
Survey on Unmanned Aerial Vehicle for Mars Exploration: Deployment Use Case
by
 , and
, and
Manjula Sharma
1, 
Akshita Gupta
1, 
Sachin Kumar Gupta
1,
Saeed Hamood Alsamhi
2,3,* and
and
Alexey V. Shvetsov
4,5 1
Department of Electronics and Communication Engineering, Shri Mata Vaishno Devi University Katra, Katra 182320, Jammu and Kashmir, India
2
SRI, Technological University of the Shannon, Midlands Midwest, N37 HD68 Athlone, Ireland
3
Faculty of Engineering, IBB University, Ibb 70270, Yemen
4
Department of Operation of Road Transport and Car Service, North-Eastern Federal University, 677000 Yakutsk, Russia
5
Department of Transport and Technological Processes, Vladivostok State University of Economics and Service, 690014 Vladivostok, Russia
*
Author to whom correspondence should be addressed.
Drones 2022, 6(1), 4; https://0-doi-org.brum.beds.ac.uk/10.3390/drones6010004
Submission received: 30 September 2021
/
Revised: 10 December 2021
/
Accepted: 12 December 2021
/
Published: 22 December 2021
(This article belongs to the Special Issue Space Drones for Planetary Exploration)
Abstract
:In recent years, the area of Unmanned Aerial Vehicles (UAVs) has seen rapid growth. There has been a trend to build and produce UAVs that can carry out planetary exploration throughout the past decade. The technology of UAVs has tremendous potential to support various successful space mission solutions. In general, different techniques for observing space objects are available, such as telescopes, probes, and flying spacecraft, orbiters, landers, and rovers. However, a detailed analysis has been carried out due to the benefits of UAVs relative to other planetary exploration techniques. The deployment of UAVs to other solar bodies has been considered by numerous space agencies worldwide, including NASA. This article contributes to investigating the types of UAVs that have been considered for various planetary explorations. This study further investigates the behaviour of UAV prototypes on Mars’ surface in particular. It has been discovered that a prototype UAV flight on Mars has a higher chance of success. In this research, a prototype UAV has been successfully simulated to fly on Mars’ surface. This article discusses the opportunities, challenges, and future scope of deploying UAVs on Mars.
1. Introduction
Space exploration is the largest and most influential example of many kinds of convergence. It brings many technological areas together: propulsion, life sciences, materials, guidance, and in order to maintain the endeavour, space exploration is an example of several kinds of integration, power, communication, and a host of others [1]. Space was studied by ancient astronomy as early as the 4th century BCE [2]. In comparison to the Earth, there is evidence that several astronomical bodies in the solar system have atmospheres, aerosol and cloud science, atmospheric chemistry, and dynamics [3]. Such parameters can be studied and explored with the help of space exploration.
Compared to other cosmological systems, our solar system, including the Sun and all that orbits it (planets, stars, moons, comets, and meteoroids), has gained further interest from numerous space agencies [4]. The 20th-century superpowers claimed that space exploration and discovery are a beneficial investment, as space exploration has led to many different areas, such as solar panels, cancer therapy, water purification systems, better computing systems, rescue systems, and global search systems [5].
Motivation and Contribution
Progress in recent technologies has enabled UAVs to be considered valuable platforms for planetary exploration [6]. UAVs have had extremely high progress to be applied for space missions [7]. However, the applied methods for planetary exploration have limited mobility and low resolution and provide limited information about the planet. We have been motivated to use UAVs for space exploration to resolve these issues. In other words, we can say that UAVs can overcome the planetary measurement gap. Exploiting space through UAVs will have many benefits. UAVs can provide real-time services at the edge of the network [8]. UAVs can map a large area of the planetary body and gather data from smart environments [9]. Moreover, they have better resolution compared to the satellites and orbiters used till now. Since UAVs are remote-controlled spacecraft, they can have sufficient station time [10]. The contribution of this paper focuses on the complete comprehensive survey and previous failures in space exploration. Furthermore, we provide a cost-effective solution [11] by deploying UAVs in space. The main aim of our research work is to simulate a UAV model for successful deployment on Mars. The UAV model proposed in our study is utilised to distinguish between flight conditions on Mars’ surface and those on Earth. It supports acrobatic maneuvers, including forwarding looping, backward looping, left barrel rolls, and right barrel rolls, giving enhanced coverage and better resolution.
The remaining sections of the paper are as follows: Section 2 regards the related work and the types of UAVs for space investigation. Section 3 discusses the preliminary studies, failed missions, and the types of UAVs used previously for planetary exploration (particularly Mars, Venus, and Titan). Section 4 presents the simulation results and discussion, including the system model for deploying a UAV prototype on Mars’ surface, parameters considered for the successful Mars flight, and the simulated results achieved. Section 5 investigates the opportunities, future scope, and challenges for deploying UAVs on Mars. Finally, the paper is concluded in Section 6. Further, the list of the abbreviations has also been tabulated in Abbreviations section that is used throughout this article.
2. Space Exploration through Different Methods/Vehicles
This section discusses the various UAVs designed till now for space exploration. The section discusses the UAVs used for Mars exploration, Venus Exploration, and Titan exploration.
2.1. Space Exploration through UAVs
For private use (e.g., UAV filming of holidays), commercial use (e.g., UAV delivery systems) [12], and space mission applications, the use of UAVs has grown significantly (e.g., The Mars Helicopter for 2021). This is due to the benefits of low-speed forward flight, VTOL, and hovering [13]. In addition, the use of UAVs to study other planets or moons has been one of the critical goals of space agencies over the past decade. The use of UAVs for planetary exploration may have many advantages, particularly that a UAV can map a wider area than a rover at a resolution far more significant than that provided by current satellites or orbiters [14]. The overall details of the Venus, Mars, Titan, and Earths’ moon’s atmospheric conditions, characteristics, and configurations of the UAV flights are described below.
2.1.1. Mars UAVs
Mars, relative to Earth, has a low density; the concept of UAVs that can fly on this planet has gained a lot of interest due to the importance of Mars science [15]. In article [16], the author has explored the options of the flight system for the construction of a long-term endurance Mars mission by aeroplane. The mission model was designed in the model centre in the design context. The maximum endurance of each configuration is determined by the method of hybrid ad user-driven fixed-point iteration. The propulsion systems surveyed in this paper are: a bi-propellant rocket, battery-powered, direct-methanol fuel cell-powered, beam solar, and microwave-powered. The direct methanol fuel was proved the best onboard power system, and the solar beam has the potential for indefinite flight. As a result of this combination, the aeroplane could cruise for 17.8 h on Mars’ surface. The limitation is that the resulting project is too large to be deployed.
In article [17], the main objective of the research was to design the requirements of the long-endurance aircraft using solar PV or radioisotope power system so that it can sustain the Mars climate. The idea of the design point is taken from the methodology of designing the HAPP. The results show that the capability of long-endurance aircraft is convincible in Mars exploration. Since this is a viability study; thus, the design solution’s problems have not been mentioned. However, the essential attributes that have been the basis of the research can be used to determine what advances in aircraft and technology will be required for future projects. However, the author has not specified the type of radiator system used for both types of aircraft, without which the reader cannot obtain the accurate figure of merit of the system. NASA’s Mini-Sniffer aircraft was the first Mars UAV configuration that fulfilled the specifications [18]. In article [18], a tiny, unmanned survey aircraft has been developed by NASA to measure turbulence and atmospheric emissions from ground level to 90,000 ft altitude. The Mini-Sniffer cruises typically for one hour at 70,000 feet with a 25-lb air sampling apparatus before being remotely piloted back to Earth. In article [19], a mission and prototype of a Mars UAV were described. The name given to the model is Astro plane. The aircraft was designed to provide outstanding knowledge of Mars’ atmosphere in the intermediate resolution range to surface vehicles and orbiters as a research study. The air vehicle was expected to conduct aerial surveys, land instrument sets, collect samples, and perform atmospheric sounding in the specified mission. In study [20], a Mars aeroplane’s mission concept was developed from the early concept of synchronous entry of 12 to 14 aeroplanes from two-plane spacecraft to three-plane spacecraft. Each aeroplane carries four aeroplane capsules and one comsat.
Several studies by NASA, universities, and industry were carried out from the 1980s to the 1990s to identify new Mars atmosphere missions and design various types of Mars UAVs [21]. Article [21] patterned the construction of Mars aircraft, designated as the Argo VII. The Argo VII’s aerodynamic, stability, and control parameters were calculated using analytical and control parameters similar to that of ARES-2. Progress in technical areas, such as propulsion technology, composites, and energy storage systems, has led to more complex Mars UAVs. In article [22], as an affordable means of launching small planetary exploration payloads, the NASA Jet Propulsion Laboratory developed the Micro-Mission concept in 1999. The ASAP of the Ariane 5 launch vehicle was used to launch a spacecraft weighing 200 kg into a geosynchronous transfer orbit. Numerous universities have performed a study on Mars aerial vehicles since 2000, such as the University of Colorado at Boulder and Wichita State University. The MAP project was the subject of researchers from the University of Colorado at Boulder [23]. In article [23], as the design project priority, the MARV team chose to deploy the wings of the MAP. The project for MARV was split into four stages: initial design, deployment system, machining and fabrication of components, and step of integration and checking. The final aim of the project was to plan for the MAP with the wing packaging and wing launch. The outcome was a fully deployable wing with the associated actuator, microprocessor, and supporting applications. The secondary purpose of the deployable wing was to perform wind tunnel testing of the durability of its pitch. For the MAP, a full software architecture design was also built along with all the related electrical components required to incorporate the aerospace. In [24], the research explains the design and development of different autopilot device architectures for unmanned aerial mini/micro rotary-wing vehicles via the model-based design approach. Various flight control methods are discussed with theoretical history under the different chapters and evaluated through simulations and experimental campaigns. Table 1 shows the comparison between the parameters of various Mars UAVs discussed above.
2.1.2. Venus UAVs
Venus certainly has an Earth-like air pressure, which implies that the flight power needed is smaller than other planets. Thus, the analysis has also been performed on UAVs that can fly in the atmosphere of Venus. The incredibly slow rate of rotation of Venus results in a very long solar day. This means that the ground speed needed to stay at the sub-solar point for an aircraft is incredibly slow, at the equator just 13.4 km/h [35]. In article [36], a solar-powered aircraft system has been proposed for Venus exploration. Large aircraft are more powerful than tiny aircraft. As the flight of an aircraft with a wing area of 1–2 square meters is feasible, building larger and more efficient aircraft is also possible.
Article [35] suggested the notion of a small solar-powered UAV floating over Venus’ cloud cover. The design was carried out based on the Pioneer-Venus small atmospheric probe scale to reduce the mission expenses. It was supposed that the UAV would fit inside the probe aeroshell. In article [37], a study was carried out to determine the feasibility of using an aircraft as a long-duration flight platform inside the atmosphere of Venus. The power plant for the vehicle had to be capable of working for prolonged periods to accomplish a long-range flight. A solar energy control system using a photovoltaic array as the main power source was analysed to assess their flight altitude range in order to do this. This study was conducted for a station-keeping mission in which the vehicle had to sustain a flight over a ground area. This requires that the vehicle, at a given altitude, is able to travel faster than the wind speed. This study was also carried out to determine the altitude range and maximum length of a vehicle not necessary to operate the station at a given site. The findings of the study indicate that inside some areas of Venus’ atmosphere, each type of flight vehicle and power device is capable of flying. The aircraft is a functional framework for both station-keeping and non-station-keeping activities.
In [38], the authors consider using a cycloidal blade system to construct a stopped-rotor cyclo-copter vehicle during a mission to Venus as a means of supplying lift and propulsive thrust and in conjunction with a stopped rotor system. This stopped-rotor cyclo-copter would fly for experimental investigation at all atmospheric depths of Venus and land on the Earth. In RotCFD, three conceptual reference models of varying stopped-rotor cyclo-copter yaw angles are tested, and a hovering cyclo-rotor model for comparison with the recent literature work and groundbreaking testing future projects. Table 2 shows the comparison between the parameters of various Venus UAVs.
2.1.3. Titan UAVs
The NASA Johns Hopkins University Applied Physics Laboratory [42] proposed a mission concept for Titian UAV exploration in February 2017. Early conceptualization began in 2008 when NASA and the ESA developed the Montgolfiere style balloon concept. While a pathfinder would explore the surface of Titan, the balloon would act as a flagship. The idea of using a UAV was presented after adjustment to the initial concept. The UAV used an eight-bladed rotor design with vertical take-off and landing capabilities, labelled the Dragonfly. The Dragonfly will be able to explore both Titan’s surface and the atmosphere [42].
2.1.4. Designing Mars UAV
The Mars UAV is based on a vehicle system; however, it has been adapted to match the thrust requirements of Mars’ thin atmosphere. The Mars UAV system was created to create a model that could resist Mars conditions, such as dust storms and temperature shifts during night and day. When the UAV is expected to fly out of sight of the operator or to perform complex manoeuvres for which the control response from manual operation is insufficient, autonomy is required. The benefits of Mars UAV systems over helicopter vehicles motivated the development of the Mars UAV. When performing manoeuvres, the helicopter requires a complicated system to regulate the pitch of the rotors. On the other hand, UAVs can change their orientation simply by changing the rotor speeds. All three movements, roll, pitch, and yaw, may be accomplished simply by delivering appropriate signals to the motors to alter rotor speeds without any mechanisms or mechanical control. The negative of the Mars UAV system is that huge rotors require a significant amount of actuation effort to accelerate up or slow down, resulting in a delayed reaction time. The variable pitch is employed for very large rotors because motors cannot rapidly accelerate up or down.
The idea of flying UAVs on Mars is to show that with significant rotor blade design optimisation, enough lift can be created to fly a lightweight UAV in the thin atmosphere. The design also emphasises making the flight and operation autonomous and mapping the surrounding terrain and path planning to help the ground-based rover go beyond its existing capabilities. The Mars UAV will be used in high tip Mach numbers and low Reynolds numbers. To minimise the development of unwanted shock waves, it is critical to maintain subsonic speed at the rotor’s tip in a generic rotor design.
If not anticipated beforehand, the produced shock waves significantly impact the rover’s lift-generating capabilities. Because the air density on Mars is so low, rotating the rotor is greater while keeping the tip speeds subsonic is advantageous. The vehicle’s hovering will be controlled in the same way any UAV flying under Earth settings. The suggested controller, specifically developed to manage the co-axial rotors, will handle the roll, pitch, and yaw movement instructions. The lower gravity value will assist the vehicle in remaining stable while flying and prevent tiny instabilities produced by unstable phugoids [43]. The suggested rotor blade size is 1.12 m, and when placed co-axially, two rotors spin in opposing directions.
The entire mass of the UAV is estimated to be roughly 6 kg [44]. In the CAD modelling section of this project, parts of the onboard payload and system requirements will be explored. A radioisotope thermoelectric generator is now used to power Mars rovers. However, radioisotope thermoelectric generators have poor efficiency, and it is not suited for UAVs due to the hefty subsystem necessary to regulate the heat created. The Mars UAV is meant to run entirely on solar power. The Mars UAV’s longer arms help mount roll-out solar arrays. These solar panels may be extended for charging and retracted for flight. Flight data from the Ingenuity helicopter project will assist in determining whether or not a powered fight is conceivable in Mars’ atmosphere and how to pursue this notion in terms of boosting payload mass while lowering system mass [45]. For more details, the design of UAV for Mars exploration is discussed in detail in [44,46,47].
3. Preliminary Studies
This section discusses previous majorly failed space missions and UAVs used for space exploration.
3.1. Previous Major Devastating Failed Missions in Space Exploration
The main objective of a vehicle sent for space exploration is to explore the terrain appropriately, map over the wide region of the planetary body, and get information that is better in both quantity and quality. This section provides prior failure in space exploration through various techniques used. However, many works have attempted to cover the application of UAVs in space to achieve QoS, such as throughput, low latency, uniform coverage, reduced overhead, and connectivity backhaul [48,49,50,51,52,53,54,55,56,57,58,59]. Furthermore, UAVs have been proposed to extend and improve the capabilities of rovers and landers for planetary exploration.
Various approaches used earlier for planetary exploration have many limitations. Landers are limited to the landing site’s surrounding area and can only explore appropriate terrain. For example, the range reported by the JPL for the MER is a total distance of 1 Km, whereas a Mars UAV can potentially explore 500 Km [26]. Since landers may have minimal (or no) freedom to walk around freely, they have only had a single, one-time body experience. In sterile conditions, certain landers, such as Huygens on Titan or Mars landers, must be designed to prevent Earth contamination [60]. Rovers have some benefits over stationary landers, as they examine more territory and lead to exciting features. However, the greater likelihood of loss, owing to landing and other threats, is the downside of rovers relative to orbiters and that they are limited to a restricted area around a landing site that is only roughly expected. Moreover, owing to the contact time delay between Earth and other planetary bodies, travelling safely from rock to rock or position to location is a big challenge. The rover drivers on the spatial body cannot immediately see what is happening to a rover at any given moment, unlike a remote-controlled vehicle, and they could not send fast instructions to prevent the rover from crashing into a rock or falling down a cliff [61]. From the Yutu (from 2013–2016) and the Opportunity (2004–2018), the rovers have just been able to drive up-to-the-distance of 0.1 and 45.16 km, respectively [62]. Table 3 discusses some of the major previously failed missions for planetary exploration.
Compared to landers and rovers, an orbiter can gather a lot more data, which helps get more accurate information about the planetary body it is researching. Orbiters are capable of spatial mapping over wide regions, but the resolution of the orbiter is limited to a few meters. Furthermore, the danger from meteoroids and atmospheric debris to the space shuttle orbiter can be broken down into two elements: the possibility that the space shuttle orbiter or crew will be hit (susceptibility) and the likelihood that the mission will be disrupted by an impact [63]. Another very popular approach for investigating the planetary body is sending a human crew to that spatial body. However, sending human crew for space missions is too complex, too expensive, and it seemed to be unnecessary [64].
Furthermore, sending astronauts on a space mission causes severe health issues. As discussed earlier, these health issues can have both short-term and long-term effects. An example of human life at risk is, at NASA, a total of 17 astronauts lost lives in the Space Shuttles Challenger and Columbia tragedies and the Apollo launch pad fire in 1967 [65]. Furthermore, sending human pilots on the spatial body will reduce the station timings. When landers, orbiters, rovers, and human crew are limited, UAVs may be used to accomplish many mission objectives. Exploring the spatial body through UAVs will clearly give more station time, cover the more significant part of the body, and thus, provide huge information [61]. The use of UAVs would balance the analysis, risk of execution, and expense in the field of space exploration. Unlike orbiters, UAVs are nearer to the celestial body’s surface; therefore, the information will be comparatively more accurate.
3.2. Different Types of UAVs in Space
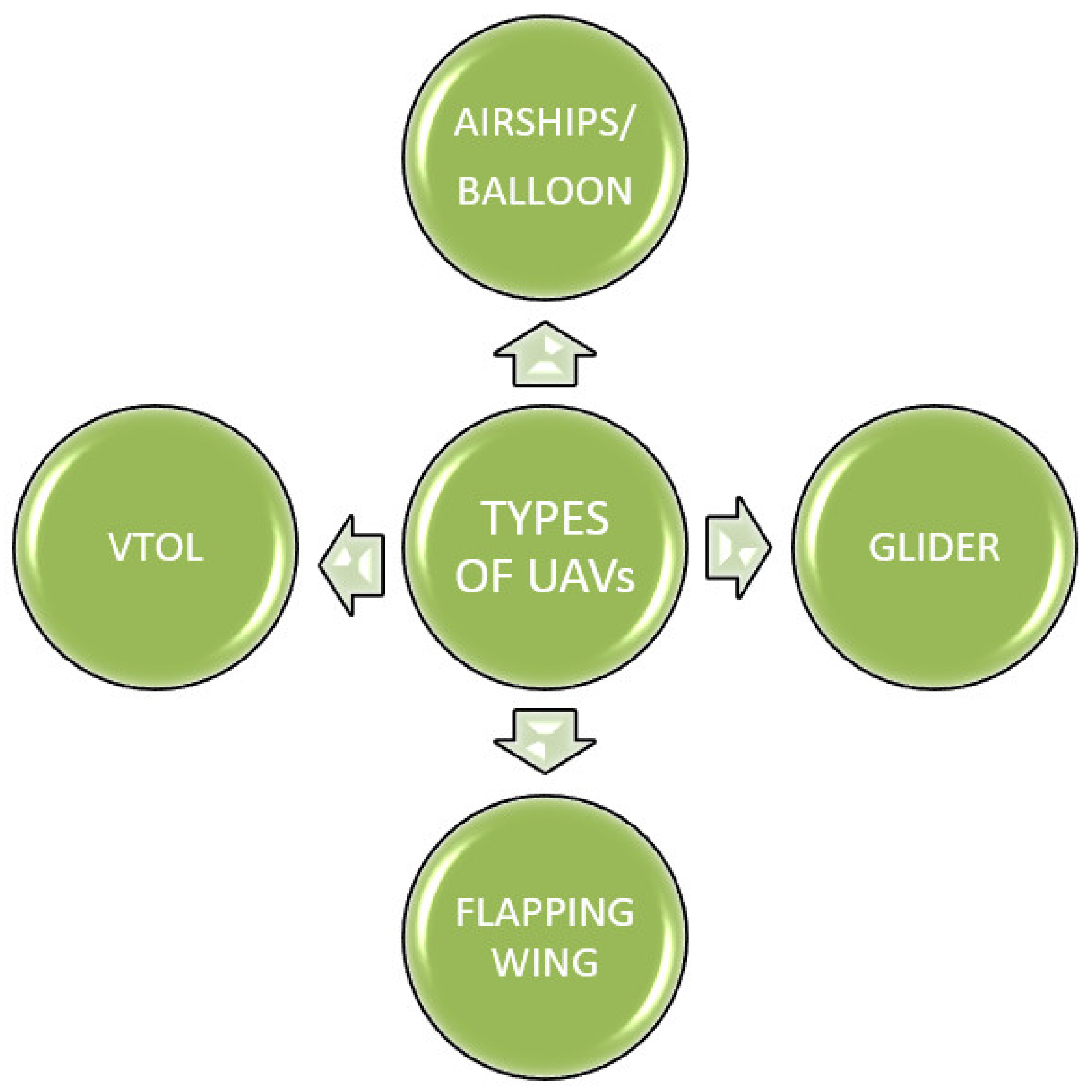
It is necessary to justify how UAVs fulfil the primary mission specifications for specified missions to target solar bodies. For instance, it will be a challenge for traditional UAV geometry to travel on other solar bodies. In addition, the size and weight of the UAVs are usually constrained because of the packaging restrictions imposed on the intended solar bodies by the launch vehicle [70]. Therefore, different aerodynamic, performance, regulation, and structural analyses are carried out in the design process to improve the performance of the UAVs. For planetary exploration, there are many configurations, such as balloons, airships, fixed wings, helicopters, rotary wings cyclocopters, gliders, VTOLs, flapping wings, and tilt-rotors. Figure 1 shows the type of UAVs for planetary investigation.
3.2.1. Airships and Balloons
An airship or balloon is an aircraft carrier that requires no external power to navigate [71]. The balloon is a straightforward technology that requires no power to maintain altitude. Power is only required for instruments and payloads. However, balloons face many difficulties in changing the altitude and location. For example, it cannot stay in the Sun. Balloons also face difficulty in station keeping them, concluding that they are not flexible enough in atmospheric science. However, airships are challenging to place and deploy at a low speed [72]. There are three different kinds of balloons capable of planetary exploration, including super pressure balloons, standard helium balloons, and Montgolfiere balloons.
- ➢
- Super balloons: With no open ducts, these ULDBs are completely sealed. Carbon does not escape from the balloon and, as the gas expands, pressure builds up. Super pressure balloons can travel for a longer duration because of the reduced leakage of the gas inside the balloon. Due to their form, they are also known as the Pumpkin. A Super Pressure Balloon is considered a balloon that often holds a positive inner pressure compared to the atmosphere in which it is floating. Super Pressure Balloons consist of a particular volume of estimated helium lifting gas. Specific altitude and a well-known mass of a payload hanging from a balloon are explicitly planned. The quantity of helium initially inserted into the balloon is determined by how much it is required to lift the whole flight mechanism and have an upward force of some additional helium. When the float height is reached, this excess helium is adequate to pressurise the balloon evenly. It has a greater internal pressure as the Sun heats the balloon during the day and at night when it cools down to have much lighter differential pressure. The differential pressure is above the atmospheric pressure.
- ➢
- Helium Balloon: Standard helium balloons are capable of space discovery, but relative to super-pressure balloons, they have a significantly shorter lifespan. The continual process of solar heating that takes place every day allows typical helium balloons to last as little as a few days [48].
- ➢
- Montgolfiere balloons: A Montgolfière works exceptionally well for the climate at low temperatures. Thus, making its place in exploring space. Instead of using helium gas, this balloon uses the planet’s natural ambience to explore the spatial body [48].
Balloons are considered explicitly for exploring the surface of Venus. This is because of the noteworthy benefit of Venus’ carbon dioxide atmosphere that enables a far wider variety of balloon-lifting gases (not just the hydrogen or helium commonly used by terrestrial balloons). In reality, oxygen and nitrogen are gas lifters in the atmosphere of Venus. Two other lifting gases at the altitudes considered are water and ammonia.
In 1985, the Russian ‘VEGA’ experiment successfully demonstrated ballooning in the atmosphere of Venus, the first space mission to float in the atmosphere of a planet other than Earth to date. The Russian Halley’s Comet probe delivered the two VEGA balloons (along with the help of two surface landers) while it executed a Venus gravity-slingshot technique. Two balloons were launched into the atmosphere and floated at about 54 km for 48 hrs [73]. Aside from Venus, balloons have been considered to explore several other planets (such as Mars’ surface and Titans’ moon). The viability of balloon missions on other planets and celestial bodies have continued to be explored by NASA centres and private enterprise. NASA’s latest missions of concern are directed at Mars, Venus, and Titan. In situ observations at various altitudes, which are not possible for other platforms, such as satellites and rovers, can be made possible by balloons [74].
To spearhead future, more-ambitious efforts in Mars exploration through balloons, NASA Jet Propulsions Laboratory started an experiment known as MABTEX. For Titan, NASA has established many mission ideas that are collectively referred to as the Titan Biological Explorer. One of the designated mission concepts involves a balloon that will descend to the surface of Titan, collect information, re-ascend, and travel to a new location [75]. Lately, different types of prototypes have been suggested for the Earth-based balloon-UAV hybrid platform that can also be used for planetary exploration [76]. Balloons are being made from materials strong enough to withstand both high temperatures and acidic climates. The balloon actually consists of a compact envelope that has the advantage of simplified transport storage. The flexible envelope will need an inner layer to protect from extreme temperatures and an outer layer to provide tensile stability. Furthermore, a corrosive barrier coating will be applied to shield the framework from the acidic climate. The innermost coating would be used to prevent gas escape, the outer material would provide structural stability, and the outermost layer would shield the structure from corrosion.
3.2.2. VTOL
VTOL is created by incorporating the advantages of both multi-copter and fixed-wing aircraft. Multi-copters can perform vertical take-offs and landings, but their rotary-wing rotor could not pass the sound velocity. On the other side, aircraft can go higher, but heavy lift requires an airstrip. Similar is the case for space exploration. A separate control technique is necessary to transform flight modes between horizontal and vertical configurations in other solar bodies. However, it is possible to imagine hybrids of flying wing and rotary wing UAVs as the future of space UAV setups [77]. The latest studies have focused on the possibility of designing aerial VTOL vehicles that could assist in our solar system’s discovery of different celestial bodies. Specifically, the effectiveness of VTOL vehicles is being researched to support missions to Mars’ surface, Titan, and Venus. The NASA Ames Research Centre studied different rotary-wing aero-mechanics and proof of concept problems underlying the production of vertical lift aerial vehicles for planetary science missions [78]. In addition, the performance of rover and rotor measurements by creating a required condition of atmosphere on Mars’ surface, co-axial helicopter through radio control to promote studying Mars’ surface, VTOL aircraft for studying titan surface [79]. NASAs’ Mars helicopter mission 2021 is a groundbreaking vehicle in space. At 2400 rotations per minute, one of these rotors would be about four feet long, tip to tip, and turn. That is about ten times the velocity of an Earth helicopter, representing the extra work taken for the craft to travel in the thin atmosphere of Mars. Indeed, provided the air pressure at the planned landing scale of Mars 2021 is equal to around 100,000 feet above the surface of the Earth, it would mean that the Mars Helicopter would be operating at altitudes never achieved by any terrestrial chopper.
3.2.3. Glider
A glider is an aircraft of a unique nature and has no engine. In-flight, in contrast to the four forces operating on a powered aircraft, a glider has three forces. The forces of lift, drag, and weight are revealed to all aircraft types. The powered aircraft has a thrust-producing motor, although there is no thrust in the glider [79]. In the 1960s to 1970s, NASA thought of using another concept for space exploration: the paraglider. Invented in the early 1960s by Francis M. Rogallo, the Rogallo wing used lightweight fabric airfoils arranged in a V-shape. More accurate than a parachute, the lightweight wing could be guided. Plus, instead of a splash landing in the water, the astronauts could operate the wing to glide to a stable landing on the ground. First, Rogallo thought about using the versatile recreational wing. After deciding that there was nowhere to market his proposal for public use, he presented it to the space industry. It may not be used for space landings, but it has become part of a common sport. Kitty Hawk, North Carolina, where the Wright Brothers discovered another famous way to fly, is one of the most popular places in America for hang gliding [24]. Today, NASA hopes to deploy a small glider fleet to explore parts of Mars that other spacecraft cannot reach. Adrien Bouskela, Aman Chandra, and colleagues at the University of Arizona claimed to use gliders for Mars exploration. Their concept is to propel an unpowered glider into the Mars atmosphere and hold it aloft to achieve altitude by using thermal updrafts to lift columns of warm air. For a larger mission to Mars, the glider would be inflatable and packed in a volume compact enough to be transported as a secondary payload [5].
3.2.4. Flapping Wing Drone
Flying a UAV for an interplanetary mission, such as for Mars, Venus, and Titan, is a major challenge, largely because of environmental constraints. The generated lift force of a wing is proportional to the atmospheric density, velocity, and wing area, as shown previously. Perhaps new flying concepts, such as flapping wings, can be well adapted for the low density and highly viscous atmosphere for this purpose [80]. As the power base of the UAV, the ornithopter or ‘flapping wing’ incorporates bird flight dynamics [81]. Due to the severe power requirements for the flapping process, there will be a lack of manoeuvrability and flight time as major drawbacks. However, the ornithopter UAV may become more popular with time as this technology progresses.
A rigorous sizing approach based on theoretical and mathematical analyses is suggested and experimentally tested to design successful FWMAVs [82]. High endurance and high-range flights are not ideal configurations for flapping wings for planetary exploration. These UAVs can only be used at low speeds on short-range missions.
In 2006, the European Association of Aerospace Students called the ARMaDA and the MAREA, proposed new architectural ideas for UAVs to be flown on Mars. Three different mission designs were suggested to explore Mars through a UAV [82]. In 2007, a UAV named MIRAGE was developed and investigated for Mars exploration at Miami. The MIRAGE combines a blended wing body configuration, as well as a lift fan to achieve VTOL. The nose of the UAV has a four-bladed propeller that produces horizontal thrust [19]. Later the Argo VII Mars aircraft was planned and patterned according to NASA’s ARES-2 specification in 2008. A flapping winged aerobot for autonomous flight in Mars’ atmosphere was also suggested in 2008. The architecture of this flapping wing was well suited to the low density of the Mars atmosphere [83]. Finally, the aerodynamic design of a Mars UAV for the Mars mission started in 2009 from Tohoku University. This research aimed to design a high-performance wing for low Reynolds numbers in the Mars environment [84].
In 2012, for the discovery of Titan using UAVs, a mission concept was suggested. The UAV, known as the AVIATR, will explore Titan’s global features, including geology/hydrology and lower atmospheric structures [85]. Northrop Grumman researchers created a Venus mission model called VAMP in 2013. They created an inflatable, propeller-powered UAV that can fly in Venus’ atmosphere for a year-long cruise. The built UAV can reach the atmosphere of Venus without an aeroshell after all. In a vacuum, the UAV will inflate and have a protected entry that allows for continuous data collection during descent. In 2015, a new SESPA was proposed. SESPA was proposed for Venus exploration at altitudes ranging from 71.5 to 75 Km concerning the long rotation period of Venus and the high value of its atmospheric density. In 2015, NASA Armstrong Engineering proposed designing and producing the prandtld-based fixed-wing prandtl-m, which will make the first flight to Mars in 2020. This UAV is deployed at an altitude of 100,000 feet, which simulates the flight conditions of the Mars atmosphere [86].
In 2016, a cycloidal blade system was proposed to construct a stopped-rotor cyclocopter UAV. It was combined with a stopped-rotor system to be flown in the Venus region. The designed stopped-rotor cyclocopter can fly in Venus’s atmosphere at all times. It can even land on Venus’ surface. The primary purpose of this analysis was to determine the atmospheric composition of Venus and the chemical composition of its surface. The groundbreaking feature of this work was the ability of the rotating blades of the cyclocopter to stop and act as a fixed-wing drone [87].
Furthermore, Ukrainian researchers performed a CO2-Powered Robotic Probe concept for Mars exploration in 2016. This b Hopper is a carbon dioxide-fuelled robotic probe that can skip like a grasshopper across the surface of Mars. This UAV uses a CO2 nuclear motor, while carbon dioxide is the main ingredient of Mars’ atmosphere. In 2017, the University of Alabama in Huntsville conducted a study to examine the potential of a flapping wing aerobot to achieve flight on Mars. The concept of the aerobot was influenced biologically by the bumblebee [88]. Humanity can now develop technologies that will facilitate human habitation on Mars thanks to the robotic expedition. Artificial intelligence and Machine Learning for supporting connectivity of robots, including UAVs, can achieve common tasks effectively and efficiently [89,90,91,92].
In February 2017, the NASA Johns Hopkins University Applied Physics Laboratory suggested a mission concept for UAV exploration of Titian. Since the surface of Titan would be investigated by a pathfinder, the balloon would act as a flagship. Upon alteration to the initial concept, using a UAV was suggested. The UAV, called the Dragonfly, used an eight-bladed rotor configuration with vertical take-off and landing capabilities. Both Titan’s crust and atmosphere will be able to be explored by the Dragonfly [93]. Table 4 shows the comparison between different types of UAVs used till now for planetary exploration.
4. Simulation Results and Discussion
UAVs can encounter various problems during a flight on an interplanetary mission, both internal and external obstacles. UAVs may become uncontrollable due to these issues, and they can crash or land on a hard surface. The UAV and its carrying equipment and information may also be destroyed in such situations. This results in significant losses of finances in addition to the loss of equipment and information. As a result, implementing a strategy that can gracefully cope with failures and ensure safe operation even in engine failure is a major challenge. In this section, the system model for effectively deploying the UAV on the planetary body’s surface is discussed, along with the parameters considered for the successful deployment of the UAV on Mars. The system model for the UAV deployment on Mars is designed to minimise the causes of the failure of a mission.
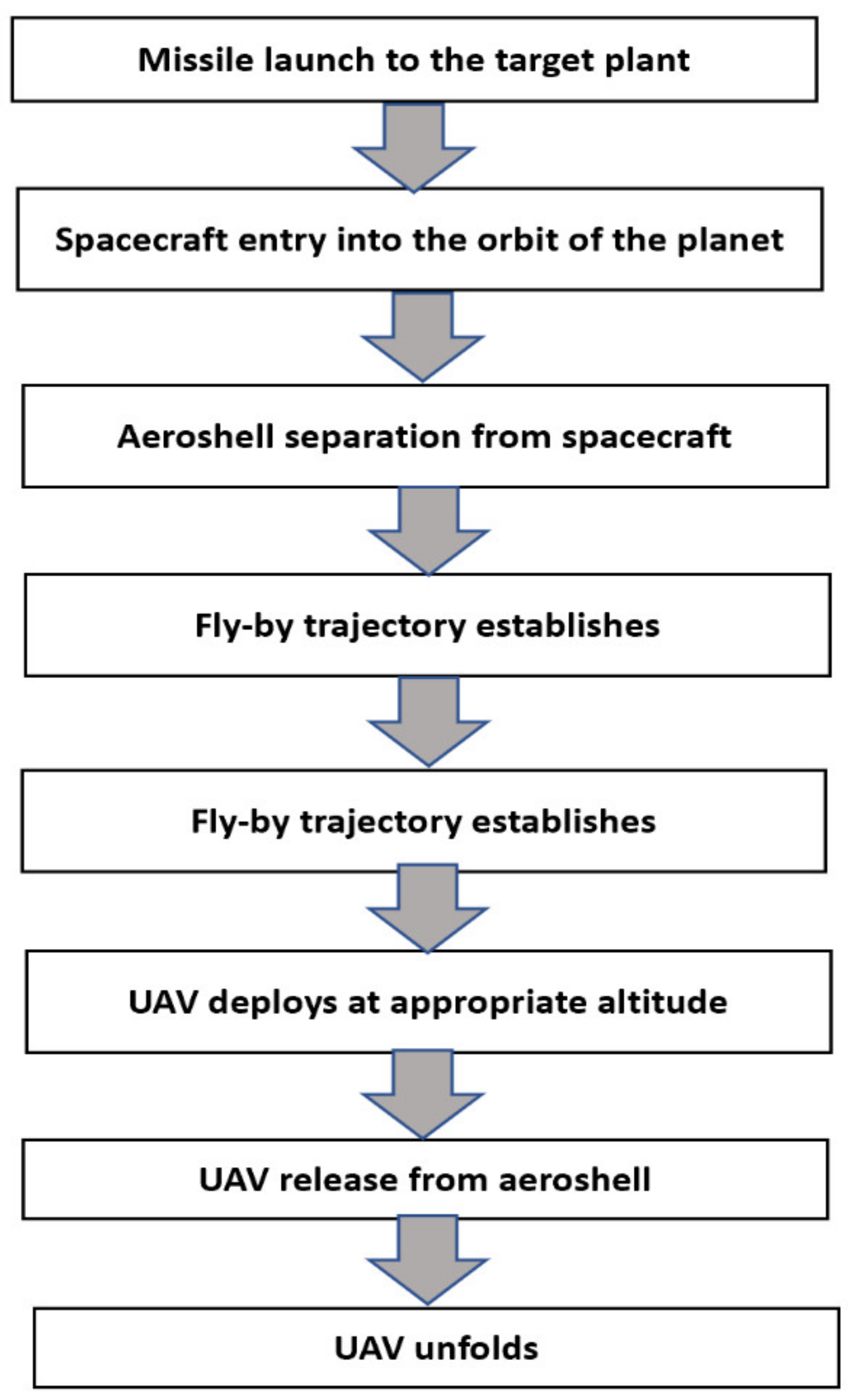
Figure 2 shows the system model for UAV deployment on Mars. The aeroshell separates from the spacecraft after the missile is launched to the targeted planet, and the spacecraft enters the planet’s orbit. The spacecraft performs a quick burn to set up a fly-by trajectory to release the aeroshell on an entry trajectory. The aeroshell should normally reach the atmosphere of the targeted solar at a shallow angle. Due to the shallow entry angle, space UAVs will deploy at sufficient altitudes to meet the flight level. After the deployment is complete, a pull-up operation is performed to determine the controlled flight level. In other words, the UAV should detach from the aeroshell during the deployment process. It should then deploy its tail and wings. UAVs should also recover from a dive while retaining as much altitude as possible.
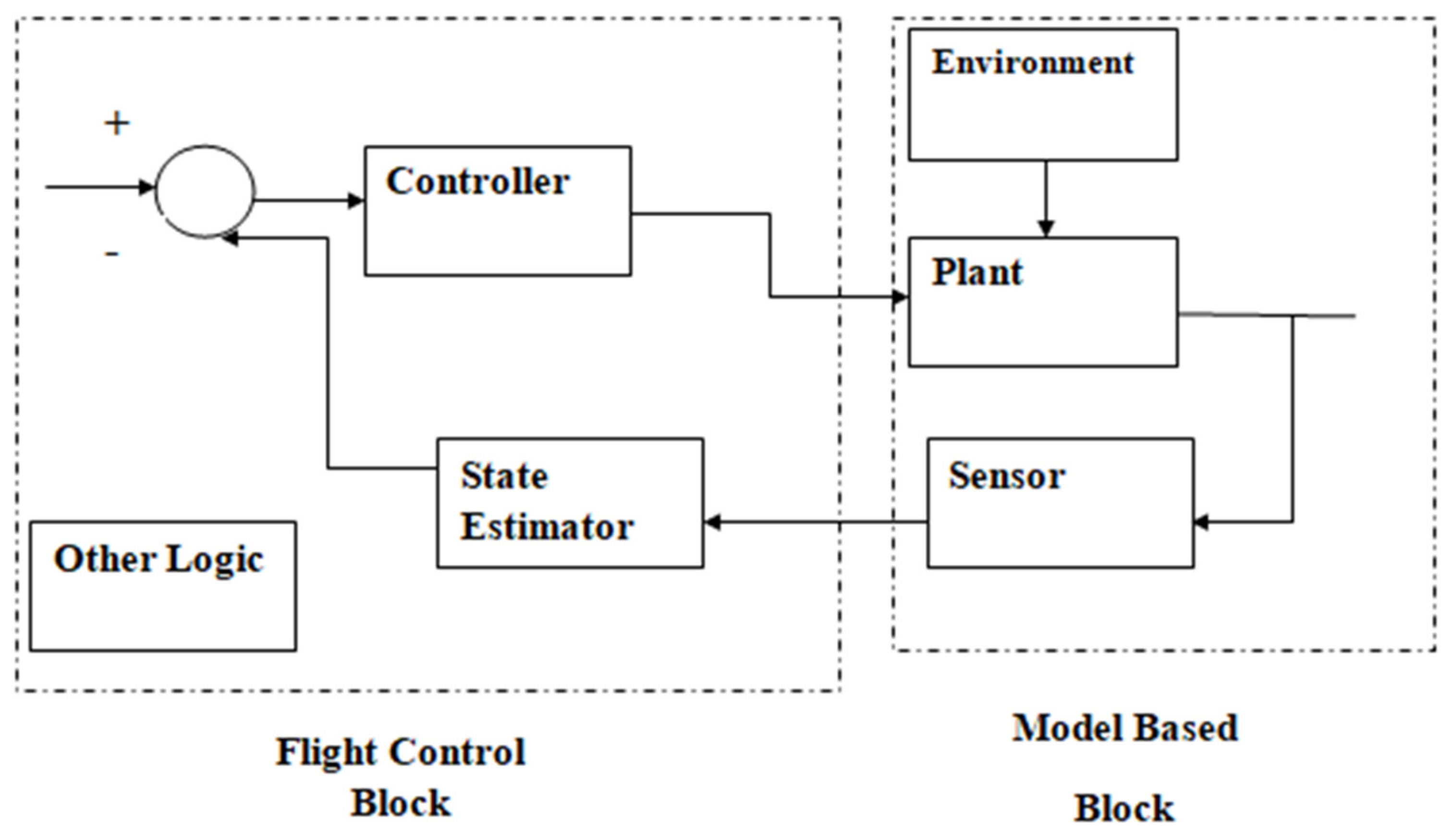
In our design model, we build a UAV prototype that is capable of flying on Mars’ surface. The model consists of two major blocks, i.e., flight-control block and model-based block. The flight-control block consists of the actual flight code and code control logic on the prototype UAV model. The flight-control block consists of a controller block, a state estimator block, and other logic blocks.
In the model-based block, model-based design is tuned and tweaks flight code. We can use this model code block to the real prototype UAV hardware model. The model-based design block consists of plant, environment, and sensor blocks. Figure 3 shows the block diagram of the prototype UAV model.
For the inside design of the various blocks and sub-blocks, it is necessary to have explicit knowledge about the aim of the UAV prototype. The environment in which the UAV is expected to have a flight and the surface conditions above which the flight is assumed to occur are some of the major concerns while designing the blocks.
For a successful UAV flight on Mars’ surface, changes in the Flight Control System (FCS), sensor, and environmental blocks are mainly required. Environment Block: In the environment block, the environment parameters are set. These environment parameters are necessary for a successful UAV flight on the surface of Mars. In our proposed model, a UAV prototype has been simulated that can be made suitable enough to operate in the environmental conditions of Mars. The simulated model operates on different planets (here, Mars). Table 5 shows the different environmental parameters set in the environment block to design the UAV prototype for the surface of Mars. The environmental parameters of Mars’ surface are taken from the values reported by Mariner 9 [94].
4.1. Environmental Conditions
To design the prototype UAV for Mars exploration, environmental conditions become a necessary consideration. Atmospheric pressure, air temperature, gravity, speed of sound, and air density are some of the mandatory parameters that are discussed below.
4.1.1. Air Pressure
The air at any planetary body constitutes a weight, and it pushes against anything it comes in contact with. This pressure is known as atmospheric or air pressure. Air pressure is the force applied by the air on the planetary body (as gravity draws it towards the surface). The ability to fly vehicles to achieve lift is due to air pressure. According to Bernoulli’s Principle, faster-moving air has lower pressure while slower-moving air has higher pressure. That means that the air pressure on the bottom would be higher, pushing the plane upward. The air pressure value at the surface of Mars is approximately 610 Pascal [68].
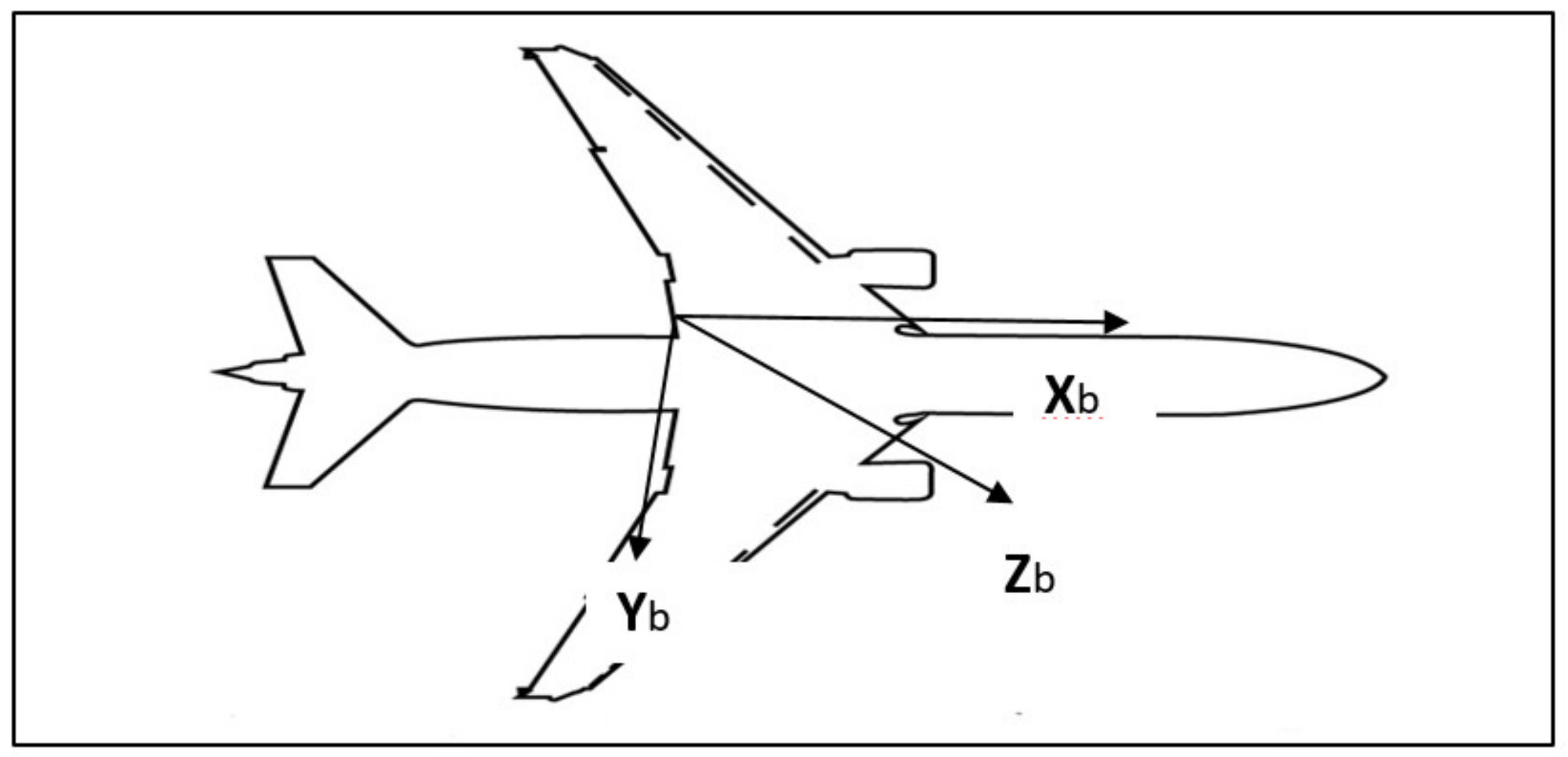
This means the air pressure on Mars is less than 1% of that on Earth. As a result, the air on Mars is significantly leaner than it is on Earth. As a result, the critical source of concern when developing a prototype UAV is whether there would be enough lift. The UAV is possibly heavier than air. For a UAV to fly successfully in a planets’ atmosphere, four forces are obligatory: lift, drag, weight, and thrust. Figure 4 shows the aerodynamics of the UAV. A coordinated system is used in the UAV flight. The coordinate system allows keeping track of an aircraft or Spacecraft’s position and orientation in space. Here, three coordinate systems are used in the UAV’s flight mechanism. These coordinate systems are:
- ➢
- Inertial System: Inertial system is attached to the planetary surface, does not move.
- ➢
- Fixed Body Frame: This frame is attached to the airframe and moves with the UAV.
- ➢
- Aerodynamic frame: The average velocity of the aircraft’s centre of mass defines this frame. The UAV is also equipped with a dynamic frame.
The three axes on the UAV prototype are Xb, Yb, and Zb. These represent the forward, right, and positive downward axis, respectively. The engine of a flying vehicle generally provides thrust. Thrust must surpass the vehicles’ drag for a successful flight. The wings provide the lift of the vehicle. UAV’s lift should equal its weight for the flight to flourish. The UAV’s smooth shape will probably reduce drag, and the materials it is made up of will affect its weight.
4.1.2. Gravity
Gravity is the force exerted on the object to pull it towards the centre of the planetary body. Two major forces, i.e., drift and weight affect the gravitational force. The weight of a flying vehicle is the force of gravity acting to pull the UAV to the ground and resolve via lift. Lift and gravity are two opposite forces. It is evident that for designing a prototype UAV, decreased weight and an increased lift are the two major goals to be achieved. Based on Newton’s theory of universal gravitation, when talking about a spherical body, such as a planet, the gravitational force is directly proportional to the planet’s mass and inversely proportional to the square of the radius of the planetary body. Equations (1) and (2) are based on Newton’s theory of universal gravitation and shows the formula for the gravitational force of Mars [95]. Table 6 shows the notation and parametric values of Equation (1) [96].
where:
g = Gm/r2
g = 3.711 m/s2
- g is the gravity of the Mars
- G is the gravitational constant
- m is the mass of the planet Mars
- r is the radius of the Mars

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 6.
Notation and parametric values.
| Parameters | Values |
|---|---|
| Gravitational Constant | 6.674 × 10−11m3 kg−1 s−2 |
| Mass of Mars | 6.42 × 1023 kg |
| Radius of Mars | 3.38 × 106 |
4.1.3. Air Density
Air density directly impacts UAVs aerodynamically and in terms of engine performance. Air density affects nearly every aspect of a UAV’s flight. In less dense air, standard measurements, such as take-off distances, rate of climb, landing distance, would all be increased, thus reducing the performance. Atmospheric density, in general, is defined as the mass per unit volume of a planet’s atmosphere.
4.1.4. Air Temperature
Air temperature plays a vital part in the behaviour of the flight of UAVs. The lift generated by a UAV depends mainly on the air density. Air density depends on the air temperature and altitude. At higher temperatures, air density is reduced. As a result, a UAV will have to travel faster to generate enough lift for take-off. The air temperature at Mars is 210 K (approximately).
4.1.5. Speed of Sound
Speed of sound is defined as the distance travelled via sound waves in a unit of time. This parameter plays a significant role in designing the UAV prototype. Some of the major uses are:
- ➢
- Useful in separating the flight regimes into two distinct areas with distinct flow conduct.
- ➢
- Assists in converting compressible flow geometry to one that can be measured using simpler, incompressible methods.
- ➢
- Efficient air travel and the maximum practical flight speed will be restricted.
- ➢
- Provides a hint to the designer about how to drive this boundary higher. For example, the speed of sound at Mars’ surface is 240 m/s2, and [94] this is comparatively lower than the Earth’s (343 m/s2).
4.2. Sensors Block
The sensor block is designed as per the requirement for Mars exploration through the designed UAV prototype. The sensor block includes various sensors’ configurations. In our proposed model, we have included sensors, such as Inertial Measurement Unit (IMU), camera, pressure sensor, and an ultrasound sensor, which are discussed below:
4.2.1. Inertial Measurement Unit (IMU)
The IMU is used to monitor angular rates and translation accelerations. IMUs can track speed, position, accelerated specific force, and angular rate, among other things. An IMU’s tools have been used to collect various data types. The tools are:
- ➢
- Accelerometer: To capture speed and acceleration.
- ➢
- Gyroscope: A gyroscope is a device that measures spin and spindle speed.
- ➢
- Magnetometer: Cardinal direction is determined via a magnetometer.
4.2.2. Camera
A camera is for estimating optical flow. Optical flow is an image processing technique. The camera will take images at 60 frames per second (FPS) through the optical flow technique. This method will aid the sensor in determining how objects move from one picture to another. The UAV can calculate apparent horizontal motion or velocity using the camera sensor. An immersive stereoscopic teleoperation system navigation for UAV improves autonomous navigation and provides better capabilities for collecting video footage for training future autonomous and semiautonomous control policies is used here.
4.2.3. Ultrasound Sensor
An ultrasound sensor is used to determine altitude. First, the lateral distances are measured using an ultrasonic sensor. Then, it sends a high sound pulse and counts how long it takes for the sound to rebound off the ground and back to the sensor. The altitude between both the floor and the UAV can be calculated using these measurements. Unfortunately, after about 30 feet of altitude, the reflected sound is far too low for the sensor to detect.
4.2.4. Pressure Sensor
The pressure sensor is used to sense pressure, which will further work in calculating altitude. As the UAV flies higher in altitude, the pressure of the air falls slightly. The pressure sensor uses this trivial change in pressure to guesstimate how the elevation of the UAV changes.
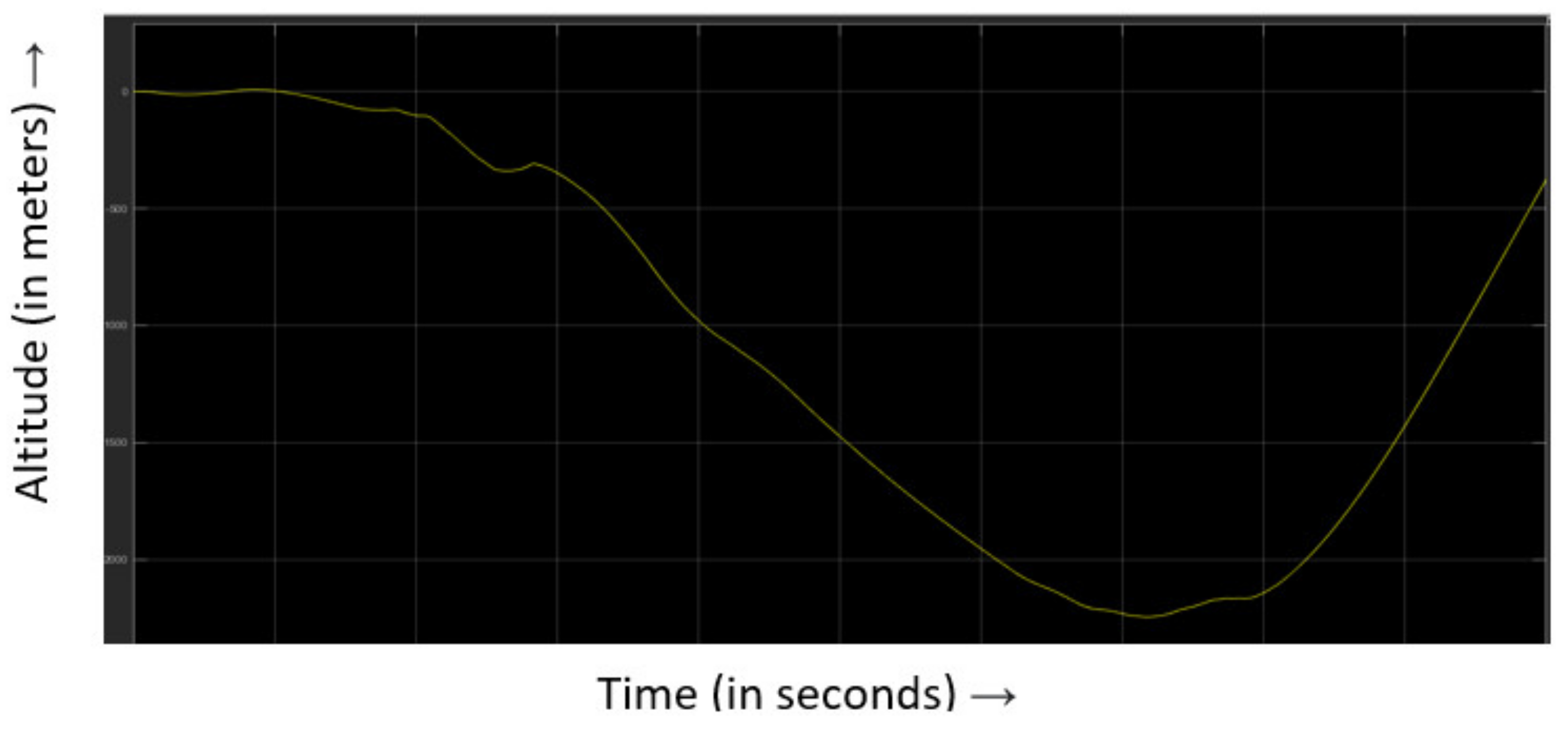
UAV will be deployed as a payload on Mars’ surface by a lander on the surface of Mars. Satellite communication is used to communicate between the lander, UAV, and Ground Control System (GCS). The Ka band (uplink: 34.2 to 34.7 GHz; downlink: 34.2 to 34.7 GHz) communicates between the UAV and the GCS. Figure 5 shows the UAV prototype graph for the flight on Mars’ surface. From the graph, it is observed that the UAV reaches a maximum altitude of 2200 m. The UAV then stabilised and hovered at an altitude of 380 m for around 1 min and 40 s. The rotors do not need to work as hard on Mars’ surface to counteract its effort since its gravity is only one-third that of the Earth, making it easier for them to work.
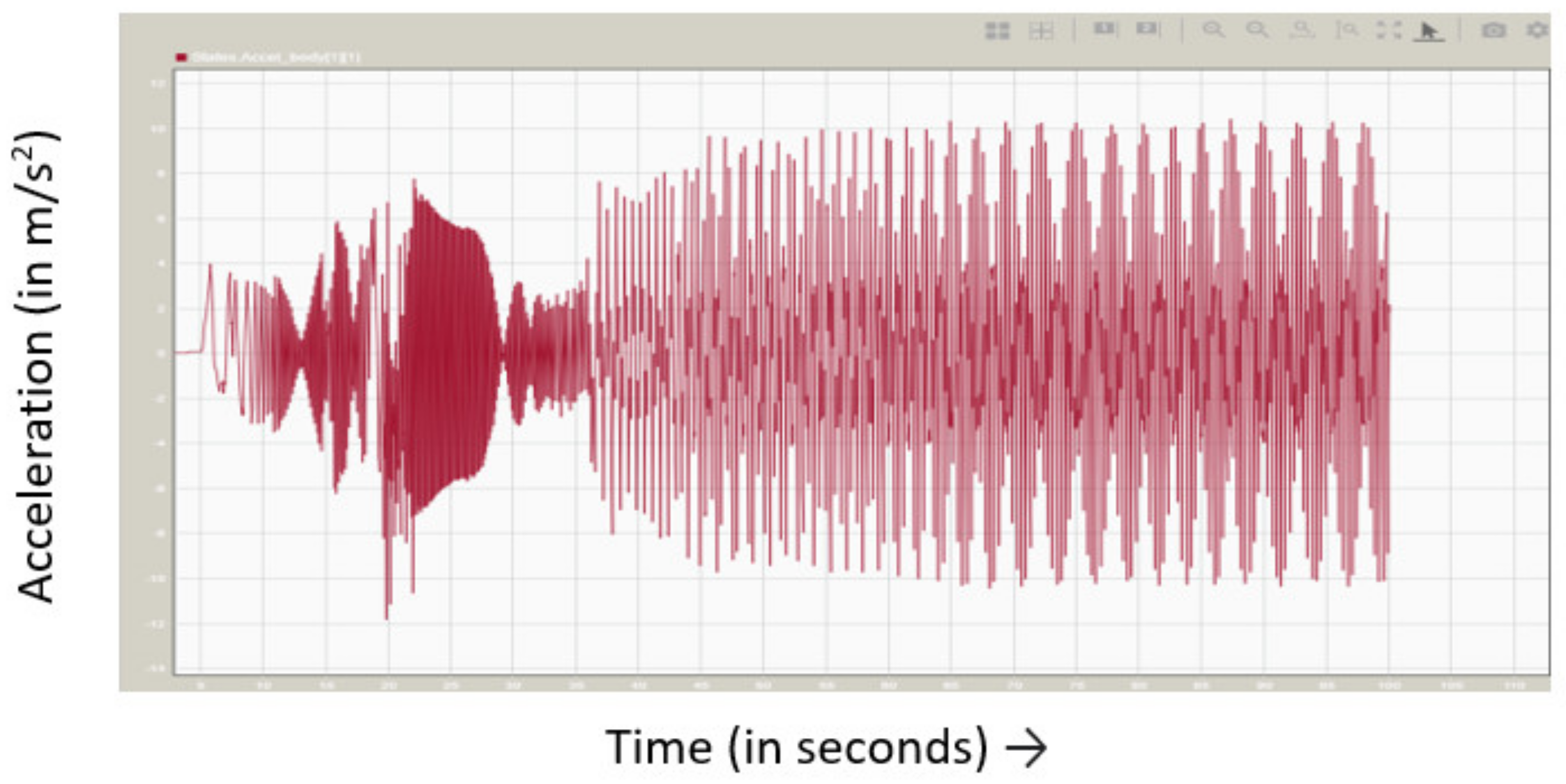
Since the air density of Mars’ surface is lower, the altitude is increased. Therefore, we may conclude from the above findings that it is possible to successfully deploy UAVs on Mars’ surface. However, other space exploration methods would be hampered by UAV’s problems. Figure 6 shows the acceleration graph for the UAV flight on the surface of Mars.
The acceleration graph is used to investigate the acceleration of the UAV prototype flight on Mars’ surface. The graph shows that the UAV prototype is initially at rest and that after acquiring a velocity of 8 m/s at 40 s, the UAV prototype becomes stable at an acceleration of 320 m/s2 and begins to hover. The acceleration is calculated through a fundamental formula: Acceleration = velocity/time.
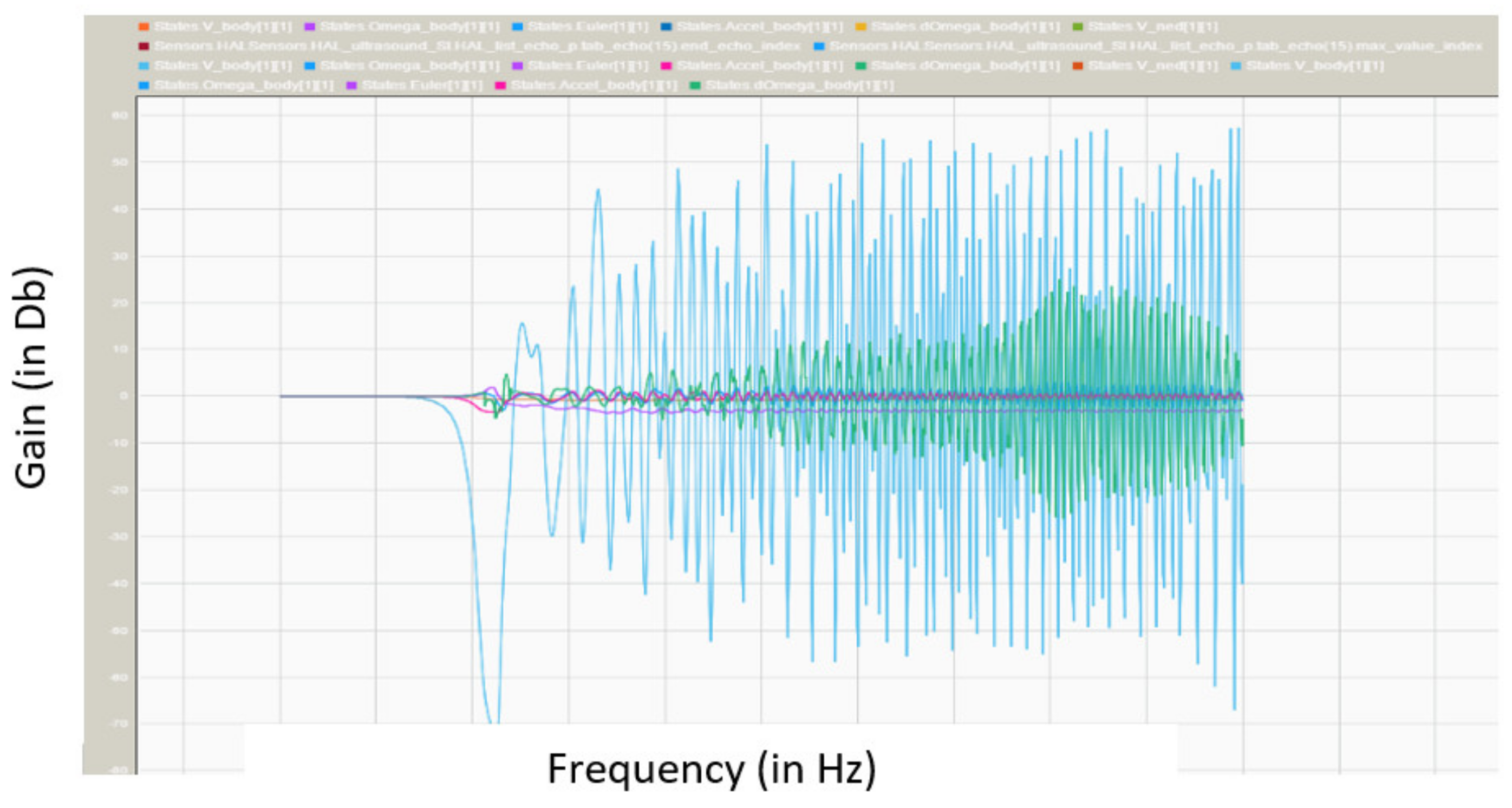
In addition, the data is organised into blocks, with each block containing one or more transactions. Each new block in a cryptographic chain binds to all the blocks before it so that tampering is nearly impossible. A consensus process validates and agrees on all transactions within the blocks, ensuring that each transaction is accurate and suitable. As a result, there was almost no chance of significant security threats for this Mars flight. Figure 7 shows the graph of the Euler’s angles and behaviour of various sensors inbuilt in the UAV, such as pressure sensor, camera, Inertial Measurement Unit (IMU) sensor, and an ultrasound sensor.
5. Opportunities, Challenges, and Future Scope
UAVs are considered to be a powerful tool for the exploration of planets. A portal for extremely high advancement in planetary exploration will be opened by using UAVs to explore a spatial body. Furthermore, UAVs can correct entry errors into the atmosphere and provide a fundamental scientific understanding of the planet’s atmosphere, surface, and interior. Therefore, there will be many opportunities to use UAVs for space exploration:
- ➢
- Ample economic power: Today’s space explorations are limited by the individual missions’ mass and life span considerations. Over time, the current power system is exhausted in the spacecraft, so the amount of usable power is reduced as the mission progresses. UAVs will open up the gateway of exploring a spatial body with plenty of economic power.
- ➢
- Scientific investigation: For the scientific investigation of the planet’s geology or even scouting missions for possible human outposts, a UAV might open up the opportunity by covering large regions of Mars.
- ➢
- Systematic mapping: UAVs fly independently or via remote control/piloting. Autonomous flights are pre-programmed with computers each time and are suitable for the systematic mapping of landscapes.
- ➢
- Affordable Space Access: Loading a single pound of mass into low Earth orbit costs around 10,000 USD today. The construction and manufacture of the launch system is a crucial part of this expense. Nearly 40% of the overall cost is attributed to processing from the ground and launch. The use of UAVs for interplanetary missions will allow access to space economically.
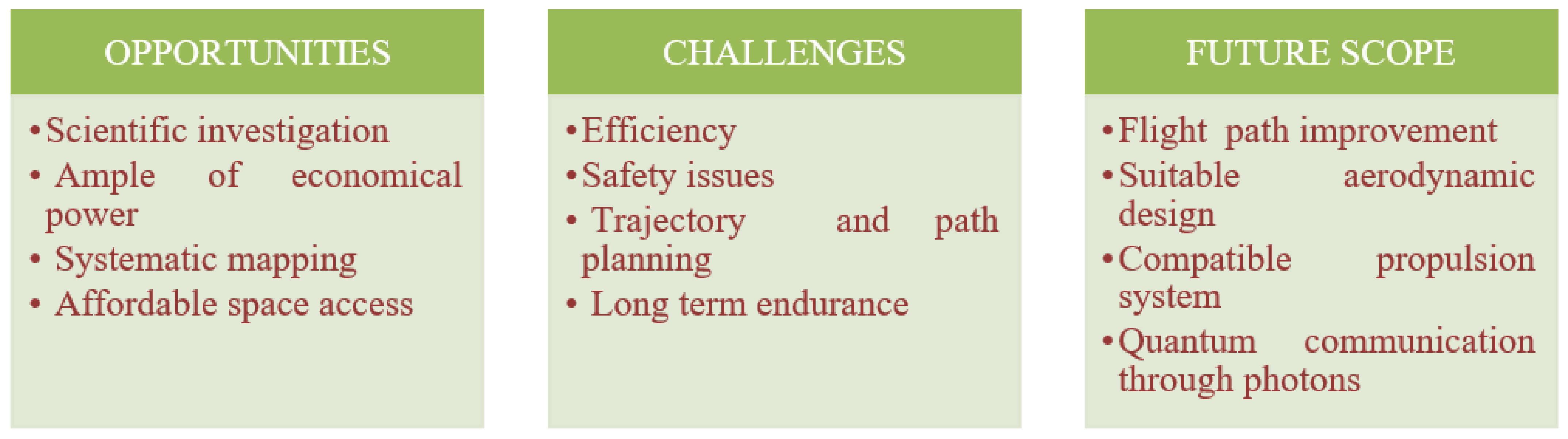
While these UAVs are useful for space exploration, there are still risks associated with the implementation, flying requirements, and data retrieval associated with the proposed concept. For those in the future working nearest to the research, costs, efficiency, and safety tend to be at the top of the agenda, yet these represent just a portion of sustainability concerns. Some factors, such as the UAVs’ trajectory planning, path planning, long-term endurance, best suited aerodynamic design, and compatible propulsion systems, should remain the top concern. It should be observed that the design and development of space UAVs should be accomplished depending on the environment. For one, because of the amount of gravity on Mars’ surface, the weights of the UAV should be monitored. The UAV’s endurance is largely restricted by the energy available. Mars’ surface went undercover a few years ago; Mars’ dust storms are common, but for unexplained causes, a gigantic one becomes global, covering the face of the planet every decade or so. However, Mars’ dust storms are not entirely harmless; storms can pose a deadly exploration threat. On Mars, individual dust particles are very tiny and mildly electrostatic, but they adhere like styrofoam packaging peanuts to the surfaces they touch [96]. The one that destroyed NASA’s Opportunity rover in 2018 by coating its solar panels in the dust is one big example. Different propulsion systems and fuel/oxidisers that supply the UAV with energy and the additional techniques that provide the UAV with ample power for a longer duration should be considered in the future. Future researchers are expected to improve the flight path based on motion, kinematics, and energies for flight endurance. Figure 8 shows the discussion on the opportunities, challenges, and future scope.
6. Conclusions
The most recent planetary exploration methods used (such as landers, orbiters, rovers) are very limited in versatility and resolution, and they provide little information about the planet. To address these issues, our proposal put heads together for the use of UAVs in space exploration. UAVs would be the most sought-after device for space exploration. Various studies for vehicles used to explore several solar bodies have been undertaken. Solar exploration through automated, semi-automated vehicles, and UAVs have been discussed. Various techniques used for space exploration are discussed. Previously, major catastrophic failed space exploration missions were examined, and the causes of their failure were investigated. Different types of UAVs used for space exploration have also been studied. In our research, we simulated a UAV prototype capable of a Mars mission and found that the probability of flying a UAV in the atmosphere of Mars has a high chance of success. Due to lesser gravity on the surface of Mars, the UAV acquires a higher altitude on the red planet. As a result, the UAV reaches the optimum height of 380 m on the surface of Mars. It is also observed that the UAV prototype remains initially at rest, then after achieving a velocity of 8 m/s in 40 s, the UAV prototype stagnates at 320 m/s2 and begins to hover. However, some challenges (such as cost and efficiency) for Mars’ exploration through UAVs exist. The scope, which includes flight path improvement, suitable aerodynamic design, and compatible propulsion system and quantum communication through photons, is addressed in the last section.
Author Contributions
Conceptualization, M.S., S.K.G., S.H.A., methodology, M.S., software, M.S., validation, M.S., S.K.G., S.H.A., formal analysis, M.S., A.G., investigation, A.V.S., S.K.G., resources, M.S., A.V.S., data curation, M.S., writing —original draft preparation, M.S., S.H.A., S.K.G.; writing—review and editing, M.S., A.V.S.; visualization, M.S., S.H.A.; supervision, S.K.G., S.H.A.; project administration, S.K.G., A.V.S.; funding acquisition, S.H.A., A.V.S., S.K.G. All authors have read and agreed to the published version of the manuscript.
Funding
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie grant agreement No. 847577; it has been also partially funded by Science Foundation Ireland (SFI) under Grant Number 16/RC/3918 (Ireland’s European Structural and Investment Funds Programmes and the European Regional Development Fund 2014–2020).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The study did not report any data.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| HAPP | High Altitude Powered Platform |
| PV | Photovoltaic |
| REMS | Rover Environmental Control Station |
| MSL | Mars Science Laboratory |
| ADS | Advanced Driving Support System |
| MAVeN | Mars Atmosphere and Volatile Evolution |
| VTOL | Vertical Take-off and Landing |
| AV | Air Vehicle |
| SESPA | Sun-Seeking Eternal Flight Solar-Powered Aeroplane |
| CASPER | Continuous Task Management, Preparation, Implementation, and Replanning |
| 3CS | Three Corner Sat |
| MER | Mars Exploration Rover |
| UCAV | Uninhabited Combat Aerial Vehicle |
| UCAV/S | Uninhabited Combat aircraft Vehicles |
| MAV | Micro Aerial Vehicle |
| FWMAV | Flapping Wing Micro Air Vehicles |
| NRL | Naval Research Laboratory |
| OSC | Orbital Sciences Corporation |
| MAP | Mars Aeroplane Kit |
| MATADOR | Mars Advanced Technology Aeroplane for Launch, Operations, and Recovery |
| BGS | Balloon Guidance System |
| VAMP | Venus Atmospheric Maneuverable Platform |
| JPL | Jet Propulsion Laboratory |
| DTE | Direct to Earth |
| DSN | Deep Space Network |
| DFDC | Deep Fake Detection Challenge |
| VAMP | Venus Atmospheric Manoeuvrable Platform |
| ASRG | Advanced Stirling Radioisotope Generator |
| GFT | Goal-Function Tree |
| ASC | Autonomous Science craft Constellation |
| Space RAS | Space Robotics and Autonomous Systems |
| RPV | Remotely Piloted Vehicle |
| FVO | Organic Aerial Vehicle |
| RPA | Remotely Piloted Helicopter |
| ULDB | Ultra-Long Distance Balloons |
| MABTEX | Mars Aerobot Technology Experiment |
| MSSS | Malin Space Science Systems |
| MAGE | Mars Airborne Geophysical Explorer |
| BIG BLUE | Baseline Inflatable-wing Glider |
| ESA | European Space Agency |
| AVIATR | Aerial Aircraft In-situ and Airborne Titan Reconnaissance |
| SESPA | Sun-Seeking Eternal Solar-Powered Aircraft |
| MAREA | Martial Aerial Research Euroavia Aeroplane |
| MCO | Mars Climate Orbiter |
| MPL | Mars Polar Lander |
| ARMaDA | Advanced Reconnaissance Mars Deployable Aircraft |
References
- Launius, R.D. Frontiers of Space Exploration; Greenwood Publishing Group: Westport, CT, USA, 2004. [Google Scholar]
- Available online: https://web.archive.org/web/20090702153058/http://adc.gsfc.nasa.gov/adc/education/space_ex/exploration.html (accessed on 30 November 2020).
- Ostro, S.J. Planetary radar astronomy. Rev. Mod. Phys. 1993, 65, 1235–1279. [Google Scholar] [CrossRef]
- Launius, R.D.; Conway, E.M.; Johnston, A.K.; Wang, Z.C.; Hersch, M.H.; Paikowsky, D.; Whalen, D.J.; Toldi, E.; Dougherty, K.; Hays, P.L.; et al. Spaceflight: The Development of Science, Surveillance, and Commerce in Space; IEEE: Hoboken, NJ, USA, 2012; Volume 100, pp. 1785–1818. [Google Scholar]
- Clarke, V.C.; Kerem, A., Jr.; Lewis, R. A mars airplane… oh really? In Proceedings of the 17th Aerospace Sciences Meeting, New Orleans, LA, USA, 15–17 January 1979. [Google Scholar]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Sharma, V.; Song, F.; You, I.; Chao, H.-C. Efficient Management and Fast Handovers in Software Defined Wireless Networks Using UAVs. IEEE Netw. 2017, 31, 78–85. [Google Scholar] [CrossRef]
- Kotecha, K.; Garg, D.; Mishra, B.; Narang, P.; Mishra, V.K. Background Invariant Faster Motion Modeling for Drone Action Recognition. Drones 2021, 5, 87. [Google Scholar] [CrossRef]
- Almalki, F.A.; Soufiene, B.O.; Alsamhi, S.H.; Sakli, H. A low-cost platform for environmental smart farming monitoring system based on IoT and UAVs. Sustainability 2021, 13, 5908. [Google Scholar] [CrossRef]
- Gupta, A.; Sundhan, S.; Gupta, S.K.; Alsamhi, S.H.; Rashid, M. Collaboration of UAV and HetNet for better QoS: A comparative study. Int. J. Veh. Inf. Commun. Syst. 2020, 53, 309–333. [Google Scholar] [CrossRef]
- Rashid, A.; Sharma, D.; Lone, T.A.; Gupta, S.; Gupta, S.K. Identity-Based Encryption in UAV Assisted HetNets: A Survey. In Proceedings of the 2019 10th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kanpur, India, 6–8 July 2019; pp. 1–6. [Google Scholar]
- Pergola, P.; Cipolla, V. Mission architecture for Mars exploration based on small satellites and planetary drones. Int. J. Intell. Unmanned Syst. 2016, 4, 142–162. [Google Scholar] [CrossRef]
- Lemke, L.G.; Heldmann, J.L.; Young, L.A.; Gonzales, A.A.; Gulick, V.C.; Foch, R.E.; Gundlach, J.F. Vertical Takeoff and Landing UAVS for Exploration of Recurring Hydrological Events; LPICo: Houston, TX, USA, 2012; Volume 1679, p. 4276. [Google Scholar]
- Catling, D.C.; Leovy, C. Mars Atmosphere: History and Surface Interactions. In Encyclopedia of the Solar System; Elsevier: Amsterdam, The Netherlands, 2007; pp. 301–314. [Google Scholar] [CrossRef]
- Guynn, M.; Croom, M.; Smith, S.; Parks, R.; Gelhausen, P. Evolution of a Mars Airplane Concept for the ARES Mars Scout Mission. In Proceedings of the 2nd AIAA “Unmanned Unlimited” Conference and Workshop & Exhibit, San Diego, CA, USA, 15–18 September 2003; p. 6578. [Google Scholar]
- Colozza, A. Preliminary design of a long-endurance Mars aircraft. In Proceedings of the 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990. [Google Scholar]
- Petritoli, E.; Leccese, F. Unmanned Autogyro for Mars Exploration: A Preliminary Study. Drones 2021, 5, 53. [Google Scholar] [CrossRef]
- SEMA HUSSEYIN1. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwjwx4Xcueb0AhVy6XMBHTIECEkQFnoECAYQAQ&url=https%3A%2F%2Fntrs.nasa.gov%2Fapi%2Fcitations%2F20160012562%2Fdownloads%2F20160012562.pdf&usg=AOvVaw2b62VpxMZeaDrOEfeOGRXX (accessed on 1 December 2021).
- Husseyin, S.; Warmbrodt, W.G. Design Considerations for a Stopped-Rotor Cyclocopter for Venus Exploration; NASA International Space University Intern, Aeromechanics Office, NASA Ames Research Center: Moffet Field, CA, USA, 2016. [Google Scholar]
- Young, L.A.; Lee, P.; Aiken, E.; Briggs, G.; Pisanich, G.M.; Withrow-Maser, S.; Cummings, H. The Future of Rotorcraft and other Aerial Vehicles for Mars Exploration. In Vertical Flight Society’s 77th Annual Forum & Technology Display; Vertical Flight Society: Fairfax, VA, USA, 2018. [Google Scholar]
- Williams, M. Available online: https://www.universetoday.com/35796/atmosphere-of-the-planets/ (accessed on 1 December 2020).
- The European Space Agency. Available online: https://www.esa.int/ESA_Multimedia/Images/2018/04/Comparing_the_atmospheres_of_Mars_and_Earth#:~:text=Mars%20is%20about%20half%20the,rich%20in%20nitrogen%20and%20oxygen (accessed on 1 December 2020).
- Titus, T.N.; Colaprete, A. Mars Atmospheric Surface Interactions and the CO2 Cycle. 2005. Available online: https://ui.adsabs.harvard.edu/abs/2005EOSTr..86..462T/abstract (accessed on 5 December 2020). [CrossRef]
- Reed, R.D. High-Flying Mini-Sniffer RPV-Mars Bound; NASA Flight Research Center Edwards: Edwards, AL, USA, 1978. [Google Scholar]
- Walker, D.D. Preliminary Design, Flight Simulation, and Task Evaluation of a Mars Airplane; University of Tennessee: Knoxville, TN, USA, 2008. [Google Scholar]
- Smith, S.; Hahn, A.; Johnson, W.; Kinney, D.; Pollitt, J.; Reuther, J. The design of the Canyon Flyer, an airplane for Mars exploration. In Proceedings of the 38th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2000; p. 514. [Google Scholar]
- Mottinger, B.; Muckenthaler, J.; Wicklund, D.; Young, C.; Graham, C.; Schell, E.; Sunkel, J. Mars Aerial Research Vehicle MARV. In Proceedings of the Third Annual HEDS-UP Forum, Houston, TX, USA, 4–5 May 2000; pp. 57–76. [Google Scholar]
- Available online: http://blogs.discovermagazine.com/drone360/2015/08/03/nasa-wants-to-putdrones-to-work-on-mars/#.WWfoFLaQzIU (accessed on 1 December 2020).
- Michael Ravine. Available online: http://www.msss.com/news/index.php?id=11 (accessed on 5 December 2020).
- Colozza, A.; Landis, G.; Lyons, V. Overview of Innovative Aircraft Power and Propulsion Systems and Their Applications for Planetary Exploration; National Aeronautics and Space Administration: Dayton, OH, USA, 2003. [Google Scholar]
- Braun, R.D.; Wright, H.S.; Croom, M.A.; Levine, J.S.; Spencer, D.A. Design of the ARES Mars airplane and mission architecture. J. Spacecr. Rocket. 2006, 43, 1026–1034. [Google Scholar] [CrossRef]
- Peeters, B.; Mulder, J.A.; Kraft, S.; Zegers, T.; Lentink, D.; Lan, N. ExoFly: A Flapping Winged Aerobot for Autonomous Flight in Mars Atmosphere; College of Information Sciences and Technology: State College, PA, USA, 2008. [Google Scholar]
- Malin, M.C. Mars Airborne Geophysical Explorer (MAGE), a Proposal to NASA AO No. 98-OSS-04 (Discovery Program); Malin Space Science Systems, NASA Ames Research Center, Orbital Sciences Corporation, and the Naval Research Laboratory, NASA Ames Research Center: San Diego, CA, USA, 1998. [Google Scholar]
- Balaram, B.; Canham, T.; Duncan, C.; Grip, H.F.; Johnson, W.; Maki, J.; Quon, A.; Stern, R.; Zhu, D. Mars Helicopter Technology Demonstrator. In Proceedings of the 2018 AIAA Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 18. [Google Scholar]
- Grip, H.F.; Scharf, D.P.; Malpica, C.; Johnson, W.; Mandic, M.; Singh, G.; Young, L.A. Guidance and Control for a Mars Helicopter. In Proceedings of the 2018 AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Bluman, J.E.; Kang, C.K.; Landrum, D.B.; Fahimi, F.; Mesmer, B. Marsbee—Can a bee flfly on mars? In Proceedings of the AIAA SciTech Forum—55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Prinn, R.G.; Fegley, B., Jr. The atmospheres of Venus, Earth, and Mars: A critical comparison. Annu. Rev. Earth Planet. Sci. 1987, 15, 171–212. [Google Scholar] [CrossRef]
- Available online: https://en.wikipedia.org/wiki/Atmosphere_of_Venus#:~:text=The%20atmospheric%20pressure%20at%20the,of%20the%20Earth’s%20total%20atmosphere (accessed on 5 December 2020).
- Available online: https://solarsystem.nasa.gov/planets/Venus/overview/#:~:text=Even%20though%20Venus%20isn’t,clouds%20made%20of%20sulfuric%20acid.&text=Venus%20is%20similar%20in%20size,just%20a%20little%20bit%20bigger (accessed on 5 December 2020).
- Available online: http://www.ajax.ehu.es/VEX/Venus.Earth/Venus.Earth.html#:~:text=Venus%20is%20often%20named%20as,with%20a%20complex%20weather%20system.&text=Both%20planets%20have%20almost%20the,to%20the%20Sun%20than%20Earth (accessed on 5 December 2020).
- Landis, G.A. Exploring Venus by solar airplane. AIP Conf. Proc. 2001, 552, 16–18. [Google Scholar] [CrossRef] [Green Version]
- Lorenz, R.D. A review of balloon concepts for Titan. J. Br. Interplanet. Soc. (JBIS) 2008, 61, 2–13. [Google Scholar]
- Pipenberg, B.T.; Keennon, M.; Tyler, J.; Hibbs, B.; Langberg, S.; Balaram, J.; Grip, H.F.; Pempejian, J. Design and Fabrication of the Mars Helicopter Rotor, Airframe, and Landing Gear Systems. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 0620. [Google Scholar]
- Patel, A. Design, Modelling, and Control of a Space UAV for Mars Exploration; Lulea University of Technology: Lulea, Sweden, 2021. [Google Scholar]
- Johansson, M. Experimental and Computational Evaluation of Capabilities of Predicting Aerodynamic Performance for a Mars Helicopter Rotor; Chalmers University of Technology: Gothenburg, Sweden, 2017. [Google Scholar]
- Mishra, I.; Kumar, A.; Malhotra, V. Conceptual Design of an Unmanned Aerial Vehicle for Mars Exploration. Eur. J. Eng. Technol. Res. 2021, 6, 111–117. [Google Scholar] [CrossRef]
- DeSouza, C. Conceptual design of an unmanned aerial vehicle for mars exploration (MISCAV). In Proceedings of the 44th Lunar and Planetary Science Conference, Bruxelles, Belgium, 5 August 2013; pp. 1–2. [Google Scholar]
- Alsamhi, S.H.; Almalki, F.A.; Ma, O.; Ansari, M.S.; Angelides, M.C. Performance optimization of tethered balloon technology for public safety and emergency communications. Telecommun. Syst. 2019, 75, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Alsamhi, S.H.; Rajput, N. HAP antenna radiation pattern for providing coverage and service characteristics. In Proceedings of the 2014 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Delhi, India, 24–27 September 2014; pp. 1434–1439. [Google Scholar]
- Al-Samhi, S.; Rajput, N. Interference environment between high altitude platform station and fixed wireless access stations. System 2012, 4, 5. [Google Scholar]
- Alsamhi, S.H.; Gupta, S.K.; Rajput, N.S. Performance evaluation of broadband service delivery via tethered balloon technology. In Proceedings of the 2016 11th International Conference on Industrial and Information Systems (ICIIS), Roorkee, India, 3–4 December 2016; pp. 133–138. [Google Scholar]
- Alsamhi, S.H.; Ansari, M.S.; Zhao, L.; Van, S.N.; Gupta, S.K.; Alammari, A.A.; Saber, A.H.; Hebah, M.Y.; Alasali, M.A.A.; Aljabali, H.M.; et al. Tethered Balloon Technology for Green Communication in Smart Cities and Healthy Environment. In Proceedings of the 2019 First International Conference of Intelligent Computing and Engineering (ICOICE), Hadhramout, Yemen, 15–16 December 2019; pp. 1–7. [Google Scholar]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Mohd Shah, N.S.; Alsamhi, S.H.; Abdullah, Q.; Farah, N. Distributed Clustering for User Devices Under Unmanned Aerial Vehicle Coverage Area during Disaster Recovery. arXiv 2021, arXiv:2103.07931. [Google Scholar]
- Alsamhi, S.; Rajput, N. Methodology for coexistence of high altitude platform ground stations and radio relay stations with reduced interference. Int. J. Sci. Eng.Res. 2012, 3, 1–5. [Google Scholar]
- Alsamhi, S.; Ma, O.; Ansari, M. Predictive estimation of the optimal signal strength from unmanned aerial vehicle over internet of things using ANN. arXiv 2018, arXiv:1805.07614. [Google Scholar]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Alsamhi, S.H.; Hawbani, A. Multi-UAV and SAR collaboration model for disaster management in B5G networks. Internet Technol. Lett. 2021, e310. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Al-Dois, H.; Shvetsov, A.V.; Ansari, M.S.; Hawbani, A.; Gupta, S.K.; Lee, B. Multi-Drone Edge Intelligence and SAR Smart Wearable Devices for Emergency Communication. Wirel. Commun. Mob. Comput. 2021, 2021, 6710074. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Shah, N.S.M.; Alsamhi, S.H.; Abdullah, Q. Energy-Efficient Tethered UAV Deployment in B5G for Smart Environments and Disaster Recovery. In Proceedings of the 2021 1st International Conference on Emerging Smart Technologies and Applications (eSmarTA), Sana’a, Yemen, 10–12 August 2021; pp. 1–5. [Google Scholar]
- Alsamhi, S.H.; Almalki, F.; Ma, O.; Ansari, M.S.; Lee, B. Predictive Estimation of Optimal Signal Strength from Drones over IoT Frameworks in Smart Cities. IEEE Trans. Mob. Comput. 2021, 1. [Google Scholar] [CrossRef]
- Sharma, V.; Srin ivasan, K.; Chao, H.C.; Hua, K.L.; Cheng, W.H. Intelligent deployment of UAVs in 5G heterogeneous communication environment for improved coverage. J. Netw. Comput. Appl. 2017, 85, 94–105. [Google Scholar] [CrossRef]
- Rumford, T.E. Demonstration of autonomous rendezvous technology (DART) project summary. In Space Systems Technology and Operations; SPIE: Washington, DC, USA, 2003; Volume 5088, pp. 10–19. [Google Scholar]
- Available online: https://www.popsci.com/military-aviation-amp-space/article/2009-03/gallery-top-10-nasa-probe-failures/ (accessed on 21 February 2021).
- Blackburn, M.; Busser, R.; Nauman, A.; Knickerbocker, R.; Kasuda, R. Mars Polar Lander fault identification using model-based testing. In Proceedings of the 26th Annual NASA Goddard Software Engineering Workshop, Greenbelt, MD, USA, 5–6 December 2002; pp. 128–135. [Google Scholar]
- Available online: https://en.wikipedia.org/wiki/NOAA-19 (accessed on 21 February 2021).
- Available online: https://mars.nasa.gov/news/1854/the-fact-and-fiction-of-Martian-dust-storms/ (accessed on 24 February 2021).
- Withers, P.; Weiner, S.; Ferreri, N.R. Recovery and validation of Mars ionospheric electron density profiles from Mariner 9. Earth Planets Space 2015, 67, 23403. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://phys.org/news/2016-12-strong-gravity-mars.html#:~:text=On%20top%20that%2C%20the%20gravity,only%2038%20kg%20on%20Mars (accessed on 7 April 2021).
- Available online: https://byjus.com/physics/value-of-g/ (accessed on 7 April 2021).
- Withers, P.; Felici, M.; Mendillo, M.; Moore, L.; Narvaez, C.; Vogt, M.F.; Jakosky, B.M. First ionospheric results from the MAVEN radio occultation science experiment (ROSE). Journal of Geophysical Research: Space Physics 2018, 123, 4171–4180. [Google Scholar] [CrossRef]
- Available online: https://en.wikipedia.org/wiki/Aerobot/ (accessed on 22 January 2021).
- Available online: http://www.gaerospace.com/tag/space-balloons/ (accessed on 22 January 2021).
- Salazar, R.D.; Hassanalian, M.; Abdelkefi, A. Defining a conceptual design for a tilt-rotor micro air vehicle for a well-defined mission. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; p. 0239. [Google Scholar]
- Young, L.A.; Aiken, E.W.; Derby, M.R.; Johnson, J.L.; Navarrete, J.; Klem, J.; Torres, R. Engineering Studies into Vertical Lift Planetary Aerial Vehicles. In Proceedings of the AHS International Meeting on Advanced Rotorcraft Technology and Life Saving Activities, Utsunomiya, Tochigi, Japan, 11–13 November 2002. [Google Scholar]
- Available online: https://www.grc.nasa.gov/www/k-12/airplane/glidshuttle.html (accessed on 23 January 2021).
- Available online: https://www.nasa.gov/audience/forstudents/58/features/IdeaTimeCome_Feature_5_8.html (accessed on 24 January 2021).
- Available online: https://www.technologyreview.com/2019/02/20/137335/the-future-of-mars-exploration-may-rest-on-a-glider/ (accessed on 24 January 2021).
- Michelson, R.C.; Naqvi, M.A. Beyond Biologically Inspired Insect Flight. von Karman Institute for Fluid Dynamics RTO/AVT Lecture Series on Low Reynolds Number Aerodynamics on Aircraft Including Applications in Emergening UAV Technology; von Karman Institute for Fluid Dynamics: Sint-Genesius-Rode, Belgium, 2003; pp. 1–19. [Google Scholar]
- Available online: https://www.911security.com/learn/airspace-security/drone-fundamentals/types-of-drones-flapping-wing (accessed on 25 January 2021).
- Hassanalian, M.; Abdelkefi, A.; Wei, M.; Ziaei-Rad, S. A novel methodology for wing sizing of bio-inspired flapping wing micro air vehicles: Theory and prototype. Acta Mech. 2016, 228, 1097–1113. [Google Scholar] [CrossRef]
- Oyama, A.; Fujii, K. A Study on Airfoil Design for Future Mars Airplane. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006. [Google Scholar]
- Barnes, J.W.; Lemke, L.; Foch, R.; McKay, C.P.; Beyer, R.A.; Radebaugh, J.; Atkinson, D.H.; Lorenz, R.; Le Mouélic, S.; Rodriguez, S.; et al. AVIATR—Aerial Vehicle for In-situ and Airborne Titan Reconnaissance. Exp. Astron. 2011, 33, 55–127. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://www.nasa.gov/centers/armstrong/features/mars_airplane.html (accessed on 1 February 2021).
- Kooser, A. NASA Looks into Robot Bees for Mars Exploration. Available online: https://www.cnet.com/news/nasa-explores-mars-robot-bees-marsbees/ (accessed on 20 December 2021).
- Available online: https://phys.org/news/2017-05-titan-ripe-drone-invasion.html (accessed on 6 February 2021).
- Serna, J.G.; Vanegas, F.; Gonzalez, F.; Flannery, D. A Review of Current Approaches for UAV Autonomous Mission Planning for Mars Biosignatures Detection. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–15. [Google Scholar]
- Available online: https://www.space.fm/astronomy/planetarysystems/Landers.html (accessed on 19 February 2021).
- Available online: https://mars.nasa.gov/mer/mission/timeline/surfaceops/navigation./#:~:text=The%20rovers%20were%20designed%20to,they%20have%20gone%20much%20farther (accessed on 19 February 2021).
- Available online: https://en.wikipedia.org/wiki/Rover_(space_exploration)#/media/File:Driving_Distances_on_Mars_and_the_Moon (accessed on 19 February 2021).
- Alsamhi, S.H.; Almalki, F.A.; Afghah, F.; Hawbani, A.; Shvetsov, A.V.; Lee, B.; Song, H. Drones’ Edge Intelligence over Smart Environments in B5G: Blockchain and Federated Learning Synergy. IEEE Trans. Green Commun. Netw. 2021, 1. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Al-Dois, H.; Othman, S.B.; Hassan, J.; Hawbani, A.; Sahal, R.; Saleh, H. Machine learning for smart environments in B5G networks: Connectivity and QoS. Comput. Intell. Neurosci. 2021, 2021, 6805151. [Google Scholar] [CrossRef] [PubMed]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Convergence of Machine Learning and Robotics Communication in Collaborative Assembly: Mobility, Connectivity and Future Perspectives. J. Intell. Robot. Syst. 2019, 98, 541–566. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Survey on artificial intelligence based techniques for emerging robotic communication. Telecommun. Syst. 2019, 72, 483–503. [Google Scholar] [CrossRef]
- Available online: https://www.nap.edu/read/5958/chapter/4 (accessed on 19 February 2021).
- Available online: https://en.wikipedia.org/wiki/Atmosphere_of_Mars#:~:text=It%20also%20contains%20trace%20levels,1%25%20of%20the%20Earth’s%20value (accessed on 7 April 2021).
- Available online: https://mars.nasa.gov/mars2020/participate/sounds/#:~:text=With%20an%20average%20surface%20temperature,meters%20per%20second)%20on%20Earth (accessed on 8 April 2021).
- Available online: https://www.sciencemag.org/news/2020/11/Martian-dust-storms-parch-planet-driving-water-space#:~:text (accessed on 24 February 2021).
Figure 1.
Type of UAVs for planetary investigation.

Figure 2.
Methodology for the deployment of UAV on Mars.

Figure 3.
Block diagram of the prototype UAV model.

Figure 4.
Aerodynamics of the UAV.

Figure 5.
Altitude graph for a UAV flight on the surface of Mars.

Figure 6.
Acceleration of UAV on the surface of Mars.

Figure 7.
Graph showing the behaviour of various sensors in the UAV prototype model.

Figure 8.
Opportunities, challenges, and future scope.

Table 1.
Comparison in the parameters of various Mars UAVs.
| References | UAV | Power Supply | Range (km) | Endurance | Mass (kg) | Wingspan (m) |
|---|---|---|---|---|---|---|
| [18] (1975–1982) | Mini-Sniffer Aircraft | - | 70 | 1 h | 75.7 | 6.7 |
| [19] (1978) | Astroplane | - | 10,000 | 300 | 21 | |
| [5,25] (1998) | MAGE | - | 1800 | 3 h | 135 | 9.75 |
| [26] (1999) | Canyon Flyer | - | - | 15 min | 20 | 2.2 |
| [6,21] (2003) | 1. ARES-1 Aeroplane | Li/MnO2 batteries for electrical power | - | 6.33 | ||
| - | - | |||||
| - | - | 175 | 6.25 | |||
| 2. ARES-2 | ||||||
| [27,28] (2008) | ExoFly-DelFly 2 | Solar | 10 | 12 min | 0.02 | 0.35 |
| [29,30,31,32] (2014) | Mars Helicopter | Solar | - | 1.5 min | 1.8 | - |
| [33,34] (2017) | Marsbee | - | - | - | 2.14 × 10−4 | - |
Table 2.
Comparison between the parameters of Venus UAVs.
| References | Venus UAV | Wing Area (m2) | Chord Length | Mass (kg) | Wing Span (m) | Horizontal Tail Area | Vertical Tail Area | Power Supply |
|---|---|---|---|---|---|---|---|---|
| [36,39] (2002) | Large drone | 1.6 | 0.37 | 15 | 4.38 | 0.32 | 0.22 | Solar |
| [36,39] (2002) | Small drone | 1.2 | 0.4 | 10 | 3 | 0.12 | 0.06 | Solar |
| [37] (2005) | Aircraft flight | 16.2 | 1.8 | - | 9 | 2.33 | 0.45 | Solar |
| [40,41] (2013) | VAMP AV | - | - | 900 | 55 | - | - | Solar and ASRG |
| [19] (2015) | SESPA | - | 0.4 | - | 3 | - | - | Solar |
Table 3.
Discussion table on previously failed missions.
| Reference | Mission | Lander | Orbiter | Rover | Human Crew | Cause of Failure |
|---|---|---|---|---|---|---|
| [62] | MCO | ✕ | ✓ | ✕ | ✕ | Cost constraint. |
| [63] | Chandrayaan-2 | ✓ | ✓ | ✓ | ✕ | 500 m short of the lunar surface, Vikram Lander lost control and crashed with the Pragyan rover. |
| [64,65] | Columbia Space Shuttle | ✕ | ✓ | ✕ | ✓ | Damage in the left-wing. |
| [66] | Viking project | ✓ | ✓ | ✕ | ✕ | Software updates error. |
| [67,68] | DART project | ✕ | ✓ | ✕ | ✕ | Wrong estimation of distance through the computer. |
| [69]. | MPL | ✓ | ✕ | ✕ | ✕ | Faulty transmitter. |
| [69] | NOAH 19 | ✕ | ✓ | ✕ | ✕ | Mechanical malfunctioning. |
✕—No; ✓—Yes.
Table 4.
Comparison table for different types of UAVs for planetary exploration.
| Parameter | Types of UAVs for Space Exploration | |||
|---|---|---|---|---|
| Objective | Airship/Balloon | VTOL | Flapping Wing | Glider |
| Resolution image | ✓ | ✓ | ● | ✓ |
| Data transmission | ● | ✓ | _ | _ |
| Endurance | ✓ | ● | ● | ✓ |
| High altitude | ✓ | ● | _ | ✓ |
| Heavy payload | ✓ | _ | ✓ | ✓ |
✓: Satisfactory, ●: Limited, _: Information not available
Table 5.
Parameters considered for Mars flight.
| Parameters | Mars [91] (Reported) |
|---|---|
| Volume (km3) | 16.318 |
| Mass (1024 kg) | 0.64171 |
| Gravity (m/s2) | 3.711 |
| Air pressure (bars) | 6.1 × 104 |
| Air density | 0.020 |
| Speed of sound (m/s) | 240 |
| Atmospheric temperature (Kelvin) | 273 + 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sharma, M.; Gupta, A.; Gupta, S.K.; Alsamhi, S.H.; Shvetsov, A.V. Survey on Unmanned Aerial Vehicle for Mars Exploration: Deployment Use Case. Drones 2022, 6, 4. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6010004
AMA Style
Sharma M, Gupta A, Gupta SK, Alsamhi SH, Shvetsov AV. Survey on Unmanned Aerial Vehicle for Mars Exploration: Deployment Use Case. Drones. 2022; 6(1):4. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6010004
Chicago/Turabian StyleSharma, Manjula, Akshita Gupta, Sachin Kumar Gupta, Saeed Hamood Alsamhi, and Alexey V. Shvetsov. 2022. "Survey on Unmanned Aerial Vehicle for Mars Exploration: Deployment Use Case" Drones 6, no. 1: 4. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6010004