
UAV-Assisted Data Collection in Wireless Sensor Networks: A Comprehensive Survey

 ,
,  and
and 
Abstract
:1. Introduction
- Firstly, UAVs can be deployed in variable environments. Aerial data collection methods use the UAVs that could be navigated automatically as the mobile data collectors. UAVs are not limited to mobility like ground transportation and could be used in particular monitored regions, which humans could not approach.
- Secondly, aerial data collection is much quicker than ground data collection. Aerial data collection uses UAVs that have a greater speed of movement. It could increase the speed of searching and visiting nodes to shorten the life cycle of data collection when the WSN is a large-scale one.
- Thirdly, using UAV-assisted data collection will have lower latency and higher bandwidth. Aerial data collection often has fewer obstacles and larger coverage of wireless signals than ground data collection. Therefore, it could lower the communication latency and increase the bandwidth.
- Finally, while applying UAV data collection mechanisms, sensor nodes or relaying nodes only have to transmit data at short distances, the total energy consumption is significantly reduced.
2. System Models
2.1. Basic Definitions of System Elements
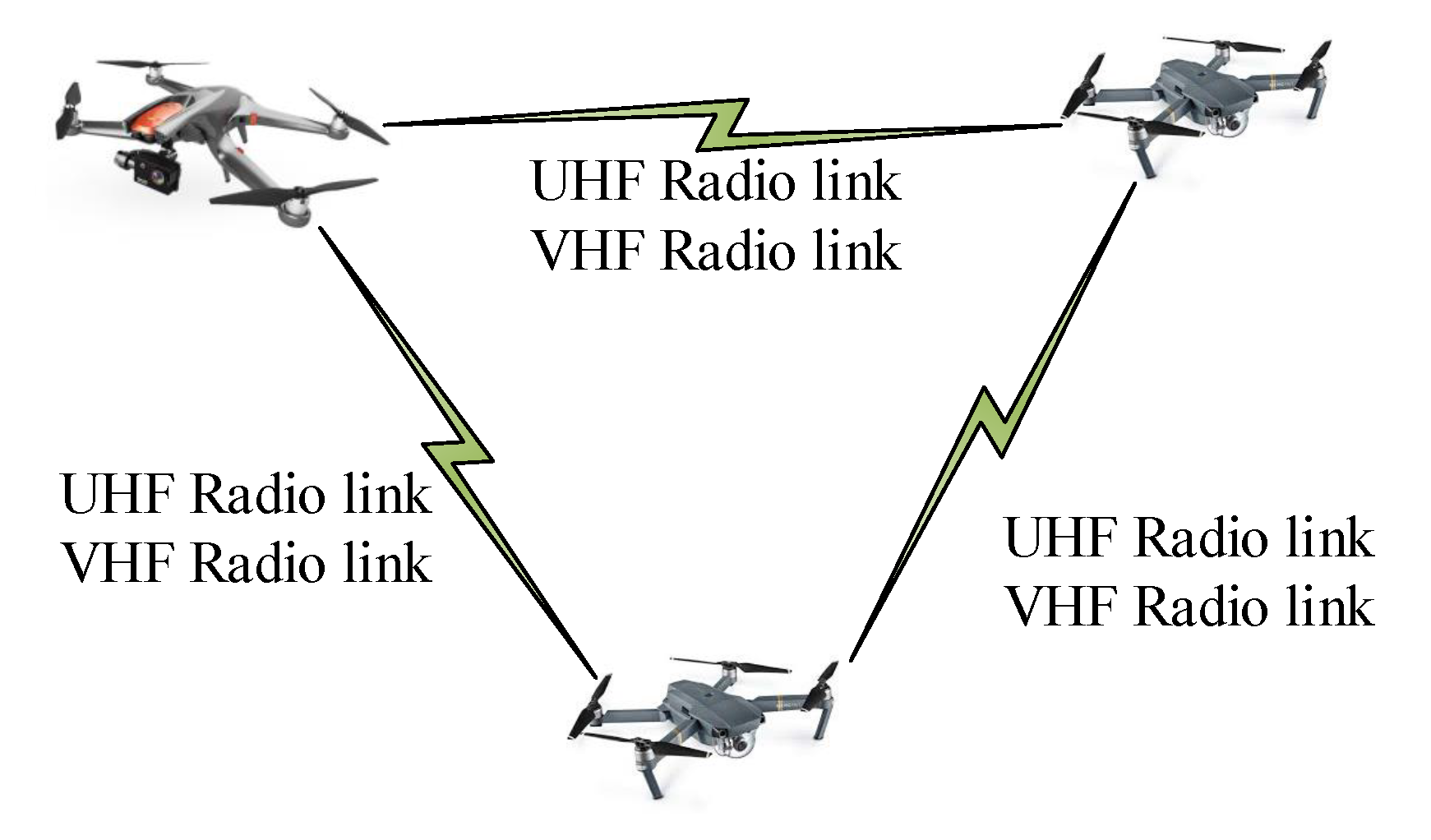
2.2. Communication Links
2.3. Data Collection Scenarios
- UAVs collect data from static sensors: In this architecture, UAVs collect data from static sensor nodes on the ground. In [43], sensing data from sensors are directly sent to UAVs. A reliable communication protocol is proposed to maximize the number of sensors that can transmit data at one time. The authors in [53] exploit a multiple-UAVs system to collect data from sensors. An algorithm called IBA-IP (Iterative Balanced Assignment with Integer Programming) is proposed to determine optimal initial positions for UAVs and sensor assignment to UAVs. In [54], a data collection scheme is proposed in which UAVs collect data from cluster heads. The cluster heads receive data from all cluster members and then send to UAVs. The UAVs can retrieve information about the whole network only by collecting data from several cluster heads. This scheme reduces the flying paths for UAVs as UAVs do not need to cover all sensors.
- UAVs collect data from mobile cluster heads: the Scalable Energy-efficient Asynchronous Dissemination (SEAD) is another option for routing sensing data to mobile sinks or mobile cluster heads [55]. The idea is to build a minimum Steiner tree for the mobile sinks or relay nodes. The access points are created from some nodes in the tree. Each mobile sink registers itself with the nearest access node. When the mobile agent moves out of the access node’s communication range, the route is extended to the new access point. In [56,57,58], the authors propose a data collection algorithm in a WSN utilizing a mobile cluster head and UAV. They integrate both communication devices as UAVs and mobile agents to save time and energy for sensor nodes.
- UAVs collect data from mobile sensors: currently, we have many different applications that require mobile sensor nodes in a certain area such as rescuing in the wilderness where targets are movable objects [29]. In the paper, four data collection algorithms are proposed for mobile WSNs assisted by UAVs. This work only considers the case that UAVs and mobile sensors move along a pre-defined straight path with constant velocities. The authors in [59] propose an optimization-based model to optimally deploy UAVs for mobile sensor coverage problems. The deployment of UAVs based on this method shows the effectiveness in fully coverage mobile sensors while ensuring a multi-hop communication channel for collecting data from mobile sensors to base stations.
3. Scheduling Mechanisms
3.1. Mobility-Free Mechanism
3.2. Mobility-Based Mechanism
4. Data Transfer in UAV-Assisted WSNs
4.1. Store-and-Forward Mechanisms
4.2. Real-Time Data Transfer Mechanisms
4.3. Hybrid Data Collection and Transfer Mechanisms
4.4. Blockchain-Based Swarm UAV Systems for Enhancing the Performance of Data Collection
5. Routing in UAV-Assisted WSNs
6. UAV Motion Control Problems
6.1. UAV Path-Planning
6.2. UAV Speed Control Mechanisms
- Speed of UAV while connected: this case refers to when the UAV is within the communication range of the RN. It means that it is operating the data collection process from the RN. This speed is measured in detail in the paper [104].
- The speed of the UAV when there is no connection: The UAV will change to another level of speed as it moves out of the RN’s communication distance. To ensure efficient data collection and to ensure real-time data, the UAV will speed up as fast as possible when it has no connection.
7. Opening Research Issues and Challenges
- UAV path planning: Finding a proper flying path for UAVs is still a major issue. The offline path planning method cannot guarantee robustness against model uncertainties, whereas the online path planning method may not provide optimal solutions to fulfill constraints such as time or distance constraints. A hybrid algorithm that combines the advantages of both offline and online approaches is a future research direction.
- Sensor-to-UAV Data Transfer: Transmitting sensing data to a UAV hovering over sensors could be a challenge [106]. Energy expenditure should be carefully considered in designing data transmitting protocol because of the limited energy of sensor nodes. Most data transfer protocols consider collecting data problems in one-dimensional WSNs while routing for UAV-assisted WSNs is three-dimensional. Therefore, data transfer needs to be further studied.
- UAV Coverage: The coverage of UAVs is also a critical issue. Most of the previous studies utilized a single UAV to collect data from static ground nodes. Therefore, coverage problems in two-dimensional scenarios are extensively studied. Recently, using a multiple-UAVs system has been extensively studied due to its high efficiency compared with using a single one. The coverage area of each UAV can be different depending on its altitude. It is necessary to investigate the coverage problems of multiple UAVs working together.
- Multi-UAV-Aided WSNs: Exploiting multi-UAV systems can offer significant enhancements in data collection time, latency, fault tolerance, and network lifetime [107]. Coordination among UAVs is posing challenges in implementing multiple UAV systems. Various problems need to be investigated, such as collision avoidance between UAVs, multi-hop communication for UAVs, etc.
- UAV Positioning: A common approach for UAV positioning is using accurate information from GPS. However, GPS signals may be weak or unavailable, for example, in disaster areas. Positioning only based on GPS single is not sufficient. This situation requires further research for advanced positioning techniques which are more robust.
- Security Issues: Security is a critical problem in either UAV-assisted WSNs or other remote sensing systems since they are often deployed outside with the lack of security. As sensor nodes and UAVs communicate with each other wirelessly, their communications have to face numerous security issues [108]. Several studies involving encryption and identity verification have been proposed to protect the security of the network attacked by bogus routing information, flooding attacks, etc. Designing a more reliable communication channel to meet security requirements would significantly encourage the deployment of UAV-assisted WSNs.
8. Conclusions and Future Developments
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hussain, R.; Sahgal, J.; Mishra, P.; Sharma, B. Application of WSN in rural development, agriculture water management. Int. J. Soft Comput. Eng. (IJSCE) 2012, 2, 68–72. [Google Scholar]
- Khanafer, M.; Guennoun, M.; Mouftah, H.T. WSN Architectures for Intelligent Transportation Systems. In Proceedings of the 2009 3rd International Conference on New Technologies, Mobility and Security, Cairo, Egypt, 20–23 December 2009; pp. 1–8. [Google Scholar]
- Wang, Z.; Ding, H.; Li, B.; Bao, L.; Yang, Z. An energy efficient routing protocol based on improved artificial bee colony algorithm for wireless sensor networks. IEEE Access 2020, 8, 133577–133596. [Google Scholar] [CrossRef]
- Vu, V.T.; Quyen, T.V.; Truong, L.H.; Le, A.M.; Nguyen, C.V.; Nguyen, M.T. Energy efficient approaches in wireless sensor networks. ICSES Trans. Comput. Netw. Commun. 2020, 6, 1–10. [Google Scholar]
- Zagrouba, R.; Kardi, A. Comparative Study of Energy Efficient Routing Techniques in Wireless Sensor Networks. Information 2021, 12, 42. [Google Scholar] [CrossRef]
- Tuan Nguyen, M.; Teague, K.A.; Rahnavard, N. CCS: Energy-efficient data collection in clustered wireless sensor networks utilizing block-wise compressive sensing. Comput. Netw. 2016, 106, 171–185. [Google Scholar] [CrossRef] [Green Version]
- Shyjith, M.; Maheswaran, C.; Reshma, V. Optimized and dynamic selection of cluster head using energy efficient routing protocol in WSN. Wirel. Pers. Commun. 2021, 116, 577–599. [Google Scholar] [CrossRef]
- Nguyen, M.T. Minimizing Energy Consumption in Random Walk Routing for Wireless Sensor Networks utilizing Compressed Sensing. In Proceedings of the 2013 8th International Conference on System of Systems Engineering, Maui, HI, USA, 2–6 June 2013; pp. 297–301. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Tree-Based Energy-Efficient Data Gathering in Wireless Sensor Networks Deploying Compressive Sensing. In Proceedings of the 2014 23rd Wireless and Optical Communication Conference (WOCC), Newark, NJ, USA, 9–10 May 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Rahnavard, N. Cluster-Based Energy-Efficient Data Collection in Wireless Sensor Networks Utilizing Compressive Sensing. In Proceedings of the MILCOM 2013-2013 IEEE Military Communications Conference, San Diego, CA, USA, 18–20 November 2013; pp. 1708–1713. [Google Scholar]
- Huang, R.; Ma, L.; Zhai, G.; He, J.; Chu, X.; Yan, H. Resilient routing mechanism for wireless sensor networks with deep learning link reliability prediction. IEEE Access 2020, 8, 64857–64872. [Google Scholar] [CrossRef]
- Shobana, M.; Sabitha, R.; Karthik, S. Cluster-based systematic data aggregation model (CSDAM) for real-time data processing in large-scale WSN. Wirel. Pers. Commun. 2020, 117, 2865–2883. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Truong, L.H.; Tran, T.T.; Chien, C.F. Artificial intelligence based data processing algorithm for video surveillance to empower industry 3.5. Comput. Ind. Eng. 2020, 148, 106671. [Google Scholar] [CrossRef]
- Qaisar, S.; Bilal, R.M.; Iqbal, W.; Naureen, M.; Lee, S. Compressive sensing: From theory to applications, a survey. J. Commun. Netw. 2013, 15, 443–456. [Google Scholar] [CrossRef]
- Vikram, R.; Sinha, D.; De, D.; Das, A.K. PAFF: Predictive analytics on forest fire using compressed sensing based localized Ad Hoc wireless sensor networks. J. Ambient Intell. Humaniz. Comput. 2021, 12, 1647–1665. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Mobile Distributed Compressive Sensing for Data Collection in Wireless Sensor Networks. In Proceedings of the 2015 International Conference on Advanced Technologies for Communications (ATC), Ho Chi Minh City, Vietnam, 14–16 October 2015; pp. 188–193. [Google Scholar]
- Zhou, Y.; Yang, L.; Yang, L.; Ni, M. Novel energy-efficient data gathering scheme exploiting spatial-temporal correlation for wireless sensor networks. Wirel. Commun. Mob. Comput. 2019, 2019, 4182563. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Compressive sensing based random walk routing in wireless sensor networks. Ad Hoc Netw. 2017, 54, 99–110. [Google Scholar] [CrossRef]
- Nguyen, M.T.; La, H.M.; Teague, K.A. Compressive and Collaborative Mobile Sensing for Scalar Field Mapping in Robotic Networks. In Proceedings of the 2015 53rd Annual Allerton Conference on Communication, Control, and Computing (Allerton), Control, Monticello, IL, USA, 29 September–2 October 2015; pp. 873–880. [Google Scholar]
- Chen, T.C.; Chen, T.S.; Wu, P.W. On data collection using mobile robot in wireless sensor networks. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 1213–1224. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Random Sampling in Collaborative and Distributed Mobile Sensor Networks Utilizing Compressive Sensing for Scalar Field Mapping. In Proceedings of the 2015 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, M.T.; Teague, K.A. Compressive and Cooperative Sensing in Distributed Mobile Sensor Networks. In Proceedings of the MILCOM 2015-2015 IEEE Military Communications Conference, Tampa, FL, USA, 26–28 October 2015; pp. 1033–1038. [Google Scholar] [CrossRef]
- Paz, E.B.O.; Zacharatou, E.T.; Markl, V. Towards Resilient Data Management for the Internet of Moving Things. BTW 2021 2021. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Shakoor, S.; Kaleem, Z.; Baig, M.I.; Chughtai, O.; Duong, T.Q.; Nguyen, L.D. Role of UAVs in Public Safety Communications: Energy Efficiency Perspective. IEEE Access 2019, 7, 140665–140679. [Google Scholar] [CrossRef]
- Say, S.; Inata, H.; Liu, J.; Shimamoto, S. Priority-based data gathering framework in UAV-assisted wireless sensor networks. IEEE Sens. J. 2016, 16, 5785–5794. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Yue, X.; Zhu, W. Cloud-assisted UAV data collection for multiple emerging events in distributed WSNs. Sensors 2017, 17, 1818. [Google Scholar] [CrossRef] [PubMed]
- Martinez-de Dios, J.R.; Lferd, K.; de San Bernabé, A.; Núnez, G.; Torres-González, A.; Ollero, A. Cooperation between UAS and wireless sensor networks for efficient data collection in large environments. J. Intell. Robot. Syst. 2013, 70, 491–508. [Google Scholar] [CrossRef]
- Ma, X.; Kacimi, R.; Dhaou, R. Fairness-Aware UAV-Assisted Data Collection in Mobile Wireless Sensor Networks. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 995–1001. [Google Scholar]
- Bouhamed, O.; Ghazzai, H.; Besbes, H.; Massoud, Y. A UAV-Assisted Data Collection for Wireless Sensor Networks: Autonomous Navigation and Scheduling. IEEE Access 2020, 8, 110446–110460. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Nguyen, M.T.; Do, H.T.; Hua, H.T.; Nguyen, C.V. DRL-Based Intelligent Resource Allocation for Diverse QoS in 5G and toward 6G Vehicular Networks: A Comprehensive Survey. Wirel. Commun. Mob. Comput. 2021, 2021, 1–21. [Google Scholar] [CrossRef]
- Liu, S.; Wei, Z.; Guo, Z.; Yuan, X.; Feng, Z. Performance Analysis of UAVs Assisted Data Collection in Wireless Sensor Network. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Hermosilla, T.; Palomar-Vázquez, J.; Balaguer-Beser, Á.; Balsa-Barreiro, J.; Ruiz, L.A. Using street based metrics to characterize urban typologies. Comput. Environ. Urban Syst. 2014, 44, 68–79. [Google Scholar] [CrossRef] [Green Version]
- Demirhan, M.; Premachandra, C. Development of an Automated Camera-Based Drone Landing System. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Zhang, X.; Du, Y.; Chen, F.; Qin, L.; Ling, Q. Indoor Position Control of a Quadrotor UAV with Monocular Vision Feedback. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 9760–9765. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.J.; Chen, J.A.; Huang, Y.M. Intelligent Environmental Sensing with an Unmanned Aerial System in a Wireless Sensor Network. Int. J. Smart Sens. Intell. Syst. 2017, 10. [Google Scholar] [CrossRef] [Green Version]
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned aerial vehicle based wireless sensor network for marine-coastal environment monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]
- Rhee, S.H.; Chung, K.; Kim, Y.; Yoon, W.; Chang, K.S. An Application-Aware MAC Scheme for IEEE 802.15. 3 High-Rate WPAN. In Proceedings of the 2004 IEEE Wireless Communications and Networking Conference (IEEE Cat. No. 04TH8733), Atlanta, GA, USA, 21–25 March 2004; Volume 2, pp. 1018–1023. [Google Scholar]
- Fadlullah, Z.M.; Takaishi, D.; Nishiyama, H.; Kato, N.; Miura, R. A dynamic trajectory control algorithm for improving the communication throughput and delay in UAV-aided networks. IEEE Netw. 2016, 30, 100–105. [Google Scholar] [CrossRef]
- Frew, E.W.; Brown, T.X. Airborne communication networks for small unmanned aircraft systems. Proc. IEEE 2008, 96, 2008–2027. [Google Scholar] [CrossRef]
- Huiru, C.; Xuanjiao, L.; Yeqian, L.; Guo, L. Design and Experiment of a WSN Sink Platform Based on fixed Wing Unmanned Aerial Vehicles. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 1271–1274. [Google Scholar]
- Ho, D.T.; Shimamoto, S. Highly Reliable Communication Protocol for WSN-UAV System Employing TDMA and PFS Scheme. In Proceedings of the 2011 IEEE Globecom Workshops (Gc Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1320–1324. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A comprehensive survey on UAV communication channel modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Azari, M.M.; Geraci, G.; Garcia-Rodriguez, A.; Pollin, S. UAV-to-UAV communications in cellular networks. IEEE Trans. Wirel. Commun. 2020, 19, 6130–6144. [Google Scholar] [CrossRef]
- Vinogradov, E.; Sallouha, H.; De Bast, S.; Azari, M.M.; Pollin, S. Tutorial on UAV: A blue sky view on wireless communication. arXiv 2019, arXiv:1901.02306. [Google Scholar]
- Chatzigiannakis, I.; Kinalis, A.; Nikoletseas, S. Sink Mobility Protocols for Data Collection in Wireless Sensor Networks. In Proceedings of the 4th ACM International Workshop on Mobility Management and Wireless Access, Terromolinos, Spain, 2 October 2006; pp. 52–59. [Google Scholar]
- Sarkar, T.K.; Ji, Z.; Kim, K.; Medouri, A.; Salazar-Palma, M. A survey of various propagation models for mobile communication. IEEE Antennas Propag. Mag. 2003, 45, 51–82. [Google Scholar] [CrossRef] [Green Version]
- Hashemi, H. Simulation of the urban radio propagation channel. IEEE Trans. Veh. Technol. 1979, 28, 213–225. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Gomez, K. Modeling cellular-to-UAV path-loss for suburban environments. IEEE Wirel. Commun. Lett. 2017, 7, 82–85. [Google Scholar] [CrossRef]
- Li, W.; Hu, X.; Jiang, T. Path loss models for IEEE 802.15. 4 vehicle-to-infrastructure communications in rural areas. IEEE Internet Things J. 2018, 5, 3865–3875. [Google Scholar] [CrossRef]
- Wei, P.; Gu, Q.; Sun, D. Wireless Sensor Network Data Collection by Connected Cooperative UAVs. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 5911–5916. [Google Scholar]
- Tazibt, C.Y.; Bekhti, M.; Djamah, T.; Achir, N.; Boussetta, K. Wireless Sensor Network Clustering for UAV-based Data Gathering. In Proceedings of the 2017 Wireless Days, Porto, Portugal, 29–31 March 2017; pp. 245–247. [Google Scholar]
- Kim, H.S.; Abdelzaher, T.F.; Kwon, W.H. Minimum-Energy Asynchronous Dissemination to Mobile Sinks in Wireless Sensor Networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 193–204. [Google Scholar]
- Dong, M.; Ota, K.; Lin, M.; Tang, Z.; Du, S.; Zhu, H. UAV-assisted data gathering in wireless sensor networks. J. Supercomput. 2014, 70, 1142–1155. [Google Scholar] [CrossRef]
- Anastasi, G.; Conti, M.; Passarella, A.; Pelusi, L. Mobile-relay forwarding in opportunistic networks. Adapt. Cross Layer Des. Wirel. Netw. 2008, 21, 389. [Google Scholar]
- Gatzianas, M.; Georgiadis, L. A distributed algorithm for maximum lifetime routing in sensor networks with mobile sink. IEEE Trans. Wirel. Commun. 2008, 7, 984–994. [Google Scholar] [CrossRef]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Optimization of Mobile Sensor Coverage with UAVs. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 622–627. [Google Scholar]
- Nguyen, M.T.; Nguyen, T.T.; Teague, K.A. An Energy-Efficient Combination of Sleeping Schedule and Cognitive Radio in Wireless Sensor Networks Utilizing Compressed Sensing. In Lecture Notes in Networks and Systems, Proceedings of the International Conference on Engineering Research and Applications, Thai Nguyen, Vietnam, 1–2 December 2020; Springer: Cham, Switzerland, 2020; pp. 154–160. [Google Scholar]
- Sayyed, A.; Becker, L.B. A survey on data collection in mobile wireless sensor networks (mwsns). In Cooperative Robots and Sensor Networks 2015; Springer: Cham, Switzerland, 2015; pp. 257–278. [Google Scholar]
- Chakrabarti, A.; Sabharwal, A.; Aazhang, B. Using predictable observer mobility for power efficient design of sensor networks. In Lecture Notes in Networks and Systems, Proceedings of the Information Processing in Sensor Networks, Palo Alto, CA, USA, 22–23 April 2003; Springer: Berlin/Heidelberg, Germang, 2003; pp. 129–145. [Google Scholar]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Anastasi, G.; Conti, M.; Di Francesco, M. Reliable and energy-efficient data collection in sparse sensor networks with mobile elements. Perform. Eval. 2009, 66, 791–810. [Google Scholar] [CrossRef]
- Ramli, M.R.; Lee, J.M.; Kim, D.S. Hybrid mac protocol for uav-assisted data gathering in a wireless sensor network. Internet Things 2019, 14, 100088. [Google Scholar] [CrossRef]
- Zhao, W.; Ammar, M.; Zegura, E. A Message Ferrying Approach for Data Delivery in Sparse Mobile Ad Hoc Networks. In Proceedings of the 5th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Tokyo, Japan, 24–26 May 2004; pp. 187–198. [Google Scholar]
- Schurgers, C.; Tsiatsis, V.; Ganeriwal, S.; Srivastava, M. Optimizing sensor networks in the energy-latency-density design space. IEEE Trans. Mob. Comput. 2002, 1, 70–80. [Google Scholar] [CrossRef]
- Yang, X.; Vaidya, N.H. A Wakeup Scheme for Sensor Networks: Achieving Balance between Energy Saving and End-to-End Delay. In Proceedings of the RTAS 2004. 10th IEEE Real-Time and Embedded Technology and Applications Symposium, Toronto, ON, Canada, 28 May 2004; pp. 19–26. [Google Scholar]
- Dyo, V.; Mascolo, C. Efficient node discovery in mobile wireless sensor networks. In Lecture Notes in Computer Science, Proceedings of the International Conference on Distributed Computing in Sensor Systems, Santorini Island, Greece, 11–14 June 2008; Springer: Berlin/Heidelberg, Germang, 2008; pp. 478–485. [Google Scholar]
- Shah, K.; Di Francesco, M.; Anastasi, G.; Kumar, M. A framework for resource-aware data accumulation in sparse wireless sensor networks. Comput. Commun. 2011, 34, 2094–2103. [Google Scholar] [CrossRef] [Green Version]
- Kondepu, K.; Restuccia, F.; Anastasi, G.; Conti, M. A Hybrid and Flexible Discovery Algorithm for Wireless Sensor Networks with Mobile Elements. In Proceedings of the 2012 IEEE Symposium on Computers and Communications (ISCC), Cappadocia, Turkey, 1–4 July 2012; pp. 295–300. [Google Scholar]
- Liu, J.; Wang, X.; Bai, B.; Dai, H. Age-Optimal Trajectory Planning for UAV-Assisted Data Collection. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 553–558. [Google Scholar]
- Abdulla, A.E.; Fadlullah, Z.M.; Nishiyama, H.; Kato, N.; Ono, F.; Miura, R. An Optimal Data Collection Technique for Improved Utility in UAS-Aided Networks. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 736–744. [Google Scholar]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless sensor networks and multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Berrahal, S.; Kim, J.H.; Rekhis, S.; Boudriga, N.; Wilkins, D.; Acevedo, J. Unmanned Aircraft Vehicle Assisted WSN-Based Border Surveillance. In Proceedings of the 2015 23rd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 16–18 September 2015; pp. 132–137. [Google Scholar]
- Pirmagomedov, R.; Kirichek, R.; Blinnikov, M.; Koucheryavy, A. UAV-based gateways for wireless nanosensor networks deployed over large areas. Comput. Commun. 2019, 146, 55–62. [Google Scholar] [CrossRef]
- Ferrer, E.C. The blockchain: A new framework for robotic swarm systems. In Advances in Intelligent Systems and Computing, Proceedings of the Future Technologies Conference, Vancouver, BC, Canada, 15–16 November 2018; Springer: Cham, Switzerland, 2018; pp. 1037–1058. [Google Scholar]
- Islam, A.; Shin, S.Y. Bus: A blockchain-enabled data acquisition scheme with the assistance of uav swarm in internet of things. IEEE Access 2019, 7, 103231–103249. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Y.; Niu, S.; Song, H. Lightweight blockchain assisted secure routing of swarm UAS networking. Comput. Commun. 2021, 165, 131–140. [Google Scholar] [CrossRef]
- Mazayev, A.; Correia, N.; Schütz, G. Data gathering in wireless sensor networks using unmanned aerial vehicles. Int. J. Wirel. Inf. Netw. 2016, 23, 297–309. [Google Scholar] [CrossRef]
- Laouira, M.L.; Abdelli, A.; Othman, J.B.; Kim, H. An efficient WSN based solution for border surveillance. IEEE Trans. Sustain. Comput. 2019, 6, 54–65. [Google Scholar] [CrossRef] [Green Version]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.H.; Assi, C. UAV-aided projection-based compressive data gathering in wireless sensor networks. IEEE Internet Things J. 2018, 6, 1893–1905. [Google Scholar] [CrossRef]
- Ho, D.T.; Grøtli, E.I.; Sujit, P.; Johansen, T.A.; Sousa, J.B. Optimization of wireless sensor network and UAV data acquisition. J. Intell. Robot. Syst. 2015, 78, 159–179. [Google Scholar] [CrossRef]
- Gomez, J.M.; Wiedemann, T.; Shutin, D. Unmanned aerial vehicles in wireless sensor networks: Automated sensor deployment and mobile sink nodes. In International Conference on Intelligent Autonomous Systems; Springer: Cham, Switzerland, 2018; pp. 943–953. [Google Scholar]
- Uddin, M.A.; Mansour, A.; Jeune, D.L.; Ayaz, M.; Aggoune, E.H.M. UAV-assisted dynamic clustering of wireless sensor networks for crop health monitoring. Sensors 2018, 18, 555. [Google Scholar] [CrossRef] [Green Version]
- Okcu, H.; Soyturk, M. Distributed clustering approach for UAV integrated wireless sensor networks. Int. J. Ad Hoc Ubiquitous Comput. 2014, 15, 106–120. [Google Scholar] [CrossRef]
- Zanjie, H.; Hiroki, N.; Nei, K.; Fumie, O.; Ryu, M.; Baohua, Z. Resource Allocation for Data Gathering in UAV-Aided Wireless Sensor Networks. In Proceedings of the 2014 4th IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 19–21 September 2014; pp. 11–16. [Google Scholar]
- Albu-Salih, A.T.; Seno, S.A.H. Energy-efficient data gathering framework-based clustering via multiple UAVs in deadline-based WSN applications. IEEE Access 2018, 6, 72275–72286. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.H.; Assi, C. Data Collection in Wireless Sensor Networks Using UAV and Compressive Data Gathering. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Zema, N.R.; Mitton, N.; Ruggeri, G. Using location services to autonomously drive flying mobile sinks in wireless sensor networks. In Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, Proceedings of the International Conference on Ad Hoc Networks, Rhodes, Greece, 18–19 August 2014; Springer: Cham, Switzerland, 2015; pp. 180–191. [Google Scholar]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Efficient data collection and tracking with flying drones. Ad Hoc Netw. 2019, 89, 35–46. [Google Scholar] [CrossRef] [Green Version]
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A collaborative UAV-WSN network for monitoring large areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Zhou, Q.; Cheng, C.T. A UAV-assisted topology-aware data aggregation protocol in WSN. Phys. Commun. 2019, 34, 48–57. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. A framework for using unmanned aerial vehicles for data collection in linear wireless sensor networks. J. Intell. Robot. Syst. 2014, 74, 437–453. [Google Scholar] [CrossRef]
- Villas, L.A.; Guidoni, D.L.; Maia, G.; Pazzi, R.W.; Ueyama, J.; Loureiro, A.A. An energy efficient joint localization and synchronization solution for wireless sensor networks using unmanned aerial vehicle. Wirel. Netw. 2015, 21, 485–498. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.I.; Han, Y. Energy-efficient UAV routing for wireless sensor networks. IEEE Trans. Veh. Technol. 2019, 69, 1741–1750. [Google Scholar] [CrossRef]
- Gong, J.; Chang, T.H.; Shen, C.; Chen, X. Flight time minimization of UAV for data collection over wireless sensor networks. IEEE J. Sel. Areas Commun. 2018, 36, 1942–1954. [Google Scholar] [CrossRef] [Green Version]
- Ho, D.T.; Grøtli, E.I.; Sujit, P.; Johansen, T.A.; De Sousa, J.B. Performance Evaluation of Cooperative Relay and Particle Swarm Optimization Path planning for UAV and Wireless Sensor Network. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1403–1408. [Google Scholar]
- Teh, S.; Mejias Alvarez, L.; Corke, P.; Hu, W. Experiments in integrating autonomous uninhabited aerial vehicles (UAVs) and wireless sensor networks. In Proceedings of the 2008 Australasian Conference on Robotics and Automation; Australian Robotics & Automation Association: Canberra, Australia, 2008; pp. 1–10. [Google Scholar]
- Sharma, A.; Singh, P.K.; Sharma, A.; Kumar, R. An efficient architecture for the accurate detection and monitoring of an event through the sky. Comput. Commun. 2019, 148, 115–128. [Google Scholar] [CrossRef]
- Cobano, J.; Alejo, D.; Heredia, G.; Martinez-de Dios, J.; Ollero, A. Efficient collision-free trajectory planning for WSN data collection with Unmanned Aerial Vehicles. IFAC Proc. Vol. 2013, 46, 220–225. [Google Scholar] [CrossRef]
- Basagni, S.; Carosi, A.; Melachrinoudis, E.; Petrioli, C.; Wang, Z.M. Controlled sink mobility for prolonging wireless sensor networks lifetime. Wirel. Netw. 2008, 14, 831–858. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, R.; Liu, Q.; Thompson, J.S.; Kadoch, M. Energy-efficient data collection and device positioning in UAV-assisted IoT. IEEE Internet Things J. 2019, 7, 1122–1139. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J. UAV-Based Data Communication in Wireless Sensor Networks: Models and Strategies. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 687–694. [Google Scholar]
- Somasundara, A.A.; Kansal, A.; Jea, D.D.; Estrin, D.; Srivastava, M.B. Controllably mobile infrastructure for low energy embedded networks. IEEE Trans. Mob. Comput. 2006, 5, 958–973. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Energy-Efficient and fast MAC protocol in UAV-Aided wireless sensor networks for Time-Critical applications. Sensors 2020, 20, 2635. [Google Scholar] [CrossRef]
- Harounabadi, M.; Mitschele-Thiel, A. Applying message forwarding and replication to multi-UAV message ferry networks. Mob. Netw. Appl. 2018, 23, 1337–1346. [Google Scholar] [CrossRef]
- Mao, J.; Jiang, X.; Zhang, X. Analysis of node deployment in wireless sensor networks in warehouse environment monitoring systems. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–15. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kind of Links | IEEE- Standards | Specifications | TR | Delay | CR | Protocol | |
|---|---|---|---|---|---|---|---|
| Sensor to cluster head [37,38,39] | Short distance | IEEE 802.15.3 | Unlicensed, 2.4 GHz, TDMA | >55 Mbps | <25 ns | 100 m | UWB |
| IEEE 802.15.4 | Unlicensed, 2.4 GHz, DSSS | <250 kbps | 15 ms | 100 m | Zigbee | ||
| Long distance | IEEE 802.15.4 | Unlicensed, 2.4 GHz, DSSS | <250 kbps | 15 ms | 1600 m 2500 m | Zigbee- Pro | |
| Air to Air and UAV to Ground station [40,41,42,43] | High data rate | IEEE 802.11a | Unlicensed, 5 GHz, OFDM | 54 Mbps | Slot time: 9 s, SIFS: 16 s, DIFS: 34 s, Propagation delay: 1 s | 120 m | |
| IEEE 802.11ac | Unlicensed, 5 GHz, QAM | 6933 Mbps | DIFS: 34 s SIFS: 16 s Slot time: 9 s | 120 m | |||
| Low to medium data rate | IEEE 802.11b | Unlicensed, 2.4 GHz, DSSS | 11 Mbps | Slot time: 20 s, SIFS: 10 s, DIFS: 50 s, Propagation delay: 1 s | 140 m | ||
| Low to high data rate | IEEE 802.11g | Unlicensed, 2.4 GHz, DSSS, OFDM | 54 Mbps | DIFS: 50 s SIFS: 20 s Slot time: 20 s | 140 m | Wi-Fi | |
| Medium to high data rate | IEEE 802.11n | Unlicensed, 2.4 GHz and 5 GHz, DSSS, OFDM | 600 Mbps | Slot time: 9 s, SIFS: 16 s, DIFS: 34 s, Propagation delay: 1 s | 250 m | ||
| UAV to UAV [45,46] | UHF VHF | 3 GHz 3000 MHz | |||||
| IEEE 802.11g | Unlicensed, 2.4 GHz, DSSS, OFDM | 54 Mbps | DIFS :50 s SIFS: 20 s Slot time: 20 s | 140 m | Wi-Fi | ||
| Problems Solved | ||||||||
|---|---|---|---|---|---|---|---|---|
| Topology | Protocol | UAV Trajectory | Power Expenditure | DTR | Covered | Delay | ToT | L&S |
| Routing Protocols for UAWSNs Base on Network Structure-Based Routing | ||||||||
| HHA [80] | x | |||||||
| SN-UAV [63] | x | |||||||
| UAV-WSN [81] | x | x | ||||||
| Fat | UAV- AS-MS [84] | x | ||||||
| URP [85] | x | x | ||||||
| C- UAV-WSN [28] | x | x | x | |||||
| rHEED [86] | x | x | ||||||
| UADG [56] | x | |||||||
| DPBA [87] | x | x | ||||||
| EEDGF [88] | x | |||||||
| PCDG [89] | x | x | ||||||
| Cluster- based | LS- UAV-WSN [90] | x | x | |||||
| ADCP [91] | x | x | ||||||
| H- UAV-WSN [92] | x | |||||||
| TADA [93] | x | |||||||
| Tree- based | UAV-CDG [82] | x | ||||||
| LSN | ULSN [94] | x | x | x | ||||
| Position | EEJLS- WSN-UAV [95] | x | x | |||||
| Routing Protocols for UAWSNs base on Protocol Operation-Based Routing | ||||||||
| PSO- WSN-UAV [83] | x | x | ||||||
| FSRP [26] | x | x | x | |||||
| Cluster- based | EFUR-WSN [96] | x | x | |||||
| Optimized Objectives | ||||||||
|---|---|---|---|---|---|---|---|---|
| Topology | Protocol | Trajectory of UAVs | Network Lifetime | DTP | DCC | Covered Area | NP | TR |
| Routing Protocols for UAWSNs base on Network Structure-Based Routing | ||||||||
| HHA | x | |||||||
| SN-UAV | x | |||||||
| UAV-WSN | x | |||||||
| Fat | UAV- AS-MS | x | ||||||
| URP | x | |||||||
| C- UAV-WSN | x | |||||||
| rHEED | x | |||||||
| UADG | x | |||||||
| DPBA | x | |||||||
| EEDGF | x | |||||||
| PCDG | x | x | ||||||
| Cluster- based | LS- UAV-WSN | x | ||||||
| ADCP | x | x | ||||||
| H- UAV-WSN | x | |||||||
| TADA | x | |||||||
| Tree- based | UAV-CDG | x | ||||||
| LSN | ULSN | x | ||||||
| Position | EEJLS- WSN-UAV | x | ||||||
| Routing Protocols for UAWSNs base on Protocol Operation-Based Routing | ||||||||
| PSO- WSN-UAV | x | x | x | |||||
| FSRP | x | |||||||
| Cluster- Based | EFUR-WSN | x | x | |||||
| Current Problems Solved | Protocol |
|---|---|
| Energy-efficient trajectory for UAVs | HHA, SN-UAV, rHEED, EEDGF |
| Scheduling appropriate operation time of nodes considering UAV trajectory | SN-UAV, EEJLS-WSN-UAV |
| A multi-layer framework makes devices cooperate more efficiently | UAV-WSN |
| Optimal path of UAV is planned by Vehicle Routing Problem. Sensors utilize a pre-planned path to schedule communication timetable to save energy | UAV-AS-MS |
| Adaptive path planning for UAVs considering dynamics topology of WSNs | C-UAV-WSN |
| Applicable for many networks’ density | UADG |
| Significantly improving transmission rate | DPBA, FSRP |
| Decreasing power expenditure by reducing transmission number | PCDG, UAV-CDG EFUR-WSN |
| Improving covered area | LS-UAV-WSN |
| Optimization of data collection cost in 3D environment is considered | ADCP |
| Efficient clustering algorithm for sensor considering the presence of obstacles and UAV’s routing | H-UAV-WSN |
| Exploiting advantages of compressed sensing methods while mitigating drawbacks data reconstruction error, etc. | TADA |
| A linear sensor network provides interference immunity | ULSN |
| Diminishing power consumption by finding the best topology | PSO-WSN-UAV |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, M.T.; Nguyen, C.V.; Do, H.T.; Hua, H.T.; Tran, T.A.; Nguyen, A.D.; Ala, G.; Viola, F. UAV-Assisted Data Collection in Wireless Sensor Networks: A Comprehensive Survey. Electronics 2021, 10, 2603. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10212603
Nguyen MT, Nguyen CV, Do HT, Hua HT, Tran TA, Nguyen AD, Ala G, Viola F. UAV-Assisted Data Collection in Wireless Sensor Networks: A Comprehensive Survey. Electronics. 2021; 10(21):2603. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10212603
Chicago/Turabian StyleNguyen, Minh T., Cuong V. Nguyen, Hai T. Do, Hoang T. Hua, Thang A. Tran, An D. Nguyen, Guido Ala, and Fabio Viola. 2021. "UAV-Assisted Data Collection in Wireless Sensor Networks: A Comprehensive Survey" Electronics 10, no. 21: 2603. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10212603