
An Effective Synchronization Approach to Stability Analysis for Chaotic Generalized Lotka–Volterra Biological Models Using Active and Parameter Identification Methods



Abstract
:1. Introduction
2. Problem Formulation
3. Synchronization Methodology
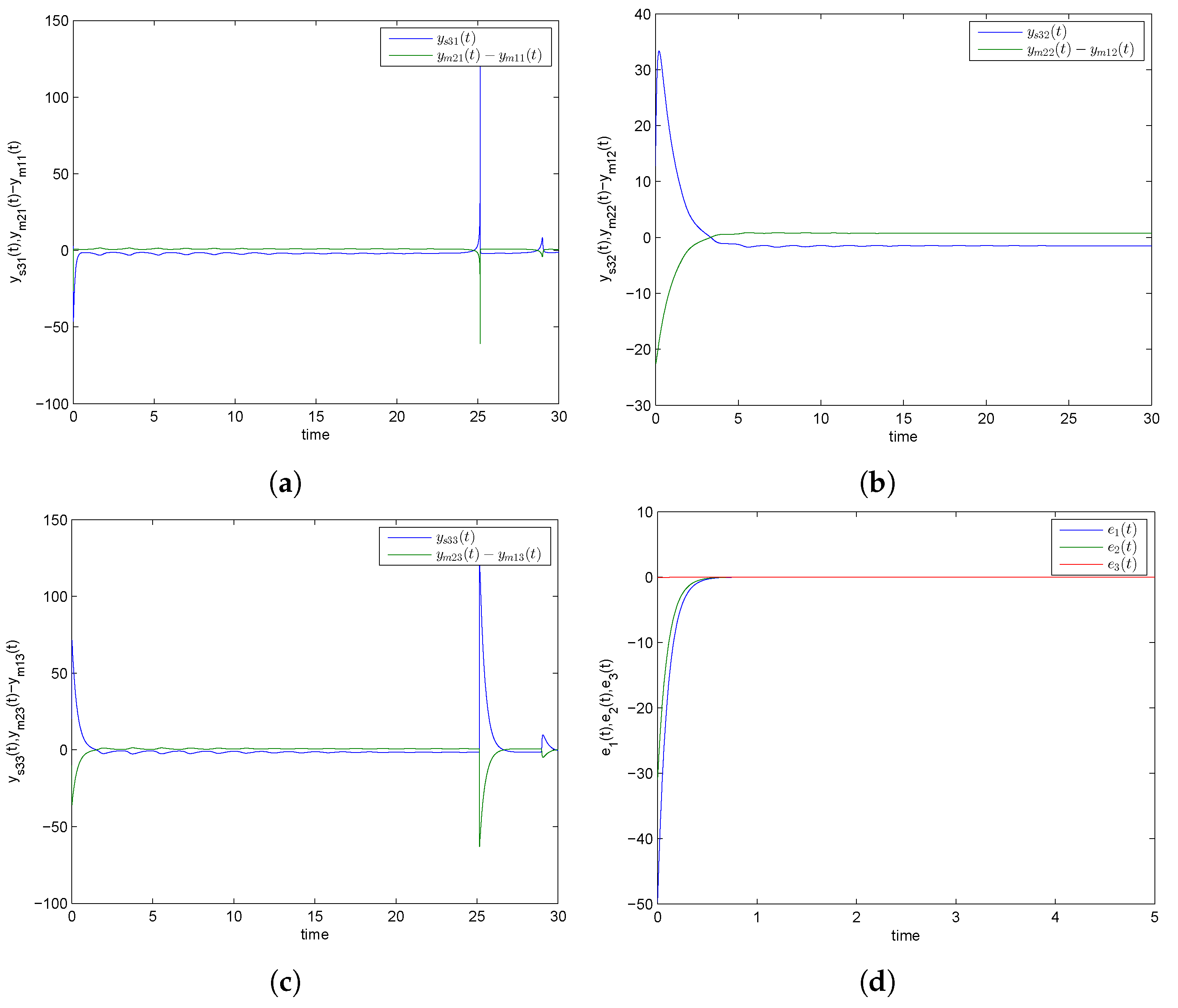
4. Combination Difference Projective Synchronization (CDPS) for Identical Chaotic GLV Systems via Active Control Method (ACM)
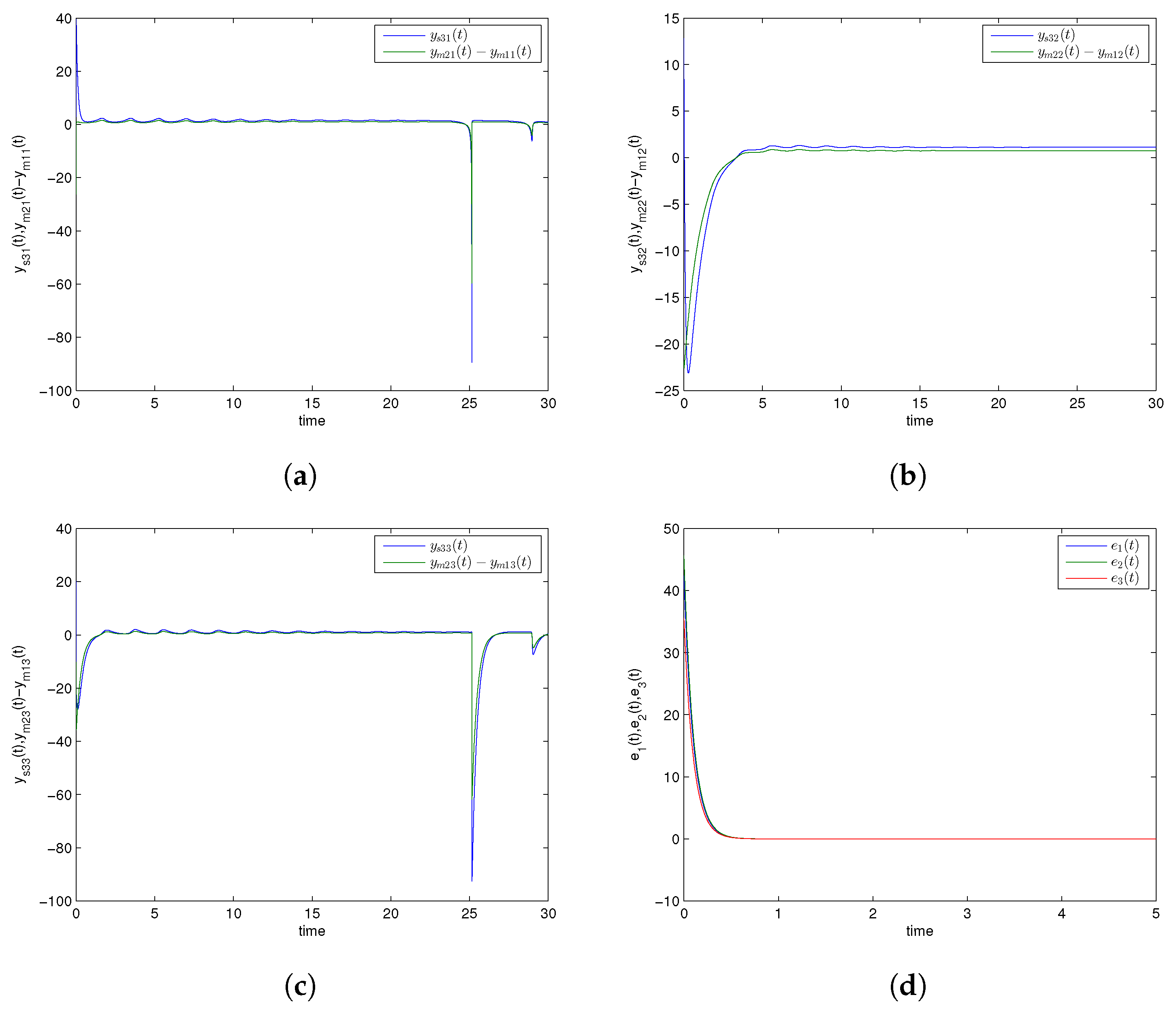
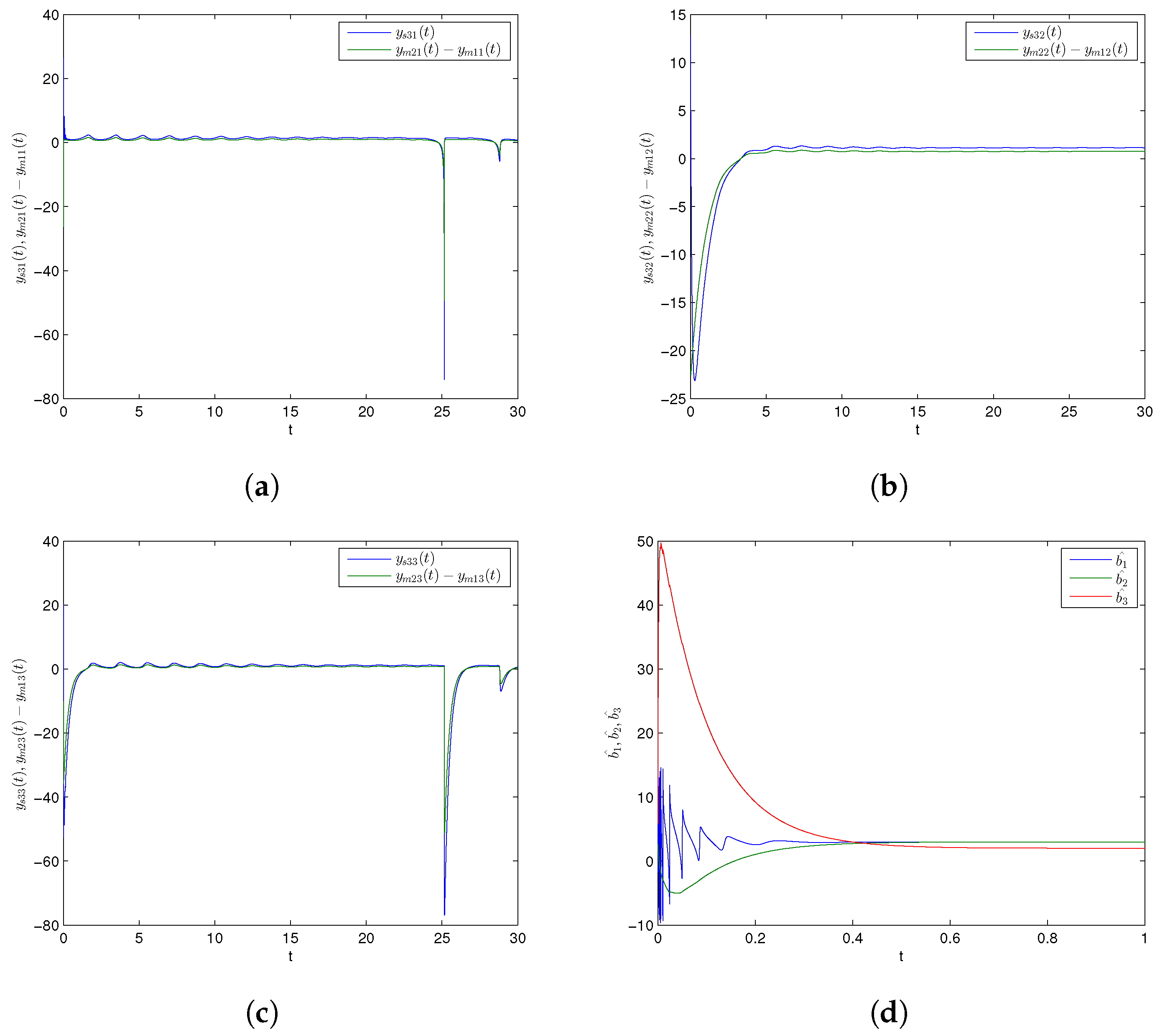
5. Combination Difference Projective Synchronization (CDPS) in Identical Chaotic GLV Systems Using Parameter Identification Method (PIM)
5.1. Numerical Simulations and Results
5.2. Comparative Analysis
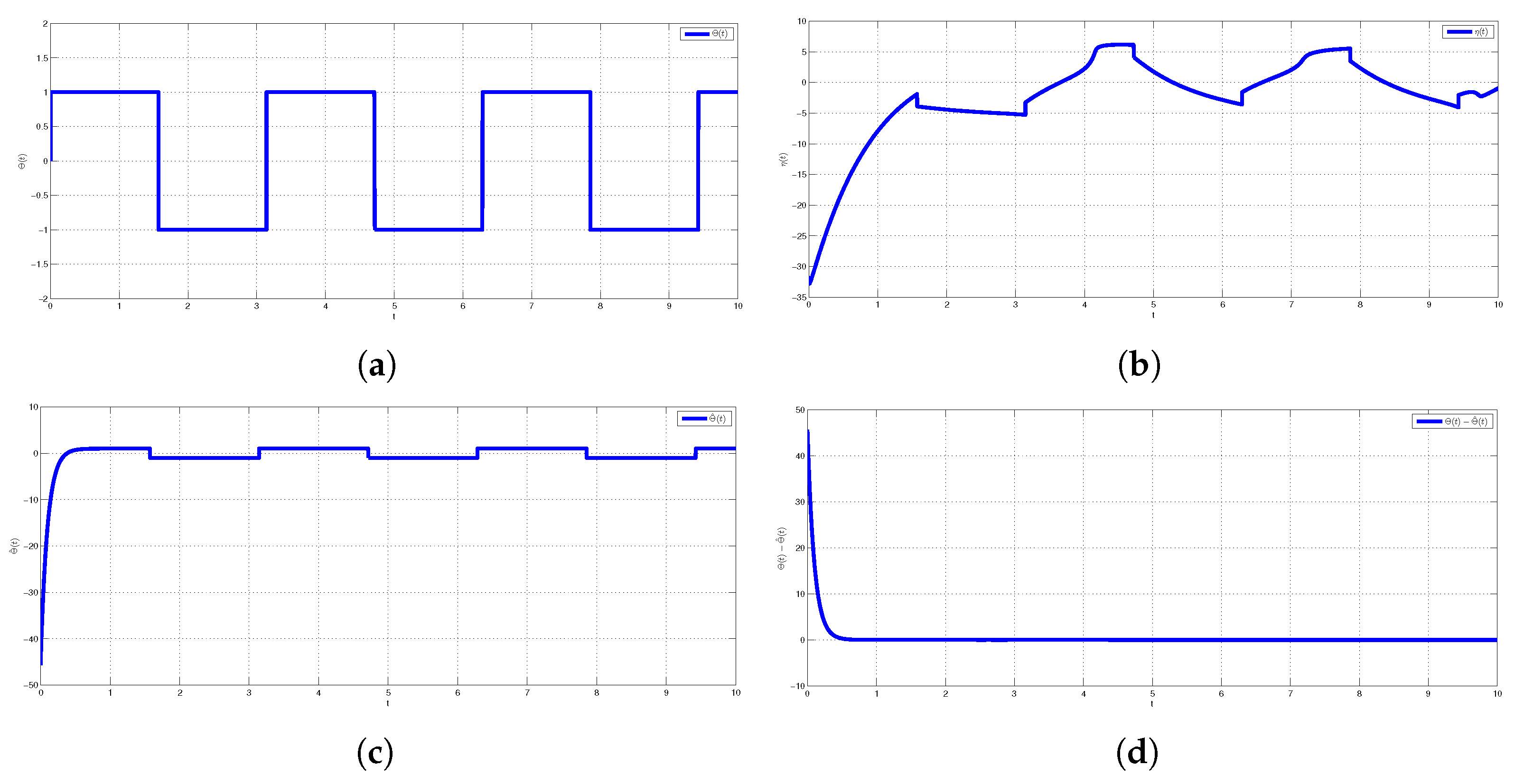
6. Application of Combination Difference Projective Synchronization in Secure Communication
7. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lotka, A.J. Elements of physical biology. In Science Progress in the Twentieth Century (1919–1933); Sage Publications, Ltd.: London, UK, 1926; Volume 21, pp. 341–343. [Google Scholar]
- Scudo, F.M. Vito Volterra and theoretical ecology. Theor. Popul. Biol. 1971, 2, 1–23. [Google Scholar] [CrossRef]
- Goel, N.S.; Maitra, S.C.; Montroll, E.W. On the Volterra and other nonlinear models of interacting populations. Rev. Mod. Phys. 1971, 43, 231. [Google Scholar] [CrossRef]
- Antoniou, P.; Pitsillides, A. A bio-inspired approach for streaming applications in wireless sensor networks based on the Lotka–Volterra competition model. Comput. Commun. 2010, 33, 2039–2047. [Google Scholar] [CrossRef]
- Gatabazi, P.; Mba, J.; Pindza, E. Modeling cryptocurrencies transaction counts using variable-order Fractional Grey Lotka-Volterra dynamical system. Chaos Solitons Fractals 2019, 127, 283–290. [Google Scholar] [CrossRef]
- Gatabazi, P.; Mba, J.; Pindza, E.; Labuschagne, C. Grey Lotka–Volterra models with application to cryptocurrencies adoption. Chaos Solitons Fractals 2019, 122, 47–57. [Google Scholar] [CrossRef]
- Gavin, C.; Pokrovskii, A.; Prentice, M.; Sobolev, V. Dynamics of a Lotka-Volterra type model with applications to marine phage population dynamics. J. Phys. Conf. Ser. 2006, 55, 80. [Google Scholar] [CrossRef]
- Tonnang, H.E.; Nedorezov, L.V.; Ochanda, H.; Owino, J.; Löhr, B. Assessing the impact of biological control of Plutella xylostella through the application of Lotka–Volterra model. Ecol. Model. 2009, 220, 60–70. [Google Scholar] [CrossRef]
- Tsai, B.H.; Chang, C.J.; Chang, C.H. Elucidating the consumption and CO2 emissions of fossil fuels and low-carbon energy in the United States using Lotka–Volterra models. Energy 2016, 100, 416–424. [Google Scholar] [CrossRef]
- Perhar, G.; Kelly, N.E.; Ni, F.J.; Simpson, M.J.; Simpson, A.J.; Arhonditsis, G.B. Using daphnia physiology to drive food web dynamics: A theoretical revisit of Lotka-Volterra models. Ecol. Inform. 2016, 35, 29–42. [Google Scholar] [CrossRef]
- Reichenbach, T.; Mobilia, M.; Frey, E. Coexistence versus extinction in the stochastic cyclic Lotka-Volterra model. Phys. Rev. E 2006, 74, 051907. [Google Scholar] [CrossRef] [Green Version]
- Silva-Dias, L.; López-Castillo, A. Spontaneous symmetry breaking of population: Stochastic Lotka–Volterra model for competition among two similar preys and predators. Math. Biosci. 2018, 300, 36–46. [Google Scholar] [CrossRef]
- Hening, A.; Nguyen, D.H. Stochastic Lotka–Volterra food chains. J. Math. Biol. 2018, 77, 135–163. [Google Scholar] [CrossRef] [Green Version]
- Vaidyanathan, S. Adaptive biological control of generalized Lotka-Volterra three-species biological system. Int. J. Pharmtech Res. 2015, 8, 622–631. [Google Scholar]
- Vaidyanathan, S. Hybrid synchronization of the generalized Lotka-Volterra three-species biological systems via adaptive control. Int. J. PharmTech Res. 2016, 9, 179–192. [Google Scholar]
- Khan, A.; Nigar, U. Adaptive hybrid complex projective combination–combination synchronization in non-identical hyperchaotic complex systems. Int. J. Dyn. Control 2019, 7, 1404–1418. [Google Scholar] [CrossRef]
- Khan, A.; Chaudhary, H. Hybrid projective combination–combination synchronization in non-identical hyperchaotic systems using adaptive control. Arab. J. Math. 2020, 9, 597–611. [Google Scholar] [CrossRef] [Green Version]
- Arneodo, A.; Coullet, P.; Tresser, C. Occurence of strange attractors in three-dimensional Volterra equations. Phys. Lett. A 1980, 79, 259–263. [Google Scholar] [CrossRef]
- Samardzija, N.; Greller, L.D. Explosive route to chaos through a fractal torus in a generalized Lotka-Volterra model. Bull. Math. Biol. 1988, 50, 465–491. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef]
- Singh, A.K.; Yadav, V.K.; Das, S. Synchronization between fractional order complex chaotic systems. Int. J. Dyn. Control 2017, 5, 756–770. [Google Scholar] [CrossRef]
- Li, H.; Liao, X.; Luo, M. A novel non-equilibrium fractional-order chaotic system and its complete synchronization by circuit implementation. Nonlinear Dyn. 2012, 68, 137–149. [Google Scholar] [CrossRef]
- Sudheer, K.S.; Sabir, M. Hybrid synchronization of hyperchaotic Lu system. Pramana 2009, 73, 781. [Google Scholar] [CrossRef]
- Khan, T.; Chaudhary, H. Estimation and Identifiability of Parameters for Generalized Lotka-Volterra Biological Systems Using Adaptive Controlled Combination Difference Anti-Synchronization. Differ. Equ. Dyn. Syst. 2020, 28, 515–526. [Google Scholar] [CrossRef]
- Guo, R.; Qi, Y. Partial anti-synchronization in a class of chaotic and hyper-chaotic systems. IEEE Access 2021, 9, 46303–46312. [Google Scholar] [CrossRef]
- Guo, R. Projective synchronization of a class of chaotic systems by dynamic feedback control method. Nonlinear Dyn. 2017, 90, 53–64. [Google Scholar] [CrossRef]
- Khan, A.; Chaudhary, H. Stability Analysis of Chaotic New Hamiltonian System Based on HÉnon-Heiles Model using Adaptive Controlled Hybrid Projective Synchronization. Int. J. Appl. Math. 2021, 34, 803. [Google Scholar] [CrossRef]
- Chaudhary, H.; Sajid, M. Controlling hyperchaos in non-identical systems using active controlled hybrid projective combination-combination synchronization technique. J. Math. Comput. Sci. 2021, 12, 30. [Google Scholar]
- Chaudhary, H.; Khan, A.; Sajid, M. An investigation on microscopic chaos controlling of identical chemical reactor system via adaptive controlled hybrid projective synchronization. Eur. Phys. J. Spec. Top. 2021, 1–11. [Google Scholar] [CrossRef]
- Zhou, P.; Zhu, W. Function projective synchronization for fractional-order chaotic systems. Nonlinear Anal. Real World Appl. 2011, 12, 811–816. [Google Scholar] [CrossRef]
- Ma, J.; Mi, L.; Zhou, P.; Xu, Y.; Hayat, T. Phase synchronization between two neurons induced by coupling of electromagnetic field. Appl. Math. Comput. 2017, 307, 321–328. [Google Scholar] [CrossRef]
- Khan, A.; Nigar, U. Combination projective synchronization in fractional-order chaotic system with disturbance and uncertainty. Int. J. Appl. Comput. Math. 2020, 6, 1–22. [Google Scholar] [CrossRef]
- Li, C.; Liao, X. Complete and lag synchronization of hyperchaotic systems using small impulses. Chaos Solitons Fractals 2004, 22, 857–867. [Google Scholar] [CrossRef]
- Li, G.H. Modified projective synchronization of chaotic system. Chaos Solitons Fractals 2007, 32, 1786–1790. [Google Scholar] [CrossRef]
- Jahanzaib, L.S.; Trikha, P.; Chaudhary, H.; Haider, S. Compound synchronization using disturbance observer based adaptive sliding mode control technique. J. Math. Comput. Sci. 2020, 10, 1463–1480. [Google Scholar]
- Yadav, V.K.; Prasad, G.; Srivastava, M.; Das, S. Triple Compound Synchronization Among Eight Chaotic Systems with External Disturbances via Nonlinear Approach. Differ. Equ. Dyn. Syst. 2019, 1–24. [Google Scholar] [CrossRef]
- Khan, T.; Chaudhary, H. An investigation on hybrid projective combination difference synchronization scheme between chaotic prey-predator systems via active control method. Poincare J. Anal. Appl. 2020, 7, 211–225. [Google Scholar] [CrossRef]
- Khan, A.; Nigar, U. Modulus Synchronization in Non-identical Hyperchaotic Complex Systems and Hyperchaotic Real System Using Adaptive Control. J. Control Autom. Electr. Syst. 2021, 32, 291–308. [Google Scholar] [CrossRef]
- Khan, A.; Nigar, U. Adaptive Modulus Hybrid Projective Combination Synchronization of Time-Delay Chaotic Systems with Uncertainty and Disturbance and its Application in Secure Communication. Int. J. Appl. Comput. Math. 2021, 7, 1–26. [Google Scholar] [CrossRef]
- Feketa, P.; Schaum, A.; Meurer, T.; Michaelis, D.; Ochs, K. Synchronization of nonlinearly coupled networks of Chua oscillators. IFAC-PapersOnLine 2019, 52, 628–633. [Google Scholar] [CrossRef]
- Gambuzza, L.V.; Frasca, M.; Latora, V. Distributed control of synchronization of a group of network nodes. IEEE Trans. Autom. Control 2018, 64, 365–372. [Google Scholar] [CrossRef]
- Feketa, P.; Schaum, A.; Meurer, T. Synchronization and multicluster capabilities of oscillatory networks with adaptive coupling. IEEE Trans. Autom. Control 2020, 66, 3084–3096. [Google Scholar] [CrossRef]
- Delavari, H.; Mohadeszadeh, M. Hybrid Complex Projective Synchronization of Complex Chaotic Systems Using Active Control Technique with Nonlinearity in the Control Input. J. Control Eng. Appl. Inform. 2018, 20, 67–74. [Google Scholar]
- Khan, T.; Chaudhary, H. Controlling and Synchronizing Combined Effect of Chaos Generated in Generalized Lotka-Volterra Three Species Biological Model using Active Control Design. Appl. Appl. Math. 2020, 15, 25. [Google Scholar]
- Khan, T.; Chaudhary, H. Controlling Chaos Generated in Predator-Prey Interactions Using Adaptive Hybrid Combination Synchronization. In Proceedings of the 3rd International Conference on Computing Informatics and Networks: ICCIN 2020, Delhi, India, 29–30 July 2020; Springer: Singapore, 2021; pp. 449–459. [Google Scholar]
- Khan, T.; Chaudhary, H. Co-existence of Chaos and Control in Generalized Lotka–Volterra Biological Model: A Comprehensive Analysis. In International Symposium on Mathematical and Computational Biology; Springer: Cham, Switzerland, 2020; pp. 271–279. [Google Scholar]
- Kumar, S.; Matouk, A.E.; Chaudhary, H.; Kant, S. Control and synchronization of fractional-order chaotic satellite systems using feedback and adaptive control techniques. Int. J. Adapt. Control Signal Process. 2020, 35, 484–497. [Google Scholar] [CrossRef]
- Khan, T.; Chaudhary, H. Adaptive controllability of microscopic chaos generated in chemical reactor system using anti-synchronization strategy. Numer. Algebr. Control Optim. 2021. [Google Scholar] [CrossRef]
- Rasappan, S.; Vaidyanathan, S. Synchronization of hyperchaotic Liu system via backstepping control with recursive feedback. In International Conference on Eco-friendly Computing and Communication Systems; Springer: Berlin/Heidelberg, Germany, 2012; pp. 212–221. [Google Scholar]
- Khan, A.; Nigar, U. Sliding mode disturbance observer control based on adaptive hybrid projective compound combination synchronization in fractional-order chaotic systems. J. Control Autom. Electr. Syst. 2020, 31, 885–899. [Google Scholar] [CrossRef]
- Khan, A.; Nigar, U. Adaptive sliding mode disturbance observer control base synchronization in a class of fractional order Chua’s chaotic system. In Emerging Trends in Information Technology; Bloomsbury: New Delhi, India, 2019; pp. 107–118. [Google Scholar]
- Yi, X.; Guo, R.; Qi, Y. Stabilization of chaotic systems with both uncertainty and disturbance by the UDE-based control method. IEEE Access 2020, 8, 62471–62477. [Google Scholar] [CrossRef]
- Hubler, A. Adaptive control of chaotic system. Helv. Phys. Acta 1989, 62, 343–346. [Google Scholar]
- Bai, E.W.; Lonngren, K.E. Synchronization of two Lorenz systems using active control. Chaos Solitons Fractals 1997, 8, 51–58. [Google Scholar] [CrossRef]
- Runzi, L.; Yinglan, W.; Shucheng, D. Combination synchronization of three classic chaotic systems using active backstepping design. Chaos Interdiscip. J. Nonlinear Sci. 2011, 21, 043114. [Google Scholar] [CrossRef]
- Wu, Z.; Fu, X. Combination synchronization of three different order nonlinear systems using active backstepping design. Nonlinear Dyn. 2013, 73, 1863–1872. [Google Scholar] [CrossRef]
- Runzi, L.; Yinglan, W. Finite-time stochastic combination synchronization of three different chaotic systems and its application in secure communication. Chaos Interdiscip. J. Nonlinear Sci. 2012, 22, 023109. [Google Scholar] [CrossRef]
- Dongmo, E.D.; Ojo, K.S.; Woafo, P.; Njah, A.N. Difference synchronization of identical and nonidentical chaotic and hyperchaotic systems of different orders using active backstepping design. J. Comput. Nonlinear Dyn. 2018, 13, 051005. [Google Scholar] [CrossRef]
- El-Gohary, A.; Yassen, M. Optimal control and synchronization of Lotka–Volterra model. Chaos Solitons Fractals 2001, 12, 2087–2093. [Google Scholar] [CrossRef]
- Lin, J.S.; Huang, C.F.; Liao, T.L.; Yan, J.J. Design and implementation of digital secure communication based on synchronized chaotic systems. Digit. Signal Process. 2010, 20, 229–237. [Google Scholar] [CrossRef]
- Ngouonkadi, E.M.; Fotsin, H.; Fotso, P.L. Implementing a memristive Van der Pol oscillator coupled to a linear oscillator: Synchronization and application to secure communication. Phys. Scr. 2014, 89, 035201. [Google Scholar] [CrossRef]
- Wu, X.; Wang, H.; Lu, H. Modified generalized projective synchronization of a new fractional-order hyperchaotic system and its application to secure communication. Nonlinear Anal. Real World Appl. 2012, 13, 1441–1450. [Google Scholar] [CrossRef]
- Hou, Y.Y.; Chen, H.C.; Chang, J.F.; Yan, J.J.; Liao, T.L. Design and implementation of the Sprott chaotic secure digital communication systems. Appl. Math. Comput. 2012, 218, 11799–11805. [Google Scholar] [CrossRef]
- Dedieu, H.; Kennedy, M.P.; Hasler, M. Chaos shift keying: Modulation and demodulation of a chaotic carrier using self-synchronizing Chua’s circuits. IEEE Trans. Circuits Syst. II Analog. Digit. Signal Process. 1993, 40, 634–642. [Google Scholar] [CrossRef]
- Naderi, B.; Kheiri, H. Exponential synchronization of chaotic system and application in secure communication. Optik 2016, 127, 2407–2412. [Google Scholar] [CrossRef]
- He, J.; Cai, J.; Lin, J. Synchronization of hyperchaotic systems with multiple unknown parameters and its application in secure communication. Optik 2016, 127, 2502–2508. [Google Scholar] [CrossRef]
- Kinzel, W.; Englert, A.; Kanter, I. On chaos synchronization and secure communication. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 379–389. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, J.; Shen, Y.; Wang, X.; Chen, J. Finite-time combination-combination synchronization of four different chaotic systems with unknown parameters via sliding mode control. Nonlinear Dyn. 2014, 76, 383–397. [Google Scholar] [CrossRef]
- Perko, L. Differential Equations and Dynamical Systems; Springer: New York, NY, USA, 2013; Volume 7. [Google Scholar]
- Yadav, V.K.; Shukla, V.K.; Das, S. Difference synchronization among three chaotic systems with exponential term and its chaos control. Chaos Solitons Fractals 2019, 124, 36–51. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Synchronization | Authors | Time |
|---|---|---|
| 1. Combination synchronization of three classical chaotic systems using active backstepping design | Runzi, Luo and Yinglan, Wang and Shucheng, Deng | 4 |
| 2. Combination synchronization of three different order nonlinear systems using active backstepping design | Wu, Zhaoyan and Fu, Xinchu | 4.5 |
| 3. Finite-time stochastic combination synchronization of three different chaotic systems and its application in secure communication | Runzi, Luo and Yinglan, Wang | 3 |
| 4. Difference synchronization of identical and nonidentical chaotic and hyperchaotic systems of different orders using active backstepping design | Dongmo, Eric Donald and Ojo, Kayode Stephen and Woafo, Paul and Njah, Abdulahi Ndzi | 6 |
| 5. Difference synchronization among three chaotic systems with exponential term and its chaos control | Yadav, Vijay K and Shukla, Vijay K and Das, Subir | 4 |
| 6. Hybrid synchronization of generalized Lotka–Volterra three-species biological systems via adaptive control | Vaidyanathan, Sundarapandian | 0.8 |
| 7. CDPS approach attained utilizing active control approach | Mohammad Sajid, Harindri Chaudhary, Ayub Khan, Uzma Nigar, Santosh Kaushik | 0.5 |
| 8. CDPS approach attained using parameter identification method | Mohammad Sajid, Harindri Chaudhary, Ayub Khan, Uzma Nigar, Santosh Kaushik | 0.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaudhary, H.; Khan, A.; Nigar, U.; Kaushik, S.; Sajid, M. An Effective Synchronization Approach to Stability Analysis for Chaotic Generalized Lotka–Volterra Biological Models Using Active and Parameter Identification Methods. Entropy 2022, 24, 529. https://0-doi-org.brum.beds.ac.uk/10.3390/e24040529
Chaudhary H, Khan A, Nigar U, Kaushik S, Sajid M. An Effective Synchronization Approach to Stability Analysis for Chaotic Generalized Lotka–Volterra Biological Models Using Active and Parameter Identification Methods. Entropy. 2022; 24(4):529. https://0-doi-org.brum.beds.ac.uk/10.3390/e24040529
Chicago/Turabian StyleChaudhary, Harindri, Ayub Khan, Uzma Nigar, Santosh Kaushik, and Mohammad Sajid. 2022. "An Effective Synchronization Approach to Stability Analysis for Chaotic Generalized Lotka–Volterra Biological Models Using Active and Parameter Identification Methods" Entropy 24, no. 4: 529. https://0-doi-org.brum.beds.ac.uk/10.3390/e24040529