A New Virtual Synchronous Generator Design Based on the SMES System for Frequency Stability of Low-Inertia Power Grids




Abstract
:1. Introduction
- Propose a new VSG scheme relying on the SMES system to increase the frequency stability of ultra-low-inertia power grids, taking into account high levels of RES penetration, nonlinearities, and uncertainties.
- Based on the best knowledge of the authors, it is the first attempt to apply VSG using the SMES system to increase the frequency stability of modern power grids. In the literature work, the design of the VSG depended on the battery ESSs, which can only provide sufficient inertia power for a short time and thus leads to system instability in some cases.
- The proposed virtual controller (i.e., PI controller), which is a merging of a virtual primary controller and virtual secondary controller, is optimally constructed using the particle swarm optimization (PSO) algorithm.
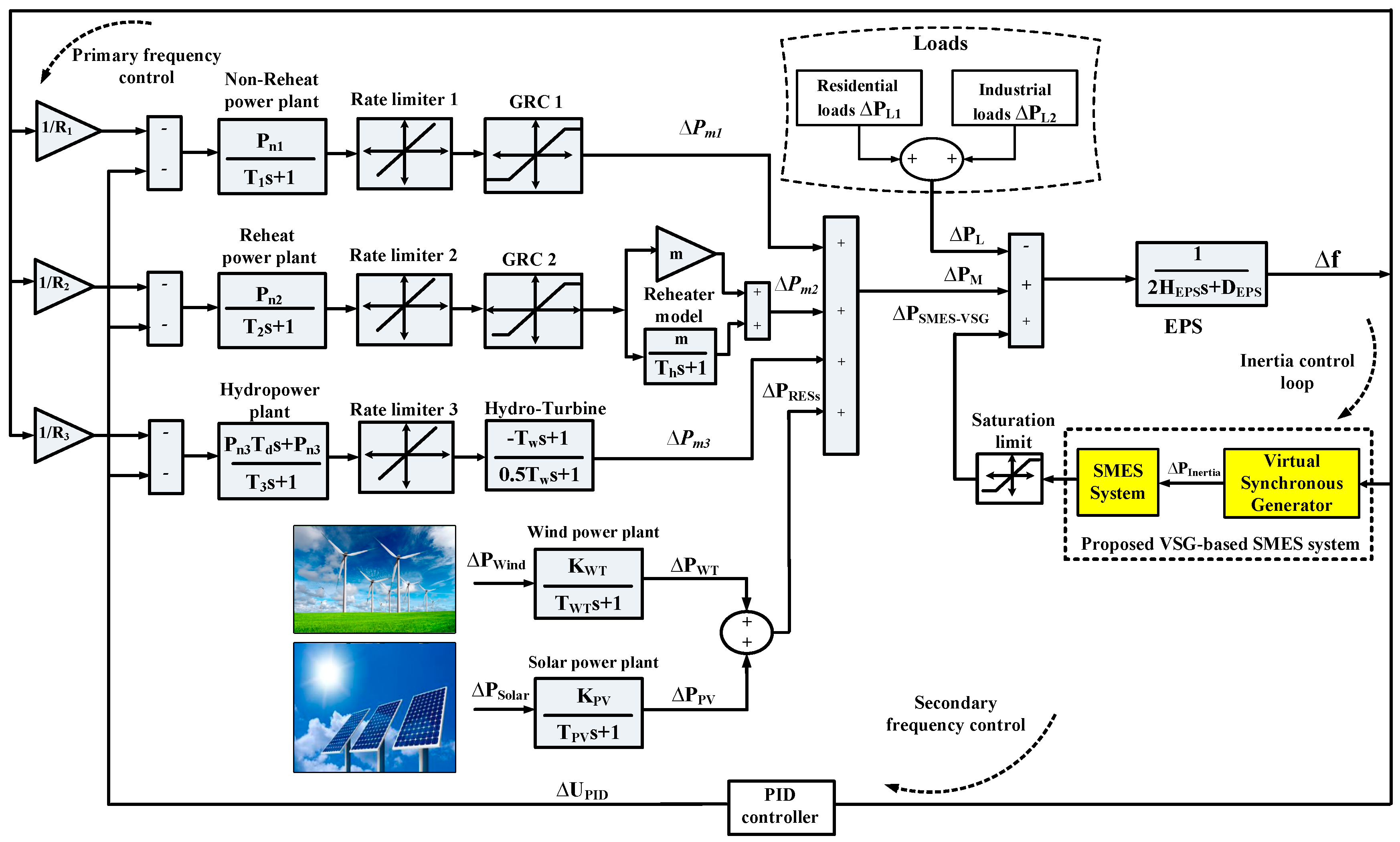
- To achieve a realistic study on the frequency stability issue for modern power grids, this study is taking into account the effects of several conventional power generation units (e.g., non-reheat, reheat, hydropower plants), in addition to multiple RESs in the analysis of the LFC problem. In other words, the proposed system constitutes a real hybrid power system that keeps pace with the renewable power systems of today.
- The uncertainties of RESs/loads, system nonlinearities (e.g., generation rate constraint (GRC), and governor deadband (GDB)) are taken into account in the proposed virtual controller design procedure. Thus, the proposed control strategy (i.e., VSG-based SMES) will guarantee avoidance of system instability.
2. Modeling and Configuration of the Studied System
3. Design of Virtual Synchronous Generator Based on the SMES System
3.1. Mathematical Model of the SMES Unit
3.2. Modeling of VSG-Based SMES System
3.3. Design of Virtual Controller for VSG-Based SMES System
| Algorithm 1. Particle swarm optimization (PSO) algorithm. | |
| 1 | Set dimension d = 2 (i.e., Ri and Ki) |
| 2 | fori = 1: s |
| 3 | forj = 1: d |
| 4 | Setxi,d = Rand(dmin,dmax) |
| 5 | Setvi,d = Rand(vmin,vmax) |
| 6 | end for |
| 7 | SetPbest = xi |
| 8 | iff(Pbest) < f(gbest) then |
| 9 | Setgbest = Pbest |
| 10 | end if |
| 11 | end for |
| 12 | fort = 1: n |
| 13 | fori = 1: s |
| 14 | iff(xi) < f(Pbest) then |
| 15 | SetPbest = xi |
| 16 | end if |
| 17 | iff(Pbest) < f(gbest) then |
| 18 | Setgbest = Pbest |
| 19 | end if |
| 20 | end for |
| 21 | Update the particle’s velocity using (20) |
| 22 | Update the particle’s position using (21) |
| 23 | iff(gbest) < 0.001 |
| 24 | break |
| 25 | else |
| 26 | continue |
| 27 | end if |
| 28 | end for |
4. Simulation Results and Discussion
4.1. Scenario 1: System Performance Evaluation under Low RESs Penetration and Heavy Load Change
4.2. Scenario 2: System Performance Evaluation under High RES Penetration and Heavy Load Change
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yan, R.; Masood, N.-A.; Saha, T.K.; Bai, F.; Gu, H. The anatomy of the 2016 south australia blackout: A catastrophic event in a high renewable network. IEEE Trans. Power Syst. 2018, 33, 5374–5388. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Control; Springer: New York, NY, USA, 2014. [Google Scholar]
- Hasanien, H.M. Whale optimisation algorithm for automatic generation control of interconnected modern power systems including renewable energy sources. IET Gener. Transm. Distrib. 2018, 12, 607–614. [Google Scholar] [CrossRef]
- Khooban, M.H.; Gheisarnejad, M. A novel deep reinforcement learning controller based type-ii fuzzy system: Frequency regulation in microgrids. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 1–11. [Google Scholar] [CrossRef]
- Xu, D.-Z.; Liu, J.; Yan, X.-G.; Yan, W. A novel adaptive neural network constrained control for a multi-area interconnected power system with hybrid energy storage. IEEE Trans. Ind. Electron. 2017, 65, 6625–6634. [Google Scholar] [CrossRef]
- Eshetu, W.; Sharma, P.; Sharma, C. ANFIS based load frequency control in an isolated micro grid. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 19–22 February 2018; pp. 1165–1170. [Google Scholar]
- Ma, M.; Liu, X.; Zhang, C. LFC for multi-area interconnected power system concerning wind turbines based on DMPC. IET Gener. Transm. Distrib. 2017, 11, 2689–2696. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust frequency control in an islanded microgrid: H∞ and μ-synthesis approaches. IEEE Trans. Smart Grid 2015, 7, 1. [Google Scholar] [CrossRef] [Green Version]
- Saxena, P.; Singh, N.; Pandey, A.K. Enhancing the dynamic performance of microgrid using derivative controlled solar and energy storage based virtual inertia system. J. Energy Storage 2020, 31, 101613. [Google Scholar] [CrossRef]
- Magdy, G.; Shabib, G.; Elbaset, A.A.; Mitani, Y. Renewable power systems dynamic security using a new coordination of frequency control strategy based on virtual synchronous generator and digital frequency protection. Int. J. Electr. Power Energy Syst. 2019, 109, 351–368. [Google Scholar] [CrossRef]
- Teimourzadeh, S.; Aminifar, F.; Davarpanah, M. Microgrid dynamic security: Challenges, solutions and key considerations. Electr. J. 2017, 30, 43–51. [Google Scholar] [CrossRef]
- Fathi, A.; Shafiee, Q.; Bevrani, H. Robust frequency control of microgrids using an extended virtual synchronous generator. IEEE Trans. Power Syst. 2018, 33, 6289–6297. [Google Scholar] [CrossRef]
- Magdy, G.; Shabib, G.; Elbaset, A.A.; Mitani, Y. A novel coordination scheme of virtual inertia control and digital protection for microgrid dynamic security considering high renewable energy penetration. IET Renew. Power Gener. 2019, 13, 462–474. [Google Scholar] [CrossRef]
- Sockeel, N.; Gafford, J.; Papari, B.; Mazzola, M. Virtual Inertia Emulator-Based Model Predictive Control for Grid Frequency Regulation Considering High Penetration of Inverter-based Energy Storage System. IEEE Trans. Sustain. Energy 2020, 11, 2932–2939. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Mitani, Y.; Watanabe, M.; Kufeoglu, S. Robust virtual inertia control of an islanded microgrid considering high penetration of renewable energy. IEEE Access 2017, 6, 625–636. [Google Scholar] [CrossRef]
- Ali, H.; Magdy, G.; Li, B.; Shabib, G.; Elbaset, A.A.; Xu, D.; Mitani, Y. A new frequency control strategy in an islanded microgrid using virtual inertia control-based coefficient diagram method. IEEE Access 2019, 7, 16979–16990. [Google Scholar] [CrossRef]
- Kerdphol, T.; Watanabe, M.; Hongesombut, K.; Mitani, Y. Self-adaptive virtual inertia control-based fuzzy logic to improve frequency stability of microgrid with high renewable penetration. IEEE Access 2019, 7, 76071–76083. [Google Scholar] [CrossRef]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Int. J. Electr. Power Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.W.; Fosso, O.B. A Virtual Synchronous Machine implementation for distributed control of power converters in SmartGrids. Electr. Power Syst. Res. 2015, 122, 180–197. [Google Scholar] [CrossRef]
- Muttaqi, K.M.; Islam, R.; Sutanto, D. Future power distribution grids: Integration of renewable energy, energy storage, electric vehicles, superconductor, and magnetic bus. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Khosraviani, M.; Jahanshahi, M.; Farahani, M.; Bidaki, A.R.Z. Load–Frequency Control Using Multi-objective Genetic Algorithm and Hybrid Sliding Mode Control-Based SMES. Int. J. Fuzzy Syst. 2017, 20, 280–294. [Google Scholar] [CrossRef]
- Pappachen, A.; Fathima, A.P. Load frequency control in deregulated power system integrated with SMES–TCPS combination using ANFIS controller. Int. J. Electr. Power Energy Syst. 2016, 82, 519–534. [Google Scholar] [CrossRef]
- Ngamroo, I.; Karaipoom, T. Improving low-voltage ride-through performance and alleviating power fluctuation of DFIG wind turbine in DC microgrid by optimal SMES with fault current limiting function. IEEE Trans. Appl. Supercond. 2014, 24, 1–5. [Google Scholar] [CrossRef]
- Said, S.M.; Aly, M.; Hartmann, B.; Alharbi, A.G.; Ahmed, E.M. SMES-based fuzzy logic approach for enhancing the reliability of microgrids equipped with PV generators. IEEE Access 2019, 7, 92059–92069. [Google Scholar] [CrossRef]
- Padhan, S.; Sahu, R.K.; Panda, S. Automatic generation control with thyristor controlled series compensator including superconducting magnetic energy storage units. Ain Shams Eng. J. 2014, 5, 759–774. [Google Scholar] [CrossRef] [Green Version]
- Egyptian Electricity Holding Company, Annual Report 2019. Available online: http://www.moee.gov.eg/english_new/report.aspx (accessed on 1 September 2020).
- Magdy, G.; Bakeer, A.; Shabib, G.; Elbaset, A.A.; Mitani, Y. Decentralized model predictive control strategy of a realistic multi power system automatic generation control. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference (MEPCON), Menoufia, Egypt, 19–21 December 2017; pp. 190–196. [Google Scholar]
- Lee, D.-J.; Wang, L. Small-signal stability analysis of an autonomous hybrid renewable energy power generation/energy storage system part I: Time-domain simulations. IEEE Trans. Energy Convers. 2008, 23, 311–320. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill Press: New York, NY, USA, 1994. [Google Scholar]
- Amrouche, S.O.; Rekioua, D.; Bacha, S. Overview of energy storage in renewable energy systems. Int. J. Hydrog. Energy 2016, 41, 20914–20927. [Google Scholar] [CrossRef]
- Kerdphol, T.; Qudaih, Y.; Mitani, Y. Optimum battery energy storage system using PSO considering dynamic demand response for microgrids. Int. J. Electr. Power Energy Syst. 2016, 83, 58–66. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. Proc. IEEE Int. Conf. Neural Netw. 1995, 4, 1942–1948. [Google Scholar]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control. Syst. Technol. 2005, 13, 559–576. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Description | Value |
|---|---|---|
| H | Equivalent inertia constant (pu) | 5.710 |
| D | System damping coefficient of the area (pu) | 0.028 |
| T1 | Valve time constant of the non-reheat plant (s) | 0.400 |
| T2 | Steam valve time constant of reheat plant (s) | 0.400 |
| T3 | Water valve time constant hydro plant (s) | 90.000 |
| Td | Dashpot time constant of hydro plant speed governor (s) | 5.000 |
| Th | The time constant of reheat thermal plant (s) | 6.000 |
| Tw | Water starting time in hydro intake (s) | 1.000 |
| m | The fraction of turbine power (intermediate pressure section) | 0.500 |
| R1 | Governor speed regulation non-reheat plant (pu) | 2.500 |
| R2 | Governor speed regulation reheat plant (pu) | 2.500 |
| R3 | Governor speed regulation hydro plant (pu) | 1.000 |
| Pn1 | Nominal rated Power output for the non-reheat plant (pu) | 0.253 |
| Pn2 | Nominal rated Power output for reheat plant (pu) | 0.611 |
| Pn3 | Nominal rated Power output for the hydro plant (pu) | 0.136 |
| f | Base of the system frequency (Hz) | 50.000 |
| TPV | Time constant of the PV system (s) | 1.850 |
| KPV | Gain constant of the PV system | 1.000 |
| TWT | Time constant of wind turbines (s) | 1.500 |
| KWT | Gain constant of wind turbines | 1.000 |
| KP | Proporational gain of the PID cotroller | 71.253 |
| KI | Integral gain of the PID cotroller | 5.905 |
| KD | Derivative gain of the PID cotroller | 6.107 |
| Term | Description | Value |
|---|---|---|
| Id0 | Inductor rated current (kA) | 20.000 |
| Tc | Converter time constant (s) | 0.030 |
| Kf | Feedback gain of ) | 0.001 |
| KSMES-1 | Control gain of the SMES loop | 1.000 |
| L | Coil inductance (H) | 3.000 |
| Term | Description | Value |
|---|---|---|
| s | Size of the swarm (i.e., no of birds) | 50.000 |
| n | Number of iterations | 50.000 |
| w | Inertia weight factor | 0.950 |
| c1 | Acceleration constant 1 | 0.120 |
| c2 | Acceleration constant 2 | 2.000 |
| Term | Description | Value |
|---|---|---|
| Hi | Virtual inertia (pu s) | 0.900 |
| Di | Virtual damping (pu MW/Hz) | 10.400 |
| Virtual droop characteristic (Hz/pu MW) | 5.000 | |
| Virtual secondary integrator gain | 0.002 |
| Scenario 1 (Low RESs) | VSG-Based Battery | Proposed VSG-Based SMES | ||||
|---|---|---|---|---|---|---|
| MUS (pu) | MOS (pu) | TS (s) | MUS (pu) | MOS (pu) | TS (s) | |
| High system inertia (100%) | 0.039 | 0.033 | 150.00 | 0.008 | 0.004 | 3.100 |
| Medium system inertia (60%) | 0.050 | 0.048 | 152.00 | 0.012 | 0.005 | 3.000 |
| Low system inertia (20%) | 0.081 | 0.075 | 156.00 | 0.031 | 0.005 | 2.500 |
| Scenario 2 (High RESs) | VSG-Based Battery | Proposed VSG-Based SMES | ||||
|---|---|---|---|---|---|---|
| MUS (pu) | MOS (pu) | TS (s) | MUS (pu) | MOS (pu) | TS (s) | |
| High system inertia (100%) | 0.036 | 0.043 | 47.000 | 0.007 | 0.015 | 2.600 |
| Medium system inertia (60%) | 0.050 | 0.061 | 51.000 | 0.010 | 0.026 | 5.800 |
| Low system inertia (20%) | 0.083 | 0.105 | 62.000 | 0.031 | 0.073 | 6.100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magdy, G.; Bakeer, A.; Nour, M.; Petlenkov, E. A New Virtual Synchronous Generator Design Based on the SMES System for Frequency Stability of Low-Inertia Power Grids. Energies 2020, 13, 5641. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215641
Magdy G, Bakeer A, Nour M, Petlenkov E. A New Virtual Synchronous Generator Design Based on the SMES System for Frequency Stability of Low-Inertia Power Grids. Energies. 2020; 13(21):5641. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215641
Chicago/Turabian StyleMagdy, Gaber, Abualkasim Bakeer, Morsy Nour, and Eduard Petlenkov. 2020. "A New Virtual Synchronous Generator Design Based on the SMES System for Frequency Stability of Low-Inertia Power Grids" Energies 13, no. 21: 5641. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215641