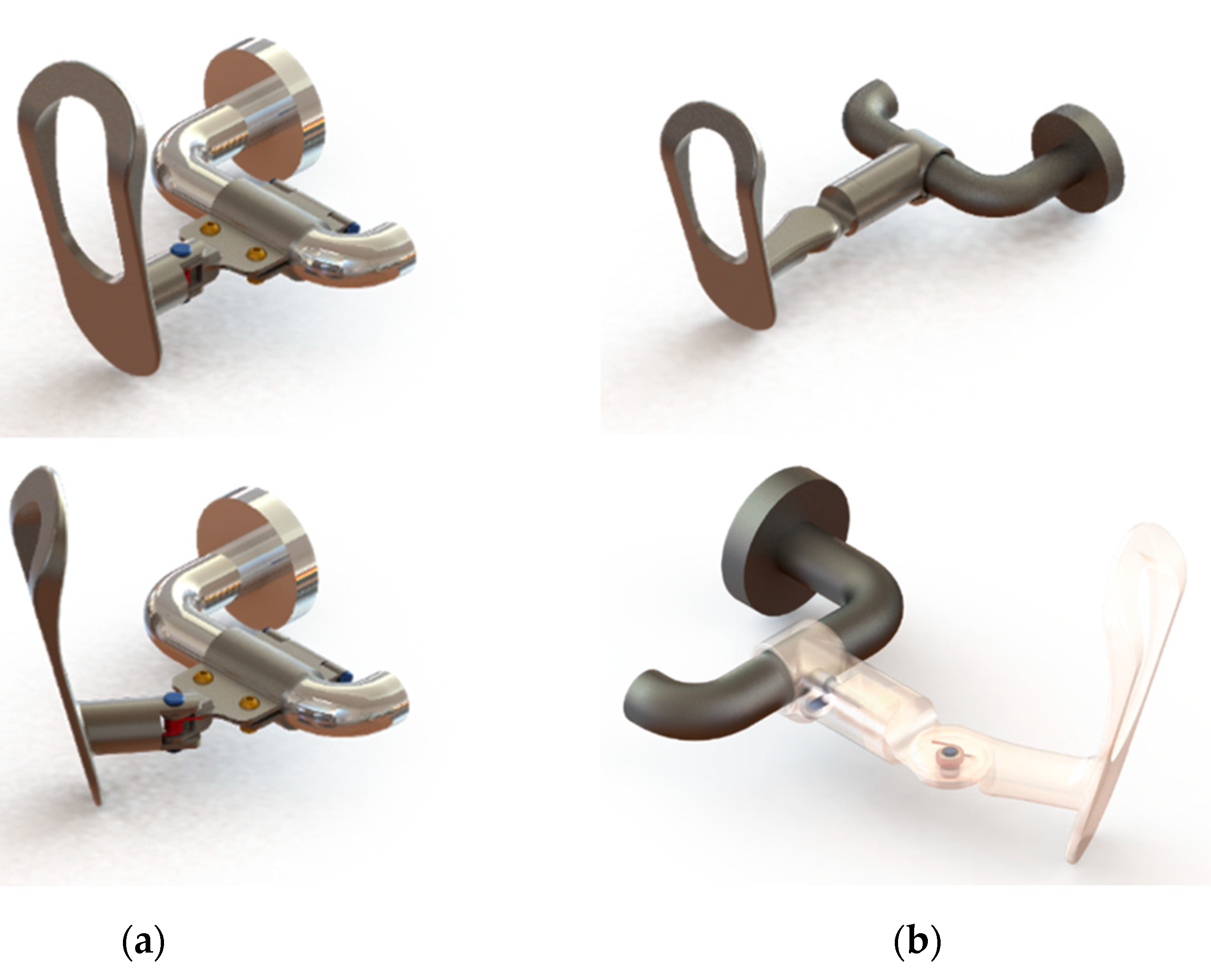
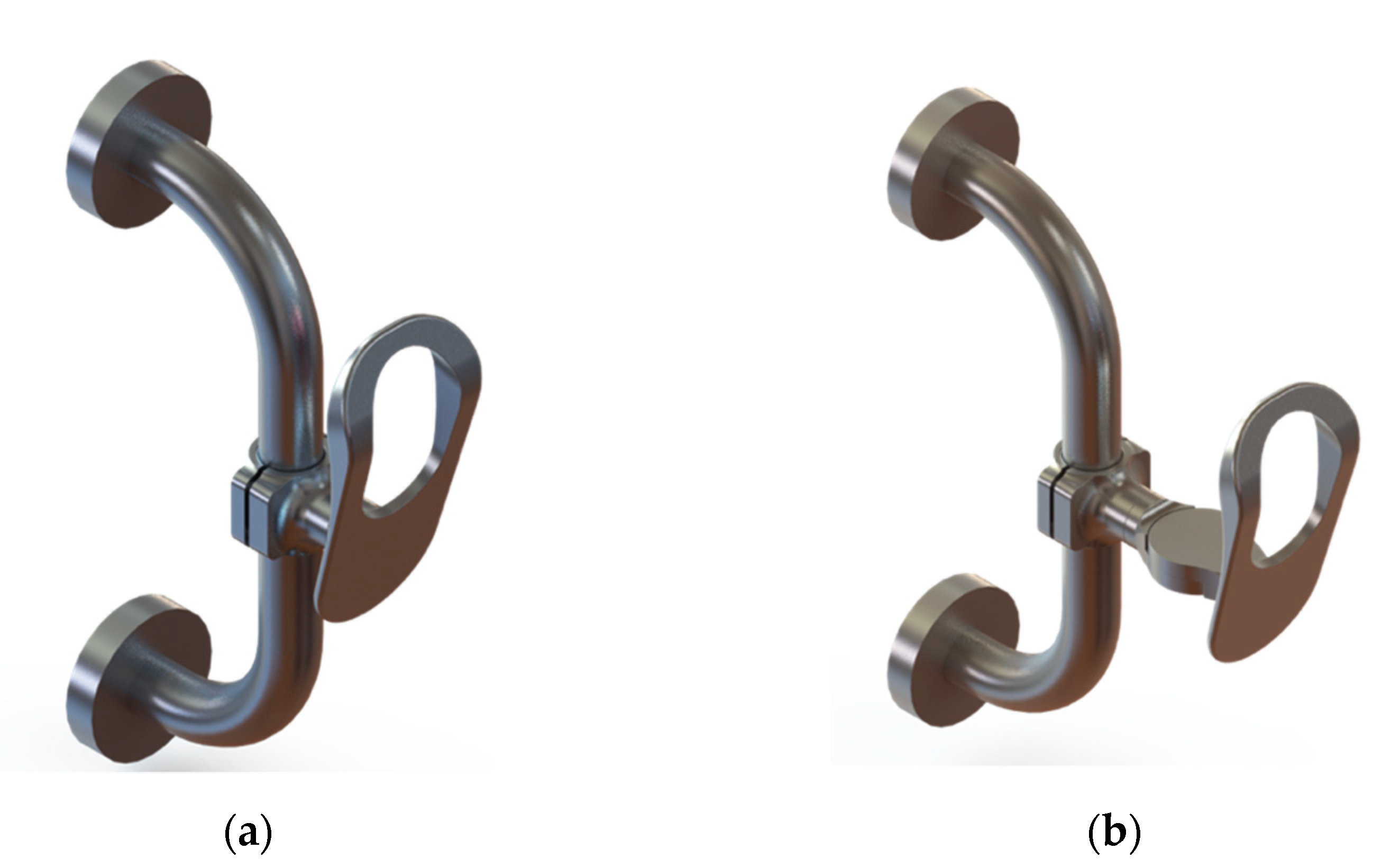
To guarantee the coupling to different types of handle geometry, an evolution of the system, with a simple clamp and a simple spring (ADOD-V4), was defined (
Figure 5a). The previous model fulfils its function, but only if the rotation is carried out in one direction, as only a single torsion spring was applied, which only allows this type of movement. In this way, a second torsion spring was added to increase the versatility of the device and make it possible to be mounted on any door, whatever the direction of its opening. This characteristic required geometric modifications that resulted in the ADOD-V5 model (
Figure 5b). With a quadrangular connection, both systems provide four different positions, allowing them to be implemented on different handles.
This project is a typical example of how the creation of a product develops. Initial assumptions are considered that change or consolidate throughout the various iterations. Sometimes it is questioned whether all of the decisions and paths taken were the correct ones, and, in most cases, the solution to this type of challenge lies in simplicity. In this sense, the team decided to develop a model based on simplicity while maintaining the main requirements.
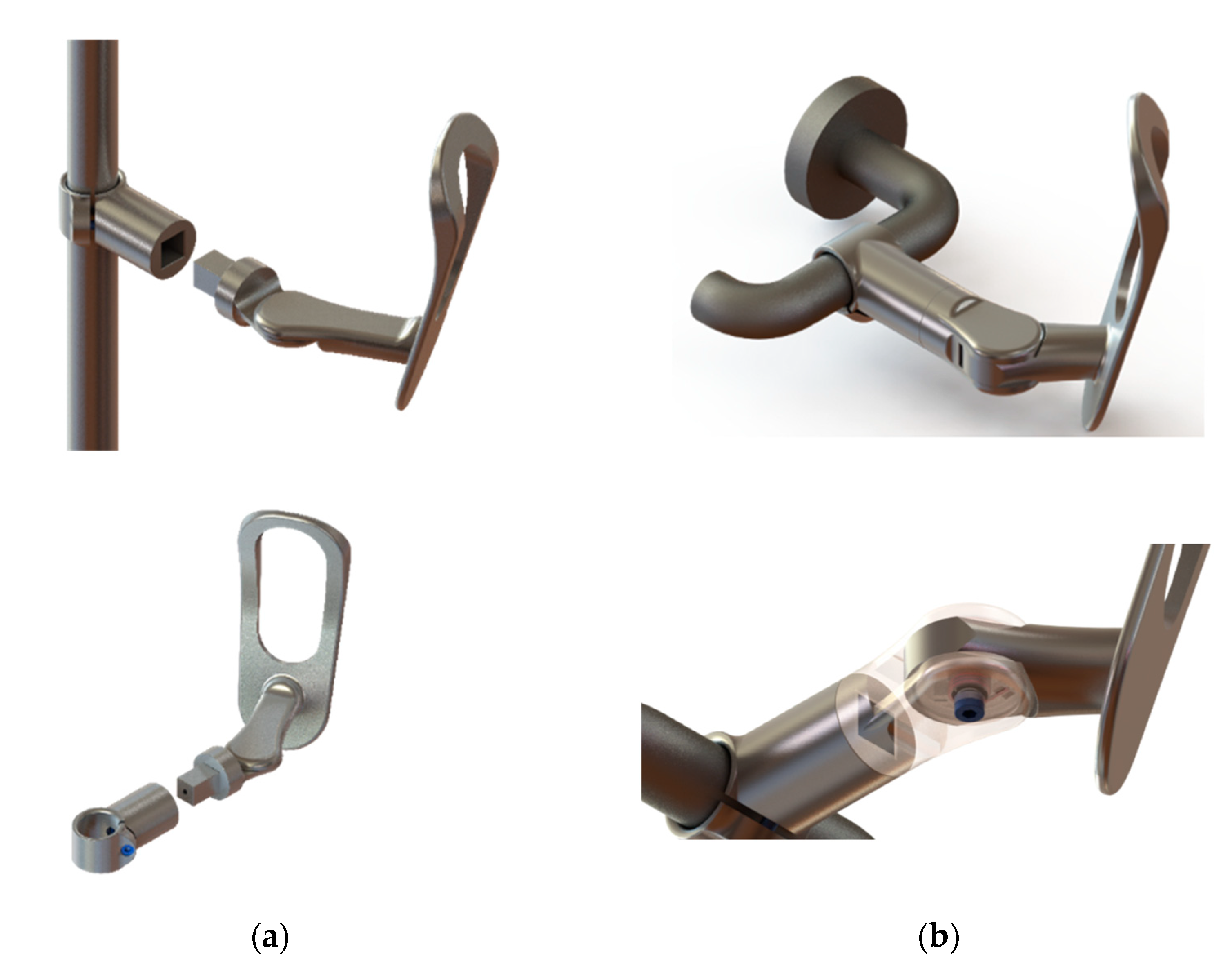
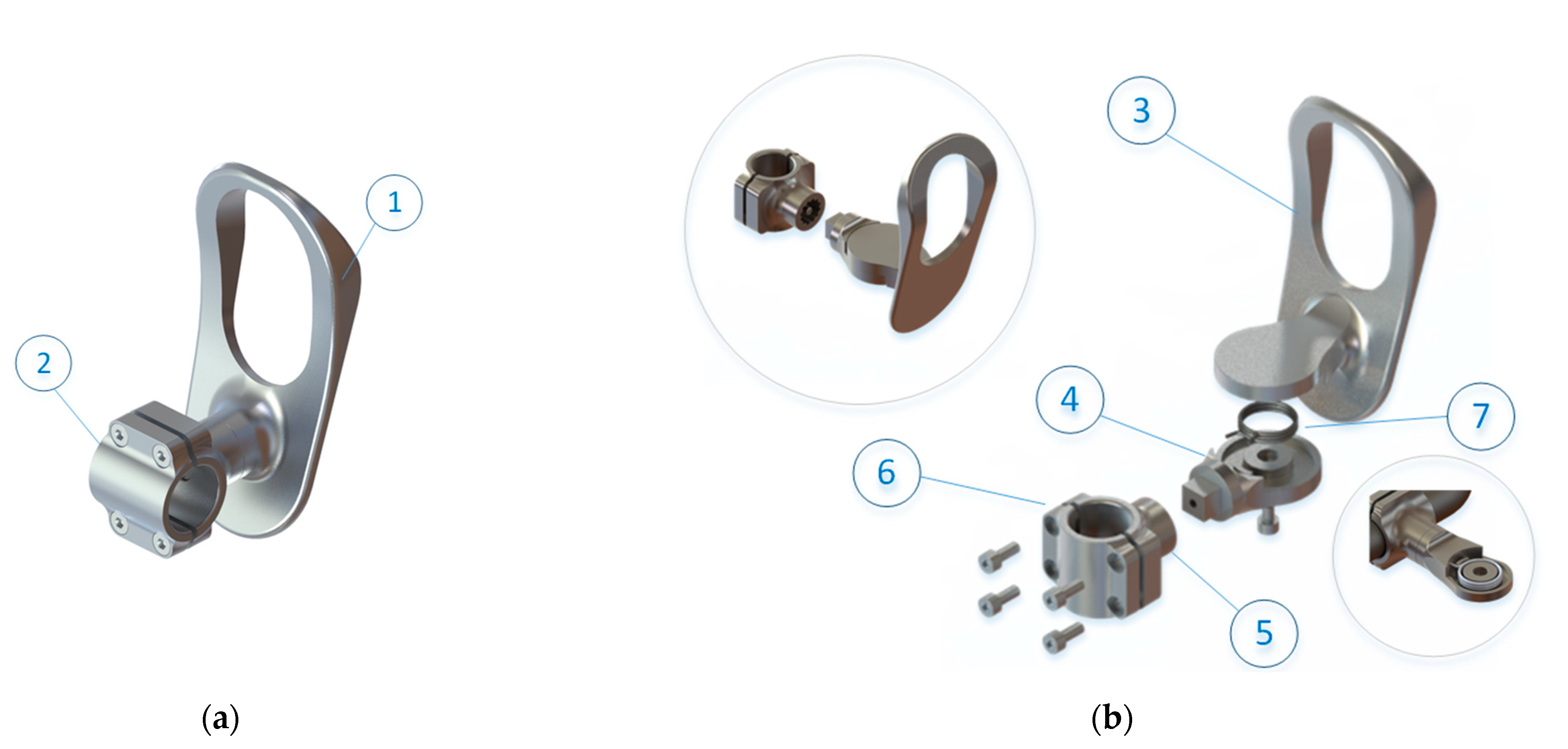
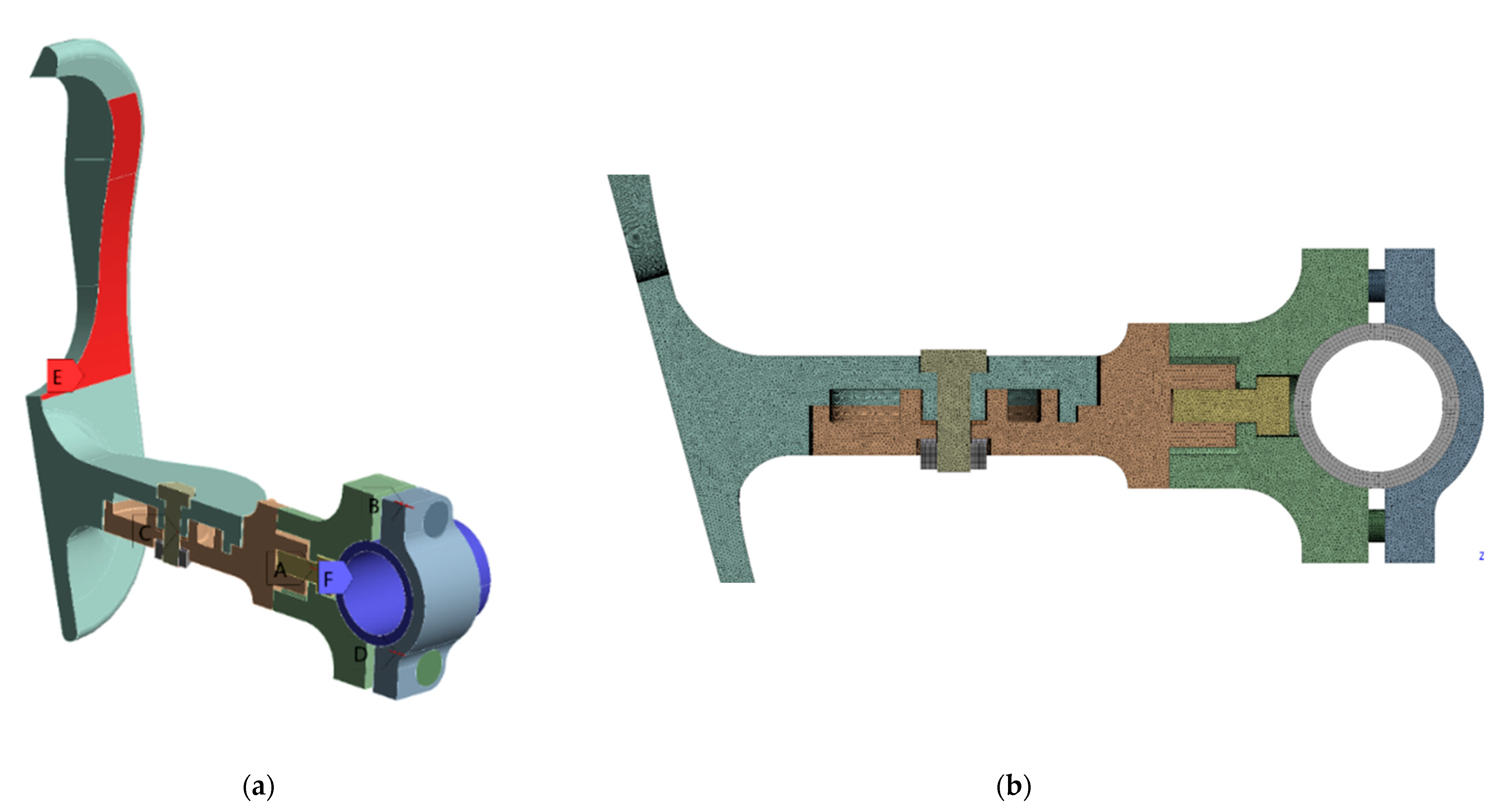
In previous models, the possibility of mounting on the “L” and “D” handles was an objective that was only partially fulfilled, since the geometry of the connection between the handle and the device only allowed for fixing on open handles, as is the case of the “L” handles. The “D” handles, being closed, do not allow the device to be anchored. Thus, the connection geometry was changed and now consists of two components that make it possible to mount the device on both “L” and “D” handles (
Figure 6a,b).
These changes led to the realization that, although its functionality was not compromised, ergonomics and language coherence, considered as being important requirements in this project, were included. In this sense, there was a need to rethink the type of spring used, since the formal and dynamic component that characterizes the device is dependent on mechanical components that allow dynamism. The mechanical components that particularly allow the type of movement desired—that is, rotation after load application and subsequent return to the initial position—are the springs. For this reason, different geometric approaches were carried out, considering the diversity of solutions that the said mechanical component offers.
At this stage, it was also considered essential to study the influence that two parameters could have on the functioning and performance of the device under development: the distance from the vertical component to the center of rotation of the prototype and the vertical dimensions of the forearm’s contact zone with the device. All of the evolutionary prototypes developed were also produced through additive manufacturing, using 3D printers, to observe preliminary functional tests, and these dimensions were adjusted based on experimental tests.
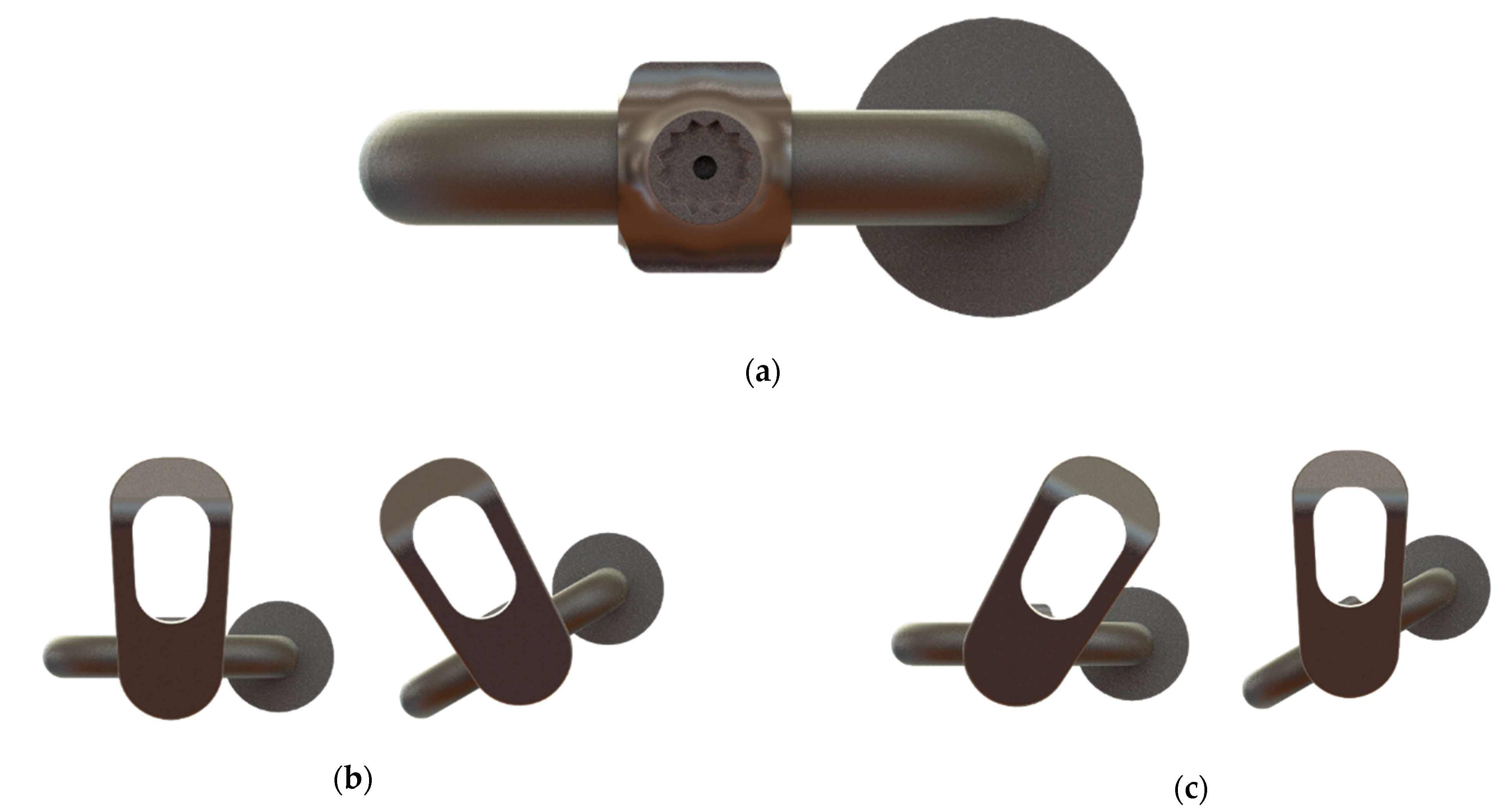
Through this functional analysis based on produced components, combined with the 3D modelling implemented, it was found that during the opening movement, the axis of rotation of the device was gradually tilting. This fact led us to implement a solution based on coupling with angular discretization (30°), as represented in
Figure 7. The image on the left (
Figure 7b) shows a vertical starting position of the leaf, with a final inclination. The image on the right (
Figure 7c) shows an initial inclination position, leading to the final vertical position of the leaf.
As the different models were being developed, prototypes were produced to test several aspects of their functionality, such as ergonomics and design.
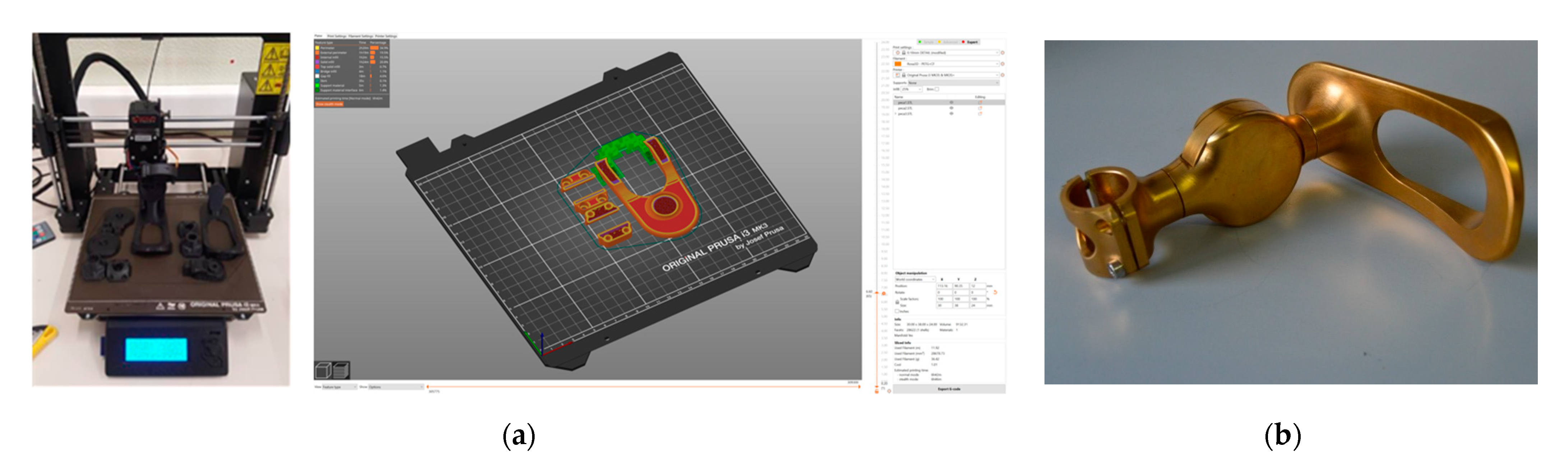
Figure 8a shows an example of 3D prototyping, with a Prusa mk3s+ equipment, producing the mechanical components in polyethylene glycol terephthalate with carbon fiber (PETG-CF), a material with good mechanical properties.
Figure 8b shows an example of a brass prototype produced with a CNC machine.
Adjusting 3D printing parameters is an essential procedure to obtain components with the desired precision and mechanical characteristics. After a process of adjustment and optimization, the parameters considered are presented in
Table 2.
2.7. Usability Testing Protocol
A protocol with a set of usability tests was prepared to identify the results obtained with the developed system. Usability testing is a technique used in user-centered interaction design to evaluate a product by testing it on users. It provides direct input on how real users use the system [
22]. As a result of usability testing, a measure of a human-made product’s capacity to meet its intended purpose will become available.
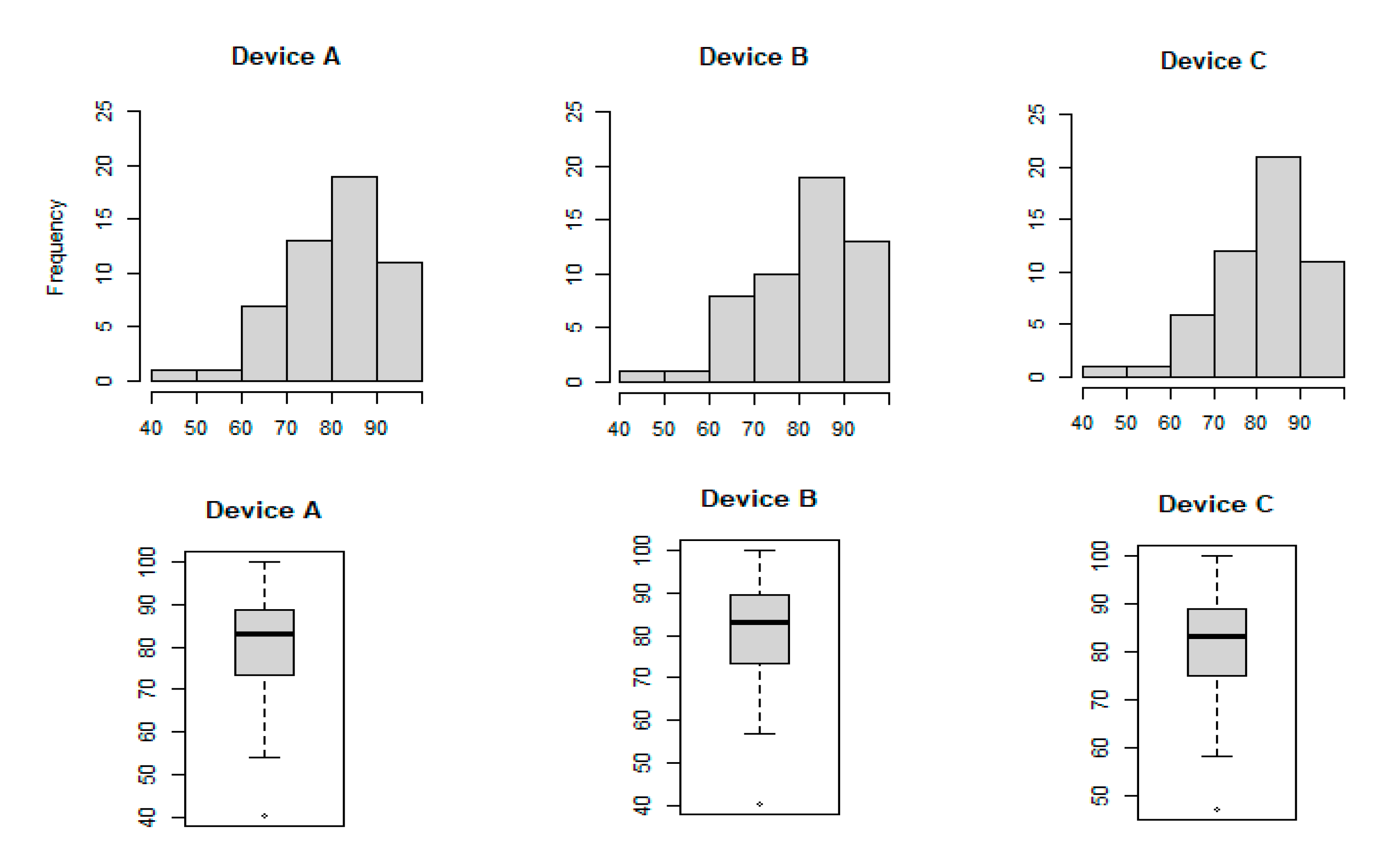
There are several scale usability scores (SUS) available. A SUS allows for evaluating a wide variety of products, becoming a reference in the industry [
23]. These scale use a list of questions, and for each of them, a Likert scale is used to provide an answer. Some of the questions have a positive emphasis, while the others have a negative one. To analyze the results, a score must be created. An average score of 68 points, on a 0–100 scale, means there are no usability problems with the product.
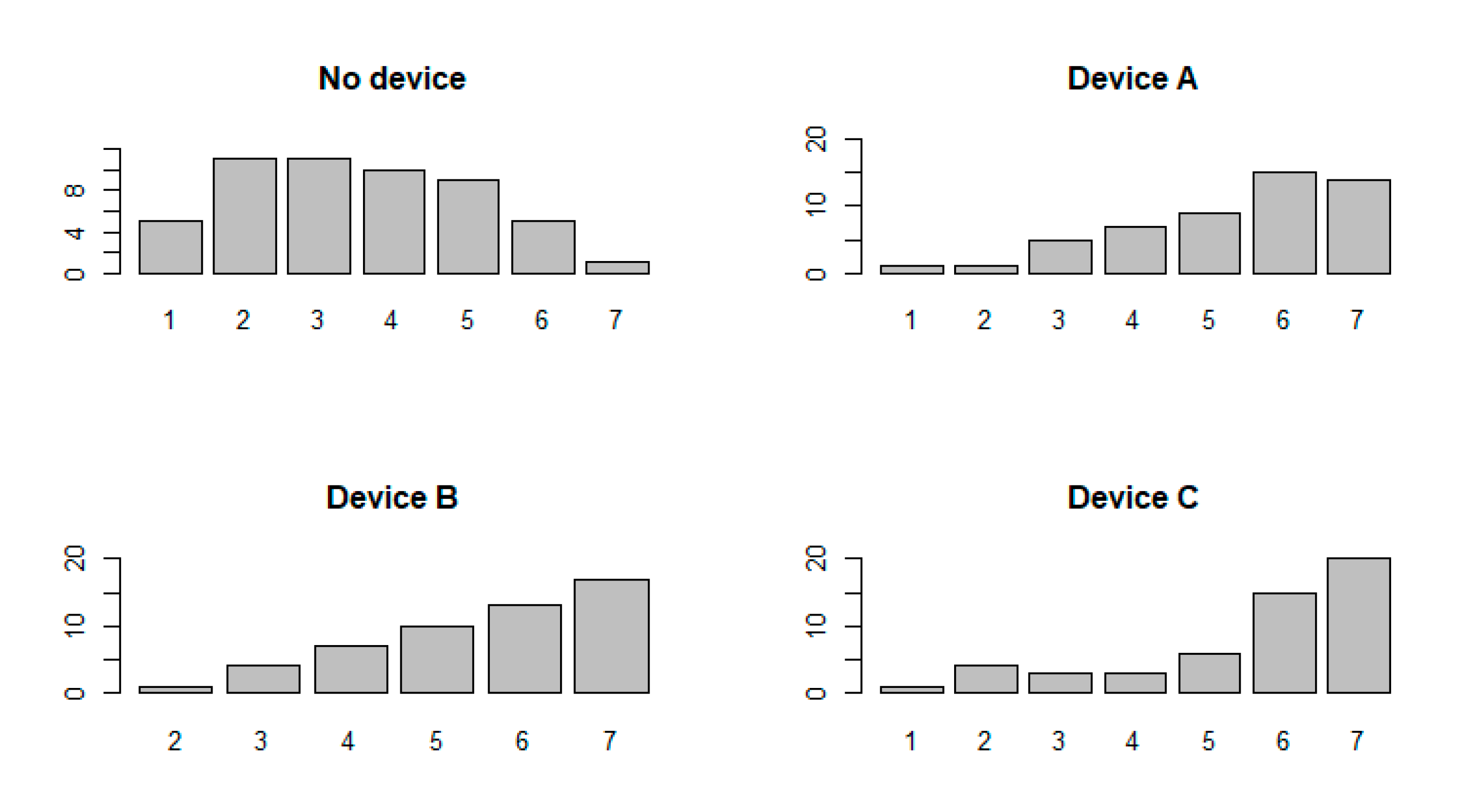
The usability tests were performed within a university campus context (Polytechnic of Coimbra, School of Engineering) in a building with several equal doors and handles. Three doors were prepared with one of the different kinds of devices on each:
Short-fixed, referred to as “A”. The simplest device, without dynamic rotation and with a short distance to the handle;
Long-fixed, referred to as “B”. The same as dynamic, but with dynamic rotation blocked;
Dynamic, referred to as “C”. The developed device, with dynamic rotation to follow the arm.
The tests were performed for several days, and a total of 52 volunteers participated in the usability study. Before participation in the usability test, the volunteers were informed about the objectives and methodology and gave informed consent. As a criterion for inclusion in the sample, being a member of the university was the only criterion considered. As an exclusion criterion, the inability to perceive informed consent was considered. The protocol for usability tests with the volunteers was prepared to follow the Declaration of Helsinki and was approved by the Polytechnic of Coimbra Ethical Committee (Reference No. 110_CEPC2/2020). The protocol involved opening 4 doors, and the volunteer had to open and transpose the door without using their hands, in a random order, following the intuition to use the system. One of the doors did not have any device clamped to the handle, and the other three doors each had one of the devices clamped onto it. All the doors opened to the same side.
Figure 12 shows a volunteer opening the door “C”, prepared with the dynamic system clamped onto the handle.
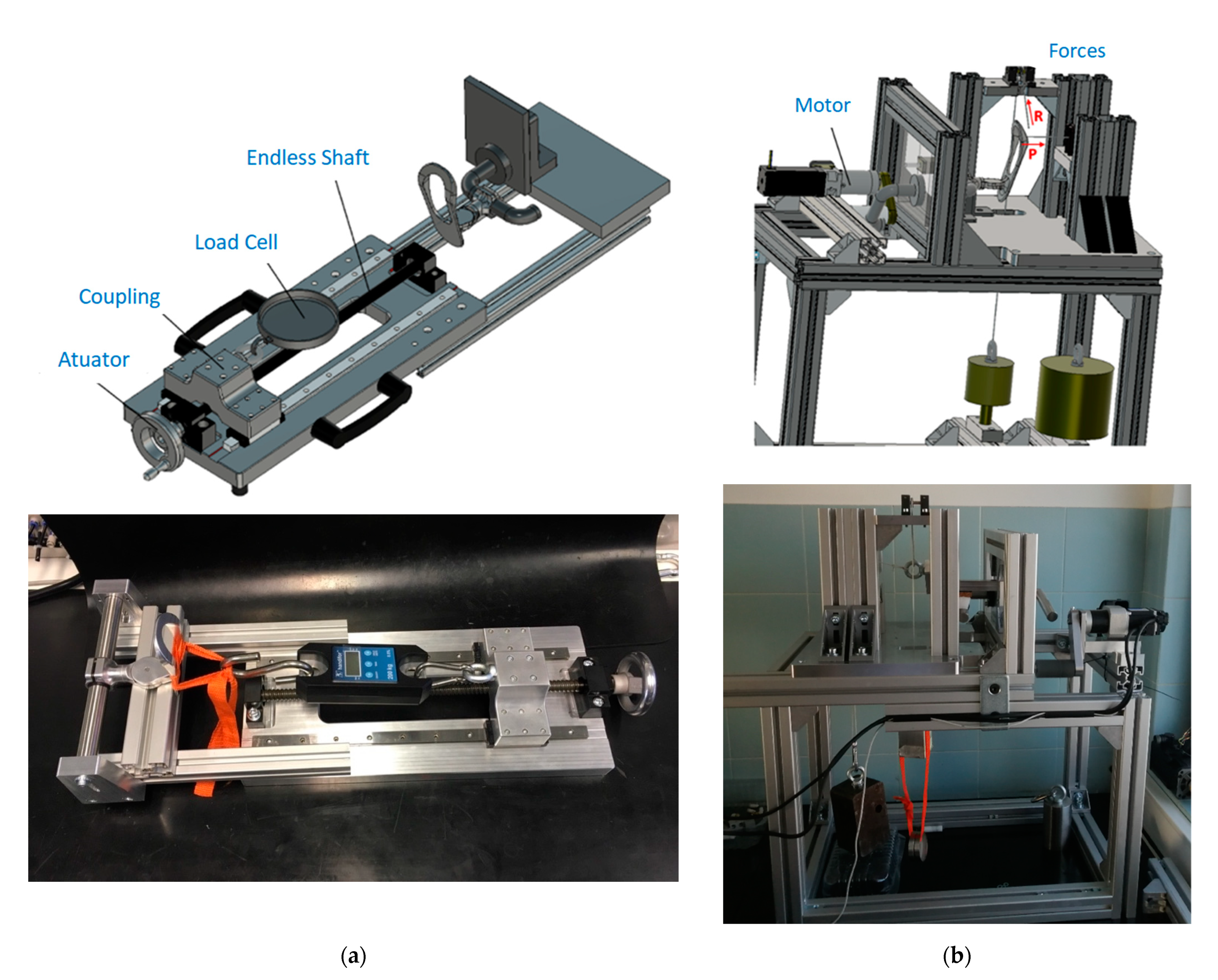
2.8. Experimental Tests
To identify the experimental behavior of the two models, dynamic and static, two sets of test equipment were developed and built, based on the NP EN 19106:2017 standard, also taking into account the numerical model. This standard is applicable to lever- and round-type handles, which activate locks and other devices, thus representing an experimental test solution for extreme conditions, given that these devices were designed to adapt to these types of handles. Although this new device does not completely fit into the scope of this standard, it was understood that these tests should be based on what is described therein.
Uniaxial traction (
Figure 12a) and durability tests (
Figure 12b, indicated by the standard) were chosen for implementation. This equipment can be visualized in
Figure 12—(a) uniaxial traction and (b) durability.
For the uniaxial traction, 1000 N was applied and maintained for a few seconds. For durability, forces P = 50 N and R = 10 N were used. The motor, which generated the knob’s rotational movement, was made to rotate at a frequency of one cycle every 2 s. The equipment was kept in continuous rotation for 111 h—that is, 4.5 days—to complete 200,000 processes. Five devices of each type were tested.
Figure 13 shows an example of the two models after the tests. On the left, in
Figure 13a, the area where a very slight gap due to wear was identified can be observed. On the right, the static device can be seen without any identification of problems.



 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}