
Fault Detection and Diagnosis Method of Distributed Photovoltaic Array Based on Fine-Tuning Naive Bayesian Model

Abstract
:1. Introduction
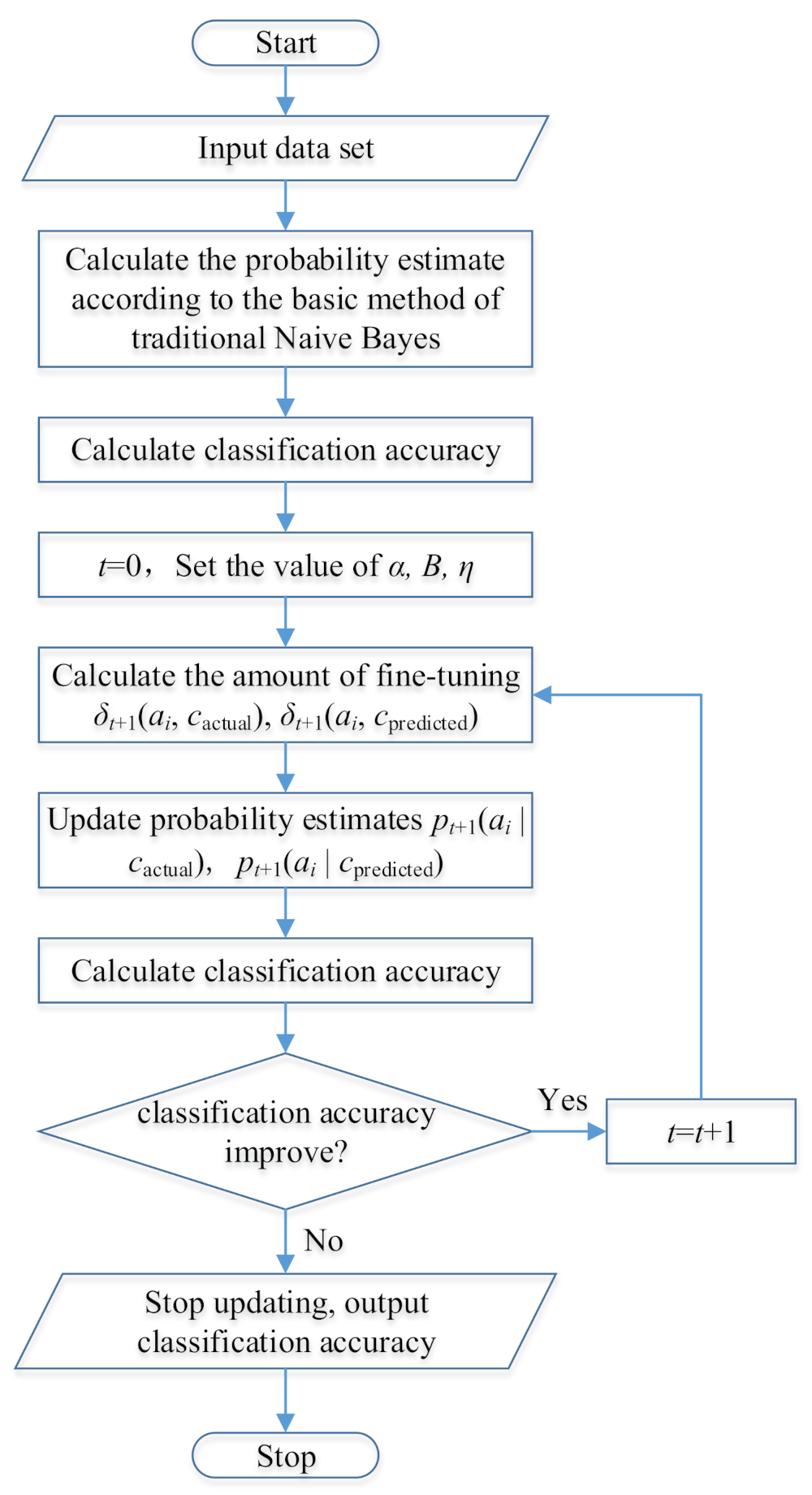
2. Fine-Tuning Naive Bayesian Model
3. Fault Diagnosis Method of PV Arrays Based on FTNB
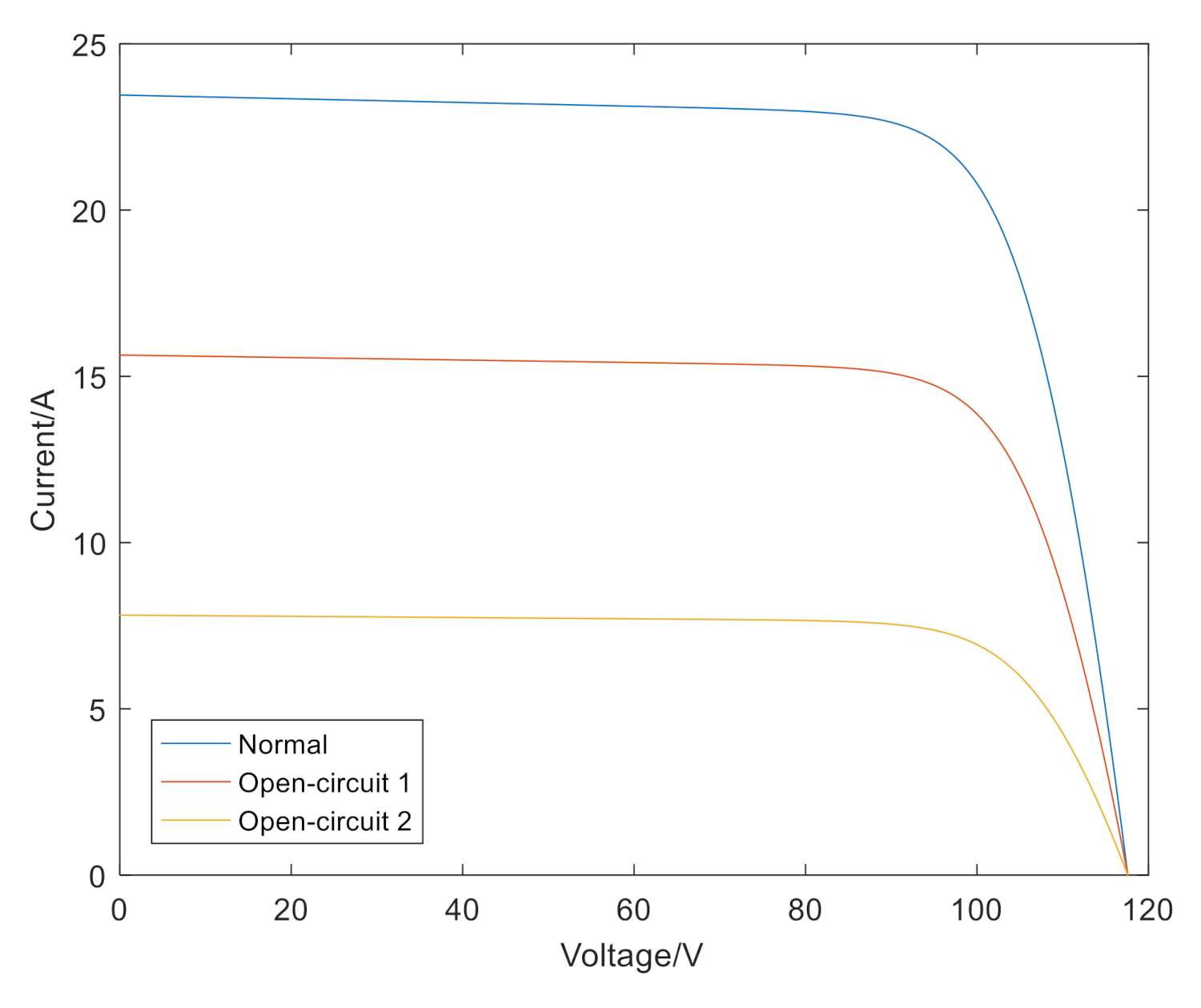
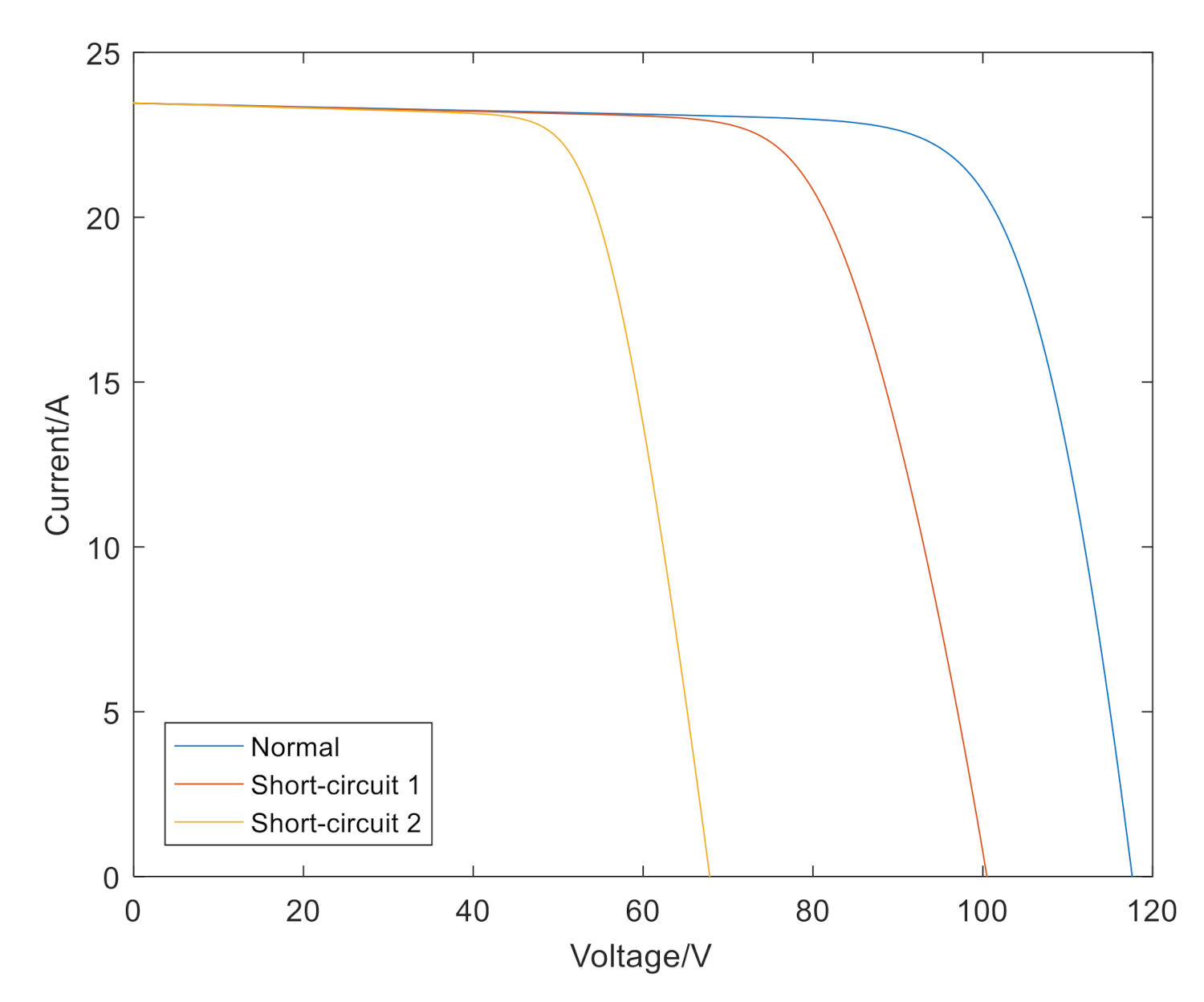
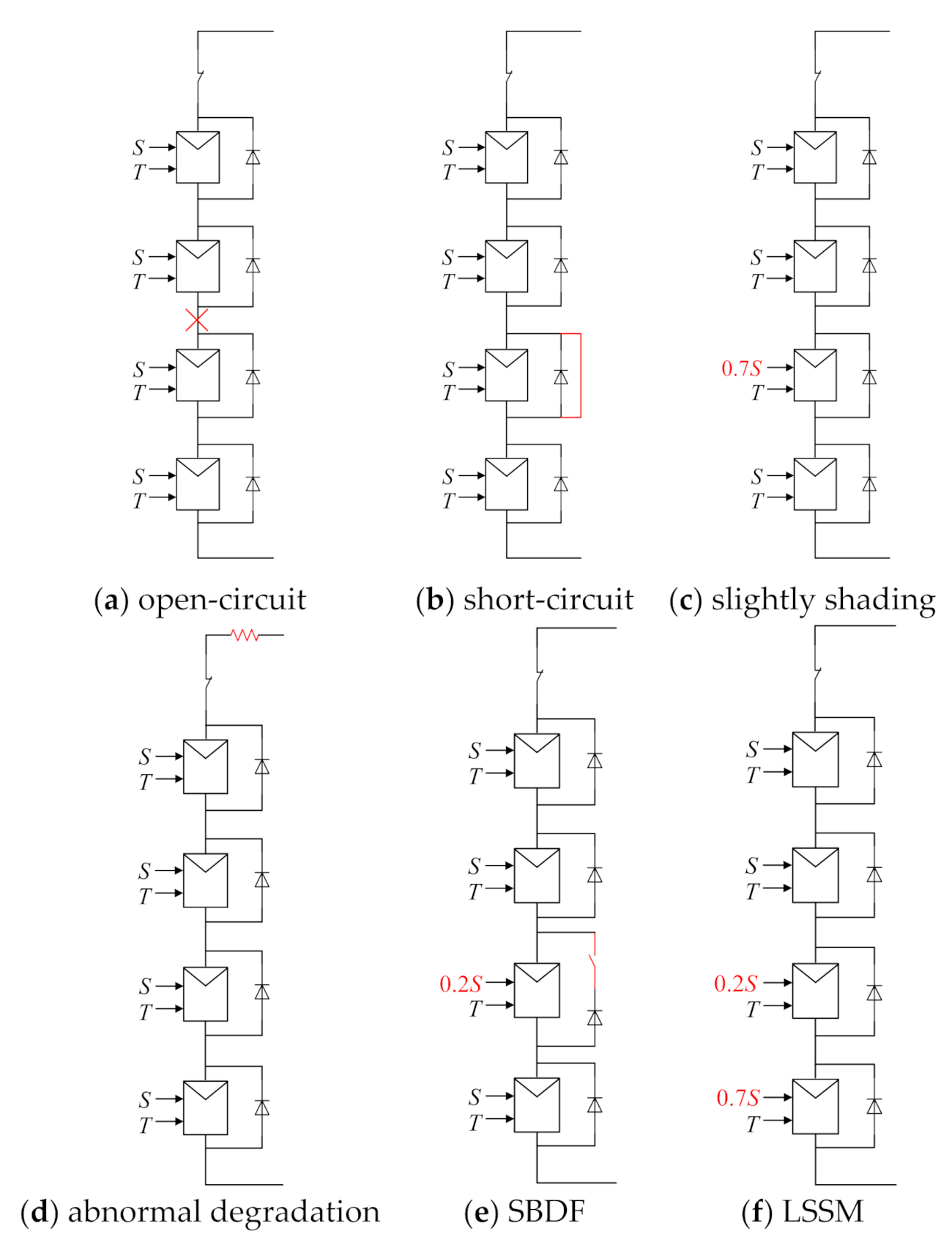
3.1. Description of PV Arrays Fault Problem
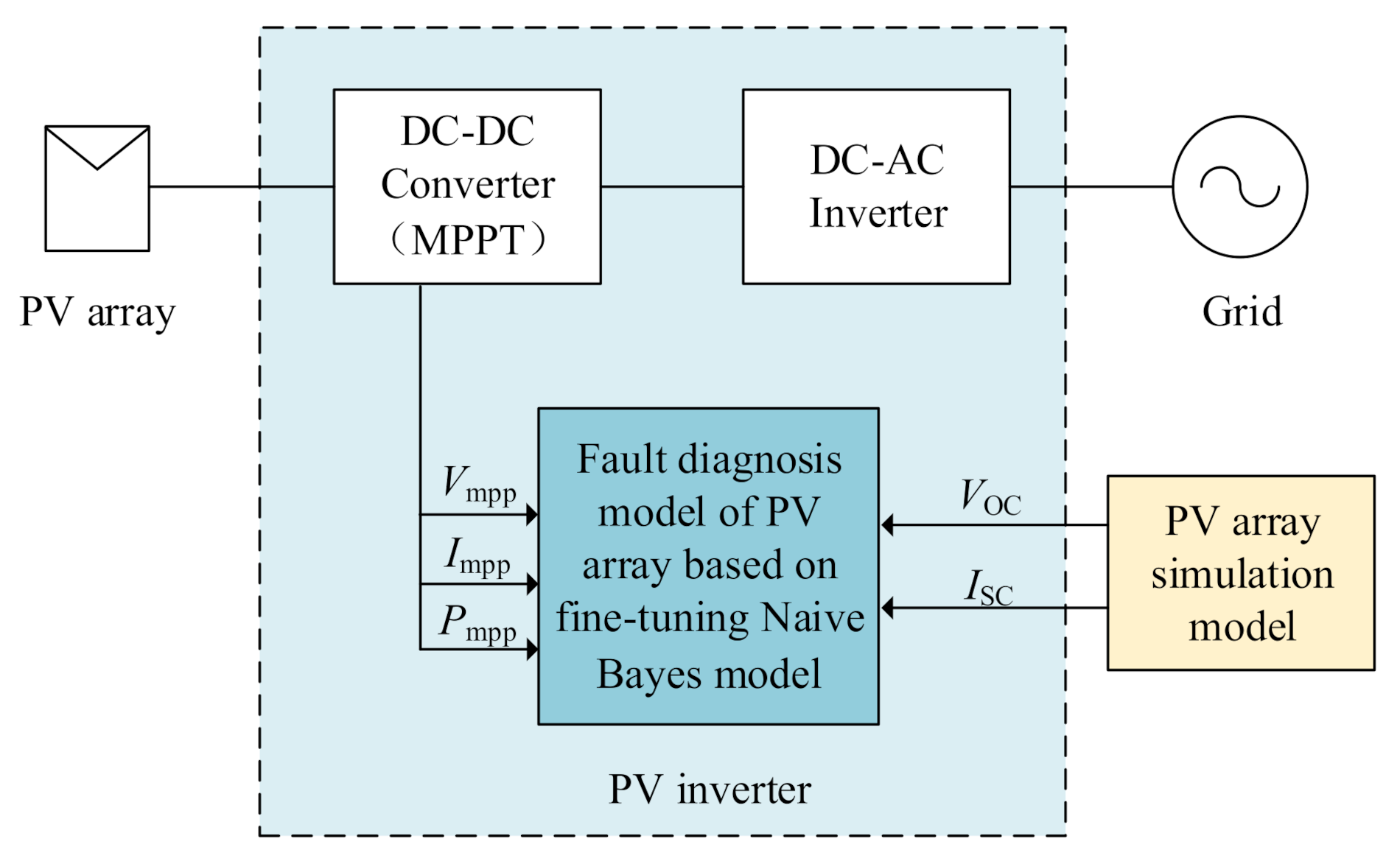
3.2. Fault Diagnosis Method
4. Experimental Verification
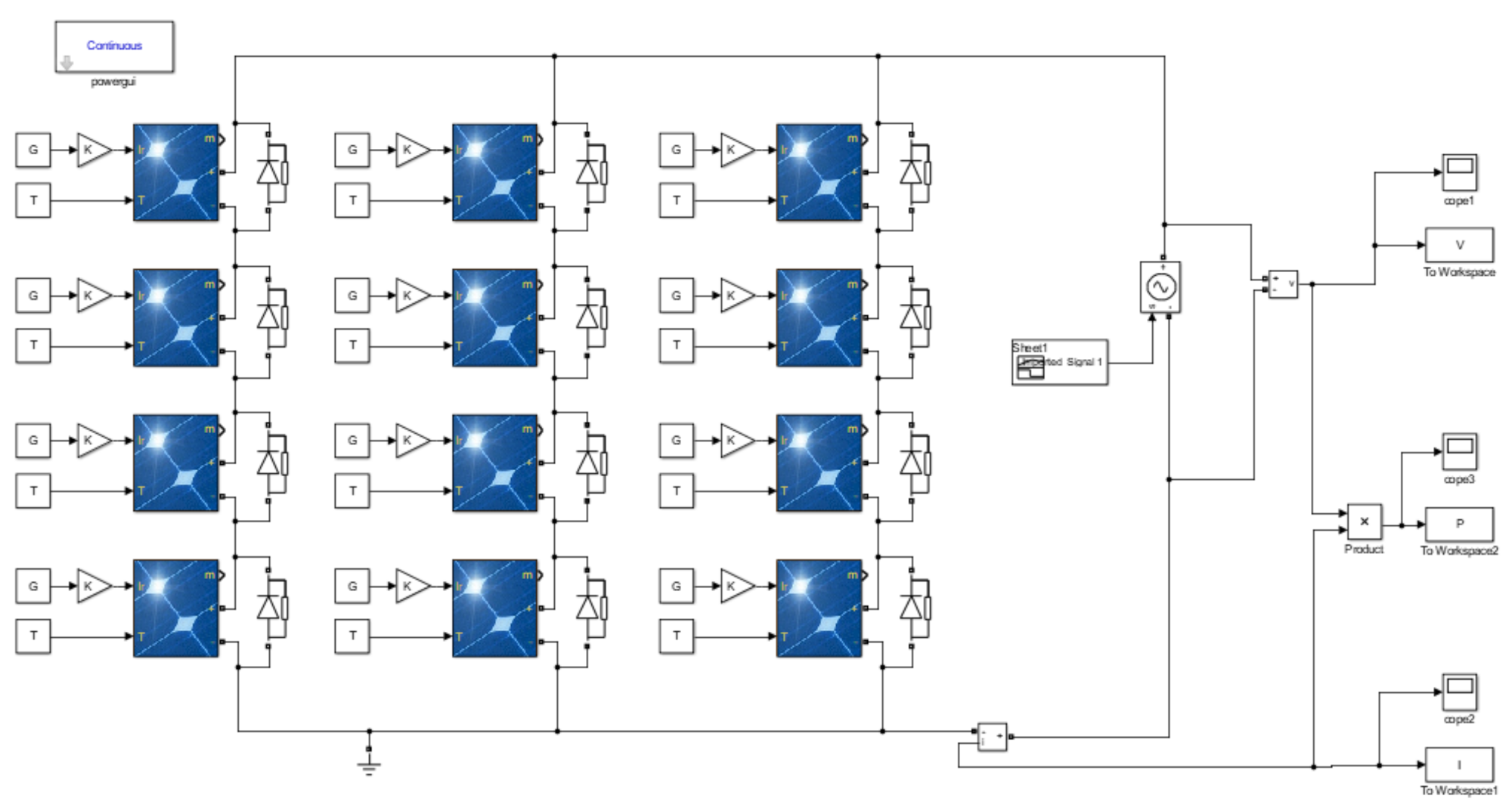
4.1. PV System Modeling
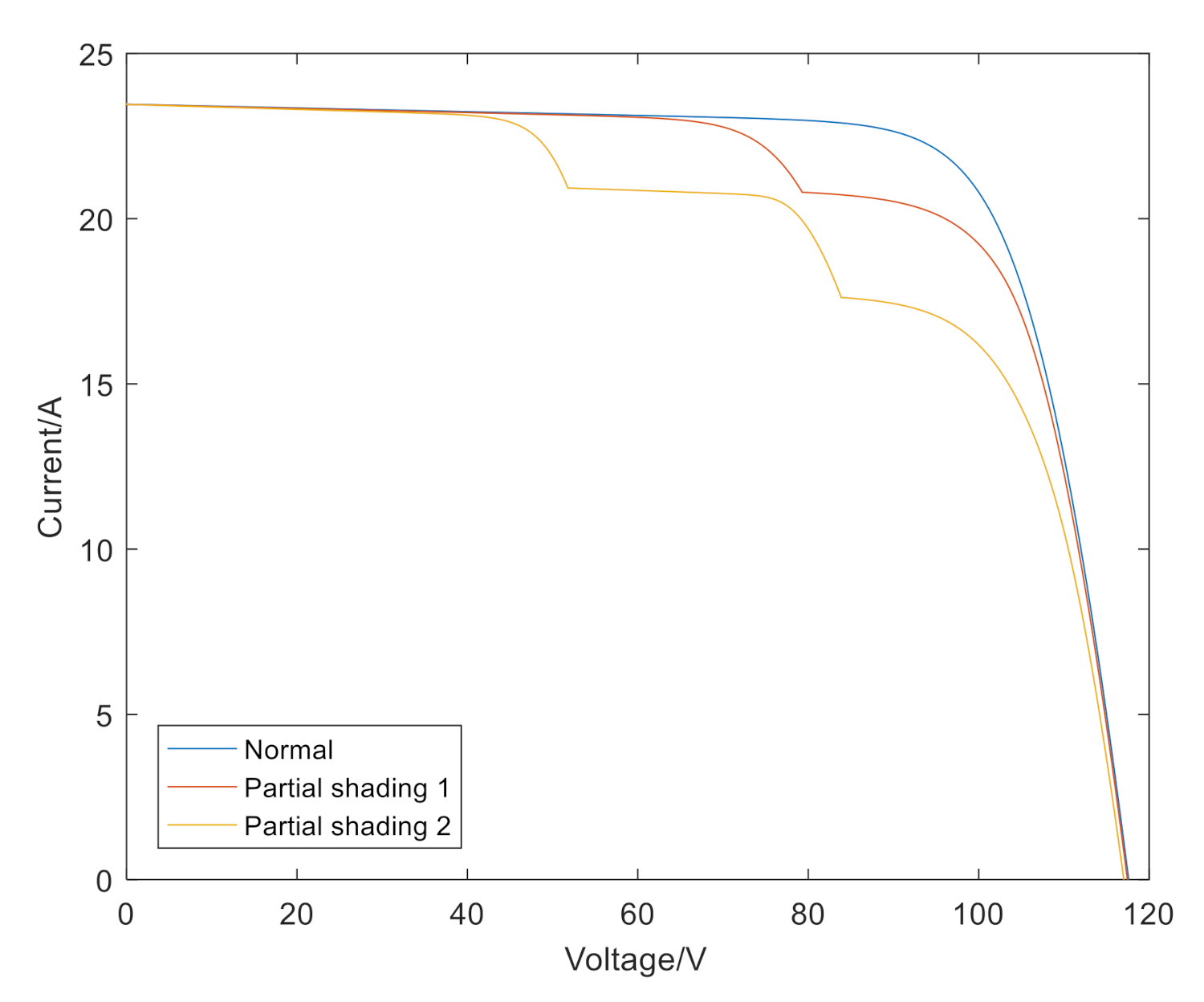
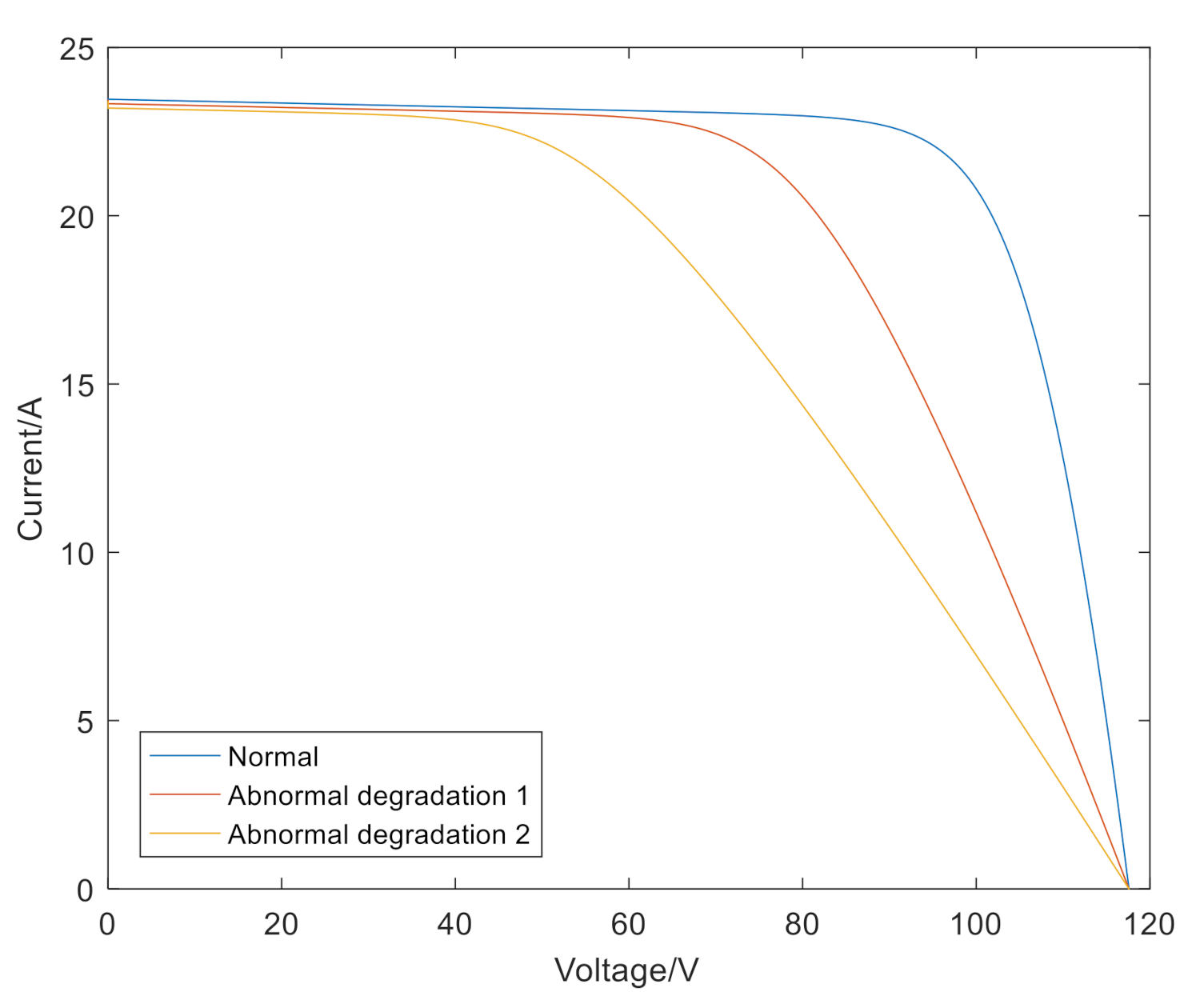
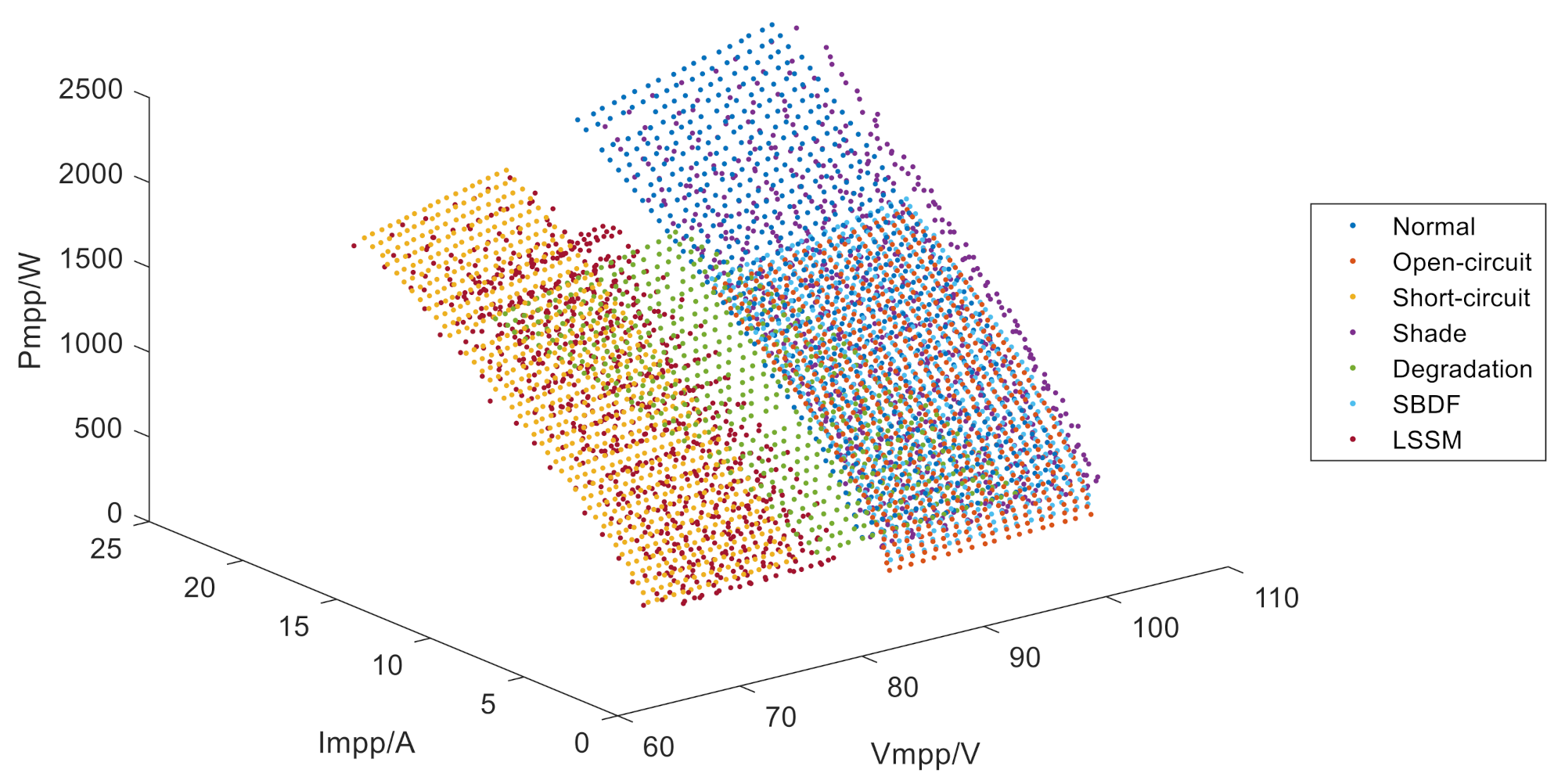
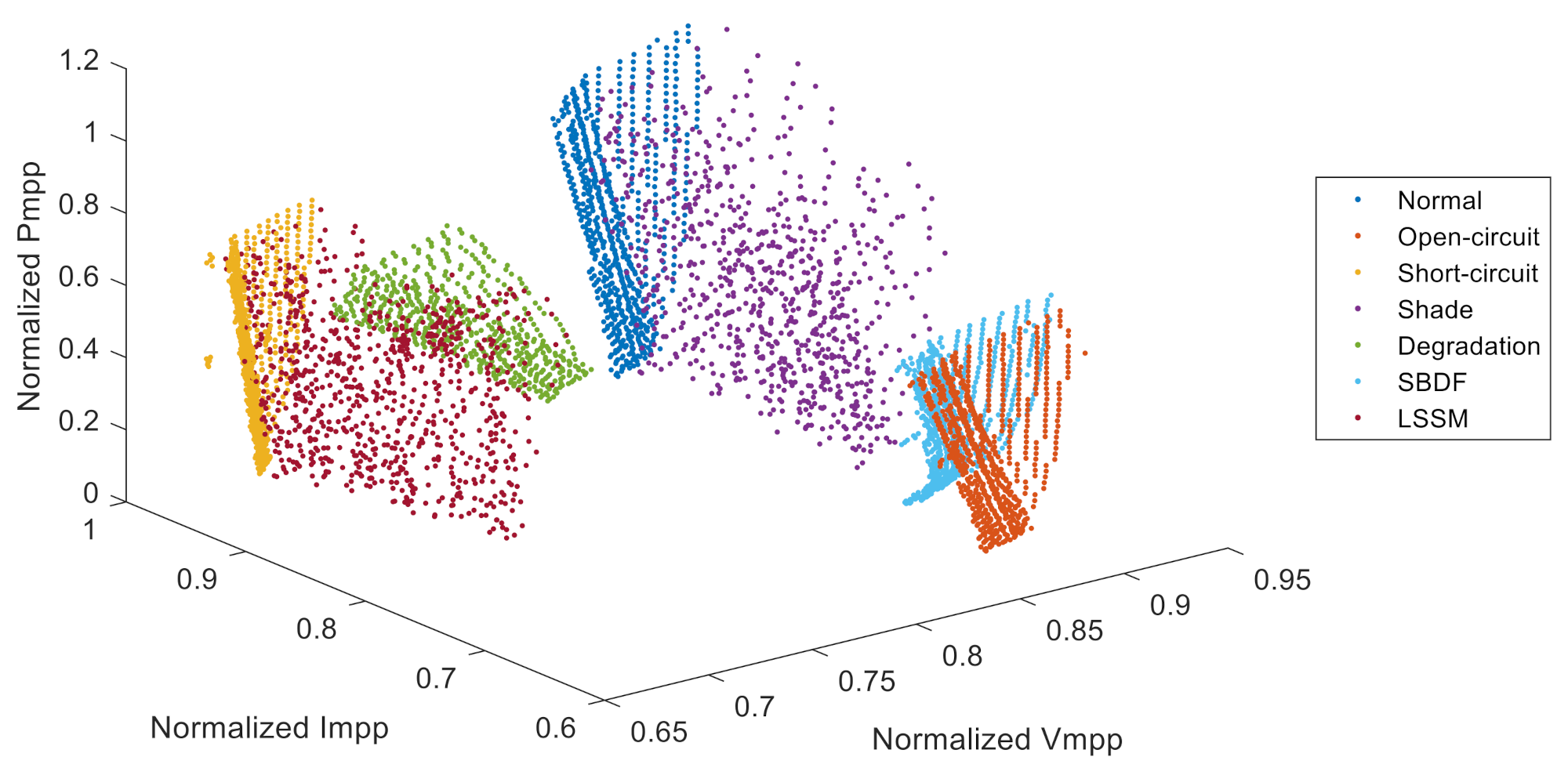
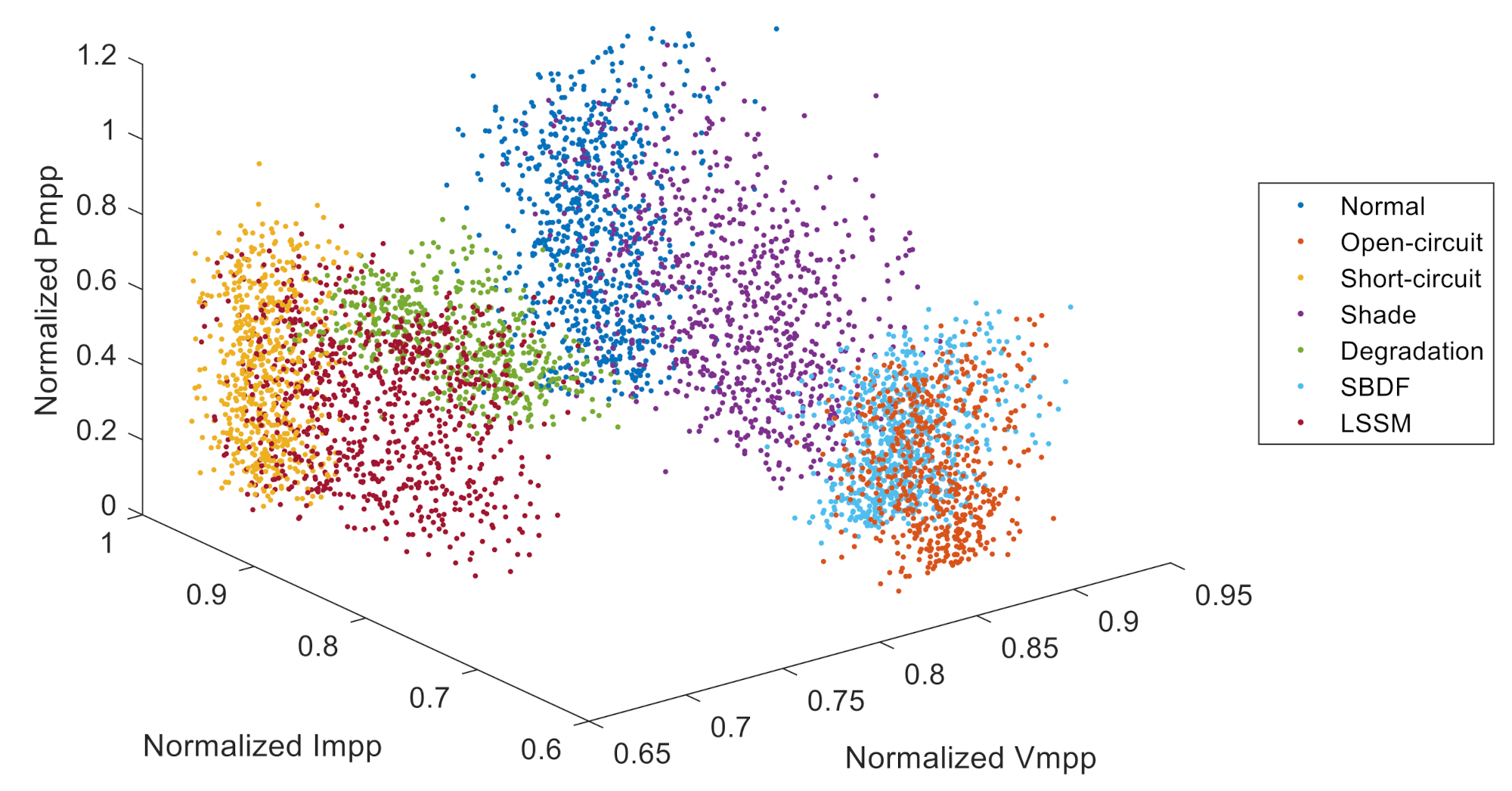
4.2. Fault Data Description
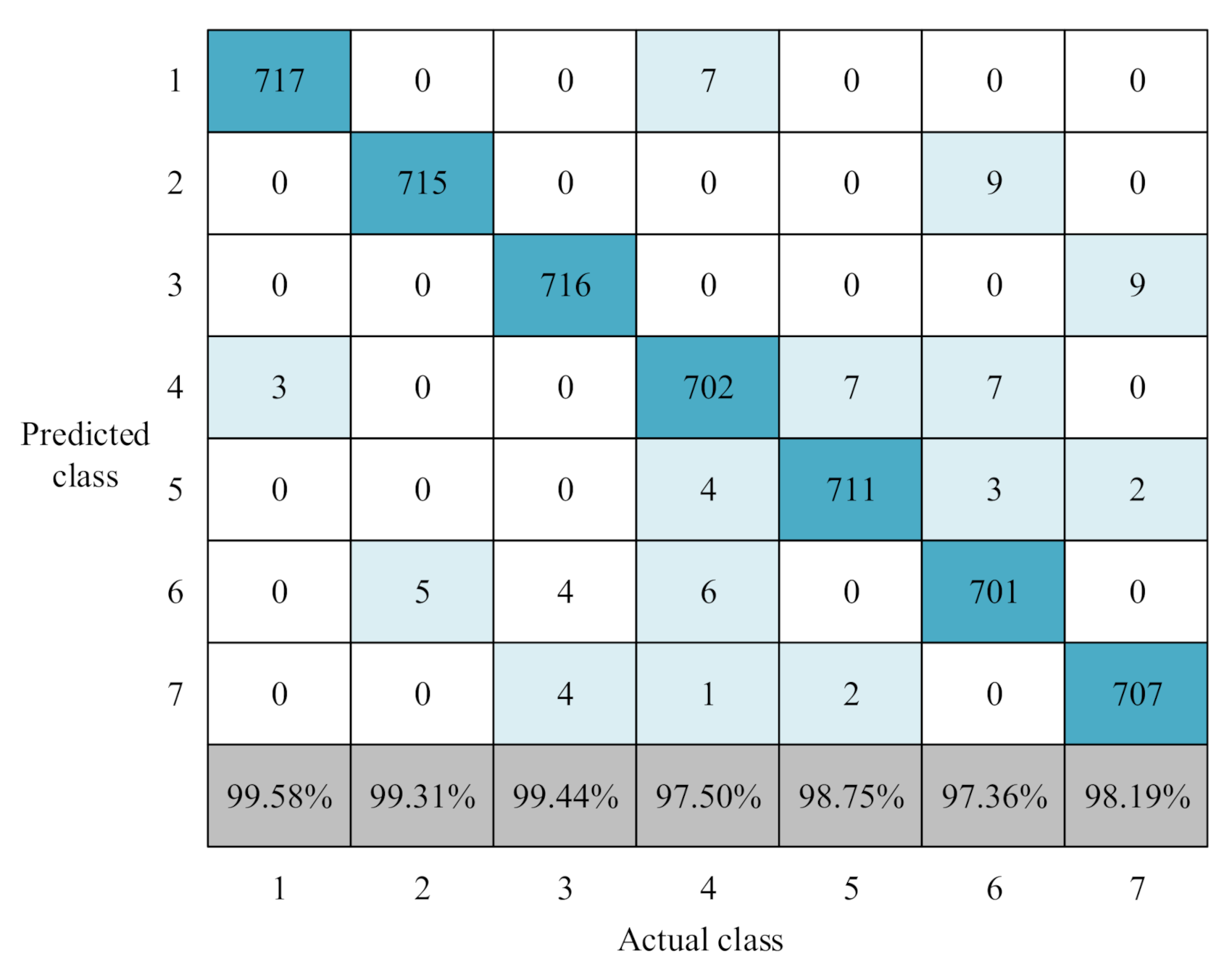
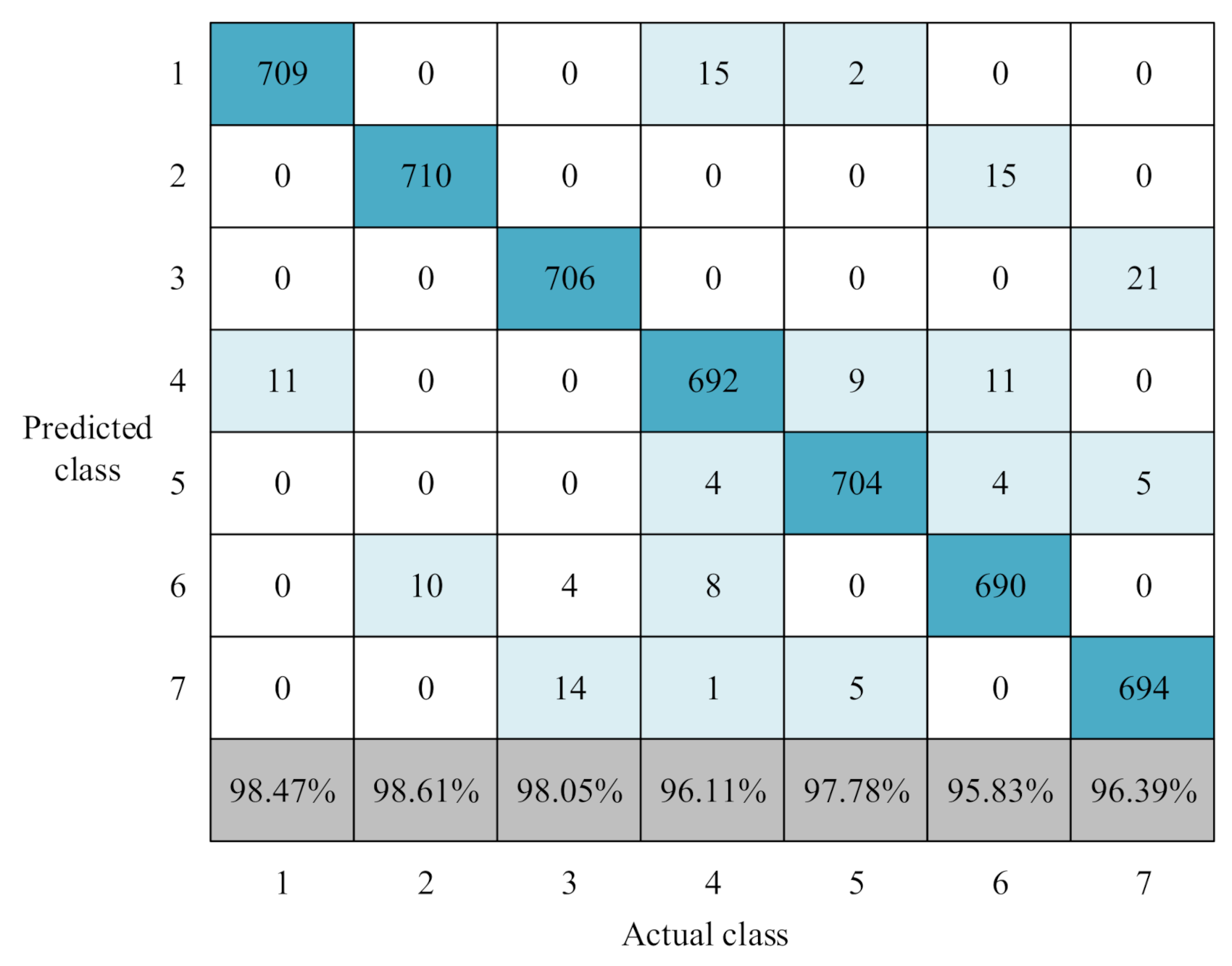
4.3. Simulation Result with the Ideal Data
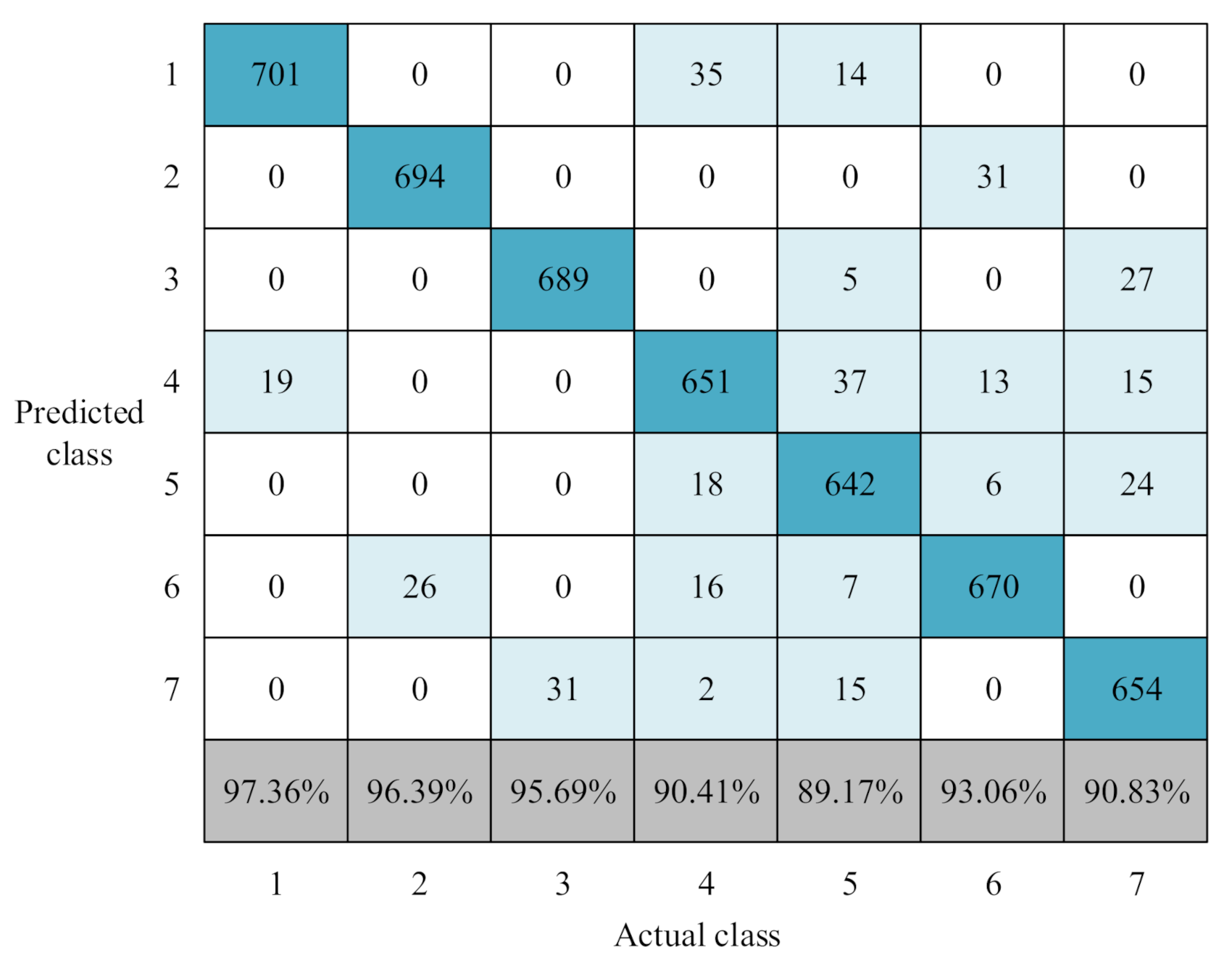
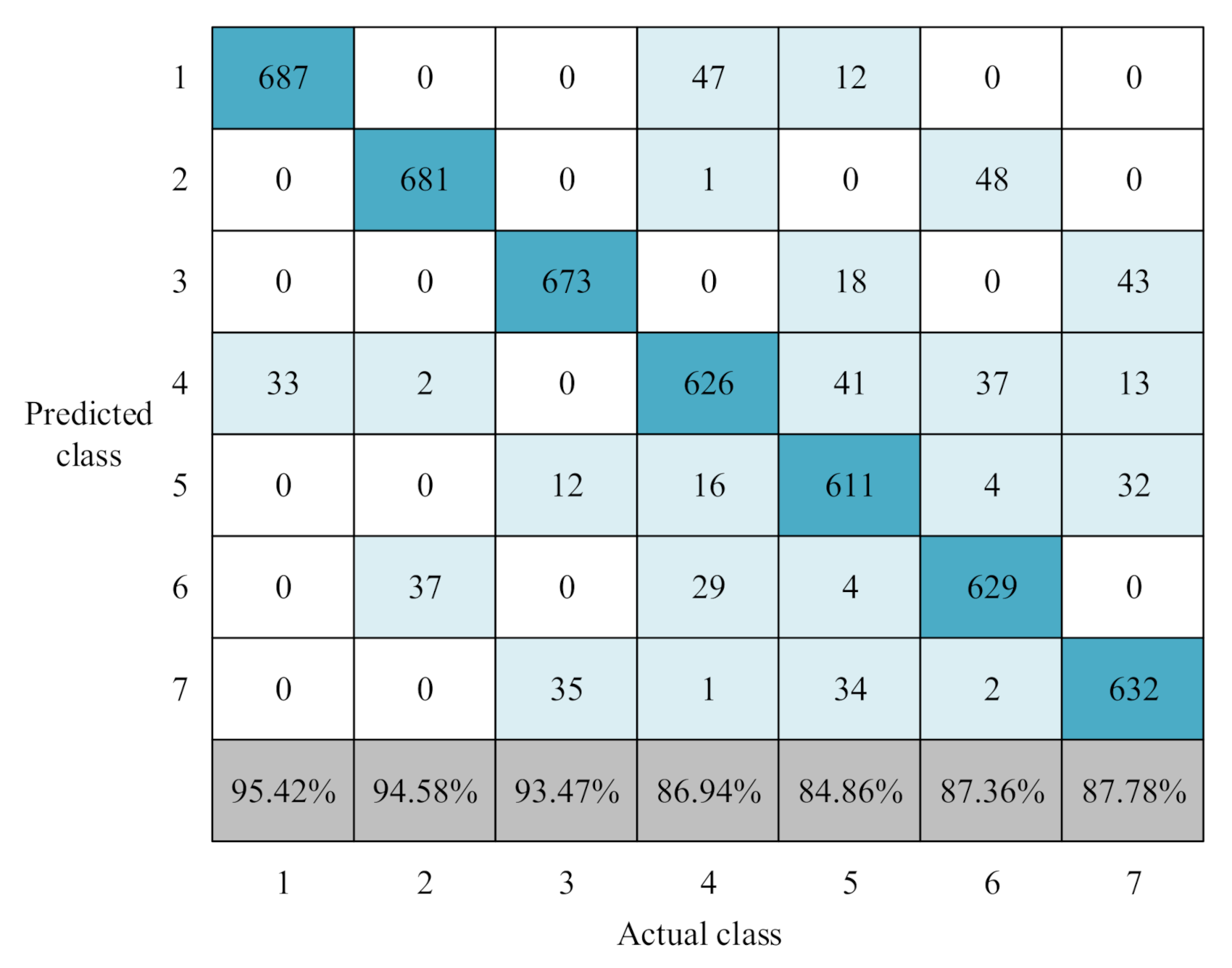
4.4. Simulation Result with the Noise Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Triki-Lahiani, A.; Abdelghani, A.B.B.; Slama-Belkhodja, I. Fault detection and monitoring systems for photovoltaic installations: A review. Renew. Sustain. Energy Rev. 2018, 82, 2680–2692. [Google Scholar] [CrossRef]
- National Energy Administration. Grid-Connected Operation of Photovoltaic Power Generation in 2019. 2020. Available online: http://www.nea.gov.cn/2020-02/28/c_138827923.htm (accessed on 28 February 2020).
- Green, M.A.; Emery, K.; Hishikawa, Y. Solar cell efficiency tables (version 46). Prog. Photovolt. 2015, 23, 805–812. [Google Scholar] [CrossRef]
- Spertino, F.; Chiodo, E.; Ciocia, A.; Malgaroli, G.; Ratclif, A. Maintenance Activity, Reliability, Availability, and Related Energy Losses in Ten Operating Photovoltaic Systems up to 1.8 MW. IEEE Trans. Ind. Appl. 2020, 57, 83–93. [Google Scholar] [CrossRef]
- Gonzalo, A.P.; Marugán, A.P.; Márquez, F.P.G. Survey of maintenance management for photovoltaic power systems. Renew. Sustain. Energy Rev. 2020, 134, 110347. [Google Scholar] [CrossRef]
- Villarini, M.; Cesarotti, V.; Alfonsi, L.; Introna, V. Optimization of photovoltaic maintenance plan by means of a FMEA approach based on real data. Energy Convers. Manag. 2017, 152, 1–12. [Google Scholar] [CrossRef]
- Daliento, S.; Chouder, A.; Guerriero, P. Monitoring, diagnosis, and power forecasting for photovoltaic fields: A review. Int. J. Photoenergy 2017, 54, 690–700. [Google Scholar] [CrossRef]
- Li, Y.; Ding, K.; Chen, F.; Ding, H. Fault diagnosis of photovoltaic array based on fast oversampling principal component analysis method. Power Syst. Technol. 2019, 43, 308–315. [Google Scholar]
- Wang, J.Y.; Qian, Z.; Zareipour, H.; Pei, Y.; Wang, J.-Y. Performance assessment of photovoltaic modules using improved threshold-based methods. Sol. Energy 2019, 190, 515–524. [Google Scholar] [CrossRef]
- Silvestre, S.; da Silva, M.A.; Chouder, A. New procedure for fault detection in grid connected PV systems based on the evaluation of current and voltage indicators. Energy Convers. Manag. 2014, 86, 241–249. [Google Scholar] [CrossRef]
- Dhimish, M.; Holmes, V.; Mehrdadi, B. Diagnostic method for photovoltaic systems based on six layer detection algorithm. Electr. Power Syst. Res. 2017, 151, 26–39. [Google Scholar] [CrossRef]
- Silvestre, S.; Chouder, A.; Karatepe, E. Automatic fault detection in grid connected PV systems. Sol. Energy 2013, 94, 119–127. [Google Scholar] [CrossRef]
- Spataru, S.; Sera, D.; Kerekes, T.; Teodorescu, R. Diagnostic method for photovoltaic systems based on light I–V measurements. Sol. Energy 2015, 119, 29–44. [Google Scholar] [CrossRef]
- Hachana, O.; Tina, G.M.; Hemsas, K.E. PV array fault DiagnosticTechnique for BIPV systems. Energy Build. 2016, 126, 263–274. [Google Scholar] [CrossRef]
- Hussain, M.; Dhimish, M.; Titarenko, S.; Mather, P. Artificial neural network based photovoltaic fault detection algorithm integrating two bi-directional input parameters. Renew. Energy 2020, 155, 1272–1292. [Google Scholar] [CrossRef]
- Chen, L.; Han, W.; Zhang, J. Fault diagnosis of photovoltaic modules based on data fusion. Power Syst. Technol. 2017, 41, 170–179. [Google Scholar]
- Harrou, F.; Dairi, A.; Taghezouit, B.; Sun, Y. An unsupervised monitoring procedure for detecting anomalies in photovoltaic systems using a one-class Support Vector Machine. Sol. Energy 2019, 179, 48–58. [Google Scholar] [CrossRef]
- Madeti, S.R.; Singh, S.N. Modeling of PV system based on experimental data for fault detection using kNN method. Sol. Energy 2018, 173, 139–151. [Google Scholar] [CrossRef]
- Chine, W.; Mellit, A.; Lughi, V. A novel fault diagnosis technique for photovoltaic systems based on artificial neural networks. Renew. Energy 2016, 90, 501–512. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, L.; Cheng, S. Intelligent fault diagnosis of photovoltaic arrays based on optimized kernel extreme learning machine and IV characteristics. Appl. Energy 2017, 204, 912–931. [Google Scholar] [CrossRef]
- Yang, L.; Cao, C.; Sun, J.; Zhang, L. Research on Improved Naive Bayes Algorithm in Spam Filtering. J. Commun. 2017, 38, 140–148. [Google Scholar]
- Di, P.; Duan, L. A new Naive Bayesian text classification algorithm. Data Collect. Process. 2014, 29, 71–75. [Google Scholar]
- El Hindi, K. Fine tuning the Naïve Bayesian learning algorithm. AI Commun. 2014, 27, 133–141. [Google Scholar] [CrossRef]
- Diab, D.M.; El Hindi, K.M. Using differential evolution for fine tuning naïve Bayesian classifiers and its application for text classification. Appl. Soft Comput. 2017, 54, 183–199. [Google Scholar] [CrossRef]
- Belkaid, A.; Colak, I.; Isik, O. Photovoltaic maximum power point tracking under fast varying of solar radiation. Appl. Energy 2016, 179, 523–530. [Google Scholar] [CrossRef]
- Zhao, Y.; Ball, R.; Mosesian, J.; Lehman, B. Graph-based semi-supervised learning for fault detection and classification in solar photovoltaic arrays. IEEE Trans. Power Electron. 2014, 30, 2848–2858. [Google Scholar] [CrossRef]
- Mellit, A.; Tina, G.M.; Kalogirou, S.A. Fault detection and diagnosis methods for photovoltaic systems: A review. Renew. Sustain. Energy Rev. 2018, 91, 1–17. [Google Scholar] [CrossRef]
- Fazai, R.; Abodayeh, K.; Mansouri, M. Machine learning-based statistical testing hypothesis for fault detection in photovoltaic systems. Sol. Energy 2019, 190, 405–413. [Google Scholar] [CrossRef]
- Appiah, A.Y.; Zhang, X.; Ayawli, B.B.K.; Kyeremeh, F. Long short-term memory networks based automatic feature extraction for photovoltaic array fault diagnosis. IEEE Access 2019, 7, 30089–30101. [Google Scholar] [CrossRef]
- Garoudja, E.; Chouder, A.; Kara, K.; Silvestre, S. An enhanced machine learning based approach for failures detection and diagnosis of PV systems. Energy Convers. Manag. 2017, 151, 496–513. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, W.; Yin, D.; Zhang, K.; Zhang, X.; Zheng, J. Fault Detection and Diagnosis Method of Distributed Photovoltaic Array Based on Fine-Tuning Naive Bayesian Model. Energies 2021, 14, 4140. https://0-doi-org.brum.beds.ac.uk/10.3390/en14144140
He W, Yin D, Zhang K, Zhang X, Zheng J. Fault Detection and Diagnosis Method of Distributed Photovoltaic Array Based on Fine-Tuning Naive Bayesian Model. Energies. 2021; 14(14):4140. https://0-doi-org.brum.beds.ac.uk/10.3390/en14144140
Chicago/Turabian StyleHe, Weiguo, Deyang Yin, Kaifeng Zhang, Xiangwen Zhang, and Jianyong Zheng. 2021. "Fault Detection and Diagnosis Method of Distributed Photovoltaic Array Based on Fine-Tuning Naive Bayesian Model" Energies 14, no. 14: 4140. https://0-doi-org.brum.beds.ac.uk/10.3390/en14144140