1. Introduction
Hoisting systems are widely applied in various industries, especially the mining industry. A mine hoist is a piece of key equipment for transporting ore, materials, and workers between the surface and underground. Hoisting containers are connected to hoist drums by wire ropes that are thousands of meters long, which means that rope tension plays a significant role in hoisting safety. Tension faults such as overload, underload, and imbalance are serious threats to hoisting safety and production. Therefore, it is of considerable significance to diagnose tension faults in hoisting systems [
1].
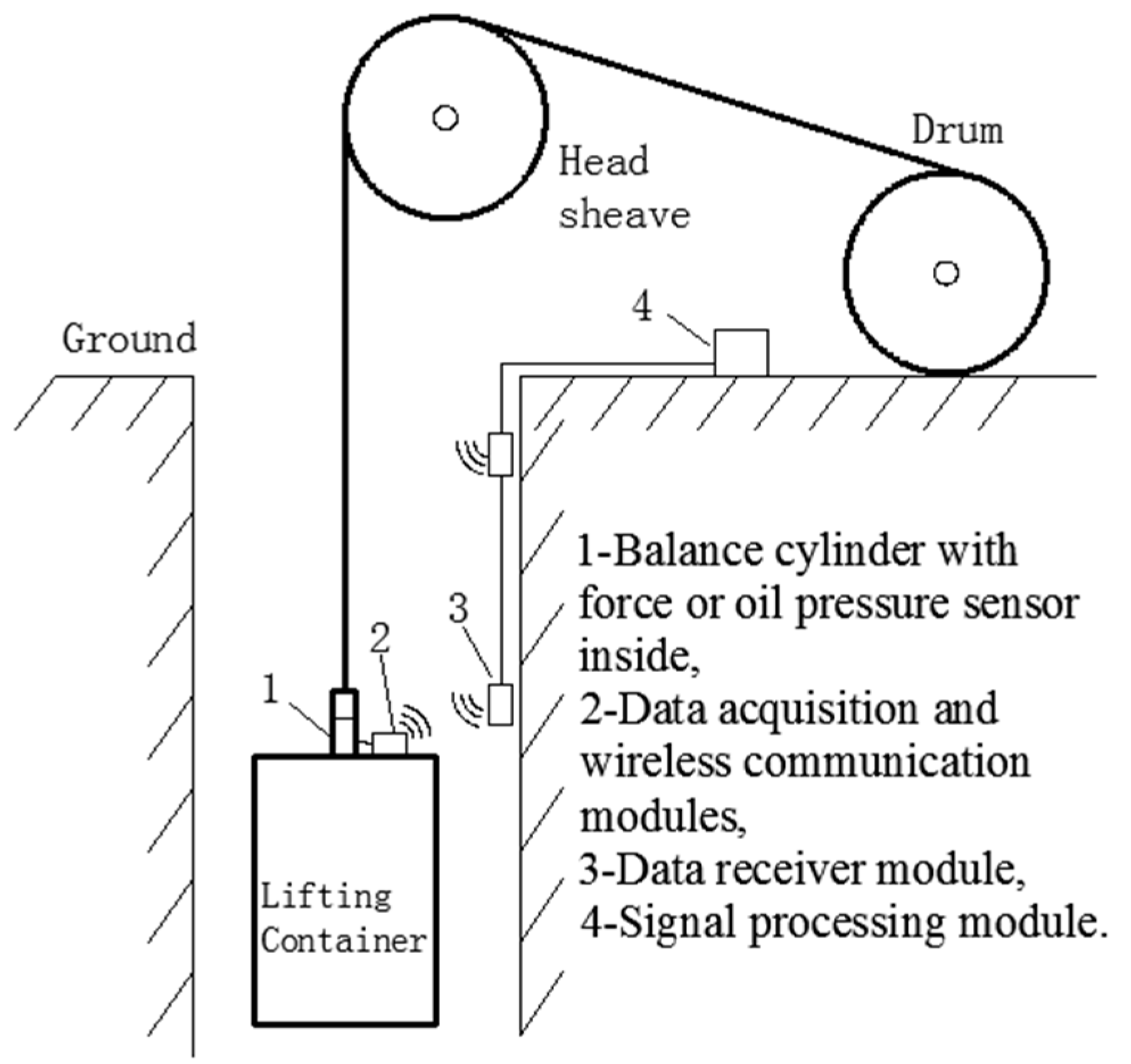
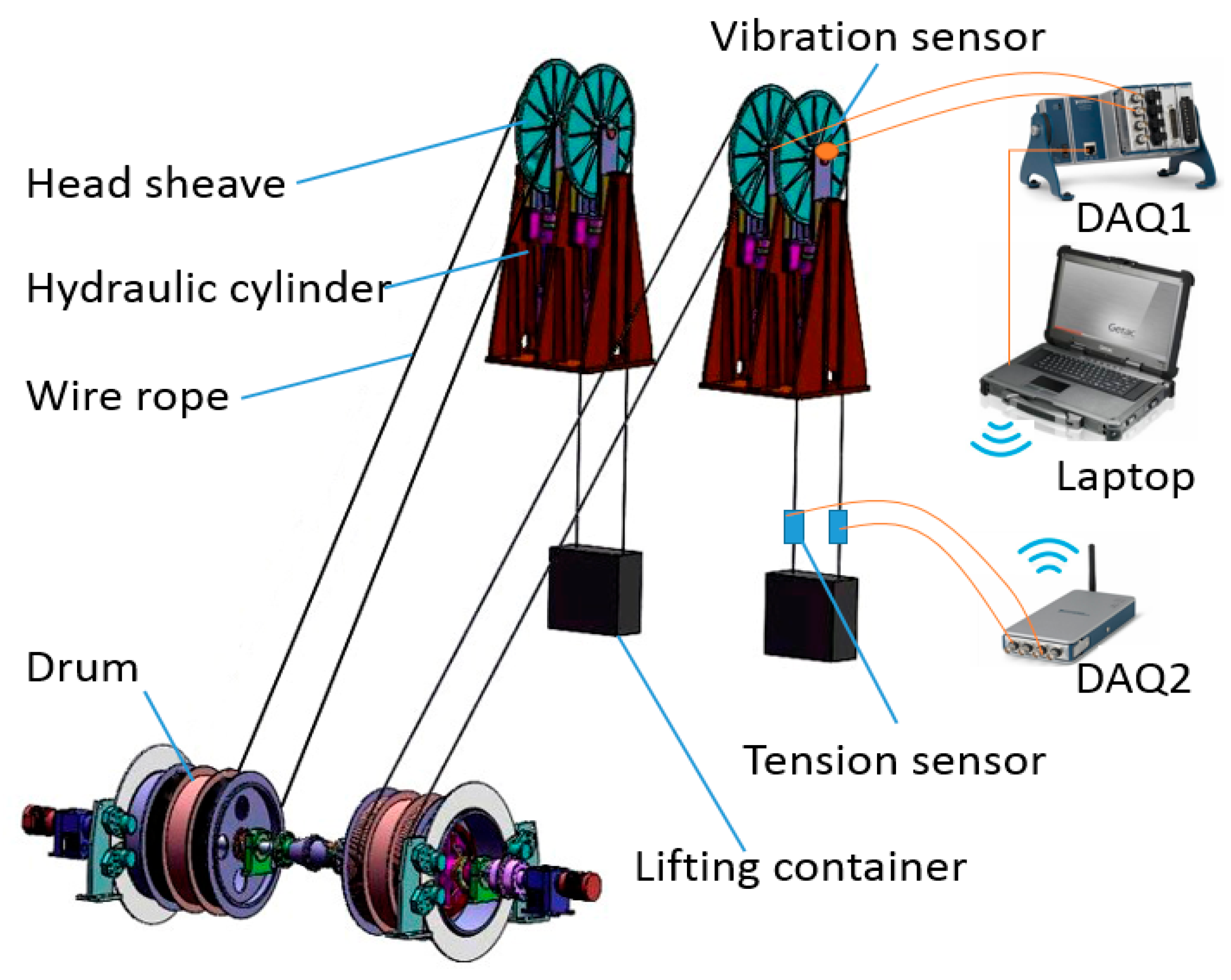
Conventional tension condition monitoring is based on force sensors or oil pressure sensors, which are installed at the connection between wire ropes and lifting containers [
2]. The data are transmitted through a long mine shaft to the ground by wireless communication, as shown in
Figure 1. However, this method faces several challenges. First, underground environments are very harsh because of spray water, dust, and corrosive gas, resulting in low reliability of the measuring devices. Second, power supply and data transmission in a moving cage are inconvenient. Moreover, the installation of force sensors may negatively impact the original structure, which leads to hidden danger and safety regulation violations [
3].
Mechanical vibration signals often contain sufficient information on the running state of mechanical equipment, so they are widely applied in fault diagnosis of gears, motors, and bearings [
4,
5,
6,
7]. Compared with the force-sensor based method, the vibration-based method has obvious advantages. First, vibration sensors are easy to install and do not damage the safety of the original structure. Second, vibration signals react immediately to changes. Third, processing techniques for vibration signals are abundant [
7]. Therefore, the vibration-based method provides a potential approach to diagnose rope tension faults in hoisting systems [
8].
Vibration signal processing usually consists of three steps, namely signal decomposition, feature extraction, and pattern recognition. Common signal decomposition methods include Fourier transform (FT)-based methods, wavelet transform (WT)-based methods, and empirical mode decomposition (EMD)-based methods [
7,
9]. The FT-based method is a traditional method to convert the time domain to the frequency domain. However, it is not suitable for non-stationary signals, which are quite common in the mining industry [
10]. Although short-time Fourier transform (STFT) improves the FT method, it also has obvious limitations because the shape and size of the window are fixed for all frequencies [
11]. The WT-based method can decompose a non-stationary signal into a set of basis functions consisting of contractions, expansions, and translations of a mother function. However, the selection of the key wavelet base and decomposition level significantly relies on the user’s experience [
12]. EMD is a new decomposition method [
13], which can self-adaptively decompose any signal into a set of intrinsic module functions (IMFs) that include different frequency characteristics. It is a significant advance in the analysis of non-stationary signals. However, EMD has a drawback of mode mixing. To overcome this drawback, Wu and Huang proposed the ensemble empirical mode decomposition (EEMD) method, which is a noise-assisted data analysis method by adding finite white noise to the investigated signal [
14]. Because of their ease of use and excellent performance for complex signals, EMD-based methods have been widely applied in fault diagnosis [
15,
16,
17,
18,
19,
20,
21,
22]. For example, Lei et al. applied the EEMD to the rub-impact fault diagnosis of a power generator and early rub-impact fault diagnosis of a heavy oil catalytic cracking machine [
15]. Jaouher et al. applied the EMD to diagnose bearing faults [
16]. Bustos et al. used the EMD for estimating the condition of the high-speed train running gear system [
20]. Park et al. applied EEMD to the transmission error measured by the encoders of the input and output shafts to classify the spall and crack faults of gear teeth [
21]. Buzzoni et al. applied EMD-based methods for the diagnosis of localized faults in multistage gearboxes, and they pointed out that EMD-based methods were particularly suitable for industrial applications since they were completely automatic [
22]. Considering the nonlinearity of the signal in real hoists and the industrial ease of use, EEMD is selected in this paper. To improve the diagnosis accuracy, the selection of the main IMFs is necessary since not all IMFs are sensitive to the faults [
23]. Some selection criteria have been proposed, such as the correlation coefficient criterion [
22], the kurtosis criterion [
24], and the similarity between the probability density function of the raw signal and that of each IMF [
23]. However, they were all designed for rigid systems, especially bearings.
The effectiveness of fault diagnosis largely depends upon the quality of extracted features [
25]. The earliest features are mainly statistical parameters such as kurtosis, root mean square, mean etc. However, they are often ineffective in a complex situation. Different running states result in different dynamic characteristics, which can be described from energy and entropy. Entropy is an effective measure to characterize the complexity of time series, and has attracted wide attention in recent years. Many entropy approaches have been proposed, such as sample entropy, approximate entropy, and permutation entropy (PE) [
26]. PE is a measure of the complexity in time series data based on the comparison of successive adjacent values which are mapped to ordinal patterns [
27]. Compared with others, PE has apparent advantages of simple calculation and robustness to noise, thus it has been widely applied. Berger et al. applied PE in the analysis of complex electroencephalography signals [
28]. Zanin et al. reviewed applications of PE in biomedical and econophysics fields [
29]. PE is also used in fault diagnosis. For example, Mitiche et al. applied PE in the classification of the electromagnetic discharge states in high-voltage power generation [
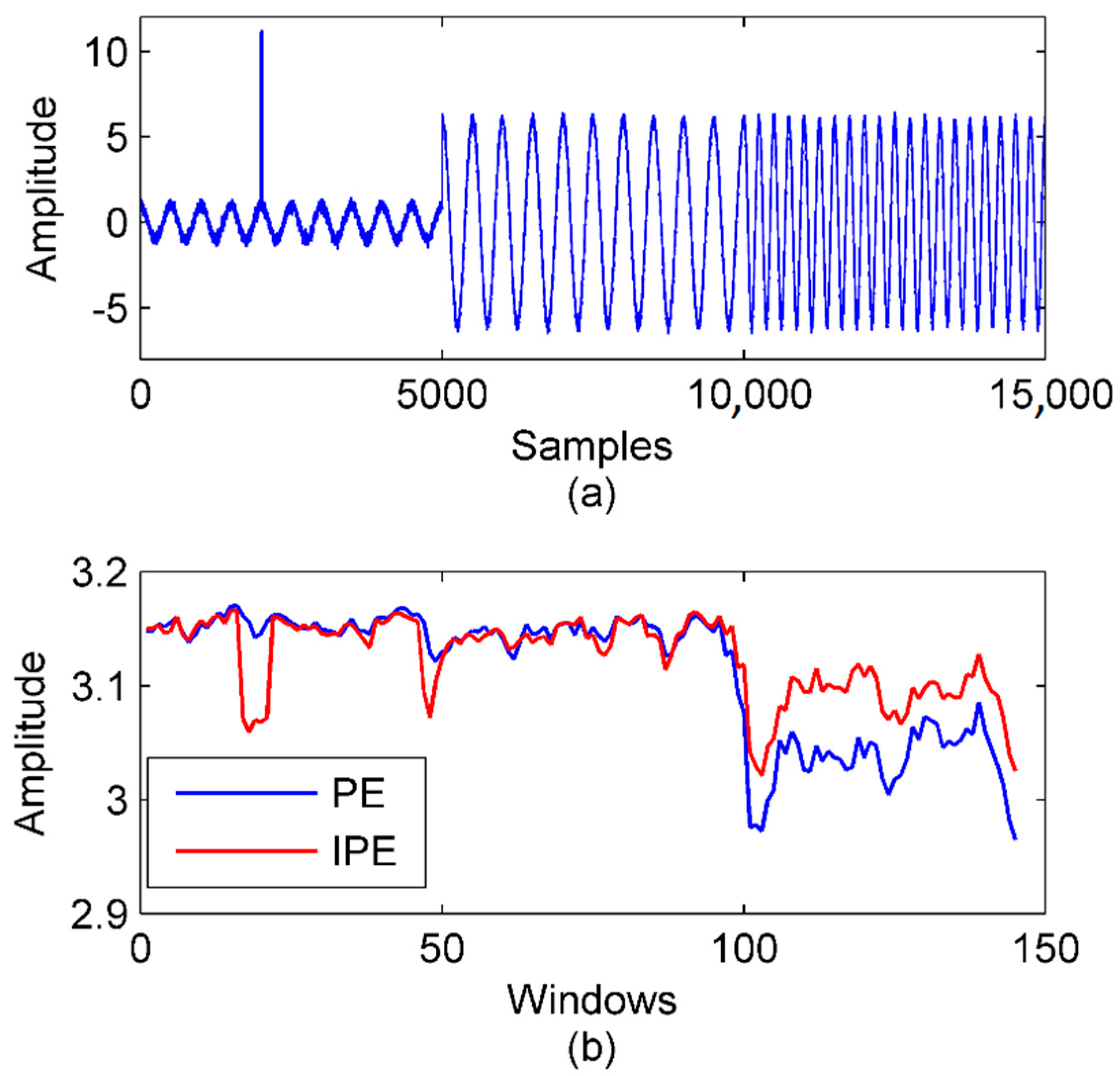
30]. However, the PE lost amplitude information of the original signal [
31]. In [
26], logistic models combining PE and sample entropy/ approximate entropy proved to be much more effective than PE in body temperature signal classification since PE contains only subpattern ordinal differences, while the combined model adds subpattern amplitude differences.
In pattern recognition, support vector machine (SVM), artificial neural network (ANN), and deep learning (DL) are attractive [
32,
33]. Liu et al. reviewed the applications of ANN, SVM, and DL in the fault diagnosis of rotating machinery and compared their advantages and disadvantages [
32]. ANN has a good approximation of complex nonlinear function; however, many parameters need to be adjusted, and a lot of training samples are required when using ANN. DL does not need the feature extraction; however, large numbers of training samples are required. SVM has a high classification accuracy. Further, it has the advantage of solving small-sample learning problems because it is based on structural risk minimization instead of experiential risk minimization [
34,
35]. The performance of ANN, SVM and k Nearest Neighbor (kNN) in misfire and valve clearance faults detection in the combustion engines was compared in [
36]. It showed that SVM outperformed kNN and ANN in terms of average accuracy, sensitivity, and specificity. Similar conclusion was also drawn in detecting bearing failures in wind-turbine gearboxes in [
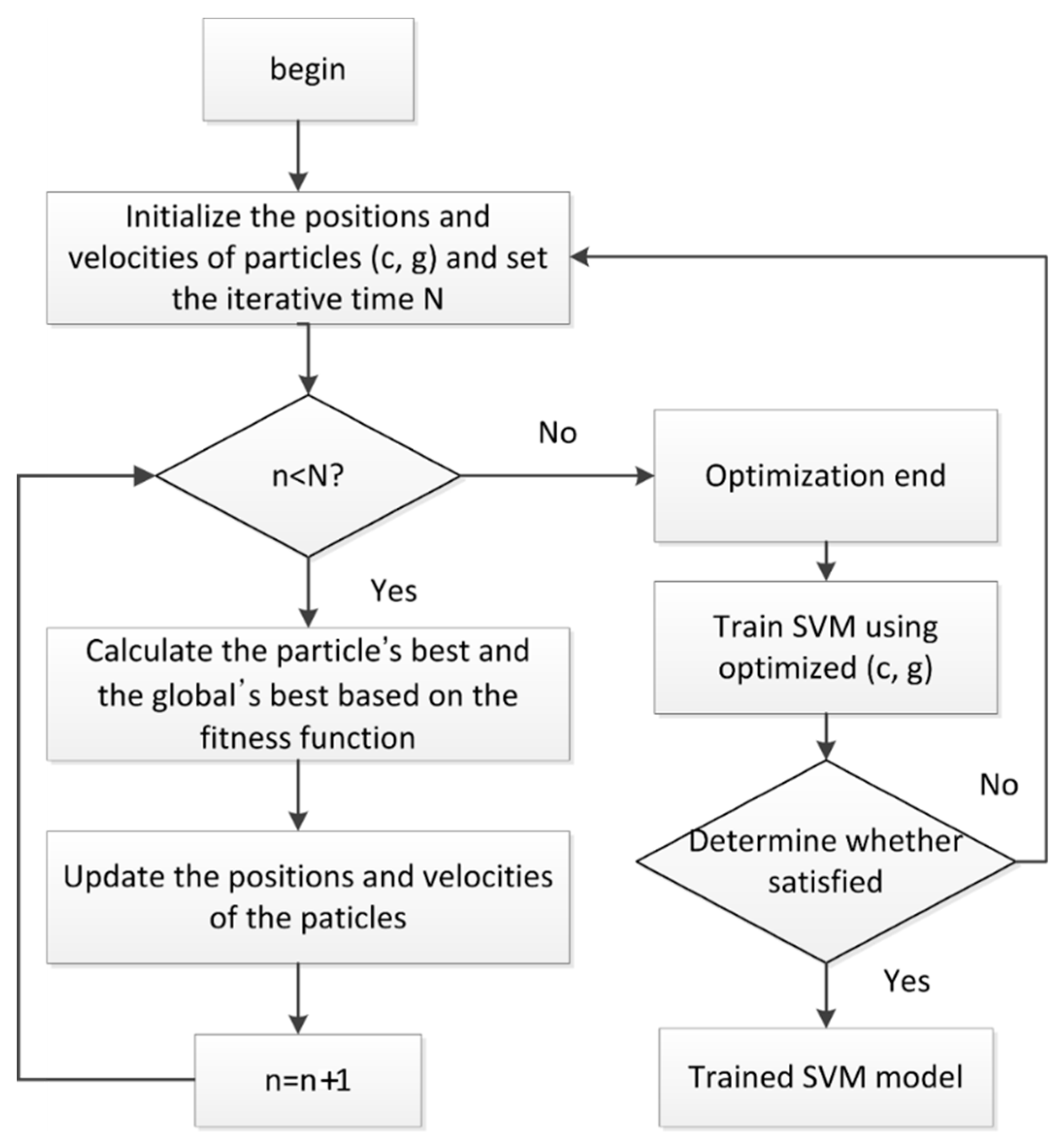
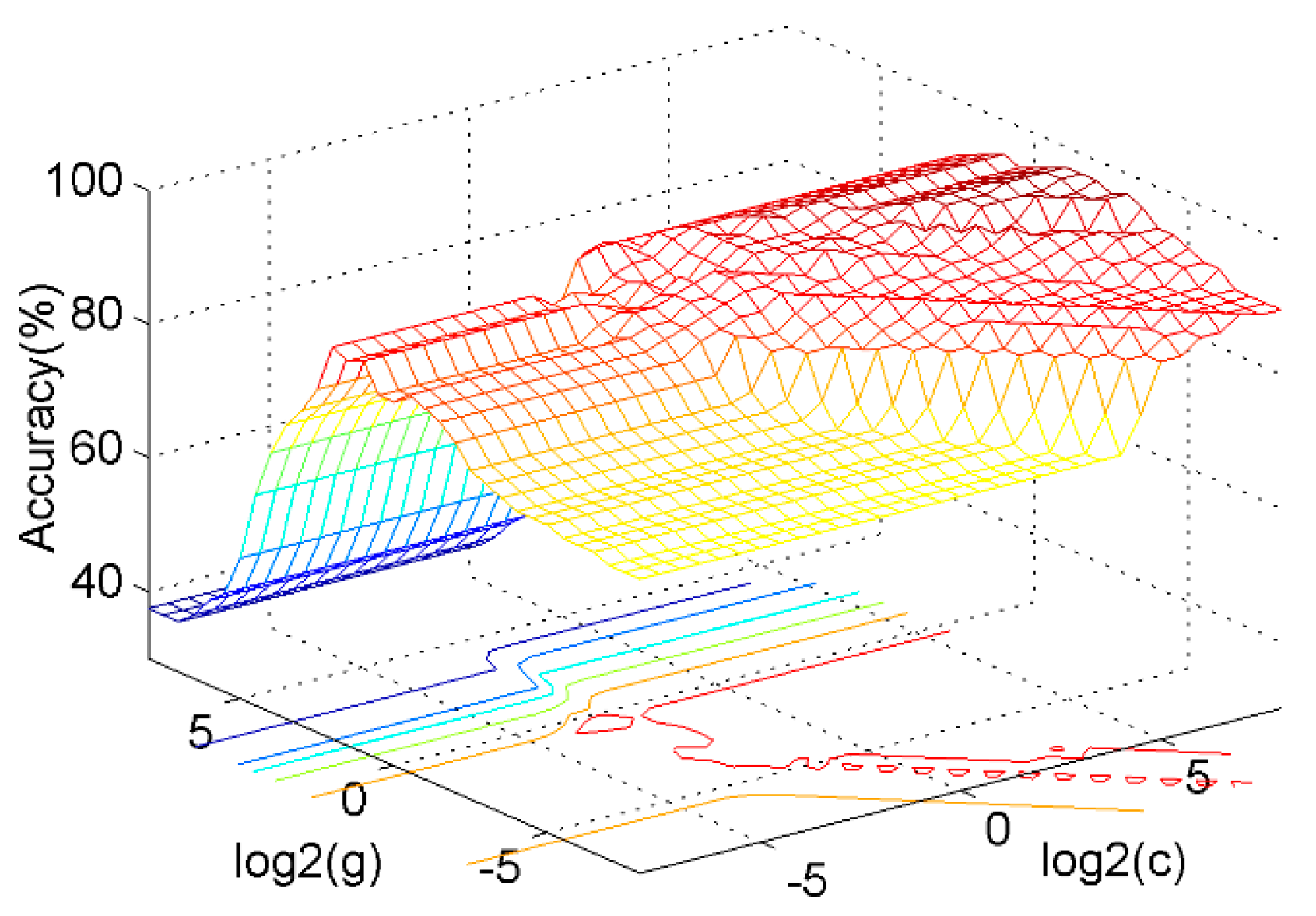
33]. Furthermore, the training and tuning time of SVM was found smaller than that of ANN since ANN has more parameters to tune. Considering the small simple problem and time consuming requirement in real hoisting systems, SVM is selected in this work. In an SVM with a Gaussian kernel, the penalty parameter
c and the kernel parameter
g have a great influence on the classification accuracy. However, the parameter selection lacks guidance [
37]. So, some optimization algorithms, such as the genetic algorithm (GA) [
38] and the particle swarm optimization (PSO) algorithm [
39] have been used to find the best parameters. GA was introduced in the mid-1970s by John Holland. It is inspired by the principles of genetics and evolution and mimics the reproduction behavior observed in biological populations. PSO was proposed by Kennedy and Eberhart in the mid-1990s. It is inspired by the ability of flocks of birds to adapt to their environment by implementing an “information sharing” approach. Venter compared the PSO and the GA and pointed out that the PSO had similar effectiveness as the GA but with significantly better computational efficiency by implementing statistical analysis and formal hypothesis testing [
40]. The effectiveness and high efficiency of the PSO make it applied in fault diagnosis [
41,
42]. For instance, in [
41], PSO was the key to finding the optimized weights of damage-sensitivitive feature vectors in fault detection of bearing systems.
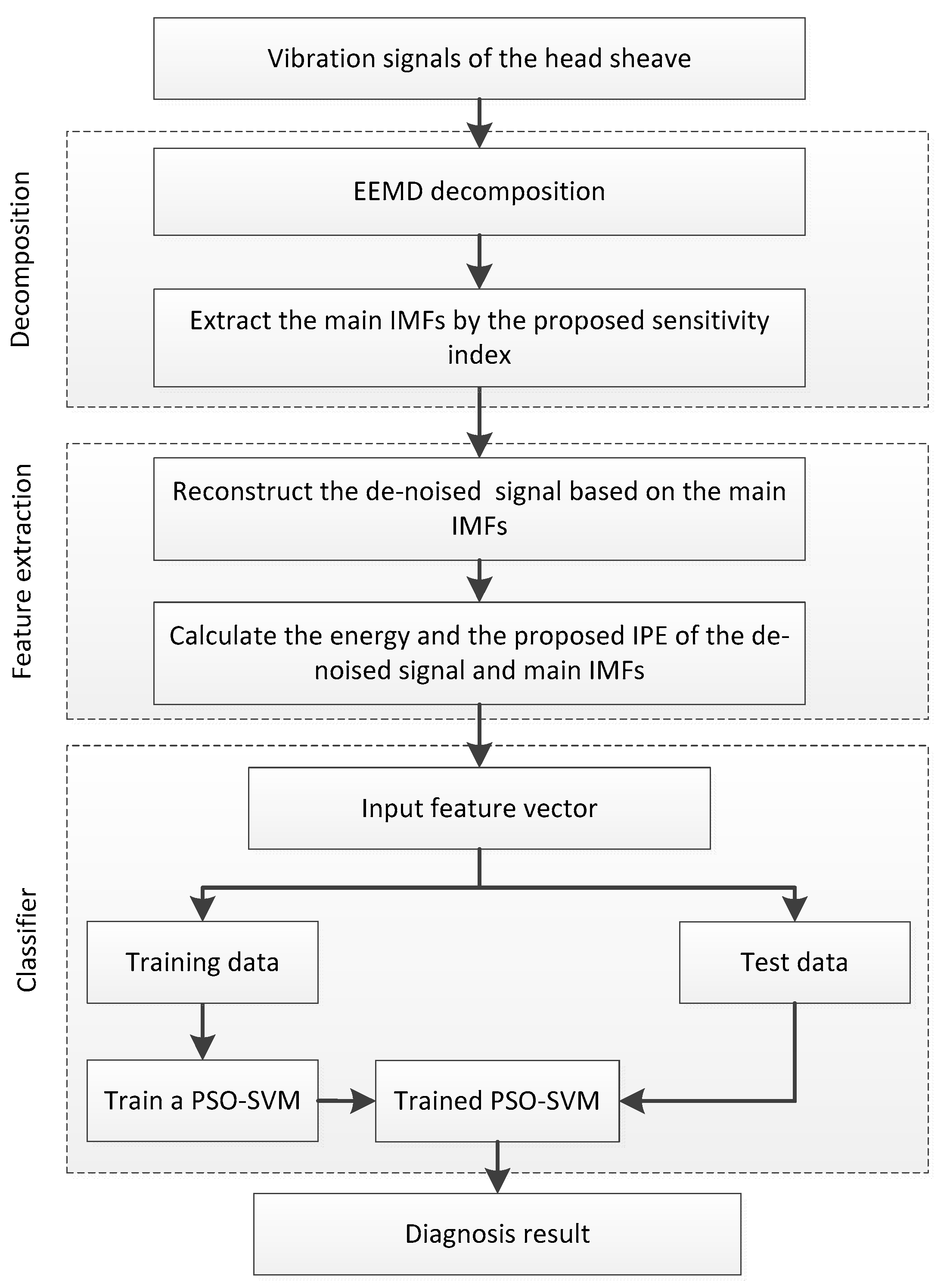
Inspired by previous studies, we propose a novel method to diagnose tension faults based on the vibration signal of the head sheave. The EEMD is used for decomposition and denoising. The improved permutation entropy (IPE) is proposed for feature extraction. The PSO-SVM is employed for classification. Experimental results demonstrated the effectiveness of the proposed method to classify tension faults in both single-rope and multi-rope hoists. The remainder of this article is organized as follows:
Section 2 introduces the theoretical basis and the proposed method.
Section 3 presents the experimental results and discussions, and
Section 4 provides the conclusion.
4. Conclusions
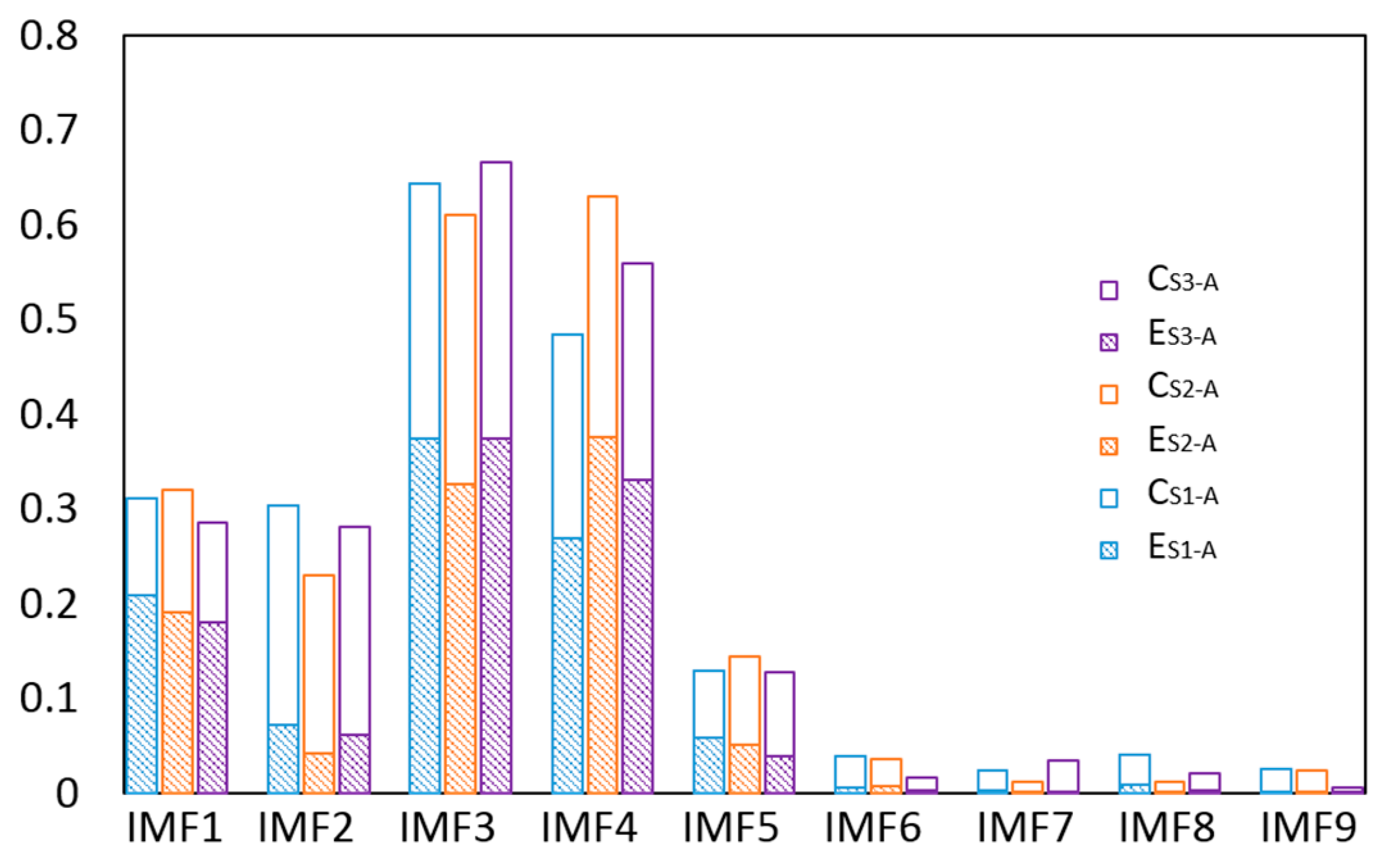
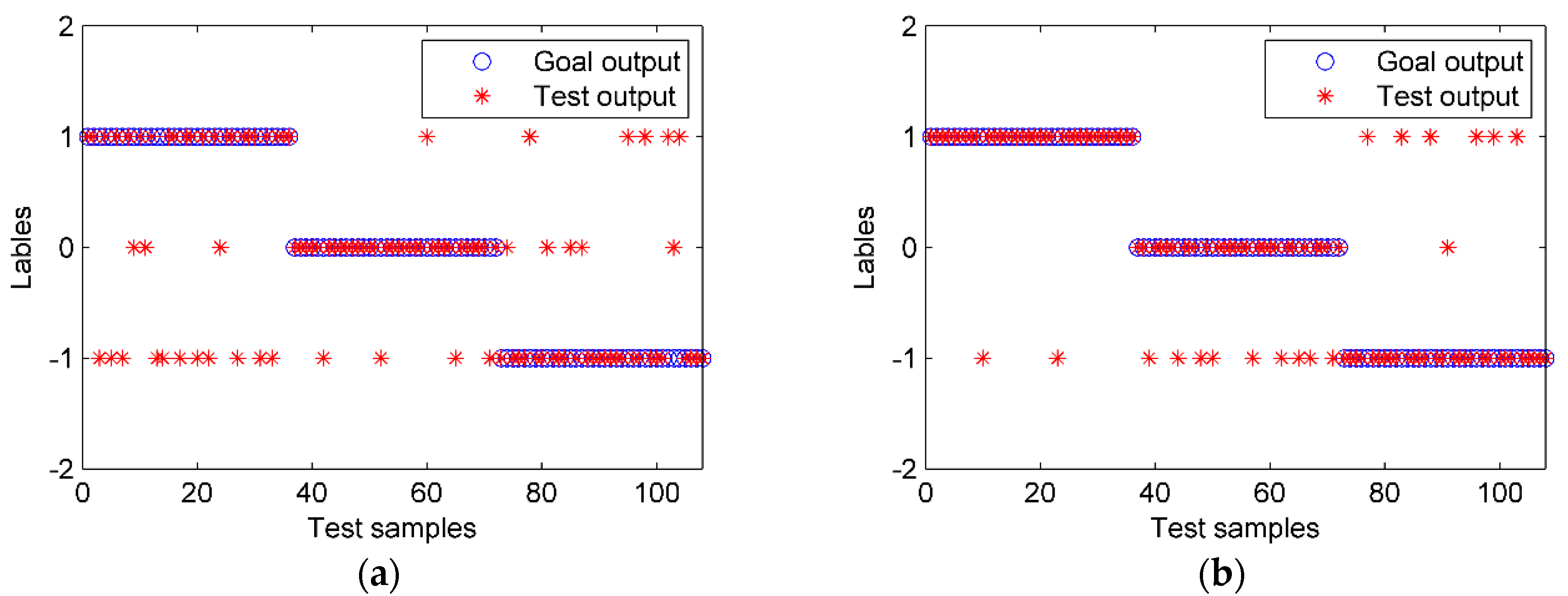
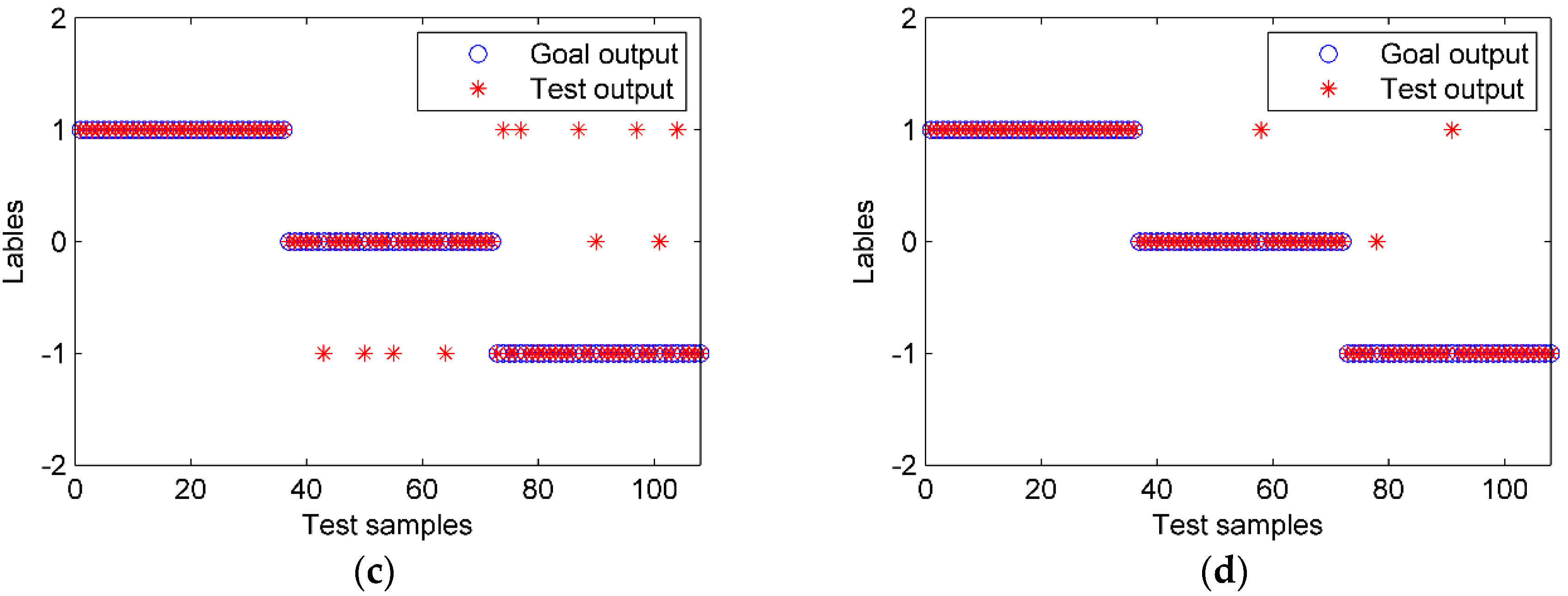
Rope tension faults may cause severe accidents in hoisting systems. In this paper, a novel tension fault diagnosis method based on the vibration signal of the head sheave was proposed. First, the signal was decomposed into several IMFs by the EEMD. Second, a sensitivity index was proposed to extract the main IMFs; then the de-noised signal was obtained by the sum of the main IMFs. Third, the IPE and the energy of the main IMFs and the denoised signal were calculated to create the feature vector. The IPE was proposed to improve the PE by adding the amplitude information of the signal, and it proved to be more sensitive than the PE in the simulations of impulse detecting and signal segmentation. Fourth, a PSO-SVM model was trained based on the vibration samples in different tension states. Lastly, the trained model was used to detect the tension faults in practice. Two experiments aiming at the classifications of the three states of a single rope and the five states of multiple ropes were performed. In the first experiment, the performances of different decomposition, feature extraction, and classification methods were independently compared to show the advantages of the proposed method. In the second experiment, the expansibility of the proposed method is verified. Results showed that the classification accuracies of the proposed method in the two experiments were 97.2% and 94.4%, respectively, which indicates that it can effectively detect rope tension faults such as overload, underload, and imbalance in hoisting systems.
This study provides a new perspective for detecting rope tension faults in winding systems. Compared with the conventional method based on force sensors, the proposed method has obvious advantages: First, vibration sensors are much easier to install and do not affect the safety of the original structure. Second, data transmission and power supply are also much more convenient. Therefore, the proposed method has great potential for engineering applications.
The essence of tension fault diagnosis is the classification of the tension level of each rope. In this study, the classification of three tension levels of a single rope was realized. However, rope tension should be described more accurately in engineering by a classification of more levels or a regression analysis, which will be the topic of our future study.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}