External Breaking Vibration Identification Method of Transmission Line Tower Based on Solar-Powered RFID Sensor and CNN


Abstract
:1. Introduction
2. Design of Solar-Powered RFID Sensor
3. Deep Learning Model
3.1. Identification Process
3.2. Data Preprocessing
3.3. Convolutional Neural Network
3.4. Relevant Vector Machine
4. Simulation and Experiment Results and Discussion
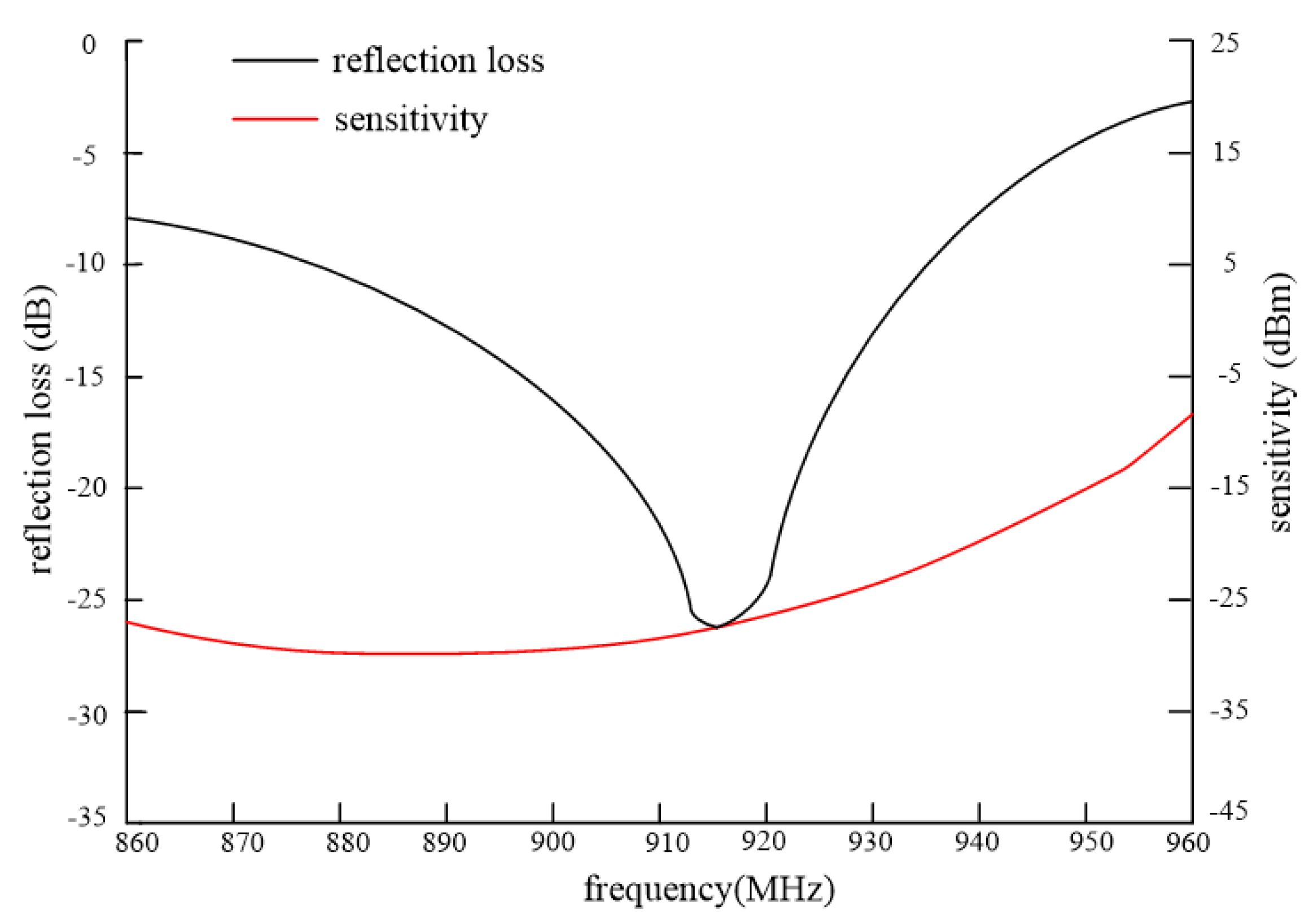
4.1. Solar-Powered RFID Sensor Tag Test
4.2. Identification Scheme Results
4.2.1. Training Sample Acquisition
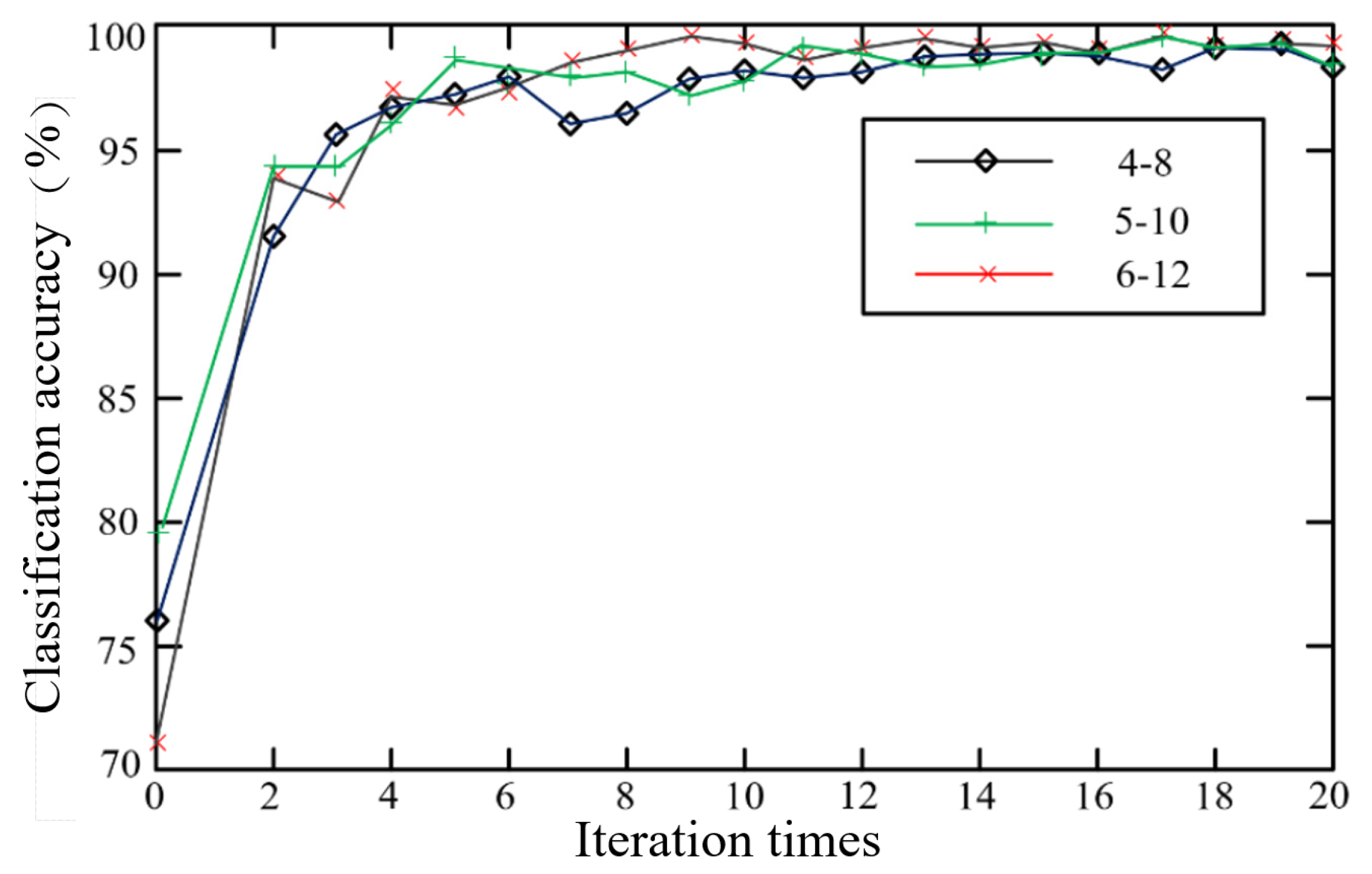
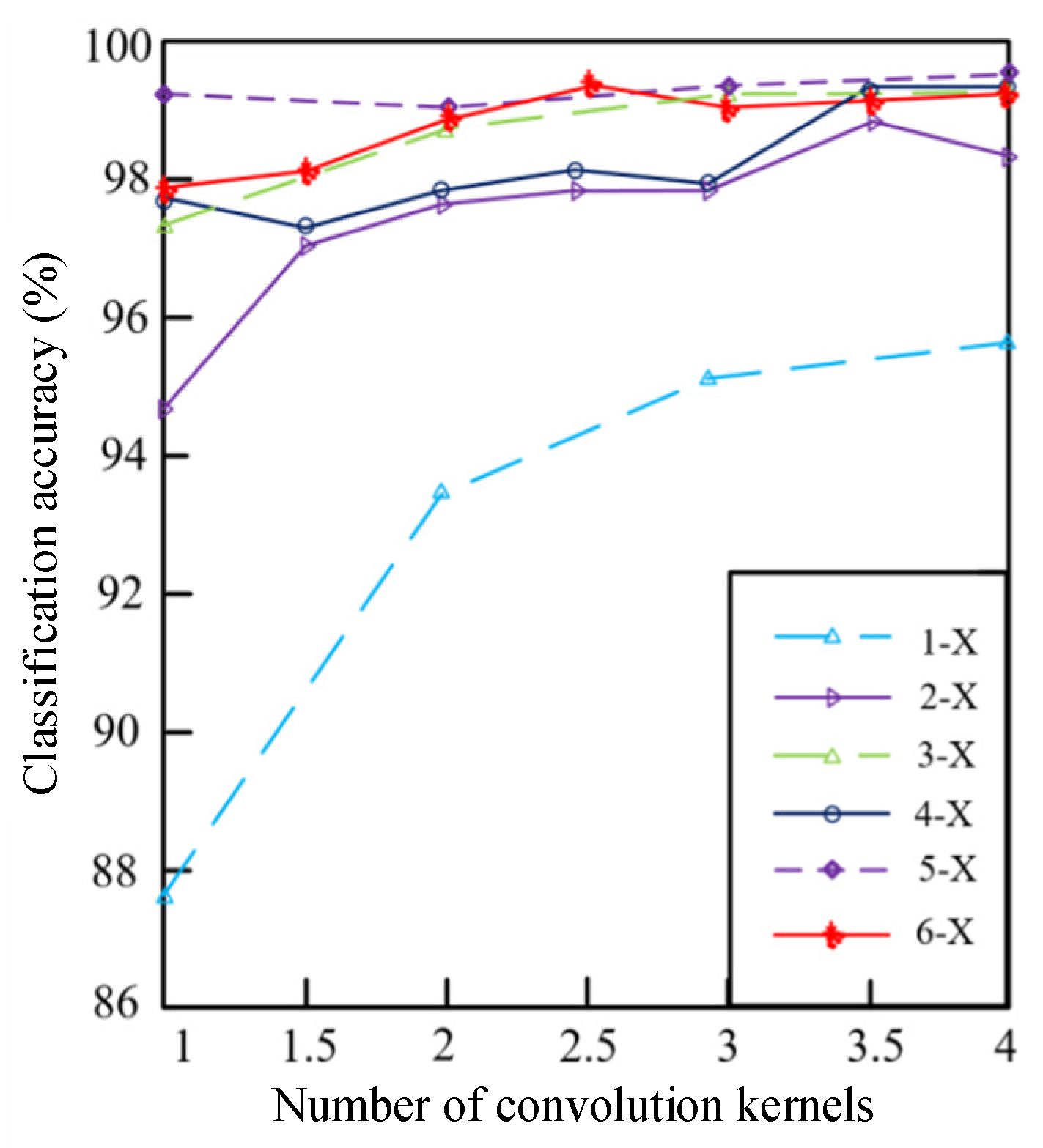
4.2.2. CNN Training
- Number of iterations
- 2.
- Mini-batch
- 3.
- Number of convolution kernels
4.2.3. RVM Identification
4.2.4. Model Classification Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xiong, X.; Weng, S.; Wang, J. An online early-warning method for wind swing discharge of the conductor toward the tangent tower and jumper toward the strain tower. IEEE Trans. Power Deliv. 2014, 30, 114–121. [Google Scholar] [CrossRef]
- Tang, Y.; Xu, X.; Chen, B.; Yi, T. Early warning method of transmission tower considering plastic fatigue damage under typhoon weather. IEEE Access 2019, 7, 63983–63991. [Google Scholar] [CrossRef]
- Moghe, R.; Iyer, A.R.; Lambert, F.C.; Divan, D.M. A low-cost wireless voltage sensor for monitoring MV/HV utility assets. IEEE Trans. Smart Grid 2014, 5, 2002–2009. [Google Scholar] [CrossRef]
- Gao, M.; Wang, P.; Wang, Y.; Yao, L. Self-powered ZigBee wireless sensor nodes for railway condition monitoring. IEEE Trans. Intell. Transp. Syst. 2017, 19, 900–909. [Google Scholar] [CrossRef]
- Lee, H.C.; Ke, K.H. Monitoring of large-area IoT sensors using a LoRa wireless mesh network system: Design and evaluation. IEEE Trans. Instrum. Meas. 2018, 67, 2177–2187. [Google Scholar] [CrossRef]
- Shi, L.; He, Y.; Li, B.; Cheng, T.; Huang, Y.; Sui, Y. Transmission tower tilt angle on-line prognosis by using solar-powered LoRa sensor node and sliding XGBoost predictor. IEEE Access 2019, 7, 86168–86176. [Google Scholar] [CrossRef]
- Oh, S.M.; Shin, J. An efficient small data transmission scheme in the 3GPP NB-IoT system. IEEE Commun. Lett. 2016, 21, 660–663. [Google Scholar] [CrossRef]
- Chen, X.; Li, Z.; Chen, Y.; Wang, X. Performance analysis and uplink scheduling for QoS-aware NB-IoT networks in mobile computing. IEEE Access 2019, 7, 44404–44415. [Google Scholar] [CrossRef]
- Deng, F.; Zuo, P.; Wen, K.; Wu, X.; He, Y. Low delay technology research of transmission line tower monitoring network integrating WSN and RFID. IEEE Access 2019, 7, 111065–111073. [Google Scholar] [CrossRef]
- Deng, F.; He, Y.; Li, B.; Song, Y.; Wu, X. Design of a slotted chipless RFID humidity Sensor tag. Sens. Actuators B Chem. 2018, 264, 255–262. [Google Scholar] [CrossRef]
- Feng, Y.; Xie, L.; Chen, Q.; Zheng, L.-R. Low-cost printed chipless RFID humidity sensor tag for intelligent packaging. IEEE Sens. J. 2015, 15, 3201–3208. [Google Scholar] [CrossRef]
- De Donno, D.; Catarinucci, L.; Tarricone, L. RAMSES: RFID augmented module for smart environmental sensing. IEEE Trans. Instrum. Meas. 2014, 63, 1701–1708. [Google Scholar] [CrossRef]
- Deng, F.; Zuo, P.; Wen, K.; Wu, X. Novel soil environment monitoring system based on RFID sensor and LoRa. Comput. Electron. Agric. 2020, 169, 105169. [Google Scholar] [CrossRef]
- De Donno, D.; Catarinucci, L.; Tarricone, L. A battery-assisted sensor-enhanced RFID tag enabling heterogeneous wireless sensor networks. IEEE Sens. J. 2014, 14, 1048–1055. [Google Scholar] [CrossRef]
- Duong, V.-H.; Hieu, N.X.; Lee, H.-S.; Lee, J.-W. A battery-assisted passive EPC Gen-2 RFID sensor tag IC with efficient battery power management and RF energy harvesting. IEEE Trans. Ind. Electron. 2016, 63, 7112–7123. [Google Scholar] [CrossRef]
- Wang, T.; He, Y.; Shi, T.; Tong, J.; Li, B. Transformer health management based on self-powered RFID sensor and multiple kernel RVM. IEEE Trans. Instrum. Meas. 2018, 68, 818–828. [Google Scholar] [CrossRef]
- Niyato, D.; Hossain, E.; Fallahi, A. Sleep and wakeup strategies in solar-powered wireless sensor/mesh networks: Performance analysis and optimization. IEEE Trans. Mobile Comput. 2006, 6, 221–236. [Google Scholar] [CrossRef]
- Li, W.; Monti, A.; Ponci, F. Fault detection and classification in medium voltage DC shipboard power systems with wavelets and artificial neural networks. IEEE Trans. Instrum. Meas. 2014, 63, 2651–2665. [Google Scholar] [CrossRef]
- Bouthiba, T. Fault detection and classification technique in EHV transmission lines based on artificial neural networks. Eur. Trans. Electr. Power 2005, 15, 443–454. [Google Scholar] [CrossRef]
- Khosravi, A.; Nahavandi, S.; Creighton, D.; Atiya, A.F. Comprehensive review of neural network-based prediction intervals and new advances. IEEE Trans. Neural Netw. 2011, 22, 1341–1356. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Neural Information Processing Systems 2012, Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Casella, I.R.S.; Pereira, A.L. A bioinspired propagation model for Brazilian digital TV system based on MLP and RBF networks. IEEE Lat. Am. Trans. 2016, 14, 3941–3948. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Hu, J.; Luo, Y.; Zhang, Q.; Liu, X.; Qu, X. Micro-motion feature extraction of space targets based on sinusoidal frequency modulation Fourier transform. J. Eng. 2019, 2019, 8076–8079. [Google Scholar] [CrossRef]
- Guo, X.; Huang, X.; Zhang, L. Three-dimensional wavelet texture feature extraction and classification for multi/hyperspectral imagery. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2183–2187. [Google Scholar]
- Iwata, K. Extending the peak bandwidth of parameters for softmax selection in reinforcement learning. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 1865–1877. [Google Scholar] [CrossRef] [PubMed]
- Cheong, J.Y.; Park, I.K. Deep CNN-based super-resolution using external and internal examples. IEEE Signal Process. Lett. 2017, 24, 1252–1256. [Google Scholar] [CrossRef]
- Li, Y.; Song, Y.; Li, C. Selection of parameters for phase space reconstruction of chaotic time series. In Proceedings of the 2010 IEEE Fifth International Conference on Bio-Inspired Computing: Theories and Applications (BIC-TA), IEEE, Changsha, China, 23–26 September 2010; pp. 30–33. [Google Scholar]
- Zhang, D.; Wang, X.; Song, X.; Zhao, D. A novel approach to mapped correlation of ID for RFID anti-collision. IEEE Trans. Serv. Comput. 2014, 7, 741–748. [Google Scholar] [CrossRef]
- Ma, Q.; Zhou, F. The differential approximation method to determine a scale parameter interval for a multi-scale Gaussian kernel RVM regression. In Proceedings of the 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC), Shenyang, China, 20–22 December 2013. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Type |
|---|---|
| MCU | MSP430FR6964 |
| RIFD Chip | Monza X-8K |
| Acceleration Sensor | ADXL372 |
| DC-DC Charge Pump | LTC3225 |
| LDO | TPS780 |
| Photovoltaic Cell | 8 × 8 cm2 |
| Communication Antenna | Microstrip, 915MHz |
| Query Frequency (/min) | Initial Voltage (V) | Final Voltage (V) | Initial Time | Final Time |
|---|---|---|---|---|
| 20 | 5.31 | 3.2 | 13:05 (1st day) | 16:25 (2nd day) |
| 10 | 5.28 | 3.19 | 14:35 (1st day) | 13:05 (2nd day) |
| 5 | 5.32 | 3.22 | 08:10 (1st day) | 23:31 (2nd day) |
| Design | Power Supply | Maximum Distance/Reader Power (m/W) |
|---|---|---|
| [12] | RFID reader | 10/2 |
| [13] | RFID reader | 9.8/2 |
| [14] | Battery | 22/3.2 |
| [15] | Battery | 17.4/2 |
| [16] | Vibration energy | 18.2/3.2 |
| This work | Solar energy | 21/3.2 |
| Components | Parameter |
|---|---|
| Operating System | Ubuntu16.04 |
| Memory | 8G |
| CPU | Intel Core i7-8700 |
| GPU | NVIDIA GTX1070ti |
| RAM | 8G |
| Vibration Type | Wind Speed (m/s) | Sample Size (group) |
|---|---|---|
| Simulated external breaking (Iron bar) | 0.3 | 1000 |
| Simulated external breaking (Rubber bar) | 0.1 | 1000 |
| Simulated external breaking (Stick) | 0.5 | 1000 |
| Wind excitation under no ice-covered condition | 1.8 | 1000 |
| Wind excitation under no ice-covered condition | 7.9 | 1000 |
| Wind excitation under no ice-covered condition | 11.2 | 1000 |
| Wind excitation under ice-covered condition | 3.9 | 1000 |
| Wind excitation under ice-covered condition | 10.5 | 1000 |
| Wind excitation under ice-covered condition | 12.7 | 1000 |
| Network Layer | Parameter Name | Parameter Quantity | Step | Output |
|---|---|---|---|---|
| Input | / | / | / | 1 × 1024 |
| Conv-1 | Convolution kernel | 32@1 × 32 | 1 × 1 | 32@1 × 1024 |
| Pooling-1 | Pooling area | 1 × 2 | 1 × 2 | 32@1 × 512 |
| Conv-2 | Convolution kernel | 64@1 × 16 | 1 × 1 | 64@1 × 512 |
| Pooling-2 | Pooling area | 1 × 2 | 1 × 2 | 64@1 × 256 |
| Conv-3 | Convolution kernel | 64@1 × 8 | 1 × 1 | 64@1 × 256 |
| Pooling-3 | Pooling area | 1 × 2 | 1 × 2 | 64@1 × 128 |
| Fully connected-1 | Linking weight | 1024 × 500 | / | 500 |
| Fully connected-2 | Linking weight | 500 × 10 | / | 10 |
| Vibration Type | Accuracy |
|---|---|
| Simulated vibration | 99.27% |
| No ice wind excitation | 99.67% |
| Ice wind excitation | 99.33% |
| Vibration Type | Simulated Vibration | No ice Wind Excitation | Ice Wind Excitation |
|---|---|---|---|
| FFT-BP | 69.66% | 60.33% | 68.43% |
| FFT-SVM | 82.15% | 85.62% | 81.88% |
| FFT-RVM | 84.26% | 88.33% | 85.22% |
| CNN-SVM | 95.11% | 97.72% | 93.44% |
| CNN-RVM | 99.27% | 99.67% | 99.33% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, F.; Wen, K.; Xie, Z.; Liu, H.; Tong, J. External Breaking Vibration Identification Method of Transmission Line Tower Based on Solar-Powered RFID Sensor and CNN. Electronics 2020, 9, 519. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9030519
Deng F, Wen K, Xie Z, Liu H, Tong J. External Breaking Vibration Identification Method of Transmission Line Tower Based on Solar-Powered RFID Sensor and CNN. Electronics. 2020; 9(3):519. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9030519
Chicago/Turabian StyleDeng, Fangming, Kaiyun Wen, Zhongxin Xie, Huafeng Liu, and Jin Tong. 2020. "External Breaking Vibration Identification Method of Transmission Line Tower Based on Solar-Powered RFID Sensor and CNN" Electronics 9, no. 3: 519. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9030519