
Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G
by
 , , and
, , and
Sudheesh Puthenveettil Gopi
1,
Maurizio Magarini
2 ,
,
Saeed Hamood Alsamhi
3,4,* and
and
Alexey V. Shvetsov
5,6 1
Department of E&C, Manipal Institute of Technology, Manipal Academy of Higher Education, Manipal 576104, India
2
Department of Electronics, Information, and Bioengineering, Politecnico di Milano, 20133 Milan, Italy
3
Software Research Institute, Technological University of Shannon, N37HD68 Athlone, Ireland
4
Faculty of Engineering, IBB University, Ibb 70270, Yemen
5
Department of Operation of Road Transport and Car Service, North-Eastern Federal University, 677000 Yakutsk, Russia
6
Department of Transport and Technological Processes, Vladivostok State University of Economics and Service, 690014 Vladivostok, Russia
*
Author to whom correspondence should be addressed.
Drones 2021, 5(4), 128; https://0-doi-org.brum.beds.ac.uk/10.3390/drones5040128
Submission received: 5 October 2021
/
Revised: 21 October 2021
/
Accepted: 22 October 2021
/
Published: 29 October 2021
(This article belongs to the Special Issue Unmanned Aerial Vehicle-Assisted Cooperative Air and Ground Communications)
Abstract
:The fundamental issue for Beyond fifth Generation (B5G) is providing a pervasive connection to heterogeneous and various devices in smart environments. Therefore, Drones play a vital role in the B5G, allowing for wireless broadcast and high-speed communications. In addition, the drone offers several advantages compared to fixed terrestrial communications, including flexible deployment, robust Line of Sight (LoS) connections, and more design degrees of freedom due to controlled mobility. Drones can provide reliable and high data rate connectivity to users irrespective of their location. However, atmospheric disturbances impact the signal quality between drones and users and degrade the system performance. Considering practical implementation, the location of drones makes the drone–user communication susceptible to several environmental disturbances. In this paper, we evaluate the performance of drone-user connectivity during atmospheric disturbances. Further, a Machine Learning (ML)-assisted algorithm is proposed to adapt to a modulation technique that offers optimal performance during atmospheric disturbances. The results show that, with the algorithm, the system switches to a lower order modulation scheme during higher rain rate and provides reliable communication with optimized data rate and error performance.
1. Introduction
Beyond fifth Generation (B5G) network demands ensuring accessibility for all types of users and devices. Drones play a vital role in cooperating in high-speed communications and facilitating an extensive coverage of wireless networks. Flexible positioning, Line of Sight (LoS) connectivity, possibility of smart decision, and association with fixed communication systems are advantages of drones [1,2]. In addition, numerous drones can provide specialized coverage for end devices in smart environments and unreachable areas. Expanding communication coverage has become an inevitable trend in developing smart cities, as the future B5G Internet of Things (IoT) networks need ultra-high coverage. Drones are now one of the most effective ways for improving communication coverage due to the significant cost and time reduction involved in establishing additional base stations.
Drone communication differs from standard ground wireless communication in two significant ways. First, drones typically have a strong LoS connection with ground nodes (i.e., users and smart devices). Thus, drones provide better channel conditions than ground fading channels. Furthermore, drones can even predict the Channel State Information (CSI) of different drones in 3D positions based on ground node location information and communication performance. Second, the drone features 3D manoeuvrability, which enables full control. The drone can modify its height and position to serve and improve drone communication performance with users/devices in smart environments [3,4,5]. In [6], the authors proposed an architecture to maximize wireless coverage in areas while also increasing the number of drones. The research published in [7] introduced the best 3D drone usage to increase the number of land users without compromising the Quality of Service (QoS). The authors proposed a wireless network for an extensive ground network for multiple drone base station placements [8]. In [9], the authors recommended using Long Term Evolution (LTE)-Unlicensed for deploying drones as a base station to create wireless connections following a natural catastrophe. Due to damage to the ground LTE infrastructure, coverage is limited in such situations [10].
Recently, Machine Learning (ML) has played a vital role in improving communication network performance in B5G systems. It supports communications services in smart environments and enhances the connectivity, signal quality, and QoS [11]. Artificial intelligence and ML play a vital role in improving the connectivity and QoS during the mobility of drones, robots, and things for supporting B5G communication systems [12,13]. ML-based techniques have been used extensively to optimize performance in drone communication [14]. The authors of [15] covered physical layer communication concerns for cellular-connected UAVs, a UAV deployment where UAVs act as users. However, the height at which the drone operates makes it susceptible to atmospheric disturbances.
In [16], the authors proposed an ML algorithm for trajectory planning with an underlying device-to-device communication. An ML-based algorithm was proposed for Unmanned Aerial Vehicle (UAV) trajectory planning and was proposed in Non-Orthogonal Multiple Access (NOMA) systems [17]. Under high LoS propagation circumstances and heavy interference, an ML-based drone-to-ground LTE cellular network was explored in [18]. In [19], the authors applied an artificial neural network to estimate drone signal strength over smart cities.
In this work, we apply the K-means algorithm, an unsupervised ML algorithm, in drone-user communication with atmospheric disturbances. The main contribution of this paper is to improve the performance of drone-users/device communication from signal quality analysis at the receiver. The work proposes the best possible error performance with given signal quality. Data rate and error rate values are observed for different environment types, such as suburban, urban, and rural locations and various rain rates. Further, we automate adapting to the best possible modulation scheme using the K-means algorithm, an unsupervised ML algorithm.
1.1. Related Work
Several attempts are made in applying ML in achieving AM. Various branches of ML such as supervised learning, unsupervised learning, and reinforcement learning (RL) have been applied to achieve AM [20]. In addition to the techniques mentioned above, Deep Learning techniques, which are used consistently along with various ML algorithms, are also used to achieve AM. Table 1 lists related works, and comparisons with existing works are mentioned afterward.
Supervised learning, a division of ML, assisted adaptive modulation is proposed in the multiple-input multiple-output (MIMO) system in [21]. In [22], the authors proposed a support vector machine-based algorithm, a supervised learning algorithm, assisted adaptation where the system learns to adapt to the best modulation without any external training. A link adaptation algorithm aiming to minimize computational time is proposed in [23]. The authors used the support vector machine (SVM) technique to achieve the same results. In a similar work [22], the authors used the SVM technique to achieve channel and modulation selection in cognitive radio. In [24], the authors used the K-Nearest Neighbour (K-NN) algorithm to achieve adaptive modulation in the underwater acoustic network. However, in addition to K-NN, they used an unsupervised algorithm as a tool to condense the data set.
Unsupervised algorithms were also considered, but not extensively, to achieve AM. The authors of [25] evaluated the k-means algorithm, an unsupervised algorithm, to achieve adaptive modulation in wired channels, where different cable modems with varying channel conditions are clustered. The k-means algorithm was used for user group clustering in [26]. Further, the authors consider the maximization of channel capacity by selecting appropriate clusters. Unlike supervised or unsupervised algorithms, RL schemes learn by interacting with the environment. In [27], the authors first proposed the possibility of applying RL in achieving AM at a given Signal-to-Noise Ratio (). In [28], the authors propose an RL-based algorithm for link adaptation in orthogonal frequency division multiplexing (OFDM). In a similar work, AM is considered in a 5G environment in [29]. Unlike in [28,29], the authors propose a Neural Network-based extension of an RL scheme called Deep RL to achieve AM in the heterogeneous cognitive network in [30].
1.2. Motivation and Contributions
The key idea of adaptive modulation is to achieve a particular Bit Error rate (BER) threshold by reducing the energy per bit per noise ratio. However, this adversely affects spectral efficiency, and hence, a choice of the modulation scheme for different channel conditions has to be made. The contributions of this paper are:
- We build a system model in which we consider switching between various phase shift schemes such as binary Phase-Shift Keying (BPSK), Quadrature Phase-Shift Keying (QPSK), 16-Quadrature Amplitude Modulation (QAM), and 256-QAM modulation schemes in order to satisfy the required BER threshold.
- We analyze the performance of the drone–user communication with various rain, LoS conditions.
- We propose an algorithm based on ML to intelligently adapt to the modulation scheme that offers the best data rate without sacrificing error performance due to atmospheric disturbances.
1.3. Paper Structure
The organization of the paper is given here. The description of the adaptive modulation is given in Section 2, and the system model and associated channel modeling are given in Section 3. In Section 4, a detailed description of the mathematical modeling of atmospheric imperfection and the ML-assisted adaptive modulation algorithm is given. Section 5 describes numerical results, and the conclusions are drawn in Section 6.
2. Adaptive Modulation Overview
The data rate at the receiving end hugely depends on the measure of , in the case of an atmospheric disturbance. Mathematically, in view of the LOS nature of the link, at larger , the capacity of the network with respect to can be shown as
where d is the Degrees of Freedom (DoF) communication system.
Despite the advantages provided by drones, the exact unique position of drones makes them susceptible to attenuation from environmental factors, and the major one among them is rain [31]. The attenuation occurs due to the scattering and dielectric loss. Apart from the height at which the drone operates, the frequency of operation also makes rain an essential parameter while designing a drone-based communication system [32,33,34,35,36]. This is because attenuation is dependent on the size of the scatterer. Since the mathematical analysis of the effect of rainfall is a tedious process, ITU has made an empirical model where the attenuation per km () is modeled using rainfall rate (R) and operating frequency (f), where R is mentioned in (mm/h) [37]. In essence, the sum rate and reliability of the drone communication experience considerable degradation due to rain [32,33].
Adaptive Modulation (AM) is an approach in the physical layer for optimizing the performance of a single wireless connection over flat fading channels. AM helps the communication system to achieve the optimal data rate and error rate by adapting the modulation order. One advantage of AM is that the system offers communication even when there is a disturbance in the channel. Another advantage is that the overhead required in the communication is reduced, which would have to take a significant part of the communication [20]. Similarly, the latency is also reduced, as a guaranteed communication is offered by the system [38].
3. System and Channel Modeling
3.1. System Model
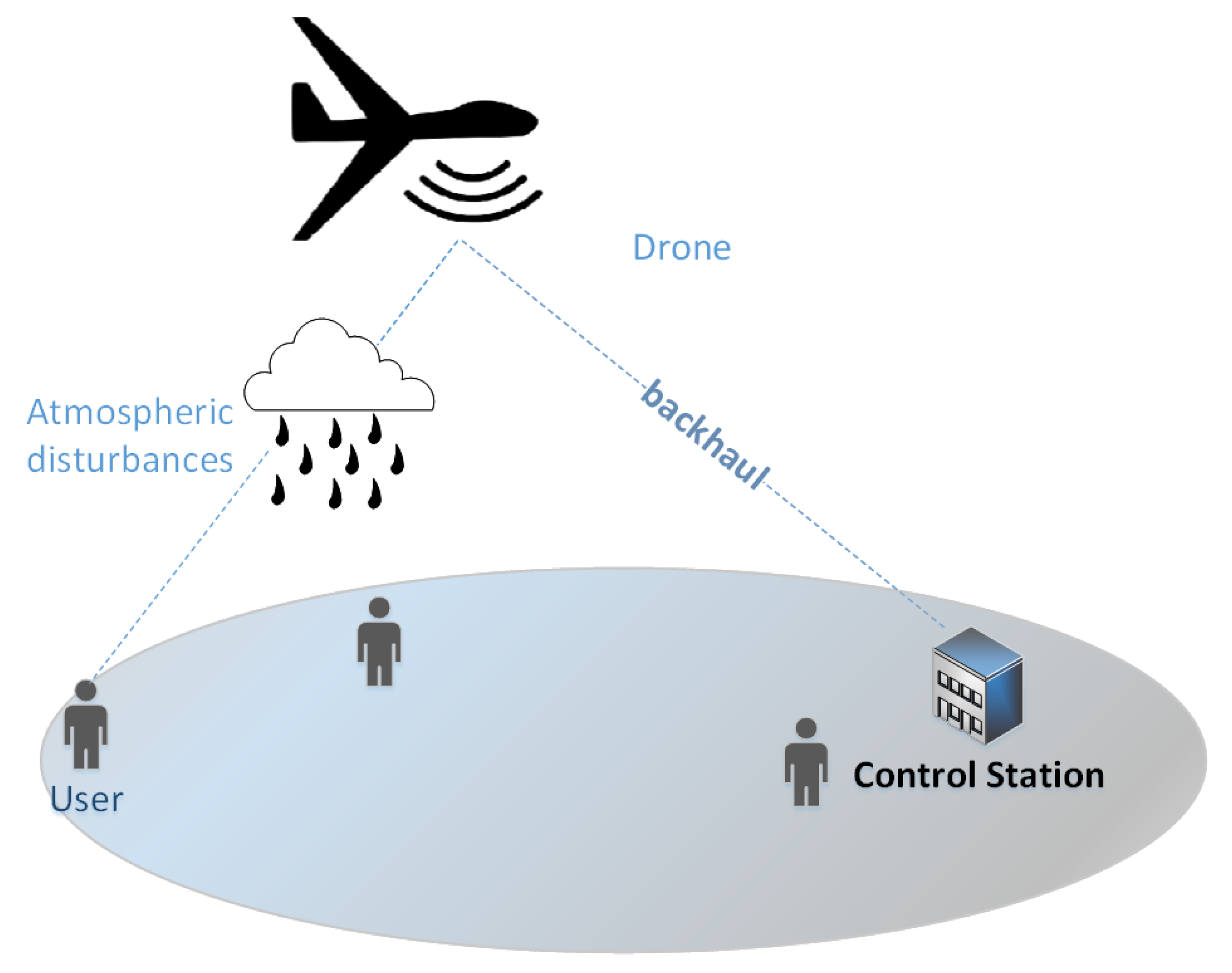
A drone–user communication system is considered in the paper. The system consists of a drone acting as the transmitter and a user at the receiving end, as shown in Figure 1. Considering the position of transmitter and receiver, the channel is modeled as Rician with Rician factor and is affected by rain, which is modeled by an empirical model provided by ITU [37]. Furthermore, we assume that each transmitter and receiver use the same frequency for operation, forming an interference-limited system.
3.2. Channel Modeling
Channel modeling is different in aerial channels, unlike the terrestrial counterpart. The percentage of LoS components is high in urban areas and less in rural areas in an A-to-G channel. That is, in urban scenarios, the A-to-G channel shows Rician fading as the LoS path is predominant [1]. However, in suburban scenarios, Rayleigh fading is observed due to stronger Non-LoS signals. As the Rayleigh channel can be considered as a particular case of Rician fading, we use Rician fading in this work [39,40]. Therefore, the channel model can be represented as
where and represent the channel matrix corresponding to LoS and NLoS paths. Hence, represents complex fading coefficients and the dimensions of the matrix are , where and represent the number of receiving and transmitting antennas. The Rician factor is [41]
where and are the LoS and NLoS power, respectively. We consider the transmitter and receiver having multiple antennas, and the MIMO channel is assumed to be static. The MIMO channel’s LoS part is given by [41]
where and represent the separation of antennas in the transmitter and receiver, respectively. and represent Angle-of-Arrival and Angle-of-Departure concerning the transmitter and receiver, respectively. The follows a Rayleigh distribution and has the same dimension as that of .
4. Ml-Assisted Adaptive Modulation
In this paper, we consider a drone–user communication with atmospheric disturbances, as shown in Figure 1. The channel is modeled as the Rician MIMO channel, a general analytical model for the Air-to-Ground channel. An ML algorithm called the k-means clustering algorithm is used to find the modulation scheme, providing optimal performance and data rate during atmospheric disturbances.
| Algorithm 1 K-means algorithm. |
|
4.1. K-Means Clustering
K-means clustering is a very powerful algorithm that falls under the category of unsupervised ML algorithms. The role of the algorithm is to cluster data points into K non-overlapping subsets called clusters.
The k-means algorithm operates N data points, where each data point is represented by . The goal is to find the association r, such that it minimizes the loss function,
where
which means that the value of is set to 1, if the data point is assigned to cluster k and 0 for other clusters. is an n-dimensional vector that carries the location of the centroid of the cluster. The steps followed in K-means clustering in shown in Algorithm 1.
4.2. Atmospheric Imperfections
It is evident that atmospheric imperfections play a vital role in Air-to-Ground communication [32,34,35,36]. Rain, gaseous absorption and scintillation are the main players that contribute to atmospheric imperfection. As we use high frequency for communication, the wavelength of the signal is comparable to the raindrop and hence contributes to large-scale fading [32]. We usually neglect this in terrestrial communication and use smaller frequencies (<5 GHz).
Attenuation is also dependent on the frequency of communication, rainfall rate, and distance over which rain is present. An empirical model has been suggested in [37], where the attenuation is modeled by frequency of communication (f) and rainfall rate (R). The mathematical model for calculating attenuation per Km is
where a and b are parameters obtained from the table given by ITU for particular operating frequency [37]. The path length () is to be multiplied to obtain the total rain attenuation to design reliable drone communication [33].
The path length () is found by
where effective rain height is 5 Km for the northern and southern hemisphere, is the ground station antenna height in meters and is the elevation angle in degrees. With the path length , rain attenuation and with an assumption that rain fall is in the vertical direction, the path loss due to rain is found as
It is evident that rain in the communication path inversely affects the performance in two ways [42],
- (1)
- The channel is attenuated heavily, and the received signal strength becomes weaker than the desired threshold,
- (2)
- An ill-modeled matrix destroys beam-forming vector design.Adaptive modulation has turned out to be an effective method to provide a higher rate by delivering a satisfactory performance. Hence, we propose adaptive modulation as a capacity maximization scheme under atmospheric imperfections.
Adaptive Modulation Using K-Means Algorithm
AM assures satisfactory performance by maintaining the BER threshold, while spectral efficiency is compromised due to the received SNR. In this way, we can switch the modulation schemes as the attenuation due to rain affecting the system. This paper considers BPSK, QPSK, 16-QAM, and 256-QAM as different modulation schemes for adaptive modulation. The proposed algorithm to adapt to the optimal modulation scheme based on varying rain rates is as follows.
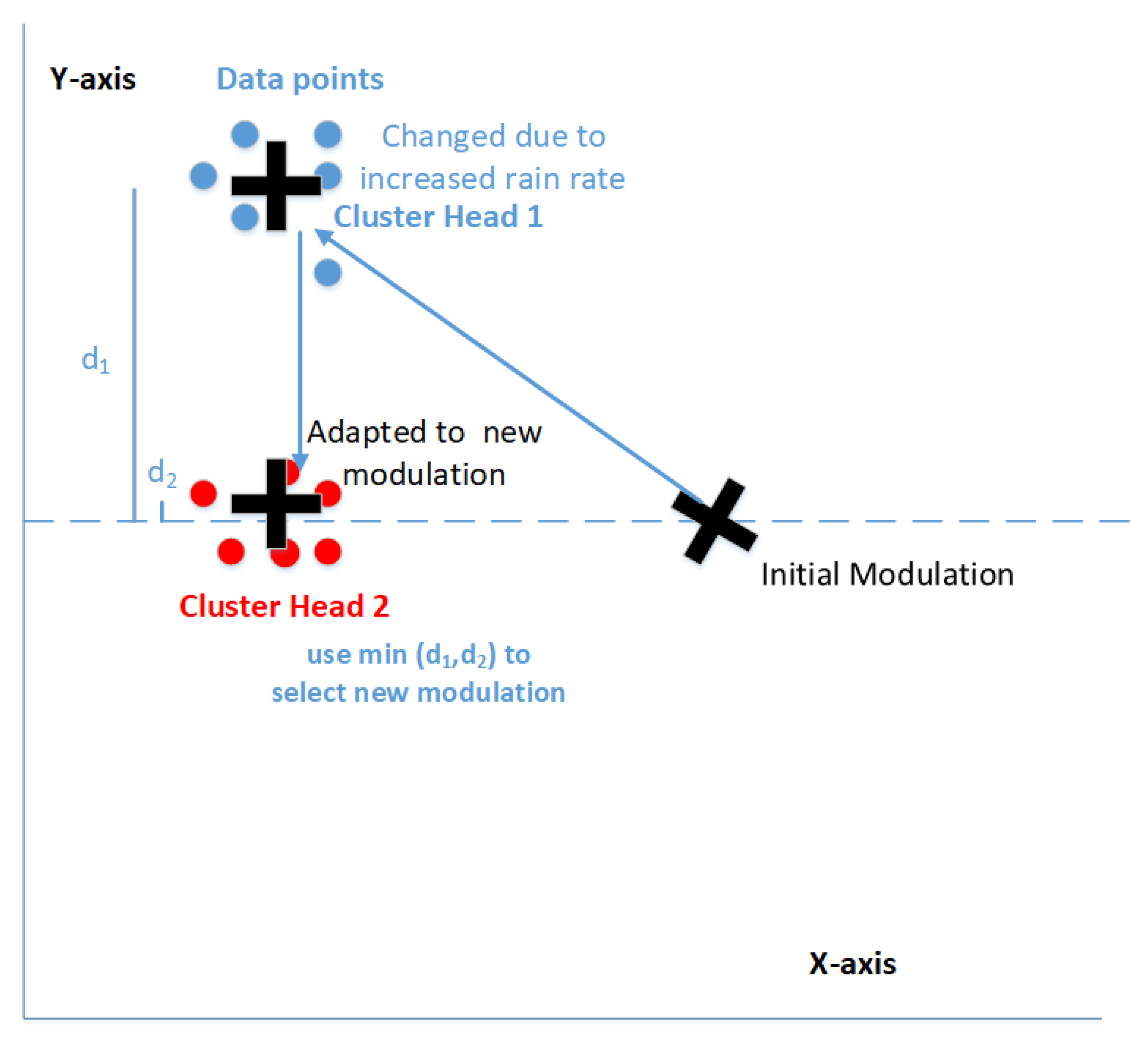
Algorithm 2 describes the proposed algorithm for adaptive modulation using k-means clustering. Several data points representing BER-SNR are generated by mapping the BER-SNR curve to a linear one, as shown in Figure 2. The BER-SNR curve is generated using a semilog plot, whereas the points given for the k-means algorithm are in a linear scale. Cluster heads are determined for data points with the same rain rate. Further, perpendicular distances , , where K is the number of modulations used concerning the BER threshold line, are observed. The selection of optimized modulation will be based on the distance between the cluster head and the BER threshold. The cluster head with minimum distance is selected to provide optimal performance. That is, we select modulation with a minimum .
| Algorithm 2 ML based AM |
|
5. Numerical Results
We carried out Monte Carlo simulations for a drone–user communication system over the Rician channel. First, we analyze performance with atmospheric disturbances, and in the later phase, the application of ML to optimize the performance is shown. The drones considered are located at the height of 18 km above the ground. Therefore, the performance analysis of atmospheric disturbances is performed in two phases.
In the first phase, the effect of the Rician factor () on drone communication over the clear sky is studied, while we analyze the impact of rain on the capacity and error performance in the second phase. Finally, we analyze the performance of the communication system with Adaptive Modulation. During the first phase, a QPSK modulation is performed over the symbols transmitted.
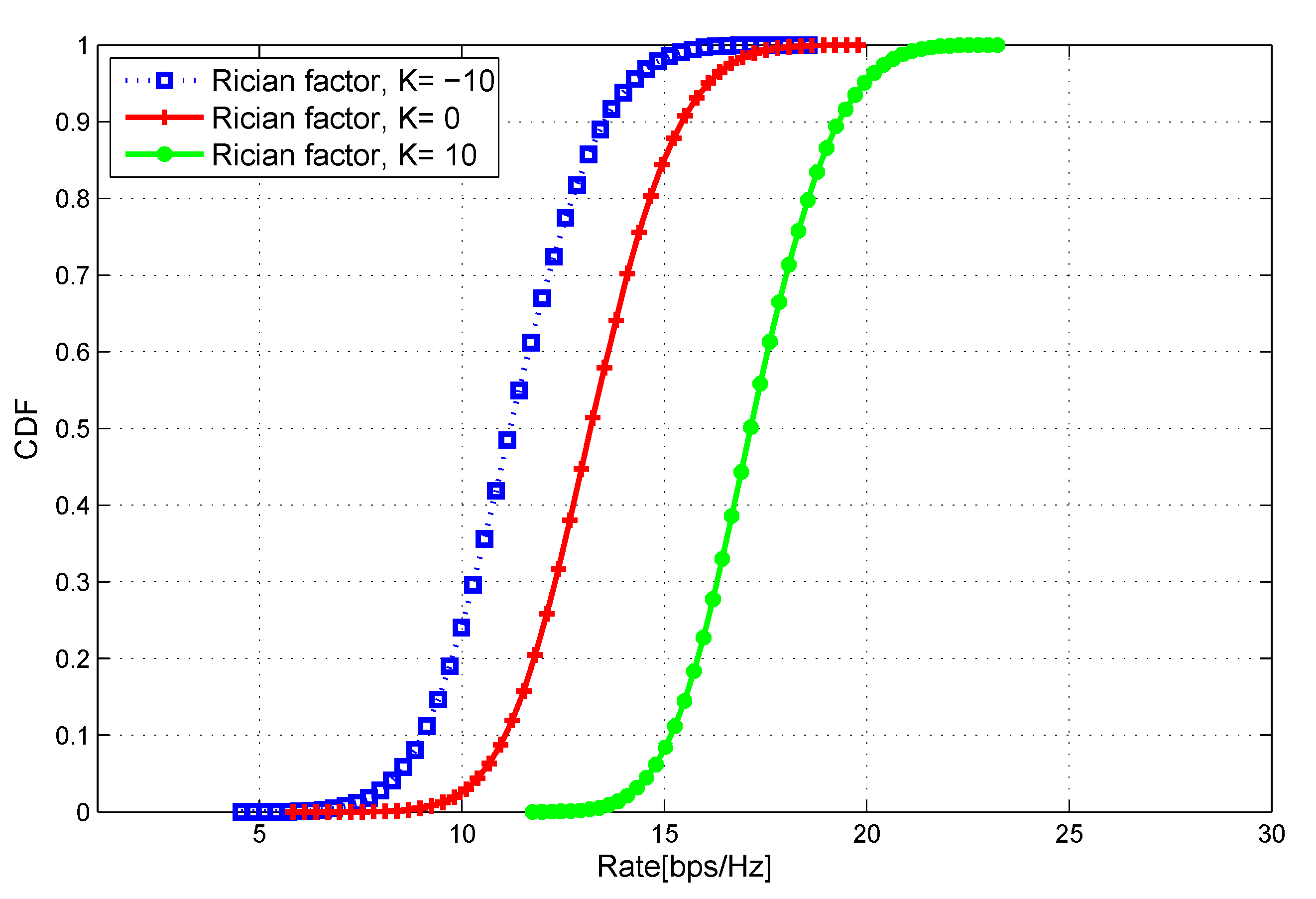
Figure 3 shows the capacity of the drone–user communication system over different Rician factors. We note that capacity above dB is better than the Rayleigh channel due to the limited presence of the LoS channel along with the NLoS channel. The presence of a stronger LoS component (i.e., dB) improves capacity, which is very useful in urban areas [1]. It is important to note that the advantage in data rate is possible if antennas are sufficiently separated to produce a full rank channel matrix.
Overall, from Figure 3, we can observe that the data rate with dB is better than dB, which is again better than dB. Hence, the data rate provided for drone–user communication differs for different values of the Rician factor, which again depends on the geographical locations [1].
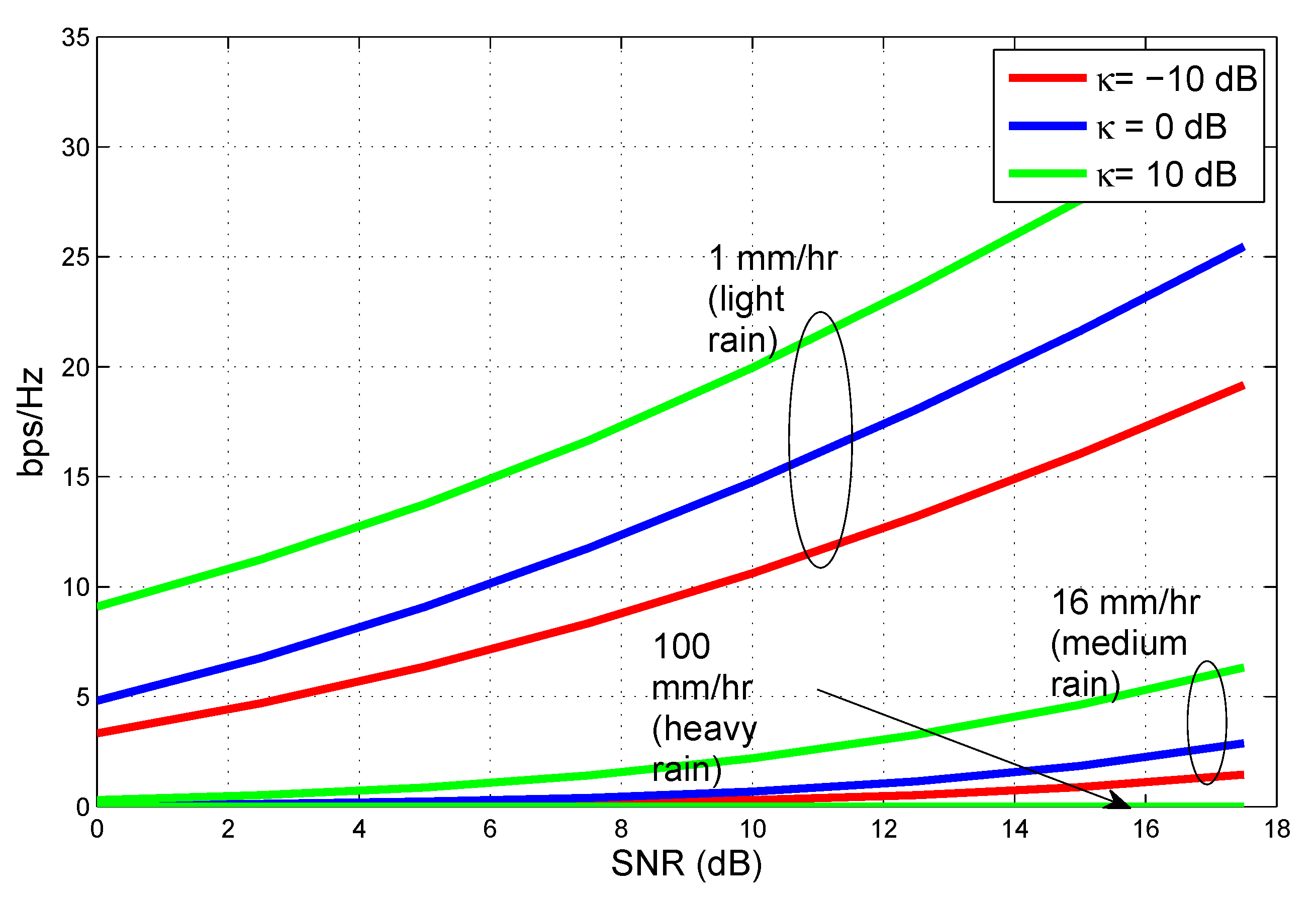
Next, we consider the effect of rain on the performance of the system considered. Figure 4 reports the data rate in for different scenarios, and the corresponding effect is observed. The rainfall rates of 1, 16, and 100 mm/h correspond to light, medium, and heavy tropical. It can be noted that the data rate is degraded heavily as the rainfall rate increases. While light rain can still support data transmission, transmission in heavy rain is nearly impossible. Results show that at dB, as rainfall rate varies from 1 to 16 mm/h, the system with dB experiences a data rate drop of 83.18% and on the other hand, the system with dB experiences a data rate drop of 94.47%. It is because the signal at the receiver is heavily degraded due to the rain.
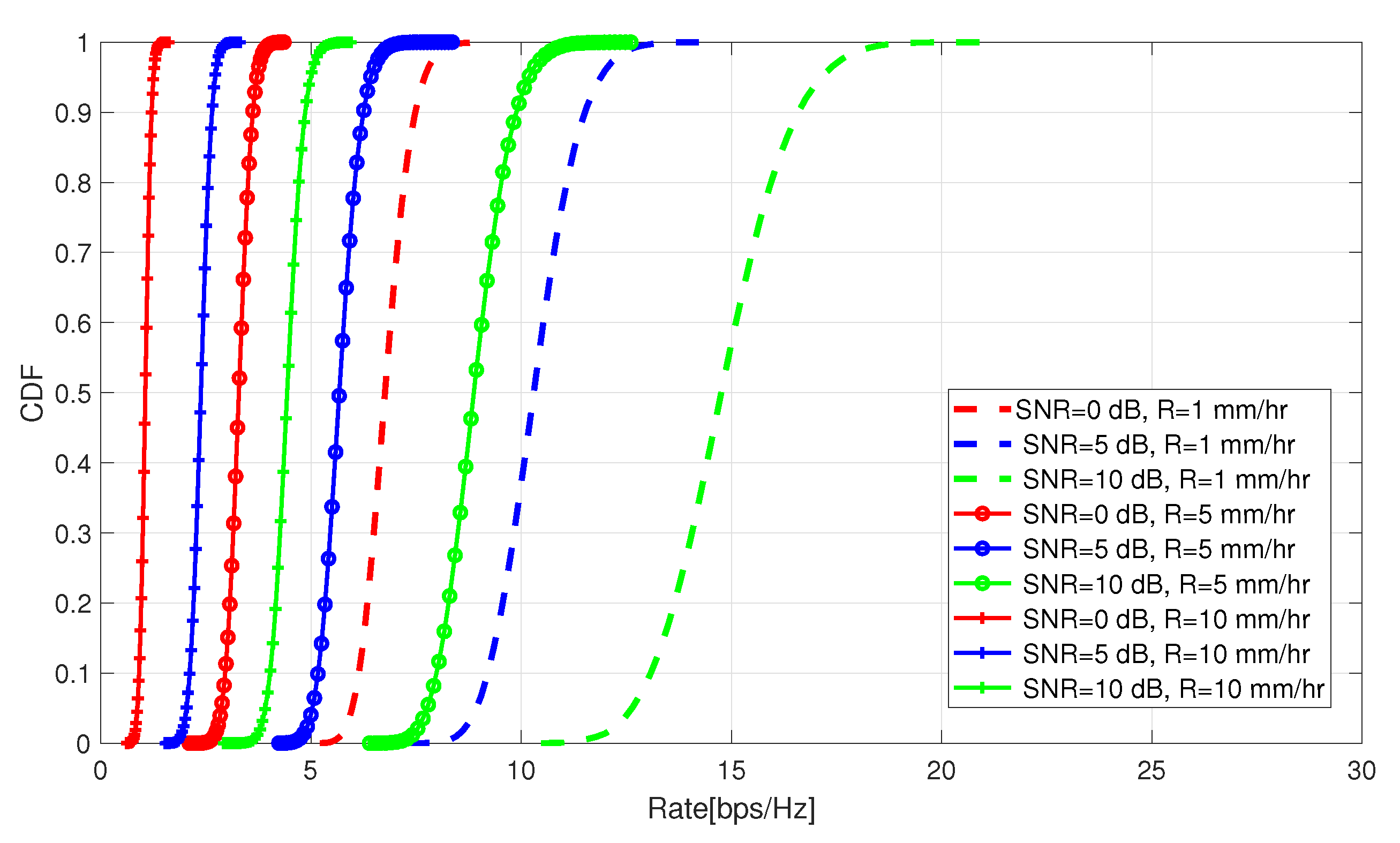
In Figure 5, we analyze the effect of on the data rate of the system. In other words, the signal power in the receiver has a considerable effect on the data rate. It can be observed that at higher , the data rate is high, and the data rate is dropping with decreasing . Furthermore, a higher rainfall rate restricts the sum rate, which is also observed in Figure 4. At a higher rainfall rate, the data rate is near to zero .
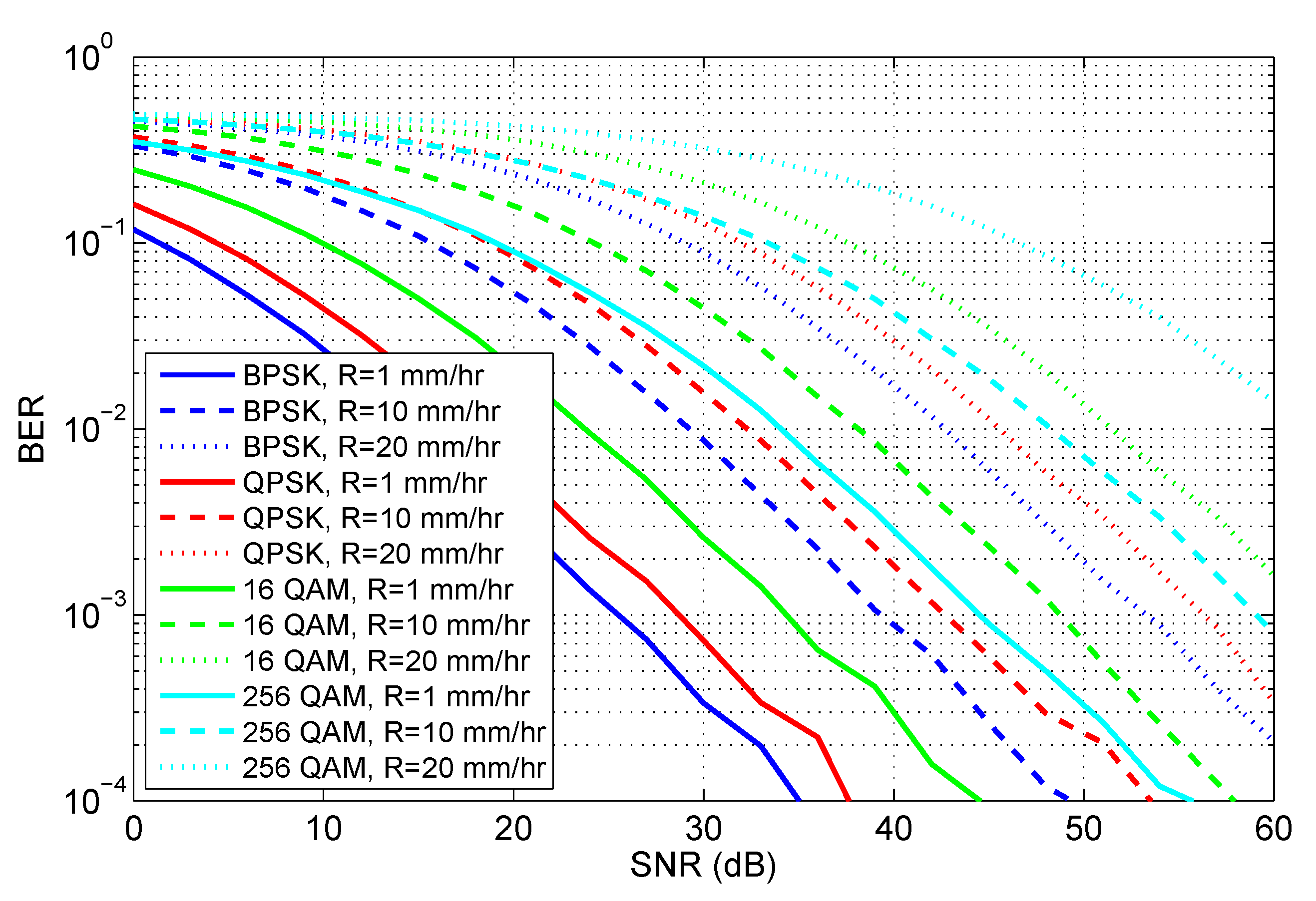
In Figure 6, BER vs. SNR characteristics are plotted for various modulation schemes. We can easily understand that it is possible to retain the BER performance at the data rate cost. During rain fall, it is possible to adapt to another modulation scheme that offers lesser spectral efficiency. However, the at which the switching is to be carried out vary with the rainfall rate. It can be observed that, to achieve a BER threshold of , the transition from QPSK to BPSK occurs at 18 dB for a rainfall rate of 1 mm/h. Meanwhile, a similar transition occurs at 33 dB for 10 mm/h. Intelligent switching between modulation schemes depending on rain is the key to retaining the required BER. An ML-assisted switching is analyzed in the next phase.
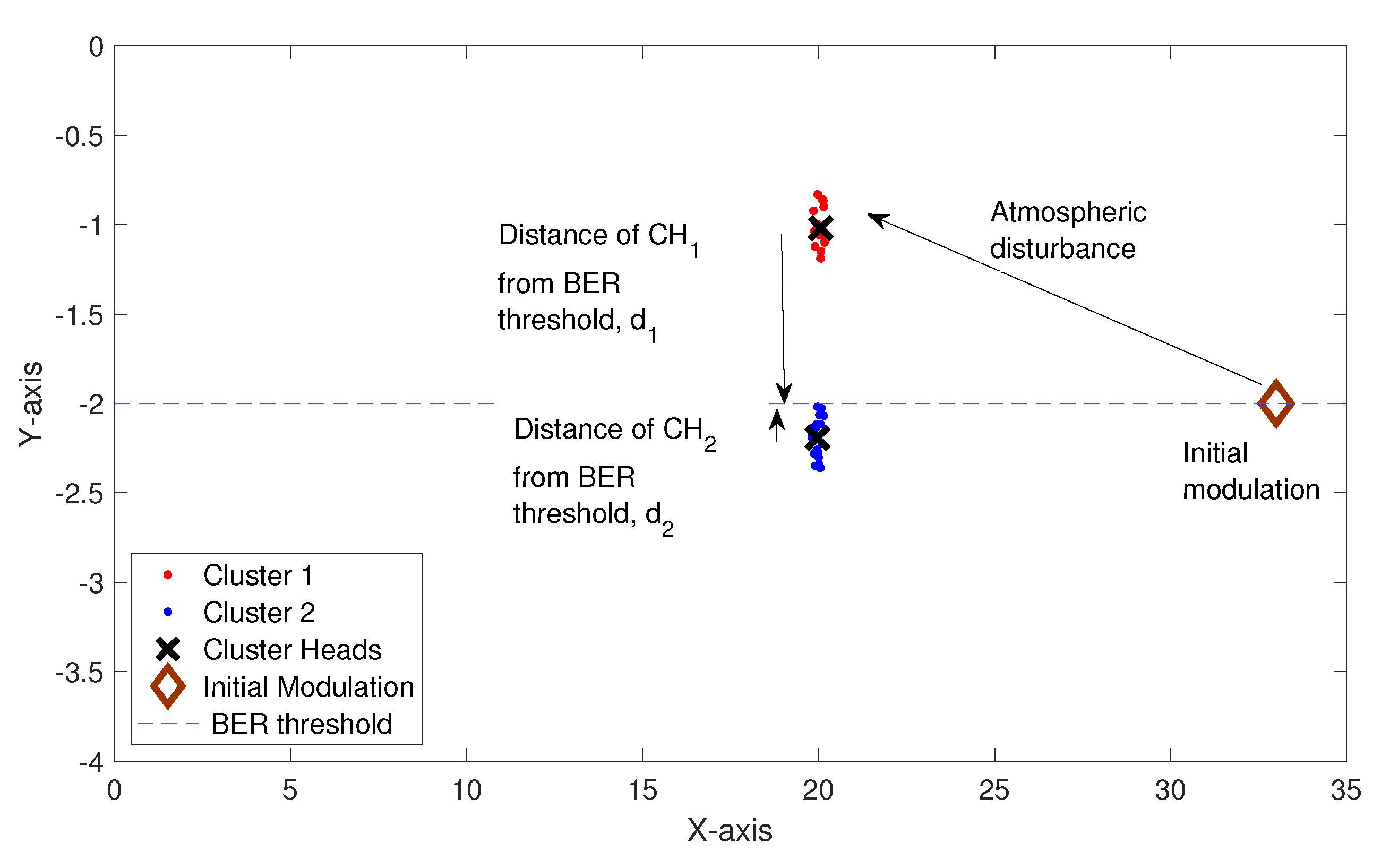
Finally, in Figure 7, we apply a k-means algorithm with K = 2 in a drone–user communication system with atmospheric disturbances. Two modulations schemes are considered for simplicity. Several data points in the figure are observed using Monte Carlo simulations on a drone–user communication system with atmospheric disturbances, having distinct BER and SNR values corresponding to a modulation scheme and rain rate. The semilog graph is then mapped to a linear scale to perform an ML algorithm. Cluster heads are determined, and the perpendicular distance from the BER threshold line and are observed. The cluster head with minimum distance is selected. In this example, several BPSK and 16 QAM points are observed with a 10 mm/h rain rate. We consider the modulation at 1 mm/h as 16-QAM, which offers BER. With the rain rate shifting from 1 to 10 mm/h, performance deteriorates. It is observed that BPSK offers the best performance for a rain rate of 10 mm/h, as 16-QAM results in higher BER. With k-means, new cluster heads are formed, and the system adapts to the new modulation scheme.
6. Conclusions
This paper proposed an ML-based algorithm to perform adaptive modulation in drone–user communication systems to overcome ill effects due to atmospheric disturbances. The adaptive modulation scheme proposed in the paper achieves reliable communication at the cost of spectral efficiency. Monte Carlo simulations were carried out to analyze the system performance. As a result, a reliable system that achieves the maximum possible data rate without compromising error performance is developed using the k-means clustering algorithm. The algorithm requires the position of users to perform the k-means algorithm. As future work, we consider a case where the atmospheric disturbances vary for locations. A swarm of drones deployed for communication will have to use AM schemes decentralized to achieve an overall best performance.
Author Contributions
Conceptualization, S.P.G. and M.M.; methodology, S.P.G.; software, S.P.G.; validation, S.P.G.; writing—original draft preparation, S.P.G. and S.H.A.; writing—review and editing, S.P.G., S.H.A. and M.M.; visualization, S.P.G.; supervision, M.M.; project administration, A.V.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
We acknowledge the support by research grant from Science596Foundation Ireland (SFI) under Grant Number SFI/16/RC/3918 (Confirm), and Marie Skłodowska-Curie597grant agreement No. 847577 co-funded by the European Regional Development Fund.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zajić, A. Mobile-to-Mobile Wireless Channels; Artech House: London, UK, 2013. [Google Scholar]
- Sudheesh, P.G.; Magarini, M.; Muthuchidambaranathan, P. Achieving maximum system capacity in multiple-high altitude platforms through interference alignment. In Proceedings of the 2016 11th International Conference on Industrial and Information Systems (ICIIS), Roorkee, India, 3–4 December 2016; pp. 139–143. [Google Scholar]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Predictive estimation of the optimal signal strength from unmanned aerial vehicle over internet of things using ANN. arXiv 2018, arXiv:1805.07614. [Google Scholar]
- Alsamhi, S.H.; Rajput, N.S. Implementation of call admission control technique in HAP for enhanced QoS in wireless network deployment. Telecommun. Syst. 2016, 63, 141–151. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Rajput, N.S. An efficient channel reservation technique for improved QoS for mobile communication deployment using high altitude platform. Wirel. Pers. Commun. 2016, 91, 1095–1108. [Google Scholar] [CrossRef]
- Akram, T.; Awais, M.; Naqvi, R.; Ahmed, A.; Naeem, M. Multicriteria UAV base stations placement for disaster management. IEEE Syst. J. 2020, 14, 3475–3482. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Zhang, H.; He, Y. Temporal Correlation and Long-Term Average Performance Analysis of Multiple UAV-Aided Networks. IEEE Internet Things J. 2021, 8, 8854–8864. [Google Scholar] [CrossRef]
- Athukoralage, D.; Guvenc, I.; Saad, W.; Bennis, M. Regret based learning for UAV assisted LTE-U/WiFi public safety networks. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar]
- Sudheesh, P.; Magarini, M.; Muthuchidambaranathan, P. Multiple-high altitude platforms aided system architecture for achieving maximum last mile capacity in satellite communication. Telecommun. Syst. 2019, 70, 27–35. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Al-Dois, H.; Ben Othman, S.; Hassan, J.; Hawbani, A.; Sahal, R.; Lee, B.; Saleh, H. Machine Learning for Smart Environments in B5G Networks: Connectivity and QoS. Comput. Intell. Neurosci. 2021. [Google Scholar] [CrossRef] [PubMed]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Survey on artificial intelligence based techniques for emerging robotic communication. Telecommun. Syst. 2019, 72, 483–503. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M. Convergence of machine learning and robotics communication in collaborative assembly: Mobility, connectivity and future perspectives. J. Intell. Robot. Syst. 2020, 98, 541–566. [Google Scholar] [CrossRef]
- Hussain, F.; Hassan, S.A.; Hussain, R.; Hossain, E. Machine learning for resource management in cellular and IoT networks: Potentials, current solutions, and open challenges. IEEE Commun. Surv. Tutor. 2020, 22, 1251–1275. [Google Scholar] [CrossRef] [Green Version]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Machine learning for wireless connectivity and security of cellular-connected UAVs. IEEE Wirel. Commun. 2019, 26, 28–35. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Shi, S.; Feng, T.; Gu, X. Trajectory planning in UAV emergency networks with potential underlaying D2D communication based on K-means. EURASIP J. Wirel. Commun. Netw. 2021, 1, 1–19. [Google Scholar]
- Wu, X.; Wei, Z.; Cheng, Z.; Zhang, X. Joint optimization of UAV Trajectory and User Scheduling Based on NOMA Technology. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Amorim, R.; Wigard, J.; Nguyen, H.; Kovacs, I.Z.; Mogensen, P. Machine-learning identification of airborne UAV-UEs based on LTE radio measurements. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Alsamhi, S.H.; Almalki, F.; Ma, O.; Ansari, M.S.; Lee, B. Predictive Estimation of Optimal Signal Strength from Drones over IoT Frameworks in Smart Cities. IEEE Trans. Mob. Comput. 2021. [Google Scholar] [CrossRef]
- Luo, F.L. (Ed.) Machine Learning for Future Wireless Communications; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Daniels, R.C.; Caramanis, C.M.; Heath, R.W. Adaptation in convolutionally coded MIMO-OFDM wireless systems through supervised learning and SNR ordering. IEEE Trans. Veh. Technol. 2009, 59, 114–126. [Google Scholar] [CrossRef]
- Xu, G.; Lu, Y. Channel and modulation selection based on support vector machines for cognitive radio. In Proceedings of the 2006 International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 22–24 September 2006; pp. 1–4. [Google Scholar]
- Daniels, R.; Heath, R.W. Online adaptive modulation and coding with support vector machines. In Proceedings of the 2010 European Wireless Conference (EW), Lucca, Italy, 12–15 April 2010; pp. 718–724. [Google Scholar]
- Ko, Y.; Choi, J. Unsupervised Machine Intelligence for Automation of Multi-Dimensional Modulation. IEEE Commun. Lett. 2019, 23, 1783–1786. [Google Scholar] [CrossRef]
- Schnitzer, J.; Prahladan, P.; Rahimzadeh, P.; Humble, C.; Lee, J.; Lee, J.; Lee, K.; Ha, S. Toward Programmable DOCSIS 4.0 Networks: Adaptive Modulation in OFDM Channels. IEEE Trans. Netw. Serv. Manag. 2020, 18, 441–455. [Google Scholar] [CrossRef]
- Mauricio, W.V.; Araujo, D.C.; Neto, F.H.; Lima, F.R.; Maciel, T.F. A low complexity solution for resource allocation and SDMA grouping in massive MIMO systems. In Proceedings of the 2018 15th International Symposium on Wireless Communication Systems (ISWCS), Lisbon, Portugal, 28–31 August 2018; pp. 1–6. [Google Scholar]
- Leite, J.P.; de Carvalho, P.H.P.; Vieira, R.D. A flexible framework based on reinforcement learning for adaptive modulation and coding in OFDM wireless systems. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 809–814. [Google Scholar]
- de Carvalho, P.H.P.; Vieira, R.D.; Leite, J.P. A Continuous-State Reinforcement Learning Strategy for Link Adaptation in OFDM Wireless Systems. J. Commun. Inf. Syst. 2015, 30. [Google Scholar] [CrossRef]
- Mota, M.P.; Araujo, D.C.; Costa Neto, F.H.; de Almeida, A.L.F.; Cavalcanti, F.R. Adaptive Modulation and Coding Based on Reinforcement Learning for 5G Networks. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Tan, J.; Liang, Y.C.; Feng, G.; Niyato, D. Deep reinforcement learning-based modulation and coding scheme selection in cognitive heterogeneous networks. IEEE Trans. Wirel. Commun. 2019, 18, 3281–3294. [Google Scholar] [CrossRef] [Green Version]
- Sudheesh, P.; Mozaffari, M.; Magarini, M.; Saad, W.; Muthuchidambaranathan, P. Sum-rate analysis for high altitude platform (HAP) drones with tethered balloon relay. IEEE Commun. Lett. 2017, 22, 1240–1243. [Google Scholar] [CrossRef] [Green Version]
- Ishimaru, A.; Jaruwatanadilok, S.; Ritcey, J.A.; Kuga, Y. A MIMO propagation channel model in a random medium. IEEE Trans. Antennas Propag. 2009, 58, 178–186. [Google Scholar] [CrossRef]
- Spillard, C.; Gremont, B.; Grace, D.; Tozer, T. The performance of high-altitude platform networks in rainy conditions. In Proceedings of the 22nd AIAA International Communications Satellite Systems Conference & Exhibit 2004 (ICSSC), Monterey, CA, USA, 9–12 May 2004; p. 3220. [Google Scholar]
- Rundstedt, K. Measurements and Channel Modelling of Microwave Line-of-Sight MIMO Links. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2015. [Google Scholar]
- Kandus, G.; Mohorcic, M.; Smolnikar, M.; Leitgeb, E.; Javornik, T. A channel model of atmospheric impairment for the design of adaptive coding and modulation in stratospheric communication. WSEAS Trans. Commun. 2008, 7, 311–326. [Google Scholar]
- Bohagen, F.; Orten, P.; Oien, G. Modeling and analysis of a 40 GHz MIMO system for fixed wireless access. In Proceedings of the 2005 IEEE 61st Vehicular Technology Conference, Stockholm, Sweden, 30 May–1 June 2005; Volume 3, pp. 1691–1695. [Google Scholar]
- Zhao, Z.w.; Zhang, M.g.; Wu, Z.s. Analytic specific attenuation model for rain for use in prediction methods. Int. J. Infrared Millim. Waves 2001, 22, 113–120. [Google Scholar] [CrossRef]
- Jiang, X.; Shokri-Ghadikolaei, H.; Fodor, G.; Modiano, E.; Pang, Z.; Zorzi, M.; Fischione, C. Low-latency networking: Where latency lurks and how to tame it. Proc. IEEE 2018, 107, 280–306. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Kanatas, A.G. Three-dimensional HAP-MIMO channels: Modeling and analysis of space-time correlation. IEEE Trans. Veh. Technol. 2010, 59, 2232–2242. [Google Scholar] [CrossRef]
- Dong, F.; He, Y.; Nan, H.; Zhang, Z.; Wang, J. System capacity analysis on constellation of interconnected HAP networks. In Proceedings of the 2015 IEEE fifth international conference on big data and cloud computing, Dalian, China, 26–28 August 2015; pp. 154–159. [Google Scholar]
- Cho, Y.S.; Kim, J.; Yang, W.Y.; Kang, C.G. MIMO-OFDM Wireless Communications with MATLAB; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Sudheesh, P.; Sharma, N.; Magarini, M.; Muthuchidambaranathan, P. Effect of imperfect CSI on interference alignment in multiple-High Altitude Platforms based communication. Phys. Commun. 2018, 29, 336–342. [Google Scholar]
Figure 1.
Drone–user connectivity under atmospheric disturbances.

Figure 2.
Adaptive modulation using the k-means algorithm.

Figure 3.
CDF with different Rician factor.

Figure 4.
Data rate under different rain rates.

Figure 5.
CDF vs. bps/Hz for drone–user communication.

Figure 6.
BER performance for adaptive modulation.

Figure 7.
ML-assisted adaptive modulation.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison with the existing works.
| Ref | Highlighted | Advantages | Limitation and Future Directions |
|---|---|---|---|
| [21] | Link adaptation in OFDM using K-NN algorithm | -Supervised learning algorithm, which works well, if training data are available. -Applied in the MIMO system | Training data are required in supervised learning |
| [22] | Channel and modulation selection using SVM algorithm in cognitive radio | -Supervised learning algorithm, training improves performance -Applied in cognitive radio | Applied in cognitive radio, not generalized. |
| [23] | Fast link adaption using ML algorithm | -Uses SVM method for fast adaption | Data set is required for training |
| [24] | Adaptive modulation in under water acoustic network | -Improved performance verified with practical experiments -Uses K-NN and k-means algorithm | k-means is used for training set condensation |
| [25] | Adaptive modulation in wired communication where different cable modems with similar channel conditions are clustered | -Classification using k-means -Improves performance in wired OFDM transmission | Applied in wired channel and extension to wireless is not considered |
| [26] | Application of K-means clustering in multi-user Massive MIMO scenario | -K-Means clustering is used for clustering user groups and clusters that maximize capacity are selected | Applicable in Massive MIMO scenario |
| [27] | Novel framework for AM in OFDM | -Used Q-Learning, an RL algorithm -Decision is based on information in the Q-Table | Performance is poor in initial stages. |
| [28] | Link adaptation in OFDM | -Same as above -Extensive study about RL in AM is carried out | RL requires huge time to converge |
| [29] | Q-learning-based adaptive modulation for 5G network | -Computationally less complex -Need not possess big storage as RL does not require previous data | RL takes huge time for convergence. |
| [30] | Deep reinforcement learning-based adaptive modulation in cognitive heterogeneous neztworks | -Can process complex data -By improving the neural network we can improve the performance and/or capacity of the data processing | Computationally complex and drones have limited computational power. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Gopi, S.P.; Magarini, M.; Alsamhi, S.H.; Shvetsov, A.V. Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G. Drones 2021, 5, 128. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5040128
AMA Style
Gopi SP, Magarini M, Alsamhi SH, Shvetsov AV. Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G. Drones. 2021; 5(4):128. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5040128
Chicago/Turabian StyleGopi, Sudheesh Puthenveettil, Maurizio Magarini, Saeed Hamood Alsamhi, and Alexey V. Shvetsov. 2021. "Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G" Drones 5, no. 4: 128. https://0-doi-org.brum.beds.ac.uk/10.3390/drones5040128