4.1. Single-Train
- (a)
Related Parameters
Taking the section between Chigang Station and Kecun Station of Guangzhou Metro Line 8 as the test line, the total length and planned trip time are 1.489 km and 96 s, respectively. The line conditions are shown in
Table 2.
In addition, the metro vehicle of Guangzhou Metro Line 8 is A-Type produced by CRRC Corporation Limited, which has the best passenger capacity. The vehicle marshalling type is 4M2T (A-B-C-C-B-A) and is shown as follows:
In
Figure 13, A is a trailer with driver’s room, B is a motor train with pantograph, and C is a motor train, which weigh 37.3 t, 40.6 t, and 40.6 t, respectively. In AW2 case, the total mass of a train is 339.6 t.
According to the official product data sheet, the weighted average rotary mass coefficient
ρ and the conversion efficiency of traction system
ηt are given as
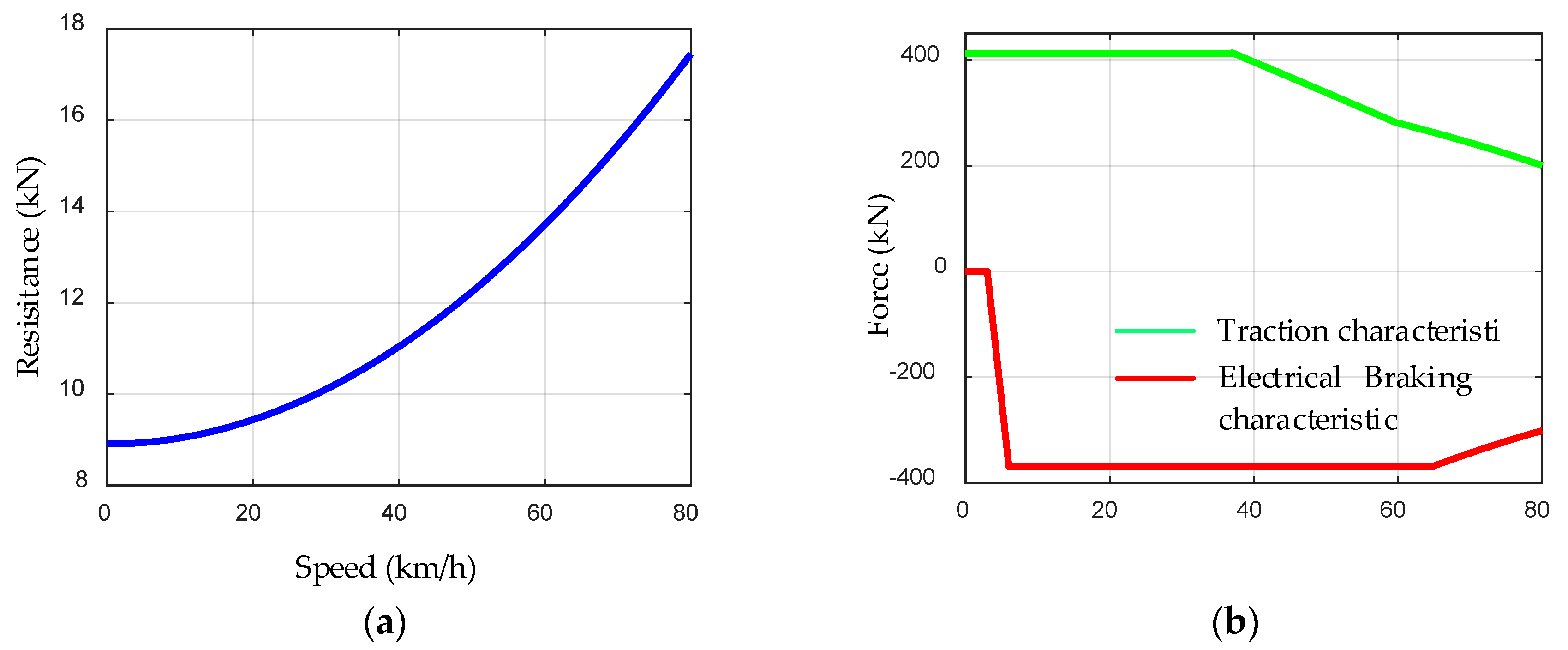
The basis running resistance corresponding to the speed
v(
s) is
The characteristic curve of basis running resistance and the maximum traction/braking force corresponding to the speed
v(
s) are shown in
Figure 14:
- (b)
Result
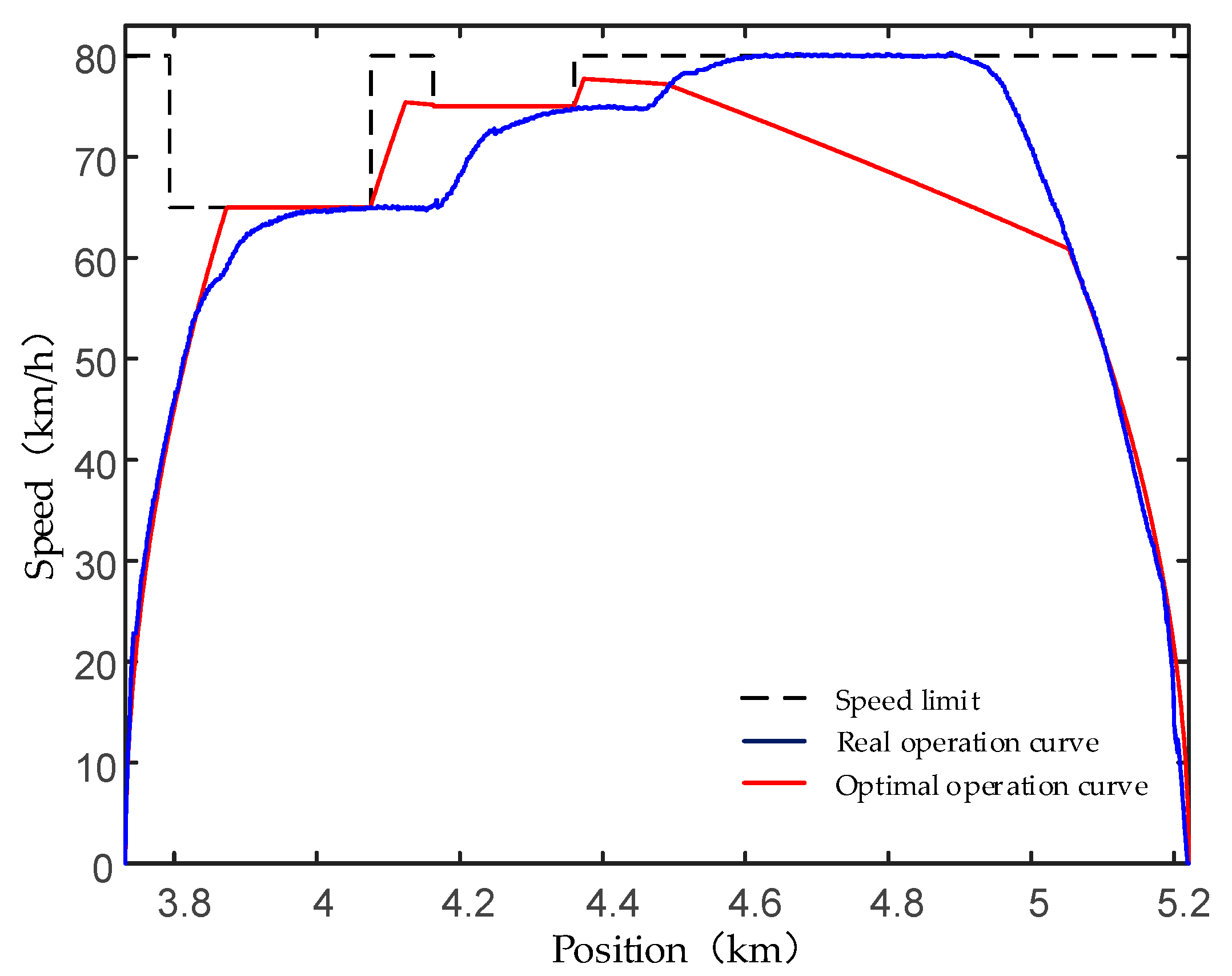
On the basis of the proposed method, the test line mentioned above is taken for simulation and a transition speed of 76.7 km/h is worked out. The optimal operation curve and real operation curve are shown in
Figure 15. The measured data of the real operation process are collected by the onboard device of Guangzhou Metro Line 8, and the sampling interval of speed and traction/braking force is 1 s. Besides, the total energy consumption of real running process
Jreal can be obtained as follows:
where
Pti is the traction power of train; Δ
t is the sampling interval;
N is the sample count that can be obtained by
N =
T/Δ
t; and
Fti and
vi are the traction force and speed of train, respectively.
The comparison of energy consumption between optimal operation and real operation is shown in
Table 3. The total traction energy consumption of optimal operation mode is 24.23 kWh, and a 14.08% energy-saving rate can be obtained compared with the energy consumption of real operation.
4.2. Multi-Train
- (a)
Related Parameters
The three successive stations of the test line are Wanshengwei Station, Pazhou Station, and Xingangdong Station by sequence of Guangzhou Metro Line 8. The line conditions are shown in
Table 4 and the operation parameters are shown in
Table 5.
- (b)
Result for the Flat Route
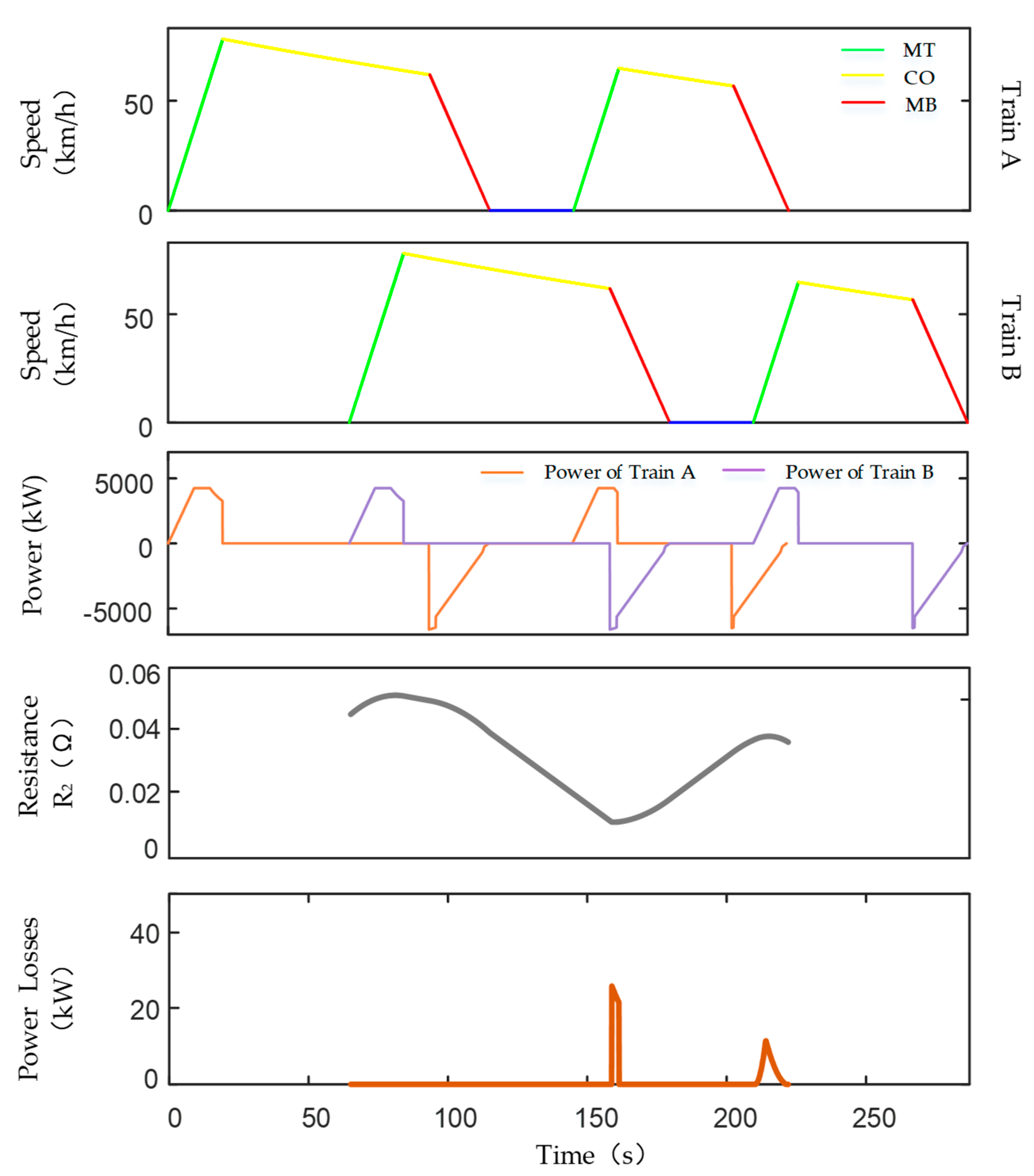
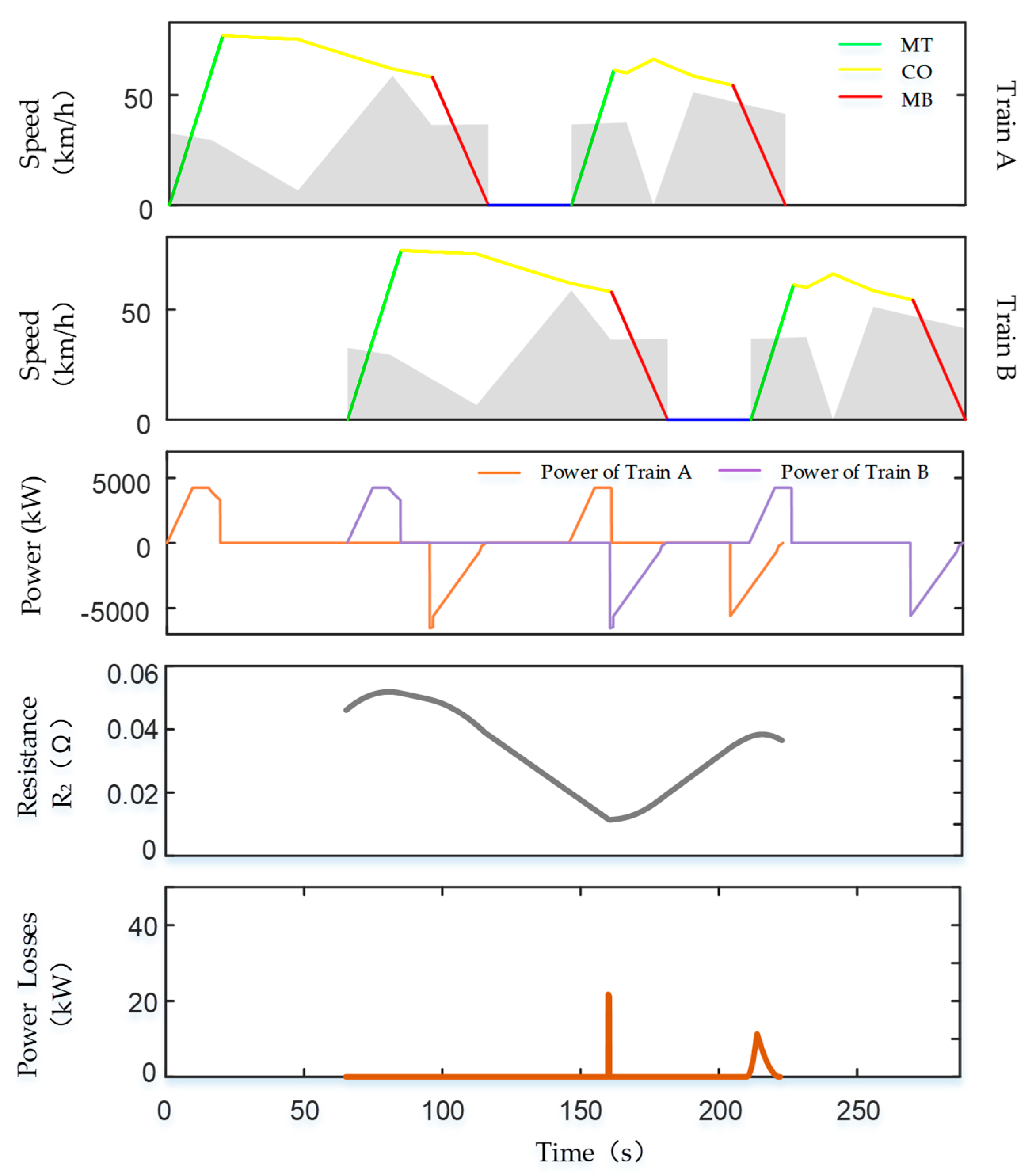
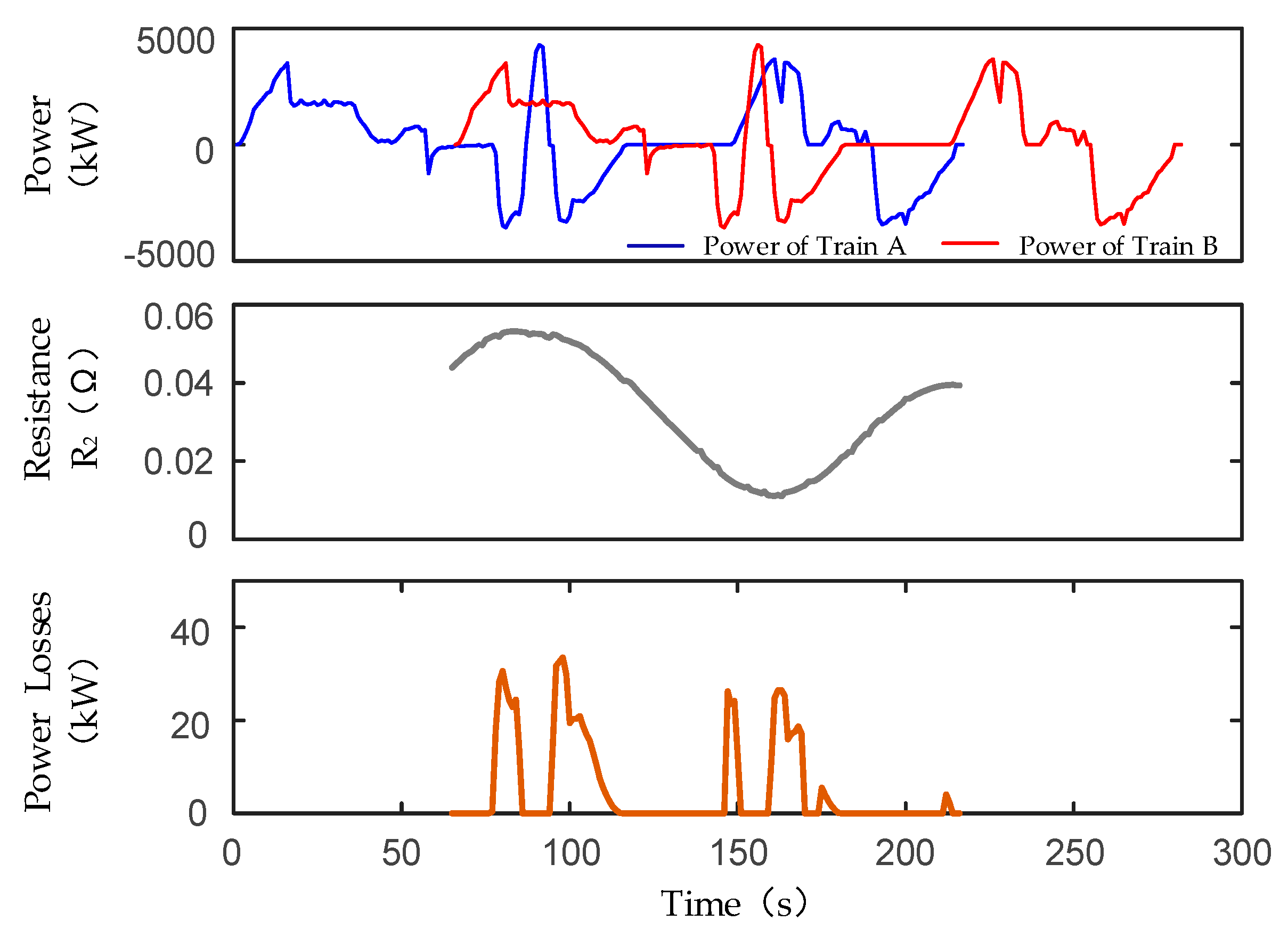
Simulation on flat route is conducted to demonstrate the effectiveness of the proposed method. The single-train optimal operation curve of the multi-train system is shown in
Figure 16. The transition speed from MT to CO of the two trains in the two sections are 77.9 km/h and 64.6 km/h, respectively. It can be observed from power curves of two trains that the regenerative energy cannot be effectively absorbed for the single-train optimal operation mode. Besides, corresponding results with dynamic losses of recovered regenerative energy on the catenary are also shown, from which the resistance
R2 and the power losses between two trains of the catenary can be clearly observed.
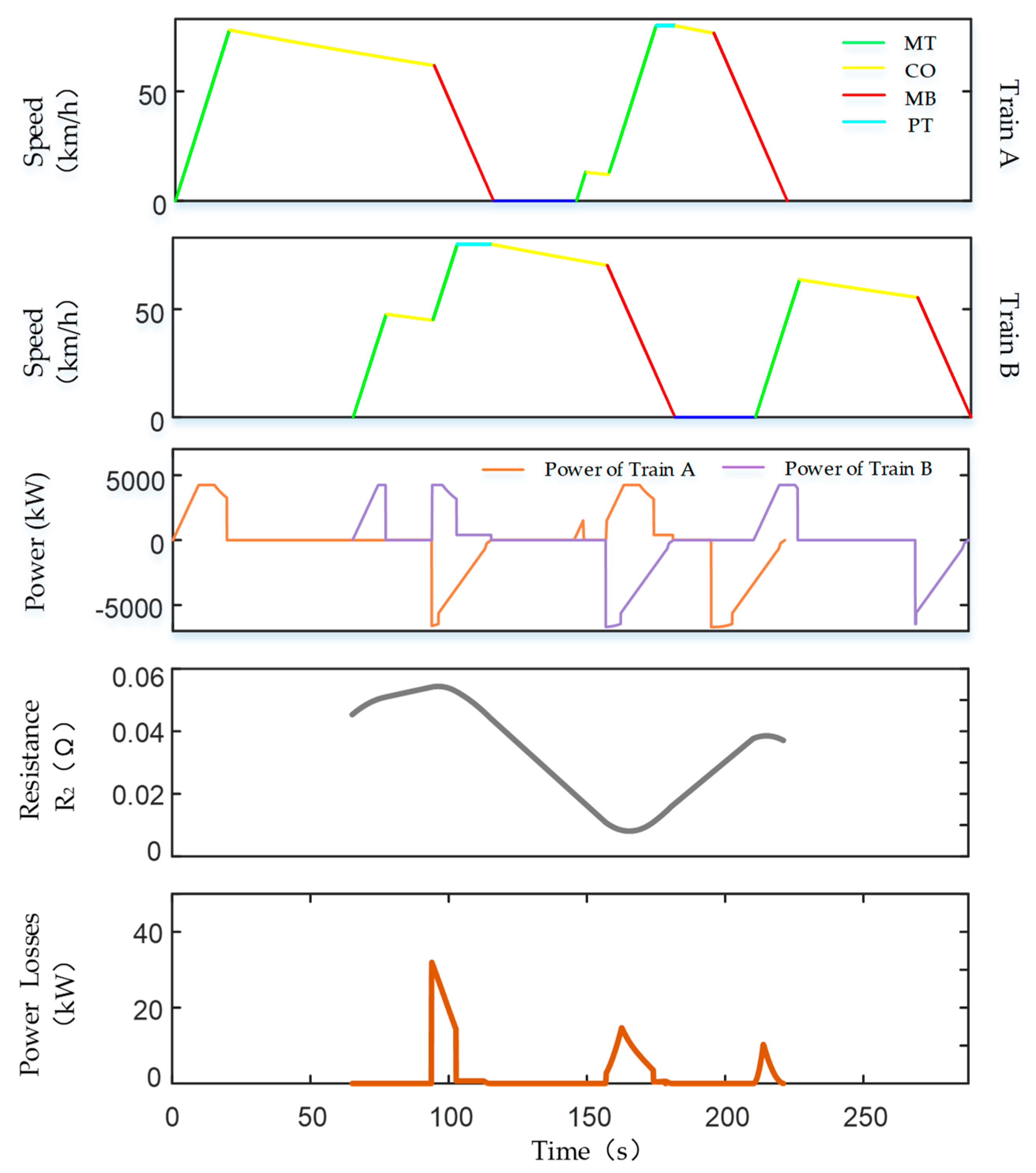
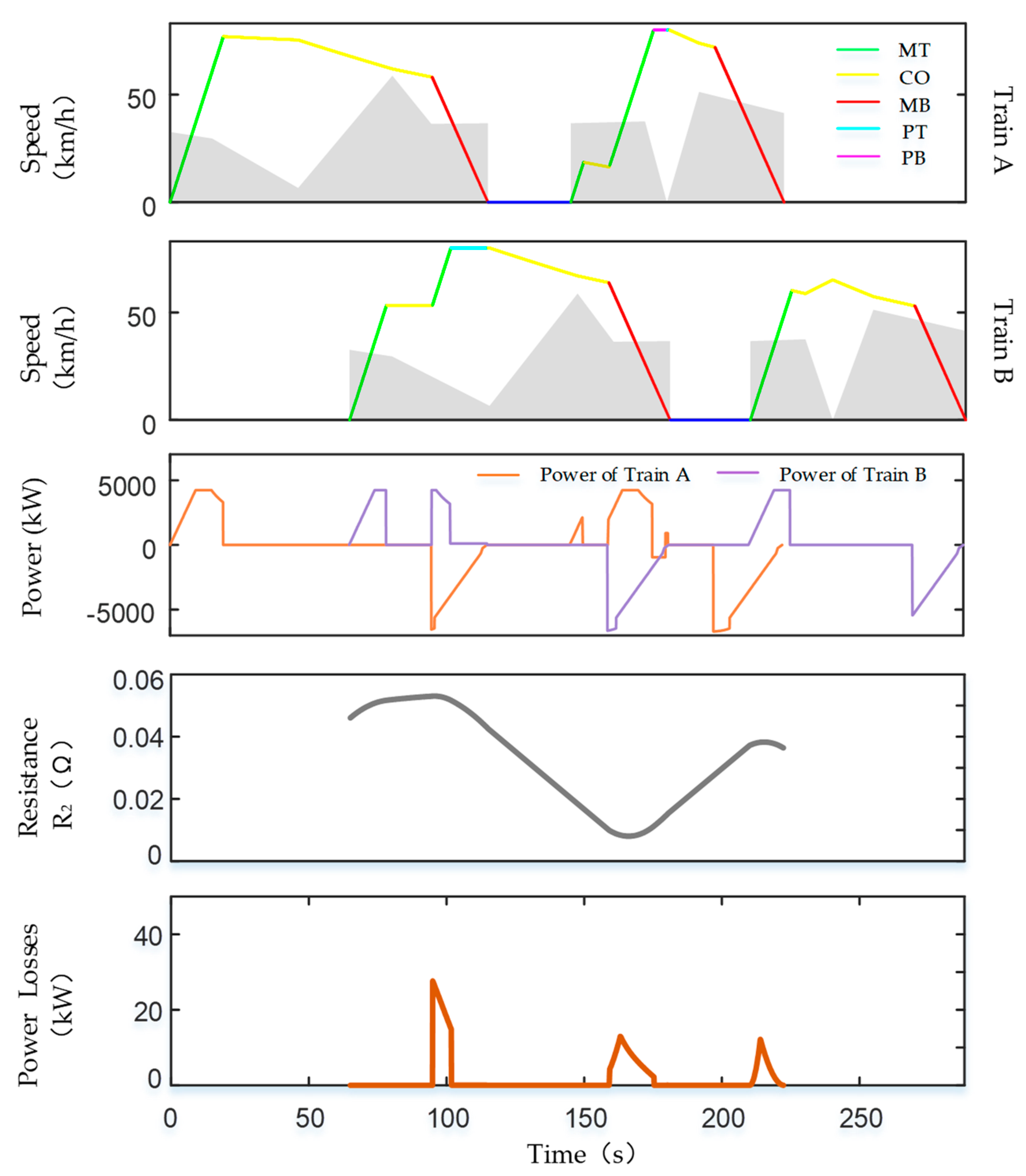
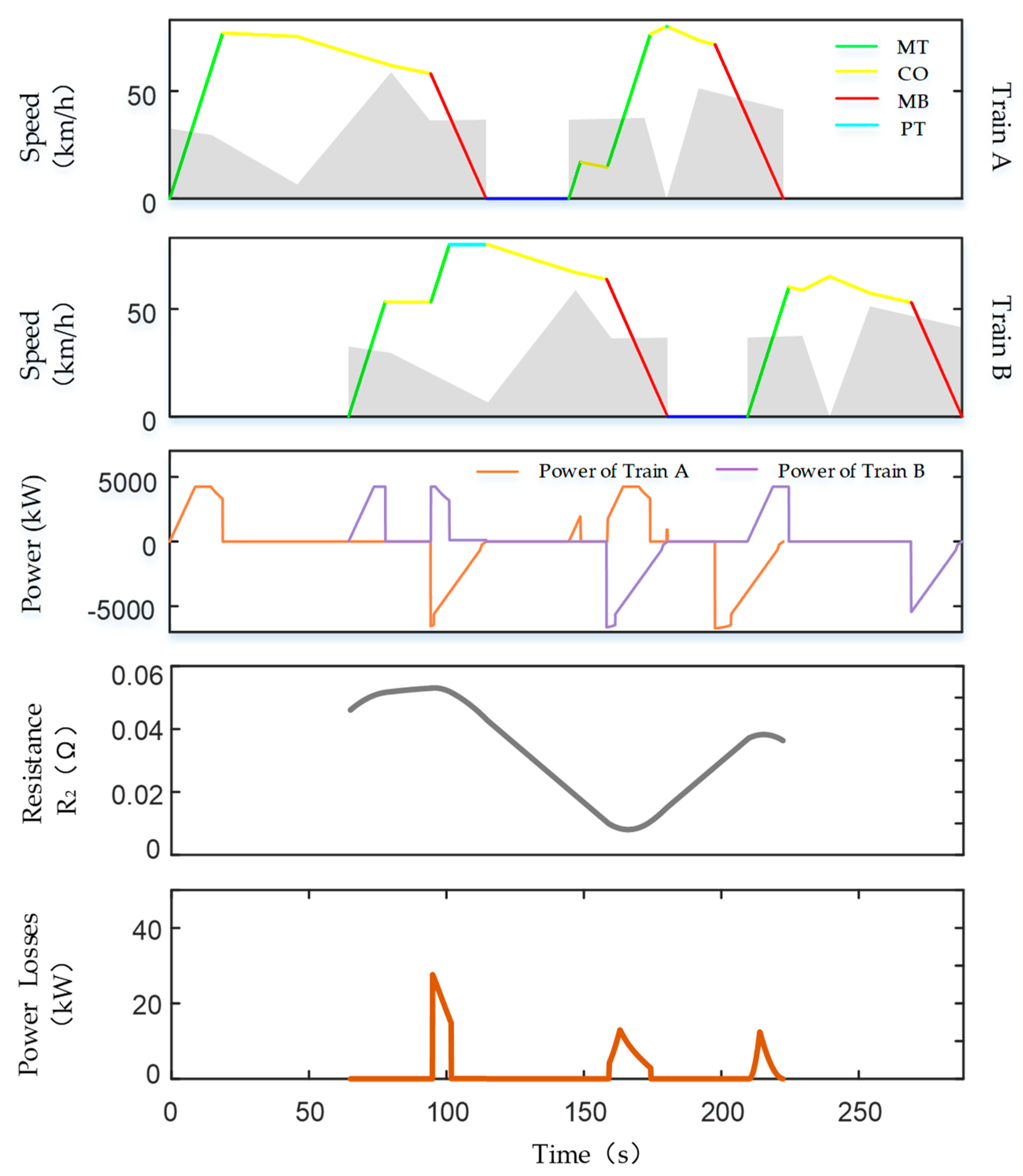
The energy-saving operation curve is worked out by multi-train joint optimization and is shown in
Figure 17, as well as the results of regenerative energy dynamic losses. Subsection Ⅰ has no regenerative energy to absorb and Subsection Ⅳ belongs to Case 5; both need not to be optimized, and the
v* of Subsection Ⅱ–Ⅲ are 47.7 km/h and 13.1 km/h, respectively. The power curve shows that regenerative energy is effectively absorbed. The energy consumption of two operation modes is shown in
Table 6. Although multi-train joint optimization increases the traction energy, it makes better use of regenerative energy and decreases the system energy, and the total energy consumption of
Figure 16 and
Figure 17 is 65.0306 kWh and 61.7688 kWh, respectively. The energy-saving rate brought by multi-train joint optimization is 5.02% in this case.
- (c)
Result for the Practical Route
The effectiveness of the proposed solution method was verified on the flat route. Now, the gradient listed in
Table 4 is taken into consideration, and the single-train optimal operation curve of multi-train system and corresponding results with dynamic losses of recovered regenerative energy are shown in
Figure 18. The speed in the CO phase fluctuates as the gradient changes, and regenerative energy still cannot be effectively absorbed. On the practical route, the transition speed from MT to CO of the two sections are 76.8 km/h and 61.2km/h, respectively. The detailed energy consumption is shown in
Table 7.
The energy-saving operation curve on a practical route is obtained by multi-train joint optimization and shown in
Figure 19. Same as the situation on the flat route, Subsection Ⅰ and Subsection Ⅳ need not be optimized. The
v* of Subsection Ⅱ–Ⅲ are 53.4 km/h and 16.9 km/h, respectively. The power curves of two trains show that the energy-saving control strategy of multi-train system has a good absorption effect for the regenerative energy. Besides, the resistance
R2 and the power losses are also shown. The power losses curve increases to the peak and then decreases in each OP; actually, the peak represents the maximum absorption capacity for regenerative energy, namely when the traction power and the braking power are equal. The electrical line resistance
R2 depends on the train positions and varies with time, as the distance of the two trains varies with time. The detailed energy consumption is shown in
Table 8.
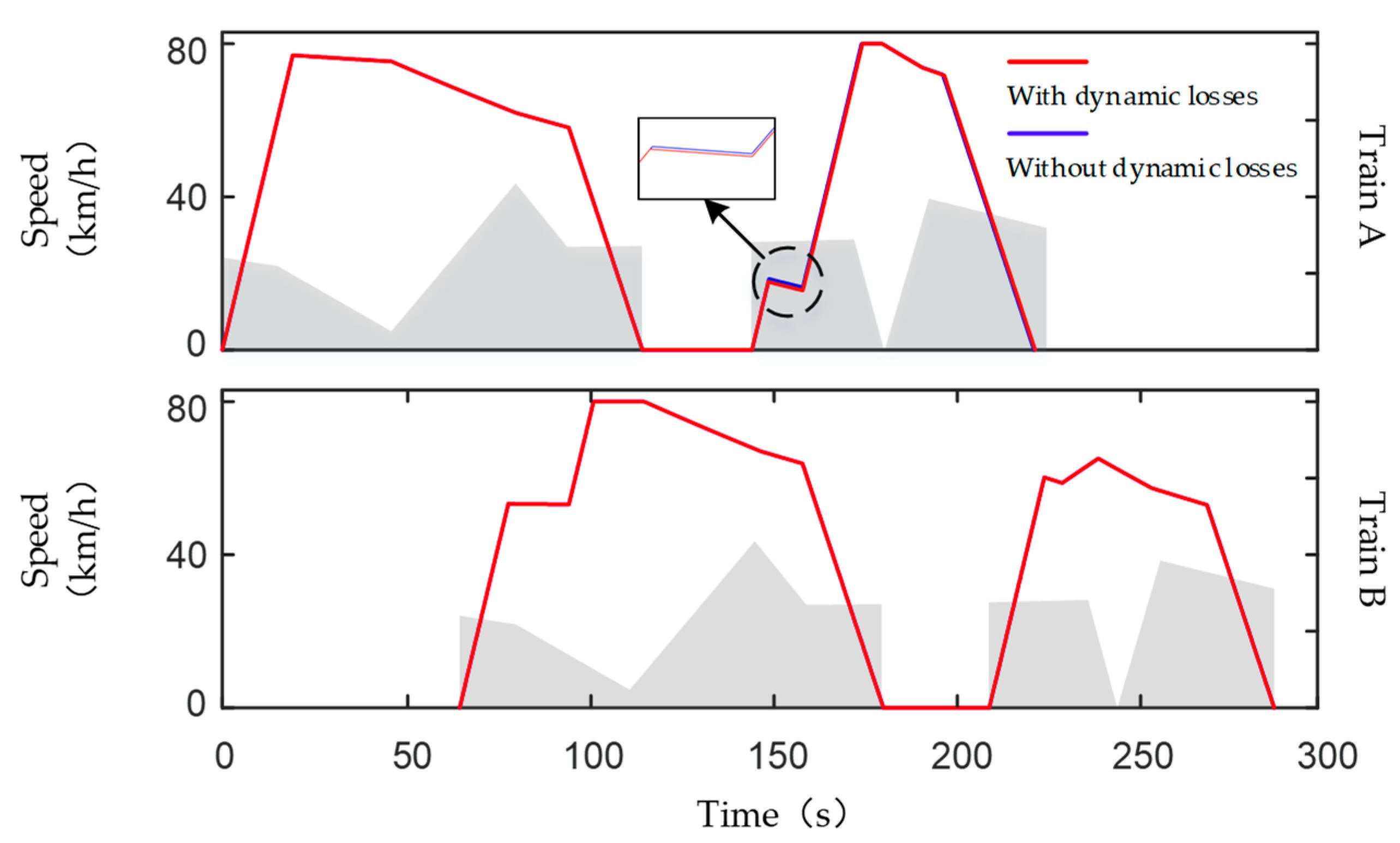
However, the influence of considering the dynamic losses of regenerative energy on the optimal operation curve of multi-train needs to be evaluated, and the difference of optimal speed profile between with and without the regenerative energy transmission losses is shown in
Figure 20, in which it is easy to observe that speed profiles of Subsections Ⅰ, Ⅱ, and Ⅳ remain unchanged. However, the
v* of Subsection Ⅲ changes from 18.0 km/h to 16.9 km/h after considering the regenerative energy transmission losses.
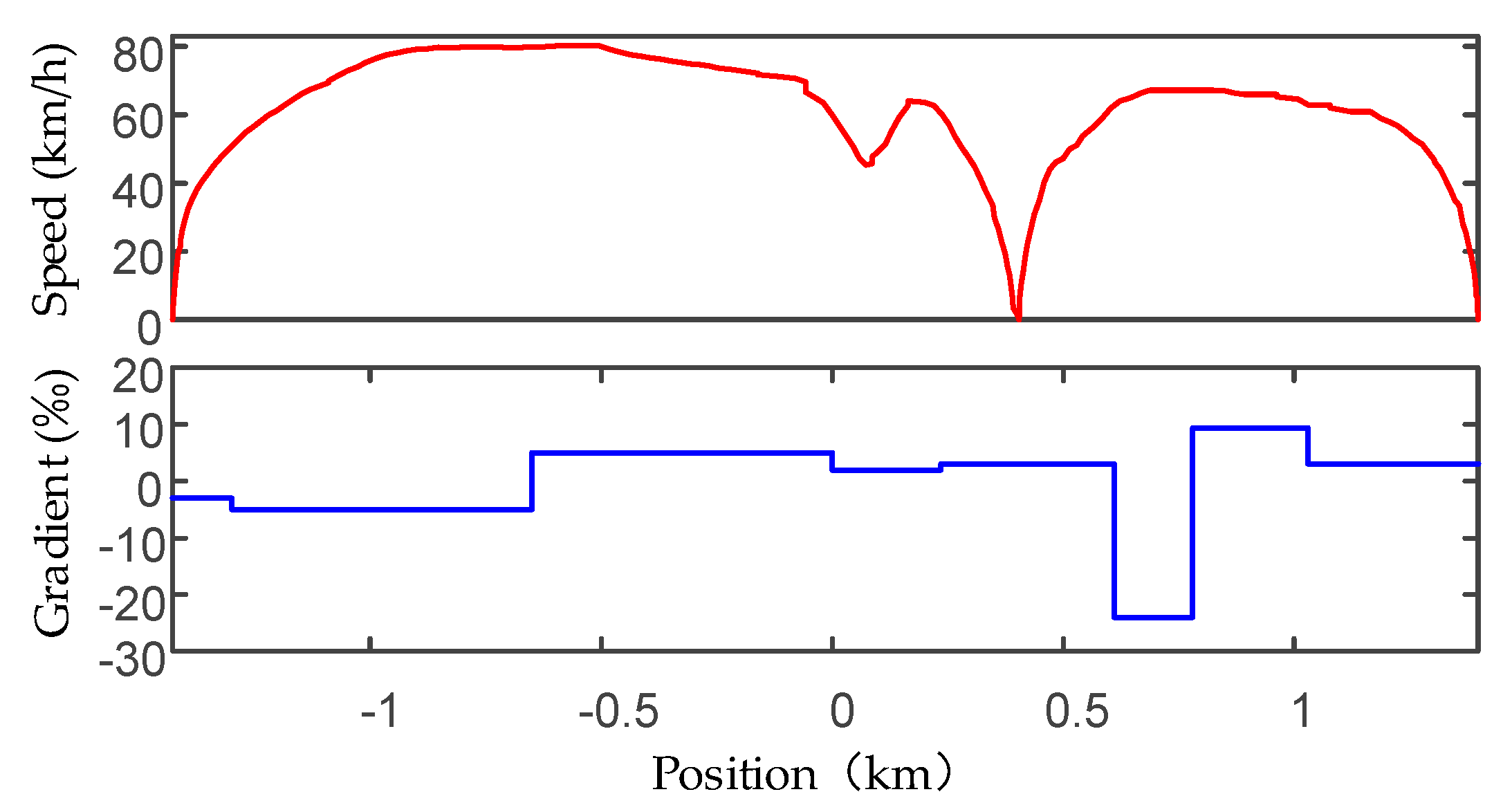
The speed profile of the real running process and gradient is shown in
Figure 21. Energy consumption can be obtained by Equations (19) and (20), which is 41.67 kWh. Assume that the departure interval also takes Δ
T, the corresponding
P-t curve of multi-train system with real operation mode is shown in
Figure 22, as well as the result of dynamic losses of recovered regenerative energy on the catenary.
On this basis, absorbed regenerative energy of the real running process can be worked out by the third item of Equations (9) and (10), which is 10.33 kWh. The lost regenerative energy during the transmission process on the catenary is 0.2275 kWh. Therefore, total energy consumption of the multi-train system with the real operation mode is 73.2375 kWh. The result shows that the energy-saving rates of the optimal operation mode are 2.47% and 17.28% compared with the single-train optimal operation mode and real operation mode, respectively.
- (d)
Energy-Saving Effect Promotion for Steep Slope
It can be observed from
Table 7 and
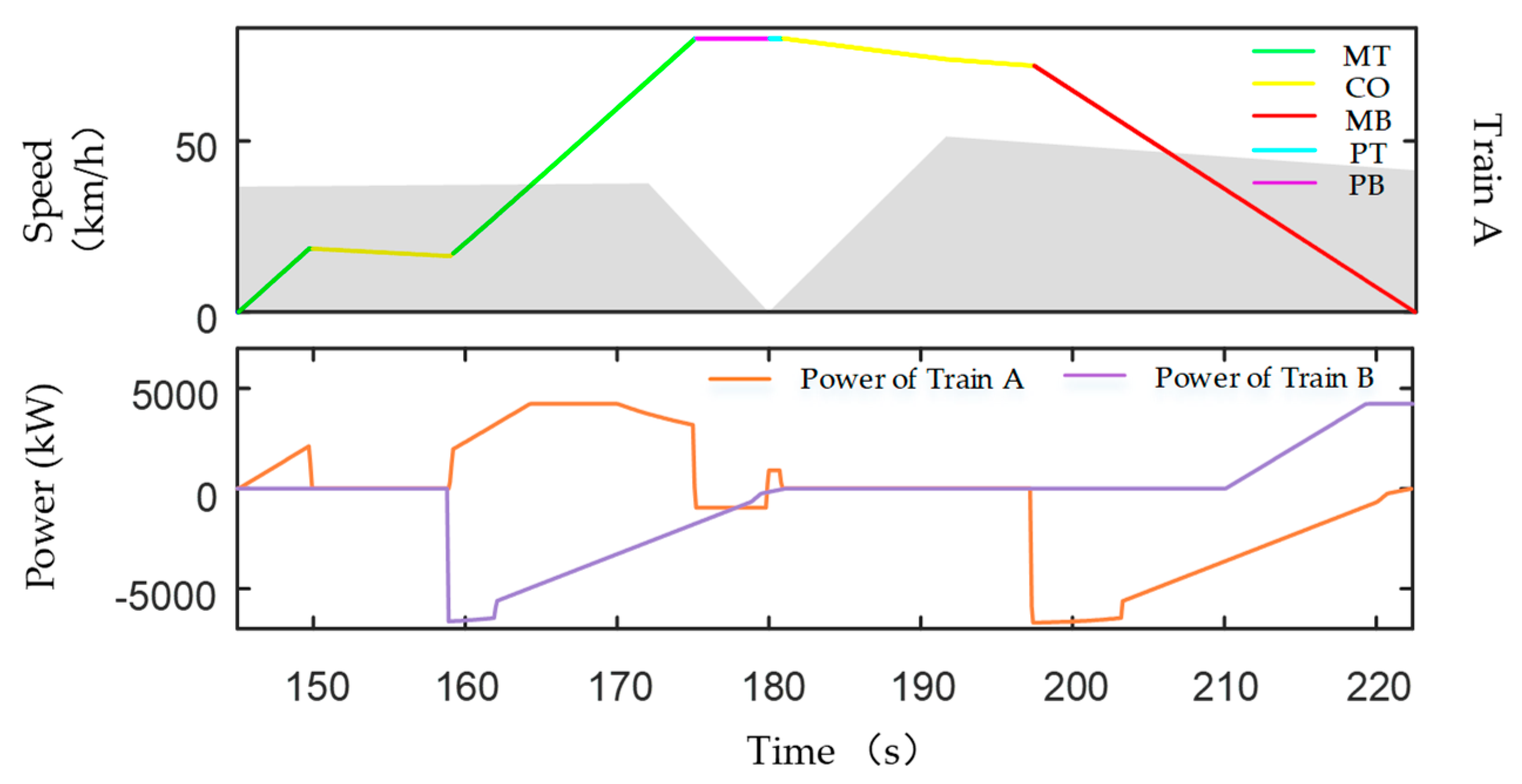
Table 8 that the energy consumption of Subsection Ⅱ and Ⅳ is reduced, but is increased for Subsection Ⅲ. The speed profile and corresponding power curve of Subsection Ⅲ are shown in
Figure 23. Obviously, PB mode appears at
in the OP, the start and end positions of this area are 675 m and 780 m, respectively. It can be known from
Table 4 that the corresponding gradient is −24. Not only the power of Train A in this area is negative and cannot absorb the regenerative energy, but the line potential energy is also wasted.
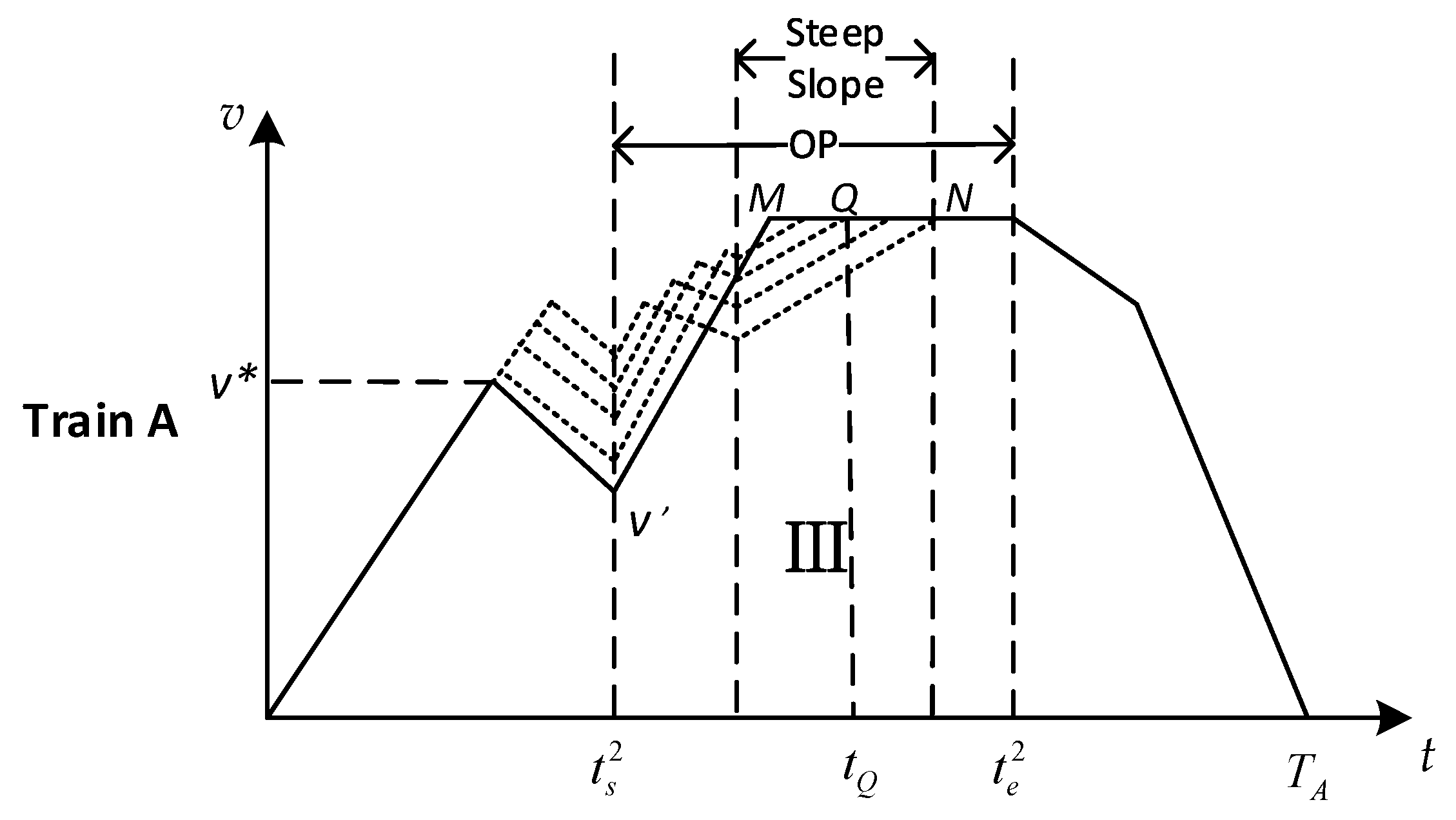
The optimal operation curve is worked out by the optimization method of a steep slope and is shown in
Figure 24, as well as the results with dynamic losses. The
v* and
v’ of Subsection Ⅲ are 17.8 km/h and 16.4 km/h, which were 16.9 km/h and 15.5 km/h before improvement, respectively. In addition, there were three operation modes in the OP (namely MT, PB, and PT), and the transition speeds of three phases were the speed limit. After improvement, the OP is made of MT, CO, and PT, and the PB mode disappears. The transition speed from MT to CO is 76.1 km/h, then the train coasts to the speed limit using the line potential energy. Actually, the corresponding
Q is
N, namely the transition position from CO to PT is the end of steep slope. Therefore, the optimal control strategy of multi-train for a steep slope contains seven motion phases (namely, MT, CO, MT, CO, PT, CO, and MB by sequence).
The detailed energy consumption of each subsection is shown in
Table 9, and the total energy consumption of Subsection Ⅲ decreases by 2.73 kWh, among which the traction energy decreases by 1.73 kWh and the absorbed regenerative energy increases by 1.00 kWh. The former confirmed the concept of the leaving slope speed proposed by Jin and Wang [
38], namely when the train reaches the speed limit at the end of a steep slope, it can make full use of the line potential energy and minimize the traction energy. As for the latter, the power of Train A corresponding speed
v’ increases because
v’ increases, which means the absorbed power increases at the beginning part of the OP. Therefore, both conditions are met simultaneously, optimization for steep slope improves the utilization of regenerative energy while making full use of the line potential energy.
The result verifies the effectiveness of the proposed optimization method for a steep slope, which brings ideal energy-saving effect and the total energy consumption of the multi-train system is 57.7981 kWh. The comparison of total energy consumption between four operation modes is shown in
Table 10. The energy-saving rate after improvement for steep slope can reach up to 4.60%, 6.95%, and 21.08%, respectively, compared with the unimproved operation mode, single-train optimal operation mode, and real operation mode by sequence.
- (e)
Different Departure Intervals
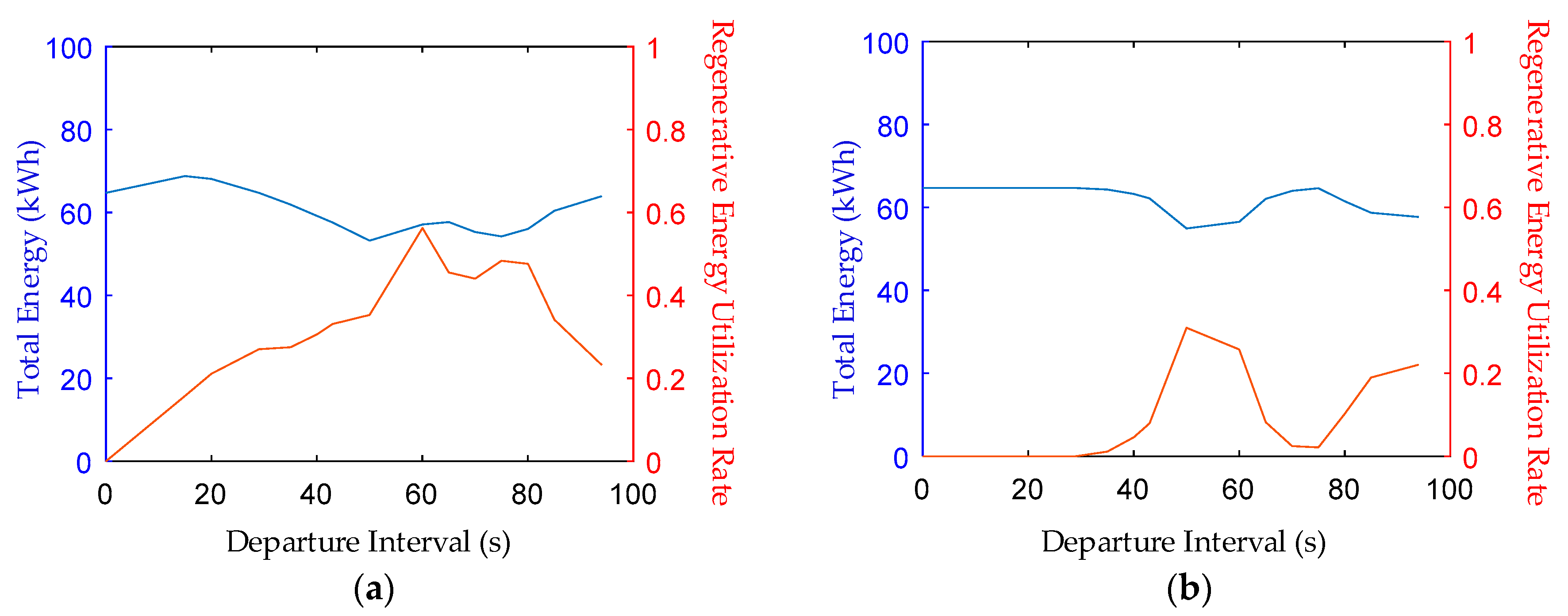
The departure interval of the previous simulation is 65 s; however, the total energy consumption and the regenerative energy utilization rate are different for different departure intervals. The relationship of which with the two operation modes is shown in
Figure 25.
It can be observed that for the single-train optimal operation mode, because the speed profile of each subsection is changeless, the MB phases are changeless, namely the total regenerative energy is a constant, hence, minimum total energy consumption corresponding to maximum regenerative energy utilization rate, and the corresponding departure interval is 50 s, as shown in
Figure 25b. However, the rule is not applicable for the multi-train optimal operation mode, because the speed profile of each subsection changes after joint optimization, which means the MB phases change and the total regenerative energy is not a constant. As shown in
Figure 25a, the departure interval of the minimum total energy consumption is 50 s, but the departure interval of the maximum regenerative energy utilization rate is 60 s.
Besides, in the calculation of regenerative energy utilization rate, some studies that only optimize the tracking train just count the regenerative energy of the former train into total regenerative energy. In this paper, the braking phases of all subsections are taken into consideration even though the regenerative energy generated by the last subsection has no other trains to recover, otherwise the utilization rate will be much higher.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}