
A Transfer Learning Approach on the Optimization of Edge Detectors for Medical Images Using Particle Swarm Optimization


Abstract
:1. Introduction
Original Contribution
2. Materials and Methods
2.1. Edge Detection
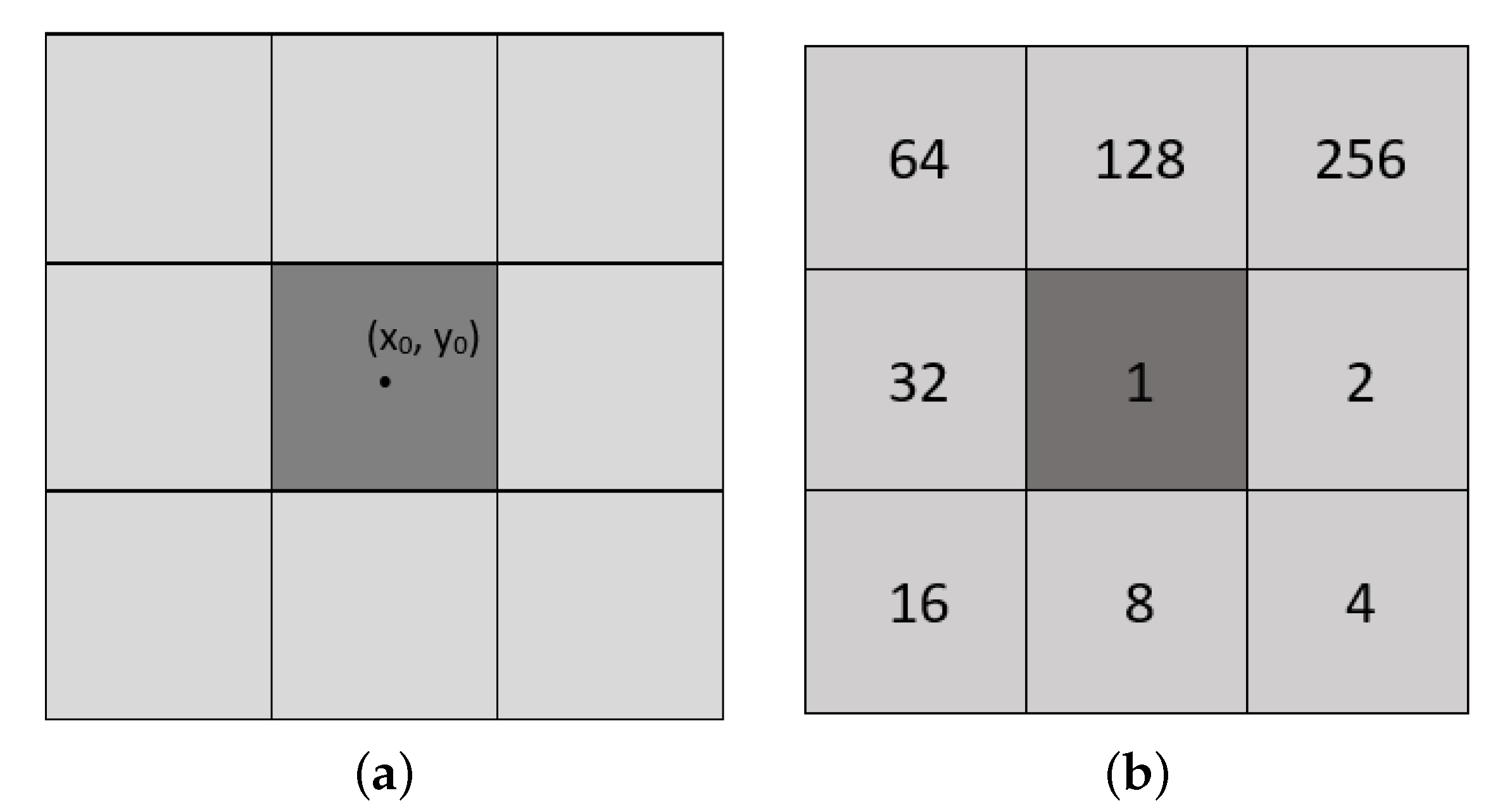
2.2. Cellular Automata
2.3. Cellular Automaton Model
2.4. Particle Swarm Optimization
2.5. PSO Optimizer
3. Results
3.1. Experimental Setup
3.1.1. Edge Detection Framework
- applying the CA rule with no additional processing—;
- applying the CA rule followed by a post-processing step—;
- pre-processing the input, followed by applying the CA rule and then the post-processing step—.
3.1.2. Optimizer Setup
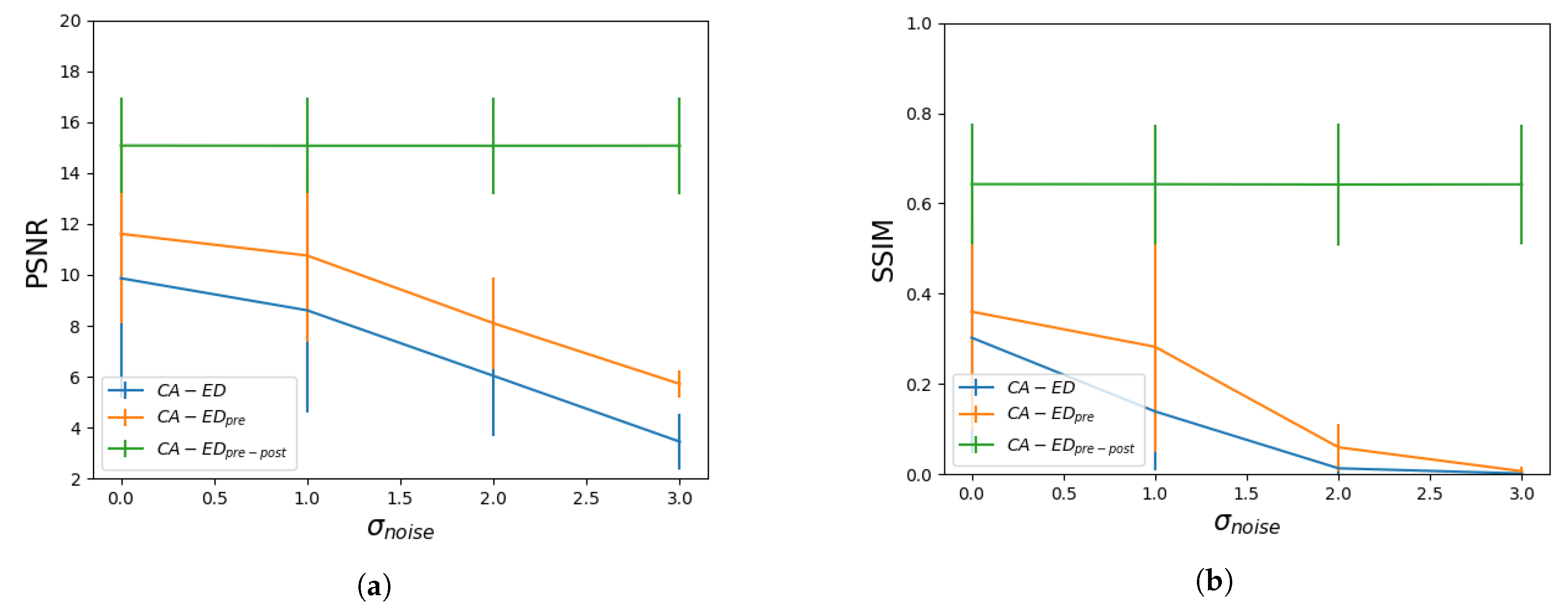
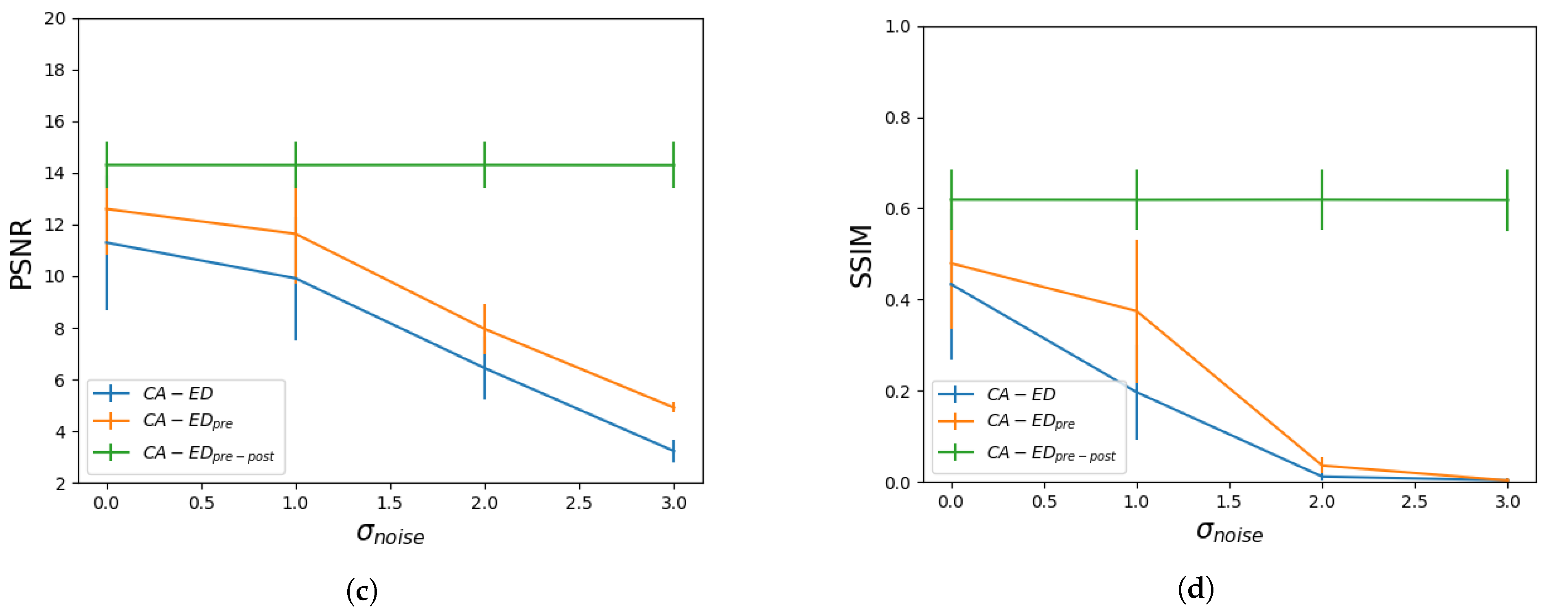
3.1.3. Metrics
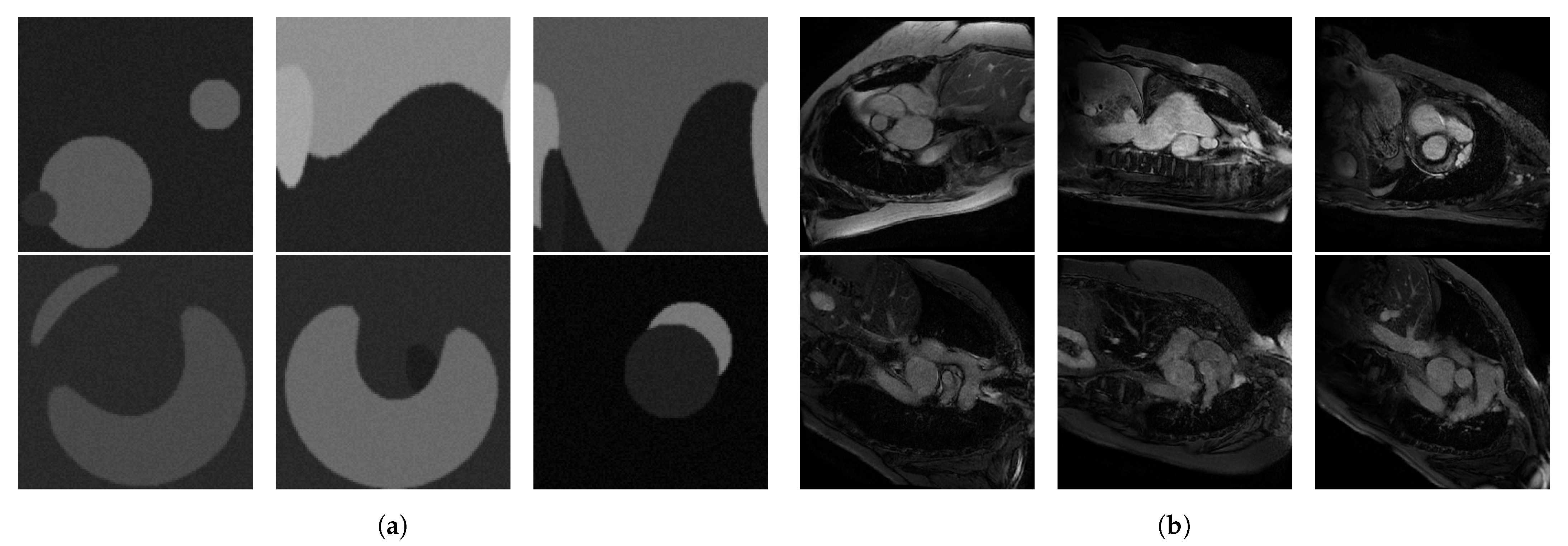
3.1.4. Dataset
3.2. Robustness Analysis
- an image from the optimization set is passed to the optimizer;
- the rule is optimized on this image for a set number of epochs;
- the next image is passed to the optimizer, and the global best is reset in order to avoid the particles getting stuck in local optima.
3.2.1. Comparing , and
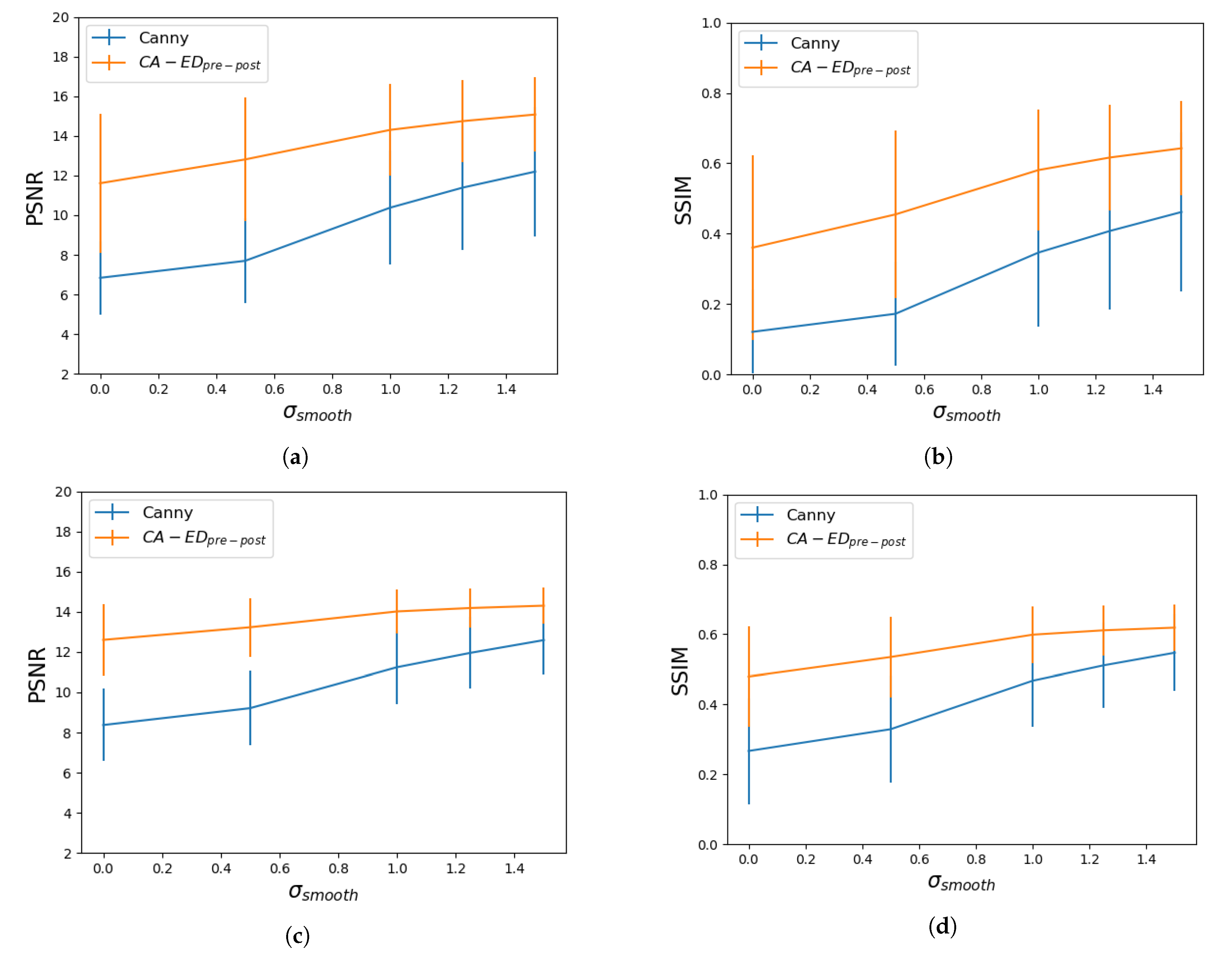
3.2.2. against the Canny Edge Detector
3.2.3. Optimization Analysis
- a fixed number of images from the optimization set are passed to the optimizer;
- the rule is optimized on the batch for a set number of epochs by averaging the fitness computed for the individual images;
- the next batch is passed to the optimizer, and the global best is reset to avoid the particles getting stuck in local optima.
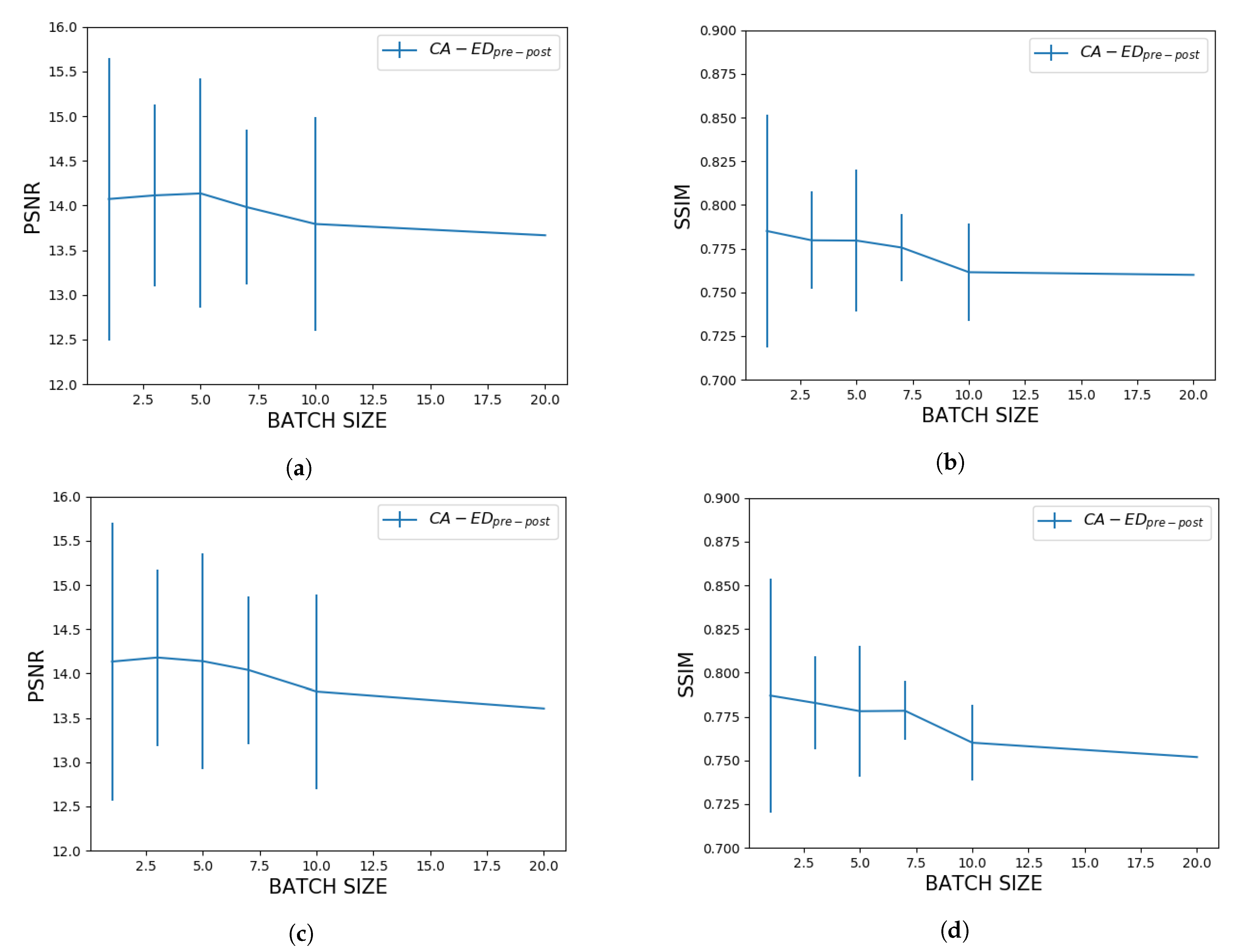
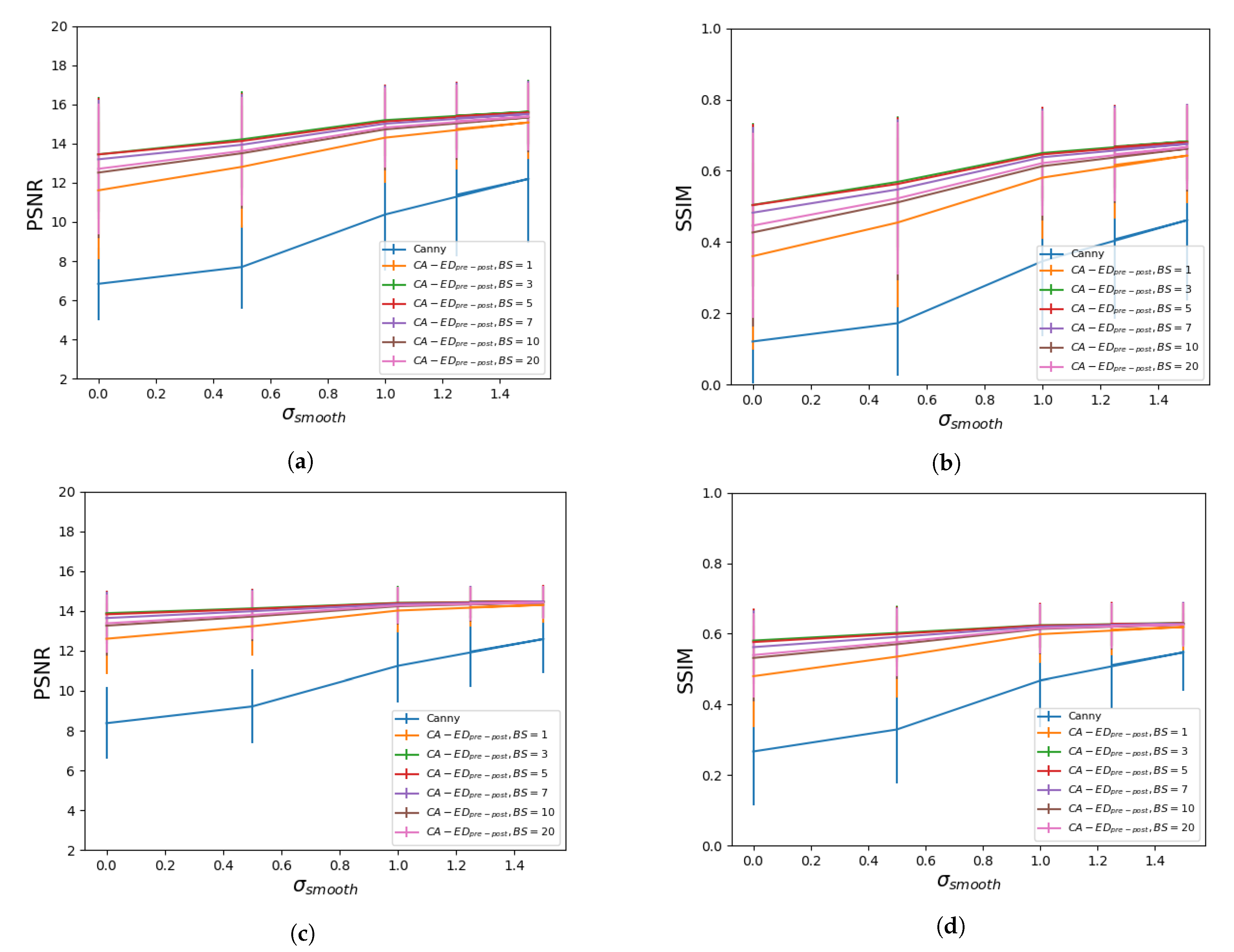
3.2.4. Impact of Batch Size over the Optimization Process
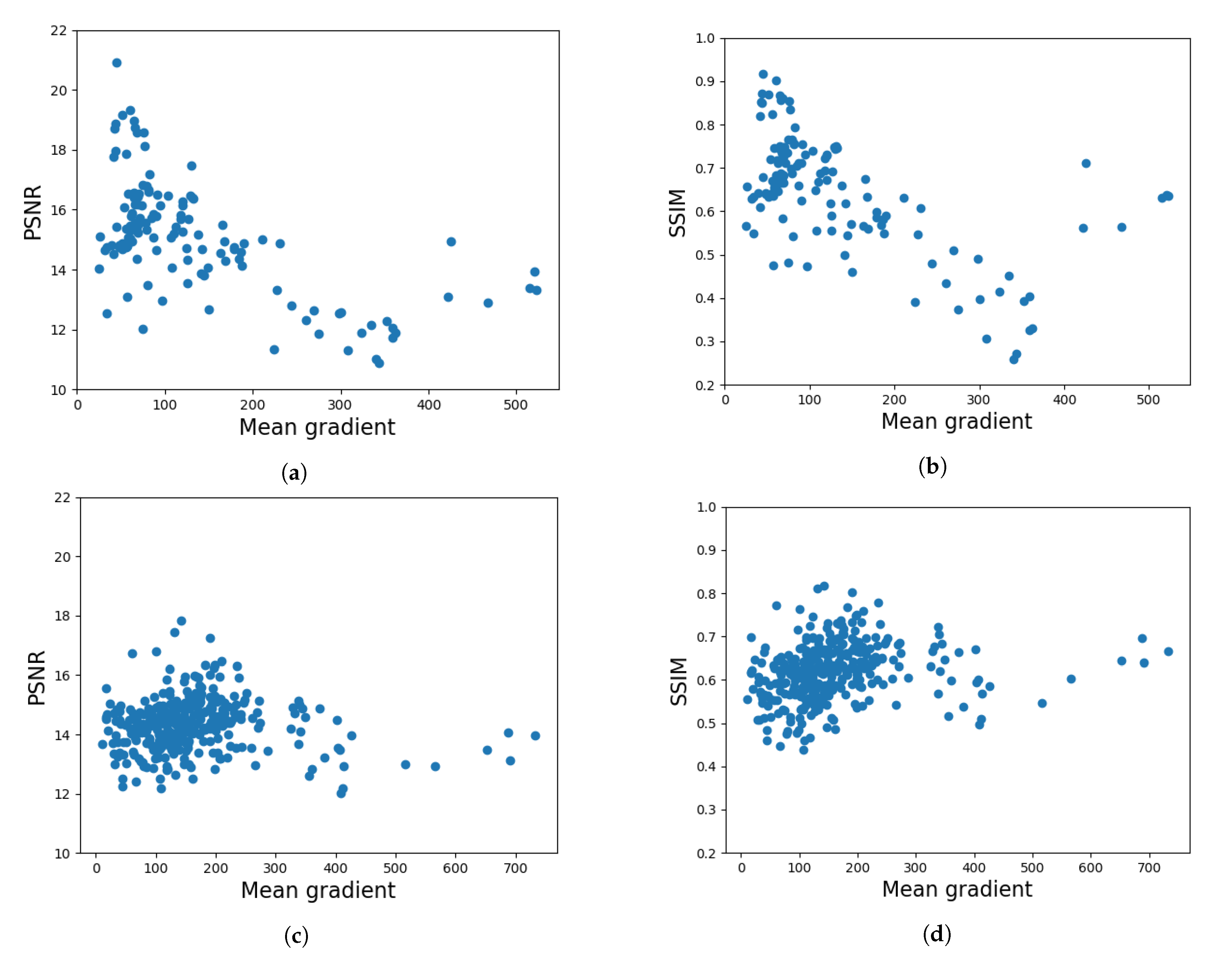
3.2.5. Evaluating the Difficulty of Edge Detection with Respect to Batch Size
4. Discussion
4.1. Robustness Analysis
4.1.1. Comparing , , and
4.1.2. against the Canny Edge Detector
4.2. Optimization Analysis
4.2.1. Impact of Batch Size over the Optimization Process
4.2.2. Evaluating the Difficulty of Edge Detection with Respect to Batch Size
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, R. Edge Detection Using Convolutional Neural Network; Springer: Cham, Switzerland, 2016; Volume 9719, pp. 12–20. [Google Scholar]
- Khan, A.R.; Choudhury, P.P.; Dihidar, K.; Mitra, S.; Sarkar, P. VLSI architecture of a cellular automata machine. Comput. Math. Appl. 1997, 33, 79–94. [Google Scholar] [CrossRef] [Green Version]
- Dioșan, L.; Andreica, A.; Enescu, A. The Use of Simple Cellular Automata in Image Processing. Stud. Univ. Babes-Bolyai Inform. 2017, 62, 5–16. [Google Scholar] [CrossRef] [Green Version]
- Schiff, J.L. Cellular Automata: A Discrete View of the World (Wiley Series in Discrete Mathematics & Optimization); John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Mohammed, J.; Nayak, D.R. An efficient edge detection technique by two dimensional rectangular cellular automata. In Proceedings of the International Conference on Information Communication and Embedded Systems (ICICES2014), Chennai, India, 27–28 February 2014. [Google Scholar]
- Angulo, K.; Gil, D.; Espitia, H. Method for Edges Detection in Digital Images through the Use of Cellular Automata; Springer: Cham, Switzerland, 2020; pp. 3–21. [Google Scholar]
- Mărginean, R.; Andreica, A.; Dioşan, L.; Bálint, Z. Butterfly Effect in Chaotic Image Segmentation. Entropy 2020, 22, 1028. [Google Scholar] [CrossRef]
- Amrogowicz, S.; Zhao, Y.; Zhao, Y. An edge detection method using outer Totalistic Cellular Automata. Neurocomputing 2016, 214, 643–653. [Google Scholar] [CrossRef] [Green Version]
- Mohammad, H.M.; Sadeghi, S.; Rezvanian, A.; Meybodi, M.R. Cellular edge detection: Combining cellular automata and cellular learning automata. Int. J. Electron. Commun. 2015, 69, 1282–1290. [Google Scholar]
- Uguz, S.; Sahin, U.; Sahin, F. Edge detection with fuzzy cellular automata transition function optimized by PSO. Comput. Electr. Eng. 2015, 43, 180–192. [Google Scholar]
- Gonzalez, C.I.; Melin, P.; Castro, J.R.; Castillo, O.; Mendoza, O. Optimization of interval type-2 fuzzy systems for image edge detection. Appl. Soft Comput. 2016, 47, 631–643. [Google Scholar] [CrossRef]
- Olivas, F.; Valdez, F.; Castillo, O.; Melin, P. Dynamic Parameter Adaptation in Particle Swarm Optimization Using Interval Type-2 Fuzzy Logic. Soft Comput. 2016, 20, 1057–1070. [Google Scholar] [CrossRef]
- Vikhar, P.A. Evolutionary algorithms: A critical review and its future prospects. In Proceedings of the 2016 International Conference on Global Trends in Signal Processing, Information Computing and Communication (ICGTSPICC), Jalgaon, India, 22–24 December 2016; pp. 261–265. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Weikert, D.; Mai, S.; Mostaghim, S. Particle Swarm Contour Search Algorithm. Entropy 2020, 22, 407. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dumitru, D.; Andreica, A.; Dioşan, L.; Balint, Z. Evolutionary Curriculum Learning Approach for Transferable Cellular Automata Rule Optimization. In Proceedings of the 2020 Genetic and Evolutionary Computation Conference Companion, Cancun, Mexico, 8–12 July 2020. [Google Scholar]
- Dumitru, D.; Andreica, A.; Dioşan, L.; Bálint, Z. Robustness analysis of transferable cellular automata rules optimized for edge detection. Procedia Comput. Sci. 2020, 176, 713–722. [Google Scholar] [CrossRef]
- Hersey, I. Textures: A Photographic Album for Artists and Designers by Phil Brodatz. Leonardo 1968, 1, 91–92. [Google Scholar] [CrossRef]
- Vilalta, R.; Giraud-Carrier, C.; Brazdil, P.; Soares, C. Inductive Transfer. In Encyclopedia of Machine Learning; Sammut, C., Webb, G.I., Eds.; Springer US: Boston, MA, USA, 2010; pp. 545–548. [Google Scholar]
- Litjens, G.; Ciompi, F.; Wolterink, J.M.; de Vos, B.D.; Leiner, T.; Teuwen, J.; Išgum, I. State-of-the-Art Deep Learning in Cardiovascular Image Analysis. JACC Cardiovasc. Imaging 2019, 12, 1549–1565. [Google Scholar] [CrossRef] [PubMed]
- Jain, R.; Kasturi, R.; Schunck, B.G. Edge Detection; Machine Vision; McGraw-Hill: New York, NY, USA, 1995; Volume 5, pp. 140–185. [Google Scholar]
- Ziou, D.; Tabbone, S. Edge Detection Techniques-An Overview. Pattern Recognit. Image Anal. C 1998, 8, 537–559. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 679–698. [Google Scholar] [CrossRef]
- Neumann, J.V. Theory of Self-Reproducing Automata; Burks, A.W., Ed.; University of Illinois Press: Urbana, IL, USA, 1966. [Google Scholar]
- Kari, J. Theory of Cellular Automata: A Survey. Theor. Comput. Sci. 2005, 334, 3–33. [Google Scholar] [CrossRef] [Green Version]
- Dice, L.R. Measures of the Amount of Ecologic Association Between Species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef] [PubMed]
- Xess, M.; Agnes, S.A. Analysis of Image Segmentation Methods Based on Performance Evaluation Parameters. Int. J. Comput. Eng. Res. 2014, 4, 68–75. [Google Scholar]
- Zhou, W.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar]
- Sobel, I. An Isotropic 3x3 Image Gradient Operator. Present. Stanf. A.I. Proj. 1968, 2014, 2. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pearson Correlation (Low Intensity Set) | Pearson Correlation (High Intensity Set) | |
|---|---|---|
| PSNR | −0.605 | −0.049 |
| SSIM | −0.580 | 0.191 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dumitru, D.; Dioșan, L.; Andreica, A.; Bálint, Z. A Transfer Learning Approach on the Optimization of Edge Detectors for Medical Images Using Particle Swarm Optimization. Entropy 2021, 23, 414. https://0-doi-org.brum.beds.ac.uk/10.3390/e23040414
Dumitru D, Dioșan L, Andreica A, Bálint Z. A Transfer Learning Approach on the Optimization of Edge Detectors for Medical Images Using Particle Swarm Optimization. Entropy. 2021; 23(4):414. https://0-doi-org.brum.beds.ac.uk/10.3390/e23040414
Chicago/Turabian StyleDumitru, Delia, Laura Dioșan, Anca Andreica, and Zoltán Bálint. 2021. "A Transfer Learning Approach on the Optimization of Edge Detectors for Medical Images Using Particle Swarm Optimization" Entropy 23, no. 4: 414. https://0-doi-org.brum.beds.ac.uk/10.3390/e23040414