Accurate Fall Detection and Localization for Elderly People Based on Neural Network and Energy-Efficient Wireless Sensor Network

 ,
,  ,
,
Abstract
:1. Introduction
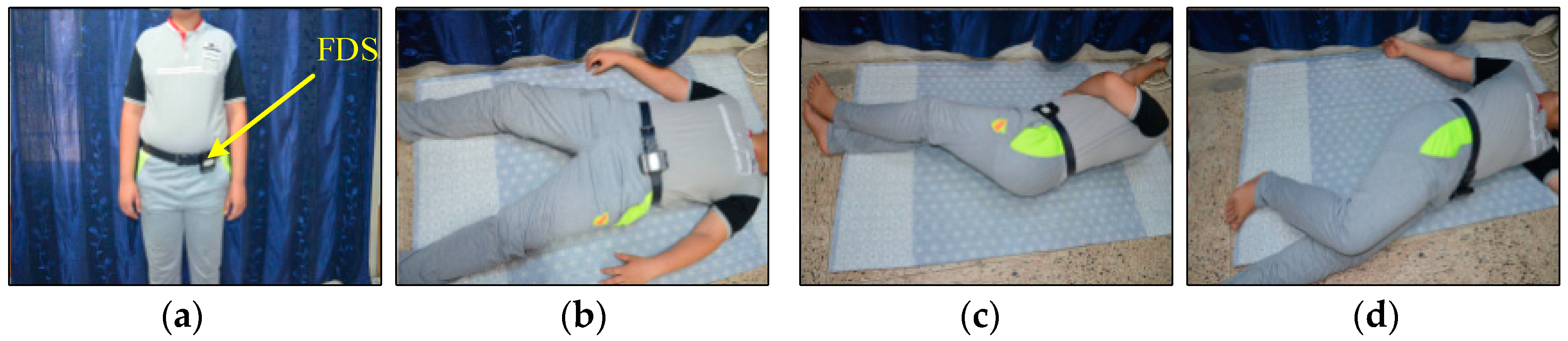
- Fall detection of elderly people is accurately detected based on FDS carried by the patient
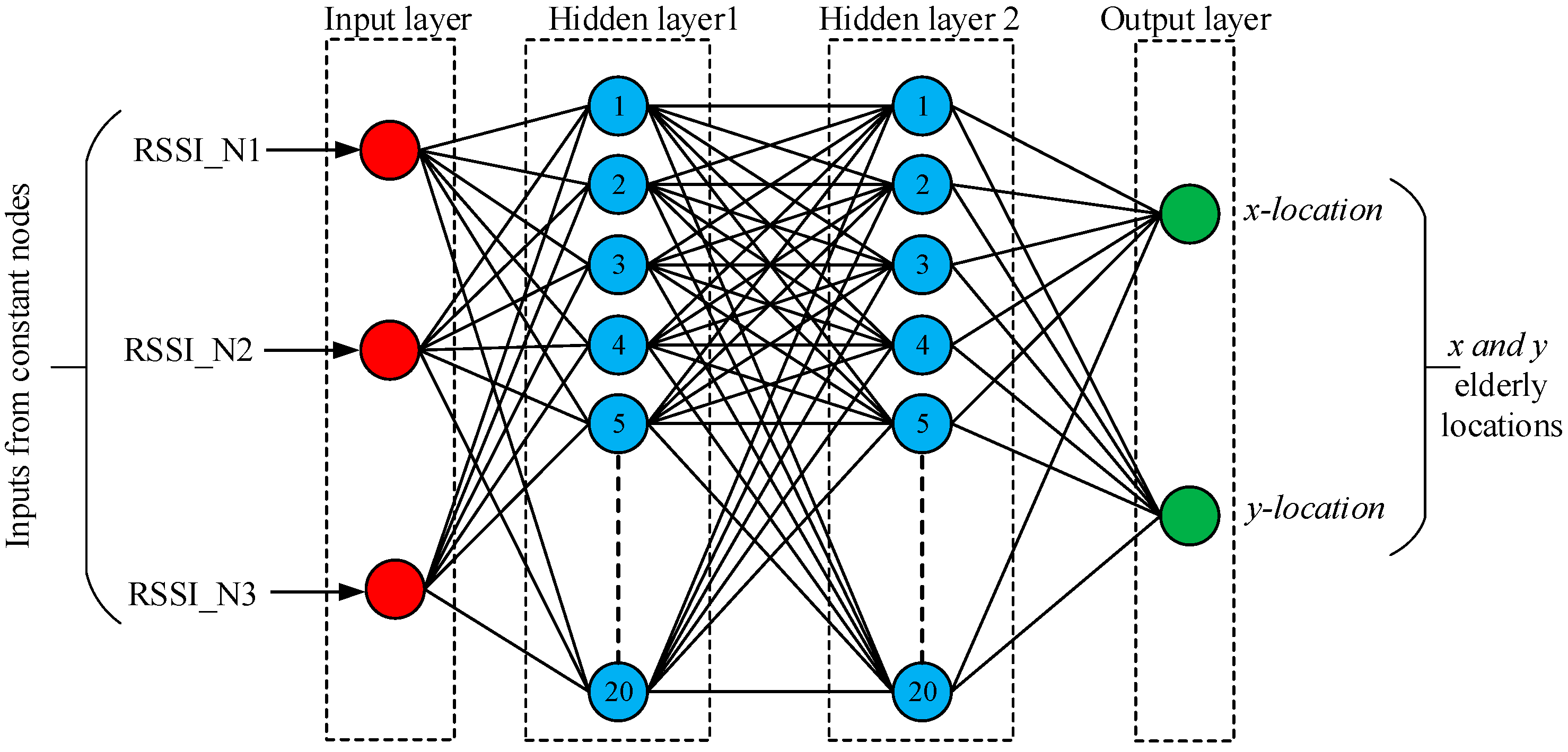
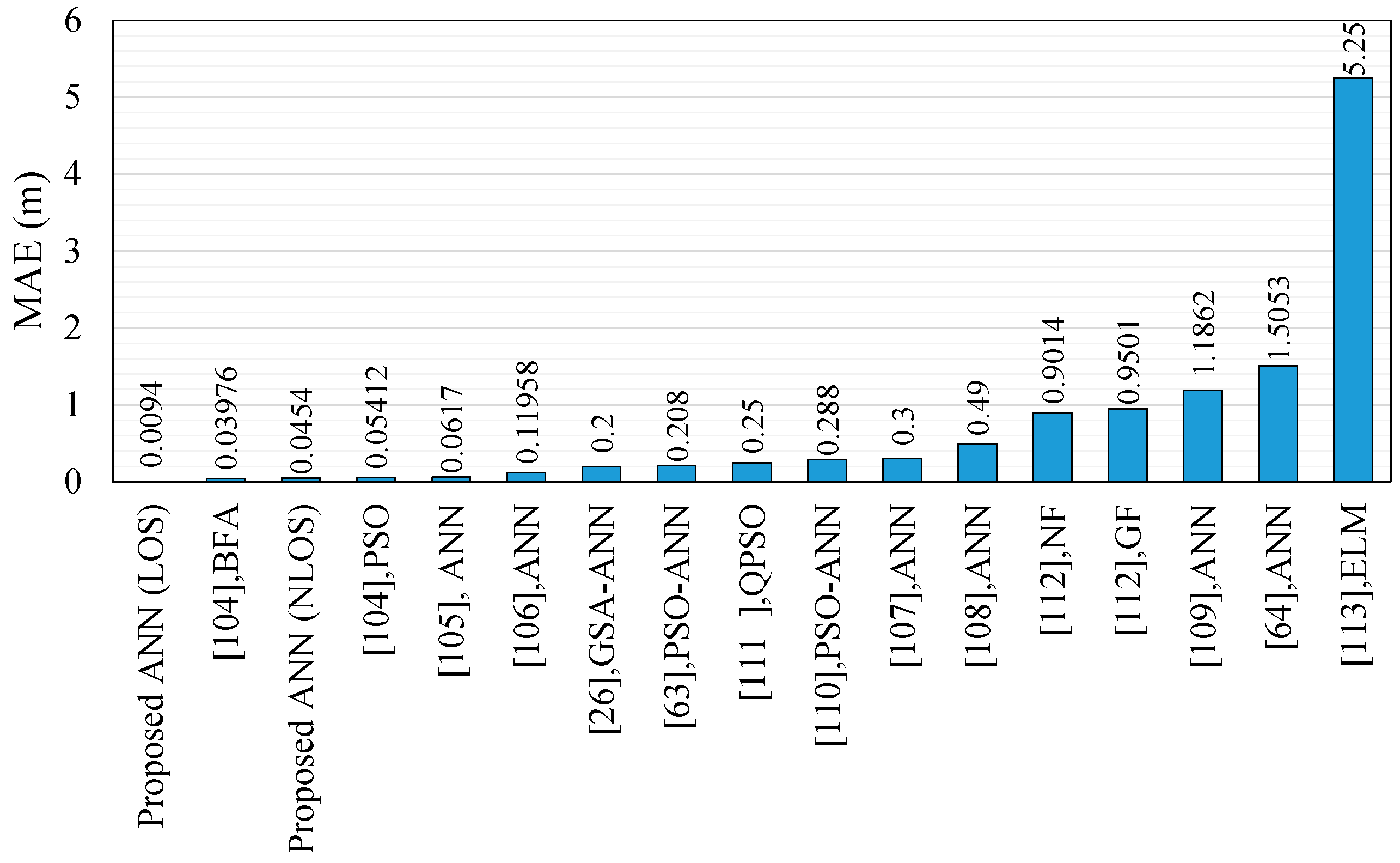
- The location of the fall is determined with minimum localization error based on ANN technique in indoor environments for LOS and NLOS scenarios.
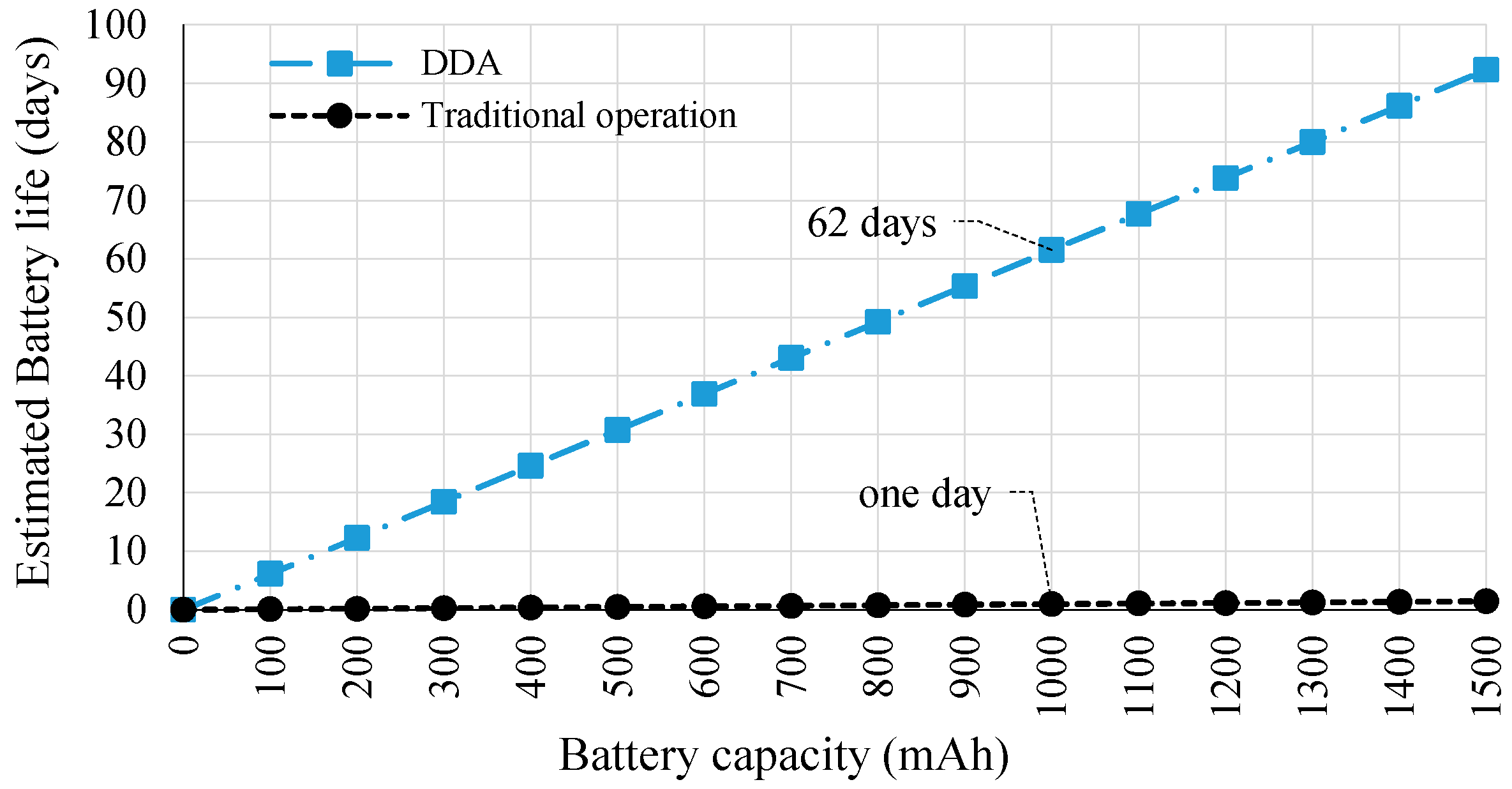
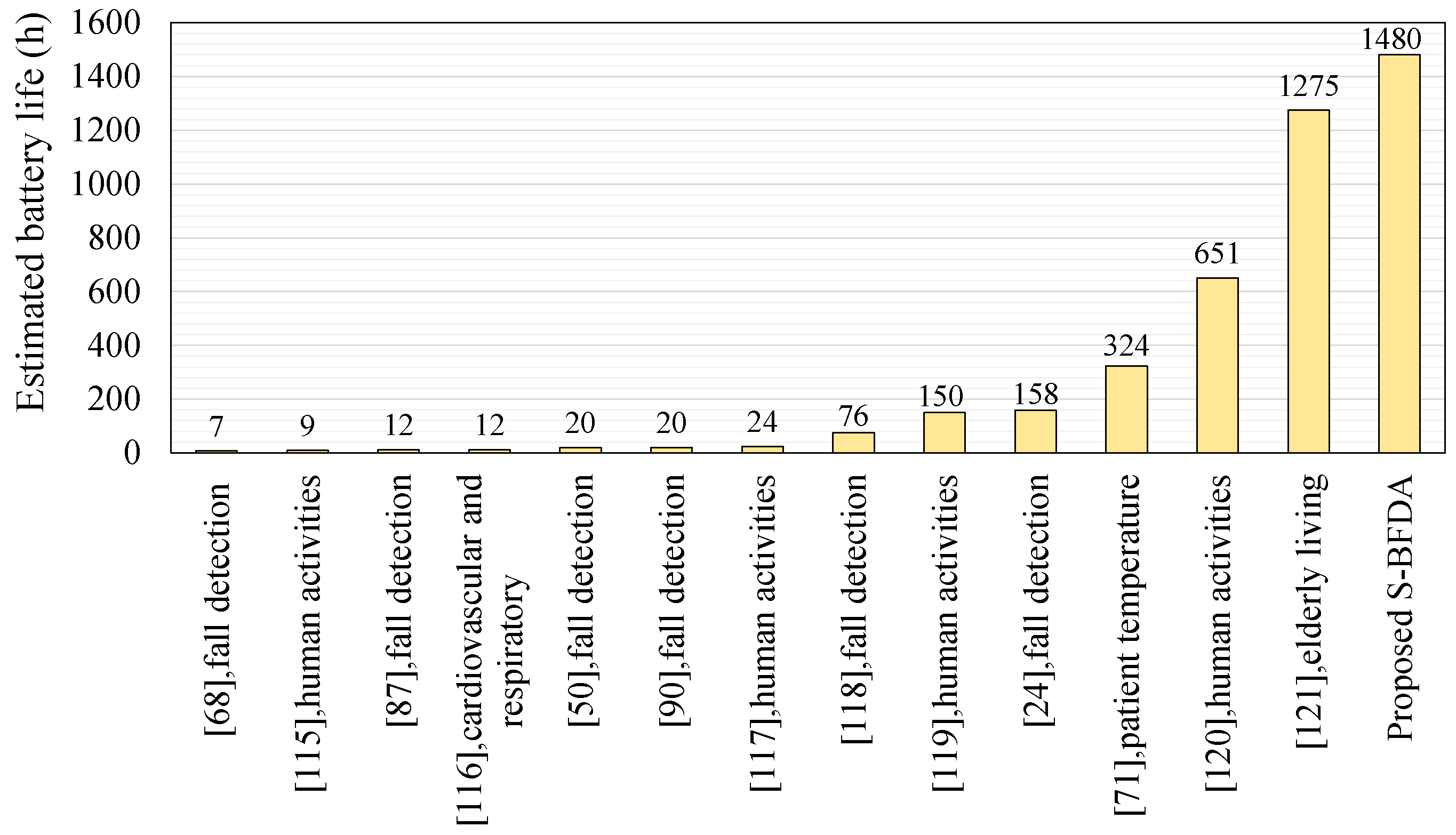
- The power consumption of the FDS carried by the subject is minimized based on DDA.
- Fall detection accuracy achieved using sensor-based fall detection algorithm (S-BFDA), localization error based on ANN technique, and FDS power consumption based on DDA are compared with those of state-of-the-art systems.
2. Related Works
3. Methodology
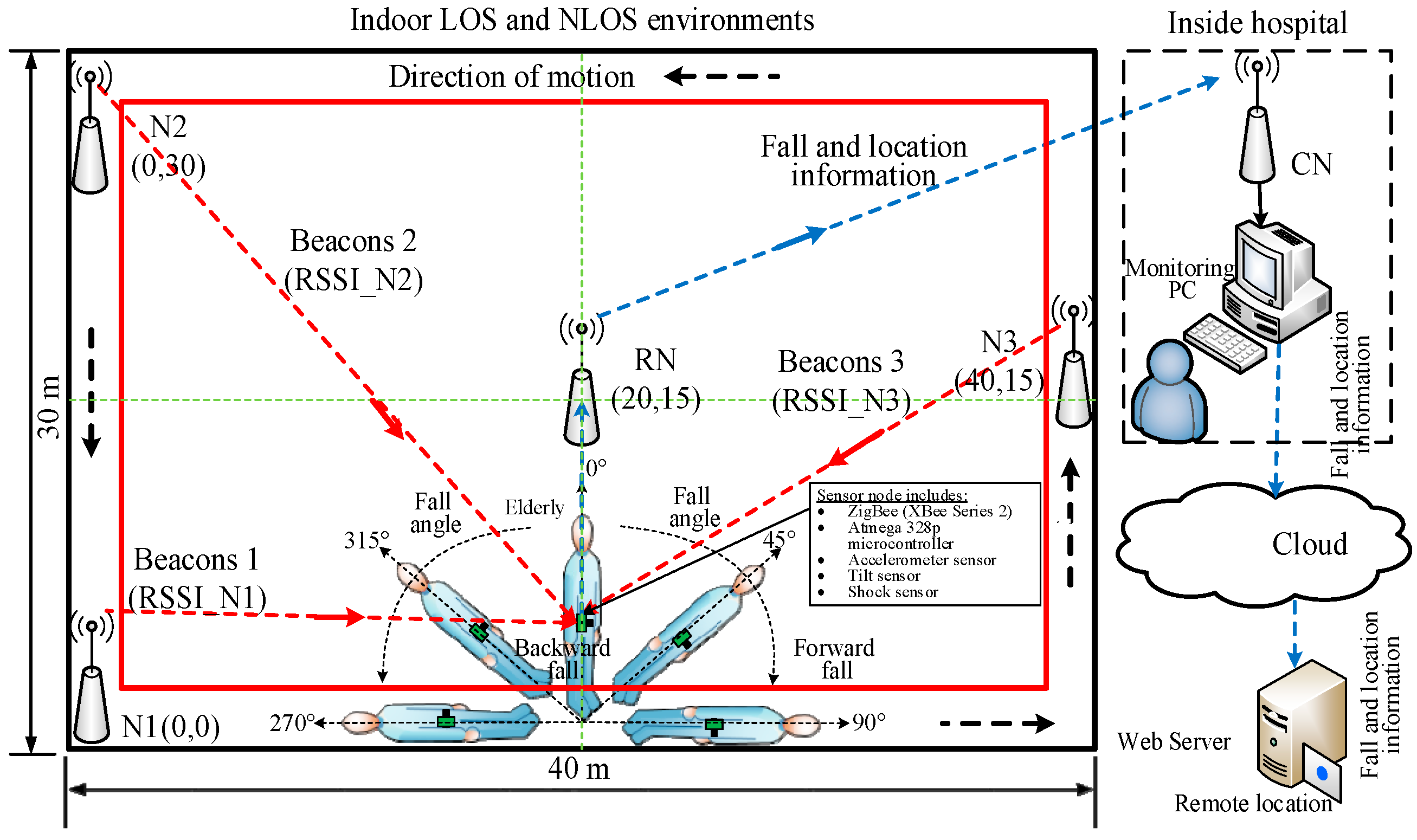
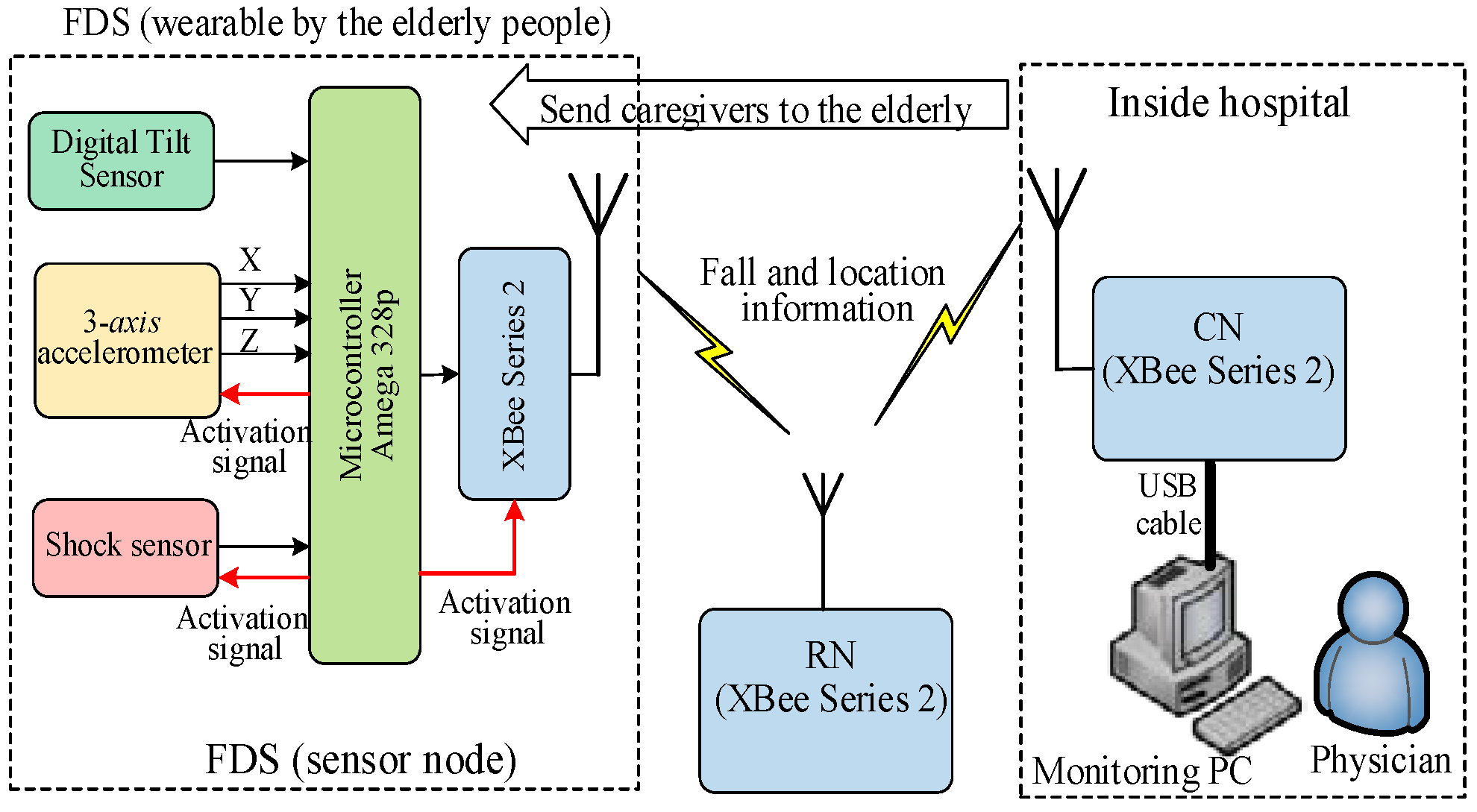
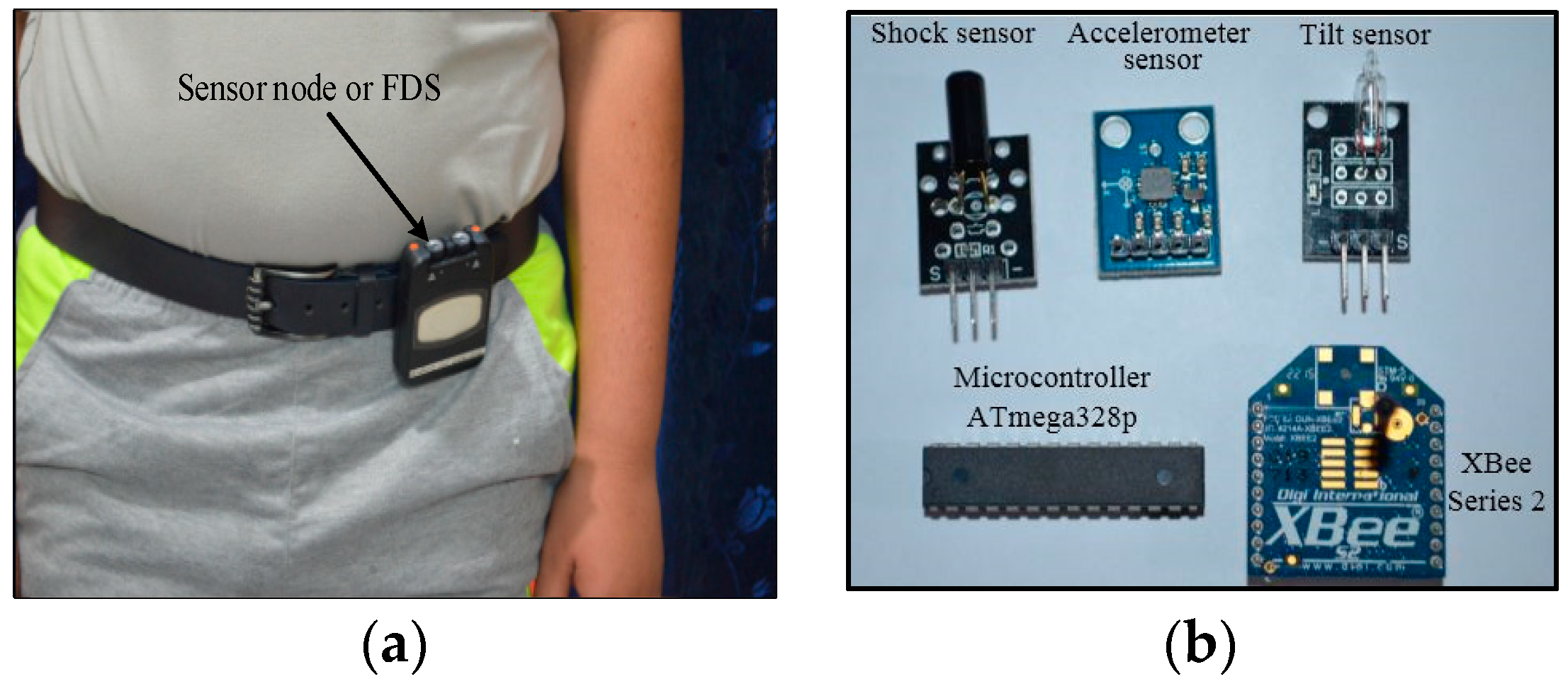
3.1. Wireless Sensor Network for Elderly Fall Detection
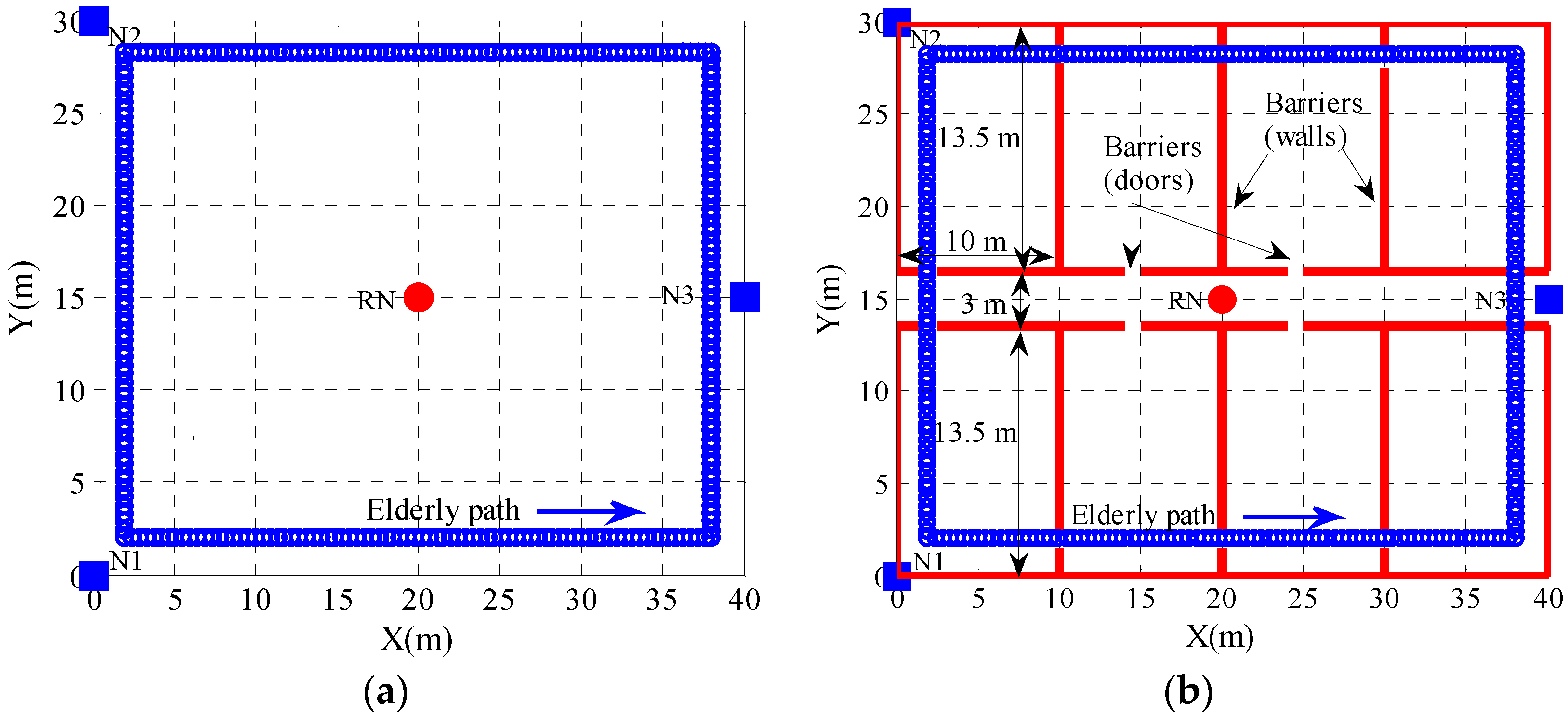
3.2. Indoor Environment
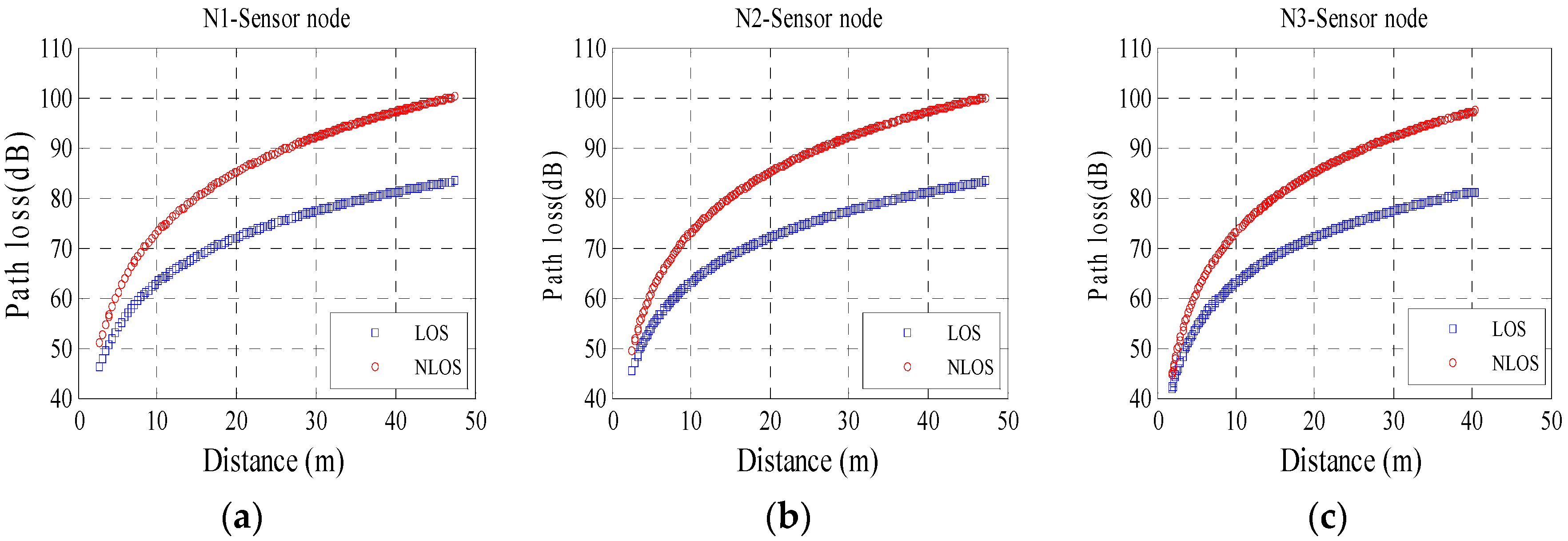
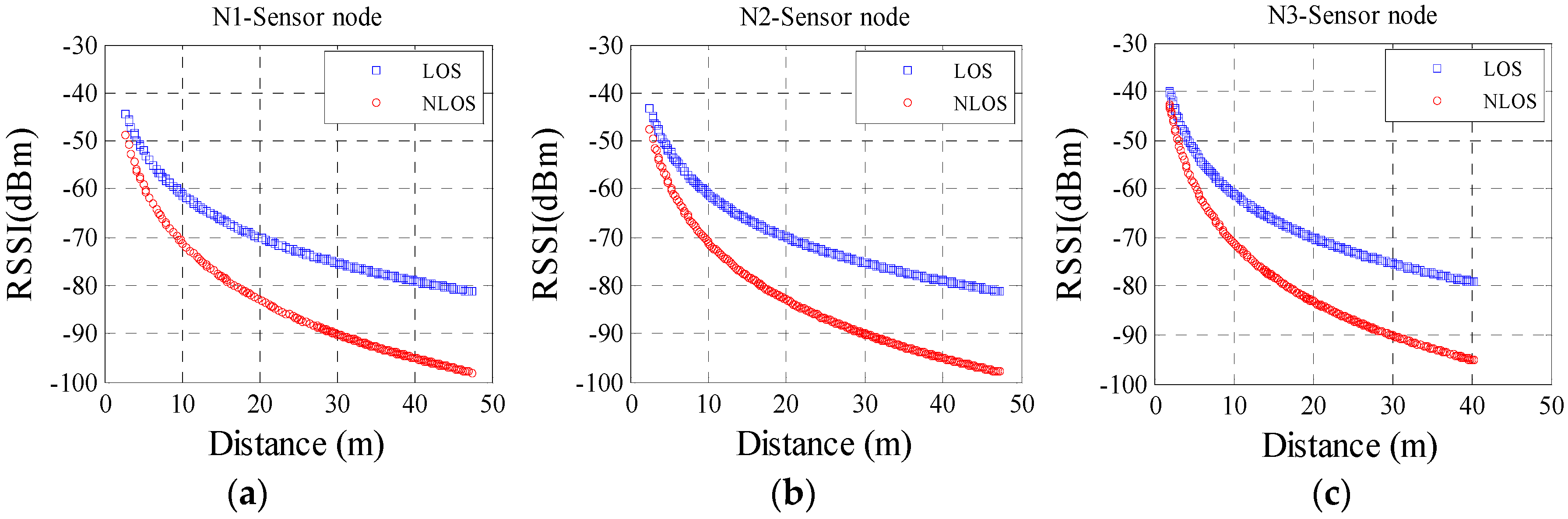
3.3. RSSI Generation
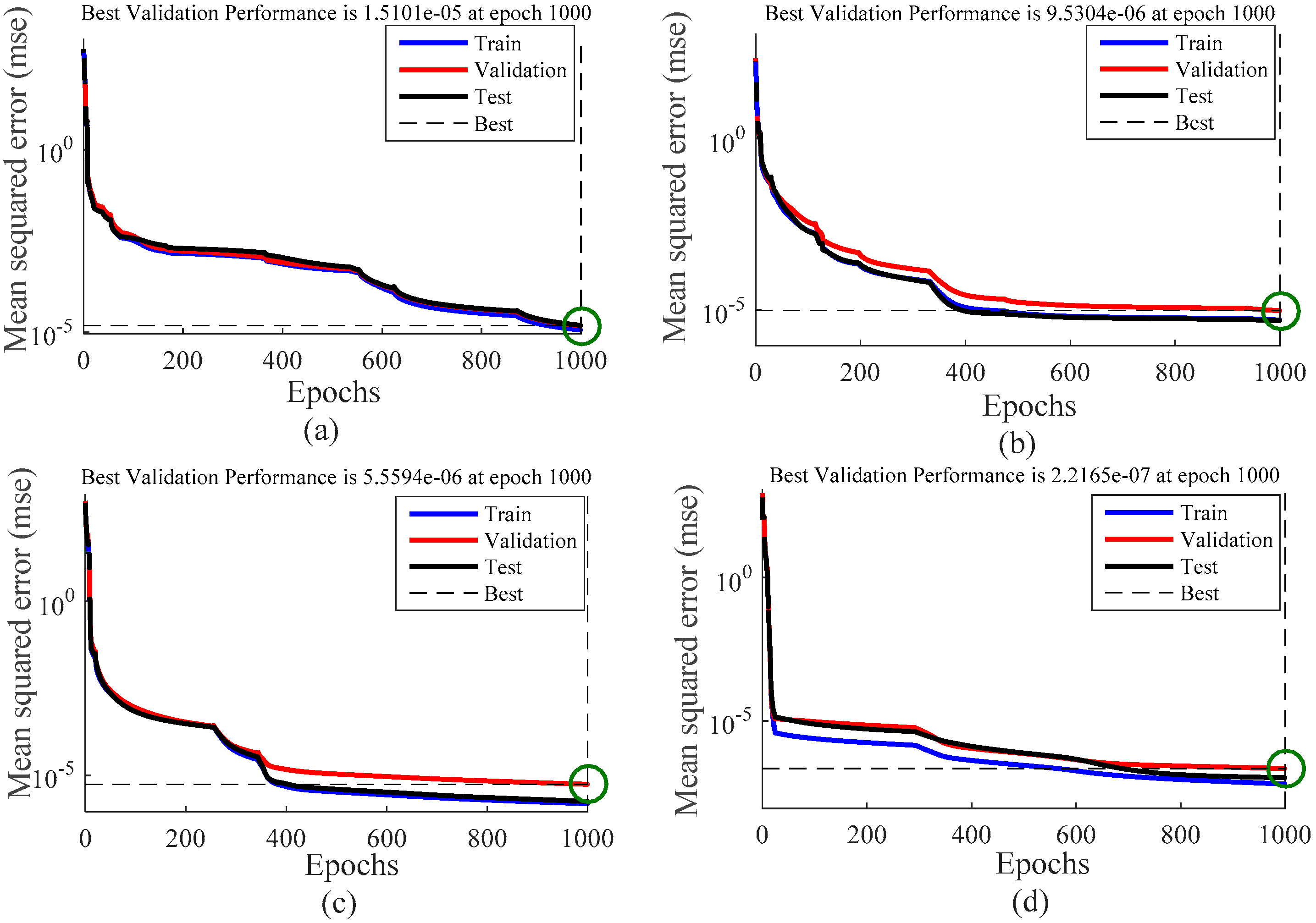
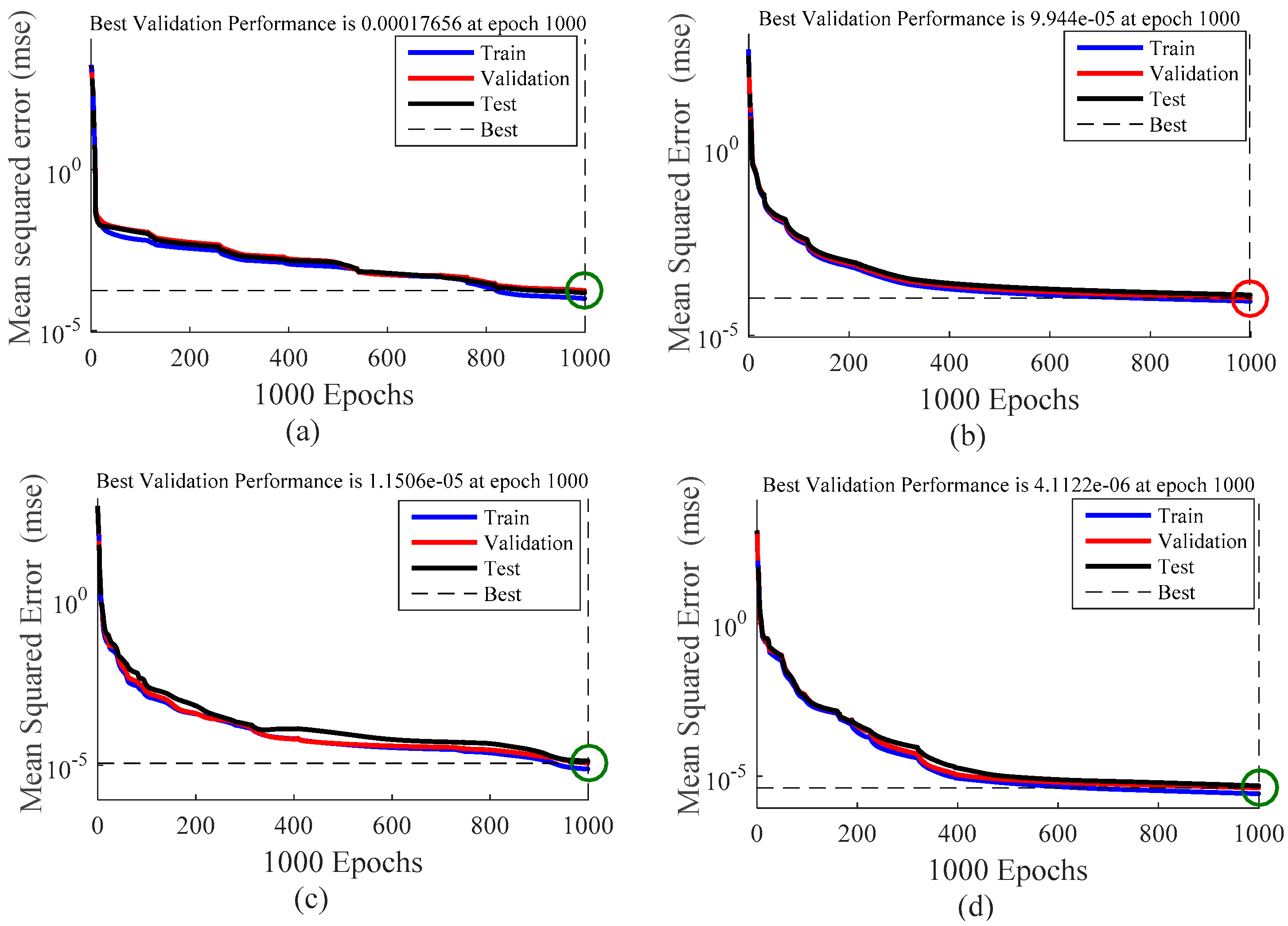
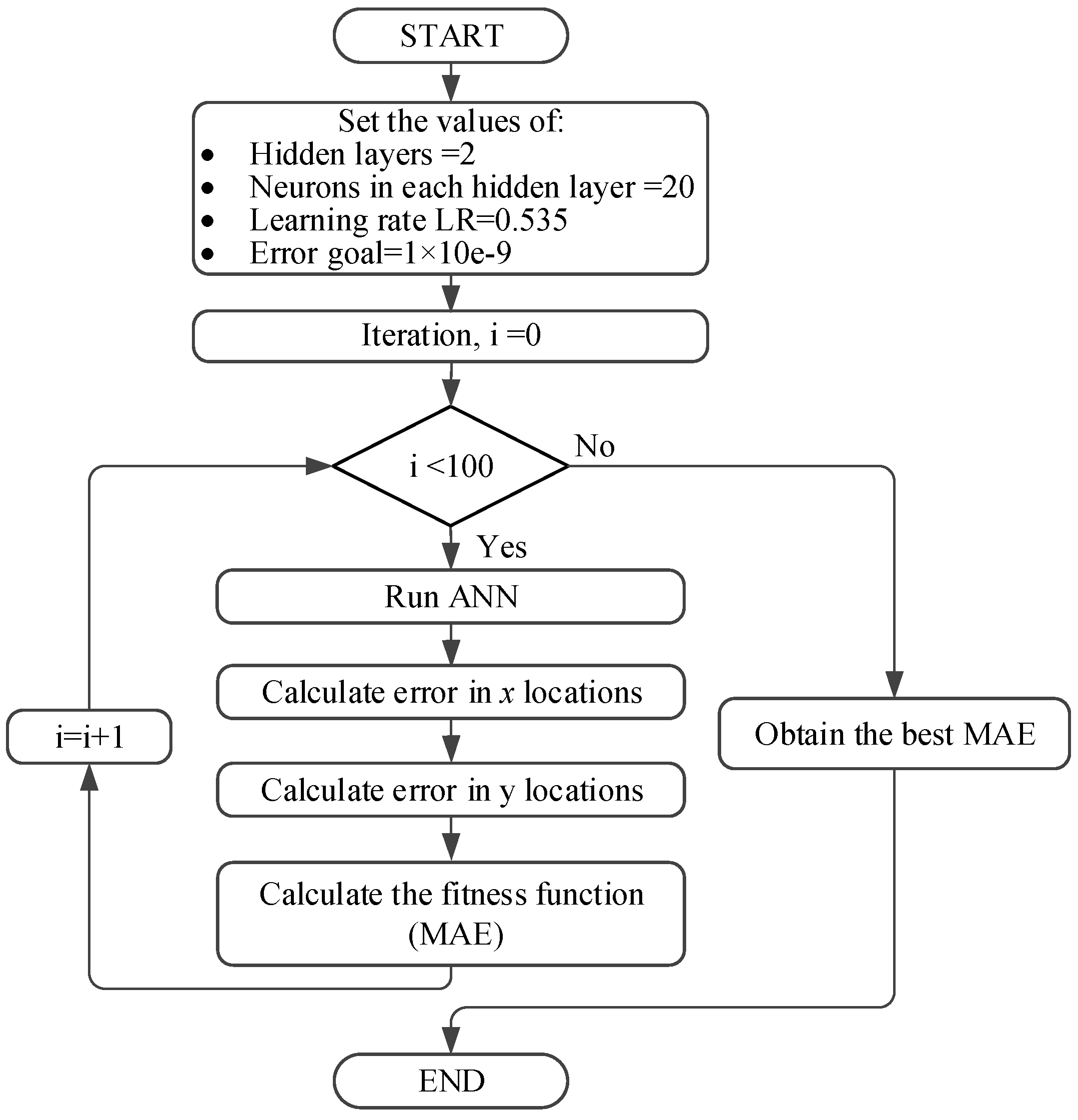
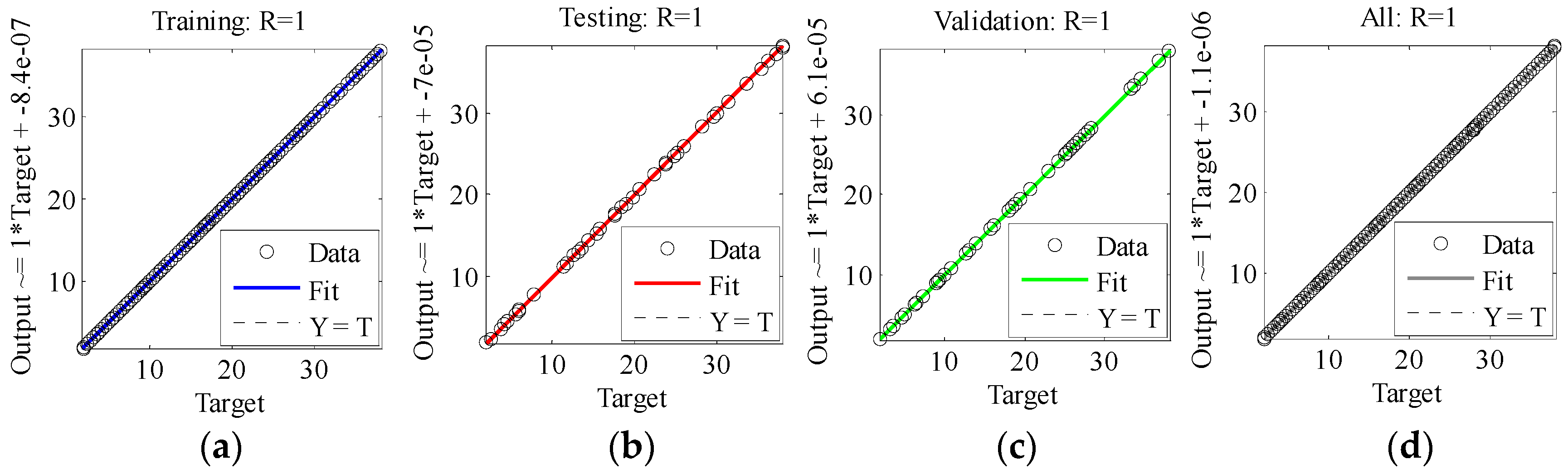
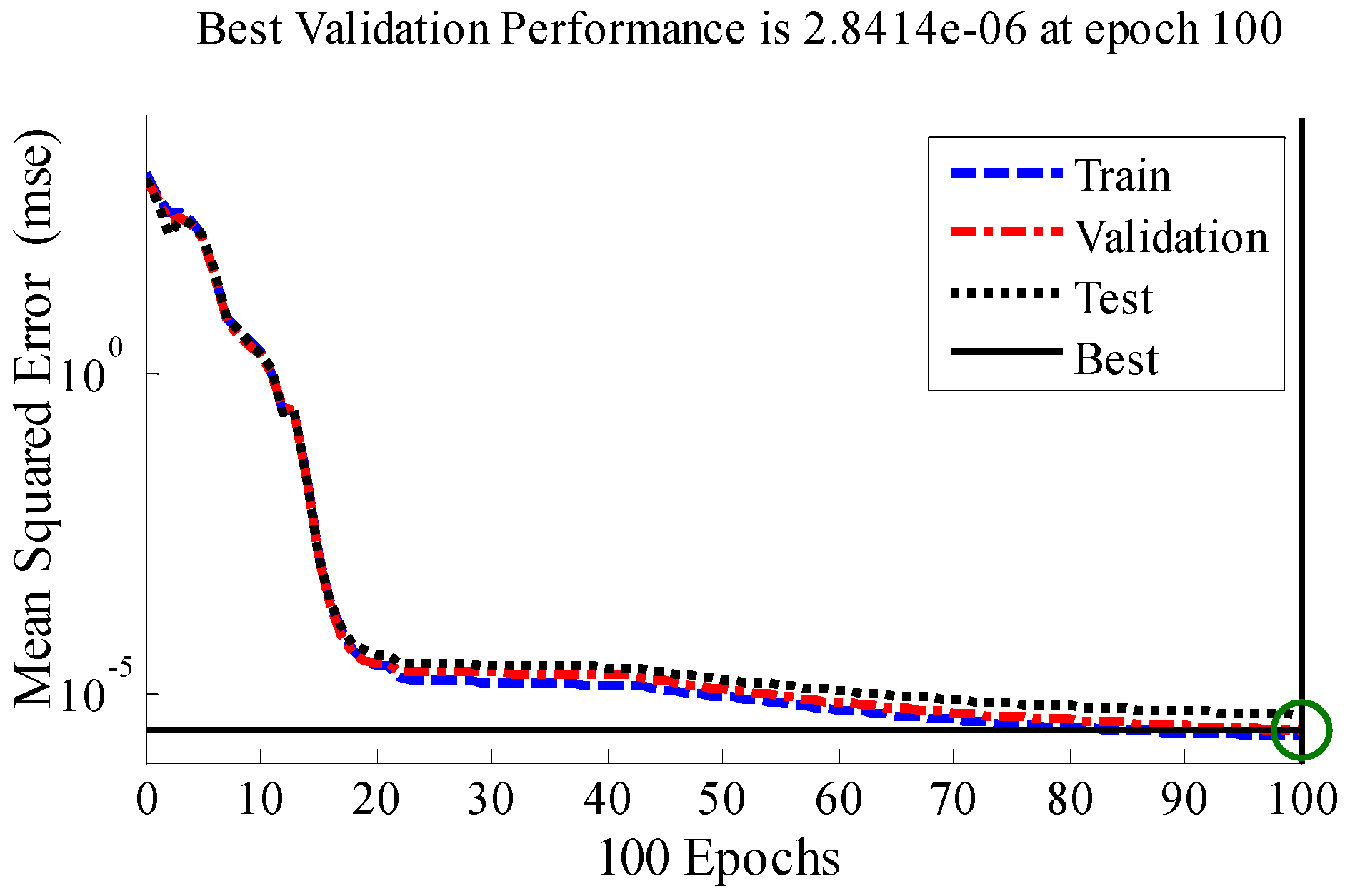
3.4. Localization Technique
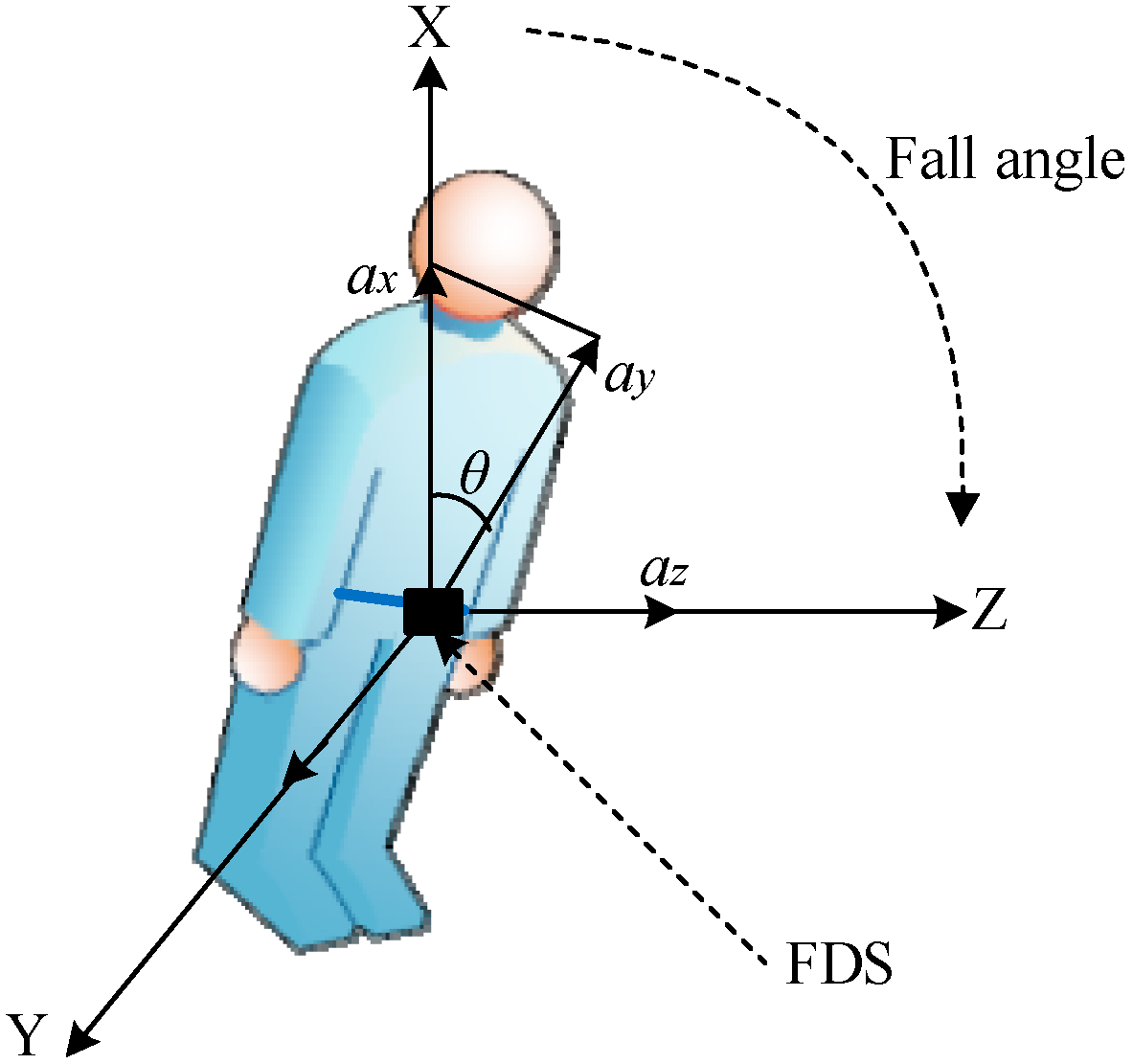
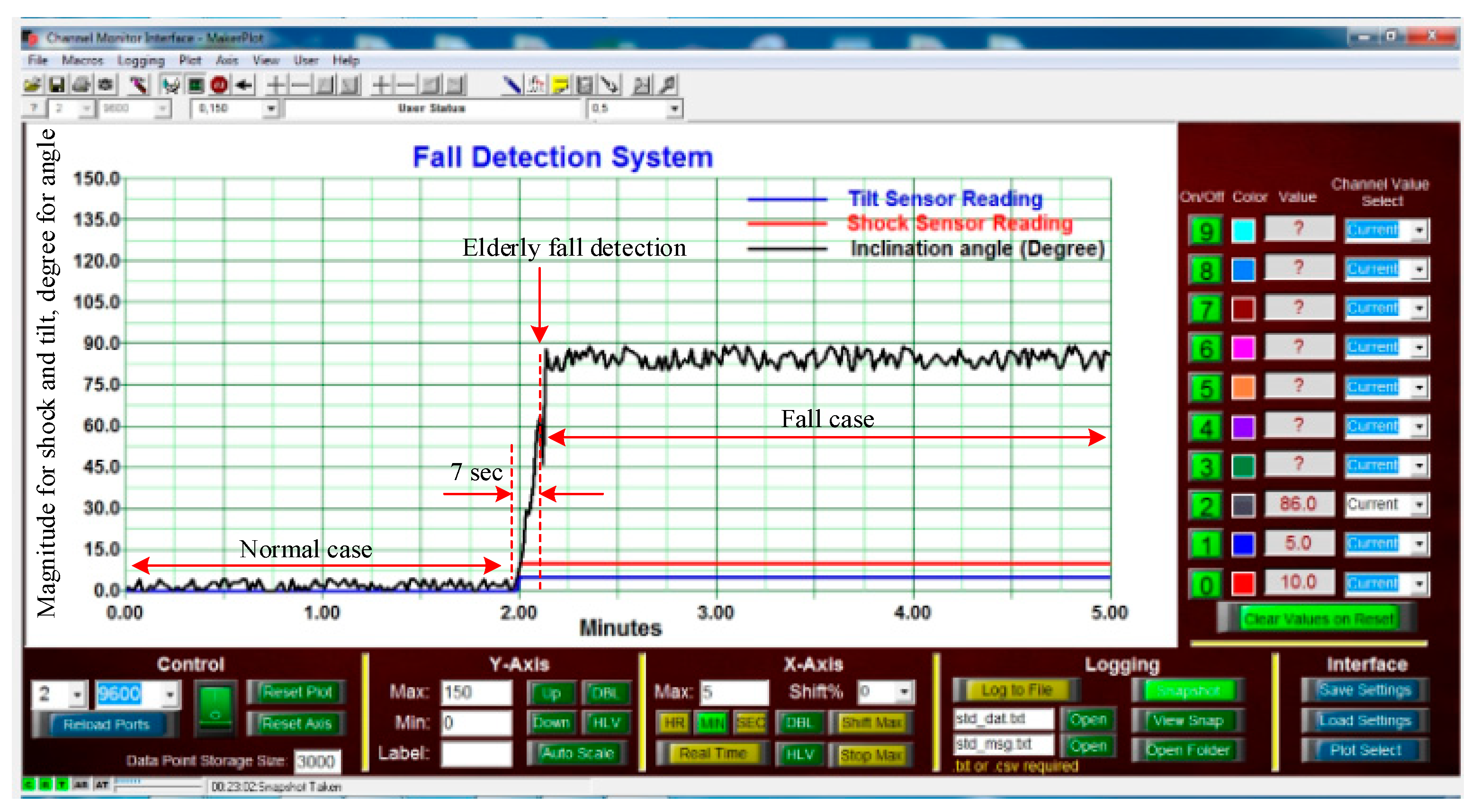
3.5. Fall Detection and Data-Driven Algorithm
 |
4. Power Consumption Analysis
5. Results and Discussions
5.1. Fall Detection Results
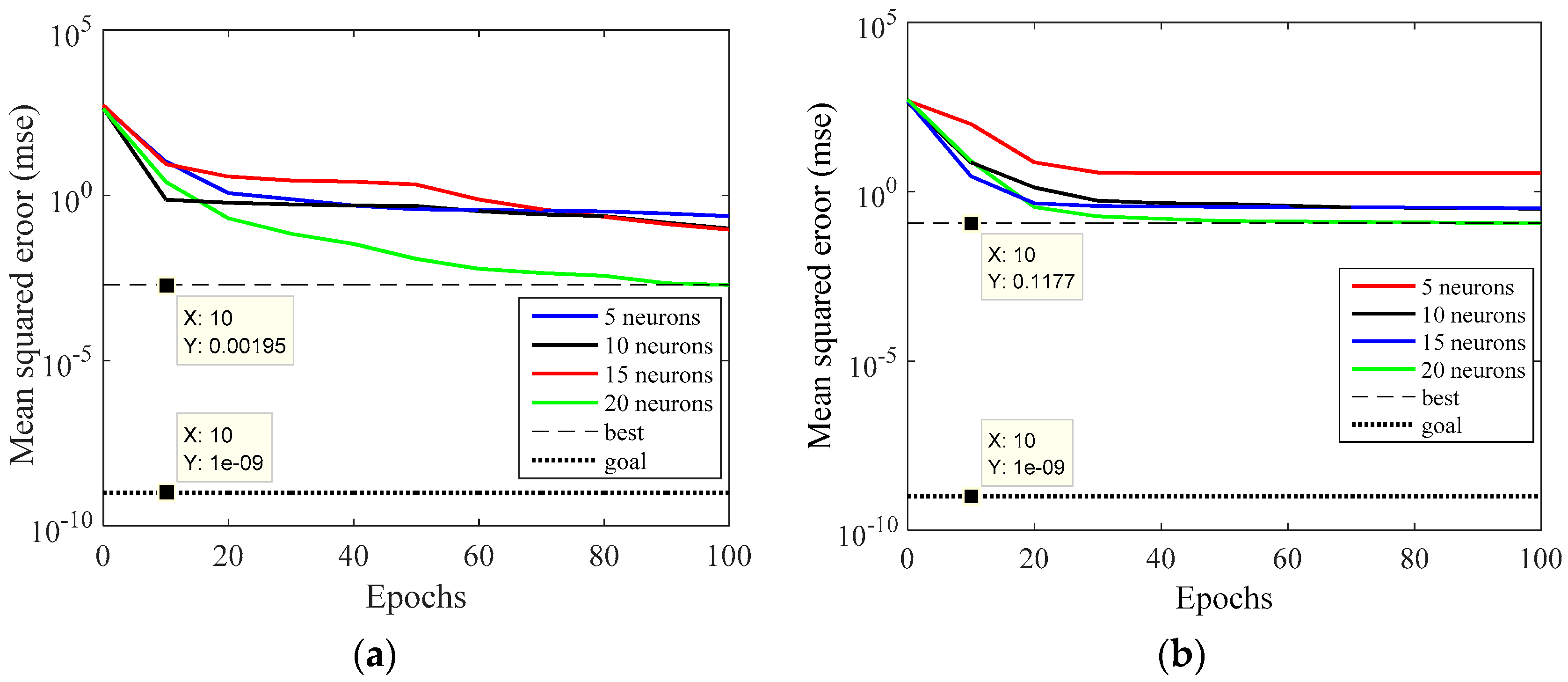
5.2. Elderly Localization Results
5.2.1. LOS Environment
5.2.2. NLOS Environment
5.3. Power Consumption Estimation Results
6. Comparison Results
6.1. Comparison of Fall Detection Accuracy
6.2. Comparison of Localization Errors
6.3. Power Consumption Comparison
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Amin, M.G.; Zhang, Y.D.; Ahmad, F.; Ho, K.D. Radar signal processing for elderly fall detection: The future for in-home monitoring. IEEE Signal Process. Mag. 2016, 33, 71–80. [Google Scholar] [CrossRef]
- Shinmoto Torres, R.L.; Visvanathan, R.; Hoskins, S.; van den Hengel, A.; Ranasinghe, D.C. Effectiveness of a batteryless and wireless wearable sensor system for identifying bed and chair exits in healthy older people. Sensors 2016, 16, 546. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.-C.; Chiu, Y.-W.; Chen, C.-H.; Chen, E.-J. Implementation of fall detection and localized caring system. Math. Probl. Eng. 2013, 2013, 217286. [Google Scholar] [CrossRef]
- Naranjo, P.G.V.; Shojafar, M.; Mostafaei, H.; Pooranian, Z.; Baccarelli, E. P-sep: A prolong stable election routing algorithm for energy-limited heterogeneous fog-supported wireless sensor networks. J. Supercomput. 2017, 73, 733–755. [Google Scholar] [CrossRef]
- Saleh, N.; Kassem, A.; Haidar, A.M. Energy-efficient architecture for wireless sensor networks in healthcare applications. IEEE Access 2018, 6, 6478–6486. [Google Scholar] [CrossRef]
- Naranjo, P.G.V.; Pooranian, Z.; Shojafar, M.; Conti, M.; Buyya, R. Focan: A fog-supported smart city network architecture for management of applications in the internet of everything environments. J. Parallel Distrib. Comput. 2018. [Google Scholar] [CrossRef]
- Shojafar, M.; Pooranian, Z.; Naranjo, P.G.V.; Baccarelli, E. Flaps: Bandwidth and delay-efficient distributed data searching in fog-supported p2p content delivery networks. J. Supercomput. 2017, 73, 5239–5260. [Google Scholar] [CrossRef]
- Yang, L.; Ren, Y.; Zhang, W. 3D depth image analysis for indoor fall detection of elderly people. Digit. Commun. Netw. 2016, 2, 24–34. [Google Scholar] [CrossRef]
- Yang, L.; Ren, Y.; Hu, H.; Tian, B. New fast fall detection method based on spatio-temporal context tracking of head by using depth images. Sensors 2015, 15, 23004. [Google Scholar] [CrossRef] [PubMed]
- Diraco, G.; Leone, A.; Siciliano, P. An active vision system for fall detection and posture recognition in elderly healthcare. In Proceedings of the Conference on Design, Automation and Test in Europe, Dresden, Germany, 8–12 March 2010; European Design and Automation Association: Leuven, Belgium, 2010; pp. 1536–1541. [Google Scholar]
- Delahoz, Y.; Labrador, M. Survey on fall detection and fall prevention using wearable and external sensors. Sensors 2014, 14, 19806–19842. [Google Scholar] [CrossRef] [PubMed]
- Mubashir, M.; Shao, L.; Seed, L. A survey on fall detection: Principles and approaches. Neurocomputing 2013, 100, 144–152. [Google Scholar] [CrossRef]
- Sorvala, A.; Alasaarela, E.; Sorvoja, H.; Myllylä, R. A two-threshold fall detection algorithm for reducing false alarms. In Proceedings of the IEEE 6th International Symposium on Medical Information and Communication Technology (ISMICT), La Jolla, CA, USA, 25–29 March 2012; pp. 1–4. [Google Scholar]
- Xu, Y.; Zhou, J.; Zhang, P. Rss-based source localization when path-loss model parameters are unknown. IEEE Commun. Lett. 2014, 18, 1055–1058. [Google Scholar] [CrossRef]
- Halder, S.J.; Giri, P.; Kim, W. Advanced smoothing approach of RSSI and LQI for indoor localization system. Int. J. Distrib. Sens. Netw. 2015, 11. [Google Scholar] [CrossRef]
- Mi, Q.; Stankovic, J.A.; Stoleru, R. Practical and secure localization and key distribution for wireless sensor networks. Ad Hoc Netw. 2012, 10, 946–961. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, Y.H.; Pan, Q. Distributed, robust acoustic source localization in a wireless sensor network. IEEE Trans. Signal Process. 2012, 60, 4350–4359. [Google Scholar] [CrossRef]
- López, J.D.; Ocampo, C.; Sucerquia, A.; Vargas-Bonilla, J.F. Analyzing multiple accelerometer configurations to detect falls and motion. In Proceedings of the VII Latin American Congress on Biomedical Engineering CLAIB 2016, Bucaramanga, Santander, Colombia, 26–28 October 2016; Torres, I., Bustamante, J., Sierra, D.A., Eds.; Springer: Singapore, 2017; pp. 169–172. [Google Scholar]
- Pal, A. Localization algorithms in wireless sensor networks: Current approaches and future challenges. Netw. Protoc. Algorithms 2010, 2, 45–73. [Google Scholar] [CrossRef]
- El Assaf, A.; Zaidi, S.; Affes, S.; Kandil, N. Robust anns-based wsn localization in the presence of anisotropic signal attenuation. IEEE Wirel. Commun. Lett. 2016, 5, 504–507. [Google Scholar] [CrossRef]
- Gharghan, S.K.; Nordin, R.; Ismail, M. Energy efficiency of ultra-low-power bicycle wireless sensor networks based on a combination of power reduction techniques. J. Sens. 2016, 2016, 7314207. [Google Scholar] [CrossRef]
- Wang, C.; Lu, W.; Narayanan, M.R.; Redmond, S.J.; Lovell, N.H. Low-power technologies for wearable telecare and telehealth systems: A review. Biomed. Eng. Lett. 2015, 5, 1–9. [Google Scholar] [CrossRef]
- Panhwar, M.; Shah, S.M.S.; Shah, S.M.Z.S.; Shah, S.M.A.; Chowdhry, B.S. Smart phone based fall detection using auto regression modeling in a non-restrictive setting. Indian J. Sci. Technol. 2017, 10. [Google Scholar] [CrossRef]
- Benocci, M.; Tacconi, C.; Farella, E.; Benini, L.; Chiari, L.; Vanzago, L. Accelerometer-based fall detection using optimized zigbee data streaming. Microelectron. J. 2010, 41, 703–710. [Google Scholar] [CrossRef]
- Wang, L.-H.; Hsiao, Y.-M.; Xie, X.-Q.; Lee, S.-Y. An outdoor intelligent healthcare monitoring device for the elderly. IEEE Trans. Consum. Electron. 2016, 62, 128–135. [Google Scholar] [CrossRef]
- Gharghan, S.K.; Nordin, R.; Ismail, M. A wireless sensor network with soft computing localization techniques for track cycling applications. Sensors 2016, 16, 1043. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Chen, X.; Shen, M. A framework for daily activity monitoring and fall detection based on surface electromyography and accelerometer signals. IEEE J. Biomed. Health Inform. 2013, 17, 38–45. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.-K.; Kao, T.; Chan, C.-T.; Huang, C.-N.; Chiang, C.-Y.; Lai, C.-Y.; Tung, T.-H.; Wang, P.-C. A reliable transmission protocol for zigbee-based wireless patient monitoring. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 6–16. [Google Scholar] [CrossRef] [PubMed]
- Özdemir, A.T.; Barshan, B. Detecting falls with wearable sensors using machine learning techniques. Sensors 2014, 14, 10691–10708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Felisberto, F.; Laza, R.; Fdez-Riverola, F.; Pereira, A. A distributed multiagent system architecture for body area networks applied to healthcare monitoring. BioMed Res. Int. 2015, 2015, 192454. [Google Scholar] [CrossRef] [PubMed]
- Rescio, G.; Leone, A.; Siciliano, P. Supervised expert system for wearable mems accelerometer-based fall detector. J. Sens. 2013, 2013, 254629. [Google Scholar] [CrossRef]
- Lim, D.; Park, C.; Kim, N.H.; Kim, S.-H.; Yu, Y.S. Fall-detection algorithm using 3-axis acceleration: Combination with simple threshold and hidden markov model. J. Appl. Math. 2014, 2014, 896030. [Google Scholar] [CrossRef]
- Özdemir, A.T. An analysis on sensor locations of the human body for wearable fall detection devices: Principles and practice. Sensors 2016, 16, 1161. [Google Scholar] [CrossRef] [PubMed]
- Charlon, Y.; Fourty, N.; Bourennane, W.; Campo, E. Design and evaluation of a device worn for fall detection and localization: Application for the continuous monitoring of risks incurred by dependents in an alzheimer’s care unit. Expert Syst. Appl. 2013, 40, 7316–7330. [Google Scholar] [CrossRef]
- He, J.; Hu, C.; Wang, X. A smart device enabled system for autonomous fall detection and alert. Int. J. Distrib. Sens. Netw. 2016, 2016. [Google Scholar] [CrossRef]
- Panicker, N.V.; Kumar, A.S. Tablet pc enabled body sensor system for rural telehealth applications. Int. J. Telemed. Appl. 2016, 2016. [Google Scholar] [CrossRef] [PubMed]
- Oporto, E.; Vilcahuaman, L. Fall detection system for elderly by MEMS accelerometer and SMS alert. In Proceedings of the VII Latin American Congress on Biomedical Engineering CLAIB 2016, Bucaramanga, Santander, Colombia, 26–28 October 2016; Springer: Singapore, 2017; pp. 114–117. [Google Scholar]
- Huynh, Q.T.; Nguyen, U.D.; Irazabal, L.B.; Ghassemian, N.; Tran, B.Q. Optimization of an accelerometer and gyroscope-based fall detection algorithm. J. Sens. 2015, 2015, 452078. [Google Scholar] [CrossRef]
- Majumder, A. Development of a Wireless Mobile Computing Platform for Fall Risk Prediction. Ph.D. Thesis, Marquette University, Milwaukee, WI, USA, 2016. [Google Scholar]
- Luque, R.; Casilari, E.; Morón, M.-J.; Redondo, G. Comparison and characterization of android-based fall detection systems. Sensors 2014, 14, 18543–18574. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Chen, Y.; Liu, J. Fall detecting and alarming based on mobile phone. In Proceedings of the 7th International Conference on Ubiquitous Intelligence & Computing and 7th International Conference on Autonomic & Trusted Computing (UIC/ATC), Xi’an, China, 26–29 October 2010; pp. 494–497. [Google Scholar]
- Zhao, Z.; Chen, Y.; Wang, S.; Chen, Z. Fallalarm: Smart phone based fall detecting and positioning system. Procedia Comput. Sci. 2012, 10, 617–624. [Google Scholar] [CrossRef]
- Majumder, A.J.A.; Zerin, I.; Ahamed, S.I.; Smith, R.O. A multi-sensor approach for fall risk prediction and prevention in elderly. ACM SIGAPP Appl. Comput. Rev. 2014, 14, 41–52. [Google Scholar] [CrossRef]
- Dai, J.; Bai, X.; Yang, Z.; Shen, Z.; Xuan, D. Mobile phone-based pervasive fall detection. Pers. Ubiquitous Comput. 2010, 14, 633–643. [Google Scholar] [CrossRef]
- Habib, M.A.; Mohktar, M.S.; Kamaruzzaman, S.B.; Lim, K.S.; Pin, T.M.; Ibrahim, F. Smartphone-based solutions for fall detection and prevention: Challenges and open issues. Sensors 2014, 14, 7181–7208. [Google Scholar] [CrossRef] [PubMed]
- Mellone, S.; Tacconi, C.; Schwickert, L.; Klenk, J.; Becker, C.; Chiari, L. Smartphone-based solutions for fall detection and prevention: The farseeing approach. Z. Gerontol. Geriatr. 2012, 45, 722–727. [Google Scholar] [CrossRef] [PubMed]
- Abbate, S.; Avvenuti, M.; Bonatesta, F.; Cola, G.; Corsini, P.; Vecchio, A. A smartphone-based fall detection system. Pervasive Mob. Comput. 2012, 8, 883–899. [Google Scholar] [CrossRef]
- Medrano, C.; Plaza, I.; Igual, R.; Sánchez, Á.; Castro, M. The effect of personalization on smartphone-based fall detectors. Sensors 2016, 16, 117. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.-N.; Chan, C.-T. Zigbee-based indoor location system by k-nearest neighbor algorithm with weighted rssi. Procedia Comput. Sci. 2011, 5, 58–65. [Google Scholar] [CrossRef]
- Wu, F.; Zhao, H.; Zhao, Y.; Zhong, H. Development of a wearable-sensor-based fall detection system. Int. J. Telemed. Appl. 2015, 2015. [Google Scholar] [CrossRef] [PubMed]
- Bian, Z.-P.; Hou, J.; Chau, L.-P.; Magnenat-Thalmann, N. Fall detection based on body part tracking using a depth camera. IEEE J. Biomed. Health Inform. 2015, 19, 430–439. [Google Scholar] [CrossRef] [PubMed]
- Yu, M.; Yu, Y.; Rhuma, A.; Naqvi, S.M.R.; Wang, L.; Chambers, J.A. An online one class support vector machine-based person-specific fall detection system for monitoring an elderly individual in a room environment. IEEE J. Biomed. Health Inform. 2013, 17, 1002–1014. [Google Scholar] [PubMed]
- Ozcan, K.; Mahabalagiri, A.K.; Casares, M.; Velipasalar, S. Automatic fall detection and activity classification by a wearable embedded smart camera. IEEE J. Emerg. Sel. Top. Circuits Syst. 2013, 3, 125–136. [Google Scholar] [CrossRef]
- Su, B.Y.; Ho, K.; Rantz, M.J.; Skubic, M. Doppler radar fall activity detection using the wavelet transform. IEEE Trans. Biomed. Eng. 2015, 62, 865–875. [Google Scholar] [CrossRef] [PubMed]
- Sachs, J.; Herrmann, R. M-sequence-based ultra-wideband sensor network for vitality monitoring of elders at home. IET Radar Sonar Navig. 2015, 9, 125–137. [Google Scholar] [CrossRef] [Green Version]
- Garripoli, C.; Mercuri, M.; Karsmakers, P.; Soh, P.J.; Crupi, G.; Vandenbosch, G.A.; Pace, C.; Leroux, P.; Schreurs, D. Embedded dsp-based telehealth radar system for remote in-door fall detection. IEEE J. Biomed. Health Inform. 2015, 19, 92–101. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Caballero, A.; Sokolova, M.V.; Serrano-Cuerda, J. Lateral inhibition in accumulative computation and fuzzy sets for human fall pattern recognition in colour and infrared imagery. Sci. World J. 2013, 2013, 935026. [Google Scholar] [CrossRef] [PubMed]
- Ndzi, D.L.; Harun, A.; Ramli, F.M.; Kamarudin, M.L.; Zakaria, A.; Shakaff, A.Y.M.; Jaafar, M.N.; Zhou, S.; Farook, R.S. Wireless sensor network coverage measurement and planning in mixed crop farming. Comput. Electron. Agric. 2014, 105, 83–94. [Google Scholar] [CrossRef] [Green Version]
- Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Jawad, A.M.; Ismail, M. Energy-efficient wireless sensor networks for precision agriculture: A review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Liu, W.; Lang, F.; Zhang, Y.; Wang, C. Distance measurement model based on RSSI in WSN. Wirel. Sens. Netw. 2010, 2, 606. [Google Scholar] [CrossRef]
- Sahu, P.K.; Wu, E.H.-K.; Sahoo, J. Durt: Dual RSSI trend based localization for wireless sensor networks. IEEE Sens. J. 2013, 13, 3115–3123. [Google Scholar] [CrossRef]
- Cotuk, H.; Bicakci, K.; Tavli, B.; Uzun, E. The impact of transmission power control strategies on lifetime of wireless sensor networks. IEEE Trans. Comput. 2014, 63, 2866–2879. [Google Scholar] [CrossRef]
- Gharghan, S.K.; Nordin, R.; Ismail, M.; Ali, J.A. Accurate wireless sensor localization technique based on hybrid PSO-ANN algorithm for indoor and outdoor track cycling. IEEE Sens. J. 2016, 16, 529–541. [Google Scholar] [CrossRef]
- Payal, A.; Rai, C.S.; Reddy, B.R. Analysis of some feedforward artificial neural network training algorithms for developing localization framework in wireless sensor networks. Wirel. Pers. Commun. 2015, 82, 2519–2536. [Google Scholar] [CrossRef]
- Kukolj, D.; Levi, E. Identification of complex systems based on neural and takagi-sugeno fuzzy model. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 272–282. [Google Scholar] [CrossRef]
- Kumar, S.; Jeon, S.M.; Lee, S.R. Localization estimation using artificial intelligence technique in wireless sensor networks. J. Korea Inf. Commun. Soc. 2014, 39, 820–827. [Google Scholar]
- Aboelela, E.H.; Khan, A.H. Wireless sensors and neural networks for intruders detection and classification. In Proceedings of the International Conference on Information Networking (ICOIN), Bali, Indonesia, 1–3 February 2012; pp. 138–143. [Google Scholar]
- He, J.; Bai, S.; Wang, X. An unobtrusive fall detection and alerting system based on kalman filter and bayes network classifier. Sensors 2017, 17, 1393. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Lu, W.; Narayanan, M.R.; Chang, D.C.W.; Lord, S.R.; Redmond, S.J.; Lovell, N.H. Low-power fall detector using triaxial accelerometry and barometric pressure sensing. IEEE Trans. Ind. Inform. 2016, 12, 2302–2311. [Google Scholar] [CrossRef]
- Gharghan, S.K.; Nordin, R.; Ismail, M. An ultra-low power wireless sensor network for bicycle torque performance measurements. Sensors 2015, 15, 11741. [Google Scholar] [CrossRef] [PubMed]
- Gharghan, S.K. Energy-efficient remote temperature monitoring system for patients based on GSM modem and microcontroller. J. Commun. 2017, 12, 433–442. [Google Scholar] [CrossRef]
- Data Acquisition and Graphical Plotting Software for Microcontrolles (Makerplot). Available online: http://www.makerplot.com (accessed on 3 March 2014).
- Aziz, O.; Klenk, J.; Schwickert, L.; Chiari, L.; Becker, C.; Park, E.J.; Mori, G.; Robinovitch, S.N. Validation of accuracy of SVM-based fall detection system using real-world fall and non-fall datasets. PLoS ONE 2017, 12, e0180318. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Zhang, D.; Wang, Y.; Ma, J.; Wang, Y.; Li, S. Rt-fall: A real-time and contactless fall detection system with commodity wifi devices. IEEE Trans. Mob. Comput. 2017, 16, 511–526. [Google Scholar] [CrossRef]
- Planinc, R.; Kampel, M. Robust fall detection by combining 3D data and fuzzy logic. In Computer Vision—ACCV 2012 Workshops: ACCV 2012 International Workshops, Daejeon, Korea, 5–6 November 2012, Revised Selected Papers, Part II; Park, J.-I., Kim, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 121–132. [Google Scholar]
- Huang, C.-N.; Chan, C.-T. A zigbee-based location-aware fall detection system for improving elderly telecare. Int. J. Environ. Res. Public Health 2014, 11, 4233–4248. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; McCullagh, P.; Zhang, J.; Yu, T. A smartphone based real-time daily activity monitoring system. Clust. Comput. 2014, 17, 711–721. [Google Scholar] [CrossRef]
- Zhao, K.; Jia, K.; Liu, P. Fall detection algorithm based on human posture recognition. In Advances in Intelligent Information Hiding and Multimedia Signal Processing: Proceeding of the Twelfth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Nov., 21–23, 2016, Kaohsiung, Taiwan, Volume 2; Pan, J.-S., Tsai, P.-W., Huang, H.-C., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 119–126. [Google Scholar]
- Chen, K.-H.; Yang, J.-J.; Jaw, F.-S. Accelerometer-based fall detection using feature extraction and support vector machine algorithms. Instrum. Sci. Technol. 2016, 44, 333–342. [Google Scholar] [CrossRef]
- Kwolek, B.; Kepski, M. Fuzzy inference-based fall detection using kinect and body-worn accelerometer. Appl. Soft Comput. 2016, 40, 305–318. [Google Scholar] [CrossRef]
- Gibson, R.M.; Amira, A.; Ramzan, N.; Casaseca-de-la-Higuera, P.; Pervez, Z. Multiple comparator classifier framework for accelerometer-based fall detection and diagnostic. Appl. Soft Comput. 2016, 39, 94–103. [Google Scholar] [CrossRef]
- Fang, Y.-C.; Dzeng, R.-J. Accelerometer-based fall-portent detection algorithm for construction tiling operation. Autom. Constr. 2017, 84, 214–230. [Google Scholar] [CrossRef]
- Wang, C.; Lee, S.; Ho, J.; Na, Y.; Min, S.D. Detection of optimal activity recognition algorithm for elderly using smartphone. In Advances in Computer Science and Ubiquitous Computing: CSA-CUTE2016; Park, J.J., Pan, Y., Yi, G., Loia, V., Eds.; Springer: Singapore, 2017; pp. 1013–1018. [Google Scholar]
- Hakim, A.; Huq, M.S.; Shanta, S.; Ibrahim, B.S.K.K. Smartphone based data mining for fall detection: Analysis and design. Procedia Comput. Sci. 2017, 105, 46–51. [Google Scholar] [CrossRef]
- Veeraputhiran, A.; Sankararajan, R. Feature based fall detection system for elders using compressed sensing in WVSN. Wirel. Netw. 2017. [Google Scholar] [CrossRef]
- Erol, B.; Amin, M.G.; Boashash, B. Range-doppler radar sensor fusion for fall detection. In Proceedings of the IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 819–824. [Google Scholar]
- Ngu, A.; Wu, Y.; Zare, H.; Polican, A.; Yarbrough, B.; Yao, L. Fall detection using smartwatch sensor data with accessor architecture. In Smart Health: International Conference, ICSH 2017, Hong Kong, China, June 26–27, 2017, Proceedings; Chen, H., Zeng, D.D., Karahanna, E., Bardhan, I., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 81–93. [Google Scholar]
- Alazrai, R.; Momani, M.; Daoud, M. Fall detection for elderly from partially observed depth-map video sequences based on view-invariant human activity representation. Appl. Sci. 2017, 7, 316. [Google Scholar] [CrossRef]
- Ozcan, K.; Velipasalar, S.; Varshney, P.K. Autonomous fall detection with wearable cameras by using relative entropy distance measure. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 31–39. [Google Scholar] [CrossRef]
- Di Rosa, M.; Hausdorff, J.M.; Stara, V.; Rossi, L.; Glynn, L.; Casey, M.; Burkard, S.; Cherubini, A. Concurrent validation of an index to estimate fall risk in community dwelling seniors through a wireless sensor insole system: A pilot study. Gait Posture 2017, 55, 6–11. [Google Scholar] [CrossRef] [PubMed]
- Nizam, Y.; Mohd, M.N.H.; Jamil, M.M.A. Human fall detection from depth images using position and velocity of subject. Procedia Comput. Sci. 2017, 105, 131–137. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. Wifall: Device-free fall detection by wireless networks. IEEE Trans. Mob. Comput. 2017, 16, 581–594. [Google Scholar] [CrossRef]
- Chen, K.-H.; Hsu, Y.-W.; Yang, J.-J.; Jaw, F.-S. Enhanced characterization of an accelerometer-based fall detection algorithm using a repository. Instrum. Sci. Technol. 2017, 45, 382–391. [Google Scholar] [CrossRef]
- Ismail, M.M.B.; Bchir, O. Automatic fall detection using membership based histogram descriptors. J. Comput. Sci. Technol. 2017, 32, 356–367. [Google Scholar] [CrossRef]
- Liu, H.; Guo, Y. A vision-based fall detection algorithm of human in indoor environment. In Proceedings of the Second International Conference on Photonics and Optical Engineering, Xi’an, China, 14–17 October 2016; SPIE: Bellingham, WA, USA, 2017; p. 6. [Google Scholar]
- Álvarez de la Concepción, M.Á.; Soria Morillo, L.M.; Álvarez García, J.A.; González-Abril, L. Mobile activity recognition and fall detection system for elderly people using ameva algorithm. Pervasive Mob. Comput. 2017, 34, 3–13. [Google Scholar] [CrossRef]
- de Quadros, T.; Lazzaretti, A.E.; Schneider, F.K. Development and evaluation of a method for fall detection based on a wrist-located device. In Proceedings of the VII Latin American Congress on Biomedical Engineering CLAIB 2016, Bucaramanga, Santander, Colombia, 26–28 October 2016; Torres, I., Bustamante, J., Sierra, D.A., Eds.; Springer: Singapore, 2017; pp. 256–259. [Google Scholar]
- Sucerquia, A.; López, J.; Vargas-Bonilla, J. Sisfall: A fall and movement dataset. Sensors 2017, 17, 198. [Google Scholar] [CrossRef] [PubMed]
- Zhu, L.; Wang, R.; Wang, Z.; Yang, H. Tagcare: Using rfids to monitor the status of the elderly living alone. IEEE Access 2017, 5, 11364–11373. [Google Scholar] [CrossRef]
- Aziz, O.; Musngi, M.; Park, E.J.; Mori, G.; Robinovitch, S.N. A comparison of accuracy of fall detection algorithms (threshold-based vs. Machine learning) using waist-mounted tri-axial accelerometer signals from a comprehensive set of falls and non-fall trials. Med. Biol. Eng. Comput. 2017, 55, 45–55. [Google Scholar] [CrossRef] [PubMed]
- Kianoush, S.; Savazzi, S.; Vicentini, F.; Rampa, V.; Giussani, M. Device-free rf human body fall detection and localization in industrial workplaces. IEEE Internet Things J. 2017, 4, 351–362. [Google Scholar] [CrossRef]
- Li, Y.; Zhai, Q.; Ding, S.; Yang, F.; Li, G.; Zheng, Y.F. Efficient health-related abnormal behavior detection with visual and inertial sensor integration. Pattern Anal. Appl. 2017. [Google Scholar] [CrossRef]
- Hsieh, C.-Y.; Liu, K.-C.; Huang, C.-N.; Chu, W.-C.; Chan, C.-T. Novel hierarchical fall detection algorithm using a multiphase fall model. Sensors 2017, 17, 307. [Google Scholar] [CrossRef] [PubMed]
- Kulkarni, R.V.; Venayagamoorthy, G.K. Bio-inspired algorithms for autonomous deployment and localization of sensor nodes. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2010, 40, 663–675. [Google Scholar] [CrossRef]
- Li, S.; Qin, F. A dynamic neural network approach for solving nonlinear inequalities defined on a graph and its application to distributed, routing-free, range-free localization of wsns. Neurocomputing 2013, 117, 72–80. [Google Scholar] [CrossRef]
- Zhao, L.-Z.; Wen, X.-B.; Li, D. Amorphous localization algorithm based on BP artificial neural network. Int. J. Distrib. Sens. Netw. 2015, 11, 9. [Google Scholar] [CrossRef]
- Kumar, S.; Sharma, R.; Vans, E. Localization for wireless sensor networks: A neural network approach. Int. J. Comput. Networks Commun. 2016, 8, 61–71. [Google Scholar] [CrossRef]
- Payal, A.; Rai, C.; Reddy, B. Comparative analysis of bayesian regularization and levenberg-marquardt training algorithm for localization in wireless sensor network. In Proceedings of the 15th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 27–30 January 2013; pp. 191–194. [Google Scholar]
- Payal, A.; Rai, C.; Reddy, B. Artificial neural networks for developing localization framework in wireless sensor networks. In Proceedings of the International Conference on Data Mining and Intelligent Computing (ICDMIC), Delhi, India, 5–6 September 2014; pp. 1–6. [Google Scholar]
- Jun, W.; Fu, Z.; Tiansi, R.; Xun, C.; Gang, L. A novel hybrid localization method for wireless sensor network. Int. J. Smart Sens. Intell. Syst. 2016, 9, 1323–1340. [Google Scholar] [CrossRef]
- Wu, X.; Deng, F.; Chen, Z. Rfid 3D-landmarc localization algorithm based on quantum particle swarm optimization. Electronics 2018, 7, 19. [Google Scholar]
- Nekooei, S.M.; Manzuri-Shalmani, M. Location finding in wireless sensor network based on soft computing methods. In Proceedings of the International Conference on Control, Automation and Systems Engineering (CASE), Singapore, 30–31 July 2011; pp. 1–5. [Google Scholar]
- So-In, C.; Permpol, S.; Rujirakul, K. Soft computing-based localizations in wireless sensor networks. Pervasive Mob. Comput. 2016, 29, 17–37. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, Z.; Dong, T. A review of wearable technologies for elderly care that can accurately track indoor position, recognize physical activities and monitor vital signs in real time. Sensors 2017, 17, 341. [Google Scholar] [CrossRef] [PubMed]
- Liang, Y.; Zhou, X.; Yu, Z.; Guo, B. Energy-efficient motion related activity recognition on mobile devices for pervasive healthcare. Mob. Netw. Appl. 2014, 19, 303–317. [Google Scholar] [CrossRef]
- Miramontes, R.; Aquino, R.; Flores, A.; Rodríguez, G.; Anguiano, R.; Ríos, A.; Edwards, A. Plaimos: A remote mobile healthcare platform to monitor cardiovascular and respiratory variables. Sensors 2017, 17, 176. [Google Scholar] [CrossRef] [PubMed]
- Kantoch, E.; Grochala, D.; Kajor, M. Bio-inspired topology of wearable sensor fusion for telemedical application. In Artificial Intelligence and Soft Computing: 16th International Conference, ICAISC 2017, Zakopane, Poland, June 11–15, 2017, Proceedings, Part I; Rutkowski, L., Korytkowski, M., Scherer, R., Tadeusiewicz, R., Zadeh, L.A., Zurada, J.M., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 658–667. [Google Scholar]
- Nguyen Gia, T.; Sarker, V.K.; Tcarenko, I.; Rahmani, A.M.; Westerlund, T.; Liljeberg, P.; Tenhunen, H. Energy efficient wearable sensor node for IoT-based fall detection systems. Microprocess. Microsyst. 2018, 56, 34–46. [Google Scholar] [CrossRef]
- Wang, Y.; Krishnamachari, B.; Annavaram, M. Semi-markov state estimation and policy optimization for energy efficient mobile sensing. In Proceedings of the Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 533–541. [Google Scholar]
- Ren, L.; Zhang, Q.; Shi, W. Low-power fall detection in home-based environments. In Proceedings of the 2nd ACM international workshop on Pervasive Wireless Healthcare, Hilton Head, SC, USA, 11 June 2012; pp. 39–44. [Google Scholar]
- Pinto, S.; Cabral, J.; Gomes, T. We-care: An iot-based health care system for elderly people. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Toronto, ON, Canada, 22–25 March 2017; pp. 1378–1383. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Definitions | Symbols | Definitions |
|---|---|---|---|
| Wl | Path loss power | IAvg_TL | Average current consumption of the tilt sensor |
| Wo | Path loss power at reference distance = 1 m | IAvg_ACC | Average current consumption of the accelerometer |
| WT | Transmitted power of the beacon node | IAvg_SH | Average current consumption of the shock sensor |
| α | Path loss exponents | IAvg_MR | Average current consumption of the microcontroller |
| γ | Standard deviation | IAvg_ZB | Average current consumption of the ZigBee |
| l | Distance under test | DC | Duty cycle |
| lo | Reference distance (1 m in this study) | Iactive_TL | Active current consumption of the tilt sensor |
| RSSI | Received signal strength indicator | Isleep_TL | Sleep current consumption of the tilt sensor |
| xactual | Actual location for the x coordinate | Iactive_ACC | Active current consumption of the accelerometer |
| xestimated | Estimated location for the x coordinate | Isleep_ACC | Sleep current consumption of the accelerometer |
| yactual | Actual location for the y coordinate | Iactive_SH | Active current consumption of the shock sensor |
| yestimated | Estimated location for the y coordinate | Isleep_SH | Sleep current consumption of the shock sensor |
| MAEx | Mean absolute error for the x coordinate | Iactive_MR | Active current consumption of the microcontroller |
| MAEy | Mean absolute error for the y coordinate | Isleep_MR | Sleep current consumption of the microcontroller |
| MAE | Mean absolute error | Iactive_ZB | Active current consumption of the ZigBee |
| n | Number of tested RSSI samples | Isleep_ZB | Sleep current consumption of the ZigBee |
| θ(t) | Angle of fall | Ttotal | Total time of duty cycle |
| ax(t) | Accelerations along the x-axis | tx | Transmission time of ZigBee |
| ay(t) | Accelerations along the y-axis | tsw | Time transient from sleep to active modes |
| az(t) | Accelerations along the z-axis | l | data packet length of ZigBee |
| Iavg | Average current consumption of FDS | S | ZigBee data rate |
| Parameter | Tilt Sensor | Accelerometer Sensor | Shock Sensor | Microcontroller @ 4 MHz | ZigBee (XBee S2) |
|---|---|---|---|---|---|
| Iactive (mA) | 0.4 | 0.27 | 0.5 | 2.5 | 37.5 |
| Isleep (mA) | 0 | 0 | 0 | 0.09 | 0.56 |
| tactive (min) | 1 | 1 | 1 | 1 | 1 |
| *tsleep (min) | 1439 | 1439 | 1439 | 1439 | 1439 |
| Ttotal (min) | 1440 | 1440 | 1440 | 1440 | 1440 |
| DC | 6.4 × 10−4 | 6.4 × 10−4 | 6.4 × 10−4 | 6.4 × 10−4 | 6.4 × 10−4 |
| Isubtotal (µA) | 0.258 | 0.174 | 0.322 | 91.553 | 583.804 |
| Average current consumption based DDA = 676 µA | |||||
| Total current consumption in conventional operations = 41.17 mA | |||||
| *tsleep = Ttotal − tactive, all components working at +3.3 Volts. | |||||
| Environments | Fall Detected (FD) | Fall Not Detected (FND) | False Alarm (%) (False Alarm = FDN/FD) | Accuracy (%) (Accuracy = FD/TE) |
|---|---|---|---|---|
| LOS | 40 | 0 | 0 | 100 |
| NLOS | 37 | 3 | 8.1 | 92.5 |
| Ref./Year | Fall Detection Algorithm | Wireless Protocol/Technology | Sensor Type | Sensor Location | Test Conditions | Acc. (%) |
|---|---|---|---|---|---|---|
| [47]/2012 | ANN | BT, IEEE 802.15.4 | Tri-axial accelerometer | Waist | Indoor, outdoor | 81.4 |
| [75]/2013 | Fuzzy Logic | 3D motion analysis | Camera | Shoulder, spine, hip | N/A | 98.6 |
| [76]/2014 | k-NN with weighted RSSI | ZigBee | Tri-axial accelerometer | Waist | Indoor | 88.62 |
| [77]/2014 | Hierarchical rule-based | WiFi | Accelerometer, GPS, magnetic, orientation | Waist | Indoor | 95 |
| [38]/2015 | Threshold-based | WiFi (IEEE 802.11 b/g) | Tri-axial accelerometer Tri-axial gyroscope | Chest | Indoor | 90 |
| [78]/2016 | SVM | HD camera | Camera | Head | Indoor, outdoor | 90.27 |
| [79]/2016 | SVM | BT | Tri-axial accelerometer | Waist | Indoor | 94.58 |
| [80]/2016 | Fuzzy dynamic | Kinect camera | Accelerometer Image | Camera Parallel to the floor | Indoor | 92.86 |
| ANFIS and SVM | 95.71 | |||||
| Fuzzy beacon and dynamic | 97.14 | |||||
| [35]/2016 | k-NN and sliding window | BT | Tri-axial accelerometer Tri-axial gyroscope | Upper trunk | Indoor | 97.7 |
| [81]/2016 | ANN, RBF, k-NN | BT | Tri-axial accelerometer | Chest | Indoor | 99 |
| [82]/2017 | SVM, Threshold-based | WiFi | Accelerometer Gyroscope | Waist, hand, chest, arm | Indoor | 79.13 |
| [83]/2017 | k-NN, NB, SVM, BN, DT, LR, MP | Smartphone | Tri-axial accelerometer | N/A | N/A | 81.4 (k-NN) |
| [84]/2017 | SVM, NNC, DT, DA | WiFi | Tri-axial accelerometer, Tri-axial gyroscope, proximity, compass | Left, right, front-pockets | Indoor | 90 |
| [85]/2017 | Compressed sensing | IEEE 802.15.4 | Motion | N/A | Indoor | 90.9 |
| [86]/2017 | Data-level fusion | UWB radar system | Doppler signatures | L-shape geometry | Indoor | 91.63 |
| Decision level fusion | 79.63 | |||||
| Sensor selection | 86.99 | |||||
| [87]/2017 | SVM | BT LE | Smartwatch | Wrist | N/A | 93.8 |
| [88]/2017 | SVM | Microsoft kinect | Microsoft kinect | Skeletal joints | Indoor | 93.6 |
| [89]/2017 | Camera-based | Microsoft lifeCam | Camera | Waist | Indoor, outdoor | 93.78 |
| [90]/2017 | Fall Risk Index (FRI) | Bluetooth LE | Accelerometer, Gyroscope, Pressure | Insoles | Indoor | 93.9 |
| [91]/2017 | Depth image | Microsoft kinect | Infrared (IR) | Skeletal joints | Indoor | 93.94 |
| [92]/2017 | SVM | WiFi | Without sensors (signal path) | Beacon AP | Indoor (LOS) | 90 |
| RF | 95 | |||||
| [93]/2017 | SVM | Bluetooth | Accelerometer | Lumbar | Indoor, outdoor | 94.58 |
| [94]/2017 | k-NN | Membership histogram descriptor | Camera (video frames) | Constant camera | Indoor | 94.73 |
| [95]/2017 | Vision-based | Video samples | Videos of different postures | Constant camera | Indoor | 94.9 |
| [96]/2017 | Ameva | Smartphone | Electromyogram, accelerometer | Hand, wrist | Indoor, outdoor | 95 |
| [97]/2017 | Threshold-based | Arduino UNO and Matlab | Tri-axial accelerometer Tri-axial gyroscope | Wrist | Indoor | 95 |
| [68]/2017 | BN and SW | BT class 2 | Tri-axial accelerometer Tri-axial gyroscope | Vest | Indoor, outdoor | 95.67 |
| [98]/2017 | Dataset | Data store in SD card | Accelerometer and gyroscope | Waist | Indoor, outdoor | 96 |
| [99]/2017 | SVM | RFID | RFID Tag | Neck | Indoor | 96 |
| [100]/2017 | SVM, LR, k-NN, NB, DT | N/A | Tri-axial accelerometer | Waist | Indoor | 96 (SVM) |
| [23]/2017 | SVM, ANN | Smartphone | Tri-axial accelerometer, Tri-axial gyroscope | Worn on the body | Indoor | 91.71 (SVM) 96.07 (ANN) |
| [101]/2017 | Hidden Markova model | WiFi (802.11 g), ZigBee | 3D image sensors | Ceiling-cameras | Indoor | 98 |
| [102]/2017 | VI Fusion-based, SVM | Smartphone | Tri-axial accelerometer, visual camera | Users’ pocket | N/A | 98.9 |
| [103]/2017 | Threshold-based Knowledge-based | N/A | Tri-axial accelerometer | Waist, knee, elbow, head | Indoor | 99.33 |
| [73]/2017 | SVM | N/A | Tri-axial accelerometer Tri-axial gyroscope | Waist, sternum | Indoor | 99.99 |
| [74]/2017 | SVM | WiFi | Without sensors (signal path) | Beacon AP | Indoor | 100 |
| Proposed S-BFDA in LOS | ANN | ZigBee (XBee S2) | Accelerometer, tilt heart rate | Waist | Indoor | 100 |
| Proposed S-BFDA in NLOS | ANN | ZigBee (XBee S2) | Accelerometer, tilt heart rate | Waist | Indoor | 92.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gharghan, S.K.; Mohammed, S.L.; Al-Naji, A.; Abu-AlShaeer, M.J.; Jawad, H.M.; Jawad, A.M.; Chahl, J. Accurate Fall Detection and Localization for Elderly People Based on Neural Network and Energy-Efficient Wireless Sensor Network. Energies 2018, 11, 2866. https://0-doi-org.brum.beds.ac.uk/10.3390/en11112866
Gharghan SK, Mohammed SL, Al-Naji A, Abu-AlShaeer MJ, Jawad HM, Jawad AM, Chahl J. Accurate Fall Detection and Localization for Elderly People Based on Neural Network and Energy-Efficient Wireless Sensor Network. Energies. 2018; 11(11):2866. https://0-doi-org.brum.beds.ac.uk/10.3390/en11112866
Chicago/Turabian StyleGharghan, Sadik Kamel, Saleem Latteef Mohammed, Ali Al-Naji, Mahmood Jawad Abu-AlShaeer, Haider Mahmood Jawad, Aqeel Mahmood Jawad, and Javaan Chahl. 2018. "Accurate Fall Detection and Localization for Elderly People Based on Neural Network and Energy-Efficient Wireless Sensor Network" Energies 11, no. 11: 2866. https://0-doi-org.brum.beds.ac.uk/10.3390/en11112866