Closing the Wearable Gap—Part IV: 3D Motion Capture Cameras Versus Soft Robotic Sensors Comparison of Gait Movement Assessment

 , ,
, ,  , ,
, ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Study Design
2.3. Instrumentation and Participant Preparation
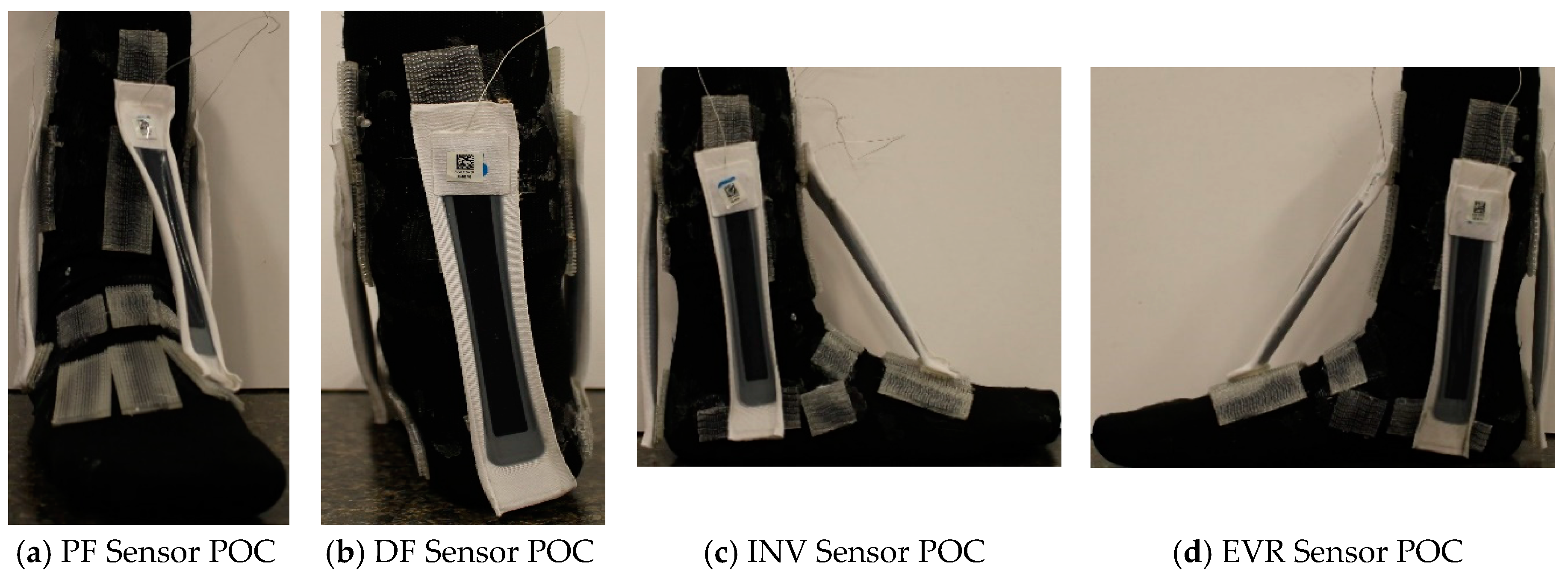
SRS POCs
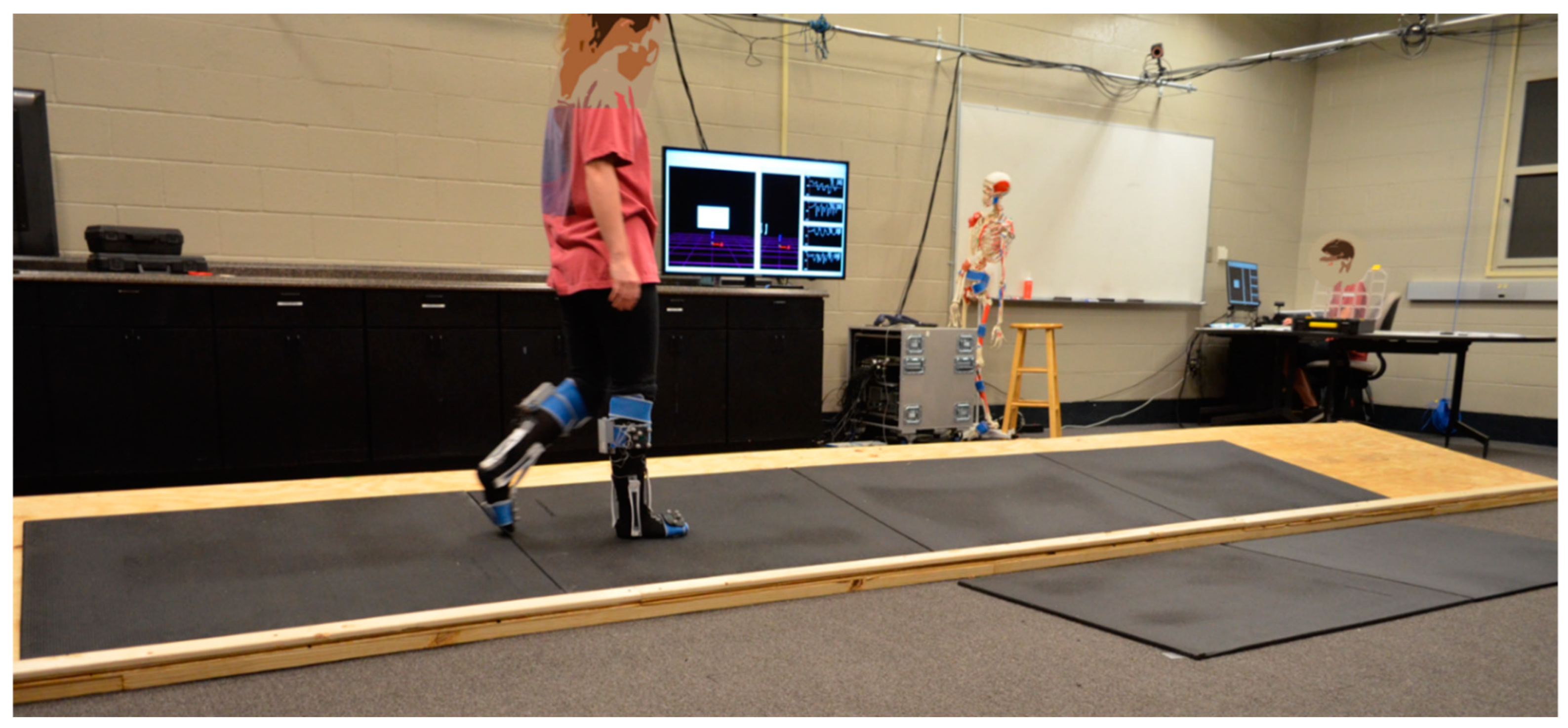
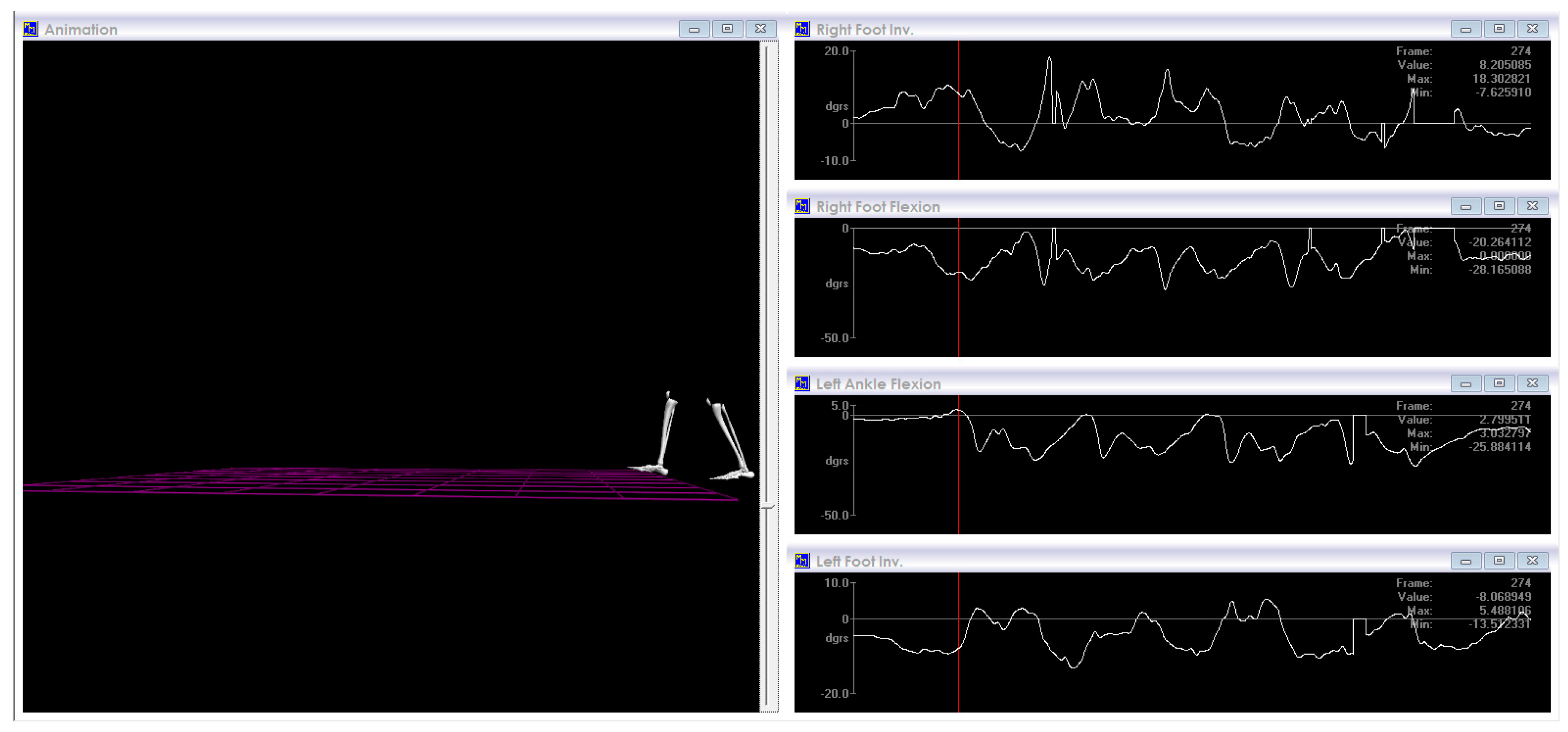
2.4. Experimental Procedures
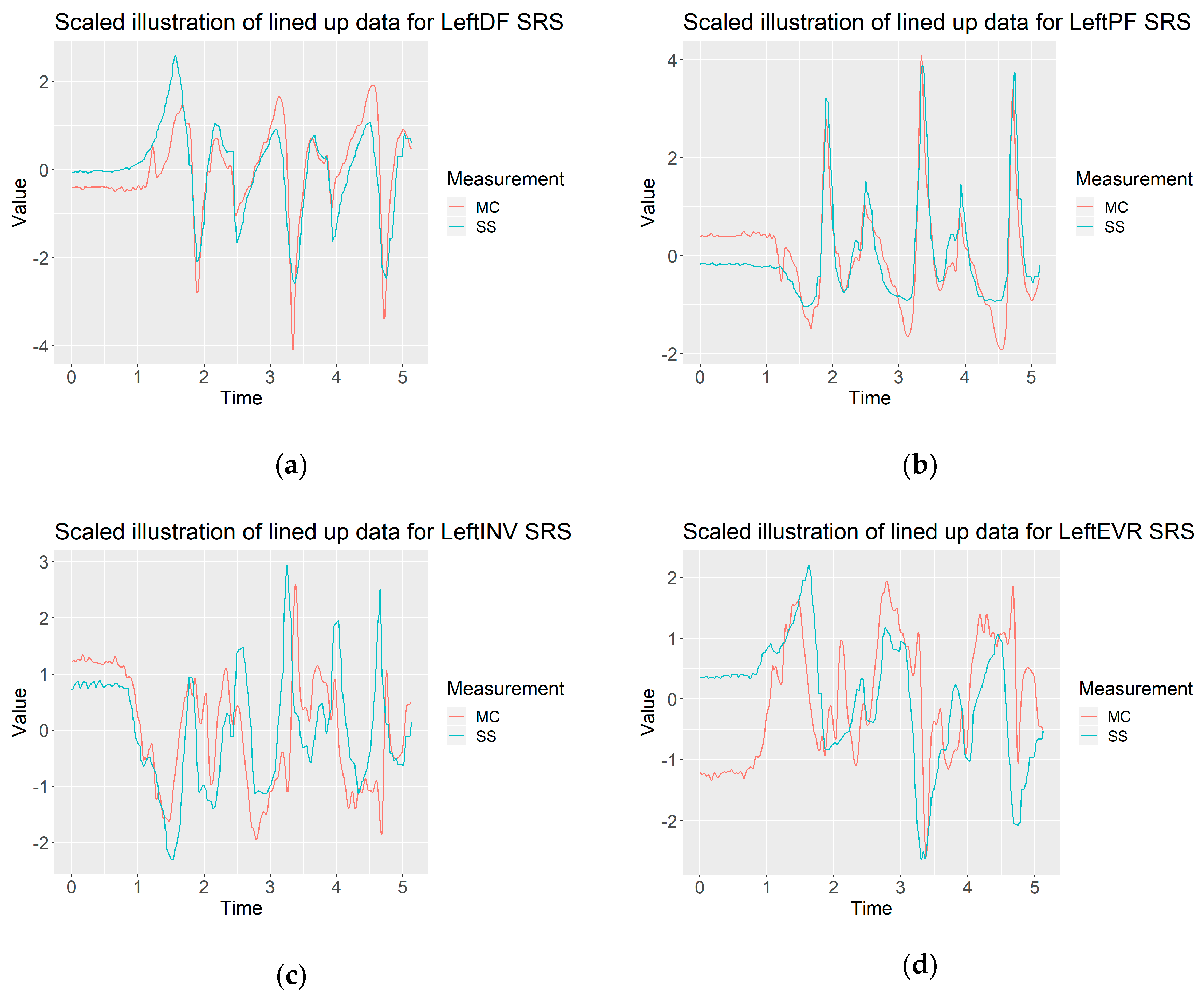
2.5. Data Preprocessing
2.6. Statistical Analysis
3. Results
4. Discussion
4.1. Mean MAE
4.2. Mean RMSE
4.3. Mean Adjusted R2
4.4. Stretch SRS Reduction Combinations
4.5. Limitations
4.6. Future Work
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Winter, D.A. Kinematic and kinetic patterns in human gait: Variability and compensating effects. Hum. Mov. Sci. 1984, 3, 51–76. [Google Scholar] [CrossRef]
- Winter, D.A.; Eng, F.F.; Isshac, M.G. A review of kinetic parameters in human walking. In Gait Analysis: Theory and Application; Mosby-Year Book: St. Louis, MO, USA, 1994; pp. 263–265. [Google Scholar]
- Fong, D.T.-P.; Chan, Y.-Y. The Use of Wearable Inertial Motion Sensors in Human Lower Limb Biomechanics Studies: A Systematic Review. Sensors 2010, 10, 11556–11565. [Google Scholar] [CrossRef] [PubMed]
- Chan, M.; Estève, D.; Fourniols, J.-Y.; Escriba, C.; Campo, E. Smart wearable systems: Current status and future challenges. Artif. Intell. Med. 2012, 56, 137–156. [Google Scholar] [CrossRef] [PubMed]
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of Motion Tracking Methods Based on Inertial Sensors: A Focus on Upper Limb Human Motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef] [PubMed]
- Foerster, F.; Smeja, M.; Fahrenberg, A.J. Detection of posture and motion by accelerometry: A validation study in ambulatory monitoring. Comput. Hum. Beha. 1999, 15, 571–583. [Google Scholar] [CrossRef]
- Espinosa, H.G.; Lee, J.; James, D.A. The inertial sensor: A base platform for wider adoption in sports science applications. J. Fit. Res. 2015, 4, 13–20. [Google Scholar]
- Luczak, T.; Saucier, D.; Burch, V.; Ball, J.; Chander, H.; Knight, A.; Wei, P.; Iftekhar, T. Closing the Wearable Gap: Mobile Systems for Kinematic Signal Monitoring of the Foot and Ankle. Electronics 2018, 7, 117. [Google Scholar] [CrossRef]
- Saucier, D.; Luczak, T.; Nguyen, P.; Davarzani, S.; Peranich, P.; Ball, J.E.; Burch, V.R.F.; Smith, B.K.; Chander, H.; Knight, A.; et al. Closing the Wearable Gap—Part II: Sensor Orientation and Placement for Foot and Ankle Joint Kinematic Measurements. Sensors 2019, 19, 3509. [Google Scholar] [CrossRef] [PubMed]
- Chander, H.; Stewart, E.; Saucier, D.; Nguyen, P.; Luczak, T.; Ball, J.E.; Knight, A.C.; Smith, B.K.; Burch, V.R.F.; Prabhu, R.K. Closing the Wearable Gap—Part III: Use of Stretch Sensors in Detecting Ankle Joint Kinematics During Unexpected and Expected Slip and Trip Perturbations. Electronics 2019, 8, 1083. [Google Scholar] [CrossRef]
- Mishra, E.; Jena, S.; Bhoi, C.; Arunachalam, T.; Panda, S.K. Effect of high heel gait on hip and knee-ankle-foot rollover characteristics while walking over inclined surfaces—A pilot study. Foot 2019, 40, 8–13. [Google Scholar] [CrossRef] [PubMed]
- Bianchi, L.; Angelini, D.; Orani, G.P.; Lacquaniti, F. Kinematic coordination in human gait: Relation to mechanical energy cost. J. Neurophysiol. 1998, 79, 2155–2170. [Google Scholar] [CrossRef] [PubMed]
- Gomeñuka, N.A.; Bona, R.L.; da Rosa, R.G.; Peyré-Tartaruga, L.A. The pendular mechanism does not determine the optimal speed of loaded walking on gradients. Hum. Mov. Sci. 2016, 47, 175–185. [Google Scholar] [CrossRef] [PubMed]
- Blair, S.; Lake, M.J.; Ding, R.; Sterzing, T. Magnitude and variability of gait characteristics when walking on an irregular surface at different speeds. Hum. Mov. Sci. 2018, 59, 112–120. [Google Scholar] [CrossRef] [PubMed]
- Wrightson, J.G.; Schäfer, L.; Smeeton, N.J. Dual-task prioritization during overground and treadmill walking in healthy adults. Gait Posture 2019, 75, 109–114. [Google Scholar] [CrossRef] [PubMed]
- Kwon, Y.-H.; Hutcheson, L.; Casebolt, J.B.; Ryu, J.-H.; Singhal, K. The Effects of Railroad Ballast Surface and Slope on Rearfoot Motion in Walking. J. Appl. Biomech. 2012, 28, 457–465. [Google Scholar] [CrossRef] [PubMed]
- Backus, S.I.; Brown, A.M.; Barr, A.E. Biomechanics of Gait. In Basic Biomechanics of the Musculoskeletal System; Nordin, M., Frankel, V.H., Eds.; LWW: Philadelphia, PA, USA, 2012; pp. 426–443. [Google Scholar]
- Winter, D.A. Biomechanical Motor Patterns in Normal Walking. J. Mot. Behav. 1983, 15, 302–330. [Google Scholar] [CrossRef] [PubMed]
- Savitzky, A.; Golay, M.J. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Davey, N.; Wixted, A.; Ohgi, Y.; James, D.A. A low cost self contained platform for human motion analysis. In The Impact of Technology on Sport II; CRC Press: Boca Raton, FL, USA, 2008; pp. 101–111. [Google Scholar]
- Paraschiv-Ionescu, A.; Buchser, E.E.; Rutschmann, B.; Najafi, B.; Aminian, K. Ambulatory system for the quantitative and qualitative analysis of gait and posture in chronic pain patients treated with spinal cord stimulation. Gait Posture 2004, 20, 113–125. [Google Scholar] [CrossRef] [PubMed]
- Awal, M.A.; Mostafa, S.S.; Ahmad, M. Performance Analysis of Savitzky-Golay Smoothing Filter Using ECG Signal. Int. J. Comput. Inf. Technol. 2011, 1, 24–29. [Google Scholar]
- JJ, MAE and RMSE—Which Metric Is Better? Medium. 23 March 2016. Available online: https://medium.com/human-in-a-machine-world/mae-and-rmse-which-metric-is-better-e60ac3bde13d (accessed on 28 October 2019).
- Grace-Martin, K. Assessing the Fit of Regression Models. The Analysis Factor. 8 December 2008. Available online: https://www.theanalysisfactor.com/assessing-the-fit-of-regression-models/ (accessed on 30 October 2019).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistic (°) | All Sensors for Each Motion | Two Sensors for Each Motion | No PF Sensor | No DF Sensor | No INV Sensor | No EVR Sensor |
|---|---|---|---|---|---|---|
| Mean MAE | 1.54 | 1.96 | 1.85 | 1.88 | 1.81 | 1.89 |
| Mean RMSE | 1.96 | 2.45 | 2.36 | 2.34 | 2.29 | 2.36 |
| Mean Adjusted R2 | 0.854 | 0.779 | 0.806 | 0.802 | 0.781 | 0.791 |
| Standard Deviation MAE | 0.612 | 0.761 | 0.790 | 0.848 | 0.683 | 0.753 |
| Standard Deviation RMSE | 0.779 | 0.935 | 1.030 | 1.030 | 0.849 | 0.920 |
| Standard Deviation Adjusted R2 | 0.134 | 0.188 | 0.160 | 0.167 | 0.213 | 0.179 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saucier, D.; Davarzani, S.; Turner, A.; Luczak, T.; Nguyen, P.; Carroll, W.; Burch V, R.F.; Ball, J.E.; Smith, B.K.; Chander, H.; et al. Closing the Wearable Gap—Part IV: 3D Motion Capture Cameras Versus Soft Robotic Sensors Comparison of Gait Movement Assessment. Electronics 2019, 8, 1382. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics8121382
Saucier D, Davarzani S, Turner A, Luczak T, Nguyen P, Carroll W, Burch V RF, Ball JE, Smith BK, Chander H, et al. Closing the Wearable Gap—Part IV: 3D Motion Capture Cameras Versus Soft Robotic Sensors Comparison of Gait Movement Assessment. Electronics. 2019; 8(12):1382. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics8121382
Chicago/Turabian StyleSaucier, David, Samaneh Davarzani, Alana Turner, Tony Luczak, Phuoc Nguyen, Will Carroll, Reuben F. Burch V, John E. Ball, Brian K. Smith, Harish Chander, and et al. 2019. "Closing the Wearable Gap—Part IV: 3D Motion Capture Cameras Versus Soft Robotic Sensors Comparison of Gait Movement Assessment" Electronics 8, no. 12: 1382. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics8121382