A Novel Application of Improved Marine Predators Algorithm and Particle Swarm Optimization for Solving the ORPD Problem

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Problem Formulation
2.1. Objectives
2.2. Network Limitations
2.2.1. The Equality Limitations
2.2.2. The Inequality Constraints
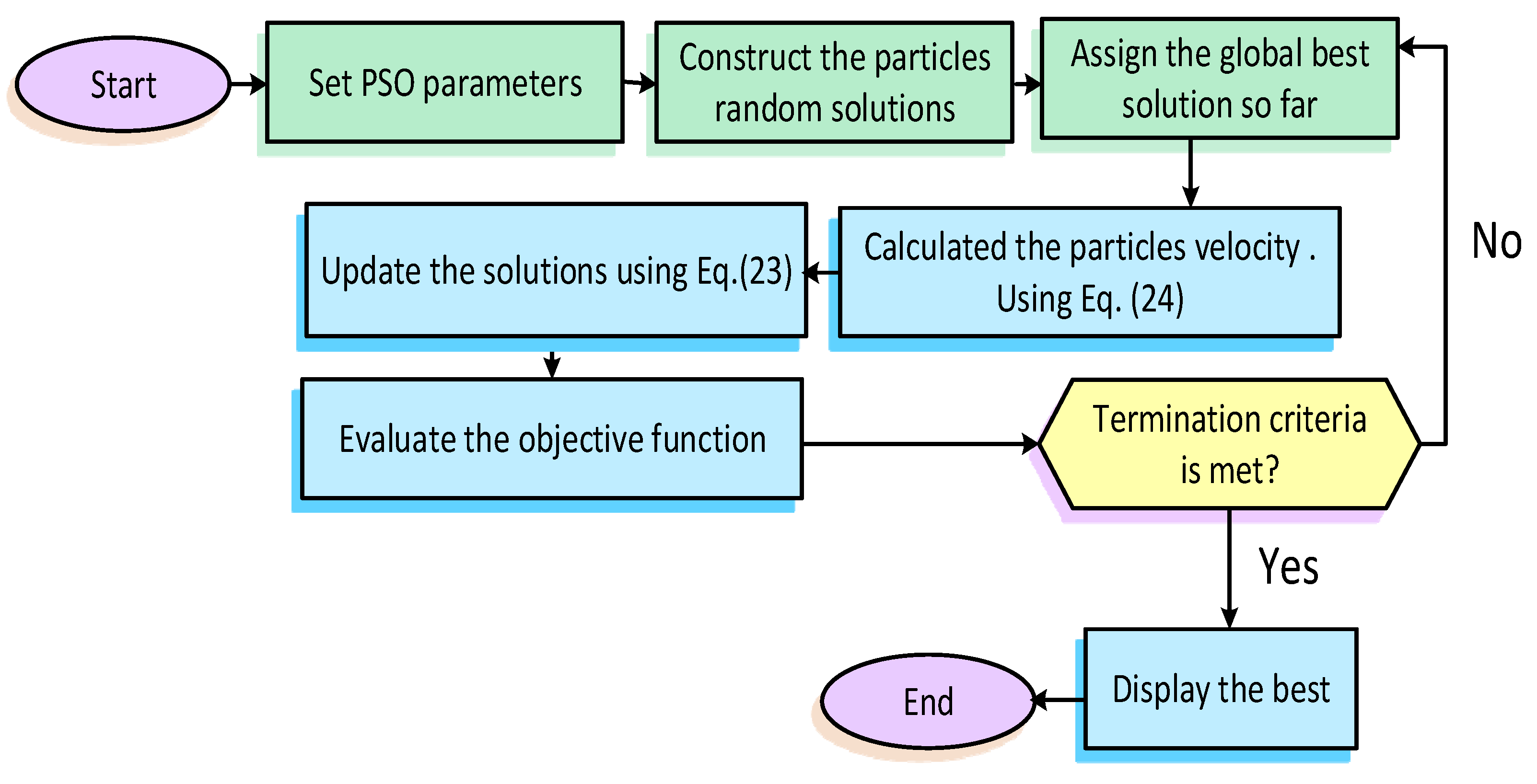
3. The Proposed IMPAPSO Approach
3.1. MPA Formulation
3.1.1. MPA Phases
3.1.2. FADs’ Effect
3.1.3. Marine Predator Memory
3.2. Particle Swarm Optimizer (PSO)
3.3. The Proposed IMPAPSO Structure
| Algorithm 1: Pseudo code of the proposed IMPAPSO |
| 1. Determine the MPAPSO parameters; agents, maximum number of iteration and optimization problem bounds; . |
| 2. Compute the initial random solutions using Equation (15). |
| 3. Set t = 1. |
| 4. While (t > = ) |
| 5. Evaluate the fitness function (). |
| 6. Determine the Elite matrix (best solution obtained so far). |
| 7. Use Equation (25) to calculate the Weibull distribution |
| 8. If (t <) |
| 9. Update the agents’ positions using Equation (18). |
| 10. If .) |
| 11. For (. |
| 12. Update the agents’ positions using Equation (19) |
| 13. End for |
| 14. For . |
| 15. Update the agents’ positions using Equation (20). |
| 16. End for |
| 17. Elseif (t > .) |
| 18. If |
| 19. Update the agents’ positions using Equation (21). |
| 20. Else |
| 21. Update the agents’ positions using Equations (23) and (24). |
| 22. End if |
| 23. End if |
| 24. Using FADs effect and Equation (22) to update current agent. |
| 25. T = t + 1 |
| 26. End while |
| 27. Display the best solution |
4. Simulation Results
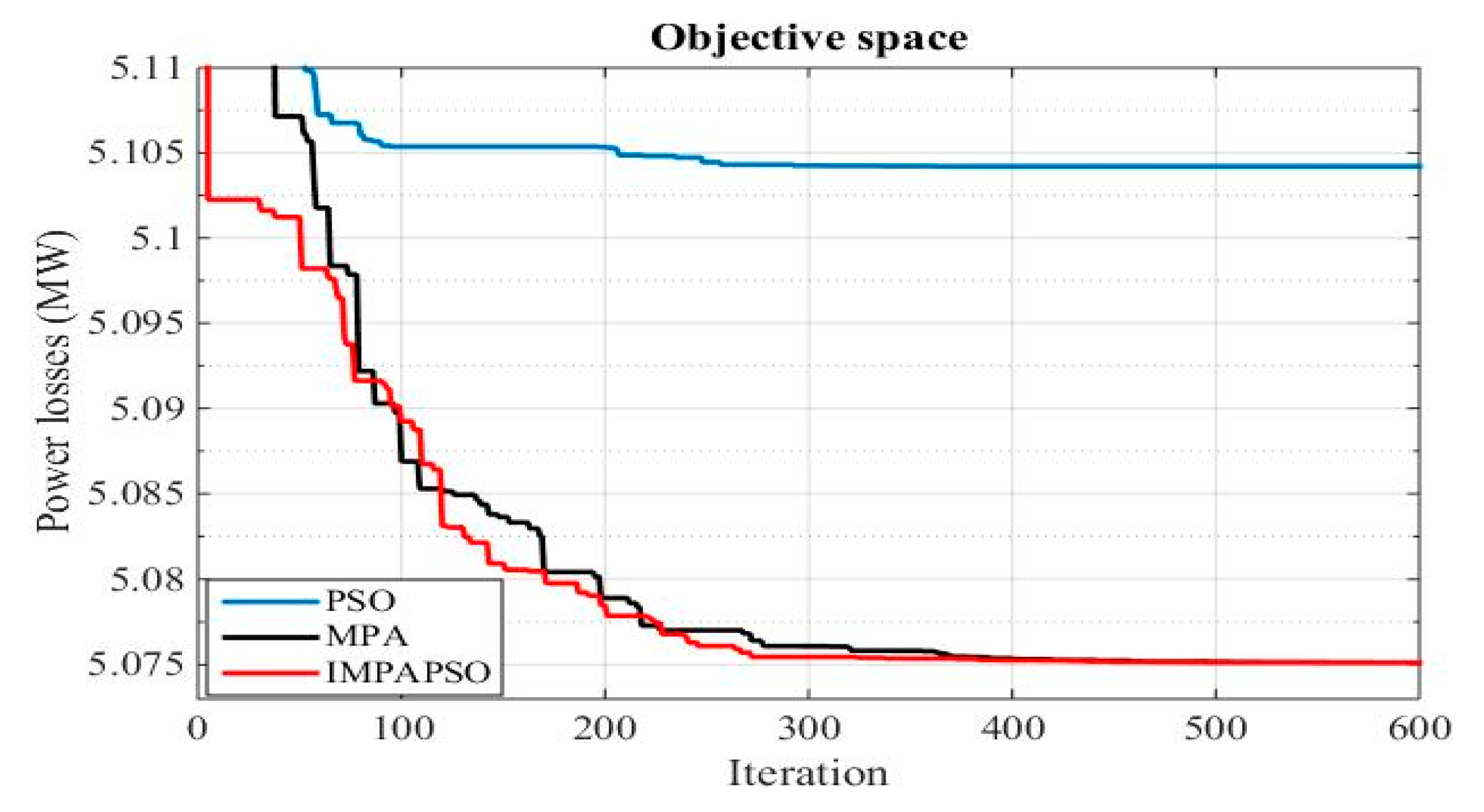
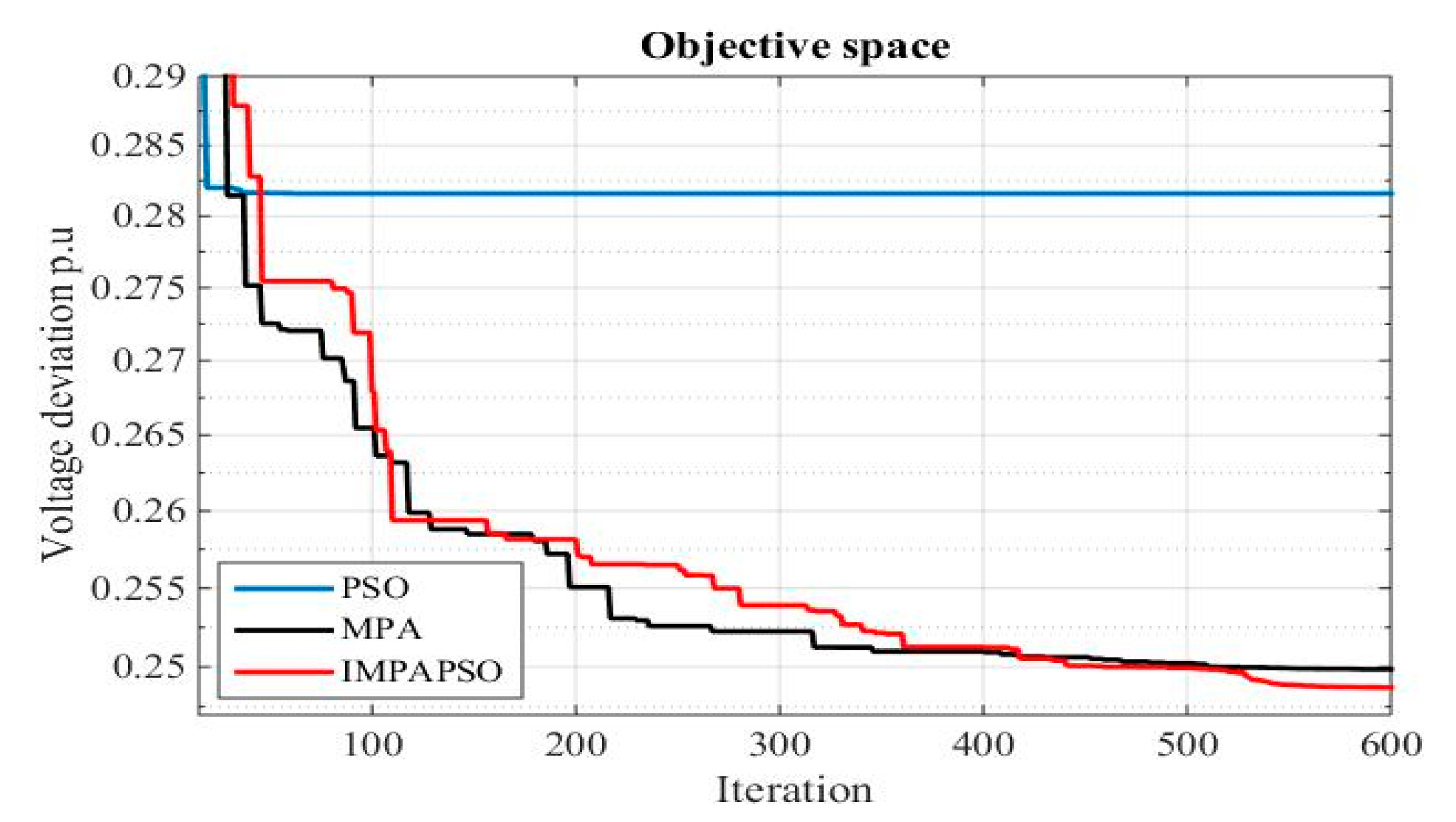
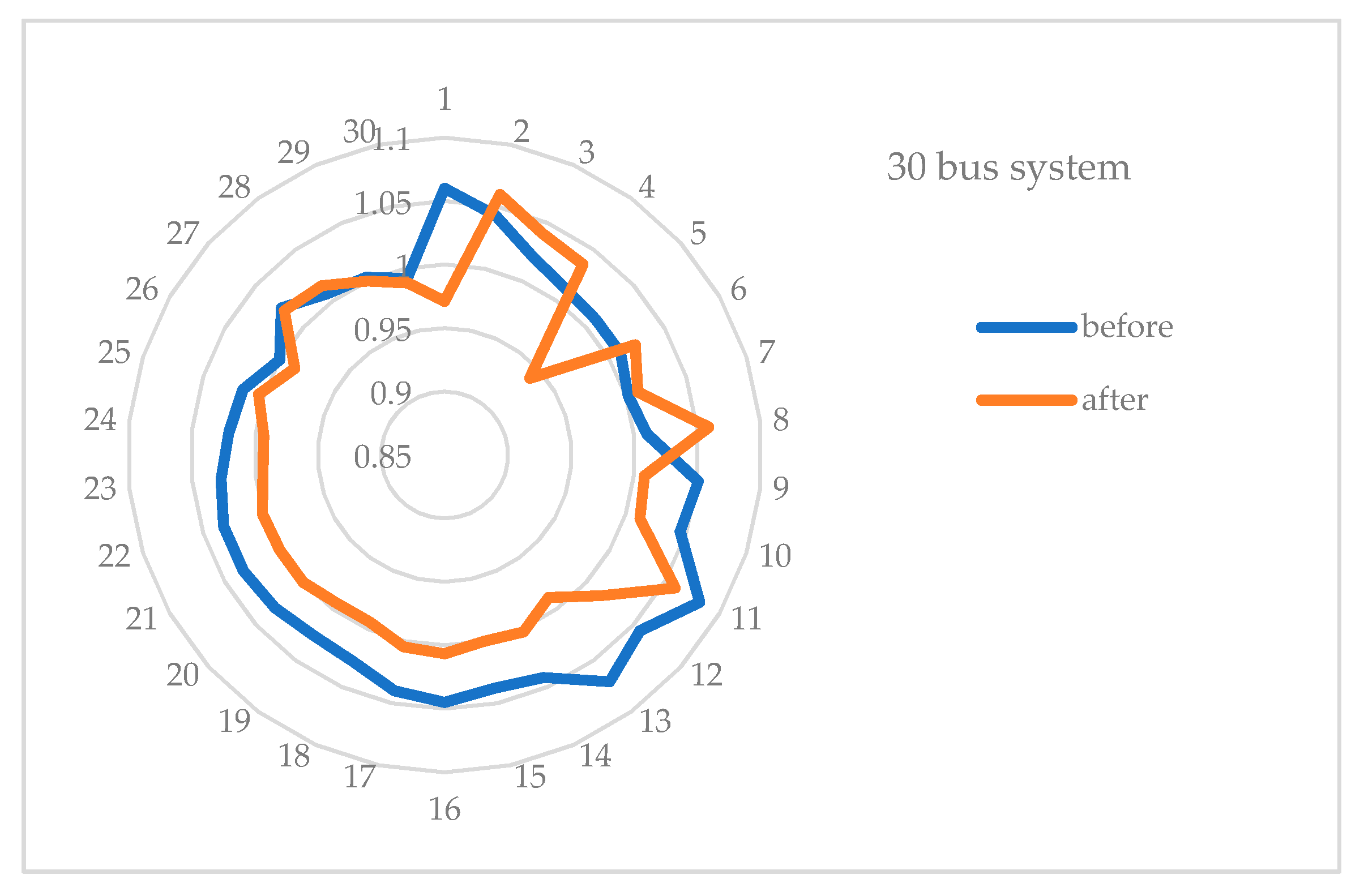
4.1. Results of the IEEE 30-Bus System
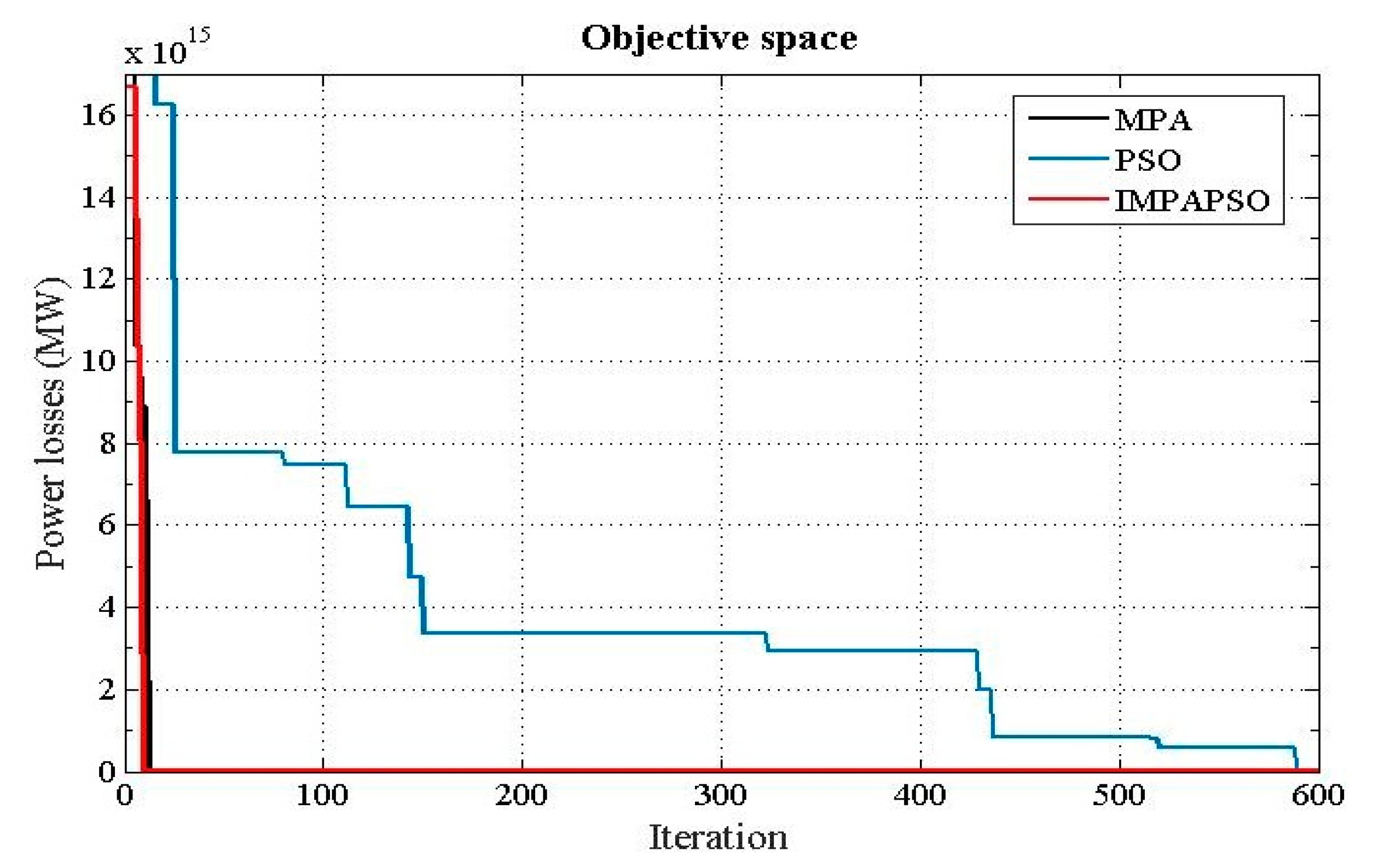
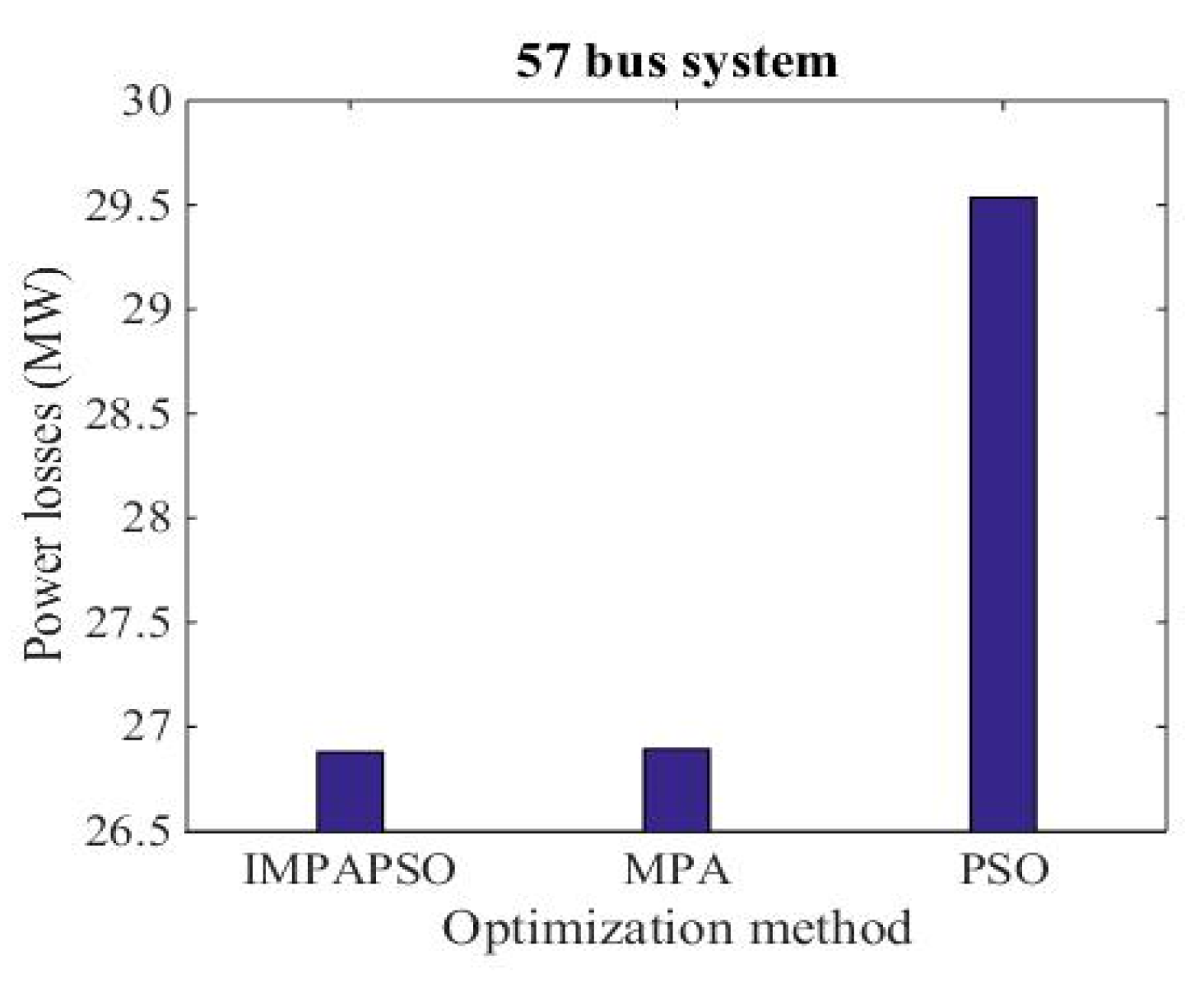
4.2. Results of the IEEE 57-Bus System
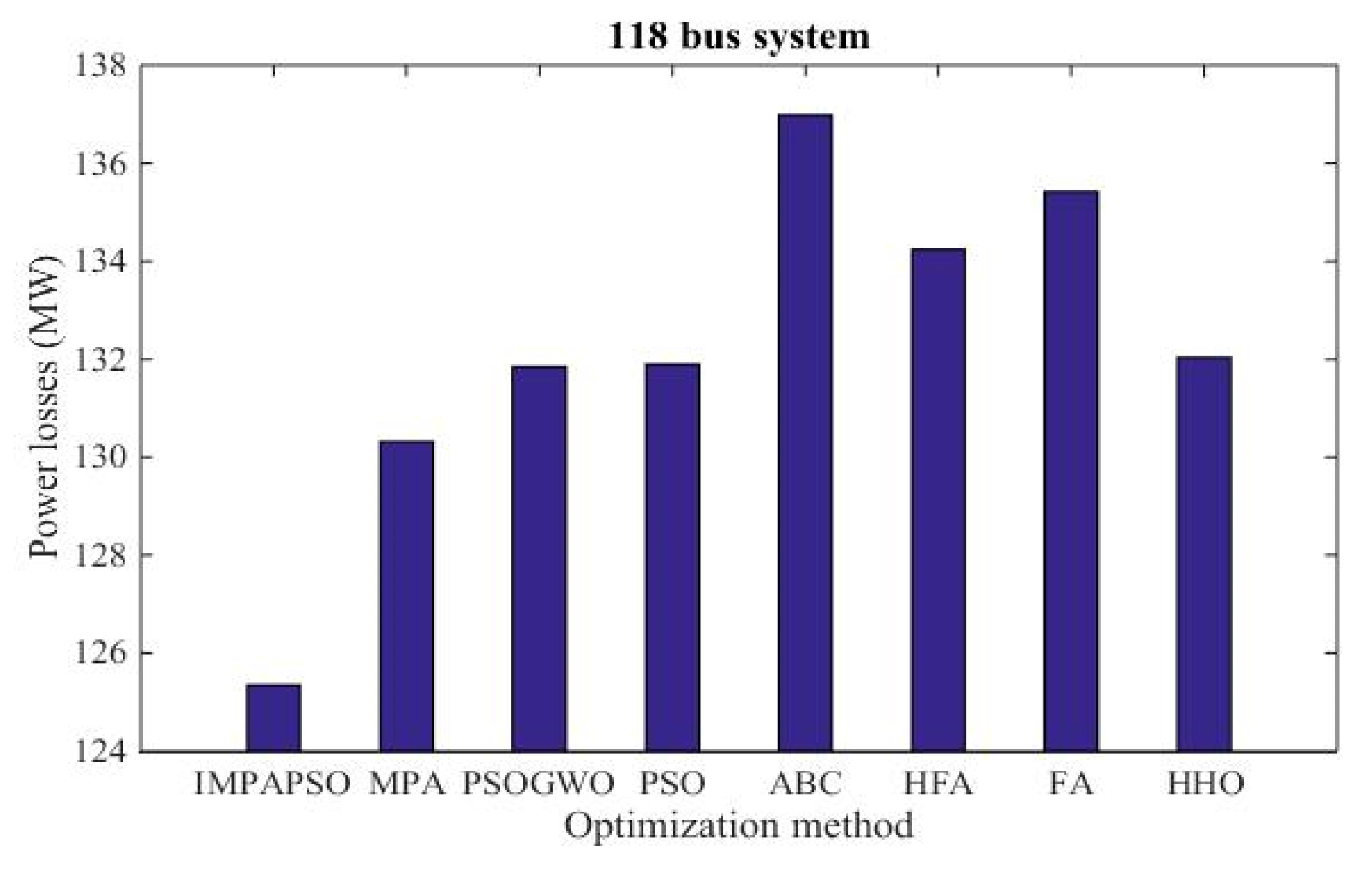
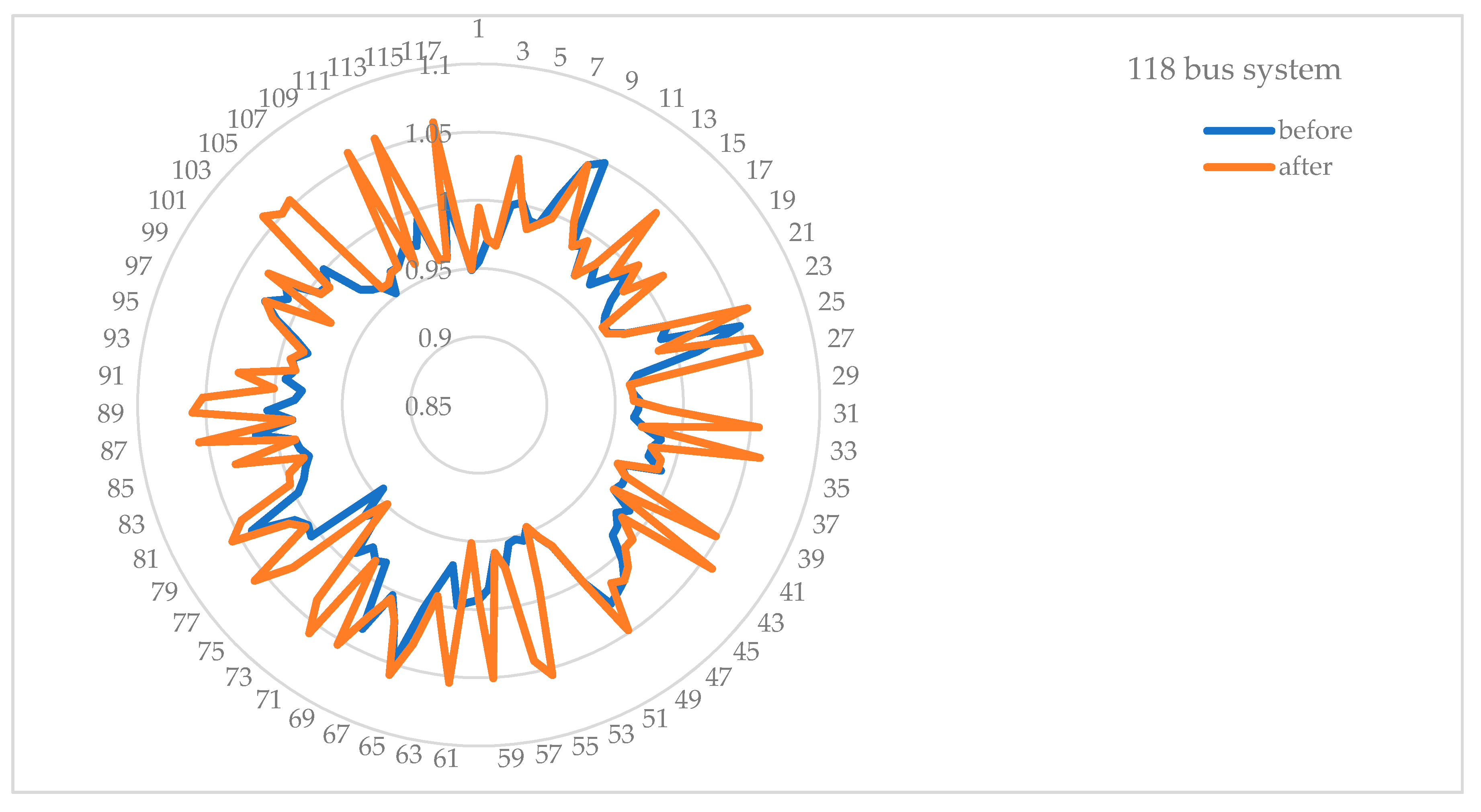
4.3. Results of the IEEE 118-Bus System
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vlachogiannis, J.G.; Lee, K.Y. Quantum-Inspired Evolutionary Algorithm for Real and Reactive Power Dispatch. IEEE Trans. Power Syst. 2008, 23, 1627–1636. [Google Scholar] [CrossRef] [Green Version]
- Dommel, H.W.; Tinney, W.F. Optimal Power Flow Solutions. IEEE Trans. Power Appar. Syst. 1968, 10, 1866–1876. [Google Scholar] [CrossRef]
- Robbins, B.A.; Dominguez-Garcia, A.D. Optimal Reactive Power Dispatch for Voltage Regulation in Unbalanced Distribution Systems. IEEE Trans. Power Syst. 2016, 31, 2903–2913. [Google Scholar] [CrossRef]
- Shaheen, A.M.; Farrag, S.M.; El-Sehiemy, R.A. MOPF solution methodology. IET Gener. Transm. Distrib. 2017, 11, 570–581. [Google Scholar] [CrossRef]
- Sakr, W.S.; El-Sehiemy, R.A.; Azmy, A.M. Adaptive differential evolution algorithm for efficient reactive power management. Appl. Soft Comput. 2017, 53, 336–351. [Google Scholar] [CrossRef]
- Singh, H.; Srivastava, L. Modified Differential Evolution algorithm for multi-objective VAR management. Int. J. Electr. Power Energy Syst. 2014, 55, 731–740. [Google Scholar] [CrossRef]
- Mehdinejad, M.; Mohammadi-Ivatloo, B.; Dadashzadeh-Bonab, R.; Zare, K. Solution of optimal reactive power dispatch of power systems using hybrid particle swarm optimization and imperialist competitive algorithms. Int. J. Electr. Power Energy Syst. 2016, 83, 104–116. [Google Scholar] [CrossRef]
- Saddique, M.S.; Bhatti, A.R.; Haroon, S.S.; Sattar, M.K.; Amin, S.; Sajjad, I.A.; Haq, S.S.U.; Awan, A.B.; Rasheed, N. Solution to optimal reactive power dispatch in transmission system using meta-heuristic techniques―Status and technological review. Electr. Power Syst. Res. 2020, 178, 106031. [Google Scholar] [CrossRef]
- Polprasert, J.; Ongsakul, W.; Vo, D.N. Optimal Reactive Power Dispatch Using Improved Pseudo-gradient Search Particle Swarm Optimization. Electr. Power Compon. Syst. 2016, 44, 518–532. [Google Scholar] [CrossRef]
- Lee, K.; Yang, F. Optimal reactive power planning using evolutionary algorithms: A comparative study for evolutionary programming, evolutionary strategy, genetic algorithm, and linear programming. IEEE Trans. Power Syst. 1998, 13, 101–108. [Google Scholar] [CrossRef]
- Zhu, J.; Xiong, X. Optimal reactive power control using modified interior point method. Electr. Power Syst. Res. 2003, 66, 187–192. [Google Scholar] [CrossRef]
- Quintana, V.H.; Santos-Nieto, M. Reactive-power dispatch by successive quadratic programming. IEEE Trans. Energy Convers. 1989, 4, 425–435. [Google Scholar] [CrossRef]
- Jan, R.-M.; Chen, N. Application of the fast Newton-Raphson economic dispatch and reactive power/voltage dispatch by sensitivity factors to optimal power flow. IEEE Trans. Energy Convers. 1995, 10, 293–301. [Google Scholar] [CrossRef]
- Wu, Q.; Cao, Y.; Wen, J. Optimal reactive power dispatch using an adaptive genetic algorithm. Int. J. Electr. Power Energy Syst. 1998, 20, 563–569. [Google Scholar] [CrossRef]
- El-Ela, A.A.A.; Kinawy, A.M.; El Sehiemy, R.A.; Mouwafi, M.T. Optimal reactive power dispatch using ant colony optimization algorithm. Electr. Eng. 2011, 93, 103–116. [Google Scholar] [CrossRef]
- Shaheen, M.A.M.; Hasanien, H.M.; Mekhamer, S.F.; Talaat, H.E.A. Optimal Power Flow of Power Systems Including Distributed Generation Units Using Sunflower Optimization Algorithm. IEEE Access 2019, 7, 109289–109300. [Google Scholar] [CrossRef]
- Qais, M.H.; Alghuwainem, S.; Alghuwainem, S. Identification of electrical parameters for three-diode photovoltaic model using analytical and sunflower optimization algorithm. Appl. Energy 2019, 250, 109–117. [Google Scholar] [CrossRef]
- Shaheen, M.A.M.; Mekhamer, S.F.; Hasanien, H.M.; Talaat, H.E.A. Optimal Power Flow of Power Systems Using Hybrid Firefly and Particle Swarm Optimization Technique. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 232–237. [Google Scholar]
- Duman, S.; Sonmez, Y.; Guvenc, U.; Yorukeren, N. Optimal reactive power dispatch using a gravitational search algorithm. IET Gener. Transm. Distrib. 2012, 6, 563. [Google Scholar] [CrossRef]
- Lenin, K.; Reddy, B.R.; Kalavathi, M.S. Brainstorm optimization algorithm for solving optimal reactive power dispatch problem. Int. J. Res. Electron. Commun. Technol. 2014, 1, 25–30. [Google Scholar]
- El-Fergany, A.A.; Hasanien, H.M. Tree-seed algorithm for solving optimal power flow problem in large-scale power systems incorporating validations and comparisons. Appl. Soft Comput. 2017, 64, 307–316. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; Hasanien, H.M. Salp swarm optimizer to solve optimal power flow comprising voltage stability analysis. Neural Comput. Appl. 2019, 32, 5267–5283. [Google Scholar] [CrossRef]
- Hasanien, H.M.; El-Fergany, A.A. Salp swarm algorithm-based optimal load frequency control of hybrid renewable power systems with communication delay and excitation cross-coupling effect. Electr. Power Syst. Res. 2019, 176, 0378–7796. [Google Scholar] [CrossRef]
- Qais, M.H.; Alghuwainem, S.; Alghuwainem, S. Enhanced salp swarm algorithm: Application to variable speed wind generators. Eng. Appl. Artif. Intell. 2019, 80, 82–96. [Google Scholar] [CrossRef]
- Attia, A.-F.; El-Sehiemy, R.A.; Hasanien, H.M. Optimal power flow solution in power systems using a novel Sine-Cosine algorithm. Int. J. Electr. Power Energy Syst. 2018, 99, 331–343. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S.; Nouh, A.S. Coyote optimization algorithm for parameters extraction of three-diode photovoltaic models of photovoltaic modules. Energy 2019, 187, 15. [Google Scholar] [CrossRef]
- Dai, C.; Chen, W.; Zhu, Y.; Zhang, X. Seeker Optimization Algorithm for Optimal Reactive Power Dispatch. IEEE Trans. Power Syst. 2009, 24, 1218–1231. [Google Scholar] [CrossRef]
- Amjady, N.; Fatemi, H.; Zareipour, H. Solution of Optimal Power Flow Subject to Security Constraints by a New Improved Bacterial Foraging Method. IEEE Trans. Power Syst. 2012, 27, 1311–1323. [Google Scholar] [CrossRef]
- Yousri, D.; Mirjalili, S. Fractional-order cuckoo search algorithm for parameter identification of the fractional-order chaotic, chaotic with noise and hyper-chaotic financial systems. Eng. Appl. Artif. Intell. 2020, 92, 103662. [Google Scholar] [CrossRef]
- Mujtaba, M.; Masjuki, H.; Kalam, M.; Ong, H.C.; Gul, M.; Farooq, M.; Soudagar, M.E.M.; Ahmed, W.; Harith, M.; Yusoff, M. Ultrasound-assisted process optimization and tribological characteristics of biodiesel from palm-sesame oil via response surface methodology and extreme learning machine—Cuckoo search. Renew. Energy 2020, 158, 202–214. [Google Scholar] [CrossRef]
- Kalaam, R.N.; Muyeen, S.; Al-Durra, A.; Hasanien, H.M.; Al-Wahedi, K. Optimisation of controller parameters for grid-tied photovoltaic system at faulty network using artificial neural network-based cuckoo search algorithm. IET Renew. Power Gener. 2017, 11, 1517–1526. [Google Scholar] [CrossRef]
- ElAzab, O.S.; Alghuwainem, S.; Alsaidan, I.; Abdelaziz, A.Y.; Khalid, H.M. Parameter Estimation of Three Diode Photovoltaic Model Using Grasshopper Optimization Algorithm. Energies 2020, 13, 497. [Google Scholar] [CrossRef] [Green Version]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. Parameters extraction of three-diode photovoltaic model using computation and Harris Hawks optimization. Energy 2020, 195, 117040. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Li, B. A hybrid artificial bee colony assisted differential evolution algorithm for optimal reactive power flow. Int. J. Electr. Power Energy Syst. 2013, 52, 25–33. [Google Scholar] [CrossRef]
- Shaheen, M.A.; Hasanien, H.M.; Alkuhayli, A. A novel hybrid GWO-PSO optimization technique for optimal reactive power dispatch problem solution. Ain Shams Eng. J. 2020. [Google Scholar] [CrossRef]
- Gafar, M.G.; El Sehiemy, R.A.; Hasanien, H.M. A Novel Hybrid Fuzzy-JAYA Optimization Algorithm for Efficient ORPD Solution. IEEE Access 2019, 7, 182078–182088. [Google Scholar] [CrossRef]
- Liang, R.-H.; Wang, J.-C.; Chen, Y.-T.; Tseng, W.-T. An enhanced firefly algorithm to multi-objective optimal active/reactive power dispatch with uncertainties consideration. Int. J. Electr. Power Energy Syst. 2015, 64, 1088–1097. [Google Scholar] [CrossRef]
- Devaraj, D.; Roselyn, J.P. Genetic algorithm based reactive power dispatch for voltage stability improvement. Int. J. Electr. Power Energy Syst. 2010, 32, 1151–1156. [Google Scholar] [CrossRef]
- Hasanien, H.M. Particle Swarm Design Optimization of Transverse Flux Linear Motor for Weight Reduction and Improvement of Thrust Force. IEEE Trans. Ind. Electron. 2011, 58, 4048–4056. [Google Scholar] [CrossRef]
- Badar, A.Q.; Umre, B.; Junghare, A. Reactive power control using dynamic Particle Swarm Optimization for real power loss minimization. Int. J. Electr. Power Energy Syst. 2012, 41, 133–136. [Google Scholar] [CrossRef]
- Zhihuan, L.; Yinhong, L.; Xianzhong, D. Non-dominated sorting genetic algorithm-II for robust multi-objective optimal reactive power dispatch. IET Gener. Transm. Distrib. 2010, 4, 1000. [Google Scholar] [CrossRef]
- Biswas, P. Genetic Algorithm Based Multiobjective Bilevel Programming for Optimal Real and Reactive Power Dispatch Under Uncertainty. In Computational Intelligence Applications in Modeling and Control; Springer: Berlin/Heidelberg, Germany, 2015; pp. 171–203. [Google Scholar]
- Varadarajan, M.; Swarup, K. Differential evolutionary algorithm for optimal reactive power dispatch. Int. J. Electr. Power Energy Syst. 2008, 30, 435–441. [Google Scholar] [CrossRef]
- Orosz, T.; Rassõlkin, A.; Kallaste, A.; Arsénio, P.; Pánek, D.; Kaska, J.; Karban, P. Robust Design Optimization and Emerging Technologies for Electrical Machines: Challenges and Open Problems. Appl. Sci. 2020, 10, 6653. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Ghanbarian, M.M.; Habibi, A. A new hybrid algorithm for optimal reactive power dispatch problem with discrete and continuous control variables. Appl. Soft Comput. 2014, 22, 126–140. [Google Scholar] [CrossRef]
- Das, D.B.; Patvardhan, C. Reactive power dispatch with a hybrid stochastic search technique. Int. J. Electr. Power Energy Syst. 2002, 24, 731–736. [Google Scholar] [CrossRef]
- Das, D.B.; Patvardhan, C. A new hybrid evolutionary strategy for reactive power dispatch. Electr. Power Syst. Res. 2003, 65, 83–90. [Google Scholar] [CrossRef]
- Yan, W.; Lu, S.; Yu, D. A Novel Optimal Reactive Power Dispatch Method Based on an Improved Hybrid Evolutionary Programming Technique. IEEE Trans. Power Syst. 2004, 19, 913–918. [Google Scholar] [CrossRef]
- Chung, C.; Liang, C.; Wong, K.; Duan, X. Hybrid algorithm of differential evolution and evolutionary programming for optimal reactive power flow. IET Gener. Transm. Distrib. 2010, 4, 84. [Google Scholar] [CrossRef]
- Abdel-Fatah, S.; Ebeed, M.; Kamel, S. Optimal reactive power dispatch using modified sine cosine algorithm. In Proceedings of the 2019 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 2–4 February 2019; pp. 510–514. [Google Scholar]
- Yan, W.; Liu, F.; Chung, C.; Wong, K. A Hybrid Genetic Algorithm–Interior Point Method for Optimal Reactive Power Flow. IEEE Trans. Power Syst. 2006, 21, 1163–1169. [Google Scholar] [CrossRef] [Green Version]
- Ghasemi, M.; Ghanbarian, M.M.; Ghavidel, S.; Rahmani, S.; Moghaddam, E.M. Modified teaching learning algorithm and double differential evolution algorithm for optimal reactive power dispatch problem: A comparative study. Inf. Sci. 2014, 278, 231–249. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Vo Ngoc, D. Improved social spider optimization algorithm for optimal reactive power dispatch problem with different objectives. Neural Comput. Appl. 2019, 32, 5919–5950. [Google Scholar] [CrossRef]
- Srivastava, L.; Singh, H. Hybrid multi-swarm particle swarm optimisation based multi-objective reactive power dispatch. IET Gener. Transm. Distrib. 2015, 9, 727–739. [Google Scholar] [CrossRef]
- Rajan, A.; Malakar, T. Optimal reactive power dispatch using hybrid Nelder–Mead simplex based firefly algorithm. Int. J. Electr. Power Energy Syst. 2015, 66, 9–24. [Google Scholar] [CrossRef]
- Prasad, D.; Banerjee, A.; Singh, R.P. Optimal reactive power dispatch using modified differential evolution algorithm. In Advances in Computer, Communication and Control; Springer: Singapore, 2019; pp. 275–283. [Google Scholar]
- Jeyadevi, S.; Baskar, S.; Babulal, C.; Iruthayarajan, M.W. Solving multiobjective optimal reactive power dispatch using modified NSGA-II. Int. J. Electr. Power Energy Syst. 2011, 33, 219–228. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Beshr, E.; Eteiba, M.B.; Allam, D. A Robust Strategy Based on Marine Predators Algorithm for Large Scale Photovoltaic Array Reconfiguration to Mitigate the Partial Shading Effect on the Performance of PV System. IEEE Access 2020, 8, 112407–112426. [Google Scholar] [CrossRef]
- Yousri, D.; Elaziz, M.A.; Oliva, D.; Abualigah, L.; Al-Qaness, M.A.A.; Ewees, A.A. Reliable applied objective for identifying simple and detailed photovoltaic models using modern metaheuristics: Comparative study. Energy Convers. Manag. 2020, 223, 113279. [Google Scholar] [CrossRef]
- Soliman, M.A.; Hasanien, H.M.; Alkuhayli, A. Marine Predators Algorithm for Parameters Identification of Triple-Diode Photovoltaic Models. IEEE Access 2020, 8, 155832–155842. [Google Scholar] [CrossRef]
- Al-Qaness, M.A.A.; Ewees, A.A.; Fan, H.; Abualigah, L.; Elaziz, M.A. Marine Predators Algorithm for Forecasting Confirmed Cases of COVID-19 in Italy, USA, Iran and Korea. Int. J. Environ. Res. Public Health 2020, 17, 3520. [Google Scholar] [CrossRef]
- Russell, E.; Kennedy, J. “A new optimizer using particle swarm theory” MHS’95. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995. [Google Scholar]
- El Sehiemy, R.A.; El Ela, A.A.A.; Shaheen, A. A Multi-Objective Fuzzy-Based Procedure for Reactive Power-Based Preventive Emergency Strategy. Int. J. Eng. Res. Afr. 2014, 13, 91–102. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhaya, P.K. Solution of optimal reactive power flow using biogeography-based optimization. Int. J. Electr. Electron. Eng. 2010, 4, 568–576. [Google Scholar]
- Omid, K. Generalized weighted Weibull distribution. J. Math. Ext. 2016, 10, 89–118. [Google Scholar]
- Qasem, S.N.; Shamsuddin, S.M.; Hassanien, A.E. Hybrid learning enhancement of RBF network with particle swarm optimization. In Foundations of Computational, Intelligence Volume 1; Springer: Berlin/Heidelberg, Germany, 2009; pp. 381–397. [Google Scholar]
- Matpower. Available online: https://matpower.org/ (accessed on 20 March 2018).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimization Technique | IMPAPSO | MPA | PSOGWO [35] | PSO [35] | GA [35] | HHO [35] | SFO [35] | FA [36] | ABC [36] | BFOA [36] |
|---|---|---|---|---|---|---|---|---|---|---|
| Ploss (MW) | 5.07510941 | 5.07512046 | 5.090370 | 5.1440 | 5.0980 | 5.1440 | 5.1070 | 5.60 | 5.790 | 10.010 |
| Control Variables | Voltage at Bus 1 | 0.969730674 |
| 2 | 1.059513441 | |
| 5 | 0.973780336 | |
| 8 | 1.038276148 | |
| 11 | 0.989374409 | |
| 13 | 1.04492558 | |
| Shunt Capacitor at Bus 10 | 0.000849981 | |
| 12 | 0.022132174 | |
| 15 | 4.360122795 | |
| 17 | 4.605427221 | |
| 20 | 3.555960479 | |
| 21 | 8.766802937 | |
| 23 | 1.669302394 | |
| 24 | 2.780276654 | |
| 29 | 2.071843038 | |
| Transformer Setting at Branch 11 | 0.975423173 | |
| 12 | 1.038573785 | |
| 15 | 0.967390297 | |
| 36 | 0.942683073 |
| Optimization Technique | IMPAPSO | MPA | PSOGWO [35] | PSO [35] | GA [35] | SFO [36] | GSA [36] |
|---|---|---|---|---|---|---|---|
| VD (p.u) | 0.248707298375 | 0.249849531 | 0.2780 | 0.28160 | 0.45530 | 0.39830 | 0.46720 |
| Control Variables | Voltage at Bus 1 | 0.971114325 |
| 2 | 1.059773514 | |
| 5 | 0.940273757 | |
| 8 | 1.059266477 | |
| 11 | 1.059803329 | |
| 13 | 0.989082988 | |
| Shunt Capacitor at Bus 10 | 0.008843572 | |
| 12 | 0.032670671 | |
| 15 | 0.073551739 | |
| 17 | 0.001407284 | |
| 20 | 3.972302965 | |
| 21 | 0.03376219 | |
| 23 | 0.337955988 | |
| 24 | 0.005442228 | |
| 29 | 0.016140404 | |
| Transformer Setting at Branch 11 | 1.099993675 | |
| 12 | 0.977432649 | |
| 15 | 1.08684784 | |
| 36 | 0.962519663 |
| Optimization Technique | IMPAPSO | MPA | PSO [35] |
|---|---|---|---|
| Ploss (MW) | 26.8788280163276 | 26.89276024 | 29.535 |
| Control Variables | Voltage at Bus 1 | 0.9785146 |
| 2 | 1.052823232 | |
| 3 | 0.974021524 | |
| 6 | 1.011493737 | |
| 8 | 1.057673755 | |
| 9 | 1.018774788 | |
| 12 | 1.010605445 | |
| Shunt Capacitor at Bus 18 | 2.221922839 | |
| 25 | 9.245578409 | |
| 53 | 7.19914277 | |
| Transformer Setting at Branch 19 | 0.958381183 | |
| 20 | 0.904800844 | |
| 31 | 1.006567915 | |
| 35 | 0.98703182 | |
| 36 | 1.023725329 | |
| 37 | 1.001223982 | |
| 41 | 0.928721206 | |
| 46 | 0.9501672 | |
| 54 | 0.900034255 | |
| 58 | 0.929622764 | |
| 59 | 0.917319339 | |
| 65 | 0.935144142 | |
| 66 | 0.90000018 | |
| 71 | 0.910289969 | |
| 73 | 1.004015592 | |
| 76 | 0.971722216 | |
| 80 | 0.921100395 |
| Optimization Technique | IMPAPSO | MPA | PSO [35] |
|---|---|---|---|
| VD (p.u) | 0.68105882128425 | 0.685217269 | 0.90660 |
| Control Variables | Voltage at Bus 1 | 1.051118197 |
| 2 | 1.006268088 | |
| 3 | 1.055046116 | |
| 6 | 1.016574856 | |
| 8 | 1.039084119 | |
| 9 | 0.986277586 | |
| 12 | 1.053706517 | |
| Shunt Capacitor at Bus 18 | 19.989606 | |
| 25 | 17.41486434 | |
| 53 | 19.99677651 | |
| Transformer Setting at Branch 19 | 1.036557631 | |
| 20 | 1.037392917 | |
| 31 | 0.972303544 | |
| 35 | 1.099043364 | |
| 36 | 1.08965409 | |
| 37 | 1.008104923 | |
| 41 | 0.984263129 | |
| 46 | 0.918450377 | |
| 54 | 0.900000712 | |
| 58 | 0.917622635 | |
| 59 | 0.959332835 | |
| 65 | 0.989726479 | |
| 66 | 0.900000408 | |
| 71 | 0.916607993 | |
| 73 | 1.016134546 | |
| 76 | 0.900040954 | |
| 80 | 0.9708587 |
| Optimization Technique | IMPAPSO | MPA | PSOGWO [35] | PSO [35] | ABC [36] | HFA [36] | FA [36] | HHO [35] |
|---|---|---|---|---|---|---|---|---|
| Ploss (MW) | 125.354105139297 | 130.3235948 | 131.84580 | 131.89750 | 136.990 | 134.240 | 135.420 | 132.03940 |
| Control Variables | Voltage at Bus 1 | 1.059999971 | 89 | 1.043844801 |
| 4 | 1.016416799 | 90 | 1.059992049 | |
| 6 | 1.06 | 91 | 1.051300073 | |
| 8 | 1.054076587 | 92 | 0.985511829 | |
| 10 | 1.059994707 | 99 | 1.039516442 | |
| 12 | 0.99410918 | 100 | 0.949906401 | |
| 15 | 1.059994953 | 103 | 1.012269278 | |
| 18 | 1.05999862 | 104 | 1.059986665 | |
| 19 | 1.025883595 | 105 | 0.940166842 | |
| 24 | 1.05764573 | 107 | 1.059968135 | |
| 25 | 1.046345645 | 110 | 1.059984578 | |
| 26 | 1.05986919 | 111 | 0.954159655 | |
| 27 | 0.965620528 | 112 | 1.0599967 | |
| 31 | 1.000735126 | 113 | 1.014186953 | |
| 32 | 1.058388897 | 116 | 1.059999935 | |
| 34 | 0.985688654 | Shunt Capacitor at Bus 5 | 3.380169875 | |
| 36 | 1.059790134 | 34 | -2.821486649 | |
| 40 | 0.940000553 | 37 | 9.324728941 | |
| 42 | 1.058036022 | 44 | 4.426816441 | |
| 46 | 0.940001102 | 45 | 19.99999749 | |
| 49 | 1.059922276 | 46 | 8.73004765 | |
| 54 | 1.059983552 | 48 | 4.575662665 | |
| 55 | 1.059999944 | 74 | 11.57140726 | |
| 56 | 1.039426027 | 79 | -0.964210364 | |
| 59 | 1.005329927 | 82 | 0.990696573 | |
| 61 | 1.059817583 | 83 | -5.073112353 | |
| 62 | 1.059999911 | 105 | 1.021595682 | |
| 65 | 0.955835273 | 107 | 0.999709578 | |
| 66 | 1.06 | 110 | 0.986601382 | |
| 69 | 1.059395276 | Transformer Setting at Branch 8 | 1.016684284 | |
| 70 | 1.056639777 | 32 | 0.959359111 | |
| 72 | 1.000774907 | 36 | 1.054434837 | |
| 73 | 1.058904539 | 51 | 0.904481479 | |
| 74 | 1.002748512 | 93 | 1.082529747 | |
| 76 | 0.949002597 | 95 | 1.078129104 | |
| 77 | 1.059608733 | 102 | 1.1 | |
| 80 | 0.940002246 | 107 | 0.972662338 | |
| 85 | 1.059572717 | 127 | 1.099804308 | |
| 87 | 1.054263227 |
| Optimization Technique | IMPAPSO | MPA | PSOGWO [35] | HHO [35] | PSO [35] |
|---|---|---|---|---|---|
| VD (p.u) | 1.25866740953567 | 1.2610343 | 1.26654835 | 1.35920 | 1.4090 |
| Control Variables | Voltage at Bus 1 | 0.994744207 | 89 | 1.059872194 |
| 4 | 1.032754573 | 90 | 1.052362524 | |
| 6 | 0.983468712 | 91 | 1.000606645 | |
| 8 | 0.996835667 | 92 | 1.027502208 | |
| 10 | 1.000996814 | 99 | 0.974053361 | |
| 12 | 0.994056075 | 100 | 1.031654994 | |
| 15 | 1.041411962 | 103 | 1.059959876 | |
| 18 | 0.984647591 | 104 | 1.050964784 | |
| 19 | 1.014996157 | 105 | 1.054261795 | |
| 24 | 1.059172072 | 107 | 0.960638959 | |
| 25 | 0.987716176 | 110 | 1.058150059 | |
| 26 | 1.055771589 | 111 | 0.963489053 | |
| 27 | 1.059488942 | 112 | 1.059578383 | |
| 31 | 0.987511863 | 113 | 1.002132787 | |
| 32 | 1.055898994 | 116 | 1.059829228 | |
| 34 | 1.059602516 | Shunt Capacitor at Bus 5 | 15.28908452 | |
| 36 | 0.989330128 | 34 | -15.47848546 | |
| 40 | 1.048635268 | 37 | 19.81999374 | |
| 42 | 1.058931563 | 44 | 5.309899212 | |
| 46 | 1.01135405 | 45 | 14.44671525 | |
| 49 | 1.048205061 | 46 | 7.474022543 | |
| 54 | 0.990518429 | 48 | -19.89917294 | |
| 55 | 1.055245907 | 74 | -19.98714174 | |
| 56 | 1.041952777 | 79 | 19.99555592 | |
| 59 | 1.050709535 | 82 | 0.999385959 | |
| 61 | 0.951404691 | 83 | 19.52520002 | |
| 62 | 1.054768167 | 105 | 0.982597669 | |
| 65 | 1.0311581 | 107 | 1.002484969 | |
| 66 | 1.058380064 | 110 | 1.01887486 | |
| 69 | 1.024901644 | Transformer Setting at Branch 8 | 0.995503204 | |
| 70 | 1.054006711 | 32 | 0.963829517 | |
| 72 | 1.058519122 | 36 | 0.900014144 | |
| 73 | 1.035636318 | 51 | 0.947148952 | |
| 74 | 0.948833087 | 93 | 1.099941872 | |
| 76 | 1.030934246 | 95 | 0.952418082 | |
| 77 | 1.058779616 | 102 | 0.92300055 | |
| 80 | 1.056437785 | 107 | 0.900249471 | |
| 85 | 1.033487371 | 127 | 1.058883247 | |
| 87 | 1.056857442 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaheen, M.A.M.; Yousri, D.; Fathy, A.; Hasanien, H.M.; Alkuhayli, A.; Muyeen, S.M. A Novel Application of Improved Marine Predators Algorithm and Particle Swarm Optimization for Solving the ORPD Problem. Energies 2020, 13, 5679. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215679
Shaheen MAM, Yousri D, Fathy A, Hasanien HM, Alkuhayli A, Muyeen SM. A Novel Application of Improved Marine Predators Algorithm and Particle Swarm Optimization for Solving the ORPD Problem. Energies. 2020; 13(21):5679. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215679
Chicago/Turabian StyleShaheen, Mohamed A. M., Dalia Yousri, Ahmed Fathy, Hany M. Hasanien, Abdulaziz Alkuhayli, and S. M. Muyeen. 2020. "A Novel Application of Improved Marine Predators Algorithm and Particle Swarm Optimization for Solving the ORPD Problem" Energies 13, no. 21: 5679. https://0-doi-org.brum.beds.ac.uk/10.3390/en13215679