
Stratified Control Applied to a Three-Phase Unbalanced Low Voltage Distribution Grid in a Local Peer-to-Peer Energy Community

 , , , and
, , , and
Abstract
:1. Introduction
- 1
- 2
- Online three-phase unbalance minimization control scheme in low voltage distribution networks (see Section 4.1.1) in an LEC.
- 3
- Three-phase unbalance optimal power flow with receding horizon formulation for optimal flexibility placement (see Section 4.1.2) and voltage controllability (see Section 4.1.3 and Section 6).
- 4
- Schedules from the grid controller are generated at the PCC, ensuring privacy. No device information from the buildings is communicated to the grid controller.
- 5
- Mixed integer quadratic three-phase unbalanced model predictive control hosted in flexibilities with various electrical connection configurations and thermal models (see Section 5.1).
- 6
- Optimal scheduling of PQ set-points at critical buses, where smart buildings are connected and model predictive control results from flexibilities to the reference optimal schedules from the grid controller (see Section 7).
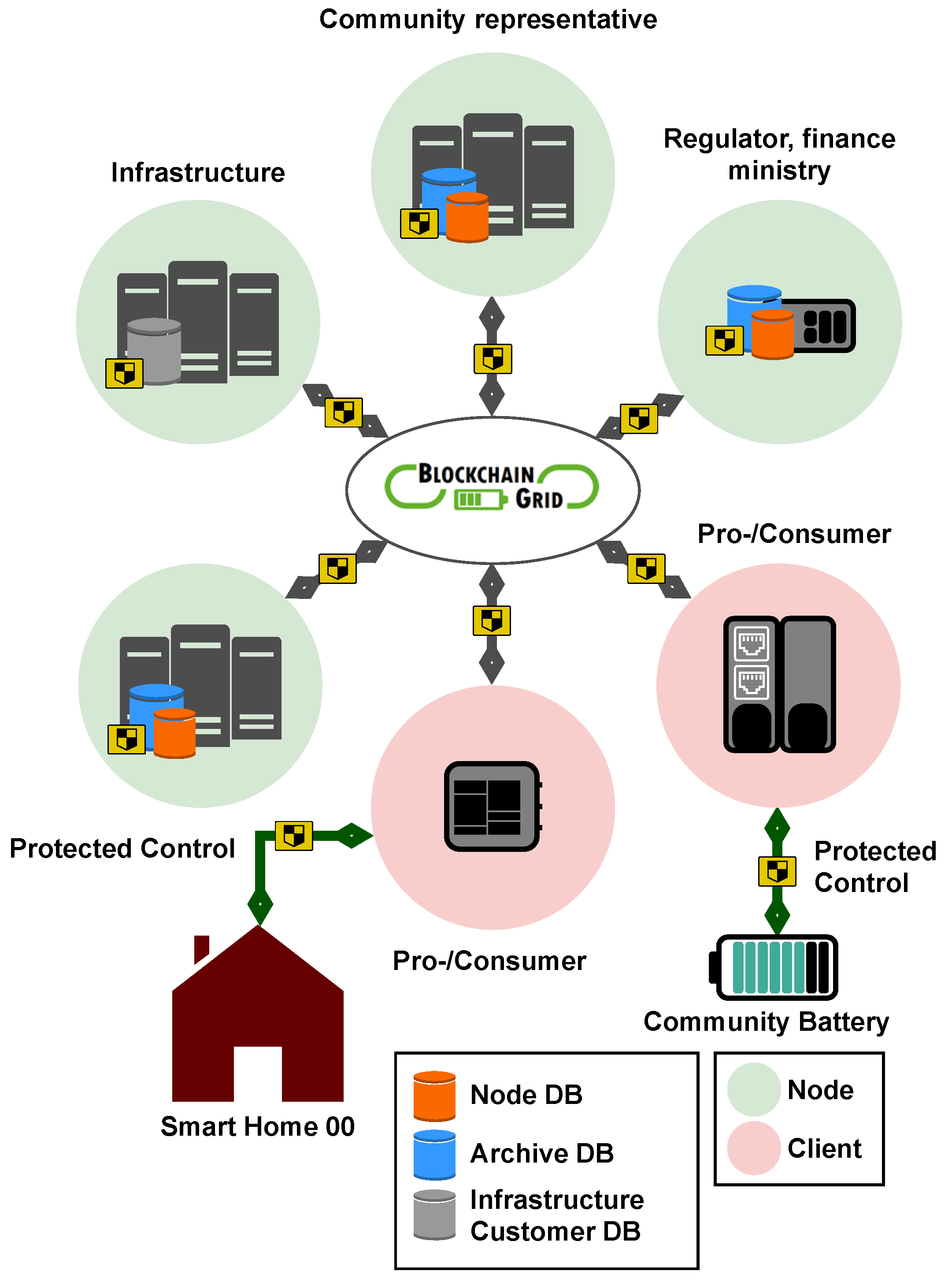
2. Blockchain System Architecture
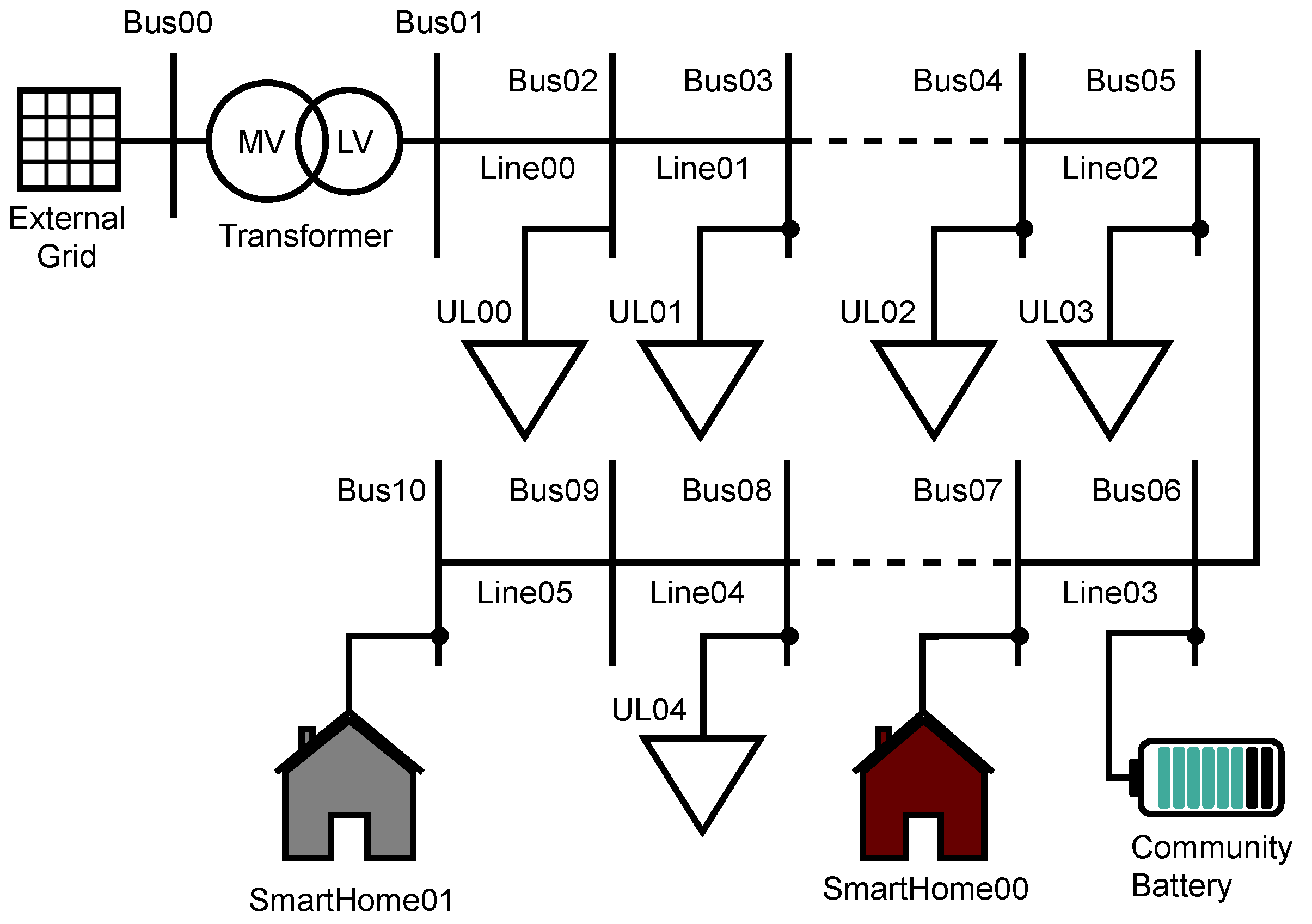
3. Stratified Control Scheme for Low Voltage Distribution Networks
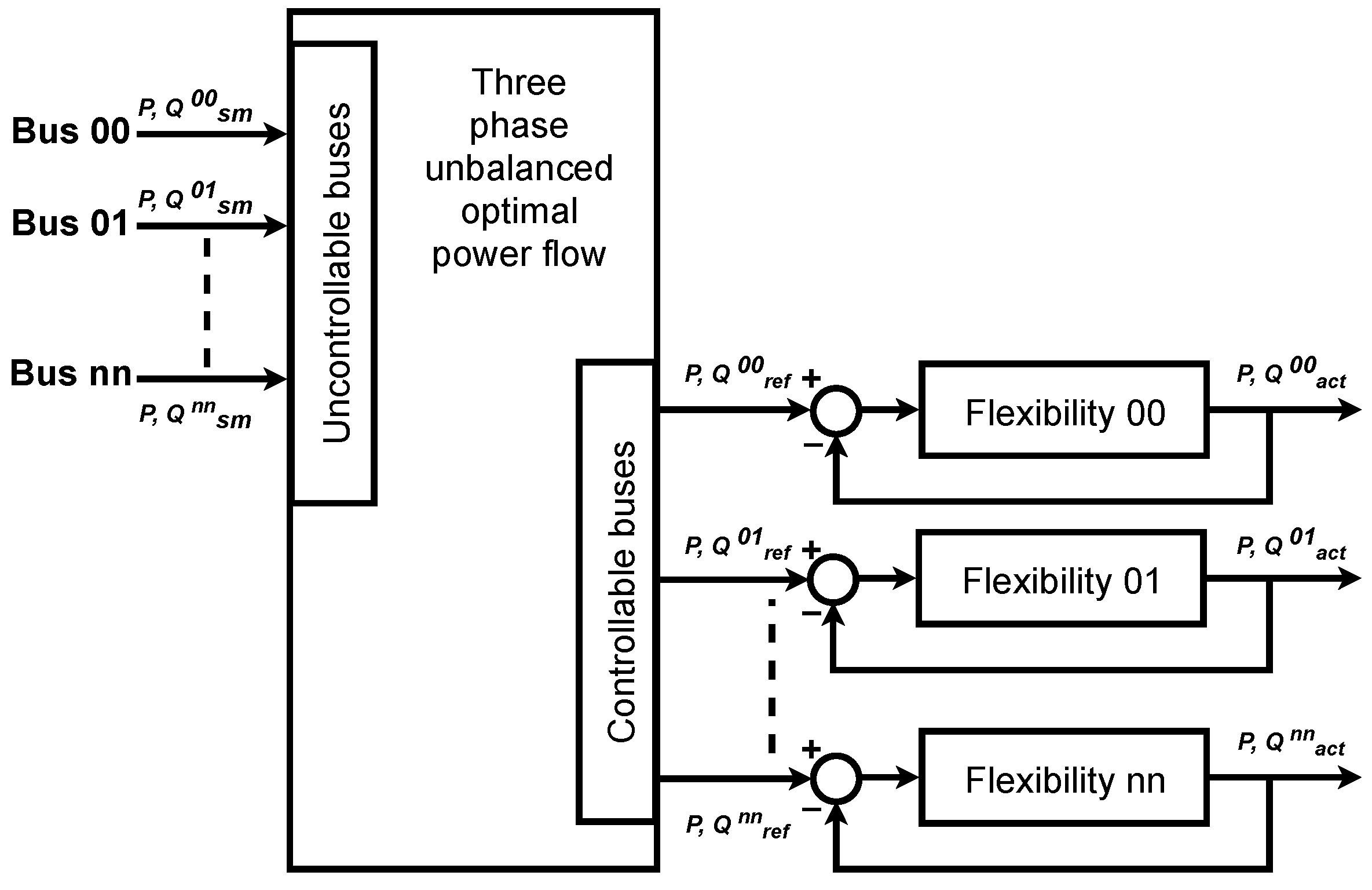
4. Grid Controller Formulation
4.1. Objective Functions
4.1.1. Three-Phase Unbalance Minimization
4.1.2. Optimal Placement of Flexibilities
4.1.3. Voltage Controllability
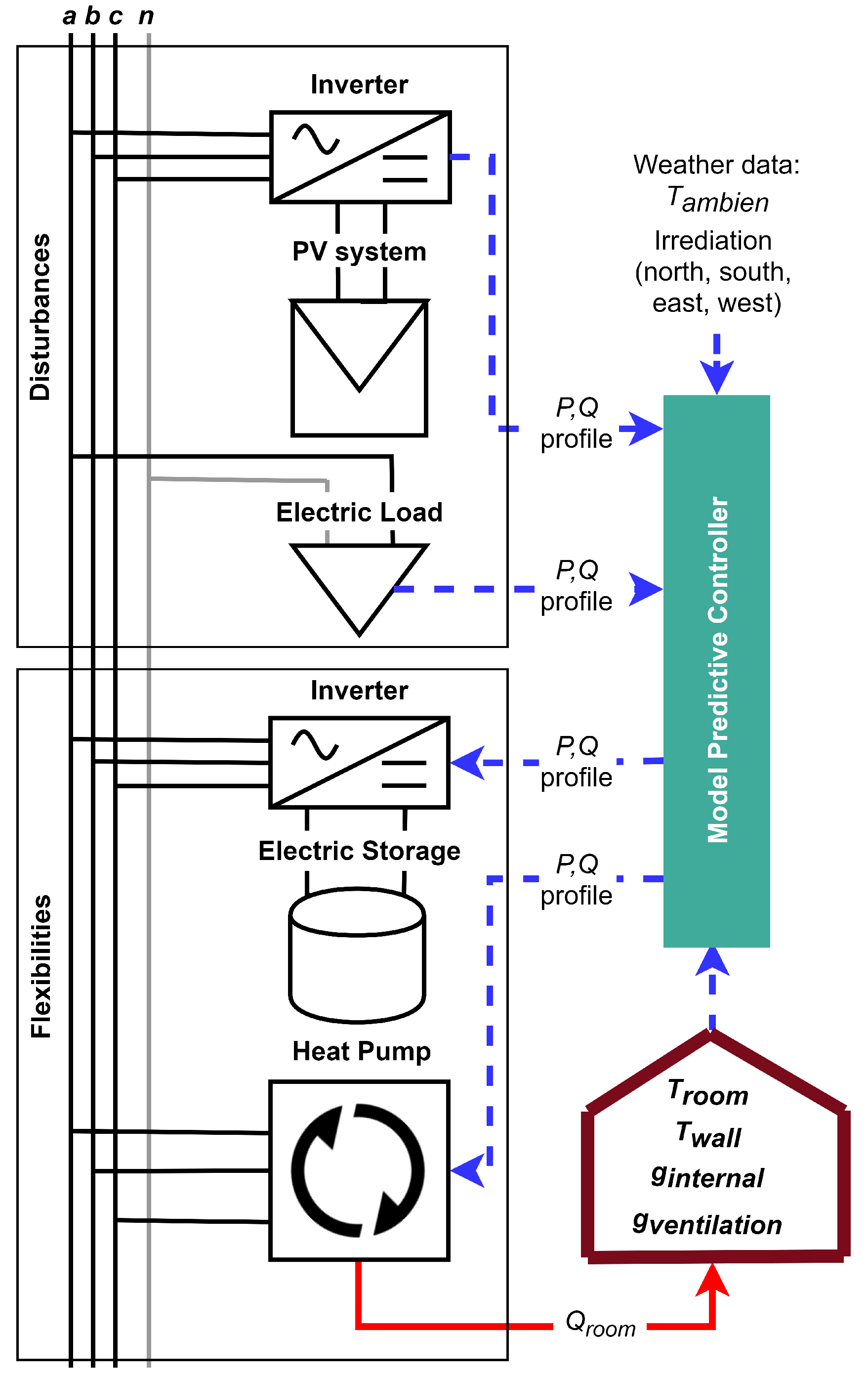
5. Flexibility Controller Formulation
5.1. Smart Building Thermal Model
5.2. Constraints on Heat-Pump
5.3. Constraints on Electric Storage
5.4. Constraints on Inverter
5.5. Constraints on Controllable Loads
5.6. Constraints at Grid Connection Point
5.7. Objective Function
6. Control Strategy
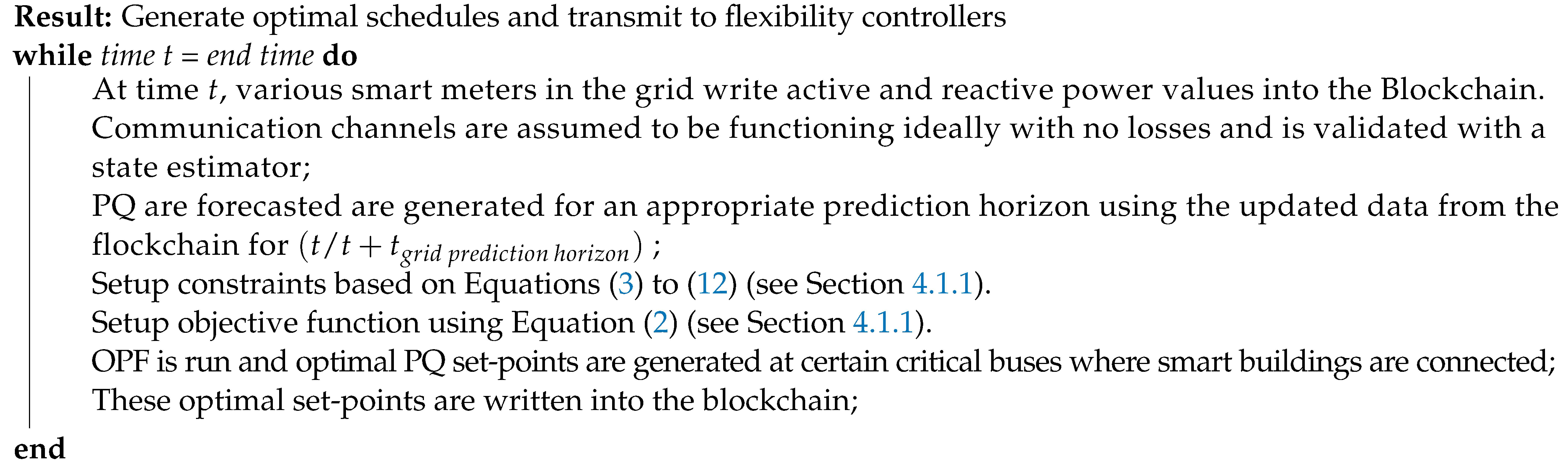
6.1. Grid Control
| Algorithm 1: Control actions performed at grid level controller |
 |
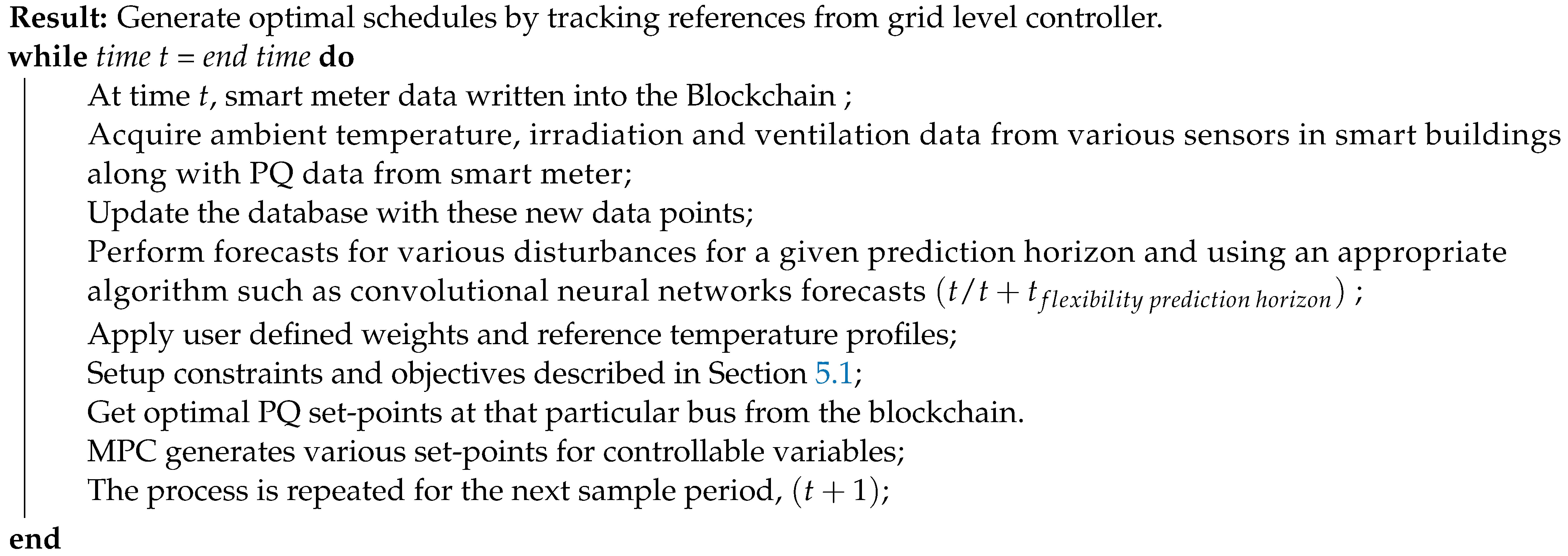
6.2. Flexibility Control
| Algorithm 2: Control actions performed at flexibility level controller |
 |
7. Simulation and Results
8. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Babaiahgari, B.; Ullah, M.H.; Park, J.D. Coordinated Control and Dynamic Optimization in DC Microgrid Systems. Int. J. Electr. Power Energy Syst. 2019, 113, 832–841. [Google Scholar] [CrossRef]
- Bazmohammadi, N.; Tahsiri, A.; Anvari-Moghaddam, A.; Guerrero, J.M. A Hierarchical Energy Management Strategy for Interconnected Microgrids Considering Uncertainty. Int. J. Electr. Power Energy Syst. 2019, 109, 597–608. [Google Scholar] [CrossRef]
- Dou, C.X.; Liu, B. Hierarchical Hybrid Control for Improving Comprehensive Performance in Smart Power System. Int. J. Electr. Power Energy Syst. 2012, 43, 595–606. [Google Scholar] [CrossRef]
- Brandstetter, M.; Schirrer, A.; Miletić, M.; Henein, S.; Kozek, M.; Kupzog, F. Hierarchical Predictive Load Control in Smart Grids. IEEE Trans. Smart Grid 2017, 8, 190–199. [Google Scholar] [CrossRef]
- Glavitsch, H.; Bacher, R. Optimal Power Flow Algorithms. In Control and Dynamic Systems; Elsevier: Amsterdam, The Netherlands, 1991; Volume 41, pp. 135–205. [Google Scholar] [CrossRef]
- Dommel, H.W.; Tinney, W.F. Optimal Power Flow Solutions. IEEE Trans. Power Appar. Syst. 1968, PAS-87, 1866–1876. [Google Scholar] [CrossRef]
- Stott, B.; Hobson, E. Power System Security Control Calculations Using Linear Programming, Part I. IEEE Trans. Power Appar. Syst. 1978, PAS-97, 1713–1720. [Google Scholar] [CrossRef]
- Stott, B.; Hobson, E. Power System Security Control Calculations Using Linear Programming, Part II. IEEE Trans. Power Appar. Syst. 1978, PAS-97, 1721–1731. [Google Scholar] [CrossRef]
- Rao, B.V.; Kupzog, F.; Kozek, M. Three-Phase Unbalanced Optimal Power Flow Using Holomorphic Embedding Load Flow Method. Sustainability 2019, 11, 1774. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Li, P.; Li, S.; Zhang, L.; Sun, Y.; Li, P.; Li, S.; Zhang, L. Contribution Determination for Multiple Unbalanced Sources at the Point of Common Coupling. Energies 2017, 10, 171. [Google Scholar] [CrossRef] [Green Version]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A Review on the State-of-the-Art Technologies of Electric Vehicle, Its Impacts and Prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Karimi, M.; Mokhlis, H.; Naidu, K.; Uddin, S.; Bakar, A. Photovoltaic Penetration Issues and Impacts in Distribution Network—A Review. Renew. Sustain. Energy Rev. 2016, 53, 594–605. [Google Scholar] [CrossRef]
- Al-badi, A.H.; Ieee, S.M.; Elmoudi, A.; Metwally, I.; Ieee, S.M.; Al-wahaibi, A.; Al-ajmi, H.; Bulushi, M.A. Losses Reduction in Distribution Transformers. In Proceedings of the International Multi Conference of Engineers and Computer Scientists 2011 (IMECS 2011), Hong Kong, China, 16–18 March 2011; Volume II. [Google Scholar]
- Gnacinski, P. Windings Temperature and Loss of Life of an Induction Machine Under Voltage Unbalance Combined With Over- or Undervoltages. IEEE Trans. Energy Convers. 2008, 23, 363–371. [Google Scholar] [CrossRef]
- Lee, S.Y.; Wu, C.J. On-Line Reactive Power Compensation Schemes for Unbalanced Three Phase Four Wire Distribution Feeders. IEEE Trans. Power Deliv. 1993, 8, 1958–1965. [Google Scholar] [CrossRef]
- Soltani, S.; Rashidinejad, M.; Abdollahi, A. Dynamic Phase Balancing in the Smart Distribution Networks. Int. J. Electr. Power Energy Syst. 2017, 93, 374–383. [Google Scholar] [CrossRef]
- Zeng, X.; Zhai, H.; Wang, M.; Yang, M.; Wang, M. A System Optimization Method for Mitigating Three-Phase Imbalance in Distribution Network. Int. J. Electr. Power Energy Syst. 2019, 113, 618–633. [Google Scholar] [CrossRef]
- Kaveh, M.R.; Hooshmand, R.A.; Madani, S.M. Simultaneous Optimization of Re-Phasing, Reconfiguration and DG Placement in Distribution Networks Using BF-SD Algorithm. Appl. Soft Comput. 2018, 62, 1044–1055. [Google Scholar] [CrossRef]
- Soltani, S.; Rashidinejad, M.; Abdollahi, A. Stochastic Multiobjective Distribution Systems Phase Balancing Considering Distributed Energy Resources. IEEE Syst. J. 2018, 12, 2866–2877. [Google Scholar] [CrossRef]
- Mostafa, H.A.; El-Shatshat, R.; Salama, M.M.A. Multi-Objective Optimization for the Operation of an Electric Distribution System With a Large Number of Single Phase Solar Generators. IEEE Trans. Smart Grid 2013, 4, 1038–1047. [Google Scholar] [CrossRef]
- Schweickardt, G.; Alvarez, J.M.G.; Casanova, C. Metaheuristics Approaches to Solve Combinatorial Optimization Problems in Distribution Power Systems. An Application to Phase Balancing in Low Voltage Three-Phase Networks. Int. J. Electr. Power Energy Syst. 2016, 76, 1–10. [Google Scholar] [CrossRef]
- Wang, K.; Skiena, S.; Robertazzi, T.G. Phase Balancing Algorithms. Electr. Power Syst. Res. 2013, 96, 218–224. [Google Scholar] [CrossRef]
- Sun, S.; Liang, B.; Dong, M.; Taylor, J.A. Phase Balancing Using Energy Storage in Power Grids Under Uncertainty. IEEE Trans. Power Syst. 2016, 31, 3891–3903. [Google Scholar] [CrossRef] [Green Version]
- Watson, J.D.; Watson, N.R.; Lestas, I. Optimized Dispatch of Energy Storage Systems in Unbalanced Distribution Networks. IEEE Trans. Sustain. Energy 2018, 9, 639–650. [Google Scholar] [CrossRef]
- Mateo, V.; Gole, A.M.; Ho, C.N.M. Design and Implementation of Laboratory Scale Static Var Compensator to Demonstrate Dynamic Load Balancing and Power Factor Correction. In Proceedings of the 2017 IEEE Electrical Power and Energy Conference (EPEC), Saskatoon, SK, Canada, 22–25 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Nejabatkhah, F.; Li, Y.W. Flexible Unbalanced Compensation of Three-Phase Distribution System Using Single-Phase Distributed Generation Inverters. IEEE Trans. Smart Grid 2019, 10, 1845–1857. [Google Scholar] [CrossRef]
- Jia, L.; Yu, Z.; Murphy-Hoye, M.C.; Pratt, A.; Piccioli, E.G.; Tong, L. Multi-Scale Stochastic Optimization for Home Energy Management. In Proceedings of the 2011 4th IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), San Juan, Puerto Rico, 12–15 December 2011; pp. 113–116. [Google Scholar] [CrossRef] [Green Version]
- Giorgio, A.D.; Pimpinella, L.; Liberati, F. A Model Predictive Control Approach to the Load Shifting Problem in a Household Equipped with an Energy Storage Unit. In Proceedings of the 2012 20th Mediterranean Conference on Control Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 1491–1498. [Google Scholar] [CrossRef]
- Chen, C.; Wang, J.; Heo, Y.; Kishore, S. MPC-Based Appliance Scheduling for Residential Building Energy Management Controller. IEEE Trans. Smart Grid 2013, 4, 1401–1410. [Google Scholar] [CrossRef]
- Hidalgo Rodríguez, D.I.; Myrzik, J.M. Economic Model Predictive Control for Optimal Operation of Home Microgrid with Photovoltaic-Combined Heat and Power Storage Systems. IFAC-PapersOnLine 2017, 50, 10027–10032. [Google Scholar] [CrossRef]
- Godina, R.; Rodrigues, E.; Pouresmaeil, E.; Matias, J.; Catalão, J. Model Predictive Control Home Energy Management and Optimization Strategy with Demand Response. Appl. Sci. 2018, 8, 408. [Google Scholar] [CrossRef] [Green Version]
- Rao, B.; Kupzog, F.; Kozek, M. Phase Balancing Home Energy Management System Using Model Predictive Control. Energies 2018, 11, 3323. [Google Scholar] [CrossRef] [Green Version]
- Bazrafshan, M.; Gatsis, N. Comprehensive Modeling of Three-Phase Distribution Systems via the Bus Admittance Matrix. IEEE Trans. Power Syst. 2018, 33, 2015–2029. [Google Scholar] [CrossRef] [Green Version]
- Prakash, K.; Islam, F.R.; Mamun, K.A.; Ali, S. Optimal Generators Placement Techniques in Distribution Networks: A Review. In Proceedings of the 2017 Australasian Universities Power Engineering Conference (AUPEC), Melbourne, VIC, Australia, 19–22 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Tang, Y.; Low, S.H. Optimal Placement of Energy Storage in Distribution Networks. IEEE Trans. Smart Grid 2017, 8, 3094–3103. [Google Scholar] [CrossRef]
- Suresh, M.C.V.; Belwin, E.J. Optimal DG Placement for Benefit Maximization in Distribution Networks by Using Dragonfly Algorithm. Renew. Wind Water Sol. 2018, 5, 4. [Google Scholar] [CrossRef]
- Kobylinski, P.; Wierzbowski, M.; Piotrowski, K. High-Resolution Net Load Forecasting for Micro-Neighbourhoods with High Penetration of Renewable Energy Sources. Int. J. Electr. Power Energy Syst. 2020, 117, 105635. [Google Scholar] [CrossRef]
- Chaturvedi, D.; Sinha, A.; Malik, O. Short Term Load Forecast Using Fuzzy Logic and Wavelet Transform Integrated Generalized Neural Network. Int. J. Electr. Power Energy Syst. 2015, 67, 230–237. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Definition |
|---|---|
| P | Active power |
| Q | Reactive power |
| V | Voltage |
| t | Transformer tap position |
| Transformer phase shift angle | |
| s | shunt reactances or capacitances |
| I | Branch current magnitudes |
| Voltage phase angle |
| Optimal Buses | Bus 020 | Bus 031 | Bus 038 | Bus 042 | Bus 045 | Bus 055 | Bus 058 | Bus 067 | Bus 069 | Bus 077 |
| (kW) | 5 | 9 | 8 | 9 | 5 | 9 | 5 | 6 | 9 | - |
| (kW) | 1P | 1P | 3P | 1P | 3P | 1P | 1P | 1P | 1P | - |
| (kW) | 20 | 20 | 27 | 24 | 26 | 27 | 21 | 20 | 22 | 30 |
| (kWh) | 42 | 31 | 32 | 29 | 36 | 49 | 39 | 34 | 41 | 120 |
| (kW) | 19 | 16 | 10 | 6 | 15 | 10 | 9 | 16 | 13 | - |
| (kW) | 1P | 3P | 3P | 1P | 3P | 1P | 3P | 3P | 1P | - |
| Optimal Buses | Bus 081 | Bus 091 | Bus 092 | Bus 094 | Bus 099 | Bus 112 | Bus 117 | Bus 118 | Bus 140 | Bus 148 |
| (kW) | 6 | 6 | 5 | 5 | 8 | 8 | 7 | 8 | 7 | 8 |
| (kW) | 3P | 1P | 1P | 1P | 1P | 1P | 3P | 1P | 3P | 1P |
| (kW) | 24 | 22 | 27 | 26 | 26 | 23 | 20 | 27 | 26 | 21 |
| (kWh) | 28 | 32 | 26 | 29 | 41 | 30 | 43 | 44 | 31 | 31 |
| (kW) | 13 | 8 | 9 | 9 | 16 | 5 | 11 | 5 | 15 | 9 |
| (kW) | 3P | 3P | 3P | 1P | 3P | 3P | 1P | 1P | 1P | 1P |
| Optimal Buses | Bus 168 | Bus 169 | Bus 171 | Bus 184 | Bus 207 | Bus 217 | Bus 225 | Bus 234 | Bus 238 | Bus 241 |
| (kW) | 8 | 9 | 5 | 7 | 5 | 5 | 7 | 8 | 8 | 6 |
| (kW) | 3P | 3P | 3P | 1P | 3P | 3P | 1P | 3P | 1P | 1P |
| (kW) | 22 | 28 | 23 | 27 | 21 | 29 | 27 | 23 | 20 | 24 |
| (kWh) | 35 | 31 | 26 | 26 | 33 | 38 | 42 | 40 | 27 | 28 |
| (kW) | 16 | 16 | 6 | 11 | 14 | 13 | 12 | 7 | 5 | 11 |
| (kW) | 1P | 1P | 3P | 3P | 1P | 3P | 1P | 3P | 1P | 3P |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rao, B.V.; Stefan, M.; Schwalbe, R.; Karl, R.; Kupzog, F.; Kozek, M. Stratified Control Applied to a Three-Phase Unbalanced Low Voltage Distribution Grid in a Local Peer-to-Peer Energy Community. Energies 2021, 14, 3290. https://0-doi-org.brum.beds.ac.uk/10.3390/en14113290
Rao BV, Stefan M, Schwalbe R, Karl R, Kupzog F, Kozek M. Stratified Control Applied to a Three-Phase Unbalanced Low Voltage Distribution Grid in a Local Peer-to-Peer Energy Community. Energies. 2021; 14(11):3290. https://0-doi-org.brum.beds.ac.uk/10.3390/en14113290
Chicago/Turabian StyleRao, Bharath Varsh, Mark Stefan, Roman Schwalbe, Roman Karl, Friederich Kupzog, and Martin Kozek. 2021. "Stratified Control Applied to a Three-Phase Unbalanced Low Voltage Distribution Grid in a Local Peer-to-Peer Energy Community" Energies 14, no. 11: 3290. https://0-doi-org.brum.beds.ac.uk/10.3390/en14113290