A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET)



1
Department of Electronic Engineering, ISRA University, Islamabad 44000, Pakistan
2
Department of Electrical Engineering, AIR University, Islamabad 44000, Pakistan
3
National Physical and Standards Laboratory (NPSL), Islamabad 44000, Pakistan
*
Author to whom correspondence should be addressed.
Drones 2019, 3(1), 16; https://0-doi-org.brum.beds.ac.uk/10.3390/drones3010016
Submission received: 26 December 2018
/
Revised: 31 January 2019
/
Accepted: 2 February 2019
/
Published: 11 February 2019
(This article belongs to the Special Issue Advances in Drone Communications, State-of-the-Art and Architectures)
Abstract
:In recent years, FANET-related research and development has doubled, due to the increased demands of unmanned aerial vehicles (UAVs) in both military and civilian operations. Equipped with more capabilities and unique characteristics, FANET is able to play a vital role in mission-critical applications. However, these distinctive features enforce a series of guidelines to be considered for its efficient deployment. Particularly, the use of FANET for on-time data communication services presents demanding challenges in terms of energy efficiency and quality of service (QoS). Proper use of communication architecture and wireless technology will assist to solve these challenges. Therefore, in this paper, we review different communication architectures, including the existing wireless technologies, in order to provide seamless wireless connectivity. Based on the discussions, we conclude that a multi-layer UAV ad-hoc network is the most suitable architecture for networking a group of heterogeneous UAVs, while Bluetooth 5 (802.15.1) is the most favored option because of its low-cost, low power consumption, and longer transmission range for FANET. However, 802.15.1 has the limitation of a lower data rate as compared to Wi-Fi (802.11). Therefore, we propose a hybrid wireless communication scheme so as to utilize the features of the high data transmission rate of 802.11 and the low-power consumption of 802.15.1. The proposed scheme significantly reduces communication cost and improves the network performance in terms of throughput and delay. Further, simulation results using the Optimized Network Engineering Tool (OPNET) further support the effectiveness of our proposed scheme.
Keywords:
UAVs; FANET; drones; Bluetooth; Wi-Fi; communication architecture; wireless technologies; OPNET1. Introduction
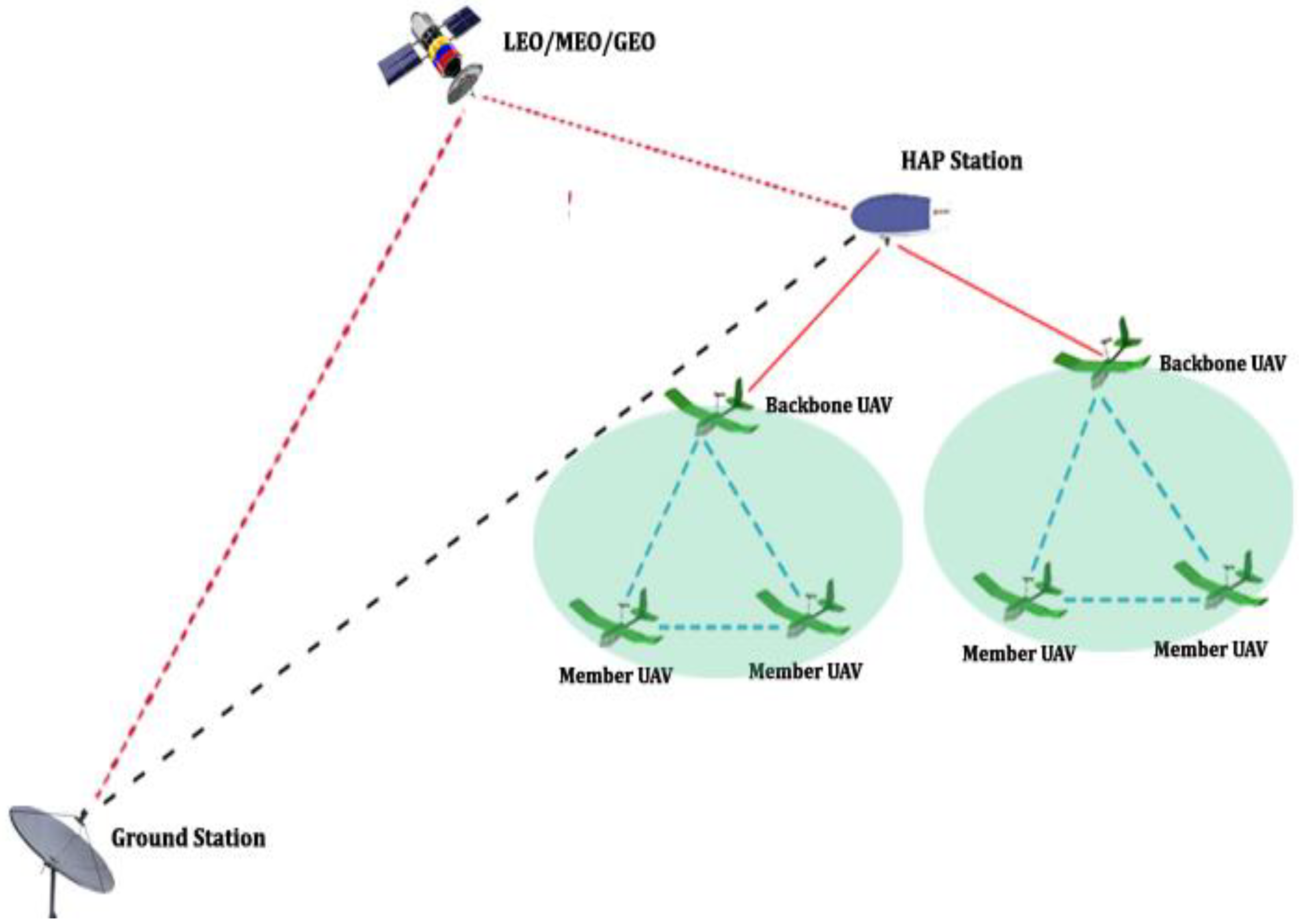
During the past couple of years, providing access anytime and anywhere to network resources has become an important challenge for FANET. Such a challenge is further agitated in mission-critical applications such as disaster recovery operations, where on-time data transmission is a prerequisite. Therefore, there exists a high demand for wireless communication technologies that can be rapidly deployed to enable data communication services with air-to-air and air-to-ground links. One possible solution for providing wireless connectivity is via high-altitude platforms (HAPs), such as balloons. The balloons generally reside on stratosphere at an altitude of about tens of kilometers above the earth’s surface, as shown in Figure 1. However, HAP-based communications are preferred for large geographical areas. On the other hand, low-altitude platforms (LAPs) have several advantages over HAPs [1], primarily in cases of disastrous events when existing communication infrastructure collapses and where it is difficult to install communication infrastructure in a short amount of time. These on-demand short-range wireless technologies can be used to provide easily deployable and reconfigurable communication services for connecting UAVs with rescue teams on the ground. Moreover, due to the low altitude of UAVs, short-range wireless links lead to substantial performance improvement over the high-altitude wireless links. In addition, performance can further be improved with jointly designed adaptive communications with a UAV mobility model. For example, when a UAV experiences good communication channel with the ground station, the speed to sustain wireless connectivity is reduced. These evident benefits make a short-range wireless system a promising solution for the low-cost deployment of the future flying ad-hoc network.
Recently, the need for various types of on-demand wireless communication technologies is increasing for the rapid, efficient, and low-cost deployment of FANET. The technology of choice should be able to support air-to-air and air-to-ground connections in an unhampered manner. It must be able to cater to a wide range of UAV applications, irrespective of significant height and orientation differences of UAVs [2]. In this context, a number of wireless technologies can be exploited for FANET, in order to execute the communication compulsion for all UAV applications. However, a pertinent question needs to be answered about the existing wireless technologies, which is whether they are able to withstand the harsh environment of aerial links or not. Secondly, the doubt behind their applicability for the real-time communication also needs to be cleared. One of the major purposes of our work is to come forth with answers to the requirements, constraints, and shortcomings of these technologies for FANET-focused communication and networking schemes.
Since wireless communication technologies are progressing at a rapid pace, UAVs with reduced size are being introduced with increased incorporation in FANET applications. Thus, the installation and maintenance of the networked communication among multiple UAVs and the ground station has emerged as a crucial task [3]. In addition, accomplishing the complex tasks, the UAVs need to assure simultaneous coordination with each other and with the ground station. For this reason, to realize a well-coordinated UAV ad-hoc network, an efficient architecture is required [4].
Inspired by the aforementioned observations, in this work, with the aim to address the communication and networking needs of FANET, we present a comprehensive review of communication architectures and wireless technologies. It has been concluded that multi-layer UAV ad-hoc network is the most suitable architecture for networking a group of heterogeneous UAVs, while 802.15.1 is the strongest candidate in short-range wireless technologies. Some of the attractive reasons behind choosing 802.15.1 are as follows: it operates in the unlicensed spectrum; it has reasonable data rates and transmission coverage; and it can be easily integrated with small UAVs. On the other hand, the transmission speed of 802.11 is higher than that of 802.15.1. For this reason, we propose a hybrid wireless communication scheme, which can utilize the strong features of each of the two options: i.e., the high-speed data transmission rate of 802.11 and the low-power consumption of 802.15.1.
The remainder of the paper is organized as follows: Section 2 presents various communication architectures for networking of UAVs with a discussion on the pros and cons; Section 3 elaborates existing communication technologies to address the communication needs of FANET; Section 4 details resource management and energy efficiency; Section 5 describes the proposed hybrid communication scheme; Section 6 presents our Optimized Network Engineering Tool (OPNET) simulation setup and performance metrics; Section 7 contains results and analysis; Section 8 concludes the work.
2. Networking Architectures
In FANET, UAVs maintain two basic functions to perform various tasks i.e., relaying UAV-to-UAV (U2U) communications and gathering network information. Besides, UAVs also perform two additional tasks: they work as remote access units to extend the coverage of infrastructures, and they can develop a dynamic network with heterogeneous resources. According to the roles performed by UAVs in a FANET architecture, two networking modes must be enabled: UAV-to-UAV (U2U) and UAV-to-Infrastructure (U2I). For this purpose, one of the UAVs is referred to as the “backbone UAV,” as it plays the role of a gateway in the FANET architecture. The backbone UAV collects data from the member UAVs (through U2U) and then relays the aggregated data to the ground station (GS) using U2I communication.
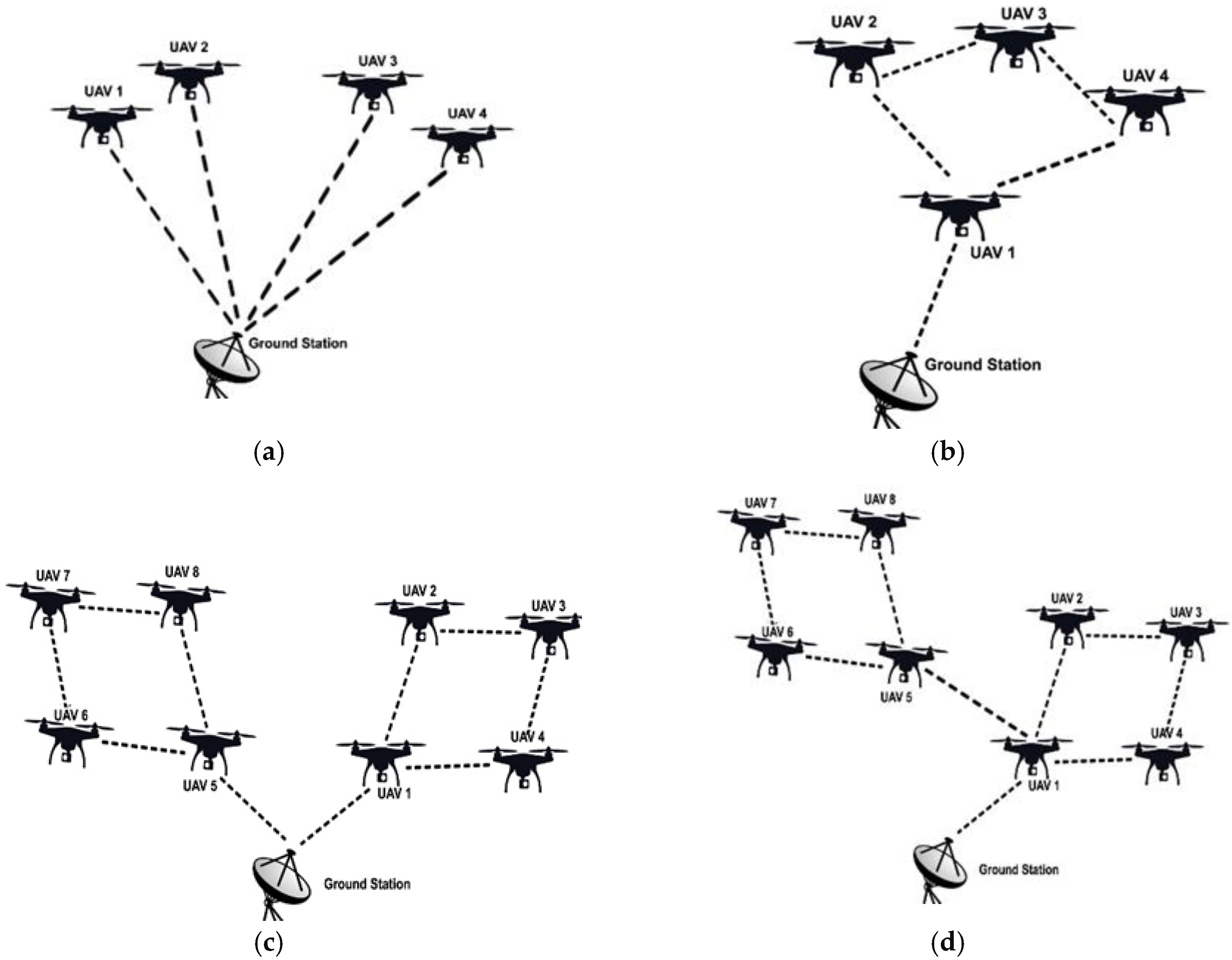
Li et al. [5] presented two types of architectures for connecting multiple UAVs, i.e., centralized and decentralized. Centralized architecture involves the ground station as a central node, and all the UAVs are directly linked to it, as illustrated in Figure 2a. Thus, data transmission between any two UAVs needs to be sent via the ground station (GS). Contrarily, UAVs can communicate directly or indirectly in the decentralized architecture without relying on a GS. The authors further introduced three types of decentralized architectures: UAV ad-hoc network, multi-group UAV ad-hoc network, and multi-layer UAV ad-hoc network. Similarly, in [6], the authors explored such architectures for the deployment of FANET. The three architectures are discussed in the following paragraphs.
2.1. UAV Ad-Hoc Network
In a UAV ad-hoc network, each UAV contributes to the data forwarding process for all the other UAV of the network, as shown in Figure 2b. The backbone UAV serves as a gateway between the GS and the member UAV in this specific architecture. The backbone UAV is normally equipped with two radios: low power short-range and high power long-range. Low power short-range radio is used for communication between the UAVs, and high power long-range radio is required to communicate with the GS. Since only one backbone UAV is connected with the GS in the UAV ad-hoc networking architecture, the coverage area by the network is substantially extended. Furthermore, as the distance between the UAV is relatively small, the transceiver mounted on the UAV can be cost-effective and lightweight, which makes it extremely attractive for small-sized UAVs. However, to make the network more persistent, the characteristics such as mobility patterns, speeds, altitudes, and heading directions of all the connected UAVs need to be similar. Therefore, such networking architecture is best suited for surveillance, monitoring operation, and other mission(s) where a small number of homogeneous UAVs are required for deployment.
2.2. Multi-Group UAV Ad-Hoc Network
A multi-group UAV ad-hoc network is, primarily, an integration of a UAV ad-hoc network and a centralized network architecture, as depicted in Figure 2c. In this architecture, UAVs within a group form an ad-hoc network, and the backbone UAV of each group is further connected to the GS in a centralized manner. Intra-group communication is performed within a UAV ad-hoc network without involving the GS, while inter-group communication is conducted via the backbone UAV. This architecture is best suited for missions where a large number of heterogeneous UAVs need to be deployed. However, this networking architecture lacks robustness due to its semi-centralized nature.
2.3. Multi-Layer UAV Ad-Hoc Network
Another architecture in the form of networking multiple groups of heterogeneous UAVs is the multi-layer UAV ad-hoc network, as illustrated in Figure 2d. In this architecture, the networking between member UAVs within a specific group form an ad-hoc UAV network, which corresponds to the lower layer of the network. The backbone UAVs of all groups are connected to each other and come under the upper layer. However, only one backbone UAV from a group is further connected to the GS. In addition, only the GS holds the information that is routed to it so as to reduce communication and the computation load on the GS. Therefore, this architecture is suitable for missions that involve a large number of heterogeneous UAVs.
In summary, a decentralized communication architecture is suitable for connecting multiple UAVs in FANET. With the help of its multi-hop schema, this communication architecture can provide extended coverage for data transmission. Moreover, the UAV ad-hoc network architecture is suitable for UAVs that are homogeneous and less in number. On the other hand, multi-group and multi-layer architectures can be deployed in situations where a large number of heterogeneous UAVs are required. In addition, a multi-layer UAV ad-hoc network may be preferred to a multi-group counterpart due to its fully decentralized nature. A multi-layer ad-hoc UAV networking architecture, furthermore, is more flexible in providing “on-the fly” communication network, chiefly due to its robustness against a single point of failure.
3. Wireless Communication Technologies
In the previous section, we focused on different networking architectures between UAVs and GS. According to the architectures presented in Figure 2, many wireless communication technologies are potential choices to provide reliable and flexible communication links for the fast deployment of FANET. A list of likely candidates that can be selected for the different links of UAV-to-UAV (U2U) and UAV-to-Infrastructure (U2I) communications is tabulated in Table 1. The table shows their main characteristics such as mobility, data rates, communication range, latency, and network topology. The choice of suitable technology depends on the nature of the application and the type of mission. However, demand for the control traffic of FANET is low and can be supported by all wireless technologies. Wireless technologies can be divided into two main categories: short-range and long-range communication technologies. Short-range communication technologies, such as Wi-Fi, ZigBee, and Bluetooth, are used for short distance communication, while the long-range communication technologies, such as cellular, WiMAX, and satellite, can be employed for larger areas. Both of the technologies are being further explored in the following paragraphs.
3.1. Short-Range Communication Technologies
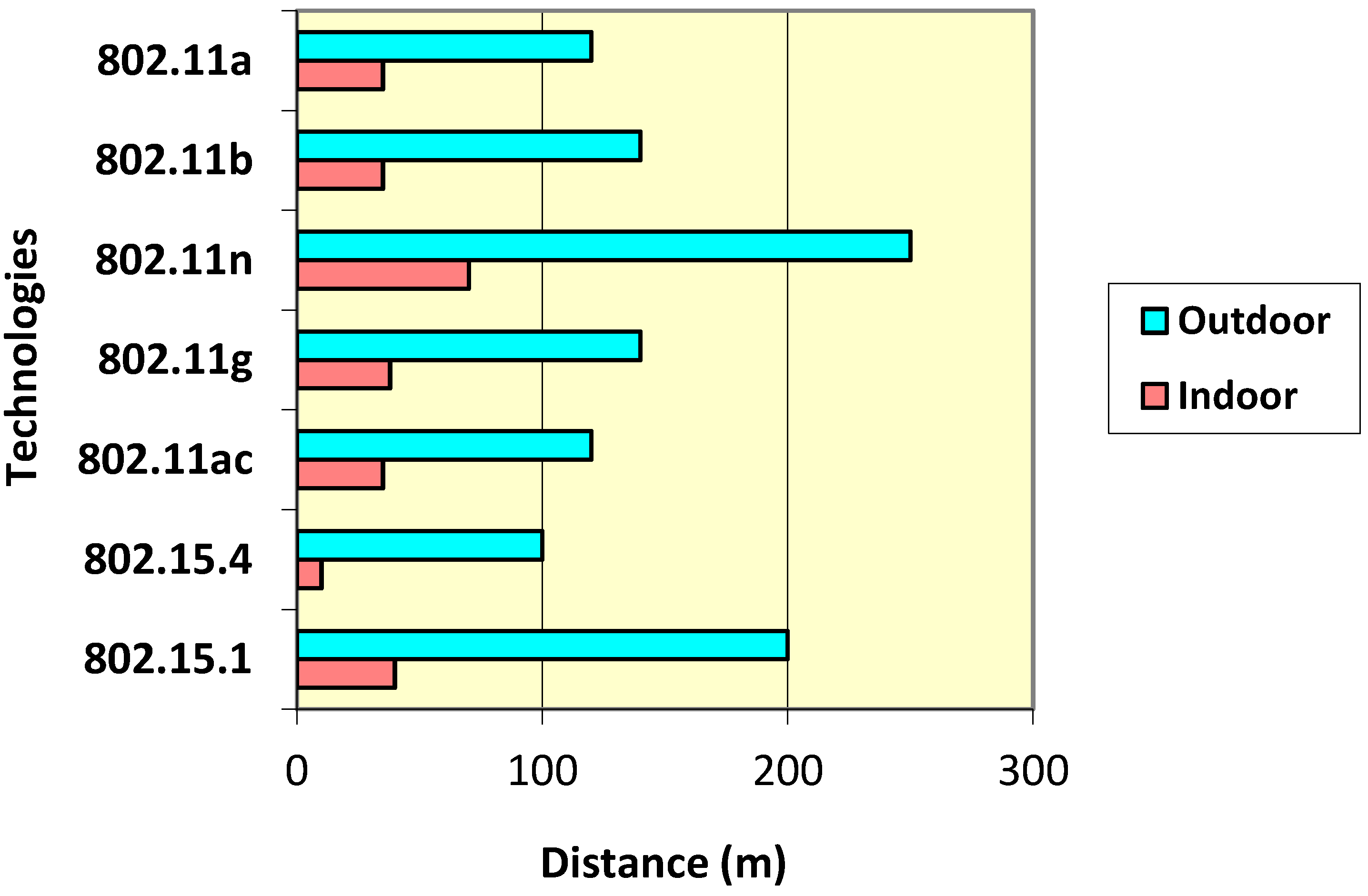
Short-range communication technologies are not only concerned with providing wireless access in the instant vicinity, but, in a broader perspective, they also offer off-the-shelf, light-weight, and cost-effective communication links due to the spectrum free bands. Short-range communication technologies offer a transfer of information from millimeters to a few hundreds of meters. The maximum indoor/outdoor distance for some of the short-range communication technologies are shown in Figure 3. Some of the major short-range communication technologies are being investigated as follows:
3.1.1. Wi-Fi (IEEE 802.11)
Wi-Fi, or Wireless Fidelity, is a short-range communication technology that consists of a set of standards for designing WLAN (Wireless Local Area Network) in the following radio bands: 2.4 GHz, 3.6 GHz, 5 GHz, and 60 GHz. To provide the throughput required for large-sized data transmissions like videos and images, variants of IEEE 802.11a/b/g/n/ac, can be the top choice for many FANET applications. The transmission range of a traditional Wi-Fi system is around 100 m. However, the transmission range can be extended up to several kilometers with the help of ad-hoc networking between the UAV. In a typical 802.11 network, clients, on the basis of announcement by access points (APs), discover and associate with wireless local area networks (WLANs) [7]. In this manner, a device behaves either as a client or as an AP. Moreover, these roles are assigned dynamically and could even be executed simultaneously by the same device. In [8], the authors investigated the performance measurement in terms of throughput, RSSI, and distance of a wireless link from UAV to GS. It is also suggested that applying an 802.11a wireless link for UAV and GS is useful for a UAV-based networking.
3.1.2. Bluetooth (IEEE 802.15.1)
Bluetooth operates in the unlicensed 2.4 GHz frequency band with a communication range of 10 to 200 m. Bluetooth technology can be found in multiple versions with a data rate ranging from 1 to 3 Mbps. However, the maximum data rate can be reached up to 24 Mbps. The Bluetooth Special Interest Group (SIG) proposed Bluetooth Low Energy (BLE) in the Bluetooth 4.0 specifications. Bluetooth 5 [9] is the latest version of the Bluetooth core specifications. Bluetooth 5 mainly focuses on improvement in speed, transmission range, energy efficiency, and co-existence with other short-range technologies. Additionally, Bluetooth 5 is also able to broadcast richer data, which extends far beyond the location information and includes multimedia and URL’s files. Considering the significant improvements, it seems like Bluetooth 5 is, in a true sense, a potential candidate for the low-cost and low-power deployment of future FANET. Asghar et al. [10] proposed a hybrid scheme using 802.15.1 for FANET. In the proposed scheme, data transmission between the member UAV was done by 802.15.1. In [11], the authors described the implementation of a wireless network platform using Bluetooth technology on a round robin scheduling algorithm. The established Bluetooth-based UAV network includes one master UAV station and up to seven slave UAV stations. The results authenticate that the proposed platform provides reliable communication with low-computational power. Hoffmann et al. [12] conducted a testbed on the basis of the same technology for multiple UAV. The testbed surfaces the way for practical employments of UAV network using Bluetooth technology.
3.1.3. ZigBee (IEEE 802.15.4)
ZigBee technology is normally used in the low data rate applications that require high battery life and secure networking. It covers a distance ranging from 10 to 100 m. Compared to Bluetooth and Wi-Fi, it is less expensive and simpler. It operates in the 2.4 GHz frequency range with a data rate of 250 kbps. It has 16 channels and each requires 5 MHz of bandwidth. In [13], the authors presented indoor localization of a quadcopter using ZigBee. The results authenticate that the localization system using ZigBee is viable, effective, and easy deployable. Jiang et al. [14] analyzed UAV landings, where ZigBee was tested for communication and position estimation. The study demonstrates, as an outcome, a significant decrease in error and an accurate estimation of the position. Zafar et al. [15] proposed a hybrid scheme where ZigBee was used for intra-cluster communication. The simulation results reveal that ZigBee can be a potential candidate for low-data-rate FANET applications.
3.2. Long-Range Communication Technologies
Long-range communication technologies can be used as a backhaul between two sights to deliver data communication services over a large distance. These technologies may also be useful for aerial vehicles to enable them communicate directly with each other (through U2U) and with the fixed infrastructure (using U2I). In the following subsection, capabilities of the existing short-range communication technologies will be examined.
3.2.1. WiMAX (IEEE 802.16)
WiMAX is a technology standard that aims to deliver broadband access over long distances in a variety of ways, ranging from point-to-point links to full mobile cellular type access. This technology is designed to accommodate both fixed and mobile broadband applications. It supports a data rate of up to 75 Mbps for the fixed applications (20 to 30 Mbps per subscriber) and for mobile applications, the data rate stretches to 30 Mbps (3 to 5 Mbps per subscriber) [16]. WiMAX is developed to provide high-quality voice and video streaming while maintaining the desired quality of service (QoS). With reference to UAV, WiMAX is considered the most appropriate technology for UAV-based rescue systems in hostile environments [17]. In [18], the authors provided methodology for network planning in terms of the number and position of UAVs. Simulation results demonstrate the likelihood of calculating the dimensions, i.e., the position and altitude, of each UAV and guarantee a certain QoS using WiMAX.
3.2.2. Long-Term Evolution (LTE)
LTE offers secure wireless connectivity, mobility, and a high data rate, which can considerably enhance control and safety beyond visual line-of-sight (LOS) use cases. LTE is optimized for IP with scalable bandwidths of 20 MHz, 15 MHz, 10 MHz, and less than 5 MHz. It supports both frequency division duplexing (FDD) (paired) and time division duplexing (TDD) (unpaired) spectrums. The optimum cell size is 5 km, even though it can attain a reasonable performance within 30 km and provide an acceptable performance up to 100 km. Not surprisingly, utilizing an established LTE network for UAVs have seen a surge of activities in the last three years. In [19], low altitude UAVs are connected through LTE. The work points out that the existing mobile LTE network can boost network performance in UAV-based disaster response scenarios. Qazi et al. [20] demonstrated the effectiveness of UAV-based real-time video streaming and surveillance over the 4G-LTE system. The study investigates the performance of the network in relation to the physical aspects of wireless propagation using Network Simulator-3. Similarly, in [21], the authors considered two scenarios in which UAVs either work as a base station transmitting in the downlink or as user equipment transmitting in the uplink using LTE network. The work spotlights that the present LTE network does require important modifications for a smooth integration of LTE-enabled UAVs. Nguyen et al. [22] also investigated the performance of aerial radio connectivity in a rural LTE network. The results show that some practical and relatively low complex mitigation schemes of interference have good potential for deployment in a rural LTE network.
3.2.3. Fifth Generation (5G)
Following 2G (GSM), 3G (UMTS), and 4G (LTE/WiMAX), fifth generation, or 5G, is the latest generation of cellular mobile communication. Its prominent features include a high data rate, reduced latency, energy saving, enhanced system capacity, and ubiquitous connectivity. The International Telecommunication Union (ITU) foresees the launch of 5G mobile networks by 2020. Such systems will have, per user, a speed of 100 GB/s with a capacity stretching as much as 1000 times [23]. Owing to such features, 5G technology is poised to play a critical role in UAV communication systems and, thus, pave ways for novel applications. For instance, in the case of UAVs in a 5G environment, less dynamic network segments of the FANET architecture could be interconnected with the core network. This will ease the provision of services such as surveillance multimedia streaming. The requirement of backhauling for seamless connectivity, however, still eclipses the inherent clarity of UAVs in a 5G network [24,25,26]. Actions such as connecting UAVs with a base band unit (BBU) and involving a macro-cell base station (MBS) do ensure fulfillment of the backhauling requirement. Further, the connectivity does vary depending on the factors related to service provision and network planning. In [27], the authors proposed a multi-layer hierarchical architecture with distributed features that smoothly enables the integration of UAVs with next-generation wireless communication networks. Moreover, authors in [28] provided an overview on some of the recent research endeavors in UAV communication systems that addresses 5G techniques from the perspectives of the physical layer, the network layer, and joint communication, computing, and caching. The case where UAVs carry base stations (BSs) for providing 5G network connectivity in rural settings is explored in [29].
3.2.4. Satellite Communication (SATCOM)
SATCOM is used for sending electromagnetic signals from ground stations to space stations, or satellites, and vice versa. In SATCOM, various frequency bands are used by different satellites. C-Bands, which are still tied up with some systems, utilize an uplink band of 6 GHz and a downlink band of 4 GHz. X-Bands, on the other hand, which are normally used by the military and governmental systems, use 8 GHz for uplink and 7 GHz for downlink. The so-called Ku-Bands, operates on 14 GHz for uplink and 11–12 GHz for downlink. Moreover, these bands are also becoming saturated; therefore, Ka-Bands are evolving to be implemented with the time. Ka-Bands work on a 30 GHz uplink and a 20 GHz downlink. In [30], the authors studied key specifications such as satellite downlink, UAV uplink transmission power, and the image transmission rate. It was specified that satellite relay achieves a larger overlay range and provides a large-coverage image transmission with a high image-quality. Additionally, in [31], the authors highlighted the main problems behind applying SATCOM for live image and video transmissions with the help of micro and mini UAS. The two major issues are inadequate bandwidth and a high cost of data transmission.
From the above discussion, it can be concluded that short-range communication technologies like Bluetooth, ZigBee, or Wi-Fi may be considered for medium-range FANET applications based on the range and throughput requirements. However, if the coverage area is large and these short-range technologies are not able to support the required throughput demands, long-range communication technologies such as WiMAX, LTE, 5G, and SATCOM may be far more appropriate.
In summary, based on the transmission characteristics, we consider short-range communication technologies for our proposed scheme. There are valid reasons for choosing these technologies: they operate in the unlicensed spectrum; they do not require strict LOS; and they offer a reasonable data rate and coverage. Moreover, they can be easily integrated with small UAV. Moreover, due to the significant improvements in speed, power consumption, capacity, and coverage, Bluetooth 5 is the best option amongst the aforementioned short-range wireless technologies. However, in order to utilize the best features, Wi-Fi is integrated with Bluetooth 5 in our proposed approach.
4. Resource Management and Energy Efficiency
Limited on-board energy is one of the major limitations that hinders the potency of a UAV system. However, consideration of two important factors, i.e., energy-efficient deployment and energy-efficient operations, can pave ways for resolution. Energy-efficient deployment means interruption-less utilization of power reserves. Energy-efficient operations stipulate measures aimed at achieving the objectives with minimal on-board power. One way to achieve energy-aware deployment is to harness inter-UAV cooperation such that, at any given time, only one UAV can abandon its mission to top up its power reserves [32]. In the literature, the topic of energy efficiency and resource management has been consulted from various angles. For instance, in [33], the authors propose an analytical framework aimed at finding the optimal trajectory, which can minimize the energy consumption of a fixed-wing UAV. Energy efficiency is addressed by a scheduling framework for cooperative UAVs communication in [34]. In [35], the authors studied the energy efficiency of drones in target tracking scenarios by adjusting the number of active drones. Besides, a drone-assisted strategy is proposed in [36], which entails harnessing LoRaWAN architecture and the smart deployment of drones for energy conservation. In [37], an energy-efficient system is proposed for the drones to collect sensor data. The issues of data dissemination and energy conservation are addressed by a firefly optimization algorithm. Supported by acceptable modelling, simulation, and numerical results, a self-adaptive energy-efficient operation in UAV-assisted public safety networks is suggested in [38]. The authors in [39] investigated, for small UAVs, energy harvesting from vibrations and solar sources. Optimization of transmission time in a user–UAV communication set-up is proposed in [40]. This resulted in the maximization of the user’s minimum throughput. Utilization of an antenna array on UAVs is investigated in [41] in order to improve SNR and reduce transmission power. A flying access point equipped with an energy harvesting mechanism is investigated in [42] with the objective of optimal resource allocation. UAVs servicing ground users face bandwidth and flight-time optimization problems, which is addressed in [43]. A resource allocation framework is proposed in [44] that enables cache-enabled UAVs to effectively service users over licensed and unlicensed bands.
Undoubtedly, the area of energy efficiency and resource management demand insightful consideration since it affects the performance of FANET systems in terms of throughput and end-to-end delay.
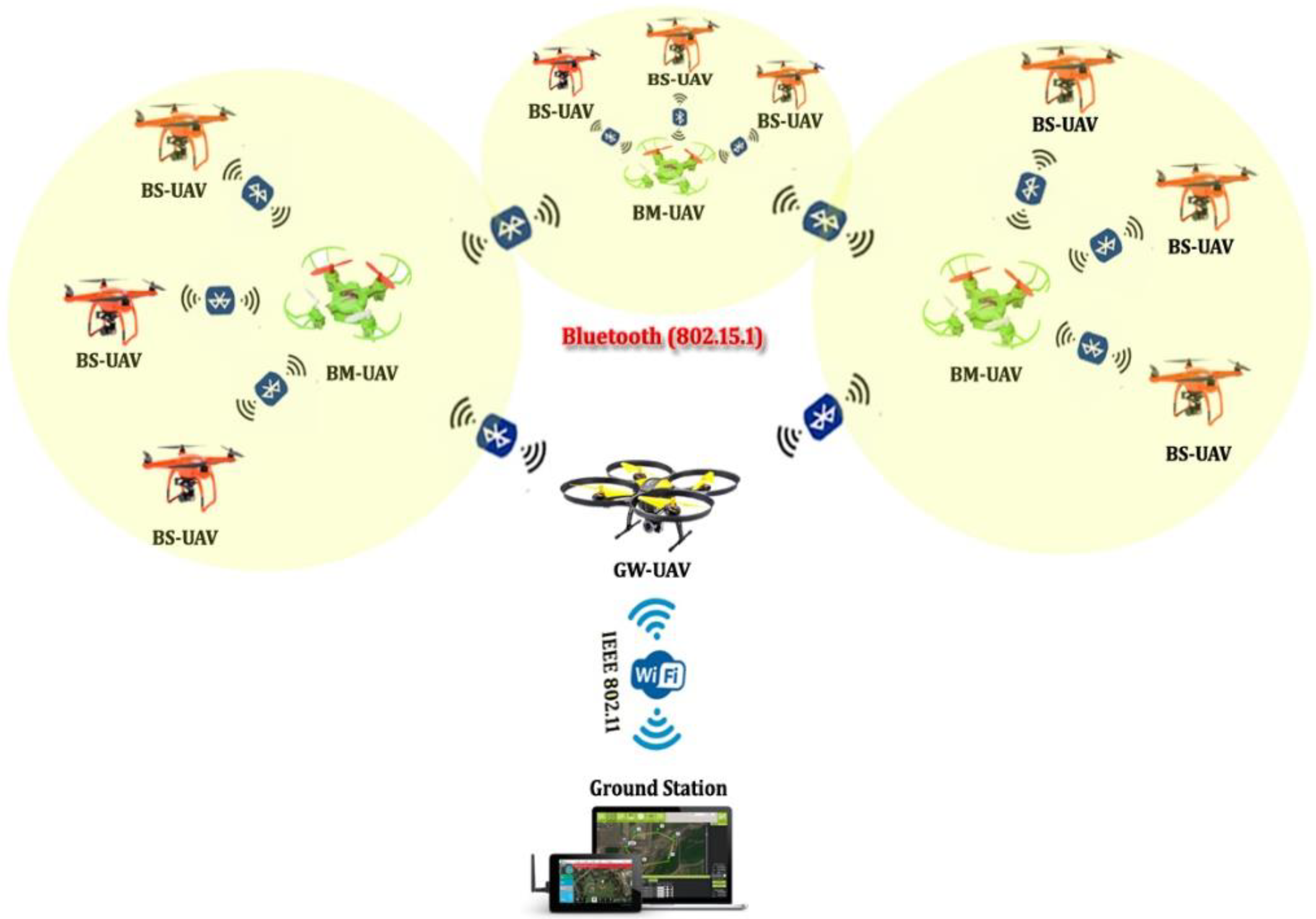
5. The Proposed Hybrid Scheme
In the proposed hybrid scheme, two key short-range communication technologies, Wi-Fi (802.11) and Bluetooth (802.15.1), are interconnected. The major reason behind designing such a scheme is to utilize the strong features of both of the technologies so as to attain features such as low-cost, low-power, high range, and high speed. We consider multiple representative classes of UAV: Bluetooth slave (BS), Bluetooth master (BM), and Gateway (GW). At first, with the help of beacon signals, discovery function is performed to establish a connection between the associated UAV. Once the connection is established, data are transferred among the BM-UAV and BS-UAV using 802.15.1, while the data communication between the GW-UAV and GS is established through 802.11. Further details of the proposed scheme are given in the following subsections.
5.1. UAV Station Model
All UAVs carry a global positioning system (GPS) and an inertial measurement unit (IMU) to uninterruptedly monitor the position and location of neighboring UAVs in the proposed scheme. The position and location of UAV are then updated in the medium access control (MAC) table.
5.2. Mobility Model
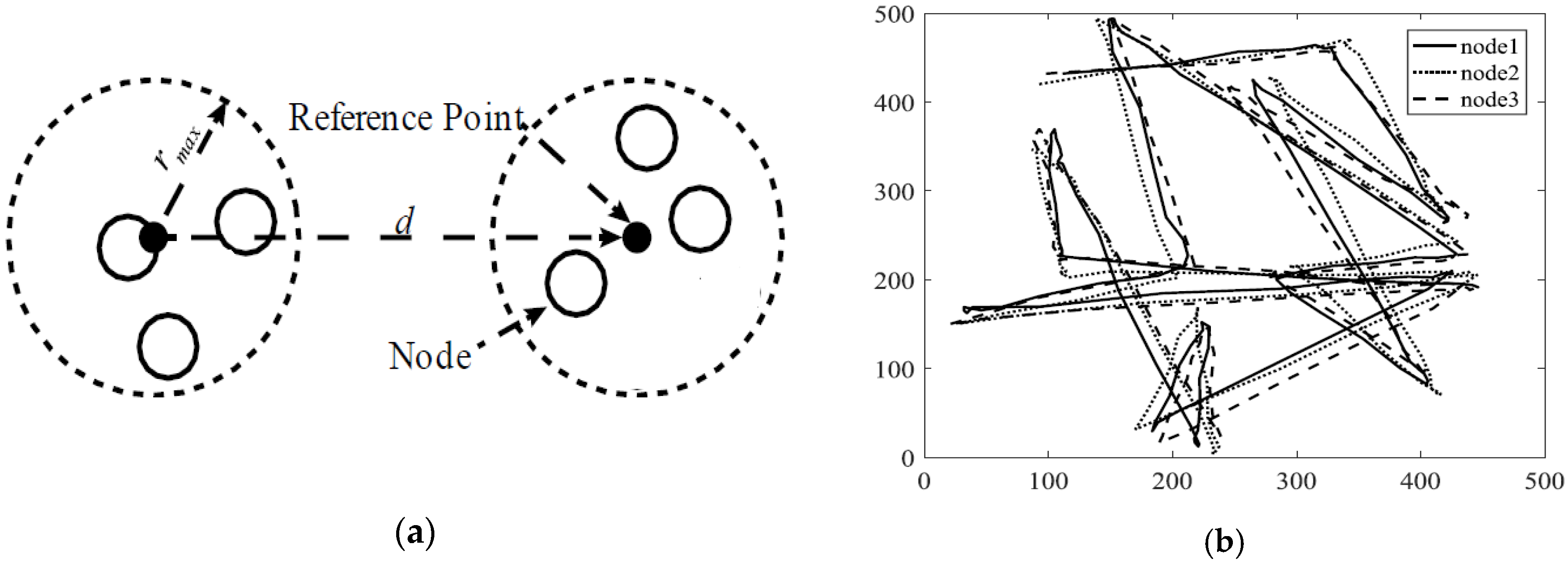
Mobility models are commonly used to analyze newly designed schemes or protocols in both cellular and ad-hoc networks. In FANET, the choice of suitable mobility model is essential to obtain results with maximum precision and conformity due to the agile motion of UAVs. In this context, mobility models are classified into five classes: purely randomized, time-dependent, path planned, group, and hybrid [45]. In order to patrol a specific region, there are many situations where a group of UAVs move together following a common point in the FANET system. For this reason, we used reference point group mobility (RPGM) [46] to simulate a group of UAVs in the proposed scheme. In the RPGM model, UAVs are grouped to achieve a collective task by moving together around a logical reference point, i.e., a group leader. The behavior of the reference point’s motion defines the entire group’s motion including location, altitude, speed, and direction. Usually, UAVs are uniformly distributed within the geographic scope of a group. The group leader follows a random waypoint (RWP) mobility model, and other UAVs will be moving around the center with their own mobility pattern (see Figure 4b) [47]. This mobility model has numerous variants, such as column (CLMN) [47], nomadic community (NC) [47], and purse (PRS).
In the proposed scheme, BM-UAV of each group is located at the reference point. The altitude, speed, and direction of BS-UAV depend on such a reference point. Moreover, the location of BS-UAVs is updated according to the BM-UAV.
5.3. Propagation Model
In our proposed scheme, the FANET system consists of n UAVs, where n ≥ 2, and each UAV is equipped with both the radios i.e., 802.15.4 and 802.11 with dual-band capability. Two techniques, path loss and fast fading, can be used to model a wireless link between two UAVs. Attenuation of the radiated power affects path loss. On the other hand, fading results due to the multipath effect of low altitude UAV propagation. Path loss can be expressed mathematically as follows between the transmitter and receiver [48]:
where λ is the wavelength of the transmitted signal and can be represented as the ratio of the speed of light c to the carrier signal f: λ = c/f, while d is the distance between transmitting and receiving UAVs, and d0, i.e., 8 m, is the length of the LOS. However, we employ a free space propagation model in our proposed scheme. The reason for selecting this model is that we assume a clear LOS between sender and receiver UAVs. The well-known Friis equation [49] is given, as it can express this model mathematically:
where the alphabet P represents power and G denotes gain; the subscripts t and r stand for “transmitted” and “received,” respectively. Moreover, the symbols θt and Фt are used for elevation angle (range: 0–180°) and azimuth angle (range: 0–360°), respectively. Further, λ is the wavelength of the transmitted signal, and d equates to the distance between the transmitting and receiving antenna. We set the receiving antenna gain Gr (θr, Фr) = 1 in Equation (3), and we can write received power as
Taking logarithm on both sides of Equation (4), we have
where Pl (dB) represents the free-space path loss and is given by
Pr (dBw) = Pt (dBw) + Gt (dBi) − Pl (dB)
5.4. Application Scenarios and Architecture
In this subsection, we describe the possibility of integrating our proposed scheme with the FANET application scenario. In order to deploy FANET in different application scenarios, the UAV can be equipped with cameras, data storage, sensors, an IMU, a GPS unit, and other embedded devices such as a flight controller, on-board processing units, and short-ranged radio transceivers (i.e., Bluetooth and Wi-Fi). In surveillance applications, such as patrolling a specific region, UAVs play an important role in minimizing human involvement. These missions involve information collection from battlefield to earthquake regions. Surveillance tasks may include collecting images and video streaming from the mission area. In our proposed system, the mission area is divided into zones, where a multi-layer UAV ad-hoc architecture is deployed as shown in Figure 5. In this architecture, multiple groups of heterogeneous UAVs are placed in different zones. The lower layer is used for communication between the BM-UAV and GW-UAV, while the upper layer is concerned with communication between the BM-UAV and BS-UAV. The GW-UAV will be further connected with the ground station. The ground station only holds the information, which is exclusively routed to it, thus reducing the computation costs on the ground station.
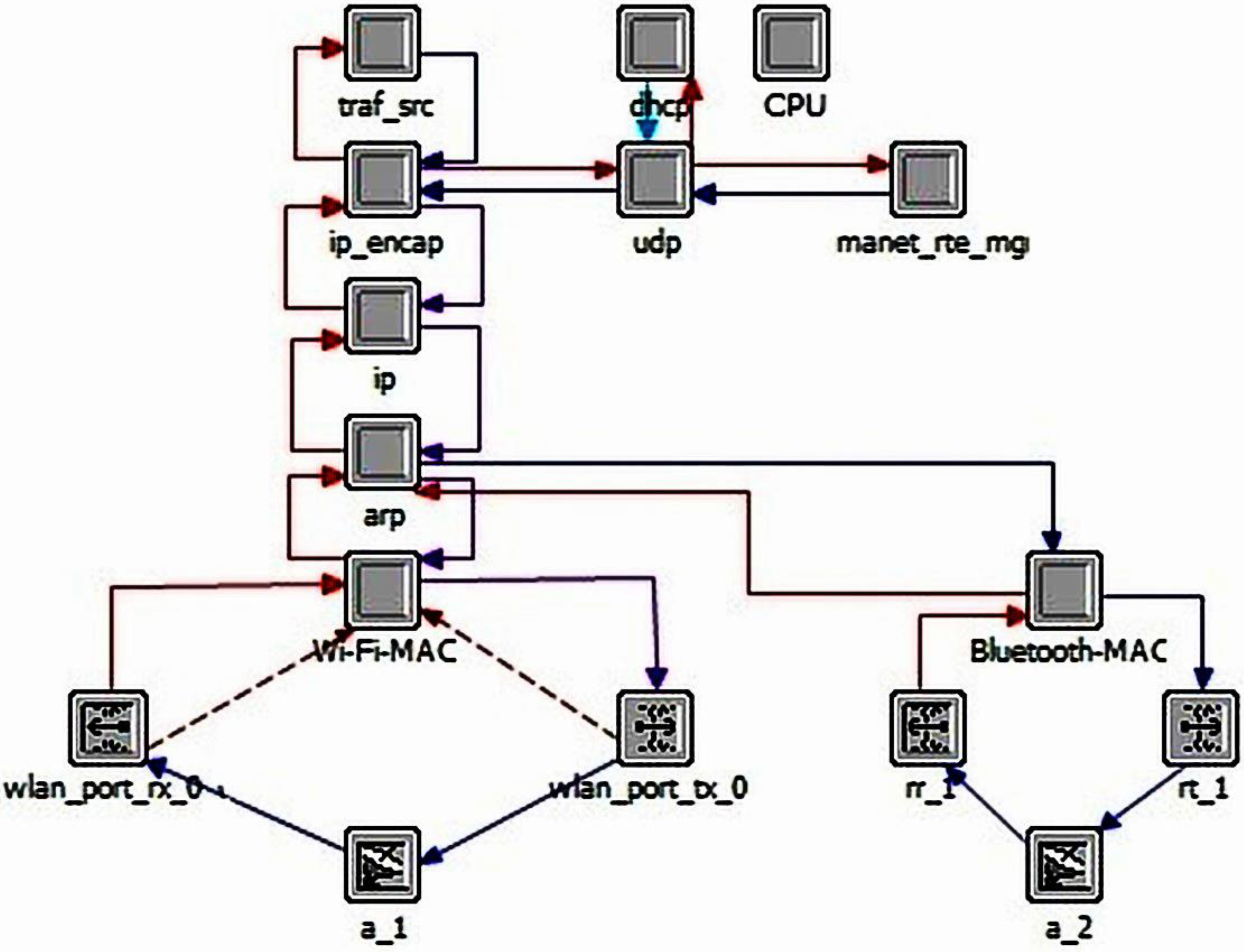
6. Simulation Setup and Performance Metrics
6.1. Simulation Setup
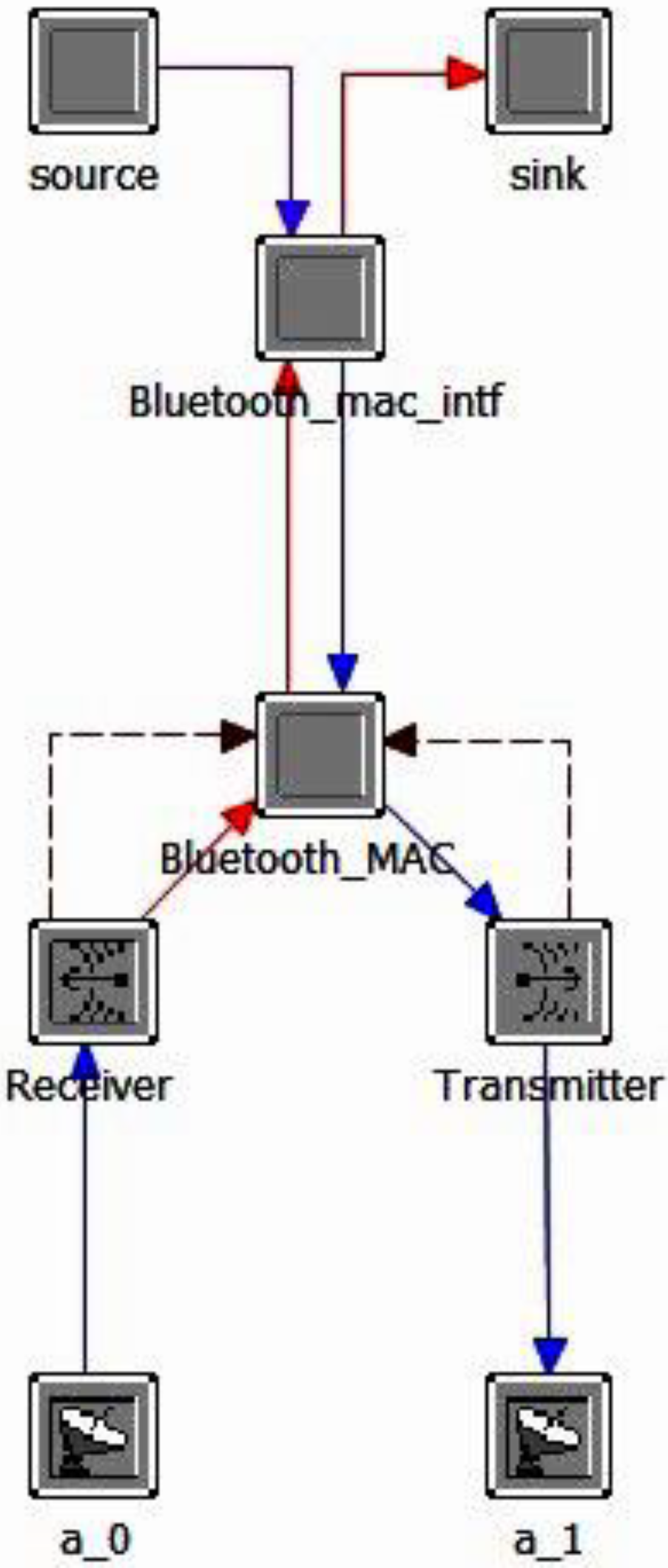
The proposed scheme is designed and implemented by the OPNET. The node model of the MANET node is modified for GW-UAV in the node editor, as shown in Figure 6. To register the MAC addresses, the Bluetooth connection is established through the address resolution process (ARP) model in the GW-UAV. Figure 7 shows the node model for both BM-UAV and BS-UAV. Even though the node models of BS-UAV and BM-UAV seem similar, they act differently. Their working is implemented in the function block of the process model editor. The BM-UAV module process schedules asynchronous connectionless (ACL) and synchronous-connection oriented (SCO) transmissions to the BS-UAV. BS-UAV transmit data only if it receives a packet from its BM-UAV.
6.2. Performance Metrics
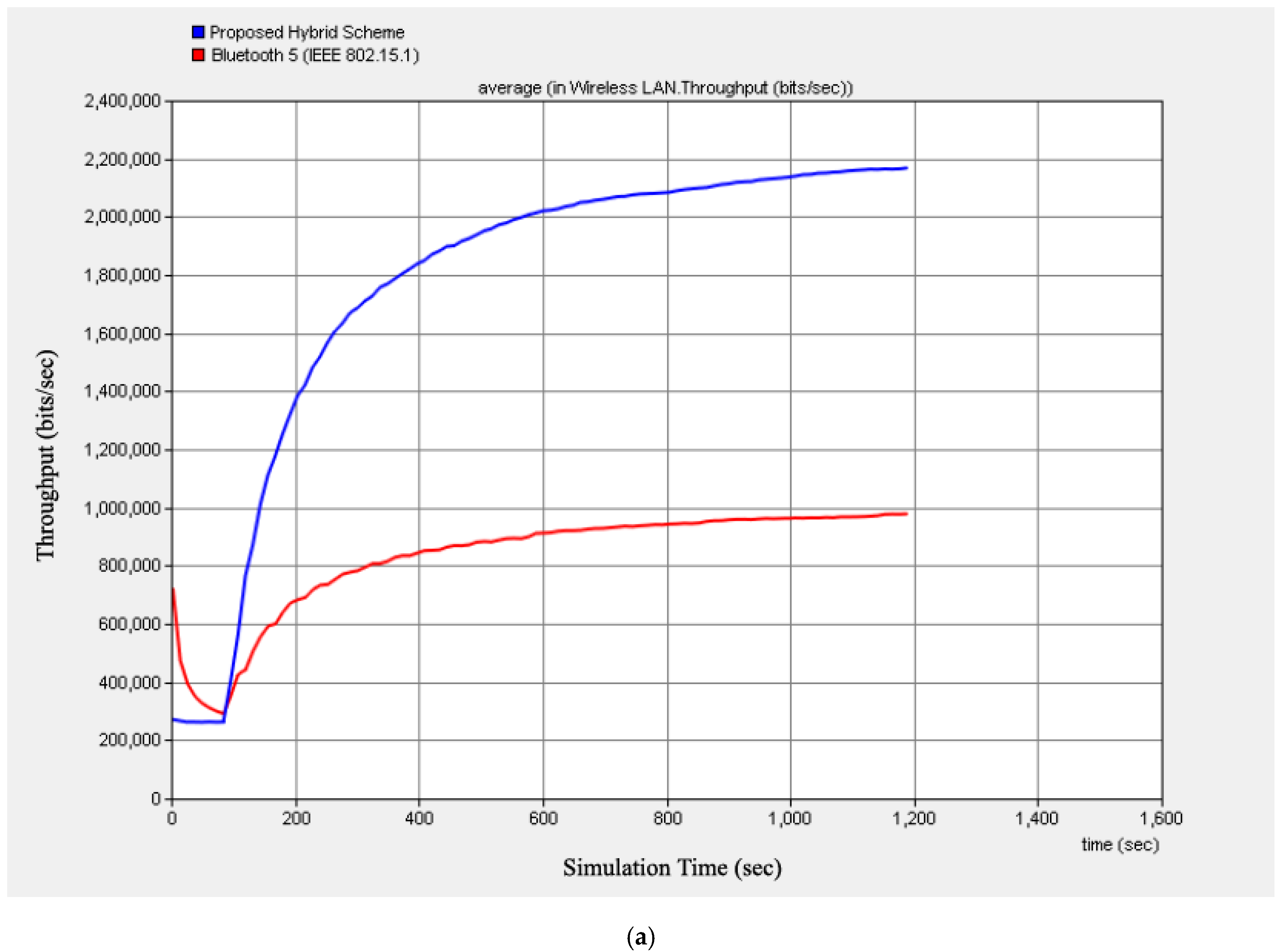
6.2.1. Throughput (bits/s)
Throughput is the amount of successful transmissions over a communication link in a particular unit of time. Higher throughput is the requirement and characteristic of any network. In the proposed scheme, average throughput is measured across the network. A throughput variation graph using the OPNET is also presented in order to demonstrate the consistency of the proposed approach. Mathematically, throughput can be determined using the following equation:
where N is assumed to be the number of successful packets transferred, S is the size of the packet, and T is the time duration.
6.2.2. Delay (s)
Delay refers to the amount of time a signal takes across the network from a source UAV to a destination UAV. Delay is a key factor for measuring the performance of a communication network. The model aims to limit the delay by facilitating direct communication between the UAV and with the ground station. End-to-end delays are comprised of processing, queuing, and transmission delay of the link in a network. Mathematically, the average end-to-end delay can be shown with the help of Equation (8):
where Tt is Transmission time, Rt is retransmission time, Bt is buffer time, and Prt is processing time.
7. Results and Analysis
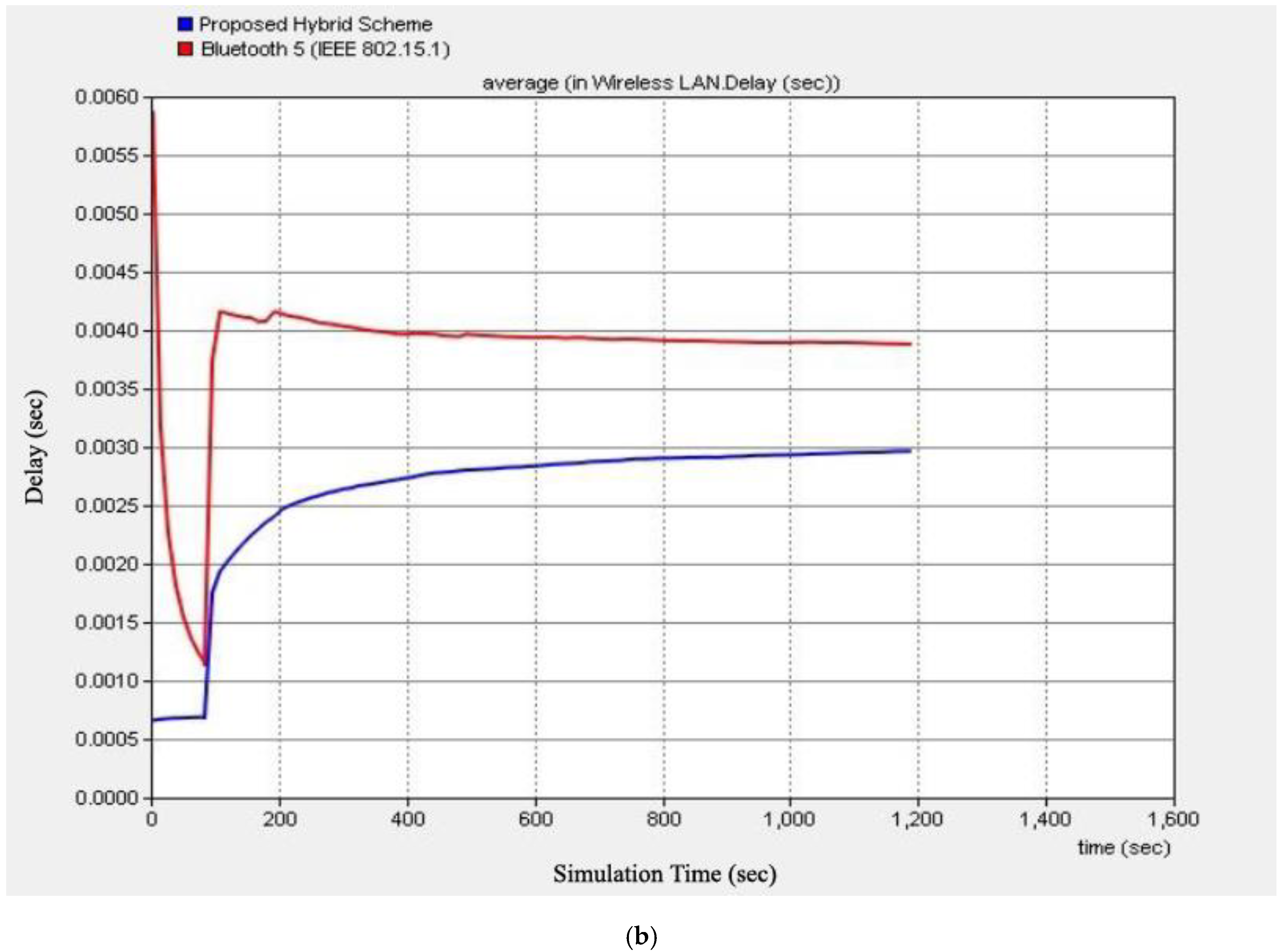
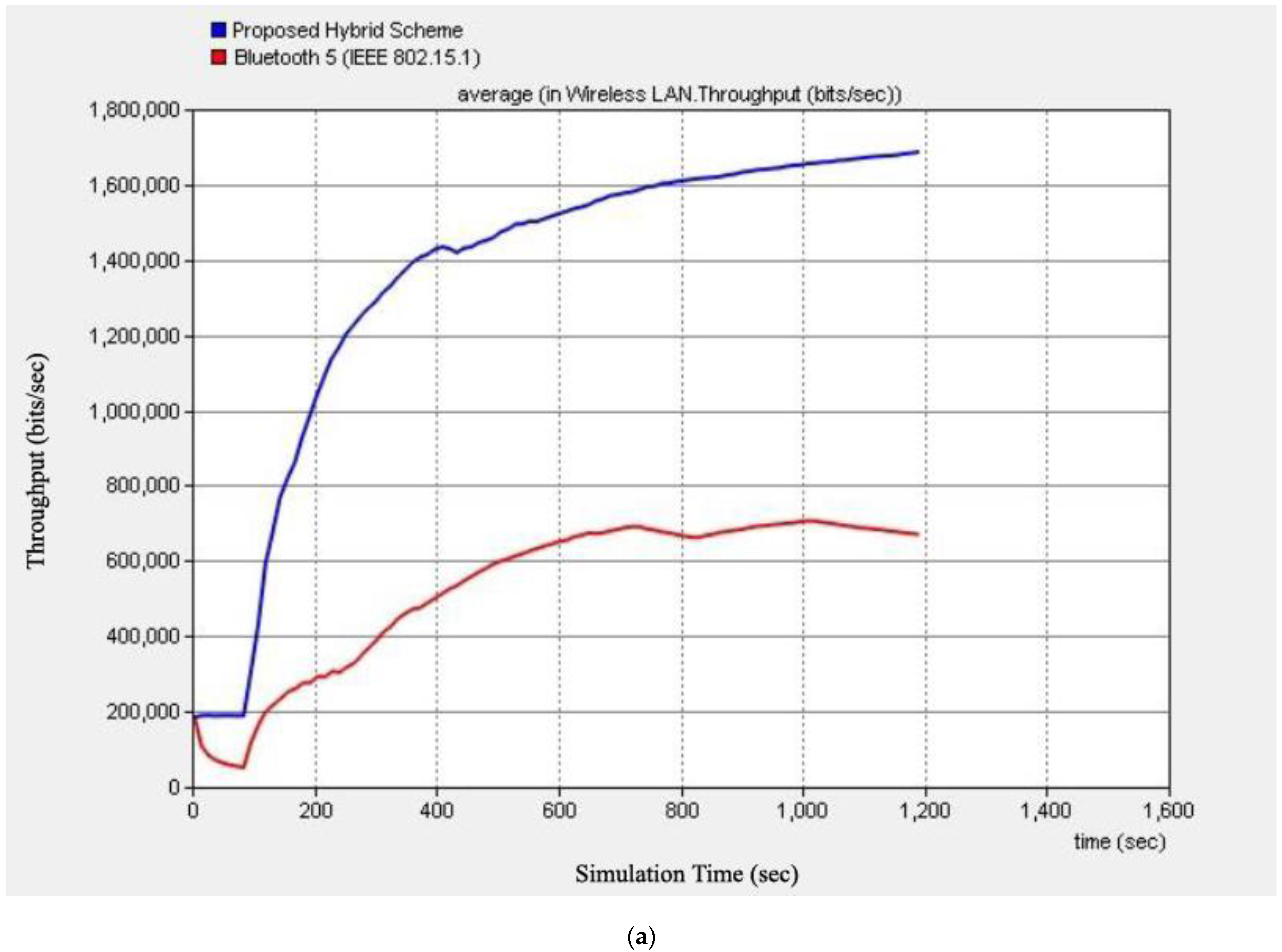
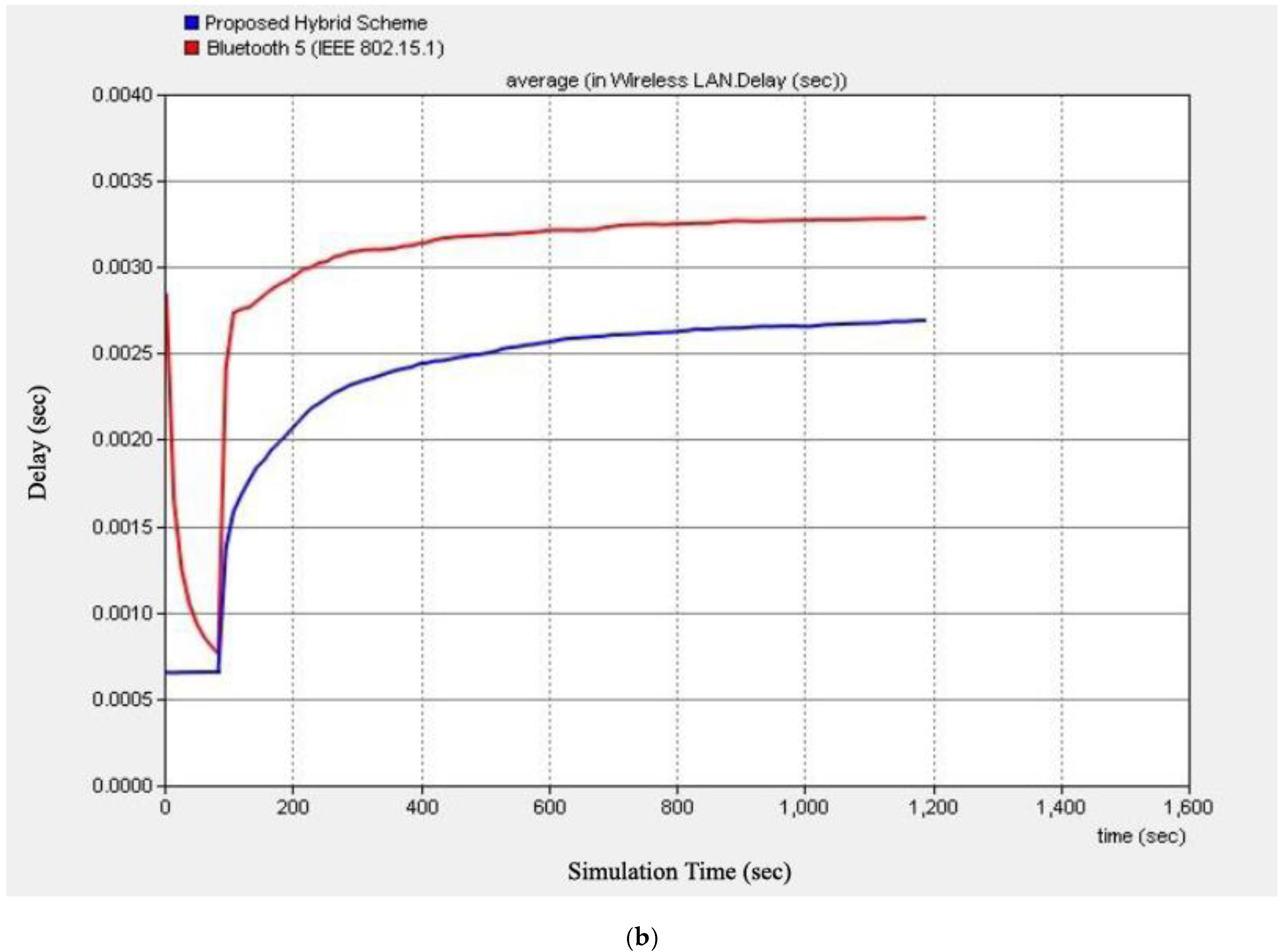
Figure 8a,b and Figure 9a,b illustrate the performance of FANET in terms of throughput and end-to-end delay under RPGM and RWP mobility models, respectively. In the graphs, the x-axis indicates the simulation time, in seconds, and the y-axis specifies the throughput and delay, in bits per second. The proposed scheme was tested on an area of 1 × 1 km with 42 UAVs. Seven zones were considered with each comprised of 6 UAVs. Five among the six UAVs were equipped with 802.15.1, while one UAV carried both 802.11 and 802.15.1 radios. Simulation were carried out for two different scenarios in order to emulate a group of UAVs under both RPGM and RWP. Table 2 depicts the remaining parameters along with respective values. From our simulation results, it is evident that the desired QoS requirements are met by the proposed scheme. That is, it provides significant performance improvements compared to IEEE 802.15.1 in terms of throughput and end-to-end delay (Figure 8a,b). At the beginning stage of the connection, there is no great difference between Bluetooth and the proposed scheme. The data transmission speed of Wi-Fi is relatively low due to the long connection establishment time of Wi-Fi technology. As a result, the proposed hybrid overcomes the shortcomings of a long initial connection setup time of Wi-Fi as well as a low transmission speed of Bluetooth. Moreover, a slight decline was observed in network performance, particularly in reference to throughput and end-to-end delay under RWP mobility model (Figure 9a,b). It can be observed from Figure 8a,b that RPGM provides higher throughput and minimum end-to-end delay for both IEEE 802.15.1 and the proposed hybrid scheme compared to × RWP mobility model (Figure 9a,b). This is because the movement of UAVs under the RPGM model is governed by defining a specific trajectory around a reference point, i.e., the group leader. Thus, the network is in a fully connected state most of the time.
8. Conclusions and Future Remarks
In order to pave ways for smart services, FANET needs to promise uninterrupted wireless connectivity in a ubiquitous fashion. An apparent outcome is the emergence of new possibilities in the form of rapid, efficient, and low-cost deployment of future flying ad-hoc networks. In this context, we explored different architectures and wireless technologies that can be used in the communication links between UAV and the ground station. We also proposed a hybrid wireless communication scheme in order to employ the low-power consumption feature of Bluetooth (802.15.1) and the high data transmission rate capability of the Wi-Fi technology (802.11). The proposed scheme was designed, implemented, and simulated with the OPNET. The simulation results, in terms of throughput and delay, demonstrated the viability of our scheme for FANET. Our research contribution is hoped to enable researchers and engineers to explore more avenues for coming forth with improved UAV wireless communication systems. For instance, the proposed hybrid scheme does not cater to the backhaul link for the FANET system. Existing FANET system(s) mainly rely on simple point-to-point communication over the unlicensed band (e.g., ISM 2.4 GHz). Such an unlicensed band is of a low data rate and operates over a limited range. The number of UAVs and their associated applications are poised to grow in the near future. This further stresses the need to develop new hybrid schemes such as WiMAX, LTE, and 5G at the backhaul to enable enhanced UAV–ground communications.
Author Contributions
Conceptualization, M.A.K.; Methodology and Implementation, M.A.K. and I.M.Q.; Simulation, M.A.K.; Validation, M.A.K.; Data Curation, I.M.Q.; Writing—Original Draft Preparation, F.K. and M.A.K.; Writing—Review & Editing, F.K. and M.A.K.; Supervision, I.M.Q.
Funding
This research received no external funding.
Acknowledgments
A part of this paper was published in Proceedings of the 2nd International Conference on Future Networks and Distributed Systems (ICFNDS ’18), Amman, Jordan, 26–27 June 2018.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zeng, Y.; Zhang, R.; Teng, J.L. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Networking models in flying Ad-hoc networks (FANETs): Concepts and challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Sharma, V.; Kumar, R. Cooperative frameworks and network models for flying ad hoc networks: A survey. Concurr. Comput. Pract. Exp. 2017, 29, e3931. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Y.; Lamont, L. Communication architectures and protocols for networking unmanned aerial vehicles. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1415–1420. [Google Scholar]
- Khan, M.A.; Qureshi, I.M.; Safi, A.; Khan, I.U. Flying Ad-Hoc Networks (FANETs): A Review of Communication architectures, and Routing protocols. In Proceedings of the 2017 First International Conference on Latest Trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 15–16 November 2017; pp. 692–699. [Google Scholar]
- Joh, H.; Yang, I.; Ryoo, I. The internet of everything based on energy efficient P2P transmission technology with Bluetooth low energy. Peer-to-Peer Netw. Appl. 2015, 9, 520–528. [Google Scholar] [CrossRef]
- Cheng, C.-M.; Hsiao, P.-H.; Kung, H.T.; Vlah, D. Performance measurement of 802.11a wireless links from UAV to ground nodes with various antenna orientations. In Proceedings of the 15th International Conference on Computer Communications and Networks, Arlington, VA, USA, 9–11 October 2006; pp. 303–308. [Google Scholar]
- Bluetooth Core Specification, Bluetooth Special Interest Group (SIG). 2016. Available online: https://www.bluetooth.com/specifications/bluetooth-core-specification (accessed on 6 October 2018).
- Khan, M.A.; Khan, I.U.; Qureshi, I.M.; Alam, M.K.; Shah, S.B.; Shafiq, M. Deployment of reliable, simple, and cost-effective medium access control protocols for multi-layer flying ad-hoc networks. In Proceedings of the 2nd International Conference on Future Networks and Distributed Systems (ICFNDS ’18), Amman, Jordan, 26–27 June 2018; p. 49. [Google Scholar]
- Afonso, J.A.; Coelho, E.T.; Carvalhal, P.; Ferreira, M.J.; Santos, C.; Silva, L.F.; Almeida, H. Distributed sensing and actuation over Bluetooth for unmanned air vehicles. In Proceedings of the International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006. [Google Scholar]
- Hoffmann, G.; Rajnarayan, D.G.; Waslander, S.L.; Dostal, D.; Jang, J.S.; Tomlin, C.J. The Stanford testbed of autonomous rotorcraft for multi agent control (STARMAC). In Proceedings of the 23rd Digital Avionics Systems Conference (IEEE Cat. No.04CH37576), Salt Lake City, UT, USA, 28 October 2004. [Google Scholar]
- Yut, L.; Fei, Q.; Geng, Q. Combining Zigbee and inertial sensors for quadrotor UAV indoor localization. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; pp. 1912–1916. [Google Scholar]
- Jiang, Y.; Cao, J.; Du, Y. Unmanned air vehicle landing based on Zigbee and vision guidance. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 10310–10314. [Google Scholar]
- Zafar, W.; Khan, B.M. A reliable, delay bounded and less complex communication protocol for multicluster FANETs. Digit. Commun. Netw. 2017, 3, 30–38. [Google Scholar] [CrossRef]
- Banerji, S.; Chowdhury, R.S. Wi-Fi & WiMAX: A comparative study. Indian J. Eng. 2013, arXiv:1302.22472. [Google Scholar]
- Rahman, M.A. Enabling drone communications with WiMAX Technology. In Proceedings of the IISA 2014, The 5th International Conference on Information, Intelligence, Systems and Applications, Chania, Greece, 7–9 July 2014; pp. 323–328. [Google Scholar]
- Dalmasso, I.; Galletti, I.; Giuliano, R.; Mazzenga, F. WiMAX networks for emergency management based on UAVs. In Proceedings of the 2012 IEEE First AESS European Conference on Satellite Telecommunications (ESTEL), Rome, Italy, 2–5 October 2012; pp. 1–6. [Google Scholar]
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.; Gao, S.; Asplund, H.; Maattanen, H.; Bergstrom, M.; Euler, S.; Wang, Y. The Sky Is Not the Limit: LTE for Unmanned Aerial Vehicles. IEEE Commun. Mag. 2018, 56, 204–221. [Google Scholar] [CrossRef]
- Qazi, S.; Siddiqui, A.S.; Wagan, A.I. UAV based real time video surveillance over 4G LTE. In Proceedings of the 2015 International Conference on Open Source Systems & Technologies (ICOSST), Lahore, Pakistan, 17–19 December 2015; pp. 141–145. [Google Scholar]
- Van der Bergh, B.; Chiumento, A.; Pollin, S. LTE in the sky: Trading off propagation benefits with interference costs for aerial nodes. IEEE Commun. Mag. 2016, 54, 44–50. [Google Scholar] [CrossRef]
- Nguyen, H.C.; Amorim, R.; Wigard, J.; Kovács, I.Z.; Sørensen, T.B.; Mogensen, P.E. How to Ensure Reliable Connectivity for Aerial Vehicles Over Cellular Networks. IEEE Access 2018, 6, 12304–12317. [Google Scholar] [CrossRef]
- Jiang, D.; Liu, G. An Overview of 5G Requirements—5G Mobile Communications; Springer: Cham, Switzerland, 2017; pp. 3–26. [Google Scholar] [CrossRef]
- Bor-Yaliniz, I.; Yanikomeroglu, H. The new frontier in ran heterogeneity: Multi-tier drone-cells. IEEE Commun. Mag. 2016, 54, 48–55. [Google Scholar] [CrossRef]
- Dong, Y.; Hassan, M.; Cheng, J.; Hossain, M.; Leung, V. An edge computing empowered radio access network with uav-mounted fso fronthaul and backhaul: Key challenges and approaches. arXiv, 2018; arXiv:1803.06381. [Google Scholar] [CrossRef]
- Sharma, V.; Song, F.; You, I.; Chao, H.-C. Efficient management and fast handovers in software defined wireless networks using uavs. IEEE Netw. 2017, 31, 78–85. [Google Scholar] [CrossRef]
- Huo, Y.; Dong, X.; Lu, T.; Xu, W.; Yuen, M. Distributed and multilayer UAV network for the next-generation wireless communication. arXiv, 2018; arXiv:1805.01534. [Google Scholar]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, in press. [Google Scholar] [CrossRef]
- Amorosi, L.; Chiaraviglio, L.; D’Andreagiovanni, F.; Blefari-Melazzi, N. Energy-efficient mission planning of UAVs for 5G coverage in rural zones. In Proceedings of the 2018 IEEE International Conference on Environmental Engineering (EE), Milan, Italy, 12–14 March 2018; pp. 1–9. [Google Scholar]
- Ma, D.; Yang, S. UAV image transmission system based on satellite relay. In Proceedings of the ICMMT 4th International Conference on, Proceedings Microwave and Millimeter Wave Technology, Nanjing, China, 18–21 August 2004; pp. 874–878. [Google Scholar]
- Skinnemoen, H. UAV & satellite communications live mission critical visual data. In Proceedings of the 2014 IEEE International Conference on Aerospace Electronics and Remote Sensing Technology, Yogyakarta, Indonesia, 13–14 November 2014; pp. 12–19. [Google Scholar]
- Naqvi, S.A.R.; Hassan, S.A.; Pervaiz, H.; Ni, Q. Drone-Aided Communication as a Key Enabler for 5G and Resilient Public Safety Networks. IEEE Commun. Mag. 2018, 56, 36–42. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Tran, T.X.; Hajisami, A.; Pompili, D. Cooperative Hierarchical Caching in 5G Cloud Radio Access Networks. IEEE Netw. 2017, 31, 35–41. [Google Scholar] [CrossRef]
- Zorbas, D.; Razafindralambo, T.; Guerriero, F. Energy efficient mobile target tracking using flying drones. Procedia Comput. Sci. 2013, 19, 80–87. [Google Scholar] [CrossRef]
- Sharma, V.; You, I.; Pau, G.; Collotta, M.; Lim, J.D.; Kim, J.N. LoRaWAN-Based Energy-Efficient Surveillance by Drones for Intelligent Transportation Systems. Energies 2018, 11, 573. [Google Scholar] [CrossRef]
- Sharma, V.; You, I.; Kumar, R. Energy efficient data dissemination in multi-UAV coordinated wireless sensor networks. Mob. Inf. Syst. 2016, 2016, 8475820. [Google Scholar] [CrossRef]
- Sikeridis, D.; Tsiropous, E.E.; Devetsikiotis, M.; Papavassiliou, S. Self-Adaptive Energy Efficient Operation in UAV-Assisted Public Safety Networks. In Proceedings of the 19th IEEE International Workshop on Signal Processing Advances in Wireless Communications (SPAWC 2018), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar]
- Anton, S.R.; Inman, D.J. Performance modeling of unmanned aerial vehicles with on-board energy harvesting. In Active and Passive Smart Structures and Integrated Systems; International Society for Optics and Photonics: Bellingham, WA, USA, 2011; Volume 7977. [Google Scholar]
- Lyu, J.; Zeng, Y.; Zhang, R. Cyclical multiple access in UAV aided communications: A throughput-delay tradeoff. arXiv, 2016; arXiv:1608.03180. [Google Scholar]
- Sharawi, M.S.; Aloi, D.N.; Rawashdeh, O. Design and implementation of embedded printed antenna arrays in small UAV wing structures. IEEE Trans. Antennas Propag. 2010, 58, 2531–2538. [Google Scholar] [CrossRef]
- Ceran, E.T.; Erkilic, T.; Uysal-Biyikoglu, E.; Girici, T.; Leblebicioglu, K. Optimal energy allocation policies for a high altitude flying wireless access point. Trans. Emerg. Telecommun. Technol. 2017, 28, e3034. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Wireless Communication using Unmanned Aerial Vehicles (UAVs): Optimal Transport Theory for Hover Time Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 8052–8066. [Google Scholar] [CrossRef]
- Chen, M.; Saad, W.; Yin, C. Liquid state machine learning for resource allocation in a network of cache-enabled LTE-U UAVs. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Bujari, A.; Calafate, C.T.; Cano, J.C.; Manzoni, P.; Palazzi, C.E.; Ronzani, D. Flying ad-hoc network application scenarios and mobility models. Int. J. Distrib. Sens. Netw. 2017, 13, 1–17. [Google Scholar] [CrossRef]
- Hong, X.; Gerla, M.; Pei, G.; Chiang, C.-C. A group mobility model for ad hoc wireless networks. In Proceedings of the 2nd ACM International Workshop on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Seattle, WA, USA, 20 August 1999; pp. 53–60. [Google Scholar]
- Guillen-Perez, A.; Cano, M.D. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [PubMed]
- Shin, S.Y.; Choi, S.; Park, H.S.; Kwon, W.H. Lecture notes in computer science: Packet error rate analysis of IEEE 802.15.4 under IEEE 802.11b interference. In Proceedings of the 3rd International Conference on Wired/Wireless Internet Communications (WWIC ’05), Malaga, Spain, 11–13 May 2005; pp. 279–288. [Google Scholar]
- Mylin, A.K. A Communication Link Reliability Study for Small Unmanned Aerial Vehicles. Master’s Thesis, University of Kentucky, Lexington, KY, USA, 2007. [Google Scholar]
Figure 1.
High-altitude platform (HAP) for FANET.

Figure 2.
Communication architectures. (a) Centralized architecture; (b) unmanned aerial vehicle (UAV) ad-hoc network; (c) multi-group UAV ad-hoc network; (d) multi-layer UAV ad-hoc network.
Figure 2.
Communication architectures. (a) Centralized architecture; (b) unmanned aerial vehicle (UAV) ad-hoc network; (c) multi-group UAV ad-hoc network; (d) multi-layer UAV ad-hoc network.

Figure 3.
Outdoor/indoor distances for some of the short-range wireless technologies.

Figure 4.
Mobility models: (a) nomadic community (NC) with three nodes, where the nodes have a maximum distance rmax to move away from the reference point and the reference point moves through the simulation area a random distance d following a random waypoint (RWP) model; (b) mobility pattern of one group (i.e., three mobile nodes) using reference point group mobility (RPGM).
Figure 4.
Mobility models: (a) nomadic community (NC) with three nodes, where the nodes have a maximum distance rmax to move away from the reference point and the reference point moves through the simulation area a random distance d following a random waypoint (RWP) model; (b) mobility pattern of one group (i.e., three mobile nodes) using reference point group mobility (RPGM).

Figure 5.
Sample topology for multi-layer FANET.

Figure 6.
Node model for Gateway-UAV (GW-UAV).

Figure 7.
Node model for BM-UAV and BS-UAV.

Figure 8.
(a) Throughput vs. simulation time under RPGM. (b) End-to-end delay vs. simulation time under RPGM.
Figure 8.
(a) Throughput vs. simulation time under RPGM. (b) End-to-end delay vs. simulation time under RPGM.


Figure 9.
(a) Throughput vs. simulation time under RWP. (b) End-to-end delay vs. simulation time under RPW.
Figure 9.
(a) Throughput vs. simulation time under RWP. (b) End-to-end delay vs. simulation time under RPW.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison between different communication technologies available for UAVs.
| Communication Technology | IEEE Standard | Frequency/Medium | Spectrum Type | Device Mobility | Theoretical Data Rate | Range Indoor-Outdoor | Network Typology | Latency | Advantages | Limitations |
|---|---|---|---|---|---|---|---|---|---|---|
| Wi-Fi [7,8] | 802.11 | 2.4 GHz IR | Unlicensed | Yes | Up to 2 Mbps | 20 m–100 m | Ad-hoc, star, mesh, hybrid | <5 ms | High speed and cheap | Limited range |
| 802.11a | 5 GHz | Unlicensed | Yes | Up to 54 Mbps | 35 m–120 m | Ad-hoc, star, mesh, hybrid | ||||
| 802.11b | 2.4 GHz | Unlicensed | Yes | Up to 11 Mbps | 35 m–140 m | Ad-hoc, star, mesh, hybrid | ||||
| 802.11n | 2.4/5 GHz | Unlicensed | Yes | Up to 600 Mbps | 70 m–250 m | Ad-hoc, star, mesh, hybrid | ||||
| 802.11g | 2.4 GHz | Unlicensed | Yes | Up to 54 Mbps | 38 m–140 m | Ad-hoc, star, mesh, hybrid | ||||
| 802.11ac | 5 GHz | Unlicensed | Yes | Up to 3466 Mbps | 35 m–120 m | Ad-hoc, star, mesh, hybrid | ||||
| Bluetooth 5 [9,10,11,12] | 802.15.1 | 2.4 GHz | Unlicensed | Yes | Up to 2 Mbps | 40 m–200 m | Ad-hoc, piconet | 3 ms | Energy-efficient | Low data rate |
| ZigBee [13,14,15] | 802.15.4 | 2.4 GHz | Unlicensed | Yes | 250 Kbps | 10 m–100 m | Ad-hoc, star, mesh, tree, cluster | 15 ms | Low cost | Low data rate |
| WiMAX [16,17,18] | 802.16a | 2 to 11 GHz | Licensed | Yes | Up to 75 Mbps | Up to 48 km | Wide-area wireless backhaul | 30 ms | High throughput | Interference issues |
| LTE [19,20,21,22] | LTE | Up to 20 MHz | Licensed | Yes | Up to 300 Mbps | Up to 100 km | Flat, IP based | 5 ms | High bandwidth | Expensive |
| 5G [23,24,25,26,27,28,29] | 5G (eMBB) | 28 GHz | Licensed | Yes | Up to 20 Gbps | Wide Area | IP based | 1 ms | High data rate | Expensive |
| Satellite [30,31] | Satellite | Up to 40 GHz | Licensed | Yes | Up to 1 Gbps | World Wide | - | 550 ms | Wide coverage | High delay and high cost |
Table 2.
Simulation parameters.
| Parameter | Value |
|---|---|
| Area Dimensions | 1 km × 1 km |
| Altitude of UAVs | 25 m |
| Number of UAVs | 42 |
| Directional Gain | 10 dBi |
| Frequency | 2.4 GHz |
| Data Rates | 2 Mbps, 11 Mbps |
| Packet Interval (s) | Exponential (1) |
| Packet Size(byte) | 1024 |
| Simulation Time | 1600 s |
| Node Type | Mobile |
| Mobility Model | RPGM, RWP |
| Speed of UAVs | 15 m/s |
| Transmission Power | −97 dBm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Khan, M.A.; Qureshi, I.M.; Khanzada, F. A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET). Drones 2019, 3, 16. https://0-doi-org.brum.beds.ac.uk/10.3390/drones3010016
AMA Style
Khan MA, Qureshi IM, Khanzada F. A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET). Drones. 2019; 3(1):16. https://0-doi-org.brum.beds.ac.uk/10.3390/drones3010016
Chicago/Turabian StyleKhan, Muhammad Asghar, Ijaz Mansoor Qureshi, and Fahimullah Khanzada. 2019. "A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET)" Drones 3, no. 1: 16. https://0-doi-org.brum.beds.ac.uk/10.3390/drones3010016