
Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies

 ,
,  ,
,  , , , , and
, , , , and
Abstract
:1. Introduction
2. Literature Review
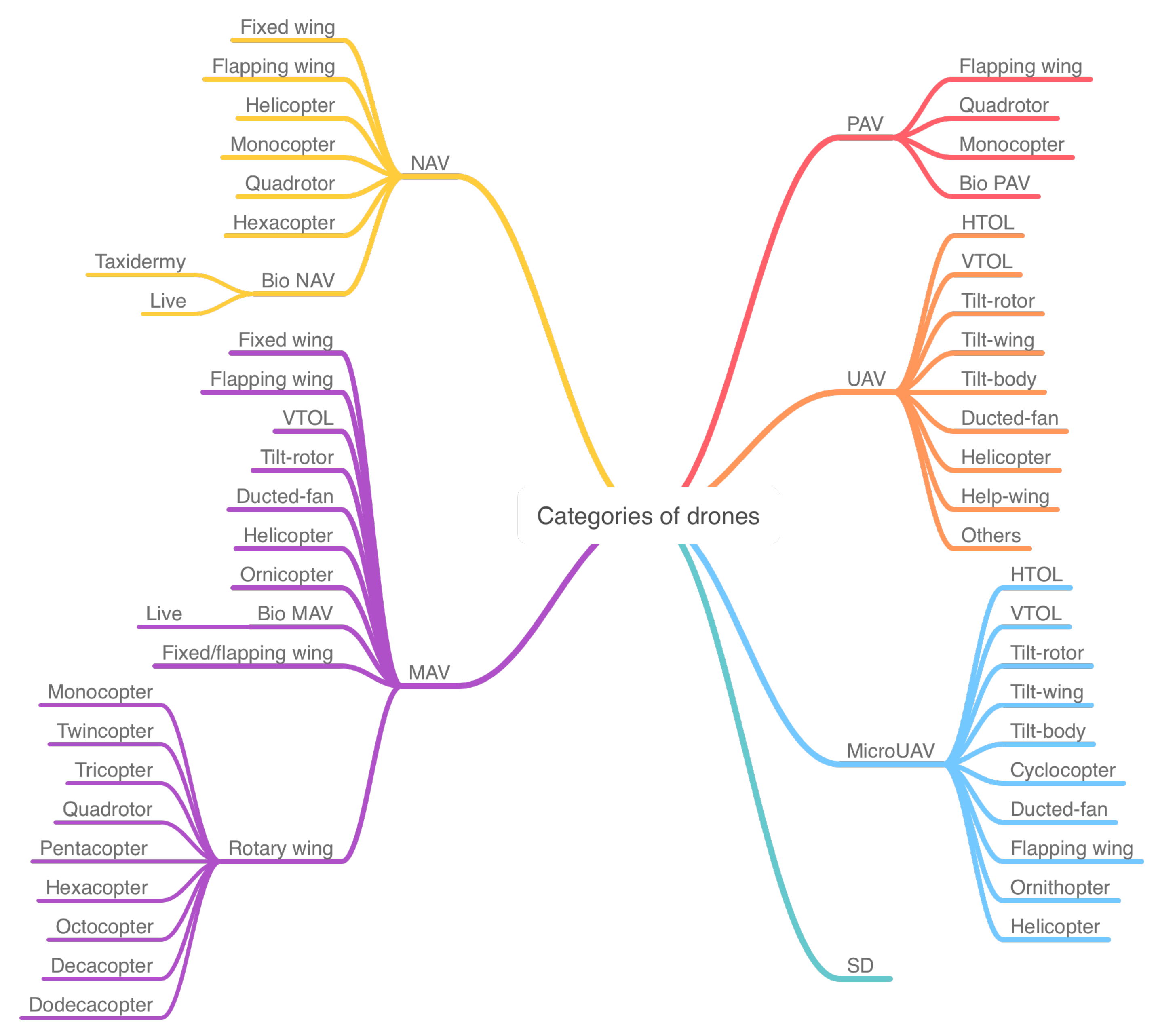
2.1. Unmanned Aerial Vehicles
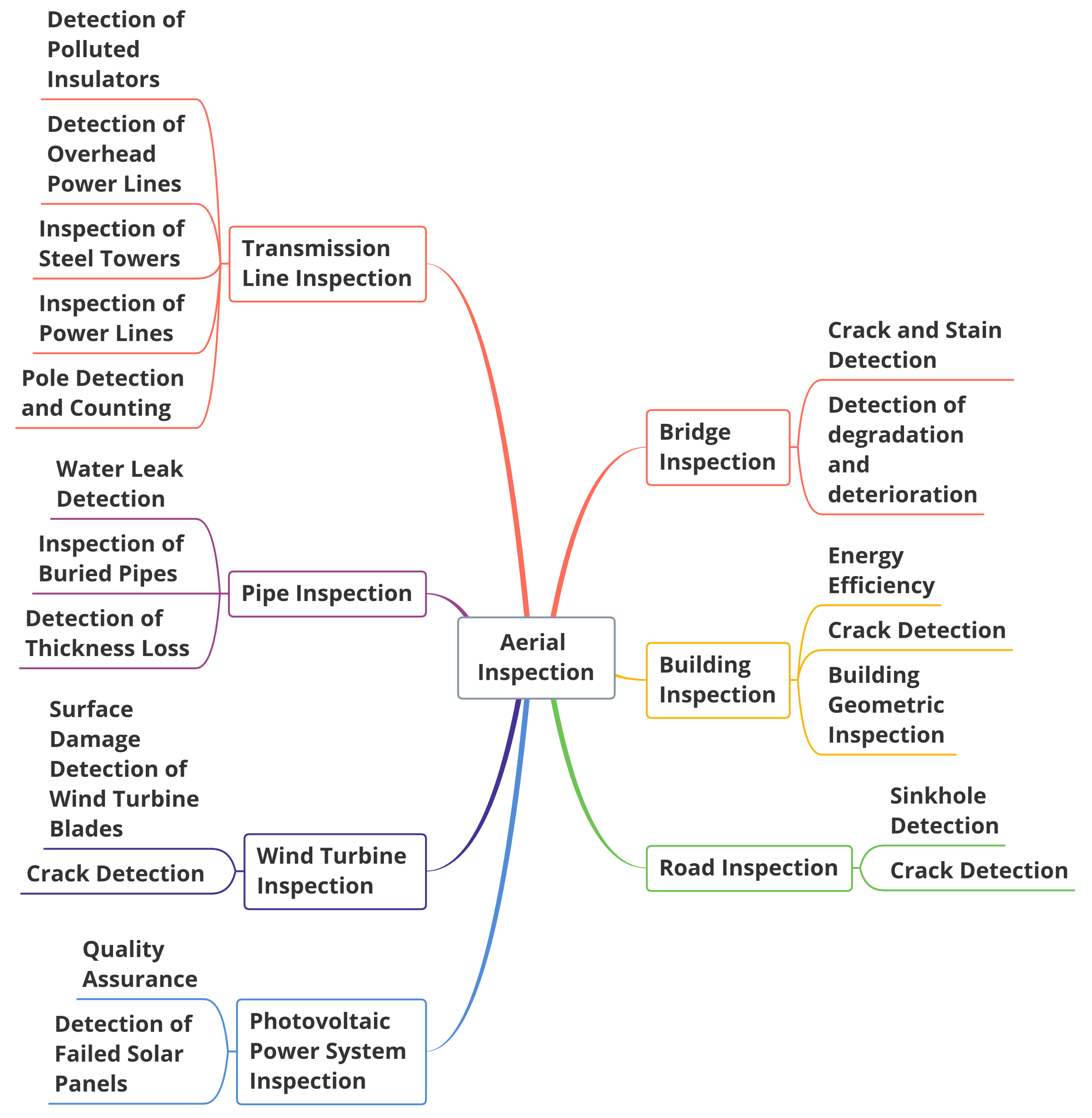
2.2. Drone-Based Inspection
2.2.1. Inspection of Photovoltaic (PV) Power Systems
2.2.2. Inspection of Power Lines
2.2.3. Inspection of Construction and Mining Sites
2.2.4. Inspection of Wind Turbines
2.2.5. Inspection of Pavement and Concrete Structures
2.2.6. Inspection of Buildings
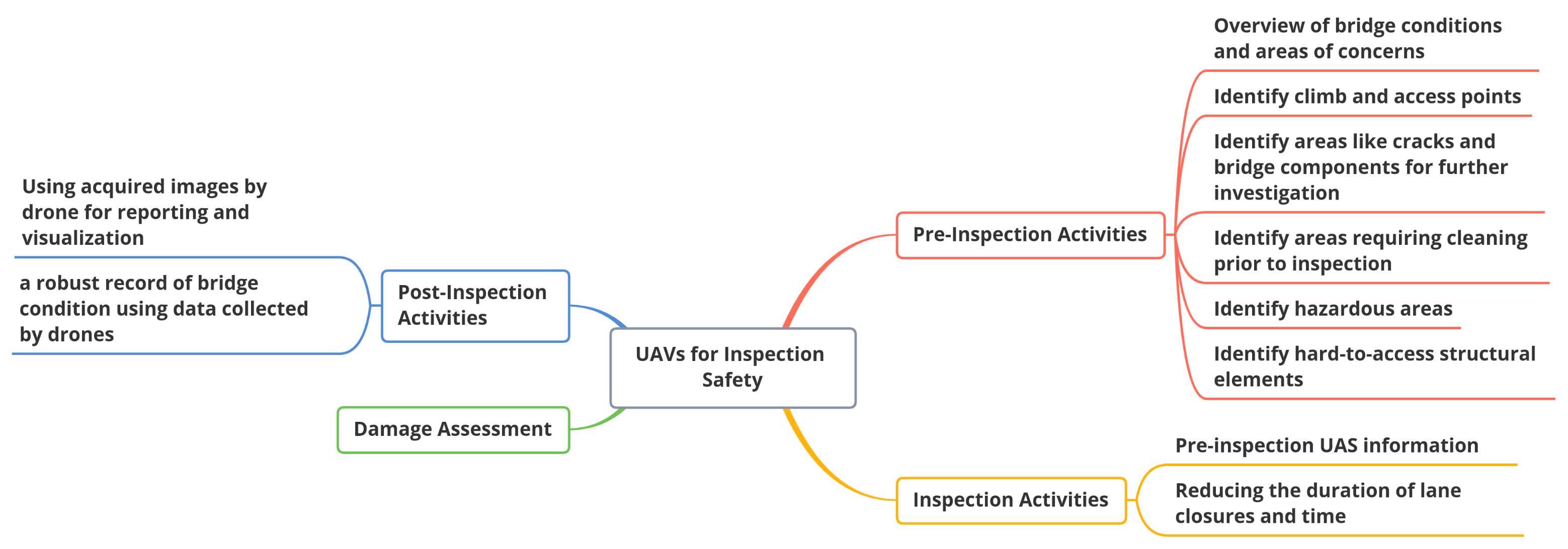
2.2.7. Inspection of Bridges
2.2.8. Inspection of Nuclear Sites and Monitoring of Radiological Risks
3. Drone-Enabled Inspection: An Alternative to Conventional Methods
3.1. The Production Rate and Size of Inspection Area
3.2. Inspection of Remote and Inaccessible Locations
3.3. Inspection of Hazardous or Dangerous Sites
3.4. Inspection of Large Specimens
4. Challenges of Drone-Enabled Aerial Inspection
4.1. Inspection Time Frame
4.2. Distance between Drone and Specimen
4.3. Effect of the Propellers on Thermal Inspection
4.4. Reflection of Drones and Surroundings
4.5. The Lack of Physical Access
5. Case Studies
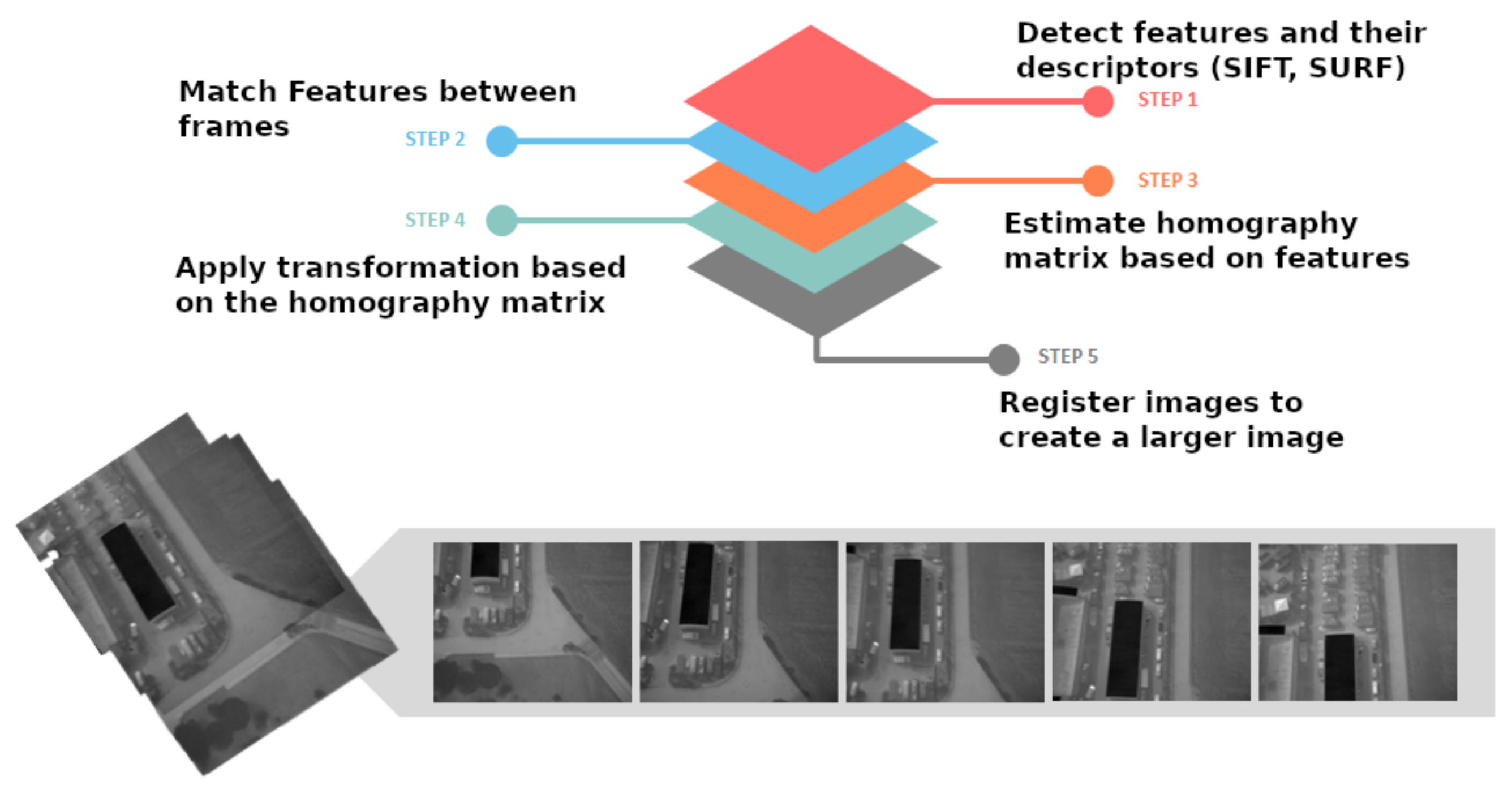
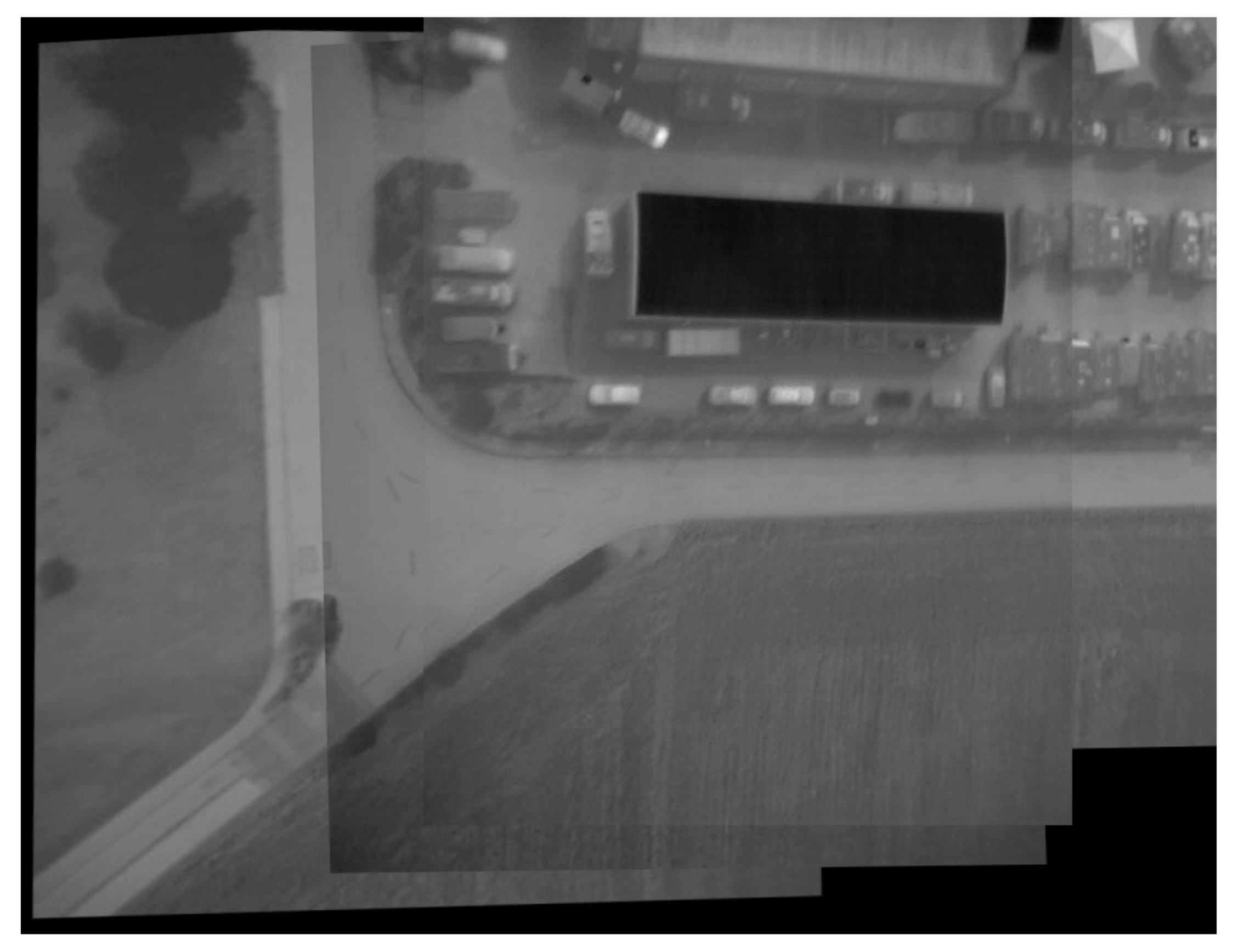
5.1. Aerial Thermographic Image Stitching
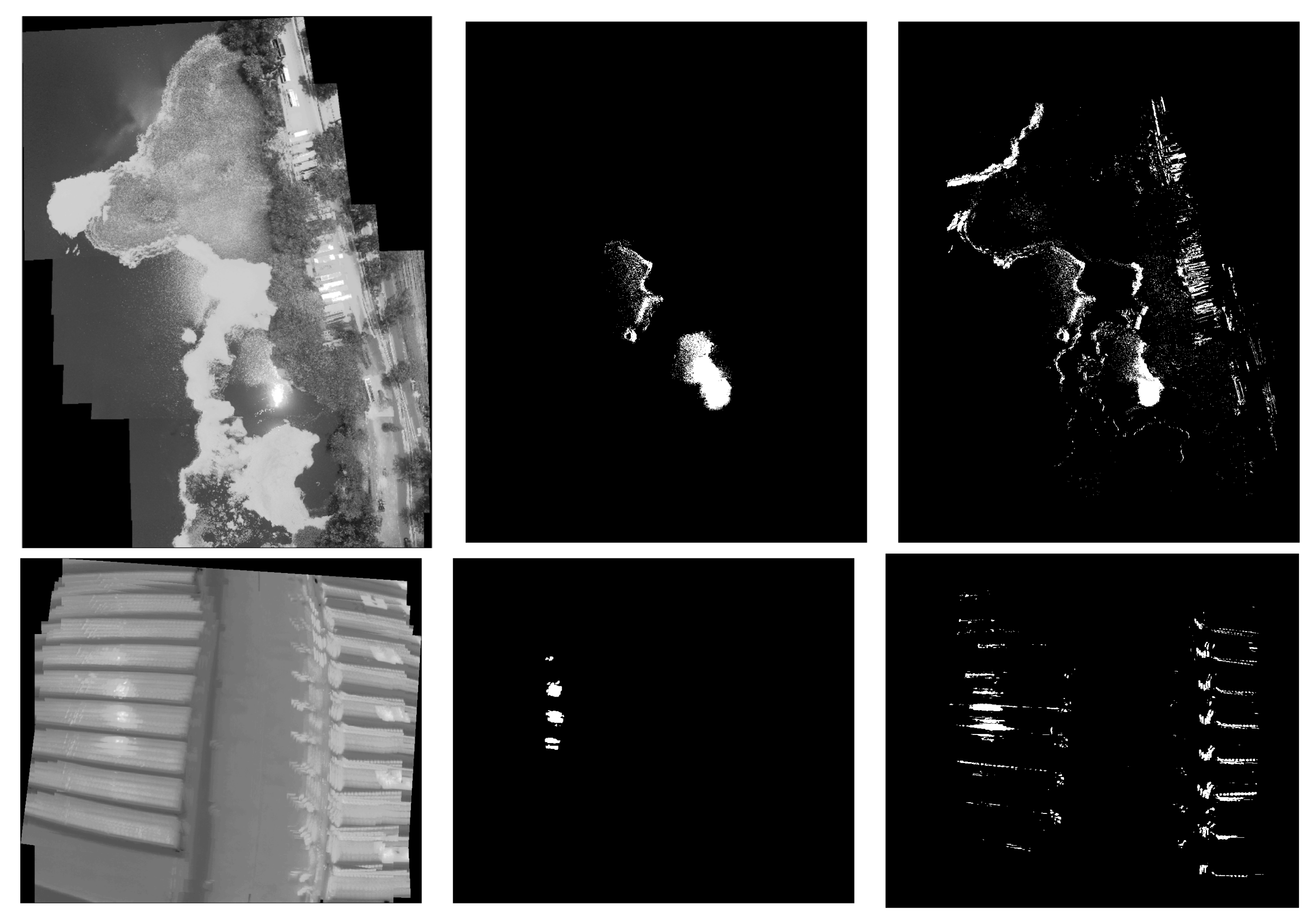
5.2. Reflection Detection in Drone-Based Thermographic Inspection
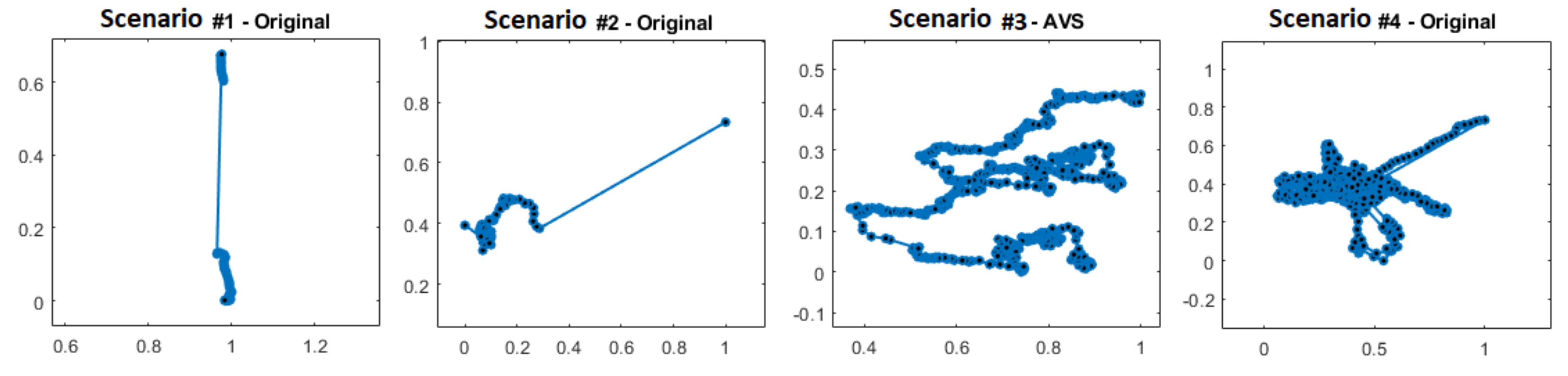
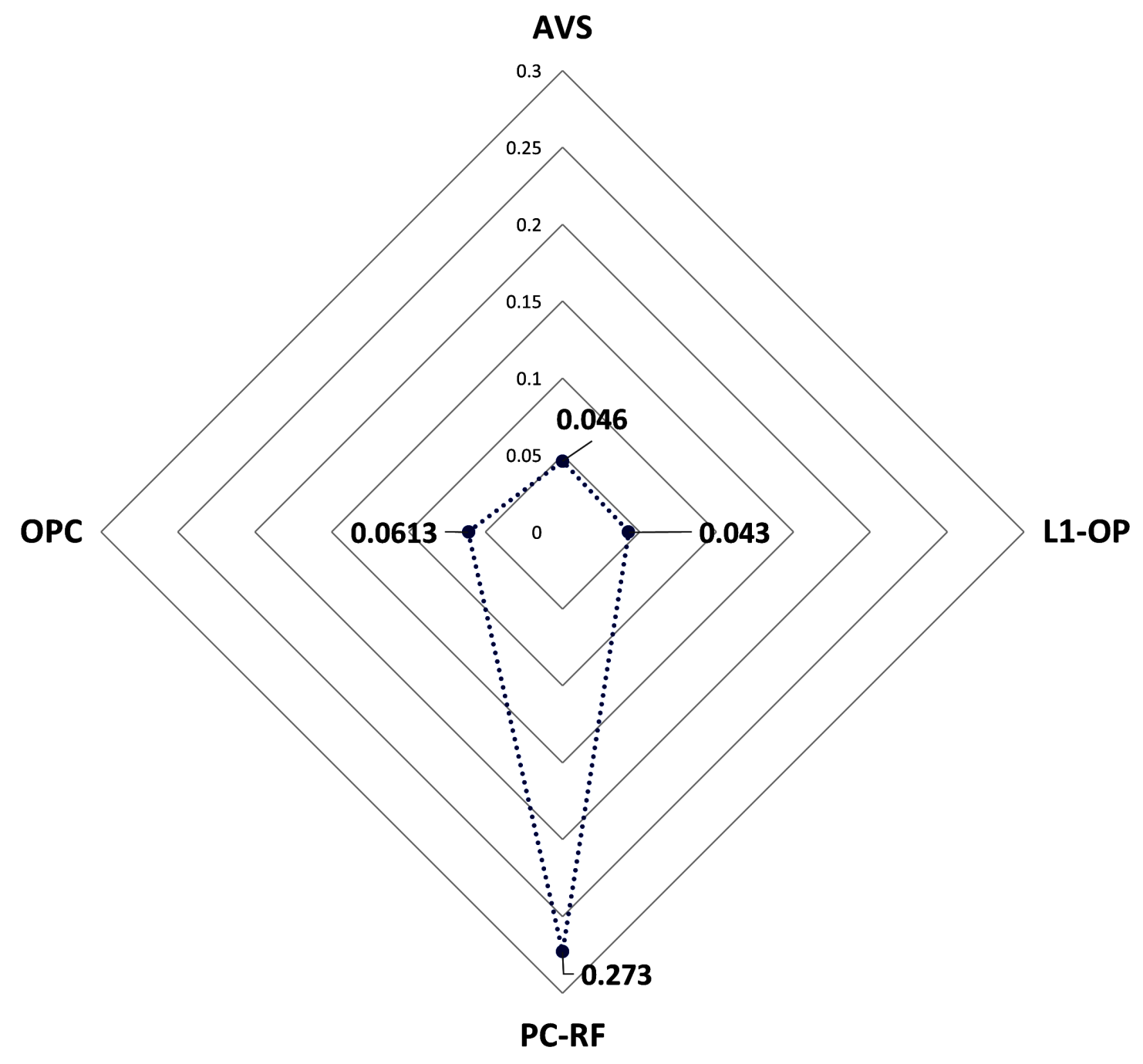
5.3. Video Stabilization in Case of Drone Hovering
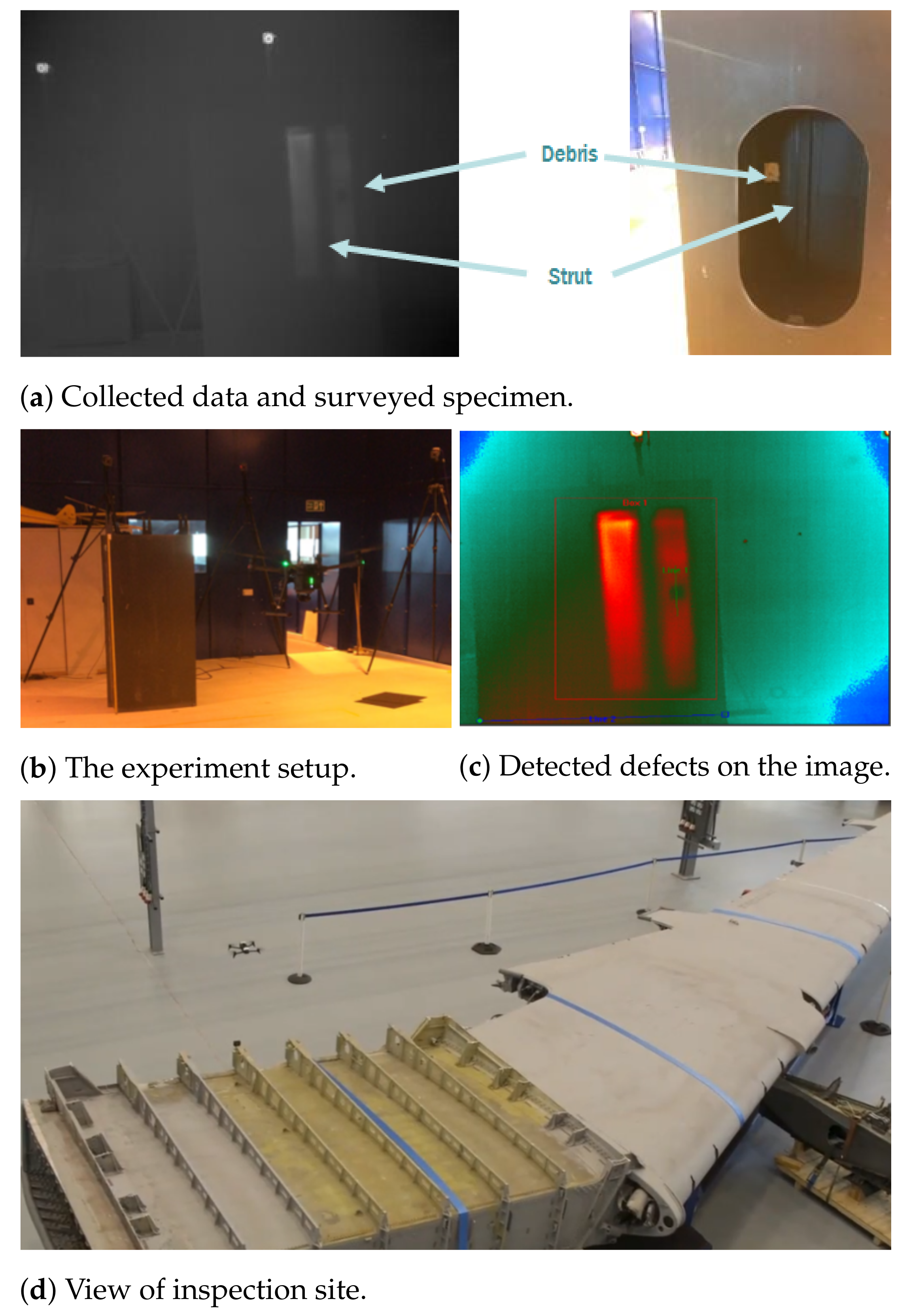
5.4. Aerial Inspection of Aircraft Wings
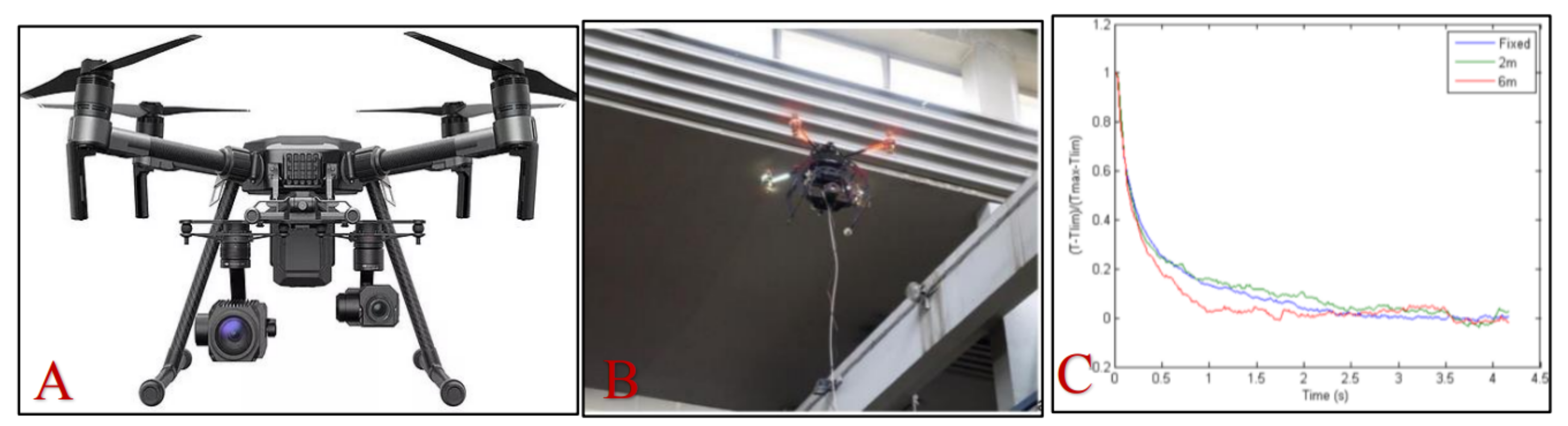
5.5. Autonomous Systems Imaging of Aerospace Structures
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Maldague, X. Theory and Practice of Infrared Technology for Nondestructive Testing; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Maldague, X.P.; Moore, P.O. Nondestructive Testing Handbook: Infrared and Thermal Testing, 3rd ed.; American Society for Nondestructive Testing: Columbus, OH, USA, 2001. [Google Scholar]
- Ibarra-Castanedo, C.; Tarpani, J.R.; Maldague, X.P. Nondestructive testing with thermography. Eur. J. Phys. 2013, 34, S91. [Google Scholar] [CrossRef]
- Jalal, M.F.A.; Sahari, K.S.M.; Aziz, M.A.; Yunos, K.; Anuar, A.; Ghani, M.F.A.; How, D.N.T. Design and development of robotic system for visual inspection of boiler tube inner surface. Procedia Comput. Sci. 2017, 105, 304–309. [Google Scholar] [CrossRef]
- Khaloo, A.; Lattanzi, D.; Cunningham, K.; Dell’Andrea, R.; Riley, M. Unmanned aerial vehicle inspection of the Placer River Trail Bridge through image-based 3D modelling. Struct. Infrastruct. Eng. 2018, 14, 124–136. [Google Scholar] [CrossRef]
- Shihavuddin, A.; Chen, X.; Fedorov, V.; Nymark Christensen, A.; Andre Brogaard Riis, N.; Branner, K.; Bjorholm Dahl, A.; Reinhold Paulsen, R. Wind turbine surface damage detection by deep learning aided drone inspection analysis. Energies 2019, 12, 676. [Google Scholar] [CrossRef] [Green Version]
- Mattar, R.A.; Kalai, R. Development of a wall-sticking drone for non-destructive ultrasonic and corrosion testing. Drones 2018, 2, 8. [Google Scholar] [CrossRef] [Green Version]
- Rossi, M.; Brunelli, D.; Adami, A.; Lorenzelli, L.; Menna, F.; Remondino, F. Gas-drone: Portable gas sensing system on UAVs for gas leakage localization. In Proceedings of the SENSORS, Valencia, Spain, 2–5 November 2014; pp. 1431–1434. [Google Scholar]
- Finn, A.; Scheding, S. Developments and challenges for autonomous unmanned vehicles. Intell. Syst. Ref. Libr. 2010, 3, 128–154. [Google Scholar]
- Newcome, L.R. Unmanned Aviation: A Brief History of Unmanned Aerial Vehicles; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2004. [Google Scholar]
- Nonami, K.; Kendoul, F.; Suzuki, S.; Wang, W.; Nakazawa, D. Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial Vehicles; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010; pp. 1–329. [Google Scholar] [CrossRef]
- Arjomandi, M.; Agostino, S.; Mammone, M.; Nelson, M.; Zhou, T. Classification of unmanned aerial vehicles. In Report for Mechanical Engineering Class; University of Adelaide: Adelaide, Australia, 2006. [Google Scholar]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Dempsey, M.E.; Rasmussen, S. Eyes of the Army–US Army Roadmap for Unmanned Aircraft Systems 2010–2035; US Army UAS Center of Excellence: Fort Rucker, AL, USA, 2010; Volume 9. [Google Scholar]
- Moore, G.K. What is a picture worth? A history of remote sensing/What is the value of an image? An overview of téléétection. Hydrol. Sci. Bull. 1979, 24, 477–485. [Google Scholar] [CrossRef] [Green Version]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jensen, R.R. Small-scale unmanned aerial vehicles in environmental remote sensing: Challenges and opportunities. GISci. Remote. Sens. 2011, 48, 99–111. [Google Scholar] [CrossRef]
- Martinez, K. The History of Drones (Drone History Timeline from 1849 To 2019). Available online: https://www.dronethusiast.com/history-of-drones (accessed on 11 May 2021).
- Mac, R.; Shao, H.; Bi, F. Bow to Your Billionaire Drone Overlord: Frank Wang’s Quest to Put DJI Robots into The Sky. Forbes. (2018.07.25). 2015. Available online: https://www.forbes.com/sites/ryanmac/2015/05/06/dji-drones-frank-wang-china-billionaire (accessed on 11 May 2021).
- Vempati, A.S.; Kamel, M.; Stilinovic, N.; Zhang, Q.; Reusser, D.; Sa, I.; Nieto, J.; Siegwart, R.; Beardsley, P. Paintcopter: An autonomous UAV for spray painting on three-dimensional surfaces. IEEE Robot. Autom. Lett. 2018, 3, 2862–2869. [Google Scholar] [CrossRef]
- Liu, P.; Chen, A.Y.; Huang, Y.N.; Han, J.Y.; Lai, J.S.; Kang, S.C.; Wu, T.H.; Wen, M.C.; Tsai, M.H. A review of rotorcraft unmanned aerial vehicle (UAV) developments and applications in civil engineering. Smart Struct. Syst. 2014, 13, 1065–1094. [Google Scholar] [CrossRef]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Kukko, A.; Heinonen, T. Remote sensing methods for power line corridor surveys. ISPRS J. Photogramm. Remote. Sens. 2016, 119, 10–31. [Google Scholar] [CrossRef] [Green Version]
- Rouse, M.; Earls, A.; Shea, S.; Wigmore, I. Drone (Unmanned Aerial Vehicle, UAV). Definition from WhatIs.com. 2016. Available online: https://internetofthingsagenda.techtarget.com/definition/drone (accessed on 2 March 2019).
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D city models: State of the art review. ISPRS Int. J. -Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Hernandez, J.; González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Mancera-Taboada, J. Image-based modelling from unmanned aerial vehicle (UAV) photogrammetry: An effective, low-cost tool for archaeological applications. Archaeometry 2015, 57, 128–145. [Google Scholar] [CrossRef]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An overview of Internet of Things (IoT) and data analytics in agriculture: Benefits and challenges. IEEE Internet Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]
- Sudevan, V.; Shukla, A.; Karki, H. Current and future research focus on inspection of vertical structures in oil and gas industry. In Proceedings of the 2018 18th International Conference on Control, Automation and Systems (ICCAS), PyeongChang, Korea, 17–20 October 2018; pp. 144–149. [Google Scholar]
- Mohamadi, F. Vertical Takeoff and Landing (VTOL) Small Unmanned Aerial System for Monitoring Oil and Gas Pipelines. US Patent 8,880,241, 4 November 2014. [Google Scholar]
- Li, Y.; Liu, C. Applications of multirotor drone technologies in construction management. Int. J. Constr. Manag. 2019, 19, 401–412. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y. Reviews of unmanned aerial vehicle (drone) technology trends and its applications in the mining industry. Geosyst. Eng. 2016, 19, 197–204. [Google Scholar] [CrossRef]
- Deng, C.; Wang, S.; Huang, Z.; Tan, Z.; Liu, J. Unmanned aerial vehicles for power line inspection: A cooperative way in platforms and communications. J. Commun. 2014, 9, 687–692. [Google Scholar] [CrossRef] [Green Version]
- Buerhop, C.; Pickel, T.; Dalsass, M.; Scheuerpflug, H.; Camus, C.; Brabec, C.J. aIR-PV-check: A quality inspection of PV-power plants without operation interruption. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 1677–1681. [Google Scholar]
- Teubner, J.; Kruse, I.; Scheuerpflug, H.; Buerhop-Lutz, C.; Hauch, J.; Camus, C.; Brabec, C.J. Comparison of drone-based IR-imaging with module resolved monitoring power data. Energy Procedia 2017, 124, 560–566. [Google Scholar] [CrossRef]
- Zefri, Y.; ElKettani, A.; Sebari, I.; Ait Lamallam, S. Thermal infrared and visual inspection of photovoltaic installations by UAV photogrammetry—Application case: Morocco. Drones 2018, 2, 41. [Google Scholar] [CrossRef] [Green Version]
- Peled, A.; Appelbaum, J. Minimizing the current mismatch resulting from different locations of solar cells within a PV module by proposing new interconnections. Sol. Energy 2016, 135, 840–847. [Google Scholar] [CrossRef]
- Forniés, E.; Naranjo, F.; Mazo, M.; Ruiz, F. The influence of mismatch of solar cells on relative power loss of photovoltaic modules. Sol. Energy 2013, 97, 39–47. [Google Scholar] [CrossRef]
- Silvestre, S.; Boronat, A.; Chouder, A. Study of bypass diodes configuration on PV modules. Appl. Energy 2009, 86, 1632–1640. [Google Scholar] [CrossRef]
- Djordjevic, S.; Parlevliet, D.; Jennings, P. Detectable faults on recently installed solar modules in Western Australia. Renew. Energy 2014, 67, 215–221. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Garcia, J.; Pozza, A.; Sample, T. Long-term soiling of silicon PV modules in a moderate subtropical climate. Sol. Energy 2016, 130, 174–183. [Google Scholar] [CrossRef]
- Sinha, A.; Sastry, O.; Gupta, R. Detection and characterisation of delamination in PV modules by active infrared thermography. Nondestruct. Test. Eval. 2016, 31, 1–16. [Google Scholar] [CrossRef]
- Meyer, S.; Richter, S.; Timmel, S.; Gläser, M.; Werner, M.; Swatek, S.; Hagendorf, C. Snail trails: Root cause analysis and test procedures. Energy Procedia 2013, 38, 498–505. [Google Scholar] [CrossRef]
- Quater, P.B.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light Unmanned Aerial Vehicles (UAVs) for cooperative inspection of PV plants. IEEE J. Photovoltaics 2014, 4, 1107–1113. [Google Scholar] [CrossRef] [Green Version]
- Tsanakas, J.A.; Ha, L.D.; Al Shakarchi, F. Advanced inspection of photovoltaic installations by aerial triangulation and terrestrial georeferencing of thermal/visual imagery. Renew. Energy 2017, 102, 224–233. [Google Scholar] [CrossRef]
- Alshayeb, M.; Chang, J. Variations of PV Panel Performance Installed over a Vegetated Roof and a Conventional Black Roof. Energies 2018, 11, 1110. [Google Scholar] [CrossRef] [Green Version]
- Tsanakas, J.A.; Ha, L.; Buerhop, C. Faults and infrared thermographic diagnosis in operating c-Si photovoltaic modules: A review of research and future challenges. Renew. Sustain. Energy Rev. 2016, 62, 695–709. [Google Scholar] [CrossRef]
- Gallardo-Saavedra, S.; Hernández-Callejo, L.; Duque-Perez, O. Technological review of the instrumentation used in aerial thermographic inspection of photovoltaic plants. Renew. Sustain. Energy Rev. 2018, 93, 566–579. [Google Scholar] [CrossRef]
- Grimaccia, F.; Aghaei, M.; Mussetta, M.; Leva, S.; Quater, P.B. Planning for PV plant performance monitoring by means of unmanned aerial systems (UAS). Int. J. Energy Environ. Eng. 2015, 6, 47–54. [Google Scholar] [CrossRef] [Green Version]
- Buerhop, C.; Weißmann, R.; Scheuerpflug, H.; Auer, R.; Brabec, C. Quality control of PV-modules in the field using a remote-controlled drone with an infrared camera. In Proceedings of the 27th European Photovoltaic Solar Energy Conference and Exhibition (EU PVSEC 2012), Frankfurt, Germany, 24 September 2012; Volume 1, pp. 3370–3373. [Google Scholar]
- Koch, S.; Weber, T.; Sobottka, C.; Fladung, A.; Clemens, P.; Berghold, J. Outdoor Electroluminescence Imaging of Crystalline Photovoltaic Modules: Comparative Study between Manual Ground-Level Inspections and Drone-Based Aerial Surveys. In Proceedings of the 32nd European Photovoltaic Solar Energy Conference and Exhibition, München, Germany, 21–24 June 2016; Volume 53, pp. 1736–1740. [Google Scholar] [CrossRef]
- Aghaei, M.; Madukanya, E.U.; de Oliveira, A.K.V.; Rüther, R. Fault inspection by aerial infrared thermography in a pv plant after a meteorological tsunami. In Proceedings of the VII Congresso Brasileiro de Energia Solar-CBENS, Gramado, Brazil, 17–20 April 2018; Volume 2018. [Google Scholar]
- Leva, S.; Aghaei, M.; Grimaccia, F. PV power plant inspection by UAS: Correlation between altitude and detection of defects on PV modules. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 1921–1926. [Google Scholar]
- Aghaei, M.; Leva, S.; Grimaccia, F. PV power plant inspection by image mosaicing techniques for IR real-time images. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 3100–3105. [Google Scholar]
- Alsafasfeh, M.; Abdel-Qader, I.; Bazuin, B.; Alsafasfeh, Q.; Su, W. Unsupervised fault detection and analysis for large photovoltaic systems using drones and machine vision. Energies 2018, 11, 2252. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; An, K.E.; Jeon, B.D.; Cho, K.Y.; Lee, S.J.; Seo, D. Detecting faulty solar panels based on thermal image processing. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–2. [Google Scholar]
- Taqi, A.; Beryozkina, S. Overhead Transmission Line Thermographic Inspection Using a Drone. In Proceedings of the 2019 IEEE 10th GCC Conference &Exhibition (GCC), Kuwait, Kuwait, 19–23 April 2019; pp. 1–6. [Google Scholar]
- Mirallès, F.; Hamelin, P.; Lambert, G.; Lavoie, S.; Pouliot, N.; Montfrond, M.; Montambault, S. LineDrone Technology: Landing an unmanned aerial vehicle on a power line. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6545–6552. [Google Scholar]
- Hamelin, P.; Miralles, F.; Lambert, G.; Lavoie, S.; Pouliot, N.; Montfrond, M.; Montambault, S. Discrete-time control of LineDrone: An assisted tracking and landing UAV for live power line inspection and maintenance. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems, ICUAS, Atlanta, GA, USA, 11–14 June 2019; pp. 292–298. [Google Scholar] [CrossRef]
- Park, J.Y.; Kim, S.T.; Lee, J.K.; Ham, J.W.; Oh, K.Y. Automatic Inspection Drone with Deep Learning-based Auto-tracking Camera Gimbal to Detect Defects in Power Lines. In Proceedings of the 3rd International Conference on Vision, Image and Signal Processing, Vancouver, BC, Canada, 26–28 August 2019; pp. 1–6. [Google Scholar]
- Wang, B.; Chen, X.; Wang, Q.; Liu, L.; Zhang, H.; Li, B. Power line inspection with a flying robot. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010. [Google Scholar]
- Green, J. Mine rescue robots requirements outcomes from an industry workshop. In Proceedings of the 2013 6th Robotics and Mechatronics Conference (RobMech), KwaZulu-Natal, South Africa, 30–31 October 2013; pp. 111–116. [Google Scholar]
- Dunnington, L.; Nakagawa, M. Fast and safe gas detection from underground coal fire by drone fly over. Environ. Pollut. 2017, 229, 139–145. [Google Scholar] [CrossRef]
- Carvalho, R.; Nascimento, R.; D’Angelo, T.; Delabrida, S.; GC Bianchi, A.; Oliveira, R.A.; Azpúrua, H.; Uzeda Garcia, L.G. A UAV-based framework for semi-automated thermographic inspection of belt conveyors in the mining industry. Sensors 2020, 20, 2243. [Google Scholar] [CrossRef] [Green Version]
- Cajzek, R.; Klanšek, U. An unmanned aerial vehicle for multi-purpose tasks in construction industry. J. Appl. Eng. Sci. 2016, 14, 314–327. [Google Scholar] [CrossRef] [Green Version]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Hubbard, B.; Wang, H.; Leasure, M.; Ropp, T.; Lofton, T.; Hubbard, S.; Lin, S. Feasibility study of UAV use for RFID material tracking on construction sites. In Proceedings of the 51st ASC Annual International Conference, College Station, TX, USA, 22–25 April 2015; pp. 669–676. [Google Scholar]
- Fang, Y.; Chen, J.; Cho, Y.; Zhang, P. A point cloud-vision hybrid approach for 3D location tracking of mobile construction assets. In Proceedings of the 33rd International Symposium on Automation and Robotics in Construction (ISARC 2016), Auburn, AL, USA, 18–21 July 2016; Volume 33, pp. 1–7. [Google Scholar]
- Hardin, B.; McCool, D. BIM and Construction Management: Proven Tools, Methods, and Workflows; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Tezel, B.; Aziz, Z. From conventional to IT based visual management: A conceptual discussion for lean construction. J. Inf. Technol. Constr. 2017, 22, 220–246. [Google Scholar]
- Wang, J.; Sun, W.; Shou, W.; Wang, X.; Wu, C.; Chong, H.Y.; Liu, Y.; Sun, C. Integrating BIM and LiDAR for real-time construction quality control. J. Intell. Robot. Syst. 2015, 79, 417–432. [Google Scholar] [CrossRef]
- Price, T.J. James Blyth—Britain’s first modern wind power pioneer. Wind Eng. 2005, 29, 191–200. [Google Scholar] [CrossRef]
- Righter, R.W. Wind Energy in America: A History; University of Oklahoma Press: Norman, OK, USA, 1996. [Google Scholar]
- Kulsinskas, A.; Durdevic, P.; Ortiz-Arroyo, D. Internal Wind Turbine Blade Inspections Using UAVs: Analysis and Design Issues. Energies 2021, 14, 294. [Google Scholar] [CrossRef]
- Reddy, A.; Indragandhi, V.; Ravi, L.; Subramaniyaswamy, V. Detection of Cracks and damage in wind turbine blades using artificial intelligence-based image analytics. Measurement 2019, 147, 106823. [Google Scholar] [CrossRef]
- Yang, W.; Peng, Z.; Wei, K.; Tian, W. Structural health monitoring of composite wind turbine blades: Challenges, issues and potential solutions. IET Renew. Power Gener. 2017, 11, 411–416. [Google Scholar] [CrossRef] [Green Version]
- Hahn, B.; Durstewitz, M.; Rohrig, K. Reliability of wind turbines. In Wind Energy; Springer: Berlin/Heidelberg, Germany, 2007; pp. 329–332. [Google Scholar]
- Sørensen, B.F.; Lading, L.; Sendrup, P. Fundamentals for Remote Structural Health Monitoring of Wind Turbine Blades—A Pre-Project; Risoe National Lab.: Roskilde, Denmark, May 2002. [Google Scholar]
- Mishnaevsky, L.; Branner, K.; Petersen, H.N.; Beauson, J.; McGugan, M.; Sørensen, B.F. Materials for wind turbine blades: An overview. Materials 2017, 10, 1285. [Google Scholar] [CrossRef] [Green Version]
- Elkmann, N.; Felsch, T.; Förster, T. Robot for rotor blade inspection. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010. [Google Scholar]
- Martin, R.W.; Sabato, A.; Schoenberg, A.; Giles, R.H.; Niezrecki, C. Comparison of nondestructive testing techniques for the inspection of wind turbine blades’ spar caps. Wind. Energy 2018, 21, 980–996. [Google Scholar] [CrossRef]
- Meinlschmidt, P.; Aderhold, J. Thermographic inspection of rotor blades. In Proceedings of the 9th European Conference on NDT, Berlin, Germany, 25–29 September 2006. [Google Scholar]
- Li, X.l.; Sun, J.; Tao, N.; Feng, L.; Shen, J.l.; He, Y.; Zhang, C.; Zhao, Y.j. An effective method to inspect adhesive quality of wind turbine blades using transmission thermography. J. Nondestruct. Eval. 2018, 37, 1–11. [Google Scholar] [CrossRef]
- Fauteux, L.; Jolin, N. Drone Solutions for Wind Turbine Inspections; Technical Report; Nergica: Gaspe, QC, Canada, December 2018. [Google Scholar]
- Poleo, K.K.; Crowther, W.J.; Barnes, M. Estimating the impact of drone-based inspection on the Levelised Cost of electricity for offshore wind farms. Results Eng. 2021, 9, 100201. [Google Scholar] [CrossRef]
- Murphy, J.T.; Mishra, D.; Silliman, G.R.; Kumar, V.P.; Mandayam, S.T.; Sharma, P. Method and System for Wind Turbine Inspection. US Patent App. 13/021,056, 8 May 2012. [Google Scholar]
- Pedersen, H. Internal Inspection of a Wind Turbine. European Patent EP3287367A1, 28 February 2018. [Google Scholar]
- Denhof, D.; Staar, B.; Lütjen, M.; Freitag, M. Automatic optical surface inspection of wind turbine rotor blades using convolutional neural networks. Procedia CIRP 2019, 81, 1166–1170. [Google Scholar] [CrossRef]
- Ellenberg, A.; Kontsos, A.; Bartoli, I.; Pradhan, A. Masonry crack detection application of an unmanned aerial vehicle. Comput. Civ. Build. Eng. 2014, 2014, 1788–1795. [Google Scholar]
- Phung, M.D.; Dinh, T.H.; Hoang, V.T.; Ha, Q.P. Automatic crack detection in built infrastructure using unmanned aerial vehicles. In Proceedings of the 34th International Symposium on Automation and Robotics in Construction (ISARC), Taipei, Taiwan, 28 June– July 2017; pp. 823–829. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.W.; Kim, S.B.; Park, J.C.; Nam, J.W. Development of Crack Detection System with Unmanned Aerial Vehicles and Digital Image Processing. Adv. Struct. Eng. Mech. (ASEM15) 2015, 33, 1–11. [Google Scholar]
- Lee, E.J.; Shin, S.Y.; Ko, B.C.; Chang, C. Early sinkhole detection using a drone-based thermal camera and image processing. Infrared Phys. Technol. 2016, 78, 223–232. [Google Scholar] [CrossRef]
- Ge, J.; Luo, Y.; Tei, G. Real-time pedestrian detection and tracking at nighttime for driver-assistance systems. IEEE Trans. Intell. Transp. Syst. 2009, 10, 283–298. [Google Scholar]
- Shakmak, B.; Al-Habaibeh, A. Detection of water leakage in buried pipes using infrared technology; A comparative study of using high and low resolution infrared cameras for evaluating distant remote detection. In Proceedings of the 2015 IEEE Jordan Conference on Applied Electrical Engineering and Computing Technologies, AEECT 2015, Amman, Jordan, 3–5 November 2015; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Valente, J.; Roldán, J.J.; Garzón, M.; Barrientos, A. Towards Airborne Thermography via Low-Cost Thermopile Infrared Sensors. Drones 2019, 3, 30. [Google Scholar] [CrossRef] [Green Version]
- Wiggenhauser, H. Active IR-applications in civil engineering. Infrared Phys. Technol. 2002, 43, 233–238. [Google Scholar] [CrossRef]
- Wild, W. Application of infrared thermography in civil engineering. Proc. Est. Acad. Sci. Eng. 2007, 13, 436–444. [Google Scholar]
- De Dios, J.M.; Ollero, A.; Ferruz, J. Infrared inspection of buildings using autonomous helicopters. IFAC Proc. Vol. 2006, 39, 602–607. [Google Scholar] [CrossRef]
- Rocha, J.; Santos, C.; Póvoas, Y. Evaluation of the infrared thermography technique for capillarity moisture detection in buildings. Procedia Struct. Integr. 2018, 11, 107–113. [Google Scholar] [CrossRef]
- Ortiz-Sanz, J.; Gil-Docampo, M.; Arza-García, M.; Cañas-Guerrero, I. IR Thermography from UAVs to Monitor Thermal Anomalies in the Envelopes of Traditional Wine Cellars: Field Test. Remote Sens. 2019, 11, 1424. [Google Scholar] [CrossRef]
- Ficapal, A.; Mutis, I. Framework for the detection, diagnosis, and evaluation of thermal bridges using infrared thermography and unmanned aerial vehicles. Buildings 2019, 9, 179. [Google Scholar] [CrossRef] [Green Version]
- Entrop, A.; Vasenev, A. Infrared drones in the construction industry: Designing a protocol for building thermography procedures. Energy Procedia 2017, 132, 63–68. [Google Scholar] [CrossRef]
- Wang, C.; Peng, Y.; Cho, Y.; Li, H. As-built residential building information collection and modeling methods for energy analysis. In Proceedings of the 28th International Symposium on Automation and Robotics in Construction (ISARC), Seoul, Korea, 29 June–2 July 2011; pp. 227–232. [Google Scholar]
- Duane, C.B. Close-range camera calibration. Photogramm. Eng 1971, 37, 855–866. [Google Scholar]
- González-Aguilera, D.; Lagueela, S.; Rodriguez-Gonzálvez, P.; Hernández-López, D. Image-based thermographic modeling for assessing energy efficiency of buildings façades. Energy Build. 2013, 65, 29–36. [Google Scholar] [CrossRef]
- Morel, J.M.; Yu, G. ASIFT: A new framework for fully affine invariant image comparison. SIAM J. Imaging Sci. 2009, 2, 438–469. [Google Scholar] [CrossRef]
- Lin, W.; Yoda, T. Bridge Engineering: Classifications, Design Loading, and Analysis Methods; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar]
- Murao, S.; Nomura, Y.; Furuta, H.; Kim, C.W. Concrete crack detection using UAV and deep learning. In Proceedings of the 13th International Conference on Applications of Statistics and Probability in Civil Engineering, ICASP 2019, Seoul, Korea, 26–60 May 2019. [Google Scholar]
- Hubbard, B.; Hubbard, S. Unmanned Aircraft Systems (UAS) for Bridge Inspection Safety. Drones 2020, 4, 40. [Google Scholar] [CrossRef]
- Seo, J.; Duque, L.; Wacker, J. Drone-enabled bridge inspection methodology and application. Autom. Constr. 2018, 94, 112–126. [Google Scholar] [CrossRef]
- Duque, L.; Seo, J.; Wacker, J. Timber Bridge Inspection Using UAV. In Proceedings of the Structures Congress 2018: Bridges, Transportation Structures, and Nonbuilding Structures-Selected Papers from the Structures Congress, Fort Worth, TX, USA, 19–21 April 2018; pp. 186–196. [Google Scholar] [CrossRef]
- Chan, B.; Guan, H.; Jo, J.; Blumenstein, M. Towards UAV-based bridge inspection systems: A review and an application perspective. Struct. Monit. Maint. 2015, 2, 283–300. [Google Scholar] [CrossRef]
- Gucunski, N.; Council, N.R. Nondestructive Testing to Identify Concrete Bridge Deck Deterioration; Transportation Research Board of The National Academies: Washington, DC, USA, 2013. [Google Scholar]
- Cheng, C.; Shang, Z.; Shen, Z. Automatic delamination segmentation for bridge deck based on encoder-decoder deep learning through UAV-based thermography. NDT E Int. 2020, 116, 102341. [Google Scholar] [CrossRef]
- General Secretariat of the Council (Council of the European Union). 2021. Available online: http://aei.pitt.edu/56818/1/ttr-2014-17.pdf (accessed on 28 April 2021).
- Pinto, L.R.; Vale, A.; Brouwer, Y.; Borbinha, J.; Corisco, J.; Ventura, R.; Silva, A.M.; Mourato, A.; Marques, G.; Romanets, Y.; et al. Radiological Scouting, Monitoring and Inspection Using Drones. Sensors 2021, 21, 3143. [Google Scholar] [CrossRef] [PubMed]
- Boudergui, K.; Carrel, F.; Domenech, T.; Guenard, N.; Poli, J.P.; Ravet, A.; Schoepff, V.; Woo, R. Development of a drone equipped with optimized sensors for nuclear and radiological risk characterization. In Proceedings of the 2011 2nd International Conference on Advancements in Nuclear Instrumentation, Measurement Methods and their Applications, Ghent, Belgium, 6–9 June 2011; pp. 1–9. [Google Scholar]
- Brunelli, D.; Pino, F.; Fontana, C.L.; Pancheri, L.; Moretto, S. DRAGoN: Drone for Radiation detection of Gammas and Neutrons. In Proceedings of the 2020 IEEE Sensors, Rotterdam, The Netherlands, 25–28 October 2020; pp. 1–4. [Google Scholar]
- Aleotti, J.; Micconi, G.; Caselli, S.; Benassi, G.; Zambelli, N.; Bettelli, M.; Zappettini, A. Detection of nuclear sources by UAV teleoperation using a visuo-haptic augmented reality interface. Sensors 2017, 17, 2234. [Google Scholar] [CrossRef] [Green Version]
- Okuyama, S.i.; Torii, T.; Suzuki, A.; Shibuya, M.; Miyazaki, N. A remote radiation monitoring system using an autonomous unmanned helicopter for nuclear emergencies. J. Nucl. Sci. Technol. 2008, 45, 414–416. [Google Scholar] [CrossRef] [Green Version]
- Martin, P.G.; Payton, O.D.; Fardoulis, J.S.; Richards, D.A.; Scott, T.B. The use of unmanned aerial systems for the mapping of legacy uranium mines. J. Environ. Radioact. 2015, 143, 135–140. [Google Scholar] [CrossRef] [Green Version]
- Sanada, Y.; Torii, T. Aerial radiation monitoring around the Fukushima Dai-ichi nuclear power plant using an unmanned helicopter. J. Environ. Radioact. 2015, 139, 294–299. [Google Scholar] [CrossRef]
- Morgenthal, G.; Hallermann, N. Quality assessment of Unmanned Aerial Vehicle (UAV) based visual inspection of structures. Adv. Struct. Eng. 2014, 17, 289–302. [Google Scholar] [CrossRef]
- Laefer, D.F.; Gannon, J.; Deely, E. Reliability of crack detection methods for baseline condition assessments. J. Infrastruct. Syst. 2010, 16, 129–137. [Google Scholar] [CrossRef]
- Fujino, Y. Issues and prospects of sensing and monitoring technology. Railw. Res. Rev. (RRR) 2013, 70, 4–9. [Google Scholar]
- Ogawa, S.; Kameda, K.; Sato, H.; Mita, A. Research on Practical Application of Structural Health Monitoring-Construction of Infrastructure System Including Data Model; Japan Earthquake Engineering Association: Tokyo, Japan, 2009; Volume 9. [Google Scholar]
- Europe, S.P. Global Market Outlook for Solar Power 2015–2019; Euoropean Photovoltaic Industry Association: Bruxelles, Belgium, 2015. [Google Scholar]
- Canada, T.; Group, P. National Highway System. 2011. Available online: https://www.tc.gc.ca/eng/policy/acg-acgd-menu-highways-2149.htm (accessed on 11 May 2021).
- Libra, M.; Daneček, M.; Lešetický, J.; Poulek, V.; Sedláček, J.; Beránek, V. Monitoring of defects of a photovoltaic power plant using a drone. Energies 2019, 12, 795. [Google Scholar] [CrossRef] [Green Version]
- Jones, H.G.; Serraj, R.; Loveys, B.R.; Xiong, L.; Wheaton, A.; Price, A.H. Thermal infrared imaging of crop canopies for the remote diagnosis and quantification of plant responses to water stress in the field. Funct. Plant Biol. 2009, 36, 978. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- López-Fernández, L.; Lagüela, S.; Picón, I.; González-Aguilera, D. Large scale automatic analysis and classification of roof surfaces for the installation of solar panels using a multi-sensor aerial platform. Remote Sens. 2015, 7, 11226–11248. [Google Scholar] [CrossRef] [Green Version]
- Sato, Y.; Ozawa, S.; Terasaka, Y.; Kaburagi, M.; Tanifuji, Y.; Kawabata, K.; Miyamura, H.N.; Izumi, R.; Suzuki, T.; Torii, T. Remote radiation imaging system using a compact gamma-ray imager mounted on a multicopter drone. J. Nucl. Sci. Technol. 2018, 55, 90–96. [Google Scholar] [CrossRef]
- Ashour, R.; Taha, T.; Mohamed, F.; Hableel, E.; Kheil, Y.A.; Elsalamouny, M.; Kadadha, M.; Rangan, K.; Dias, J.; Seneviratne, L.; et al. Site inspection drone: A solution for inspecting and regulating construction sites. In Proceedings of the 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Dhabi, United Arab Emirates, 16–19 October 2016; pp. 1–4. [Google Scholar]
- Kruglova, T.; Sayfeddine, D.; Vitaliy, K. Robotic laser inspection of airplane wings using quadrotor. Procedia Eng. 2015, 129, 245–251. [Google Scholar] [CrossRef] [Green Version]
- Sappington, R.N.; Acosta, G.A.; Hassanalian, M.; Lee, K.; Morelli, R. Drone stations in airports for runway and airplane inspection using image processing techniques. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 3316. [Google Scholar]
- Colantonio, A.; McIntosh, G. The differences between large buildings and residential infrared thermographic inspections is like night and day. In Proceedings of the 11th Canadian Conference on Building Science and Technology, London, ON, Canada, 6–8 November 2007; p. 13. [Google Scholar]
- Lizarazo, I.; Angulo, V.; Rodríguez, J. Automatic mapping of land surface elevation changes from UAV-based imagery. Int. J. Remote Sens. 2017, 38, 2603–2622. [Google Scholar] [CrossRef]
- Kim, D.; Youn, J.; Kim, C. Automatic fault recognition of photovoltaic modules based on statistical analysis of UAV thermography. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, 42, 179. [Google Scholar] [CrossRef] [Green Version]
- Volkmann, W.; Barnes, G. Virtual Surveying: Mapping and Modeling Cadastral Boundaries Using Unmanned Aerial Systems (UAS) Virtual Surveying: Mapping and Modeling Cadastral Boundaries Using Unmanned Aerial Systems (UAS). In Proceedings of the FIG Congress 2014: Engaging the Challenges-Enhancing the Relevance, Kuala Lumpur, Malaysia, 17–19 June 2014; pp. 1–8. [Google Scholar]
- Lagüela, S.; D’iaz, L.; Roca, D.; Lorenzo, H. Aerial thermography from low-cost UAV for the generation of thermographic digital terrain models. Opto-Electron. Rev. 2015, 23, 78–84. [Google Scholar] [CrossRef] [Green Version]
- Roca, D.; Lagüela, S.; Díaz-Vilariño, L.; Armesto, J.; Arias, P. Low-cost aerial unit for outdoor inspection of building façades. Autom. Constr. 2013, 36, 128–135. [Google Scholar] [CrossRef]
- Fox, M.; Coley, D.; Goodhew, S.; De Wilde, P. Thermography methodologies for detecting energy related building defects. Renew. Sustain. Energy Rev. 2014, 40, 296–310. [Google Scholar] [CrossRef] [Green Version]
- Barreira, E.; de Freitas, V.P. Evaluation of building materials using infrared thermography. Constr. Build. Mater. 2007, 21, 218–224. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2006; pp. 404–417. [Google Scholar]
- Jakubović, A.; Velagić, J. Image Feature Matching and Object Detection Using Brute-Force Matchers. In Proceedings of the 2018 International Symposium ELMAR, Zadar, Croatia, 16–19 September 2018; pp. 83–86. [Google Scholar]
- Nooralishahi, P.; Deane, S.; Lopez, F.; Ibarra-Castanedo, C.; Avdelidis, N.P.; Maldague, X. Reflectivity detection and reduction of thermographic images using image stitching technique and its applications on remote inspection. In Proceedings of the Thermosense: Thermal Infrared Applications XLII. International Society for Optics and Photonics, Bellingham, WA, USA, 17 June 2020; Volume 11409, p. 114090U. [Google Scholar]
- Shraeyas. Shraeyas/Drone-Image-Stitching. 2019. Available online: https://github.com/Shraeyas/Drone-Image-Stitching (accessed on 11 May 2021).
- SenseFly. Solar Panel Installation Dataset. 2019. Available online: https://www.sensefly.com/education/datasets/?dataset=1416 (accessed on 11 May 2021).
- Spannbauer, A. Python Video Stabilization with OpenCV. Available online: https://adamspannbauer.github.io/python_video_stab/html/index.html (accessed on 11 May 2021).
- Grundmann, M.; Kwatra, V.; Essa, I. Auto-directed video stabilization with robust l1 optimal camera paths. Proceedings of IEEE Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20 June 2011; pp. 225–232. [Google Scholar]
- Neph, R. Offline Optimization-Based Video Stabilization. 2019. Available online: https://ryanneph.netlify.app/experience/video-stabilization (accessed on 11 May 2021).
- Nooralishahi, P.; López, F.; Maldague, X. A Drone-Enabled Approach for Gas Leak Detection Using Optical Flow Analysis. Appl. Sci. 2021, 11, 1412. [Google Scholar] [CrossRef]
- Milovanović, B.; Gaši, M.; Gumbarević, S. Principal Component Thermography for Defect Detection in Concrete. Sensors 2020, 20, 3891. [Google Scholar] [CrossRef]
- Maldague, X.; Galmiche, F.; Ziadi, A. Advances in pulsed phase thermography. Infrared Phys. Technol. 2002, 43, 175–181. [Google Scholar] [CrossRef] [Green Version]
- Deane, S.; Avdelidis, N.P.; Ibarra-Castanedo, C.; Zhang, H.; Nezhad, H.Y.; Williamson, A.A.; Mackley, T.; Davis, M.J.; Maldague, X.; Tsourdos, A. Application of NDT thermographic imaging of aerospace structures. Infrared Phys. Technol. 2019, 97, 456–466. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Size | MG /TW (lbs.) | NOA (ft.) | Airspeed (Knots) |
|---|---|---|---|---|
| Group 1 | Small | 0–20 | <1200 AGL * | <100 |
| Group 2 | Medium | 21–55 | <3500 AGL | <250 |
| Group 3 | Large | <1320 | <18,000 MSL ** | <250 |
| Group 4 | Larger | >1320 | <18,000 MSL | Any airspeed |
| Group 5 | Largest | >1320 | >18,000 MSL | Any airspeed |
| Group | Weight |
|---|---|
| Super heavy | 2000 kg |
| Heavy | 200 kg < kg |
| Medium | 50 kg < kg |
| Light | 5 kg < kg |
| Micro | 5 kg |
| Group | Wing Span | Weight |
|---|---|---|
| Smart Dusts | 1 mm cm | 0.005 g g |
| Pico-Air Vehicles | 0.25 cm cm | 0.5 g g |
| Nano-Air Vehicles | 2.5 cm cm | 3 g g |
| Micro-Air Vehicles | 15 cm m | 50 g kg |
| UAV | 1 m m | 2 kg kg |
| UAV | 2 m m | 5 kg 15,000 kg |
| Ground Resolution | RGB: 2 cm/pix, Thermal: 11 cm/pix |
|---|---|
| Coverage | 7.5 ha, (17.3 acres) |
| Flight height | 84 m, (275.4 ft) |
| Number of images | RGB: 277 images, Thermal: 277 images |
| Metrics | Original | AVS | L1-OP | PC-RF | OPC | |
|---|---|---|---|---|---|---|
| Scenario #1 | PSNR * (min–max) | 70.94–110.83 | 71.27–106.2 | 69.16–107.36 | 65.09–111.95 | 72.88–110.33 |
| ITF ** | 74.36 | 74.87 | 73.76 | 80.15 | 76.32 | |
| ISI | 0.532 | 0.544 | 0.504 | 0.726 | 0.568 | |
| AvSpeed | 0.1928 | 0.20 | 0.215 | 0.356 | 0.1526 | |
| Scenario #2 | PSNR (min–max) | 58.23–78.97 | 58.65–85.82 | 58.21–82.92 | 58.65–69.76 | – |
| ITF | 61.83 | 62.30 | 63.17 | 63.16 | – | |
| ISI | 0.427 | 0.52 | 0.64 | 0.56 | – | |
| AvSpeed | 1.559 | 1.05 | 0.565 | 0.41 | – | |
| Scenario #3 | PSNR (min–max) | 69.96–63.99 | 65.02–88.85 | – | 63.22–132.46 | 65.40–87.40 |
| ITF | 66.74 | 70.24 | – | 80.8 | 71.27 | |
| ISI | 0.159 | 0.402 | – | 0.6 | 0.14 | |
| AvSpeed | 1.06 | 0.5814 | – | 0.386 | 0.621 | |
| Scenario #4 | PSNR (min–max) | 58.43–68.5 | 63.46–71.56 | 59–69.65 | 59.46–91.82 | 62.24–248.9 |
| ITF | 64.47 | 66.72 | 64.56 | 68.63 | 81.91 | |
| ISI | 0.1121 | 0.24 | 0.1220 | 0.2718 | 0.1281 | |
| AvSpeed | 4.92 | 2.2356 | 1.6196 | 2.401 | 1.60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nooralishahi, P.; Ibarra-Castanedo, C.; Deane, S.; López, F.; Pant, S.; Genest, M.; Avdelidis, N.P.; Maldague, X.P.V. Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies. Drones 2021, 5, 106. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5040106
Nooralishahi P, Ibarra-Castanedo C, Deane S, López F, Pant S, Genest M, Avdelidis NP, Maldague XPV. Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies. Drones. 2021; 5(4):106. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5040106
Chicago/Turabian StyleNooralishahi, Parham, Clemente Ibarra-Castanedo, Shakeb Deane, Fernando López, Shashank Pant, Marc Genest, Nicolas P. Avdelidis, and Xavier P. V. Maldague. 2021. "Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies" Drones 5, no. 4: 106. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5040106