1. Introduction
Modern submarines are complex types of machines that exist today, revolutionizing the marines and with the presence of multi phase motors witnessing burst in their daily performance, intended for underwater research, maintenance, or military purposes. The intentions of military submarines are attacking enemy surface ships or submarines and also serving as portable missile launchers, and their subtle nature makes them suitable for surveillance and the deployment of special forces in enemy territory, and so forth. All these make submarines very popular for the military power of developed countries [
1]. A six phase induction machine is a dual stator winding induction motor with two sets of three phase currents and is visualized as a dual stator winding induction motor, as with paralleling two three phase induction motors. A single dual stator winding induction motor can replace the two three phases and cost is decreased while reliability is enhanced [
2].
Different types of AC motor are used for electric propulsion. In this research, a six-phase squirrel cage induction motor has been proposed because of design simplicity, robustness and is less expensive than a similarly rated Permanent Magnet Synchronous Motor. The six-phase squirrel cage induction motor is approximately 15% less expensive than the Six Phase Permanent Magnet Synchronous Motor. They are the most applicable electric machines to industry, transportation system and other applications due to their higher torque and low maintenance compared to other rotating electrical machines. These advantages contribute to their reliability and make them attractive for electric propulsion applications. Three phase induction motors have been used for transportation and industrial application even though they have a setback with respect to performance especially in the case of phase loss [
3,
4]. A major problem referring to the machine model is the limitation to three-phase losses [
5]. In the case of a three phase induction motor, phase loss happens, the motor does not produce an adequate performance such as output power and torque, as is required for electric propulsion applications and hazardous environments such as mining, pumping and blowing operations [
6,
7]. To reduce the phase loss problem, the six phase induction motor gained more attention due to its simplicity in converting the three phase to six phase [
8]. The six phase induction motor has a three phase induction motor that has dual stator winding shifted by 30 electrical degrees. This is the solution to the three phase induction motor phase loss problem [
9]. The system reliability improves when the six phase induction motor is used. As a result, the harmonic current in the rotor is also minimized. The six phase induction motor is used for traction applications and is employed in electric propulsion systems (ships and aircraft) [
10]. Due to the high degree of reliability, demands in electric aircrafts, electric submarines propulsion, electric vehicles, and so forth are the application area of multiphase induction motors [
11]. Due to the ease of operation, high reliability, cost effectiveness, easy maintenance and low noise compared to other motors, six phase induction motors are widely applied in industries in recent years [
12].
The Genetic Algorithm (GA) has been used to optimize the design of electrical machines. During optimization, GA undertakes design variable selection, crossover, and mutation. The advantage of GA over traditional nonlinear programming techniques is that it can find the global minimum than the local minimum [
13]. Induction motor (IM) design difficulties are also solved by GA. However, these strategies do not always yield the globally optimal solution; in some cases, they may provide poor results. One of the modern evolutionary algorithms is the PSO algorithm. PSO is a population based method that is conceptually straightforward to implement, and highly efficient. PSO is an optimization technique that can be utilized to solve many of the same problems as GA while avoiding some of GA’s drawbacks. Particle Swarm Optimization has also been demonstrated to be reliable in the case of non linearity and high dimensional challenges [
14]. Nowadays, the optimum design of six phase induction motors has gained greater attention [
15]. This research paper presented a novel method of multi objective design and the optimization of six phase induction motors. The proposed method is more efficient than the traditional design method because of high performance and reliability. The particle swarm optimization (PSO) algorithm has been compared to manual design in this research paper with the main goal of finding which is more suitable for the design of six phase induction motors. The research presents an optimal design of six phase induction motors for obtaining optimal size and efficiency. For this purpose, PSO is applied and it has not been used for the optimum design of such motors yet. Optimization is performed with an objective function, which is a combination of maximum efficiency and minimum size. This approach is used to design a six-phase IM, and the results were compared to the GA and the traditional design method.
2. Proposed System Design
The tools that we used for these studies were Ansys Motor-CAD and MATLAB Software. Ansys Motor-CAD was used to evaluate motor topologies and concepts across the full operating range [
16,
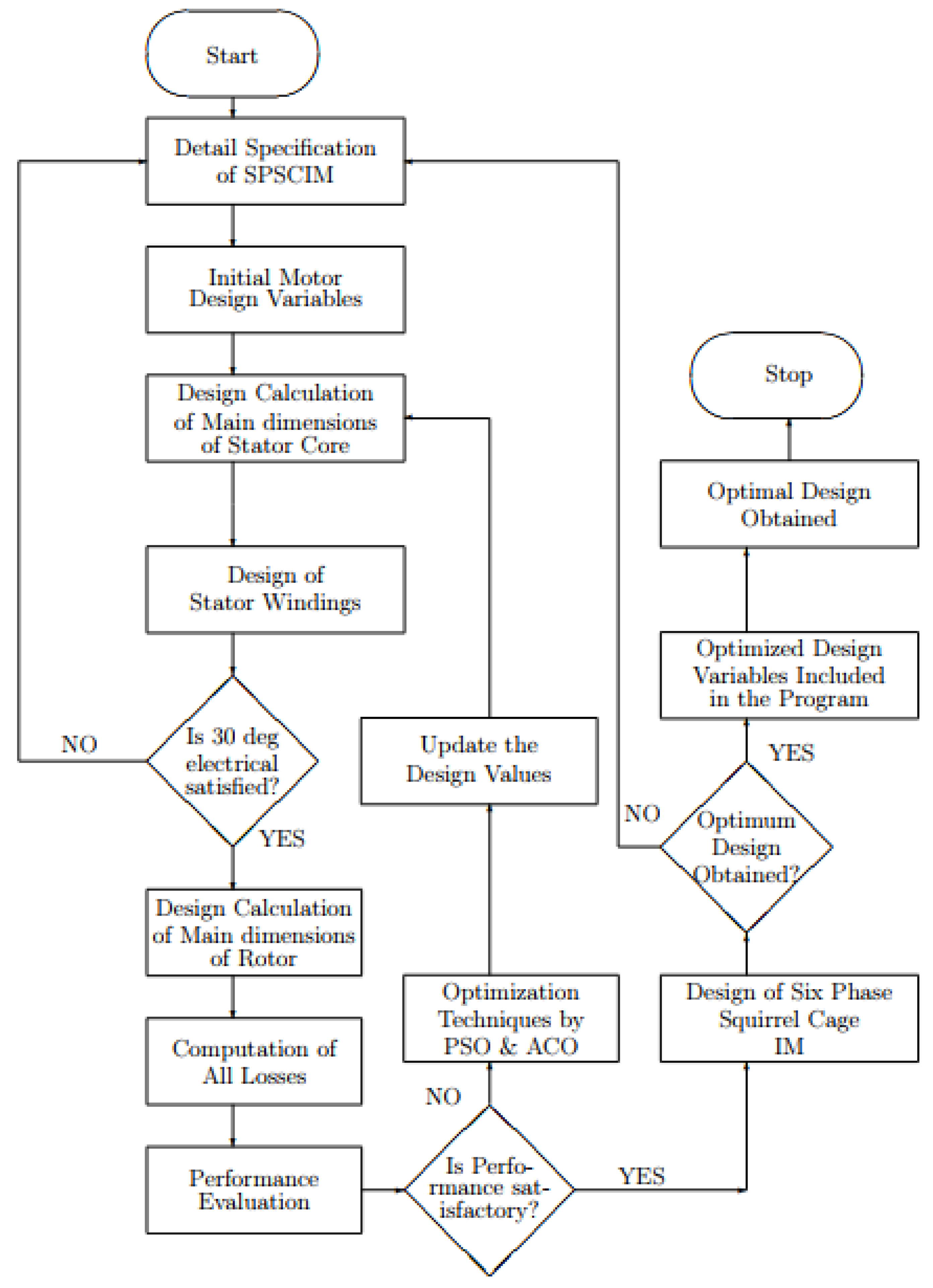
17]. MATLAB software was used throughout the whole code development process, such as writing, compiling, debugging, and programming for the Genetic Algorithm and the PSO algorithm. The MATLAB program for the PSO application is written and executed. In terms of the given design variables to be optimized, this software minimizes stator copper loss, rotor copper loss, and stator iron loss. The efficiency, weight and power factors have been optimized, and the optimized values have been put into the main program for the best design possible. As a result, the parameters of a six phase induction motor have been assessed, and the values have been verified. The total losses in the stator and rotor are used as objective functions to be minimized since the design optimization of a six-phase induction motor requires objective functions affecting performance aspects. The PSO optimized six-phase induction motor design process is depicted in
Figure 1, which includes current density, flux density, magnetic and electric loading; aspect ratio and other factors are chosen based on the motor’s detailed specifications. The design is prepared with the assumption of efficiency and power factor. The acquired result is examined to see if the assumptions are correct. If this is not the case, the process is repeated.
One of the most essential parts of electrical machine design is optimizing optimization. The problem of optimizing six phase induction motor design is represented mathematically as a non-linear programming. The total power loss equation is minimized to obtain optimal efficiency [
18]. The Particle Swarm Optimization method is made up of a group of particles that move throughout the search space based on their own best previous position as well as the best past location of the entire swarm or a near neighbor [
19]. Similar to the genetic algorithm and the evolution algorithm, PSO is also a computation technique inspired by a flock of birds or a school of fish. In this case, the particle (bird or fish) searches for its neighbors, comparing itself to other populations and follows the superior neighbors [
20].
The velocity of a particle is adjusted in each iteration by:
where
is the
ith particle velocity,
and
are personal best and global best weighting coefficients, respectively,
is the
ith particle’s position at time
t,
is the
ith particle’s best known position, and
is the best position known to the swarm. A particle’s position is updated using:
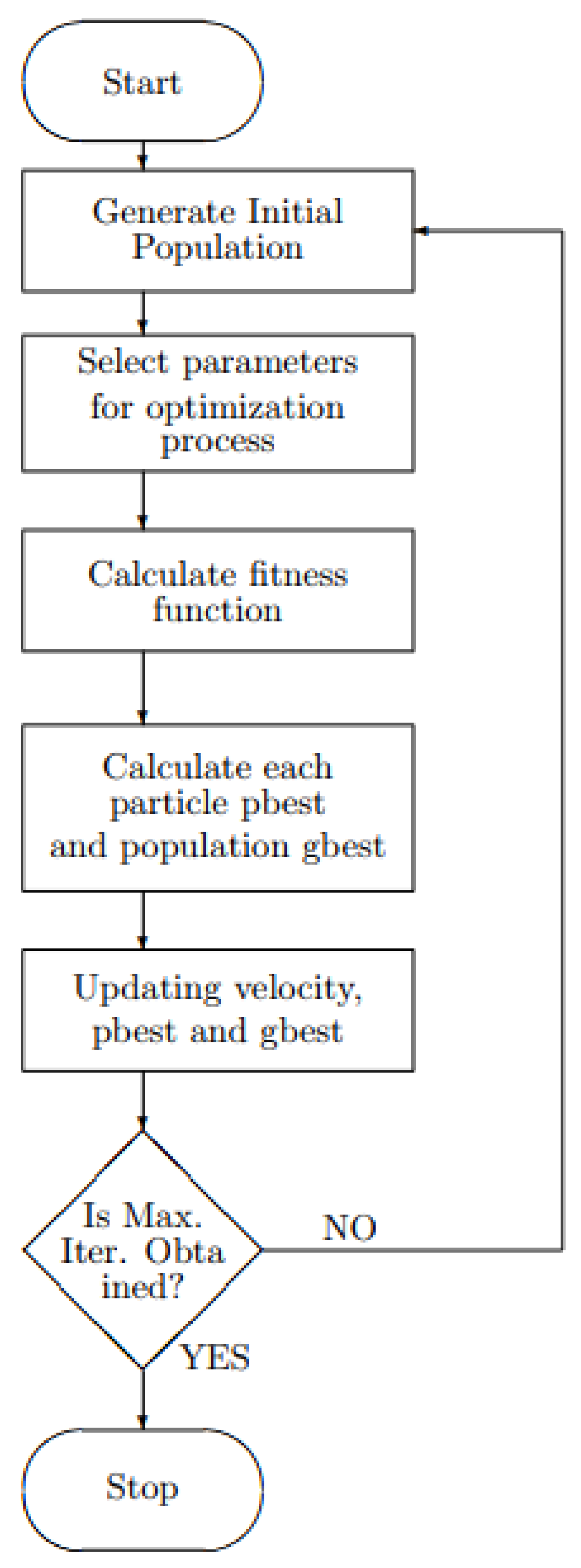
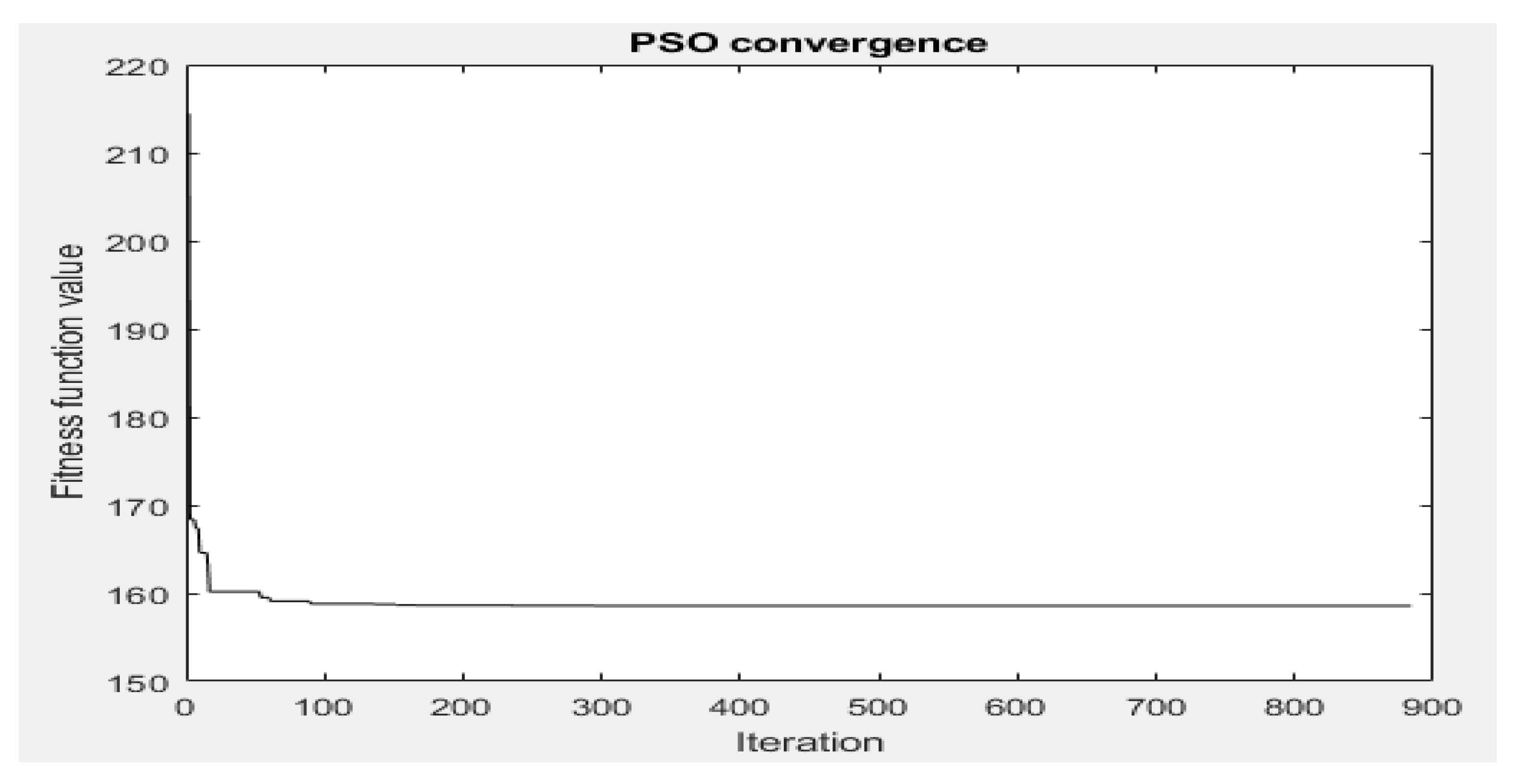
Figure 2 shows a particle swarm optimization algorithm flowchart.
A standard PSO suffers a convergence prematurely and is easily trapped at a local optimum due to loss of population diversity. To avoid this problem, a balance between global and local search abilities can be taken into consideration and inertial weight PSO was proposed. The velocity of a inertial weight PSO is updated in each iteration by:
Still, when inertial weight is small, the algorithm comes back to the problem of exploitation at the local optimum for gbest and pbest. To deal with premature convergence, a Self Regulated PSO is proposed which provides a better exploitation and exploration to the standard PSO. In this self regulated PSO, the best particle will have the higher acceleration process by making an increased initial weight. Velocity is updated as follows:
where
is the
ith particle inertial weight,
is self cognition perception and
is social cognition perception;
and
are zero for best particle and one for non best particle. Generally, particle swarm optimization is used to optimize the loss of the induction motor through writing Matlab code on Matlab software by using an objective function and derived total power loss of the motor.
2.1. Optimization Function Problem Formulation
The key to optimizing the six-phase induction motor design is to select independent variables; otherwise optimization is complicated if many variables are used. As a result, variable selection is critical for optimizing motor designs. The following is a mathematical representation of a general nonlinear programming problem.
Find such that is a minimum or maximum, ≤ 0, i = 1, 2, ..., n; ’s are objective function to be minimized or maximized and are constants and ’s are the variables.
Finally, the total power equation is derived and then the derived equation was converted into the MATLAB program. Then by using PSO and GA algorithms, the derived equation was programmed and the program was executed on the MATLAB software. Then, simulation of the model was performed by using ANSYS Motor-CAD and the simulation result was verified.
2.2. Derivation of Objective Function
The six phase IM losses were used as an objective function. There are two main losses considered in the six-phase induction motor. These are Copper Loss (Stator Copper Loss and Rotor Copper Loss) and Stator Iron Loss. The major losses that are found in the parts of induction motor are iron losses. The two types of iron losses are hysteresis and eddy current losses. The copper loss occurs due to the current flowing through the winding resistance of the motor. So these losses can be minimized by reducing resistance of winding, increasing the conductor’s cross sectional area, lowering the temperature of winding and using lower resistivity materials Author1 [
21].
Most of the time, extra losses can be reduced by using copper conductor materials with increased current densities. The causes of hysteresis loss are related to electrical frequency and that of eddy current loss is related to the square of the electrical frequency. The performances of six phase induction motors are affected by stator and rotor losses. To apply the PSO, the first objective function is defined to evaluate six phase squirrel cage IM design to obtain an overall good performance. The first objective function aims to minimize the total losses. Let us derive its mathematical equation with each loss for clarity.
2.2.1. Stator Copper Loss
Stator Copper Loss (
) is determined as follows
However, the resistance is given by:
In addition, rewriting the resistance formula for stator copper winding, we have:
Current density is given as follows:
Substituting Equation (
9) into Equation (
8), we have:
Now, substituting Equation (
10) into Equation (
6), we have the following:
By simplifying Equation (
11) we have:
2.2.2. Rotor Copper Loss
Rotor Copper Loss () is the sum of the rotor bar loss and the rotor end ring loss.
= Rotor bar loss (
) + End ring loss (
) Rotor bar loss (
) is found as follows
Substituting Equation (
15) into Equation (
14), we have:
Now substituting Equation (
16) into Equation (
13), we have the following:
By simplifying Equation (
17) we have:
End ring loss (
) can be determined as follows:
However,
where
= mean length of current path in the end ring = circumference of end ring.
Substituting Equations (
20) and (
21) into Equation (
19) we have the following equation:
Substituting Equation (
23) into Equation (
22), we have:
Therefore, rotor copper loss becomes:
Now, total copper loss is found by adding all copper losses.
Equation (
29) shows six phase induction motor copper losses.
2.2.3. Stator Iron Loss
Stator iron loss (
) can be determined as follows:
where
= Volume of teeth;
= Volume of core.
However, we have the following relationship:
By rearranging Equation (
33), we have the following:
Now substituting Equation (
34) into Equation (
32), we have:
By squaring the terms inside the brackets and simplifying Equation (
35), we obtain
Substituting Equation (
33) into Equation (
39), we have:
Finally substituting Equations (
31) and (
40) into the expression of stator iron loss in Equation (
30), we have:
Therefore, total losses of the six-phase induction motor are determined as follows: (
P) = Total Copper Loss (
) + Total Iron Loss (
)
2.3. Weight Determination
To apply the particle swarm optimization technique, a weight objective function has to be defined to evaluate how good each motor design is, especially related to weight. The objective functions are related to weight minimization. The mathematical expression of the weight of material, of the six phase squirrel cage induction motor is similar to that of a 3P induction motor in their form except their weight may differ because the stator winding is different. The weight of iron used for stator diameter is determined as follows:
where
= weight of iron of stator diameter,
= Iron Resistivity,
L = Stator Length,
= Stator Diameter,
= Stator Core Diameter.
The weight of iron used for stator bore diameter is determined as follows.
where
= weight of iron of stator bore diameter and
D = the bore diameter of stator,
The weight of iron used for stator teeth is determined as follows:
where
= weight of iron of stator teeth,
= number of stator slot,
= width of stator teeth and
= diameter of rotor slot.
The weight of iron used for rotor teeth is determined as follows:
where
= weight of iron of rotor teeth,
= number of rotor slot,
= width of rotor teeth and
= diameter of rotor slot.
Total iron weight Wit is determined by the following formula:
The copper weight includes stator winding weight, weights of rotor bars and two end-rings. The weight of copper used for stator winding is determined as follows:
where
= weight of stator winding copper,
= the resistivity of copper,
= number of turns per slot per phase,
= mean turn length and
= the area of stator winding of stator.
The weight of copper used for rotor bars is determined as follows:
where
= weight of rotor bar copper,
= number of rotor slot,
= Rotor bar cross sectional area and
= Rotor bar length.
The weight of copper used for two end rings are determined as follows:
where
= weight of end rotor copper,
= area of end ring of rotor and
= Rotor end-ring diameter.
The total weight of copper materials
used is determined as follows:
Therefore total iron and copper weight material
is obtained as follows:
2.4. ANSYS Motor CAD
Then the software was launched and the information about the motor to be designed was entered. Manual modeling was used to determine the value of those data. The software created a model of the stator core, stator slot, stator winding, rotor core, rotor slot, and the model when the rotor was inserted in the stator using the input parameters. In the following diagrams, those models are described one by one.
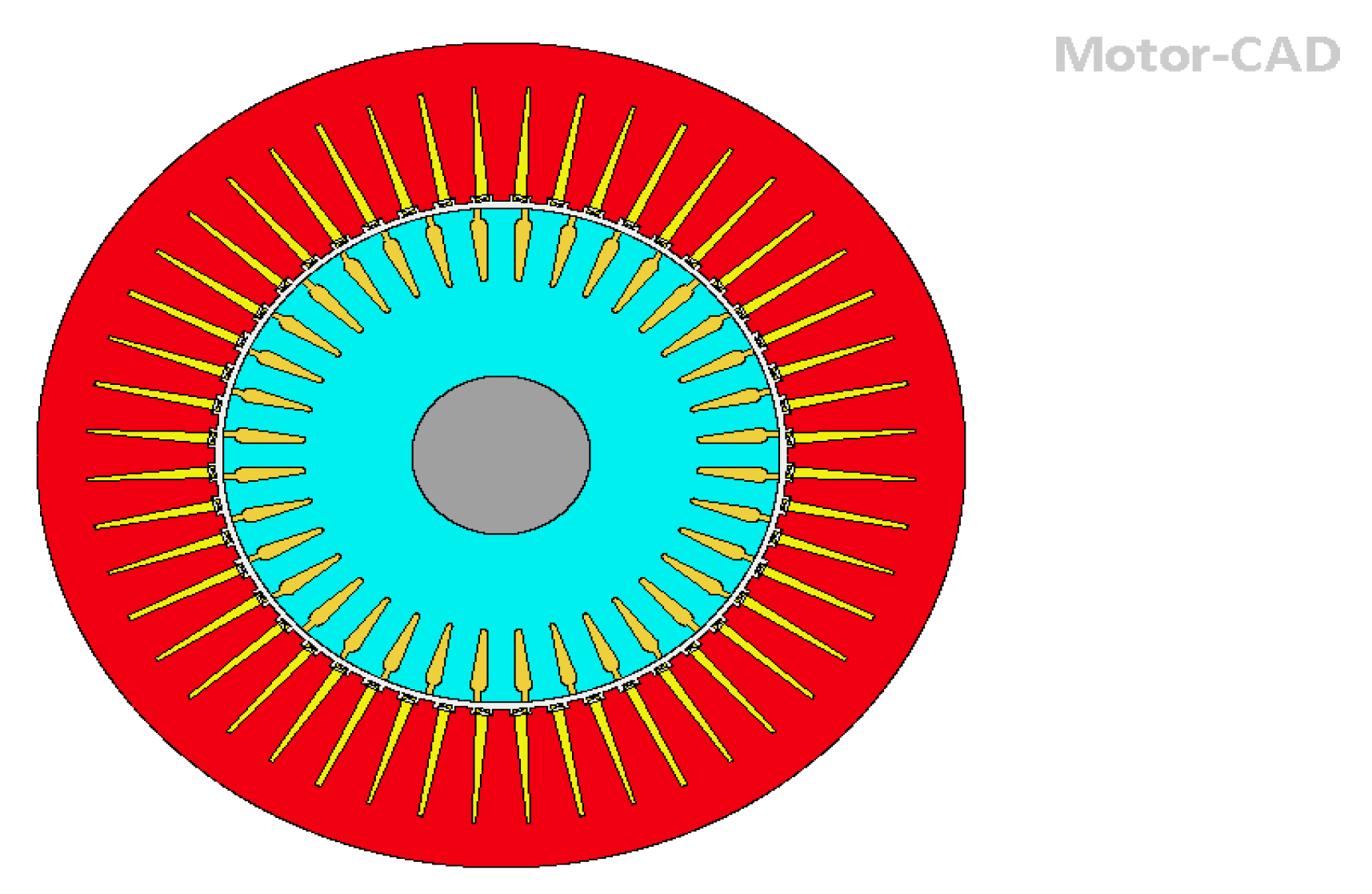
Figure 3 shows a representation of the stator core and rotor core. The stator core is the outer stationary portion of an induction motor. M19 29 Gauge steel material was used to model this stator core, which has minimal core loss, excellent permeability at low and moderate inductions, and outstanding stamping properties. The rotor core is built of the same steel as the stator core [
22]. It has thirty-eight slots that are ready for rotor bar casting. When the rotor core was put into the stator core with a sufficient air gap between them, as shown below. First, a machine model was created. This machine’s data were known from previous calculations, and the model’s outputs could be compared to validate it.
The model of one of the stator slots is illustrated in
Figure 3, along with its dimensions and shape. One of the most important elements affecting motor performance is the slot design and dimension. As a result, the optimal value of motor performance is obtained by carefully selecting the slot’s shape and dimensions.
When the stator core mode, stator slot model, stator winding, rotor core, rotor slot, and shaft are joined together, it contains the entire model. The design data sheet for 30 hp is seen in
Table 1 [
23]. At the completion of the design process, this design sheet lists the data needed for design and material conceptualization. It is separated into three categories: general data, stator data, and rotor data. The general data for the design of the six-phase induction motor are given in the
Table 2. The stator and rotor models were obtained using software from the stator and rotor parameters.
2.4.1. Equivalent
Circuit from Motor CAD Design
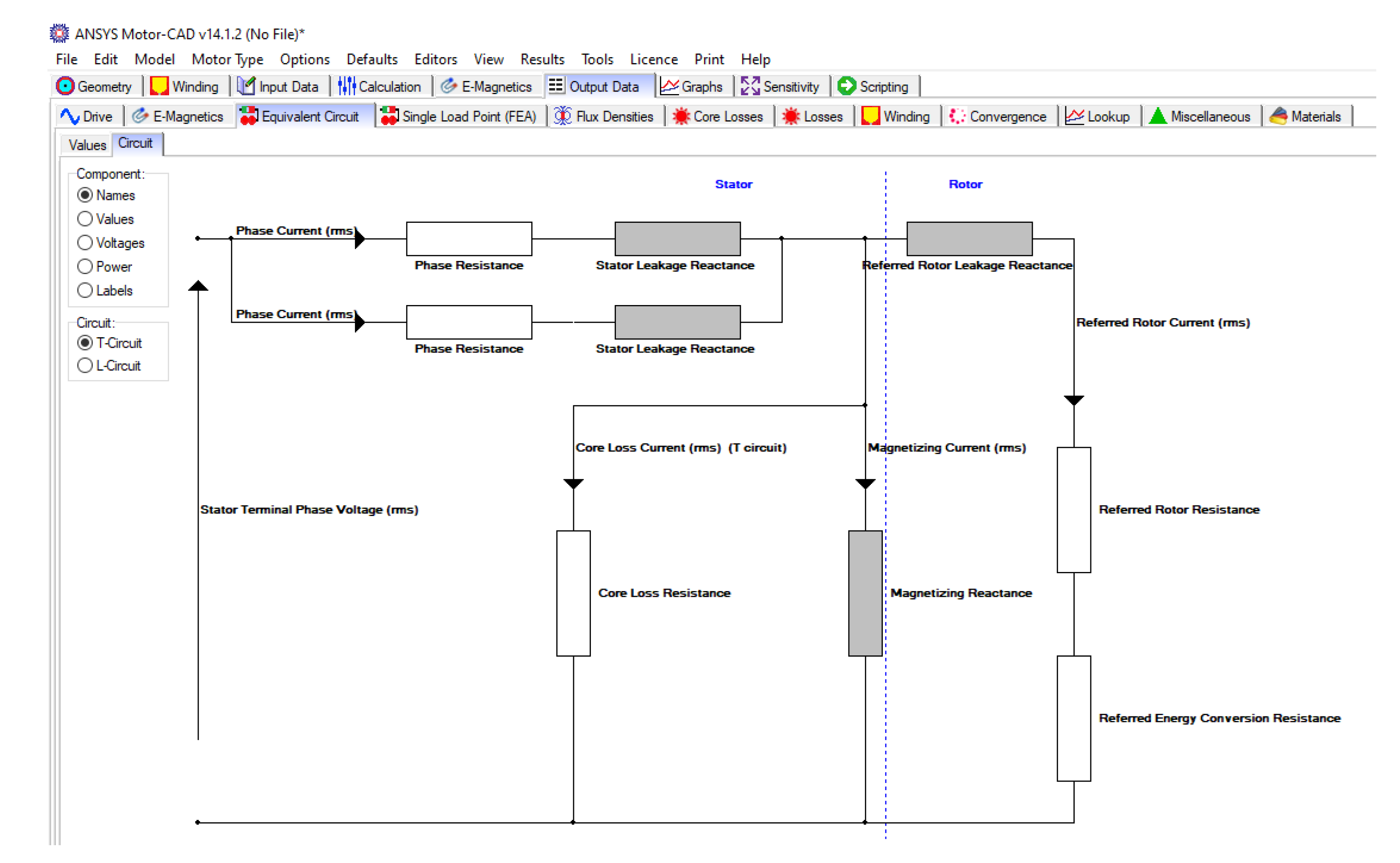
Figure 4 shows the equivalent circuit model of the designed motor using Ansys Motor CAD software.
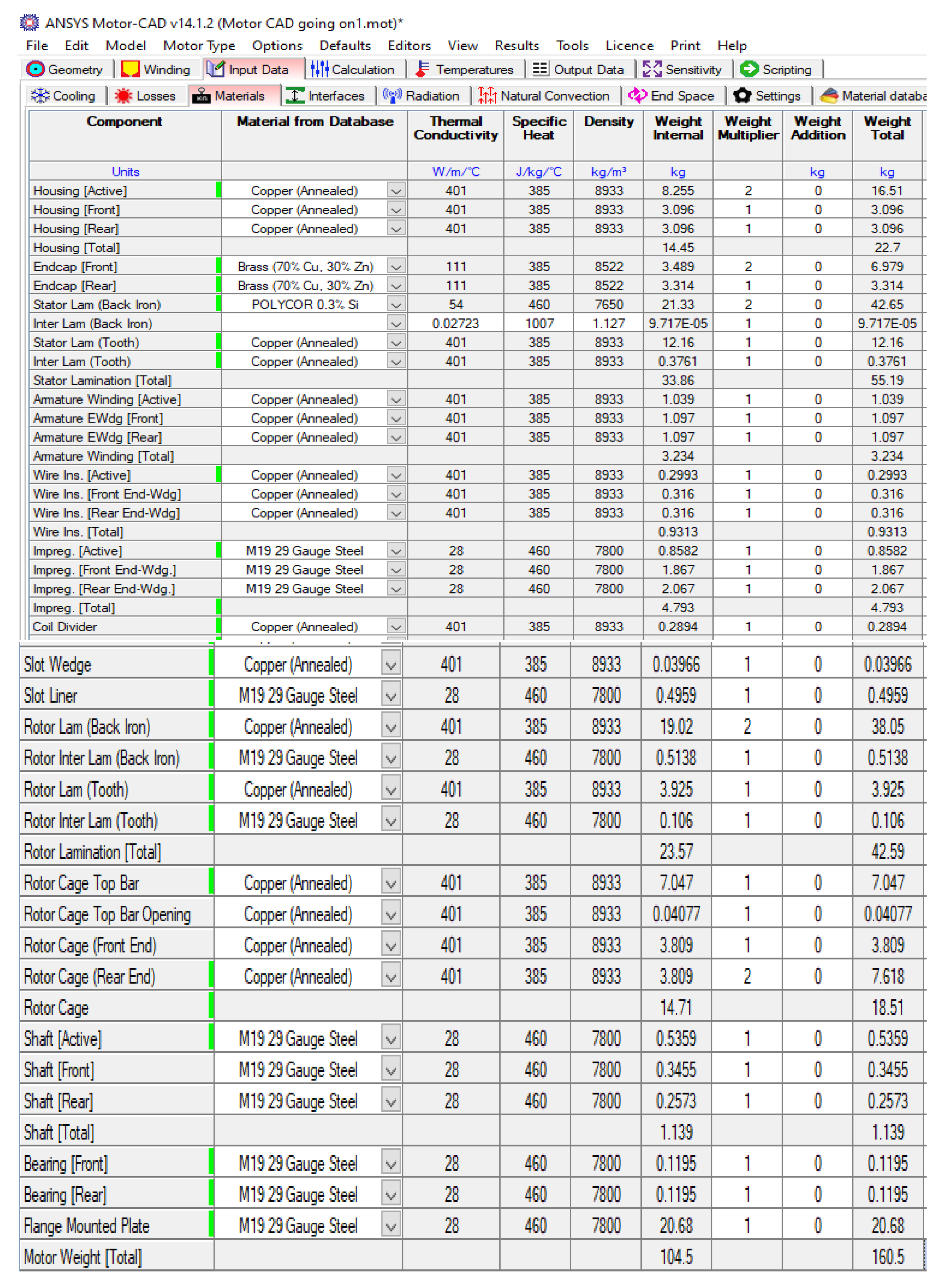
2.4.2. Material Consumptions
Figure 5 shows material consumption for a software simulation of a developed six phase induction motor.
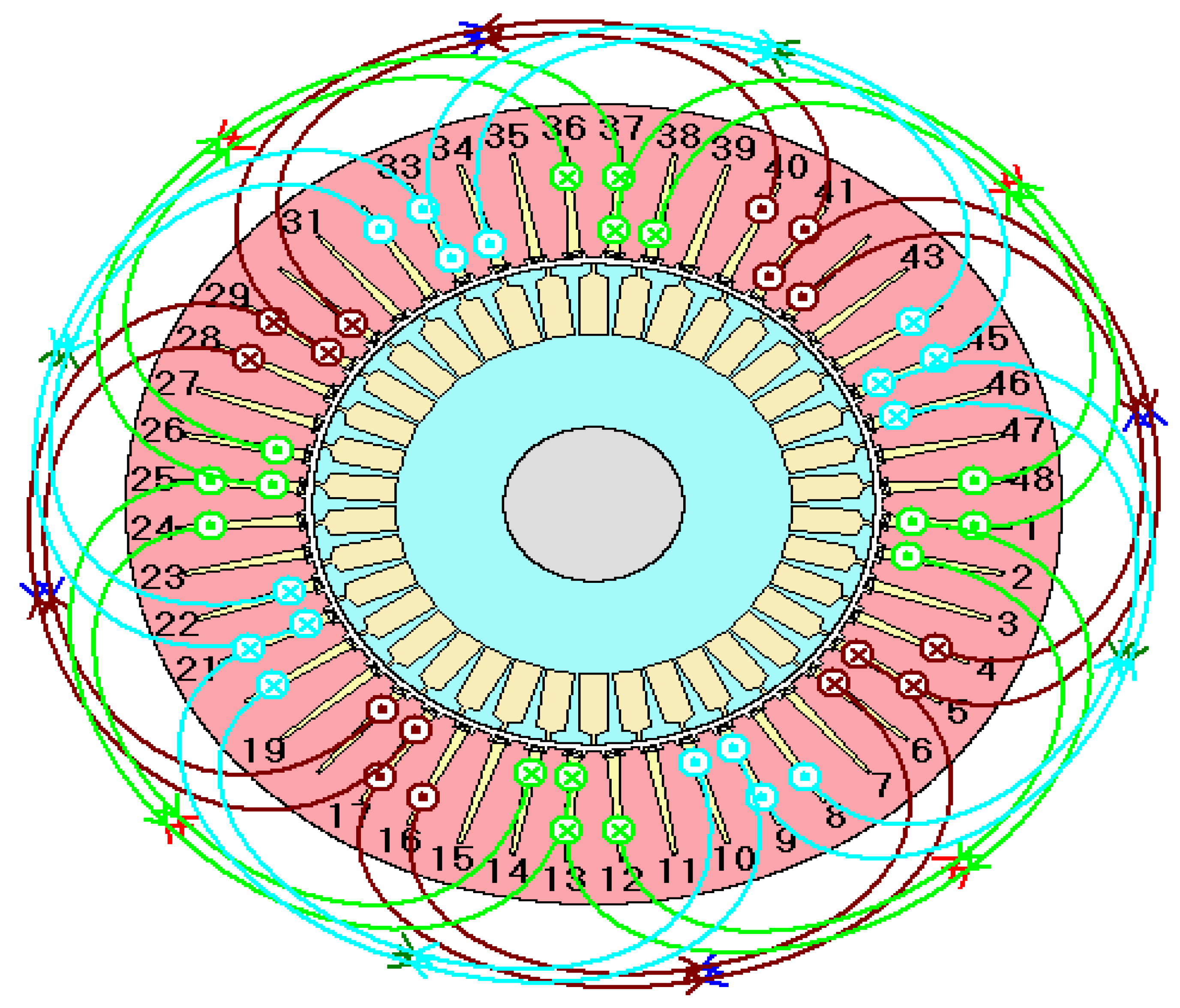
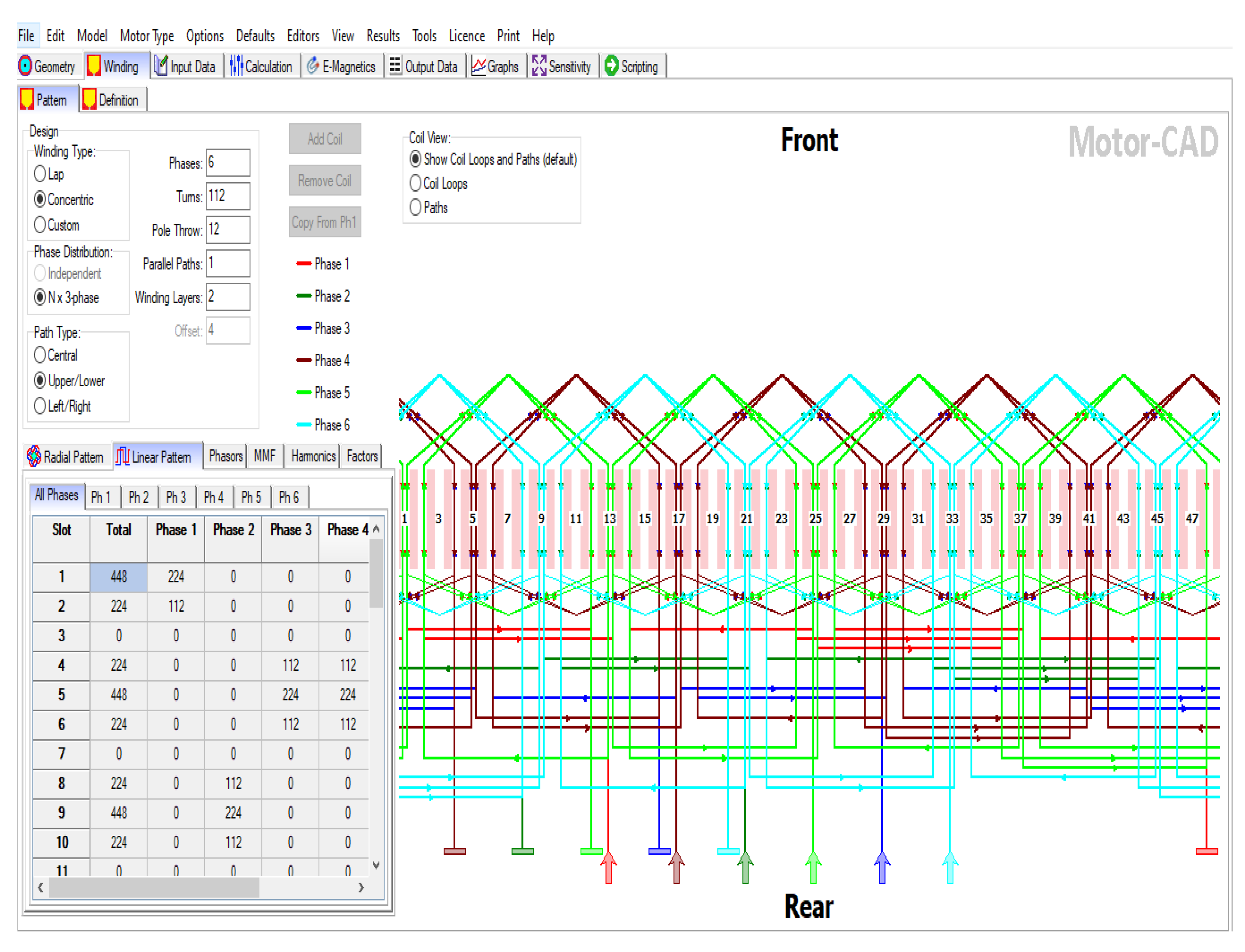
2.4.3. Winding Pattern
Figure 6 and
Figure 7 show the radial pattern and linear pattern winding layouts of the designed six phase induction motor. The radial representation of the cross sectional geometry of the designed induction motor of four poles and 48 slots is plotted by using Ansys Motor-CAD. The main parameters used for this plot are summarized in
Table 1. Each conductor in this motor is made up of two strands. The winding of the machine is separated into two parallel paths as can be seen in the figure below. The windings are connected in a star pattern.
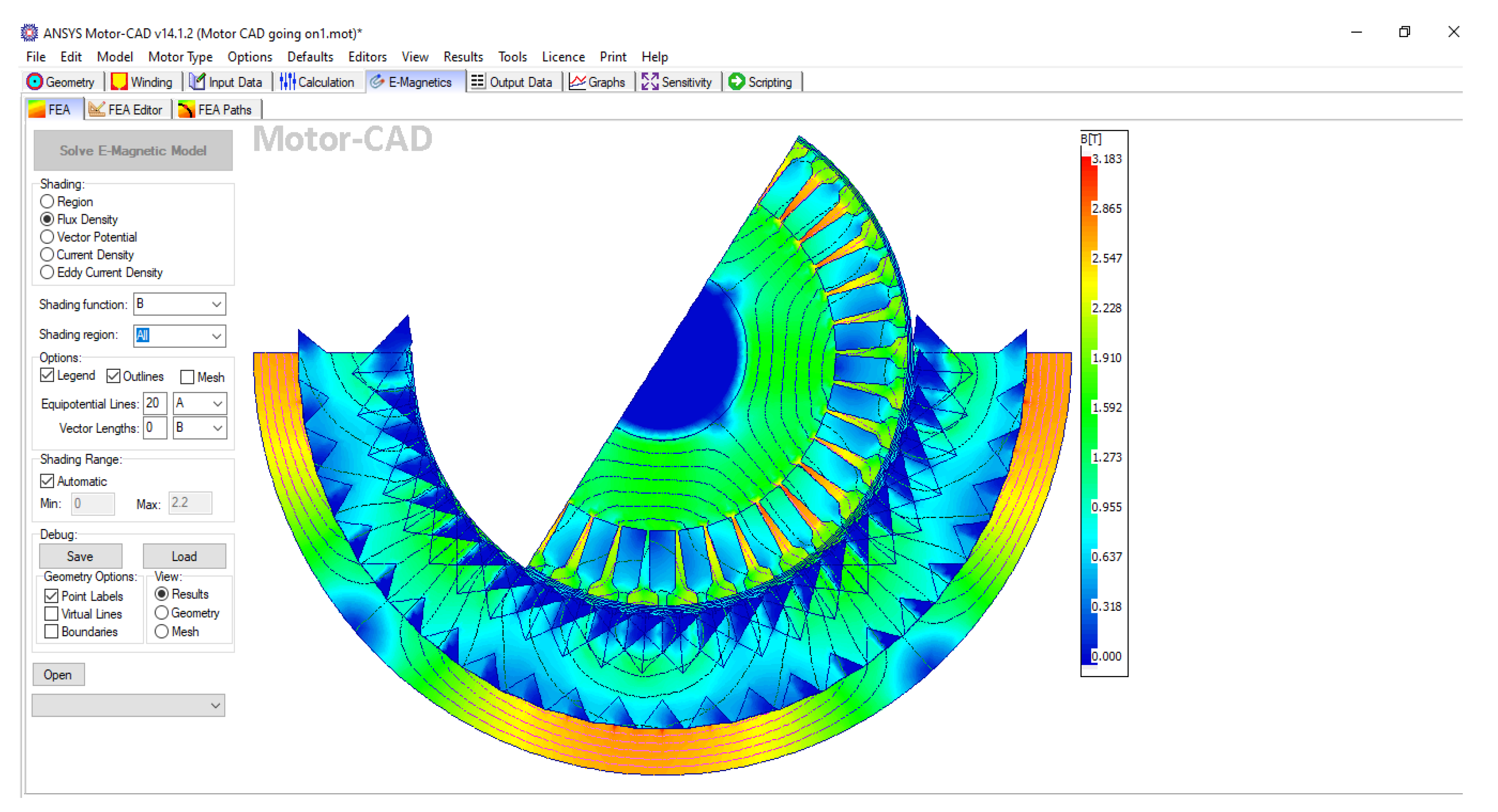
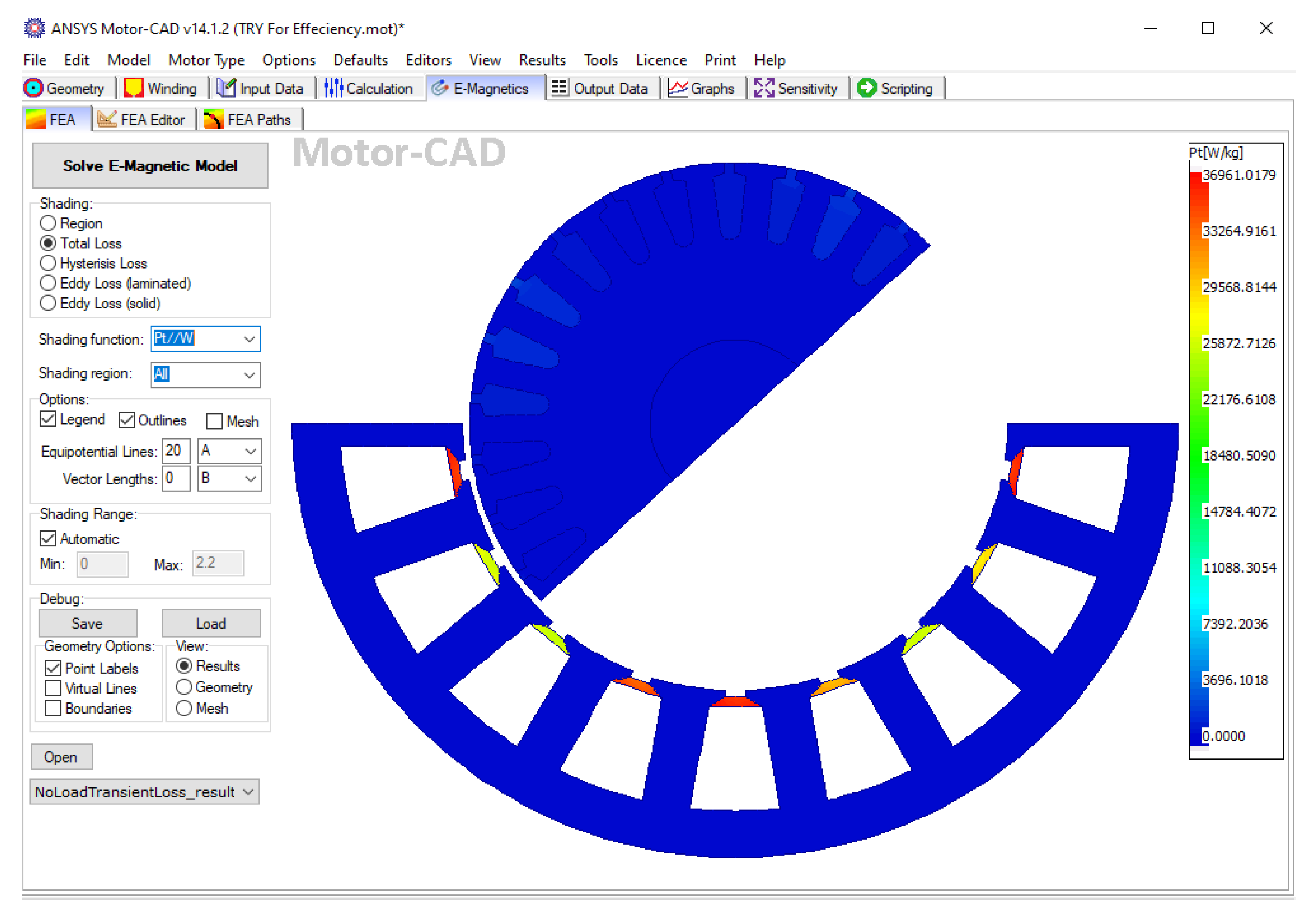
2.4.4. Flux Density
Figure 8 shows a plot of flux density in the stator and rotor of the modeled six phase IM at a rated speed. As shown in
Figure 8 at the left of the figure, flux is symbolized by B, which is measured by Tesla (T). We can read the value of this flux by checking the color of the flux density in the figure and searching for the corresponding number given within that color.
2.5. Stability Analysis
Stability analysis is best performed by determining the system eigenvalue using the characteristic equation as:
Only if all of the real components of the eigenvalues are negative is a system considered to be stable. For the six-phase induction motor, the above stated formula produces seven state variables, which include both real and complex values. The six-phase induction motor has three complex complex conjugate pairs and one real eigenvalue is obtained. A 4-pole, 415 V, 50 Hz, a six phase induction motor is simulated [
24]. Using MATLAB, the following eigenvalues are obtained. So according to the stability criteria of eigenvalues, real components of the eigenvalues are negative as shown below. −1:1176 + 0:0000
i −0:1218 + 1:8114
i −0:1218 − 1:8114
i −0:4314 + 0:6471
i −0:4314 − 0:6471
i −0:0779 + 1:1749
i −0:0779 − 1:1749
i. This shows that the system is stable.
2.5.1. Parameters Used for PSO
In the PSO algorithm, the commonly used parameters are given in the
Table 3.
2.5.2. Variables to be Optimized
Table 4 shows variables selected to be optimized.
2.5.3. Boundary Limits of Variables
The boundary limits imposed on the design are presented in
Table 5.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}