A Hierarchical Self-Adaptive Method for Post-Disturbance Transient Stability Assessment of Power Systems Using an Integrated CNN-Based Ensemble Classifier


Abstract
:1. Introduction
- (1)
- A hierarchical self-adaptive framework based on CNN-based ensemble classifiers for post-disturbance TSA is proposed. This framework is verified with high prediction accuracy and reliability, and can balance the accuracy and rapidity of the transient stability prediction.
- (2)
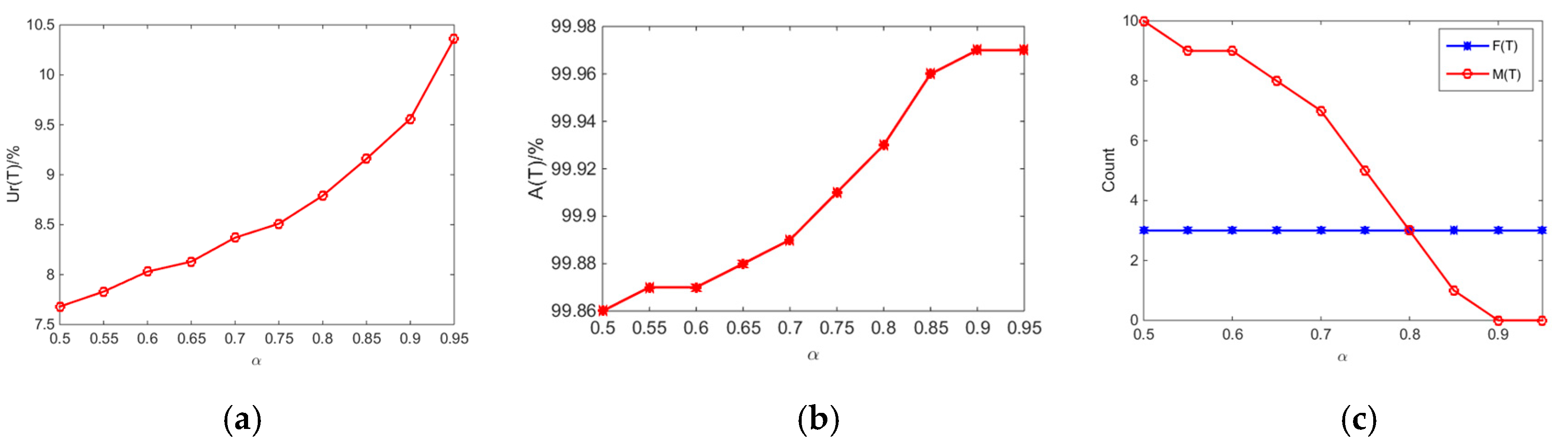
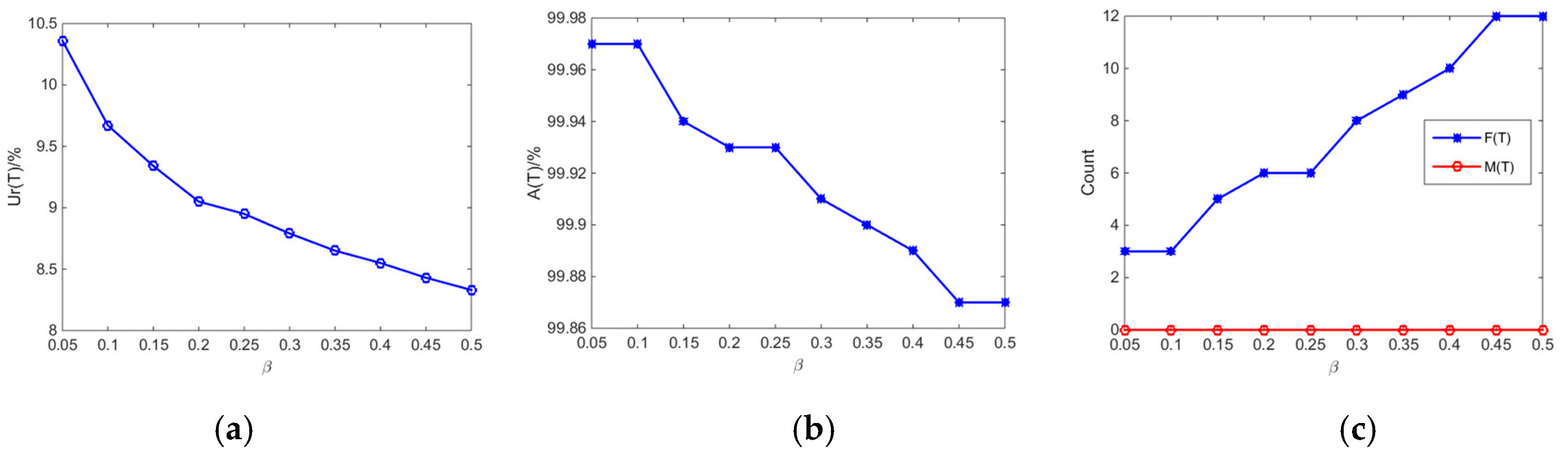
- A novel integrated decision-making rule based on multiple CNNs is presented. Through the suitable setting of thresholds, it can achieve as high prediction accuracy as possible, and no large false alarm (when predicting an actual stable instance as an unstable instance), with zero misdetection (when predicting an actual unstable instance as a stable instance).
- (3)
- Through regression modeling and predicting of transient stability index (TSI), it provides the stability degree of each instance, which is capable of providing a basis for subsequent emergency control.
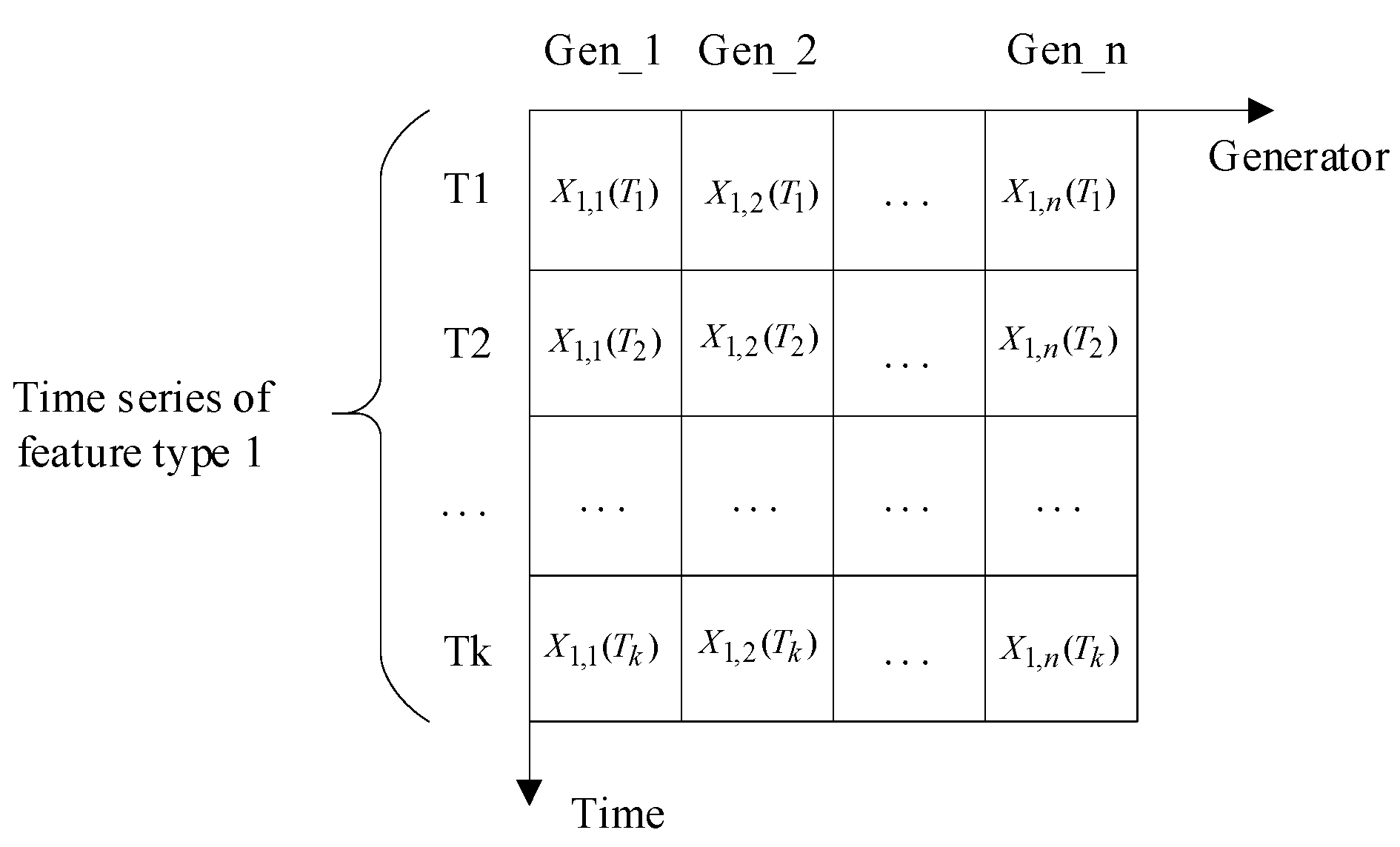
2. Generation of Dataset
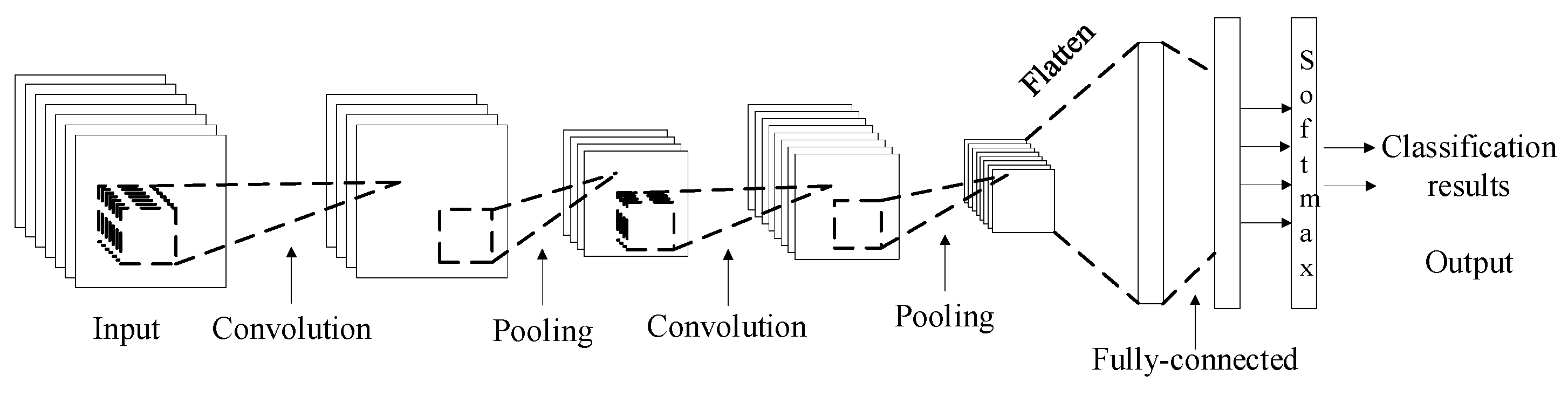
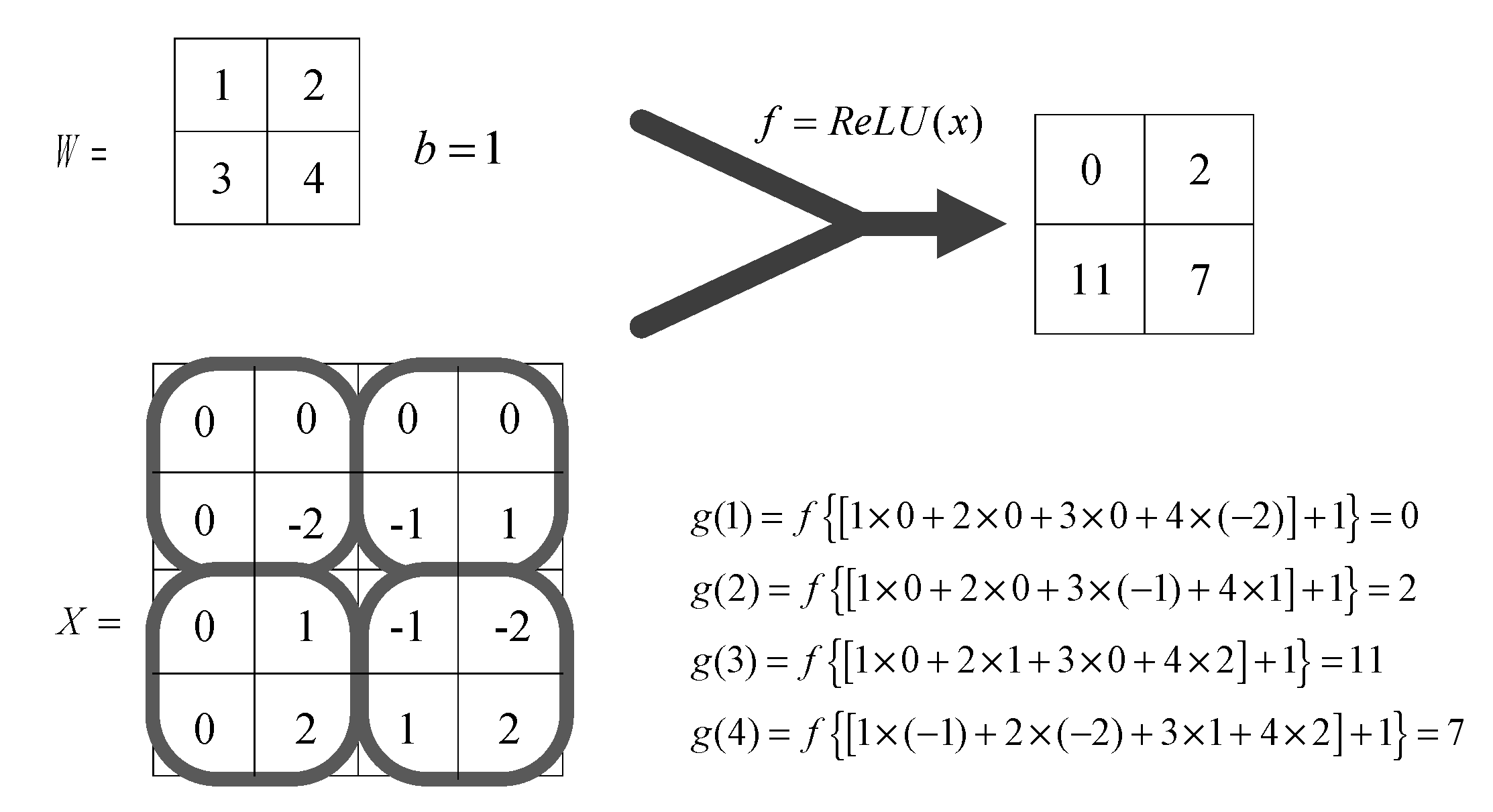
3. Convolutional Neural Network
4. The Proposed IS Model
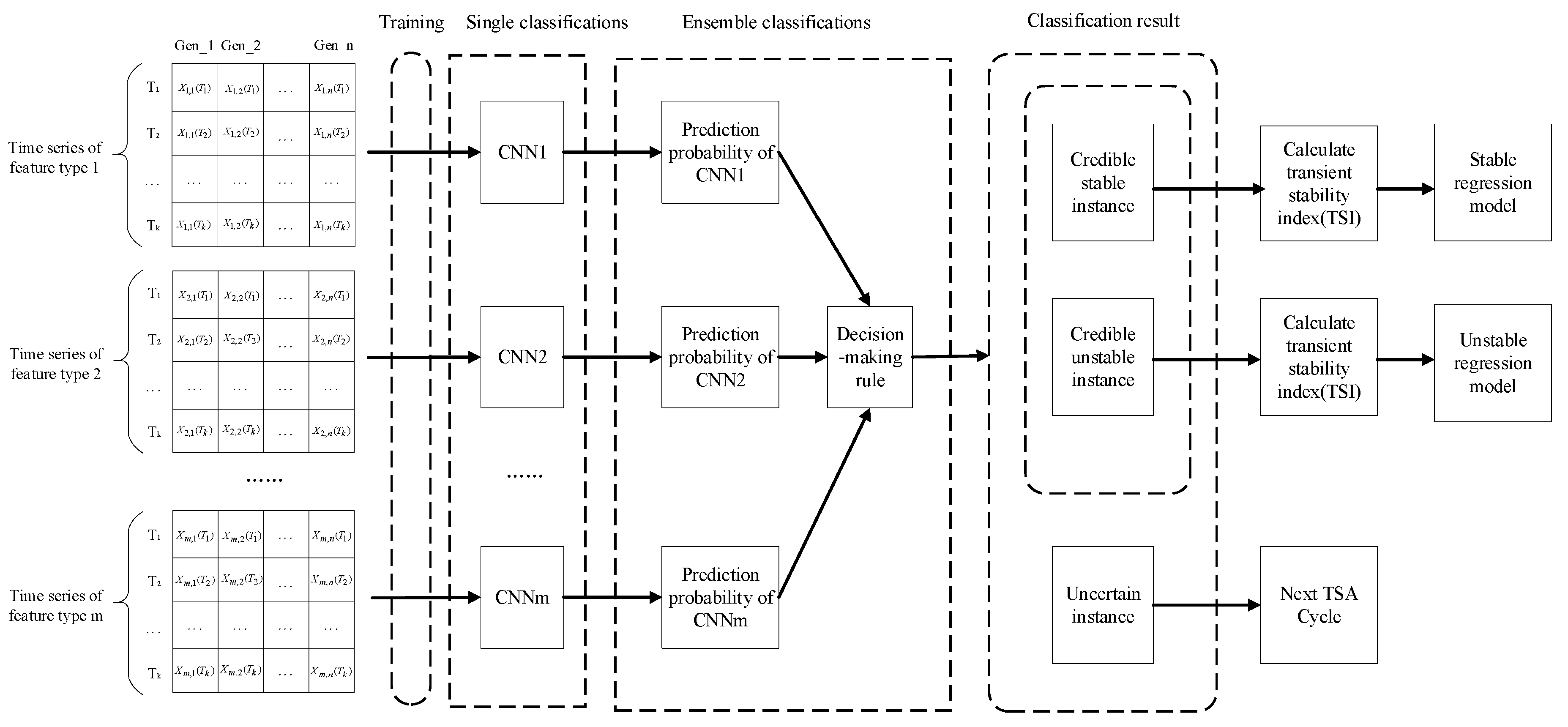
4.1. CNN-Based Ensemble Learning
4.2. Integrated Decision-Making Rule
| Algorithm 1: Integrated decision-making rule for CNN-based ensemble classification |
| Given m single CNNs with different types of input features, CNN1, CNN2, …, CNNm, whose first outputs are represented by , , …, : If , then it is a credible stable instance; Else if , then it is a credible unstable instance; Else it is an uncertain instance at the current decision time, where and are user-defined thresholds to judge whether the instance is credible stable/unstable or an uncertain instance. end |
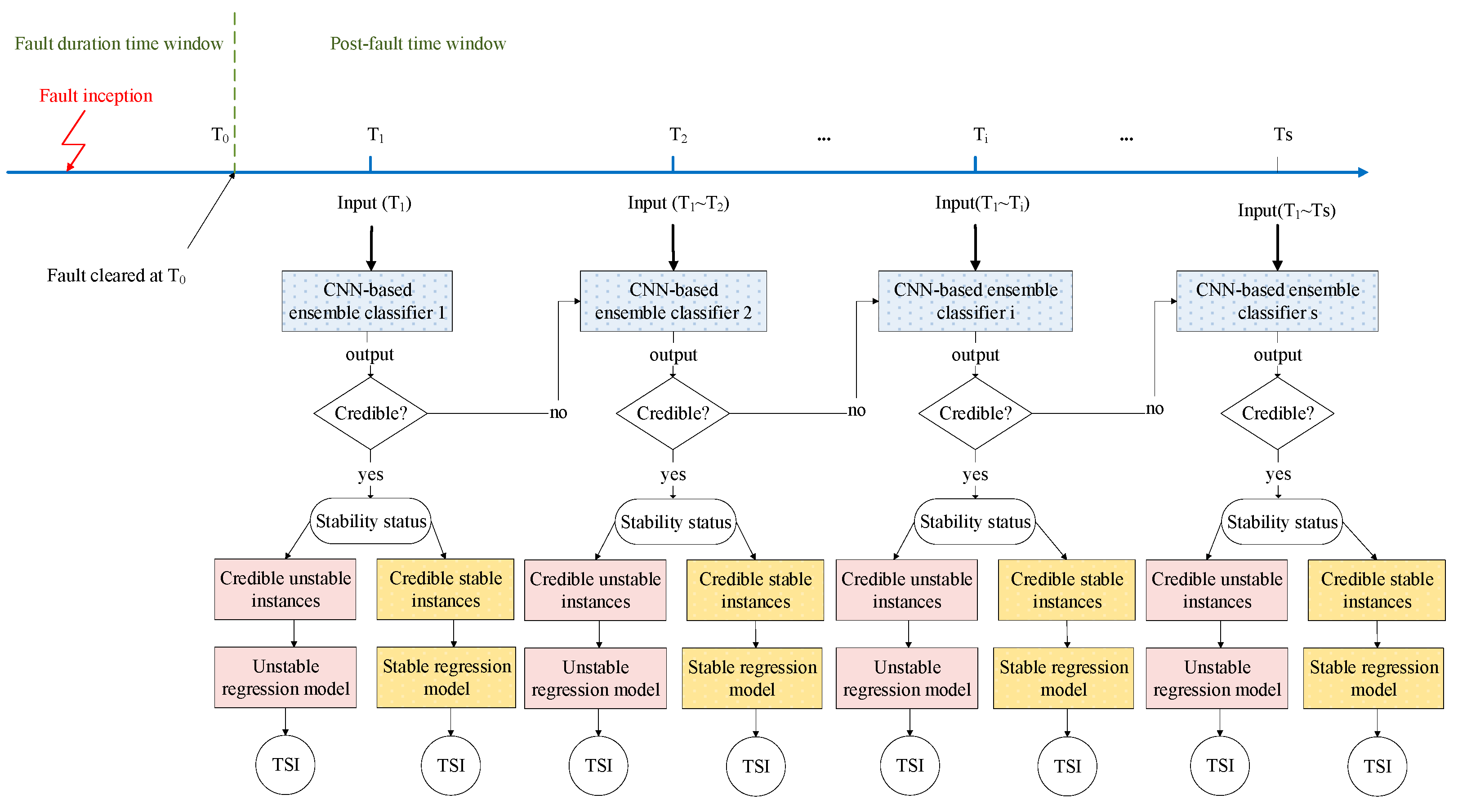
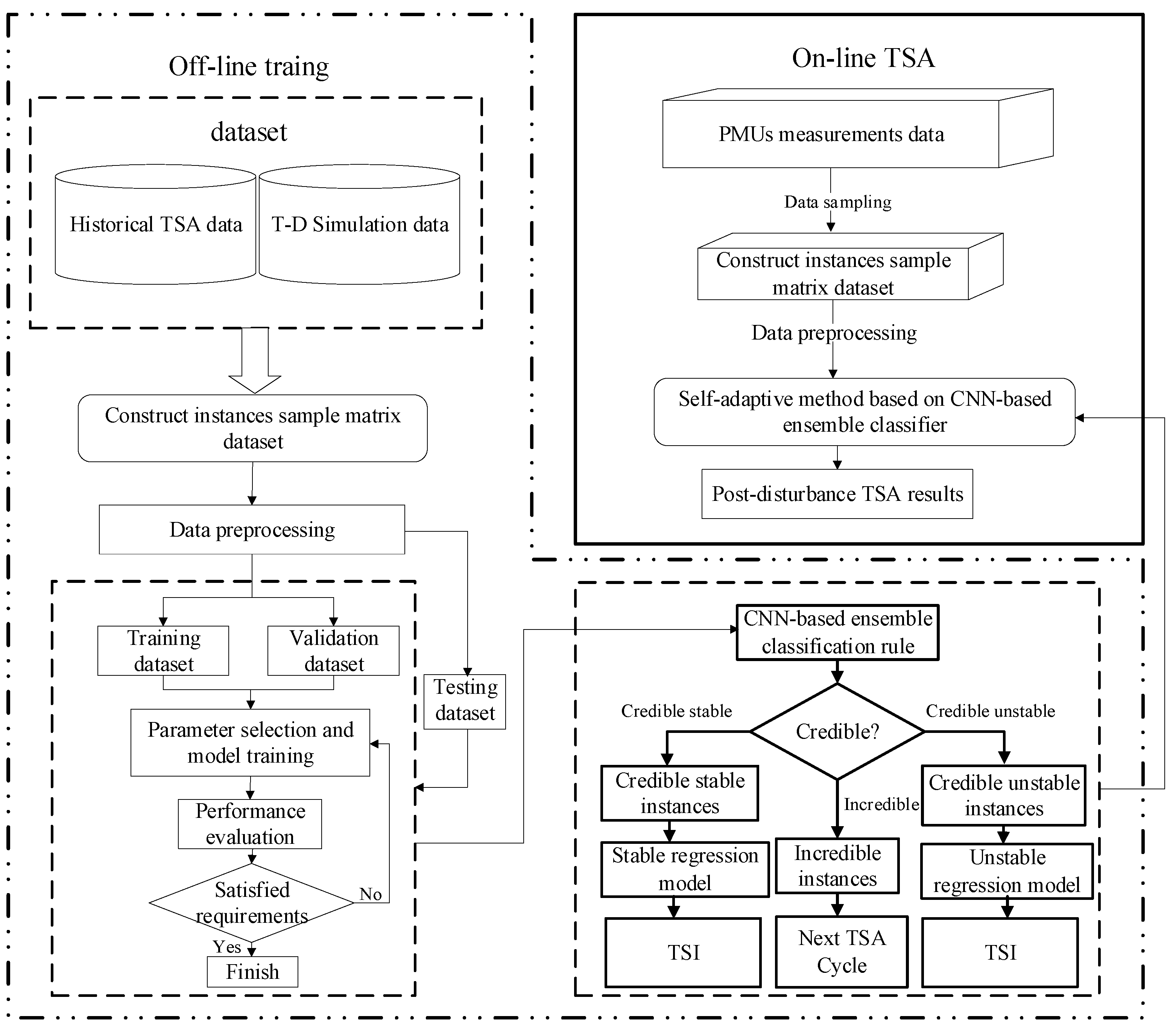
4.3. Hierarchical Self-Adaptive Method for TSA
5. Case Study
5.1. Data Generation
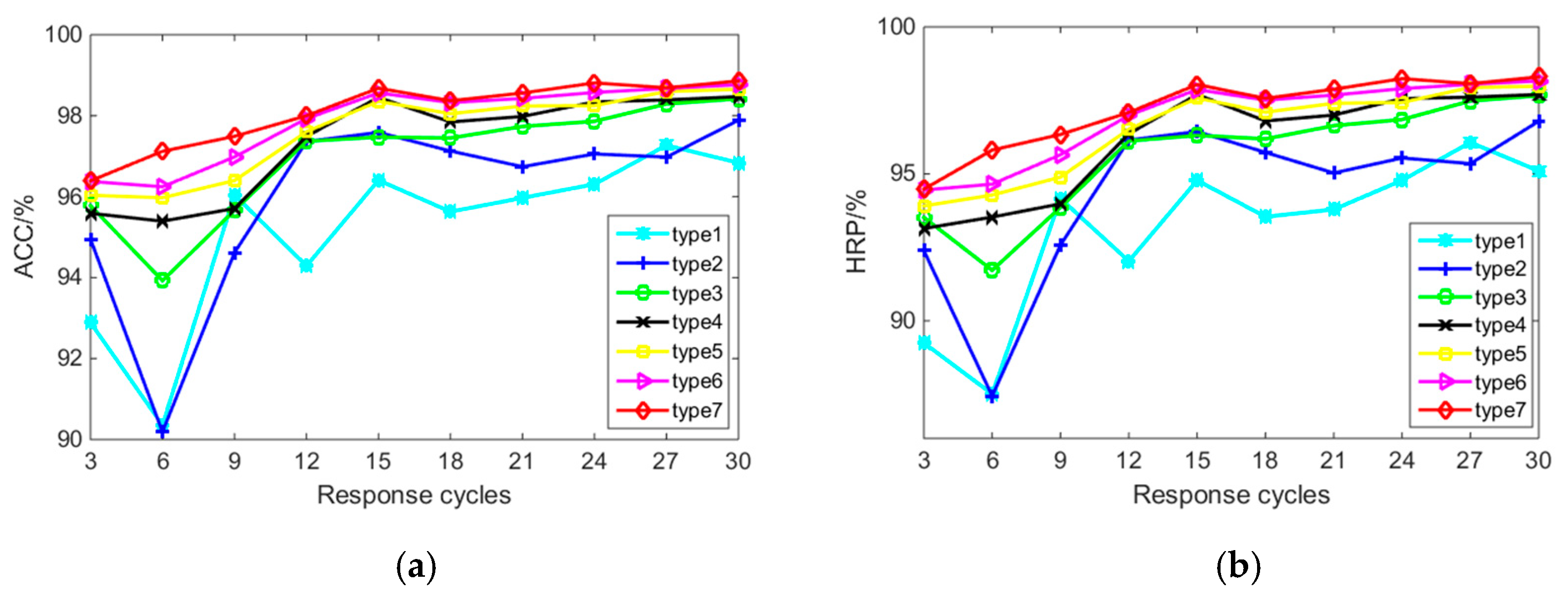
5.2. Indices for Performance Evaluation
- Accuracy, abbreviated as ACC, is the proportion of instances that are correctly predicted by the classifier.
- HRP is the abbreviation of harmonic mean of recall and precision. It is commonly used in evaluation classifiers.
5.3. Implementation Details
5.4. Parameter Determination
5.5. Hierarchical Self-Adaptive Method for Transient Stability Prediction
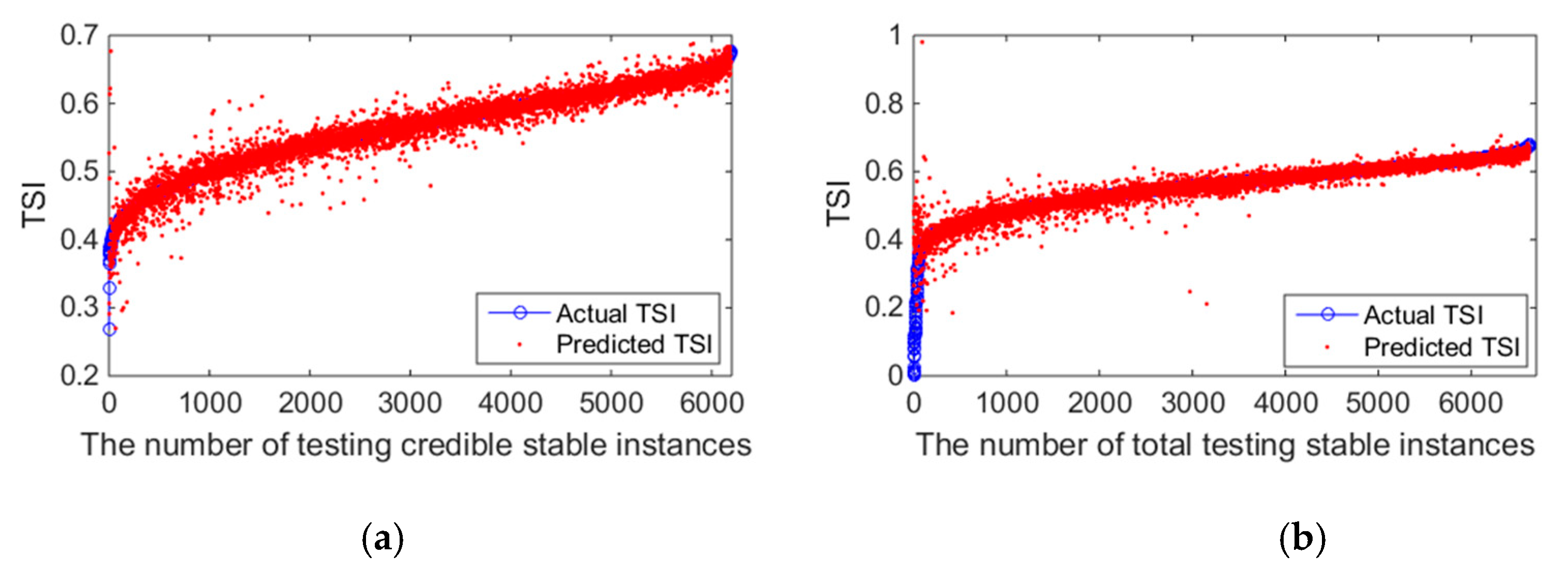
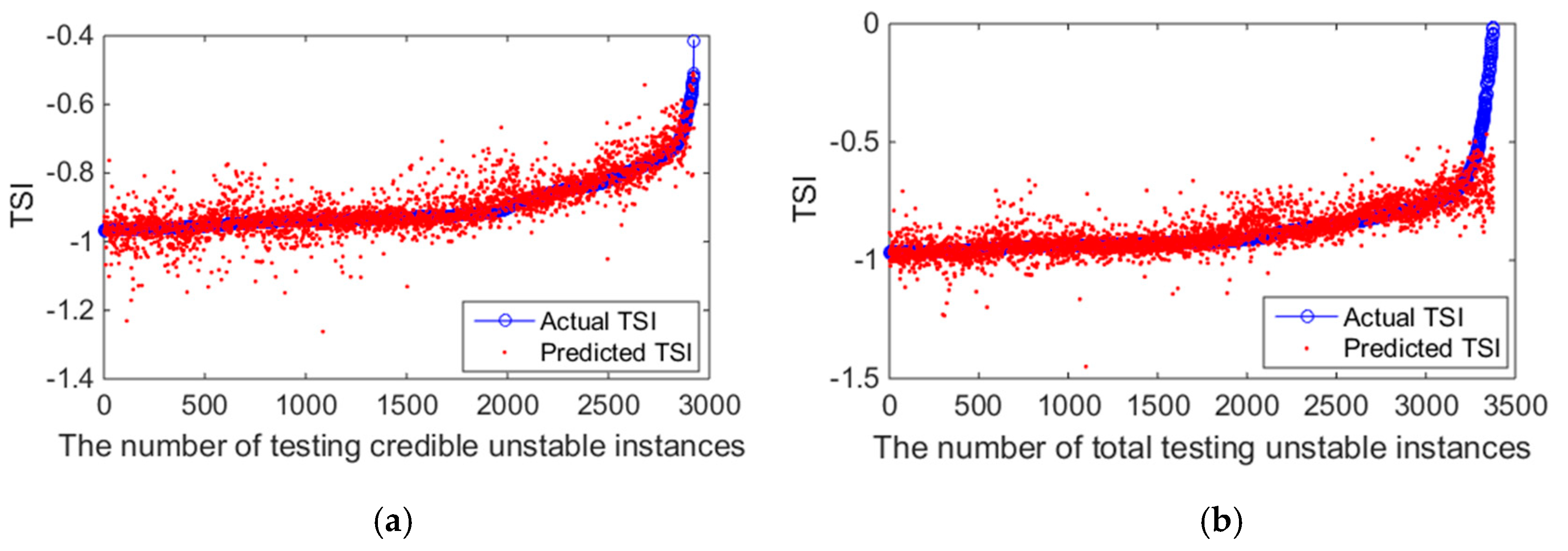
5.6. TSI Regression Results
6. Discussion
6.1. Construction and Incompleteness of Input Features
6.2. Classifier Updating for Performance Enhancement
6.3. Increment of System Size
6.4. Misdetections and False Alarms
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

Appendix C

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Filter Size/Stride | Filter Number | Padding |
|---|---|---|---|
| Input Layer | - | - | - |
| Convolution Layer 1 | 32 | Same | |
| Max pooling Layer 1 | 32 | Same | |
| Convolution Layer 2 | 64 | Same | |
| Max pooling Layer 2 | 64 | Same | |
| Fully-connected Layer 1 | 120 | - | - |
| Fully-connected Layer 2 | 30 | - | - |
| Output Layer | 2 | - | - |
Appendix D
| Algorithm A1. Hierarchical Self-adaptive Post-disturbance TSA |
| 1: Input input features and labels |
| 2: Normalize 7 kinds of input features |
| 3: Given 7 single CNNs with different types of input features: CNN1, CNN2,…, CNN7, whose first outputs are represented by , ,…, ; Ti, i = 1, 2,…, s, is response time |
| 4: for i = 1:s |
| 5: do |
| 6: Train 7 individual CNNs with each kind time-series input feature |
| corresponding to T1 to Ti, use the integrated decision-making rule for CNN based ensemble classification on the 7 outputs of each remained uncertain instance in testing dataset |
| 7: if |
| 8: credible stable instance, send into stable regression model to predict TSI |
| 9: else if |
| 10: credible unstable instance, send into unstable regression model to predict TSI |
| 11: else it is an uncertain instance at the current decision time |
| 12: if the number of remained uncertain instances is zero |
| 13: break |
| 14 end |
| 15: Output predicted stability status and stability degree TSI |
| Algorithm A2. CNN Training Process |
| 1: Input normalized input features and labels 2: Initialize weights and bias of the network randomly 3: The input data is forwardly propagated through the convolutional layer, the max-pooling layer, and the fully connected layer to obtain an output value 4: Calculate the error between the output value of the network and the target value 5: Adjust the network connection weights and bias by mini-batch stochastic gradient descent and back propagation to minimize the loss function 6: The weights and bias are updated according to the obtained error. Then go to the second step 7: End training when the error is equal to or less than our expected value |

References
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability. IEEE Trans. Power Syst. 2014, 19, 1387–1401. [Google Scholar]
- Xu, Y.; Dong, Z.Y.; Meng, K.; Zhang, R.; Wong, K.P. Real-time transient stability assessment model using extreme learning machine. IET Gener. Transm. Distrib. 2011, 5, 314–322. [Google Scholar] [CrossRef]
- Xu, Y.; Dong, Z.Y.; Zhao, J.H.; Zhang, P.; Wong, K.P. A reliable intelligent system for real-time dynamic security assessment of power systems. IEEE Trans. Power Syst. 2012, 27, 1253–1263. [Google Scholar] [CrossRef]
- Zhu, Q.M.; Chen, J.F.; Zhu, L.; Shi, D.Y.; Bai, X.; Duan, X.Z.; Liu, Y.L. A deep end-to-end model for transient stability assessment with PMU data. IEEE Access 2018, 6, 65474–65487. [Google Scholar] [CrossRef]
- Yu, J.J.Q.; Hill, D.J.; Lam, A.Y.S.; Gu, J.T.; Li, V.O.K. Intelligent time-adaptive transient stability assessment system. IEEE Trans. Power Syst. 2018, 33, 1049–1058. [Google Scholar] [CrossRef]
- Zhu, Q.M.; Dang, J.; Chen, J.F.; Xu, Y.P.; Li, Y.H.; Duan, X.Z. A method for power system transient stability assessment based on deep belief network. Proc. CSEE 2018, 38, 735–743. [Google Scholar]
- Zhang, R.Y.; Wu, J.Y.; Shao, M.Y.; Li, B.Q.; Lu, Y.Z. Transient stability prediction of power systems based on deep belief networks. In Proceedings of the IEEE Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 1–6. [Google Scholar]
- Zadkhast, S.; Jatskevich, J.; Vaahedi, E. A multi-decomposition approach for accelerated time-domain simulation of transient stability problems. IEEE Trans. Power Syst. 2015, 30, 2301–2311. [Google Scholar] [CrossRef]
- Bhui, P.; Senroy, N. Real-time prediction and control of transient stability using transient energy function. IEEE Trans. Power Syst. 2017, 32, 923–934. [Google Scholar] [CrossRef]
- Chiodo, E.; Lauria, D. Transient stability evaluation of multi-machine power systems: A probabilistic approach based upon the extended equal area criterion. IET Gener. Transm. Distrib. 1994, 141, 545–553. [Google Scholar] [CrossRef]
- Zhou, Y.Z.; Guo, Q.L.; Sun, H.B.; Yu, Z.H.; Wu, J.Y.; Hao, L.L. A novel data-driven approach for transient stability prediction of power systems considering the operational variability. Int. J. Electr. Power Energy Syst. 2019, 107, 379–394. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Z. Application of EOS-ELM with binary jaya-based feature selection to real-time transient stability assessment using PMU data. IEEE Access 2017, 5, 23092–23101. [Google Scholar] [CrossRef]
- You, D.H.; Wang, K.; Ye, L.; Wu, J.C.; Huang, R.Y. Transient stability assessment of power system using support vector machine with generator combinatorial trajectories inputs. Int. J. Electr. Power Energy Syst. 2013, 44, 318–325. [Google Scholar] [CrossRef]
- Zhang, R.; Xu, Y.; Dong, Z.Y.; Wong, K.P. Post-disturbance transient stability assessment of power systems by a self-adaptive intelligent system. IET Gener. Transm. Distrib. 2015, 9, 296–305. [Google Scholar] [CrossRef]
- Ree, J.D.L.; Centeno, V.; Thorp, J.S.; Phadke, A.G. Synchronized phasor measurement application in power system. IEEE Smart Grid. 2010, 1, 21–27. [Google Scholar]
- Kamwa, I.; Grondin, R.; Loud, L. Time-varying contingency screening for dynamic security assessment using intelligent systems techniques. IEEE Trans. Power Syst. 2001, 16, 526–536. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y. Convolutional networks for images, speech, and time series. In The Handbook of Brain Theory and Neural Networks; MIT Press: Cambridge, MA, USA, 1995; Volume 3361, pp. 1995–2009. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Gupta, A.; Gurrala, G.; Sastry, P.S. An online power system stability monitoring system using convolutional neural networks. IEEE Trans. Power Syst. 2019, 34, 864–872. [Google Scholar] [CrossRef]
- Zhou, Y.Z.; Wu, J.Y.; Yu, Z.H.; Ji, L.Y.; Hao, L.L. A hierarchical method for transient stability prediction of power systems using the confidence of a SVM-based ensemble classifier. Energies 2016, 9, 778. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Xu, Y.; Dong, Z.Y.; Zhang, R. A hierarchical self-adaptive data-analytics method for real-time power system short-term voltage stability assessment. IEEE Trans. Ind. Inform. 2019, 15, 74–84. [Google Scholar] [CrossRef]
- Zhou, Y.Z.; Zhao, W.L.; Guo, Q.L.; Sun, H.B.; Hao, L.L. Transient stability assessment of power systems using cost-sensitive deep learning approach. In Proceedings of the IEEE Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 1–6. [Google Scholar]
- Bishop, C. Pattern Recognition and Machine Learning (Information Science and Statistics Series); Springer: Berlin, Germany, 2006; Available online: https://books.google.it/books?id=kTNoQgAACAAJ (accessed on 14 August 2019).
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.Z.; Wu, J.Y.; Hao, L.L.; Ji, L.Y.; Yu, Z.H. Transient stability prediction of power systems using post-disturbance rotor angle trajectory cluster features. Electr. Power Compon. Syst. 2016, 44, 1879–1891. [Google Scholar] [CrossRef]
- Ji, L.Y.; Wu, J.Y.; Zhou, Y.Z.; Hao, L.L. Using trajectory clusters to define the most relevant features for transient stability prediction based on machine learning method. Energies 2016, 9, 898. [Google Scholar] [CrossRef]
- Zhou, Y.Z.; Sun, H.B.; Guo, Q.L.; Xu, B.; Wu, J.Y.; Hao, L.L. Data driven method for transient stability prediction of power systems considering incomplete measurements. In Proceedings of the IEEE Energy Internet and Energy System Integration (EI2), Beijing, China, 27–28 November 2017; pp. 1–6. [Google Scholar]
- Hansen, L.K.; Salamon, P. Neural network ensemble. IEEE Trans. Patter Anal. Mach. Intell. 1990, 12, 993–1001. [Google Scholar] [CrossRef]
- Breiman, L. Random foresrts. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Boopathi, V.; Subramaniyam, S.; Malik, A.; Lee, G.; Manavalan, B.; Yang, D.C. mACPpred: A support vector machine-based meta-predictor for identification of anticancer peptides. Int. J. Mol. Sci. 2019, 20, 1964. [Google Scholar] [CrossRef] [PubMed]
- Manavalan, B.; Basith, S.; Shin, T.H.; Wei, L.; Lee, G. Meta-4mCpred: A sequence-based meta-predictor for accurate DNA 4mC site prediction using effective feature representation. Mol. Ther. Nucleic Acids 2019, 16, 733–744. [Google Scholar] [CrossRef] [PubMed]
- Manavalan, B.; Basith, S.; Shin, T.H.; Wei, L.; Lee, G. mAHTPred: A sequence-based meta-predictor for improving the prediction of anti-hypertensive peptides using effective feature representation. Bioinformatics 2018, in press. [Google Scholar] [CrossRef] [PubMed]
- Manavalan, B.; Basith, S.; Shin, T.H.; Wei, L.; Lee, G. AtbPpred: A Robust Sequence-Based Prediction of Anti-Tubercular Peptides Using Extremely Randomized Trees. Comput. Struct. Biotechnol. J. 2019, 17, 972–981. [Google Scholar] [CrossRef] [PubMed]
- Kamwa, I.; Samantary, S.R.; Joos, G. Catastrophe predictors from ensemble decision-tree learning of wide-area severity indices. IEEE Trans. Smart Grid. 2010, 1, 144–157. [Google Scholar] [CrossRef]
- Tian, F.; Zhou, X.X.; Shi, D.Y.; Chen, Y.; Huang, Y.H.; Yu, Z.H. Power system transient assessment based on comprehensive convolutional neural network model and steady-state features. Proc. CSEE 2019. accepted. [Google Scholar]
- Zhou, Y. Transient Stability Analysis and Preventive Control of Power Systems Based on Data Mining Technique; Beijing Jiaotong University: Beijing, China, 2017; pp. 135–137. [Google Scholar]
- Zheng, Z.Y.; Liang, B.W. TensorFlow Practical Application Google Deep Learning Framework, 2nd ed.; Publishing House of Electronics Industry: Beijing, China, 2018; pp. 85–87. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- He, M.; Vittal, V.; Zhang, J.S. Online dynamic security assessment with missing PMU measurements: A data mining approach. IEEE Trans. Power Syst. 2013, 28, 1969–1977. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Xu, Y.; Dong, Z.Y. Robust ensemble data analytic for incomplete PMU measurements-based power system stability assessment. IEEE Trans. Power Syst. 2018, 33, 1124–1126. [Google Scholar] [CrossRef]
- Guo, T.Y.; Milanovic, J.V. The effect of quality and availability of measurement signals on accuracy of on-line prediction of transient stability using decision tree method. In Proceedings of the Innovative Smart Grid Technologies Europe IEEE, Lyngby, Denmark, 6–9 October 2013. [Google Scholar]
- Li, Q.Q.; Xu, Y.; Ren, C.; Zhao, J. A hybrid data-driven method for online power system dynamic security assessment with incomplete PMU measurements. In Proceedings of the IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019. [Google Scholar]
- Ren, C.; Xu, Y. A fully data-driven method based on generative adversarial networks for power system dynamic security assessment with missing data. IEEE Trans. Power Syst. 2019. [Google Scholar] [CrossRef]










| Feature Type | Feature Name | Feature Number | Description |
|---|---|---|---|
| 1 | Voltage magnitude | = 1, …, n; s = 1, …, k | |
| 2 | Relative rotor angle | = 1, …, n; s = 1, …, k | |
| 3 | Relative rotor speed | = 1, …, n; s = 1, …, k | |
| 4 | Relative rotor acceleration | = 1, …, n; s = 1, …, k | |
| 5 | Relative kinetic energy | = 1, …, n; s = 1, …, k | |
| 6 | Electromagnetic power | = 1, …, n; s = 1, …, k | |
| 7 | Relative electromagnetic power | = 1, …, n; s = 1, …, k |
| Confusion Matrix | Stable (Actual) | Unstable (Actual) |
|---|---|---|
| Stable (Predicted) | ||
| Unstable (Predicted) |
| i (Cycles) | Response Time (s) | Classified as Stable | Classified as Unstable | A(Ti) (%) | A(T) (%) | U(T) | Ur(T) (%) | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| CS(T) | M(Ti) | M(T) | CU(T) | F(Ti) | F(T) | ||||||
| 0 | 0 | - | - | - | - | - | - | - | - | 10,000 | 100 |
| 3 | 0.05 | 4265 | 0 | 0 | 1991 | 0 | 0 | 100 | 100 | 3744 | 37.44 |
| 6 | 0.10 | 516 | 0 | 0 | 251 | 0 | 0 | 100 | 100 | 2977 | 29.77 |
| 9 | 0.15 | 363 | 0 | 0 | 271 | 2 | 2 | 99.68 | 99.97 | 2343 | 23.43 |
| 12 | 0.20 | 276 | 0 | 0 | 214 | 1 | 3 | 99.80 | 99.96 | 1853 | 18.53 |
| 15 | 0.25 | 255 | 0 | 0 | 101 | 0 | 3 | 100 | 99.96 | 1497 | 14.97 |
| 18 | 0.30 | 110 | 0 | 0 | 34 | 0 | 3 | 100 | 99.97 | 1353 | 13.53 |
| 21 | 0.35 | 174 | 0 | 0 | 8 | 0 | 3 | 100 | 99.97 | 1171 | 11.71 |
| 24 | 0.40 | 42 | 0 | 0 | 22 | 0 | 3 | 100 | 99.97 | 1107 | 11.07 |
| 27 | 0.45 | 84 | 0 | 0 | 10 | 0 | 3 | 100 | 99.97 | 1013 | 10.13 |
| 30 | 0.50 | 102 | 0 | 0 | 24 | 0 | 3 | 100 | 99.97 | 887 | 8.87 |
| (Cycles) | Response Time (s) | Total Testing Stable Instances | Total Testing Unstable Instances |
|---|---|---|---|
| 0 | 0 | - | - |
| 3 | 0.05 | 0.0021 | 0.0103 |
| 6 | 0.10 | 0.0019 | 0.0101 |
| 9 | 0.15 | 0.0019 | 0.0098 |
| 12 | 0.20 | 0.0018 | 0.0095 |
| 15 | 0.25 | 0.0011 | 0.0045 |
| 18 | 0.30 | 0.0017 | 0.0092 |
| 21 | 0.35 | 0.0016 | 0.0091 |
| 24 | 0.40 | 0.0015 | 0.0088 |
| 27 | 0.45 | 0.0015 | 0.0083 |
| 30 | 0.50 | 0.0014 | 0.0080 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Wu, J.; Xu, Y.; Li, B.; Shao, M. A Hierarchical Self-Adaptive Method for Post-Disturbance Transient Stability Assessment of Power Systems Using an Integrated CNN-Based Ensemble Classifier. Energies 2019, 12, 3217. https://0-doi-org.brum.beds.ac.uk/10.3390/en12173217
Zhang R, Wu J, Xu Y, Li B, Shao M. A Hierarchical Self-Adaptive Method for Post-Disturbance Transient Stability Assessment of Power Systems Using an Integrated CNN-Based Ensemble Classifier. Energies. 2019; 12(17):3217. https://0-doi-org.brum.beds.ac.uk/10.3390/en12173217
Chicago/Turabian StyleZhang, Ruoyu, Junyong Wu, Yan Xu, Baoqin Li, and Meiyang Shao. 2019. "A Hierarchical Self-Adaptive Method for Post-Disturbance Transient Stability Assessment of Power Systems Using an Integrated CNN-Based Ensemble Classifier" Energies 12, no. 17: 3217. https://0-doi-org.brum.beds.ac.uk/10.3390/en12173217