
Monitoring Dynamic Braided River Habitats: Applicability and Efficacy of Aerial Photogrammetry from Manned Aircraft versus Unmanned Aerial Systems



Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Site
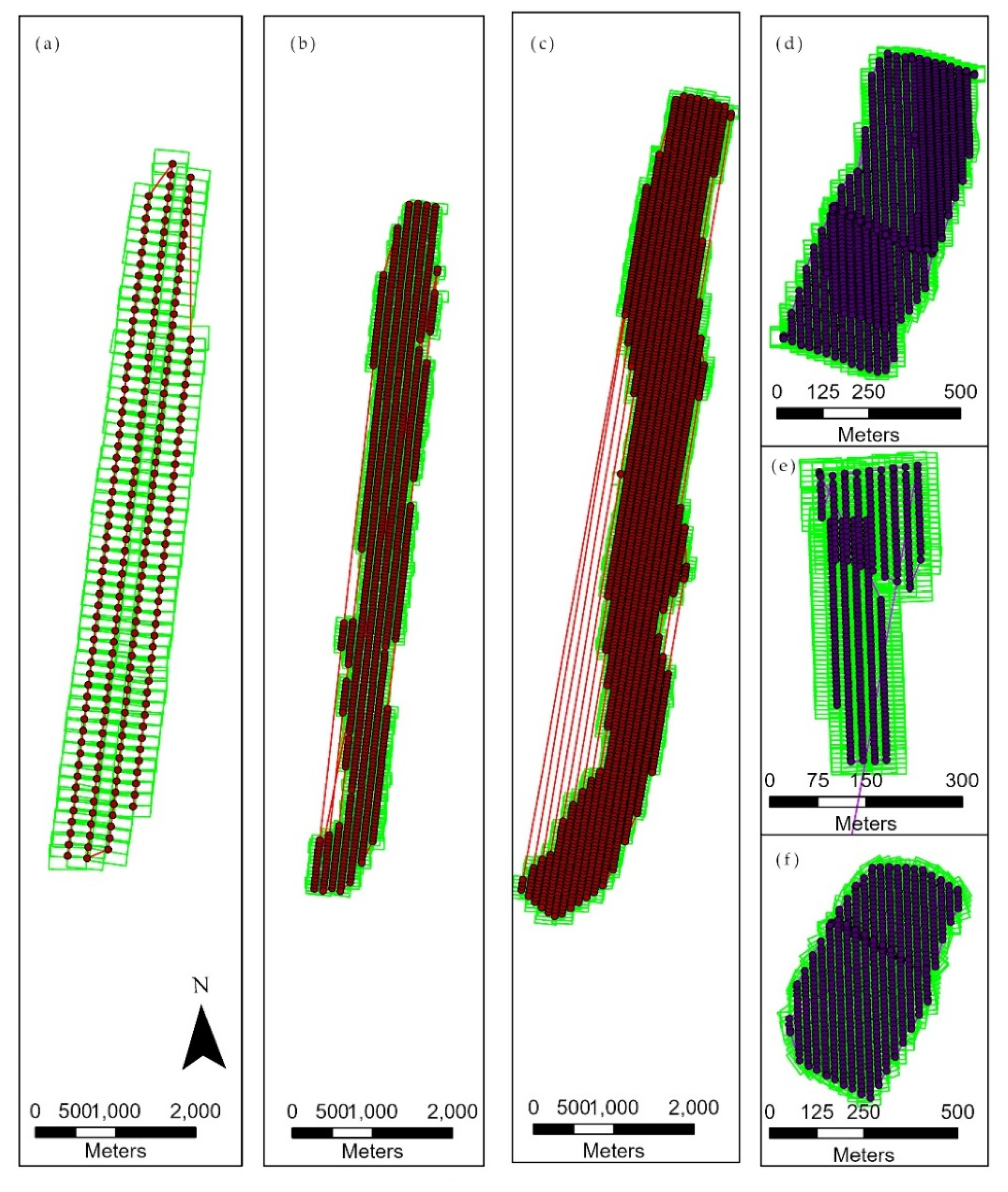
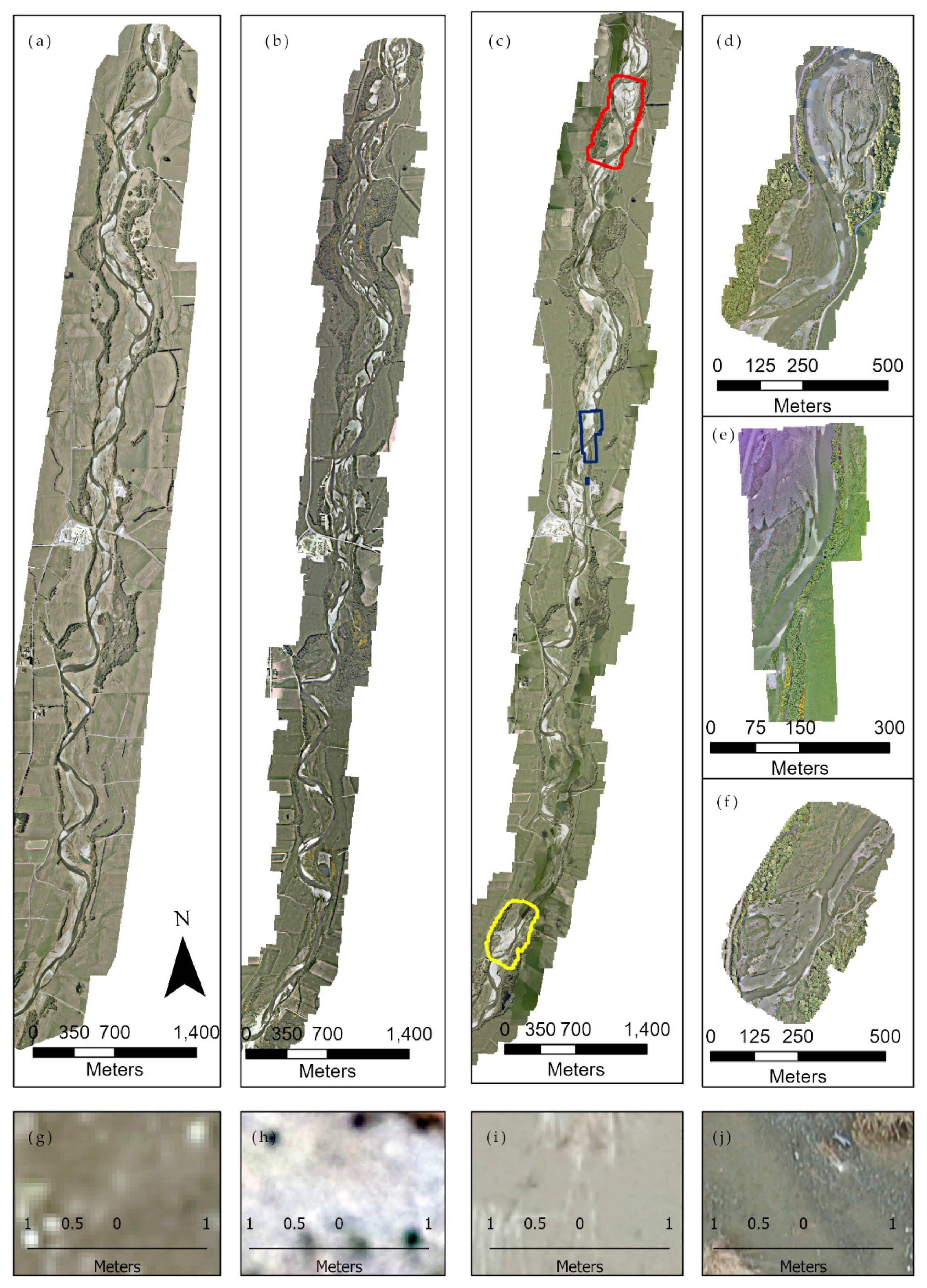
2.2. Manned Aircraft and Unmanned Flight Missions
2.3. Input Resource Assessment
2.3.1. Technological Aspects
2.3.2. Administrative Aspects
2.3.3. Economic Assessment
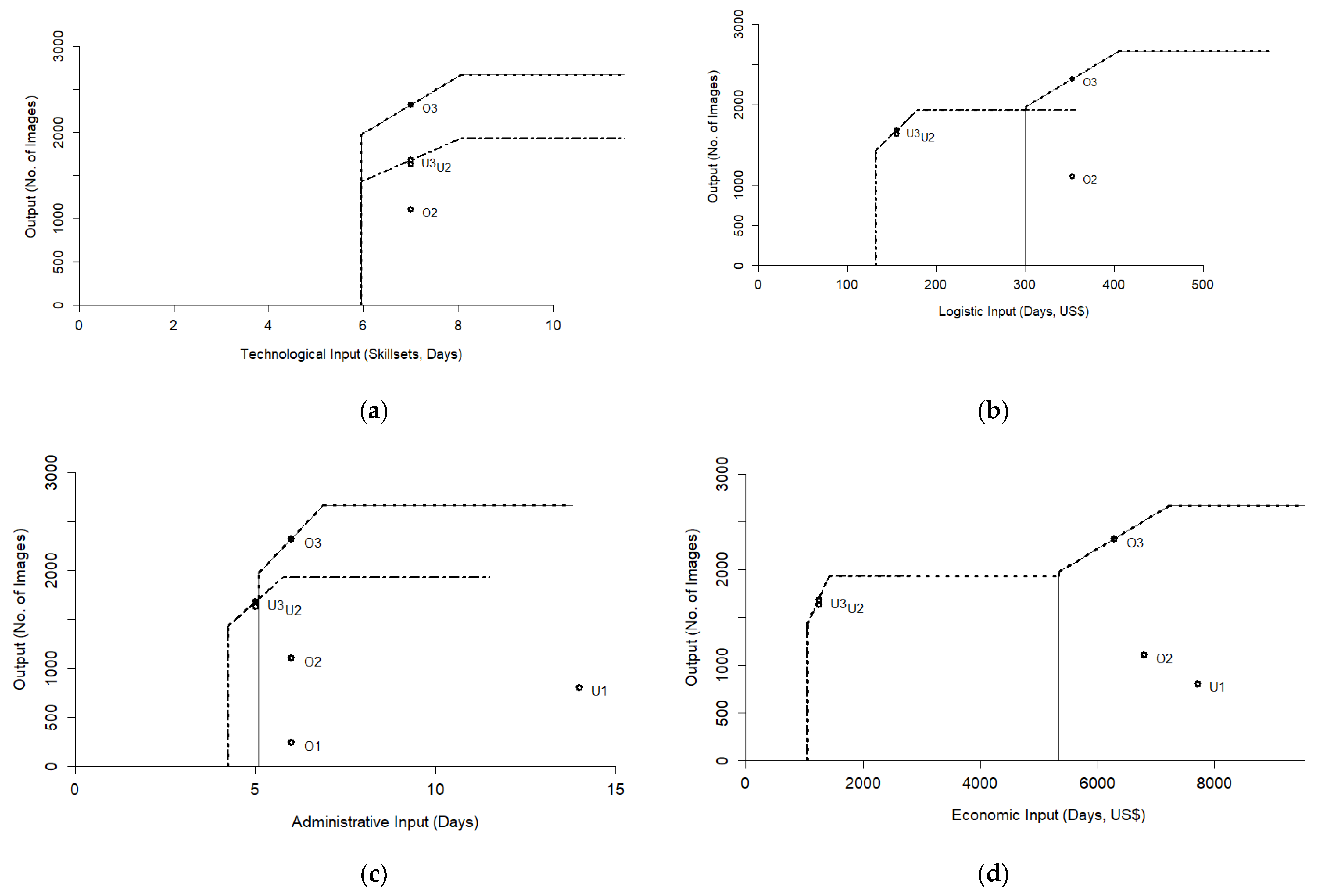
2.4. Efficiency Measurements and Data Envelopment Analysis (DEA)
3. Results
3.1. Resource Assessment and Efficiency Measures
3.1.1. Technological
3.1.2. Logistical
3.1.3. Administrative
3.1.4. Economic
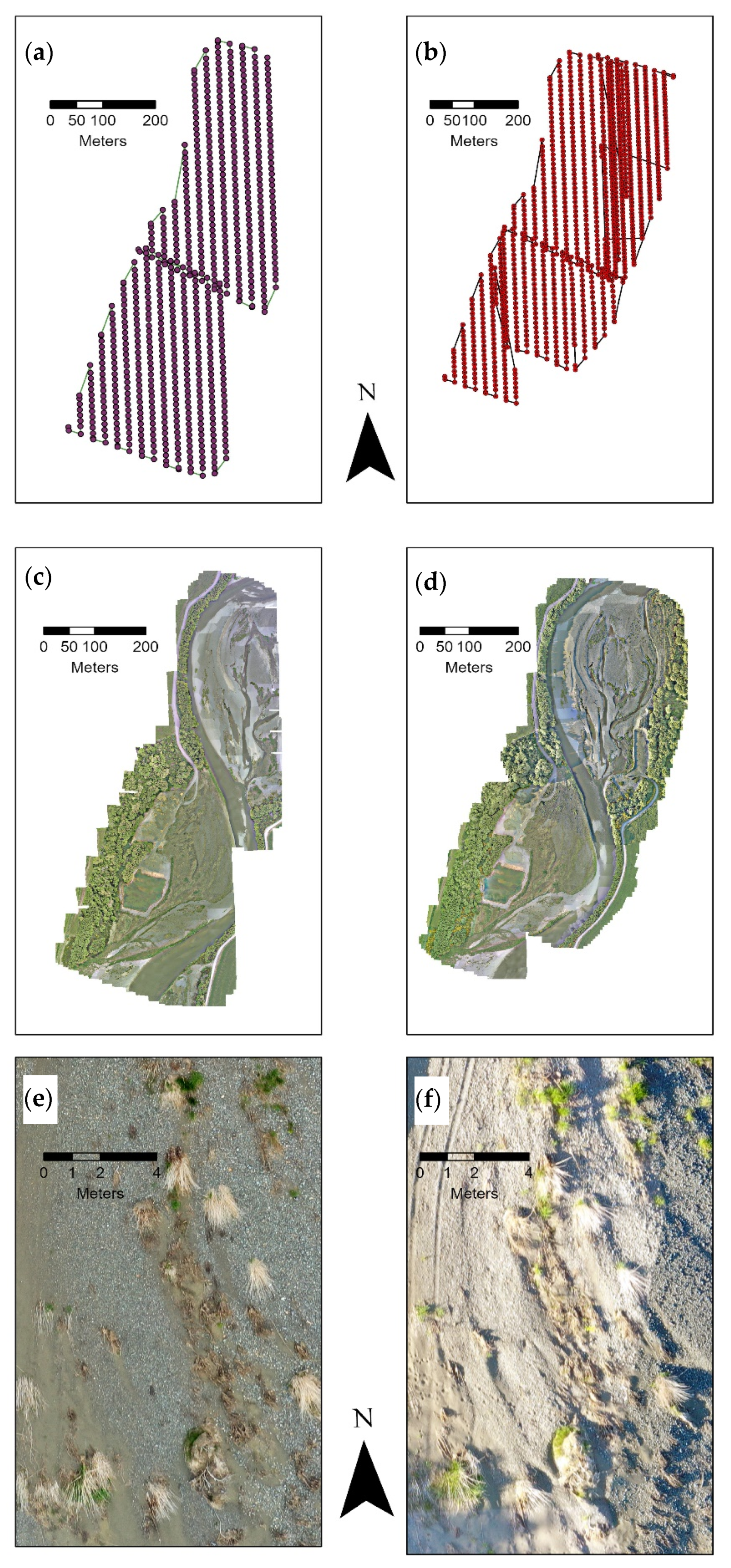
3.2. Re-Deployment of Unmanned Aerial Vehicles (UASs) Following a Flooding Event of the Riverbed
3.3. Comparison of Manned Aircraft and Unmanned Flights Through Data Envelopment Productivity Frontier Analysis (DEA)
4. Discussion
4.1. UASs Have Higher Input Efficiency Than Manned Aircraft Flights
4.2. Output Efficiency of Manned Aircraft Flights Are Higher Than UASs for Aerial Photography
4.3. High UAS Flexibility for Monitoring Dynamic Ecosystems
4.4. Use of Frontier Analysis in Future Research
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Coops, N.C.; Goodbody, T.R.H.; Cao, L. Four Steps to Extend Drone Use in Research. Nature 2019, 572, 433–435. [Google Scholar] [CrossRef] [PubMed]
- Koh, L.P.; Wich, S.A. Dawn of Drone Ecology: Low-Cost Autonomous Aerial Vehicles for Conservation. Trop. Conserv. Sci. 2012, 5, 121–132. [Google Scholar] [CrossRef] [Green Version]
- Duffy, J.P.; Cunliffe, A.M.; DeBell, L.; Sandbrook, C.; Wich, S.A.; Shutler, J.D.; Myers-Smith, I.H.; Varela, M.R.; Anderson, K. Location, Location, Location: Considerations When Using Lightweight Drones in Challenging Environments. Remote Sens. Ecol. Conserv. 2018, 4, 7–19. [Google Scholar] [CrossRef]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Ardizzone, G.D. Unmanned Aerial Systems (Uass) for Environmental Monitoring: A Review with Applications in Coastal Habitats. Aer. Robots Aerodyn. Control Appl. 2017. [CrossRef] [Green Version]
- Carlson, B.Z.; Hébert, M.; Van Reeth, C.; Bison, M.; Laigle, I.; Delestrade, A. Monitoring the Seasonal Hydrology of Alpine Wetlands in Response to Snow Cover Dynamics and Summer Climate: A Novel Approach with Sentinel-2. Remote Sens. 2020, 12, 1959. [Google Scholar] [CrossRef]
- Long, N.; Millescamps, B.; Guillot, B.; Pouget, F.; Bertin, X. Monitoring the Topography of a Dynamic Tidal Inlet Using UAV Imagery. Remote Sens. 2016, 8, 387. [Google Scholar] [CrossRef] [Green Version]
- Francis, R.J.; Lyons, M.B.; Kingsford, R.T.; Brandis, K.J. Counting Mixed Breeding Aggregations of Animal Species Using Drones: Lessons from Waterbirds on Semi-Automation. Remote Sens. 2020, 12, 1185. [Google Scholar] [CrossRef] [Green Version]
- Burke, C.; Rashman, M.; Wich, S.; Symons, A.; Theron, C.; Longmore, S. Optimizing Observing Strategies for Monitoring Animals Using Drone-Mounted Thermal Infrared Cameras. Int. J. Remote Sens. 2019, 40, 439–467. [Google Scholar] [CrossRef] [Green Version]
- Scholten, C.N.; Kamphuis, A.J.; Vredevoogd, K.J.; Lee-Strydhorst, K.G.; Atma, J.L.; Shea, C.B.; Lamberg, O.N.; Proppe, D.S. Real-Time Thermal Imagery from an Unmanned Aerial Vehicle Can Locate Ground Nests of a Grassland Songbird at Rates Similar to Traditional Methods. Biol. Conserv. 2019, 233, 241–246. [Google Scholar] [CrossRef]
- Havrilla, C.A.; Villarreal, M.L.; DiBiase, J.L.; Duniway, M.C.; Barger, N.N. Ultra-High-Resolution Mapping of Biocrusts with Unmanned Aerial Systems. Remote Sens. Ecol. Conserv. 2020, 6, 441–456. [Google Scholar] [CrossRef]
- Agapiou, A. Vegetation Extraction Using Visible-Bands from Openly Licensed Unmanned Aerial Vehicle Imagery. Drones 2020, 4, 27. [Google Scholar] [CrossRef]
- Rahlf, J.; Breidenbach, J.; Solberg, S.; Næsset, E.; Astrup, R. Digital Aerial Photogrammetry Can Efficiently Support Large-Area Forest Inventories in Norway. For. Int. J. For. Res. 2017, 90, 710–718. [Google Scholar] [CrossRef]
- Wynn, C.R. Drone Technology: Is It Worth the Investment in Agriculture. Ph.D. Thesis, The University of Nebraska, Lincoln, NE, USA, 2019. [Google Scholar]
- López-Granados, F.; Torres-Sánchez, J.; Serrano-Pérez, A.; de Castro, A.I.; Mesas-Carrascosa, F.-J.; Peña, J.-M. Early Season Weed Mapping in Sunflower Using UAV Technology: Variability of Herbicide Treatment Maps against Weed Thresholds. Precis. Agric. 2016, 17, 183–199. [Google Scholar] [CrossRef]
- Gray, D.P. Ecological Connectivity in Braided Riverscapes. Ph.D. Thesis, University of Canterbury, Christchurch, New Zealand, 2010. [Google Scholar]
- O’Donnell, C.F.J.; Sanders, M.D.; Woolmore, C.B.; Maloney, R. Management and Research Priorities for Conserving Biodiversity on New Zealand’s Braided Rivers; Department of Conservation: Wellington, New Zealand, 2016; ISBN 978-0-478-15097-1. [Google Scholar]
- Piégay, H.; Grant, G.; Nakamura, F.; Trustrum, N. Braided River Management: From Assessment of River Behaviour to Improved Sustainable Development. In Braided Rivers; Smith, G.H.S., Best, J.L., Bristow, C.S., Petts, G.E., Eds.; Blackwell Publishing Ltd.: Oxford, UK, 2006; pp. 257–275. ISBN 978-1-4443-0437-4. [Google Scholar]
- Berra, E.F.; Gaulton, R.; Barr, S. Assessing Spring Phenology of a Temperate Woodland: A Multiscale Comparison of Ground, Unmanned Aerial Vehicle and Landsat Satellite Observations. Remote Sens. Environ. 2019, 223, 229–242. [Google Scholar] [CrossRef]
- Greene, T.C.; Sprague, R.; Schutter, A.D.; Schurink, C.; Briden, K.; Earl, R. Use of Aerial Remote Sensing to Detect Pre-Coning Wilding Conifers in a Dry Grassland Environment; Department of Conservation: Wellington, New Zealand, 2020; ISBN 978-0-9951392-5-1. [Google Scholar]
- Joyce, K.E.; Anderson, K.; Bartolo, R.E. Of Course We Fly Unmanned—We’re Women! Drones 2021, 5, 21. [Google Scholar] [CrossRef]
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone Technology: Types, Payloads, Applications, Frequency Spectrum Issues and Future Developments. In The Future of Drone Use: Opportunities and Threats from Ethical and Legal Perspectives; Custers, B., Ed.; Information Technology and Law Series; T.M.C. Asser Press: The Hague, The Netherlands, 2016; pp. 21–45. ISBN 978-94-6265-132-6. [Google Scholar]
- Lopez-Vicente, M.; Lana-Renault, N.; Maria Garcia-Ruiz, J.; Navas, A. Assessing the Potential Effect of Different Land Cover Management Practices on Sediment Yield from an Abandoned Farmland Catchment in the Spanish Pyrenees. J. Soils Sediments 2011, 11, 1440–1455. [Google Scholar] [CrossRef]
- Dash, J.P.; Watt, M.S.; Paul, T.S.H.; Morgenroth, J.; Pearse, G.D. Early Detection of Invasive Exotic Trees Using UAV and Manned Aircraft Multispectral and LiDAR Data. Remote Sens. 2019, 11, 1812. [Google Scholar] [CrossRef] [Green Version]
- Lewis, D.; Phinn, S.; Arroyo, L. Cost-Effectiveness of Seven Approaches to Map Vegetation Communities—A Case Study from Northern Australia’s Tropical Savannas. Remote Sens. 2013, 5, 377–414. [Google Scholar] [CrossRef] [Green Version]
- Harvey, P. Exiftool Application Documentation. Available online: https://exiftool.org/exiftool_pod.html (accessed on 25 April 2021).
- DJI New Zealand—DJI Ferntech Authorised Retail Store in New Zealand. Available online: https://www.ferntech.co.nz/ (accessed on 30 March 2021).
- Department of Conservation, N.Z. Maukahuka Project Updates. Available online: https://www.doc.govt.nz/our-work/maukahuka-pest-free-auckland-island/maukahuka-updates/ (accessed on 30 March 2021).
- Bogetoft, P.; Otto, L. Benchmarking with DEA, SFA, and R; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2011; ISBN 978-1-4419-7960-5. [Google Scholar]
- Battese, G.E.; Rao, D.S.P.; O’Donnell, C.J. A Metafrontier Production Function for Estimation of Technical Efficiencies and Technology Gaps for Firms Operating under Different Technologies. J. Product. Anal. 2004, 21, 91–103. [Google Scholar] [CrossRef]
- Otto, P.B.; Otto, L. Benchmarking: Benchmark and Frontier Analysis Using DEA and SFA; 2020. R package version 0.29. Available online: https://cran.r-project.org/web/packages/Benchmarking/Benchmarking.pdf (accessed on 30 March 2021).
- Daraio, C.; Kerstens, K.H.J.; Nepomuceno, T.C.C.; Sickles, R. Productivity and Efficiency Analysis Software: An Exploratory Bibliographical Survey of the Options. J. Econ. Surv. 2019, 33, 85–100. [Google Scholar] [CrossRef]
- Bogetoft, P. Performance Benchmarking: Measuring and Managing Performance; Management for Professionals; Springer: New York, NY, USA, 2012; ISBN 978-1-4614-6042-8. [Google Scholar]
- Stroobants, J.; Bouckaert, G. Benchmarking Local Public Libraries Using Non-Parametric Frontier Methods: A Case Study of Flanders. Libr. Inf. Sci. Res. 2014, 36, 211–224. [Google Scholar] [CrossRef] [Green Version]
- Boucher, P. Domesticating the Drone: The Demilitarisation of Unmanned Aircraft for Civil Markets. Sci. Eng. Ethics 2015, 21, 1393–1412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sandbrook, C. The Social Implications of Using Drones for Biodiversity Conservation. Ambio 2015, 44, 636–647. [Google Scholar] [CrossRef] [Green Version]
- AskUs|Article|Are Aerial Photographs of My Property a Privacy Issue?|Office of the Privacy Commissioner. Available online: https://privacy.org.nz/tools/knowledge-base/view/489 (accessed on 25 March 2021).
- Aviation Concerns|Aviation.Govt.Nz. Available online: https://www.aviation.govt.nz/safety/aviation-concerns/ (accessed on 30 March 2021).
- Intro to Part 101 Rules for Unmanned Aircraft|Aviation.Govt.Nz. Available online: https://www.aviation.govt.nz/drones/rules-and-regulations-for-drones-in-new-zealand/part-101-rules-for-drones/ (accessed on 30 March 2021).
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Mulero-Pázmány, M.; Jenni-Eiermann, S.; Strebel, N.; Sattler, T.; Negro, J.J.; Tablado, Z. Unmanned Aircraft Systems as A New Source of Disturbance for Wildlife: A Systematic Review. PLoS ONE 2017, 12, e0178448. [Google Scholar] [CrossRef] [Green Version]
- Meinen, B.U.; Robinson, D.T. Agricultural Erosion Modelling: Evaluating Usle and Wepp Field-Scale Erosion Estimates Using Uav Time-Series Data. Environ. Model. Softw. 2021, 137, 104962. [Google Scholar] [CrossRef]
- Van Iersel, W.; Straatsma, M.; Addink, E.; Middelkoop, H. Monitoring Height and Greenness of Non-Woody Floodplain Vegetation with UAV Time Series. ISPRS J. Photogramm. Remote Sens. 2018, 141, 112–123. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspects | Criteria | Data Definition | Analysis | Notes |
|---|---|---|---|---|
| Technological | Software | Availability, accessibility, and complexity | Qualitative analysis: information synthesis | Data envelopment analysis (DEA) production frontier analysis is carried out for all aspects |
| Hardware | ||||
| Human resources | No. of personnel;days required to become trained | Descriptive statistics and Efficiency measures | Includes trained and untrained personnel required for operation | |
| Logistics | Acquiring and organizing resources | Cost (USD) | Descriptive statistics and efficiency measures | Includes the cost of ground operations |
| Time | Days | Time required for organizing ground operation | ||
| Administrative | Approval/consents | Days | Descriptive statistics and Efficiency measures | Consent stakeholders include organizations and private owners |
| Economical | Time | Total number of days | Descriptive statistics and Efficiency measures | Includes both preparedness and operational time and money |
| Money | Total money (USD) |
| Flying Phase | Flight Type | Technological | Logistical | Administrative | Operational | Economical | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| Skillsets (No) | Training (Days) | Days | Cost (US$) | (Days) | Cost (US$) | Execution (Days) | Total Days | Total Cost (US$) | ||
| Pre | Manned | 1.00 | 5.67 | 3.00 | 490.00 | 3.00 | 700 | 2.00 | 13.67 | 1190.00 |
| Unmanned | 1.00 | 3.00 | 1.67 | 140.00 | 4.67 | 25.67 | 1.00 | 10.33 | 165.67 | |
| Peri | Manned | 2.00 | 117.33 | 166.67 | 11,946.67 | 2.00 | 3710 | 1.00 | 287.00 | 15,656.67 |
| Unmanned | 2.00 | 10.67 | 5.00 | 956.67 | 2.33 | 700 | 1.00 | 19.00 | 1656.67 | |
| Post | Manned | 1.00 | 10.67 | 3.67 | 490.00 | 1.00 | 70.00 | 20.00 | 35.33 | 560.00 |
| Unmanned | 1.00 | 10.67 | 1.33 | 490.00 | 1.00 | 32.67 | 2.33 | 15.33 | 522.67 | |
| Overall | Manned | 4.00 | 133.67 | 172.67 | 12,926.67 | 6.00 | 4480 | 23.00 | 335.33 | 17,406.67 |
| Unmanned | 4.00 | 24.33 | 6.00 | 1586.67 | 8.00 | 758.33 | 4.33 | 42.67 | 2345.00 | |
| Flight Missions | Flight Type | Flying Time | Area Coverage (ha) | Ground Resolution: Reciprocal Normalized (Planned cm) | Image Processed (No) |
|---|---|---|---|---|---|
| First | Manned | February 2018 | 974.48 | 17 (5.8 cm) | 223 |
| Unmanned (South) | October 2020 | 20.60 | 125 (0.8 cm) | 682 | |
| Second | Manned | December 2019 | 615.63 | 23 (4.3 cm) | 1087 |
| Unmanned (Central, North) | November 2020 | 32.18 | 125 (0.8 cm) | 1509 | |
| Third | Manned | October 2020 | 999.24 | 36 (2.8 cm) | 2287 |
| Unmanned (North) | November 2020 | 30.81 | 125 (0.8 cm) | 1559 | |
| Overall (Average) | Manned | 2018–2020 | 863.12 | 25.33 | 1199.00 |
| Unmanned | 2020 | 27.86 | 125.00 | 1250.00 |
| Flying Phase | Flight Type | Average Efficiency | |||
|---|---|---|---|---|---|
| Technological | Logistical | Administrative | Economic | ||
| Pre | Manned | 0.90 | 0.66 | 0.71 | 0.59 |
| Unmanned | 1.00 | 0.78 | 0.73 | 0.75 | |
| Peri | Manned | 0.90 | 0.48 | 0.90 | 0.39 |
| Unmanned | 1.00 | 1.00 | 0.89 | 0.74 | |
| Post | Manned | 0.90 | 0.67 | 0.90 | 0.49 |
| Unmanned | 1.00 | 0.83 | 1.00 | 0.71 | |
| Overall | Manned | 0.76 | 0.55 | 0.81 | 0.39 |
| Unmanned | 1.00 | 0.88 | 0.79 | 0.73 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, M.S.I.; Ohlemüller, R.; Maloney, R.F.; Seddon, P.J. Monitoring Dynamic Braided River Habitats: Applicability and Efficacy of Aerial Photogrammetry from Manned Aircraft versus Unmanned Aerial Systems. Drones 2021, 5, 39. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5020039
Khan MSI, Ohlemüller R, Maloney RF, Seddon PJ. Monitoring Dynamic Braided River Habitats: Applicability and Efficacy of Aerial Photogrammetry from Manned Aircraft versus Unmanned Aerial Systems. Drones. 2021; 5(2):39. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5020039
Chicago/Turabian StyleKhan, M Saif I., Ralf Ohlemüller, Richard F. Maloney, and Philip J. Seddon. 2021. "Monitoring Dynamic Braided River Habitats: Applicability and Efficacy of Aerial Photogrammetry from Manned Aircraft versus Unmanned Aerial Systems" Drones 5, no. 2: 39. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5020039