Improved Frequency Locked Loop Based Synchronization Method for Three-Phase Grid-Connected Inverter under Unbalanced and Distorted Grid Conditions


Abstract
:1. Introduction
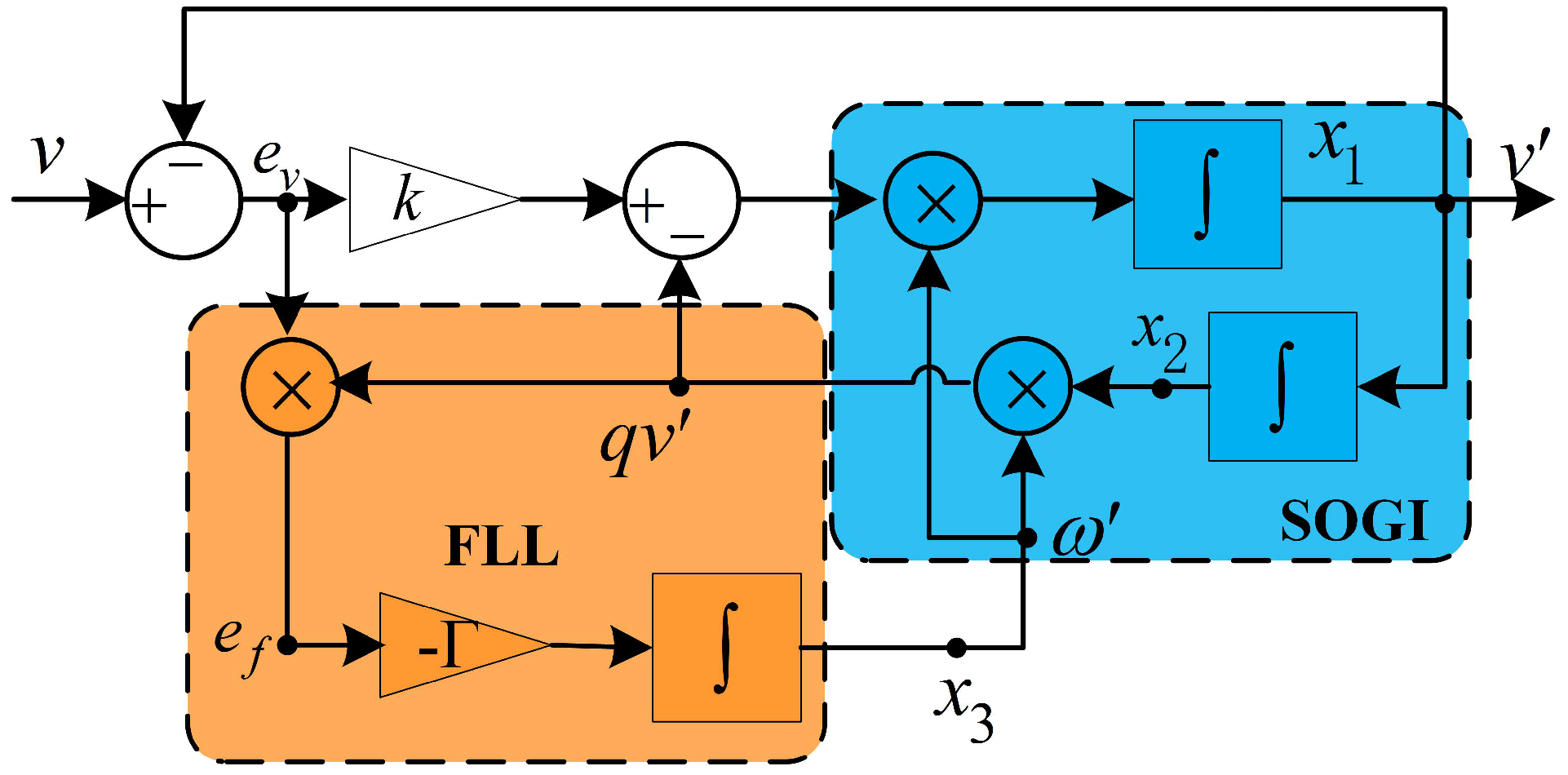
2. Modeling Analysis of the SOGI-FLL
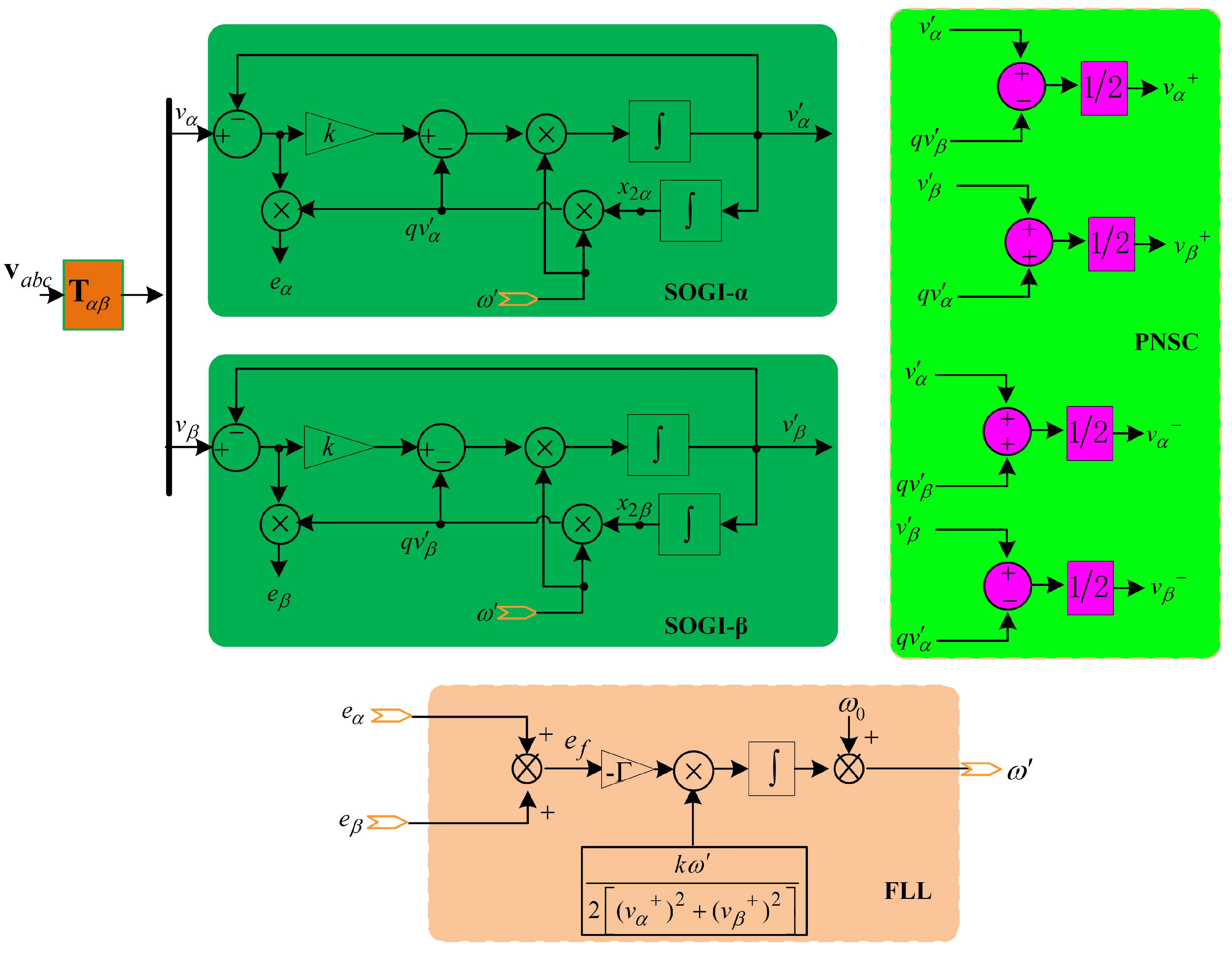
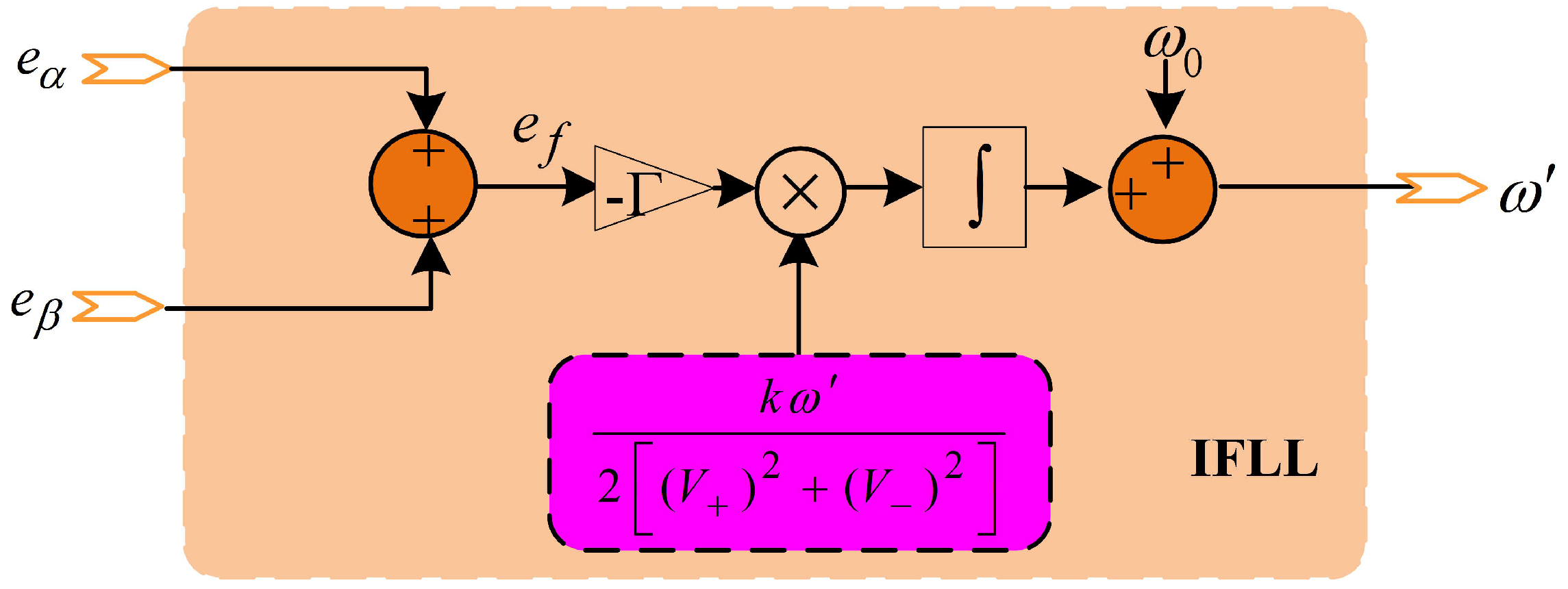
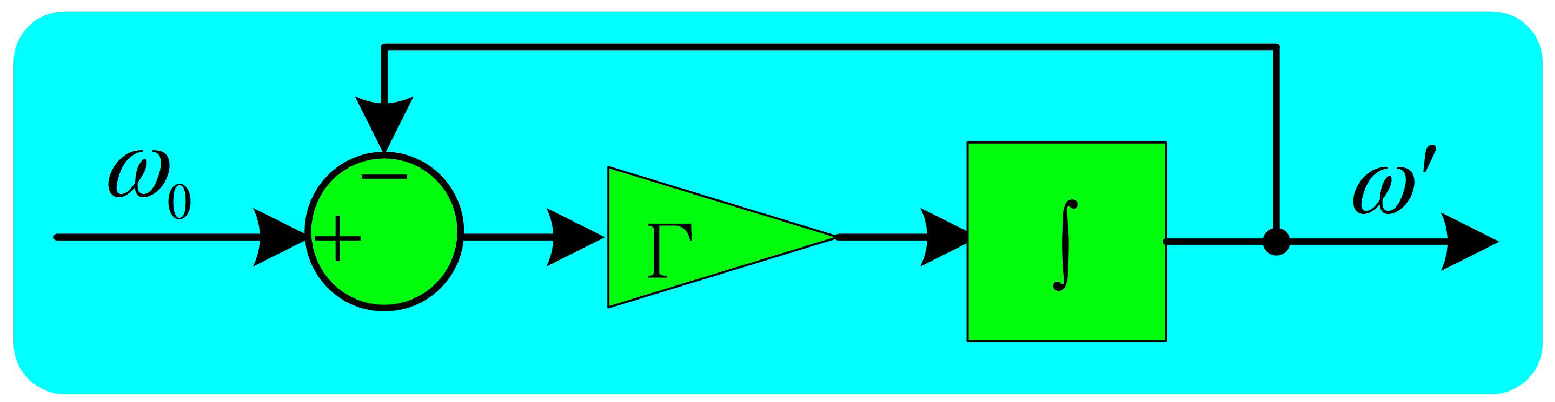
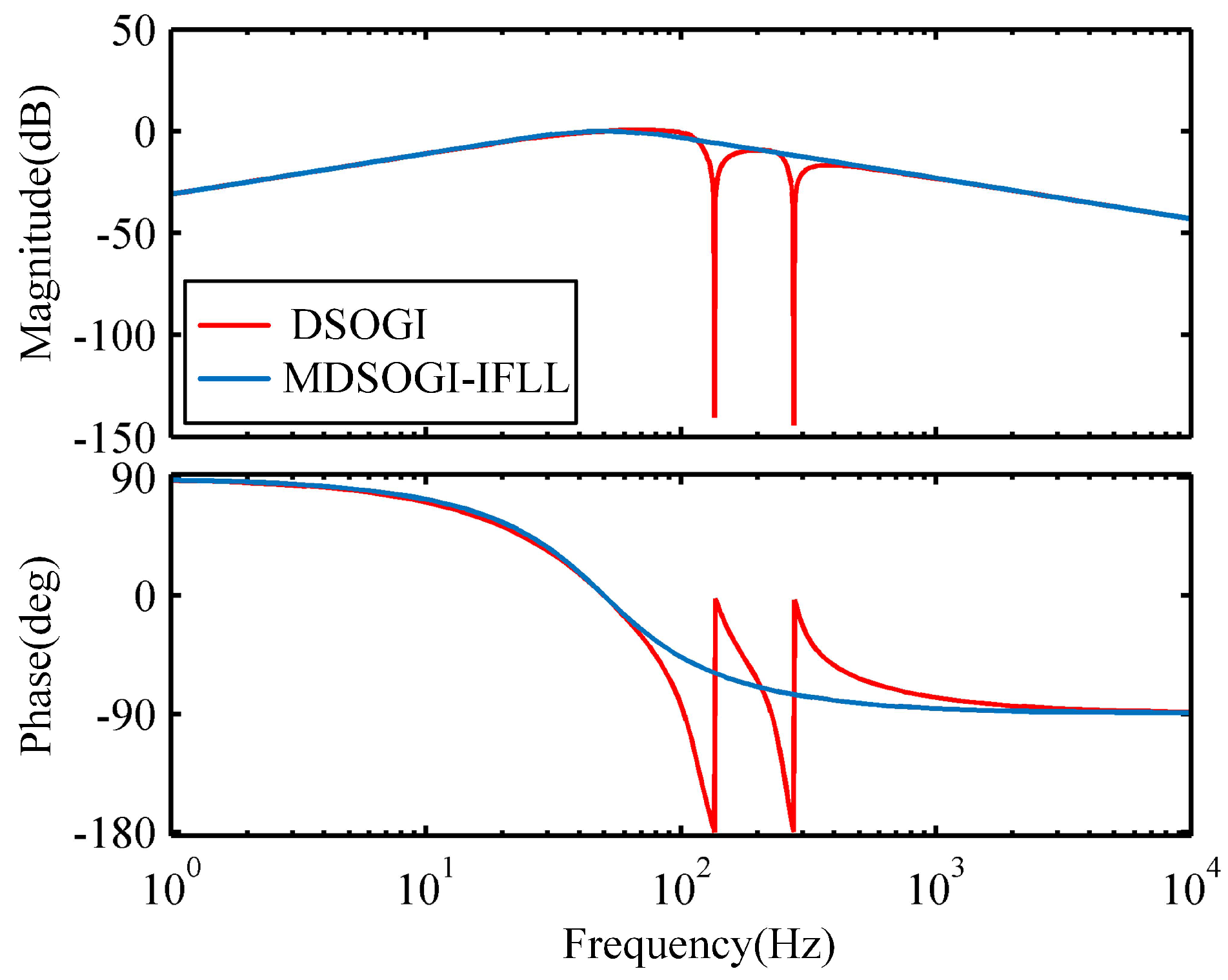
3. Dynamics Analysis of the DSOGI-FLL and Its Improved Design
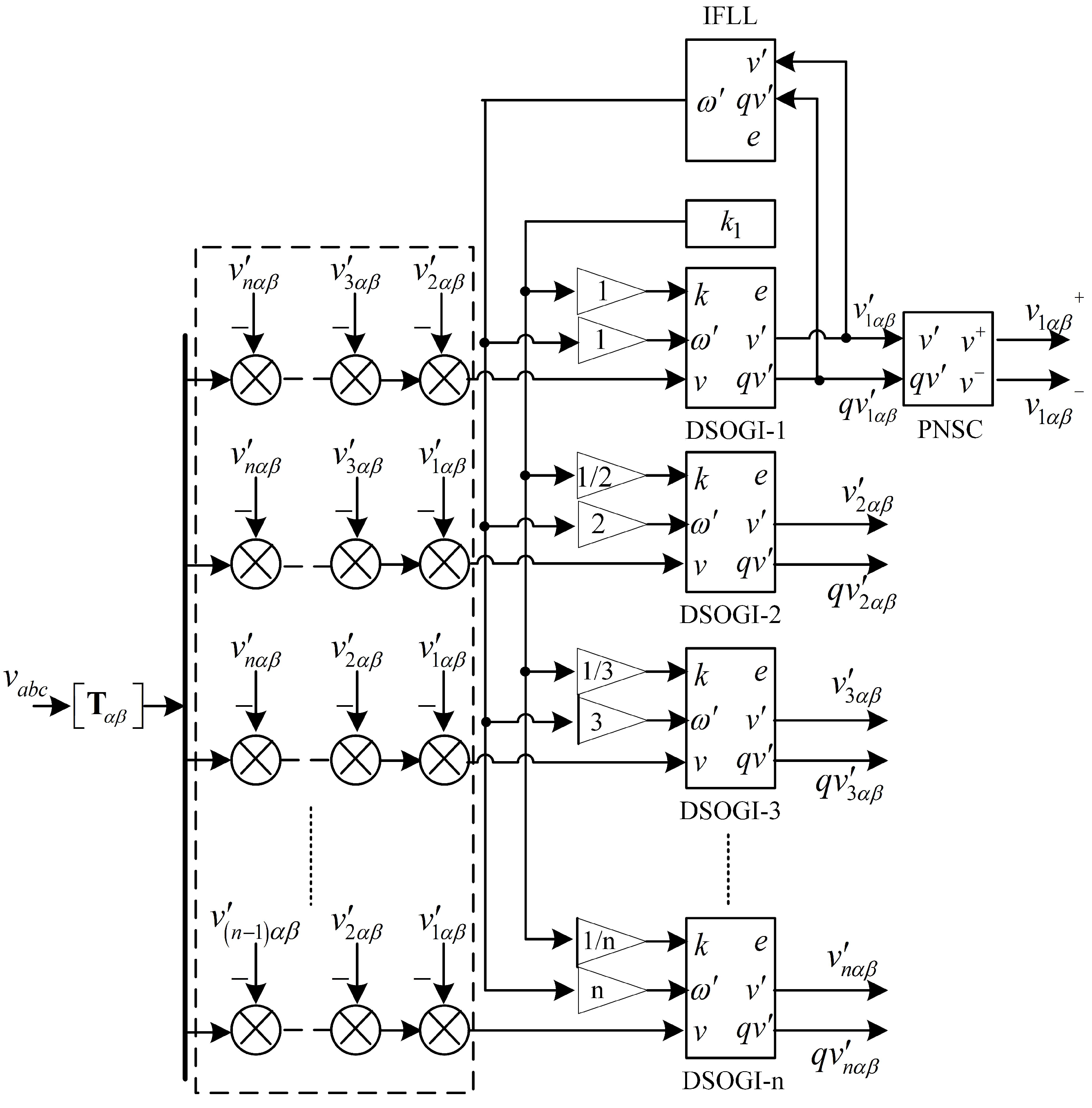
4. Synchronization Method Based on Multiple DSOGI-IFLL
5. Simulations and Experiments
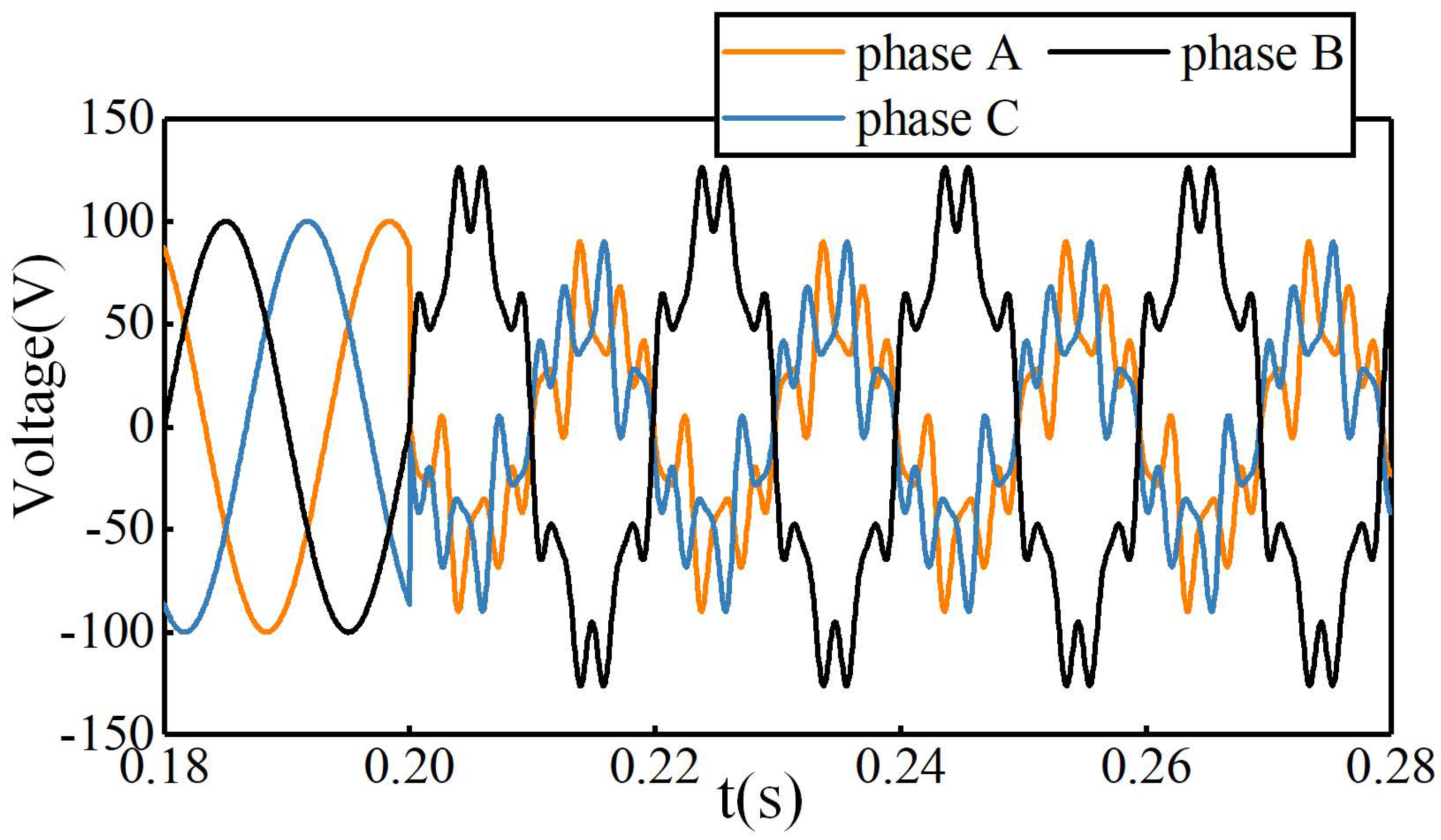
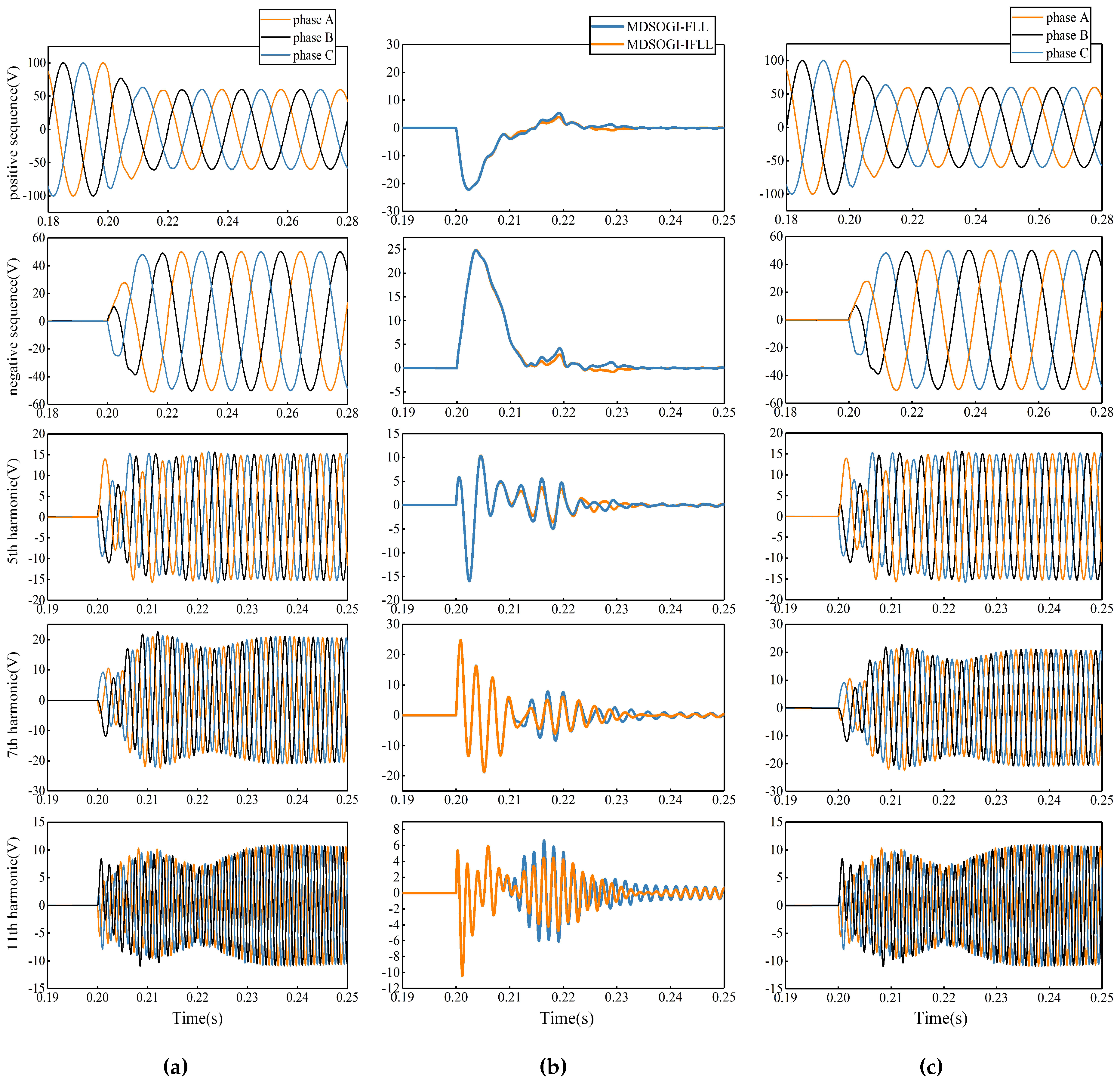
5.1. Harmonic Detection Simulation Test
5.2. Experimental Verification
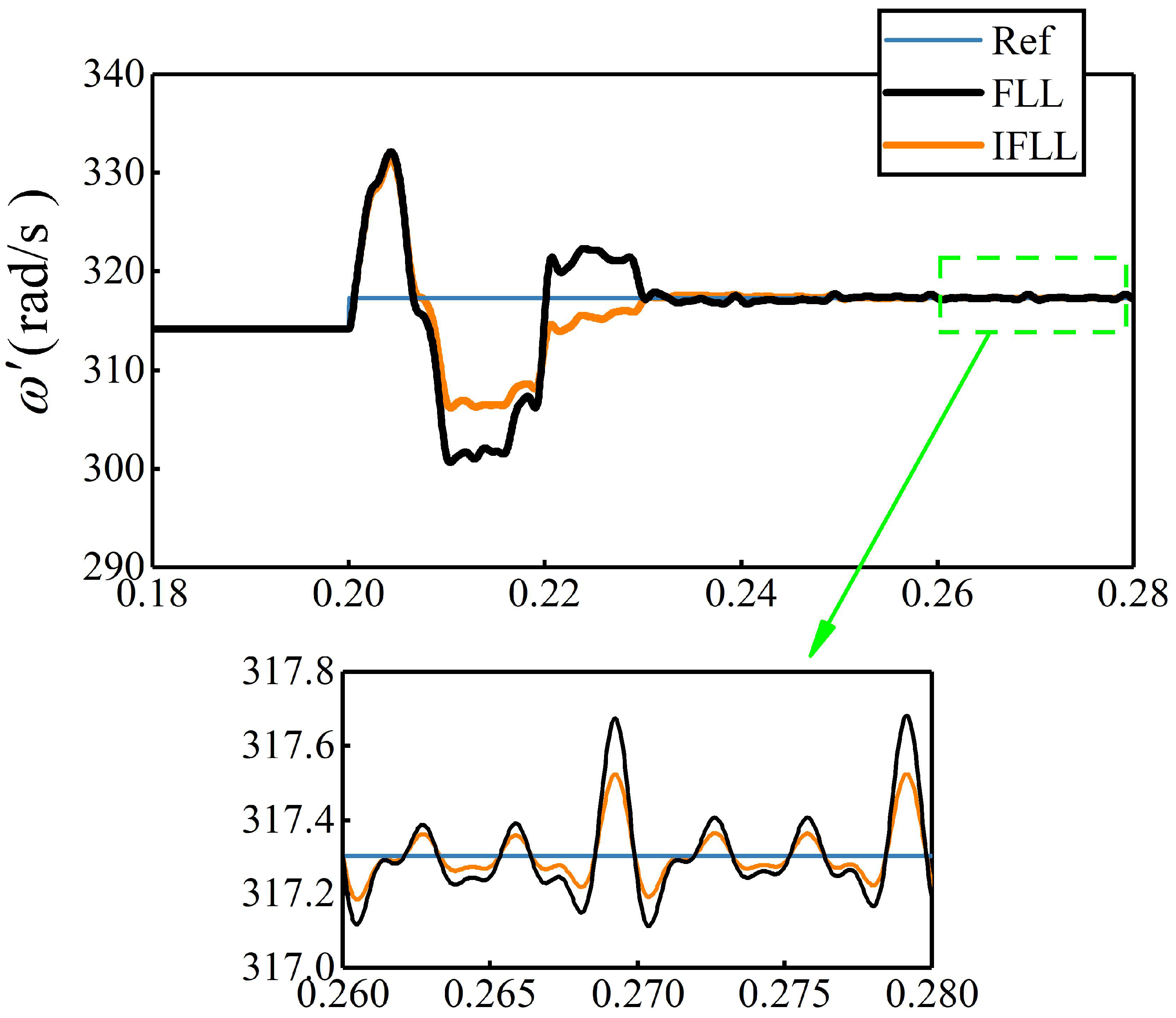
5.2.1. Performance Comparison of Frequency Detection between MDSOGI-FLL and MDSOGI-IFLL
5.2.2. Performance Comparison between MDSOGI-IFLL and Other Synchronization Methods
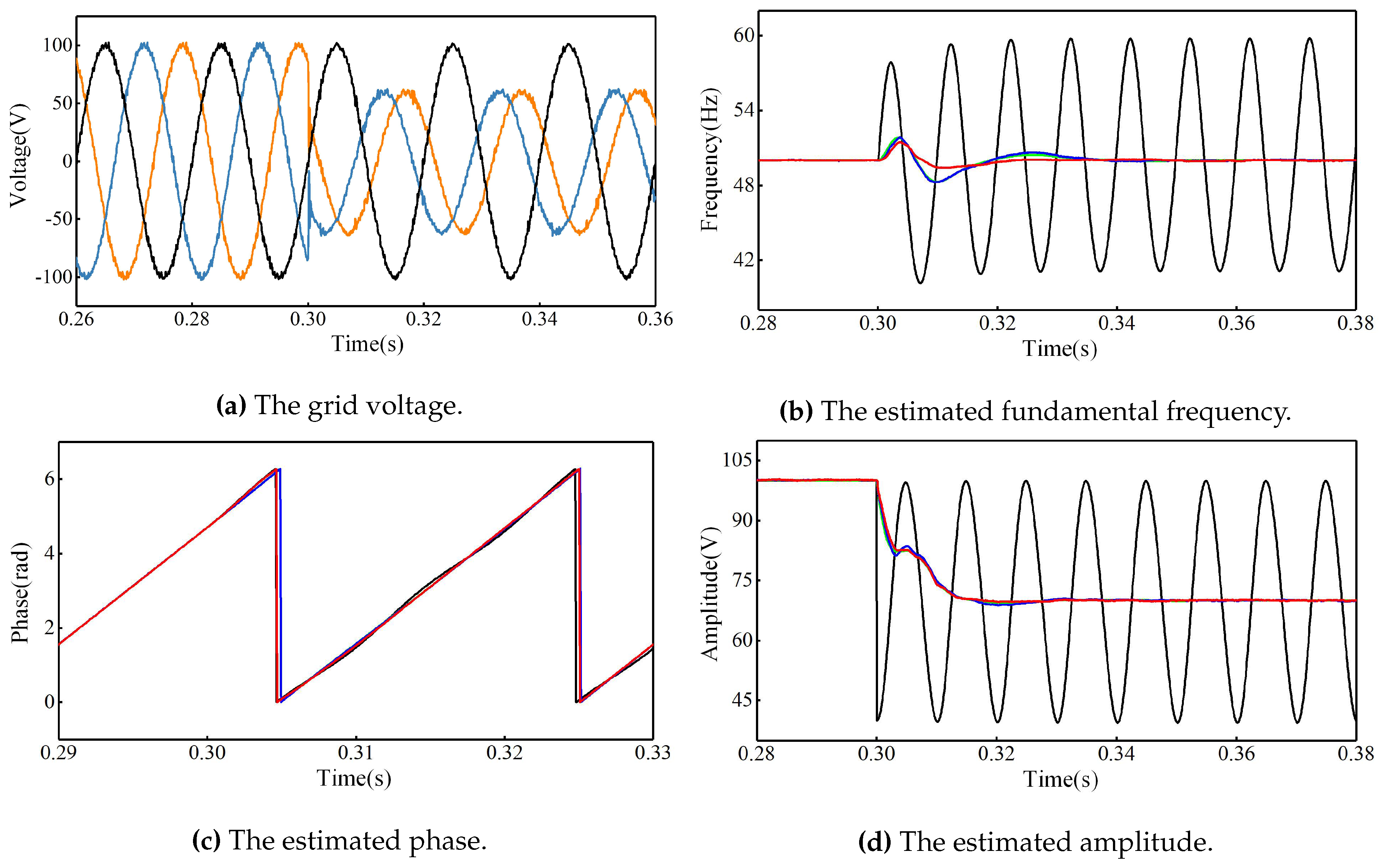
A. Unbalanced Voltage
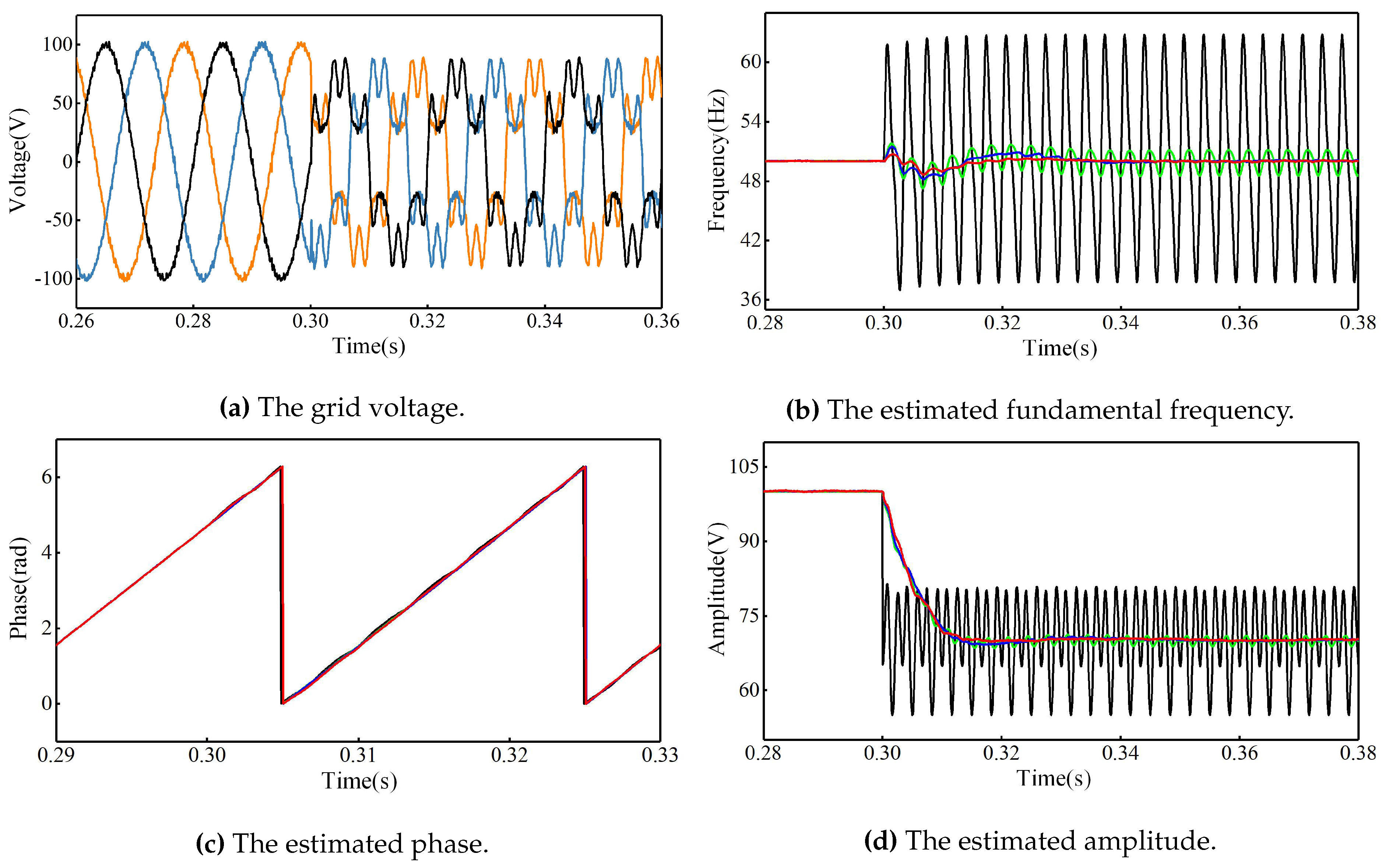
B. Distorted Voltage
C. Phase Jump
D. Brief Comparison
6. Conclusions
- According to the modeling analysis of the DSOGI-FLL, the drawback of the design method for the FLL unit proposed in [24] is pointed out. Based on the analysis, an improved design (referred as IFLL) that takes the fundamental negative sequence voltage into consideration in the design is proposed. The dynamic performance of the DSOGI-IFLL is independent of the variation of both the fundamental positive and the negative sequence voltage.
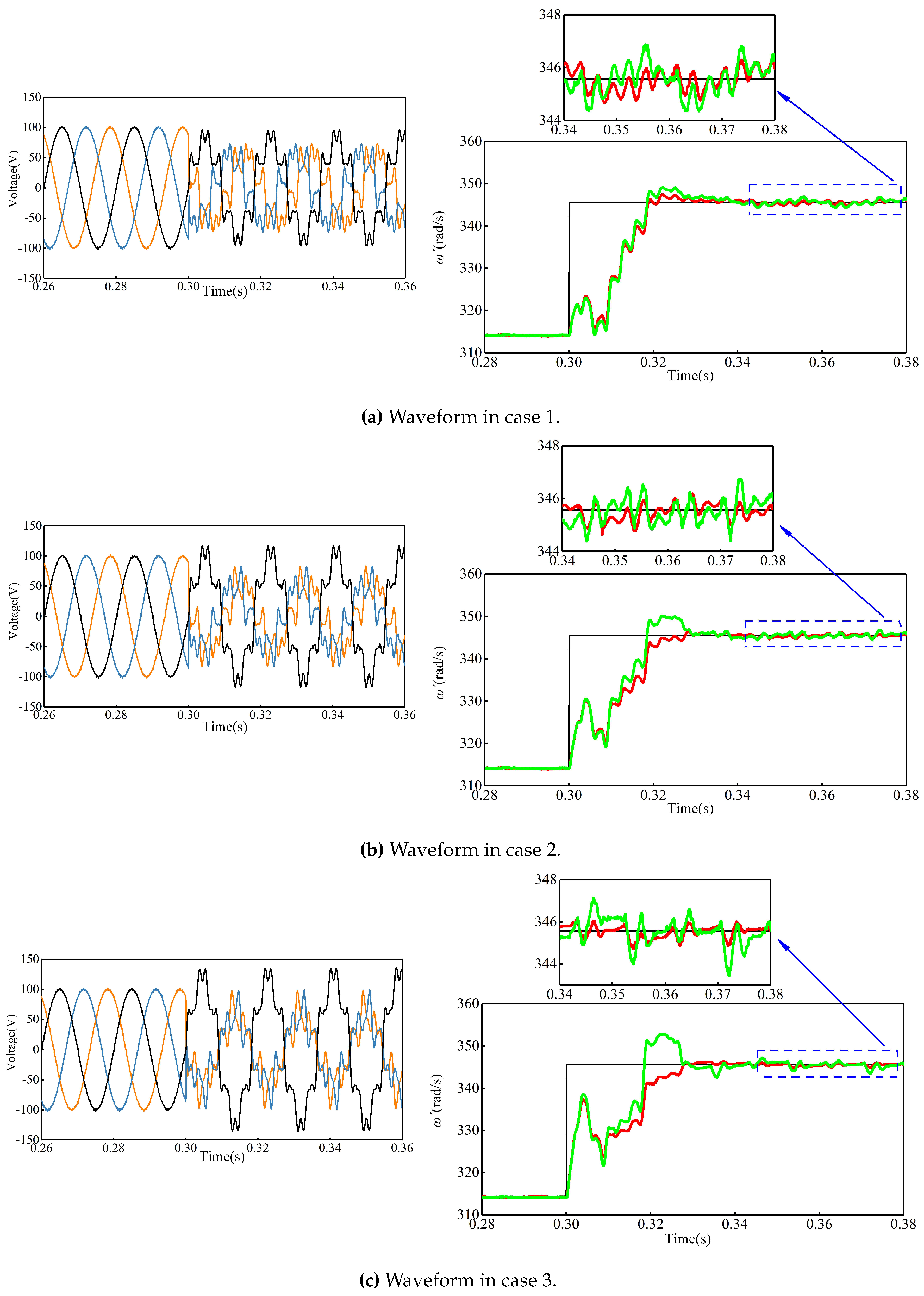
- Under unbalanced grid voltage, the proposed MDSOGI-IFLL has a better transient performance than the MDSOGI-FLL in frequency detection when the grid frequency changes.
- The MDSOGI-IFLL shows the outstanding performance of the estimation of the positive- and negative-sequence components even under the extremely unbalanced and distorted grid voltage. In addition, the MDSOGI-IFLL also could be used for selective harmonic compensation, islanding detection, and so on.
Author Contributions
Funding
Conflicts of Interest
References
- Geng, H.; Xu, D.; Wu, B. A novel hardware-based all-digital phase-locked loop applied to grid-connected power converters. IEEE Trans. Ind. Electron. 2011, 58, 1737–1745. [Google Scholar] [CrossRef]
- Yada, H.K.; Murthy, M.S.R. Enhancement in Loop Filter of a Second Order Generalized Integrator-PLL by Using Proportional-Resonant Controller. J. Electr. Eng. 2016, 16, 18–23. [Google Scholar]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Kaura, V.; Blasko, V. Operation of a phase locked loop system under distorted utility conditions. IEEE Trans. Ind. Appl. 1997, 33, 58–63. [Google Scholar] [CrossRef]
- Chung, S.-K. A phase tracking system for three phase utility interface inverters. IEEE Trans. Power Electron. 2000, 15, 431–438. [Google Scholar] [CrossRef]
- Rodriguez, P.; Pou, J.; Bergas, J.; Candela, J.I.; Burgos, R.P.; Boroyevich, D. Decoupled double synchronous reference frame PLL for power converters control. IEEE Trans. Power Electron. 2007, 22, 584–592. [Google Scholar] [CrossRef]
- Ghartemani, M.K.; Khajehoddin, S.A.; Jain, P.K.; Bakhshai, A. Problems of startup and phase jumps in PLL systems. IEEE Trans. Power Electron. 2012, 27, 1830–1838. [Google Scholar] [CrossRef]
- Yuan, X.; Merk, W.; Stemmler, H.; Allmeling, J. Stationary-frame generalized integrators for current control of active power filters with zero steady state error for current harmonics of concern under unbalanced and distorted operation conditions. IEEE Trans. Ind. Appl. 2002, 38, 523–532. [Google Scholar] [CrossRef]
- Wei, M.; Chen, Z. A fast PLL method for power electronic systems connected to distorted grids. In Proceedings of the IECON 2007 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1702–1707. [Google Scholar]
- Arruda, L.N.; Silva, S.M.; Filho, B.J.C. PLL structures for utility connected systems. In Proceedings of the Conference Record of the 2001 IEEE Industry Applications Conference 36th IAS Annual Meeting (Cat. No.01CH37248), Chicago, IL, USA, 30 September–4 October 2001; Voulme 4, pp. 2655–2660. [Google Scholar]
- Yang, Y.; Frede, B. Synchronization in single-phase grid-connected photovoltaic systems under grid faults. In Proceedings of the 2012 3rd IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aalborg, Denmark, 25–28 June 2012; pp. 476–482. [Google Scholar]
- Yang, Y.; Hadjidemetriou, L.; Blaabjerg, F.; Kyriakides, E. Benchmarking of phase locked loop based synchronization techniques for grid connected inverter systems. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 2167–2174. [Google Scholar]
- Sohail, K.; Benoit, B.; Adolfo, A.; Wolfgang, G. On Small Signal Frequency Stability under Virtual Inertia and the Role of PLLs. Energies 2018, 11, 2372. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. Advanced grid synchronization system for power converters under unbalanced and distorted operating conditions. In Proceedings of the IECON 2006 32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 7–10 November 2006; pp. 5173–5178. [Google Scholar]
- Matas, J.; Miret, J.; de Vicuña, L.G.; Guzman, R. An adaptive prefiltering method to improve the speed/accuracy tradeoff of voltage sequence detection methods under adverse grid conditions. IEEE Trans. Ind. Electron. 2014, 61, 2139–2151. [Google Scholar] [CrossRef]
- Du, H.; Sun, Q.; Cheng, Q.; Ma, D.; Wang, X. An Adaptive Frequency Phase-Locked Loop Based on a Third Order Generalized Integrator. Energies 2019, 12, 309. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Muñoz-Aguilar, R.S.; Etxeberria-Otadui, I.; Teodoresc, R. A stationary reference frame grid synchronization system for three-phase grid-connected power converters under adverse grid conditions. IEEE Trans. Power Electron. 2012, 27, 99–112. [Google Scholar] [CrossRef]
- Gonzalez-Espin, F.; Garcera, G.; Patrao, I.; Figueres, E. An adaptive control system for three-phase photovoltaic inverters working in a polluted and variable frequency electric grid. IEEE Trans. Power Electron. 2012, 27, 4248–4261. [Google Scholar] [CrossRef]
- Lee, K.; Lee, J.; Shin, D.; Yoo, D.; Kim, H. A novel grid synchronization PLL method based on adaptive low-pass notch filter for grid-connected PCS. IEEE Trans. Ind. Electron. 2014, 61, 292–301. [Google Scholar] [CrossRef]
- Zhang, B.; Zhou, K.; Wang, D. Multi-rate repetitive control for PWM DC/AC converters. IEEE Trans. Ind. Electron. 2014, 61, 2883–2890. [Google Scholar] [CrossRef]
- Han, Y.; Luo, M.; Zhao, X.; Guerrero, J.; Xu, L. Comparative performance evaluation of orthogonal-signal- generators based single-phase PLL algorithms—A survey. IEEE Trans. Power Electron. 2016, 31, 3932–3944. [Google Scholar] [CrossRef]
- Golestan, S.; Ramezani, M.; Guerrero, J.M.; Freijedo, F.D.; Monfared, M. Moving average filter based phase-locked loops: Performance analysis and design guidelines. IEEE Trans. Power Electron. 2014, 29, 2750–2763. [Google Scholar] [CrossRef]
- Hadjidemetriou, L.; Kyriakides, E.; Blaabjerg, F. A robust synchronization to enhance the power quality of renewable energy systems. IEEE Trans. Ind. Electron. 2015, 62, 4858–4868. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant Frequency-Locked Loop for Grid Synchronization of Power Converters under Distorted Grid Conditions. IEEE Trans. Ind. Electron. 2011, 58, 127–138. [Google Scholar] [CrossRef]
- Guo, X.Q.; Wu, W.Y.; Chen, Z. Multiple-Complex Coefficient-Filter-Based Phase-Locked Loop and Synchronization Technique for Three-Phase Grid-Interfaced Converters in Distributed Utility Networks. IEEE Trans. Ind. Electron. 2011, 58, 1194–1204. [Google Scholar] [CrossRef]
- Riedle, B.D.; Kokotovic, P.V. Integral manifolds of slow adaptation. IEEE Trans. Autom. Control 1986, 31, 316–324. [Google Scholar] [CrossRef] [Green Version]
- Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. A new single phase PLL structure based on second order generalized integrator. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Component | Value [p.u.] | ||
|---|---|---|---|
| Case 1 | Case 2 | Case 3 | |
| Fundamental positive sequence | 0.6 | 0.6 | 0.6 |
| Fundamental negative sequence | 0.2 | 0.4 | 0.6 |
| 5th harmonic | 0.2 | 0.2 | 0.2 |
| 7th harmonic | 0.15 | 0.15 | 0.15 |
| 11th harmonic | 0.1 | 0.1 | 0.1 |
| Pros and Cons | Advantages | Disadvantages | |
|---|---|---|---|
| Synchronization Methods | |||
| SRF-PLL | The structure of SRF-PLL is simple. It is easy to design and it can effectively detect the amplitude, phase, and frequency of the grid voltage with perfect steady-state and dynamic response under the idea grid voltage. | It is sensitive to unbalance and harmonics. | |
| DDSRF-PLL | It can accurately extract the positive and negative sequence components of the voltage with good dynamic performance and good frequency adaptability even when the grid voltage is unbalanced. | Its ability to attenuate low-order harmonics is insufficient. In addition, its transient response is highly influenced by the phase-angle jumps of the input signal. | |
| MCCF-PLL | The structure of MCCF is flexible. Through the cross-feedback network, it can accurately detect the information of grid voltage in the steady state even under the unbalanced and distorted grid voltage. | To obtain good performance under the distorted grid voltage, its structure will be more complex, thereby, requiring more DSP resource compared to SRF-PLL or DDSRF-PLL. Since its frequency-adaptive depends on the cascaded PLL, its transient response is highly influenced by the phase-angle jumps of the input signal. | |
| MDSOGI-IFLL | It shows perfect performance under the unbalanced and distorted grid voltage. Due to the FLL, the performance of frequency detection is the best. Hence, it is relatively insensitive to phase jump. | With the number of the DSOGI used in the cross-feedback network increasing, it requires more DSP resource compared to SRF-PLL or DDSRF-PLL. | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, W.; Ouyang, S.; Xu, W. Improved Frequency Locked Loop Based Synchronization Method for Three-Phase Grid-Connected Inverter under Unbalanced and Distorted Grid Conditions. Energies 2019, 12, 1023. https://0-doi-org.brum.beds.ac.uk/10.3390/en12061023
Ma W, Ouyang S, Xu W. Improved Frequency Locked Loop Based Synchronization Method for Three-Phase Grid-Connected Inverter under Unbalanced and Distorted Grid Conditions. Energies. 2019; 12(6):1023. https://0-doi-org.brum.beds.ac.uk/10.3390/en12061023
Chicago/Turabian StyleMa, Wenjie, Sen Ouyang, and Weidong Xu. 2019. "Improved Frequency Locked Loop Based Synchronization Method for Three-Phase Grid-Connected Inverter under Unbalanced and Distorted Grid Conditions" Energies 12, no. 6: 1023. https://0-doi-org.brum.beds.ac.uk/10.3390/en12061023