
Abnormal Detection for Running State of Linear Motor Feeding System Based on Deep Neural Networks


 and
and
Abstract
:1. Introduction
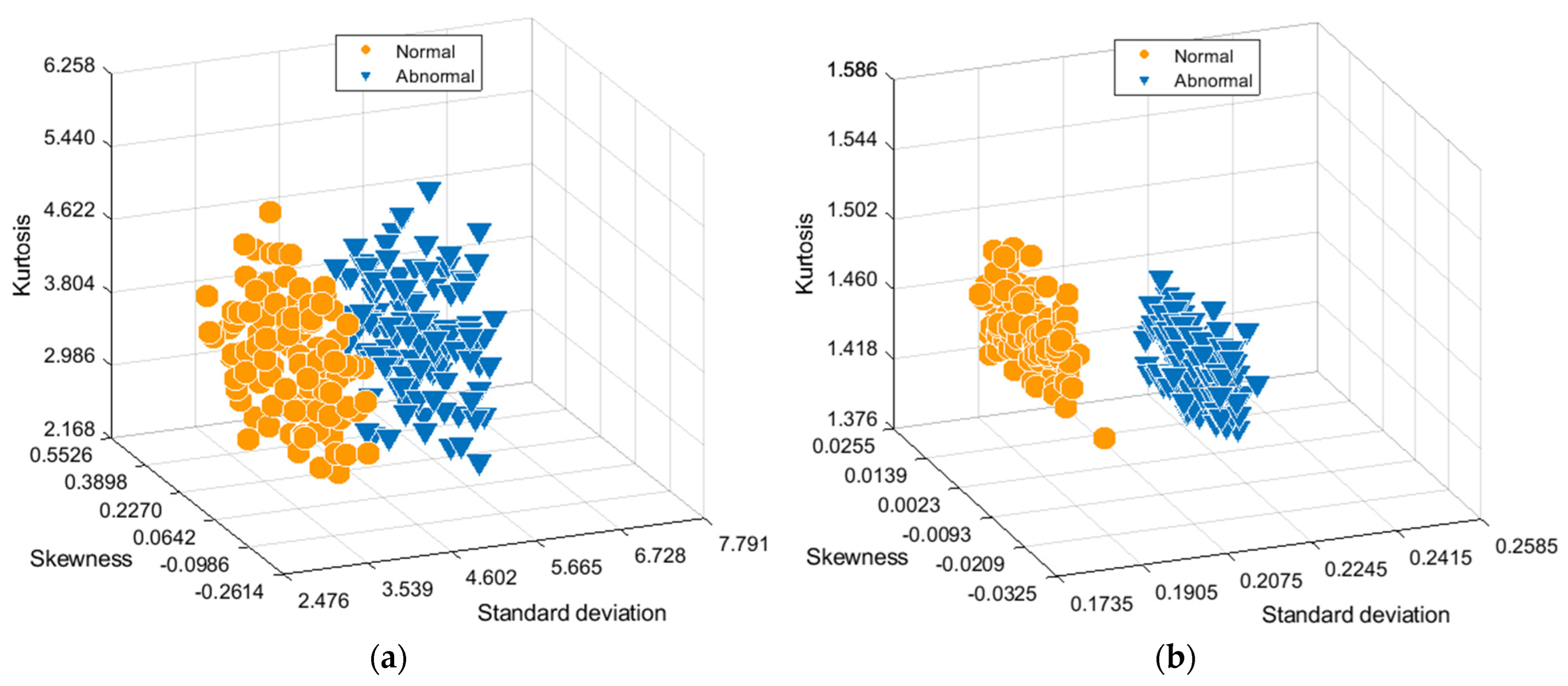
- A GANomaly-LSTM method is proposed, which can effectively avert the teasers of gradient disappearance and gradient explosion during the course of training time-series data, and the extracted features can achieve a good clustering effect.
- This method can realize anomaly detection in the absence of abnormal sample training.
- The proposed model performs well in anomaly detection of phase-missing current signals and vibration signals, verified under three input conditions.
- A mass of experiments have been actualized, and the results indicate that the proposed method achieves excellent advantages in effectiveness and performance compared with other classical methods.
2. Anomaly Detection Model of Linear Motor Feeding System
2.1. Factors Affecting the Running State of Linear Motor Feeding System
2.2. Anomaly Detection Model
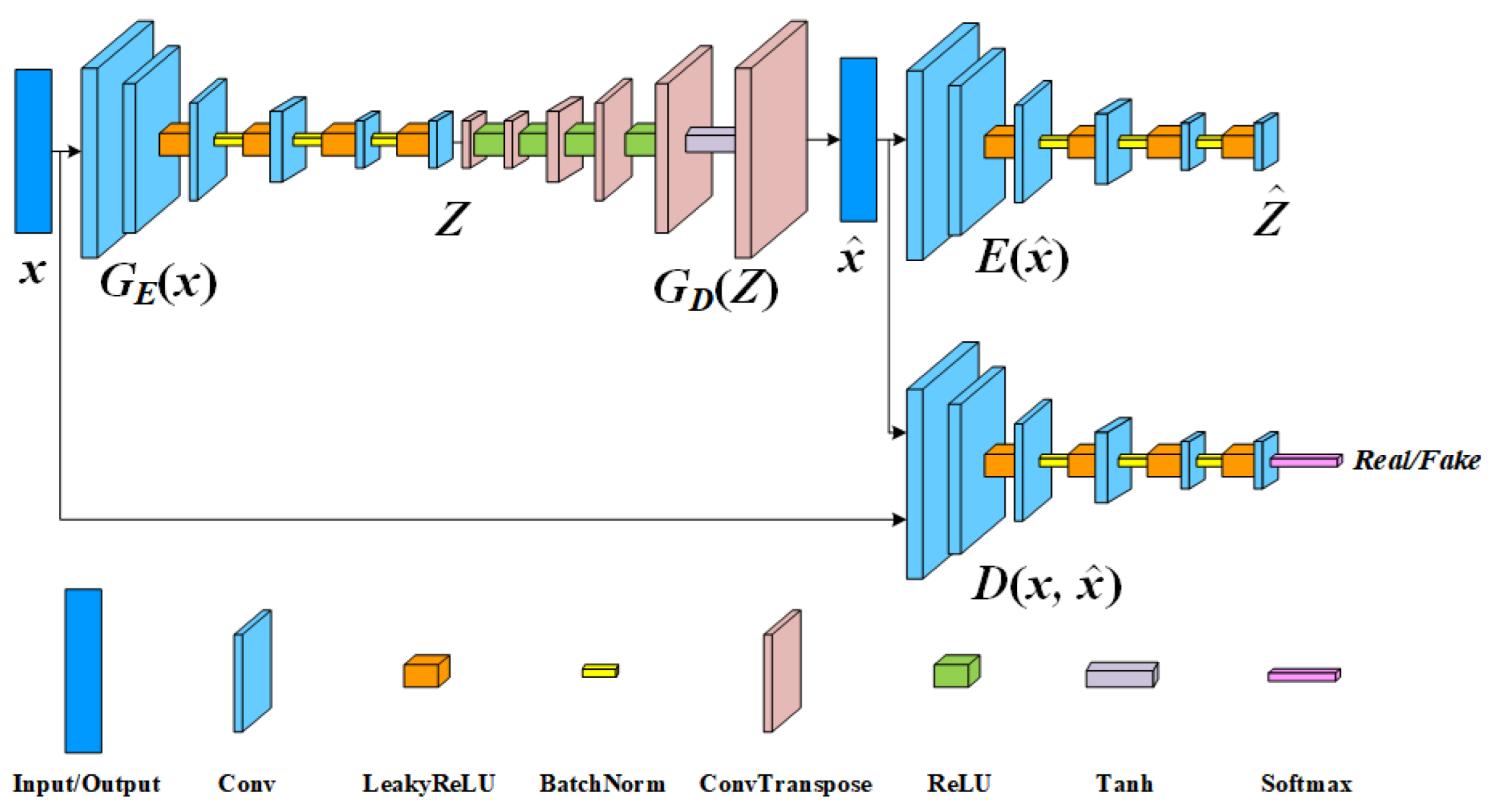
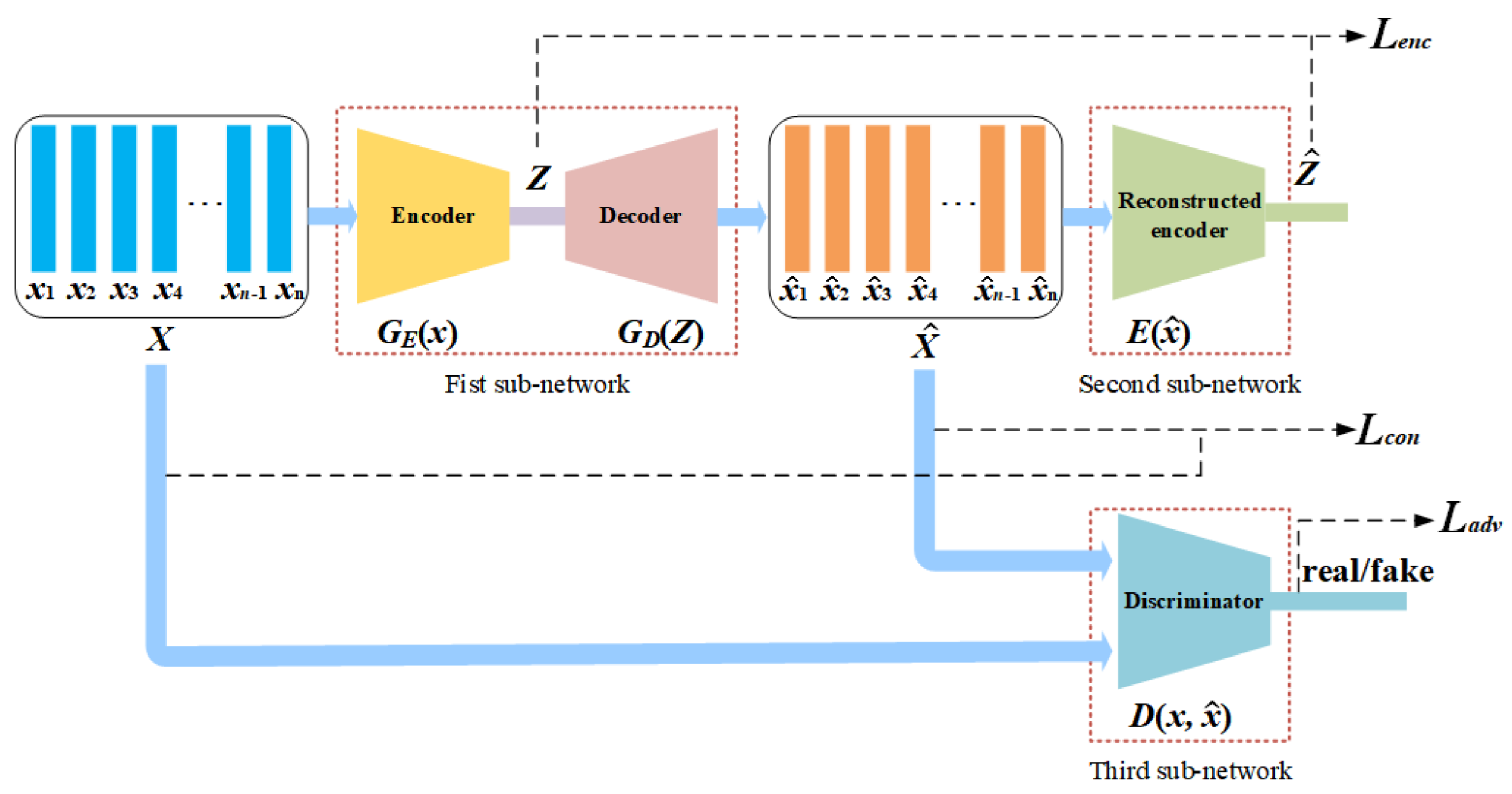
2.2.1. The Structure of GANomaly
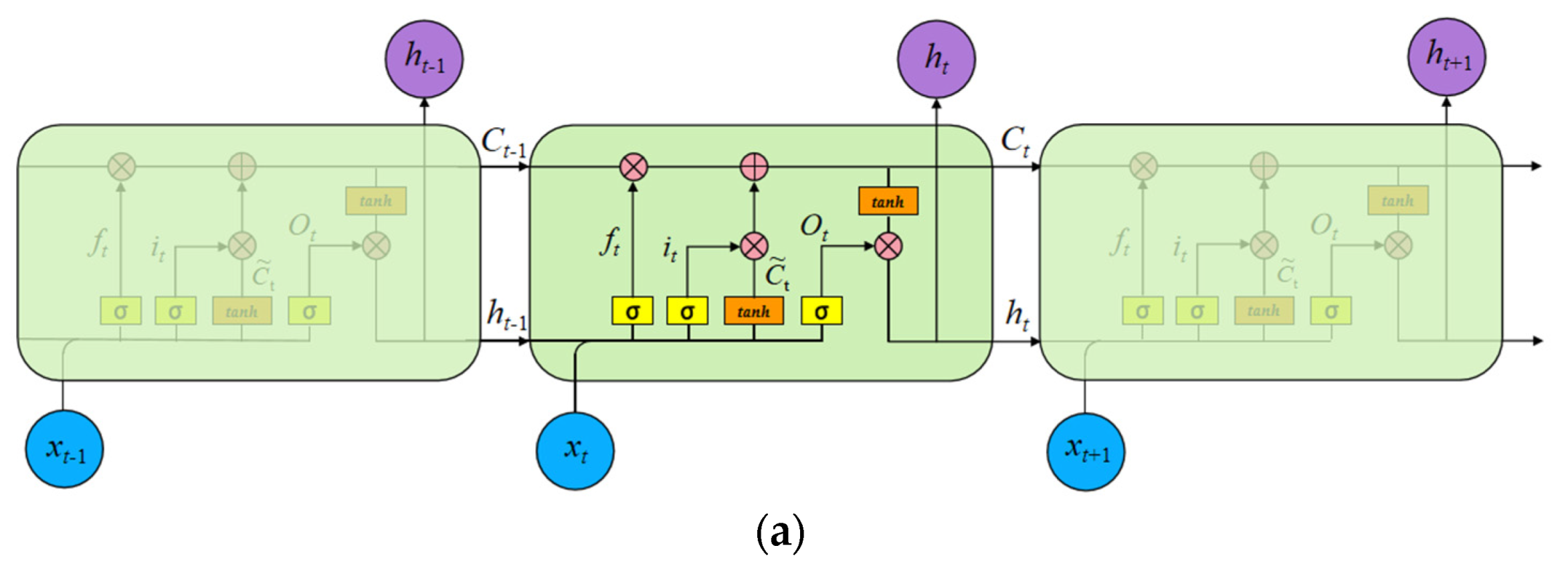
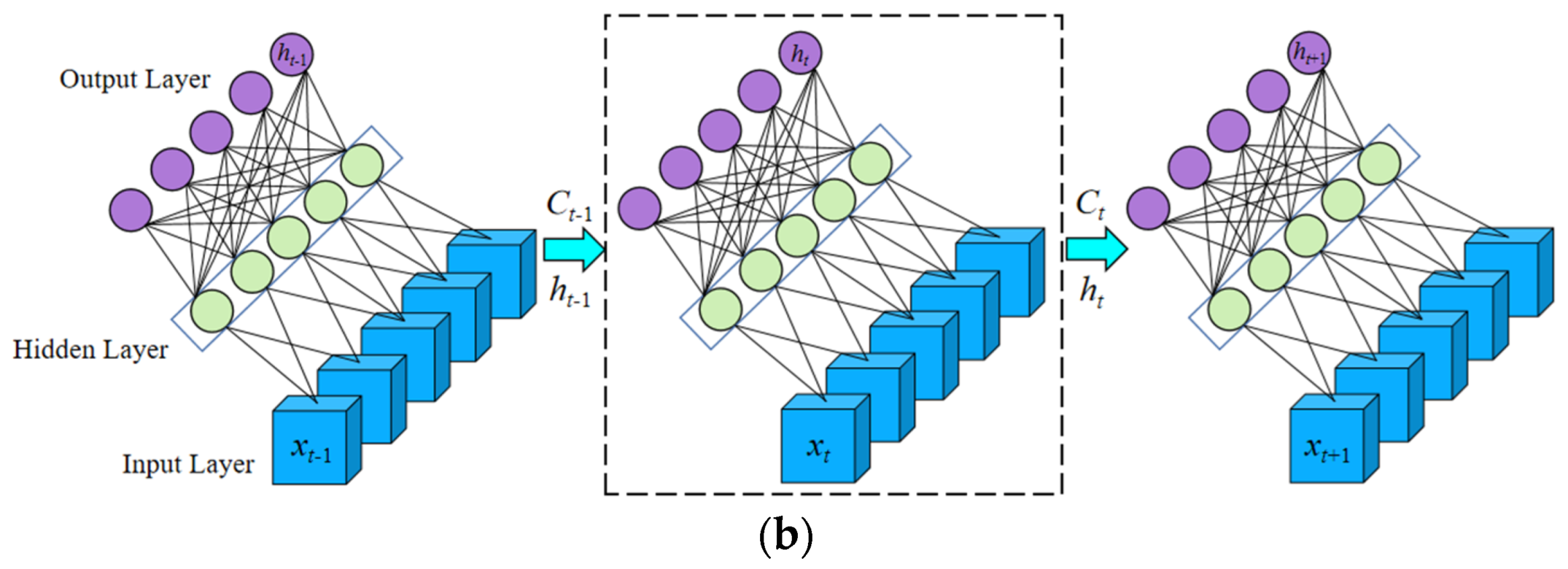
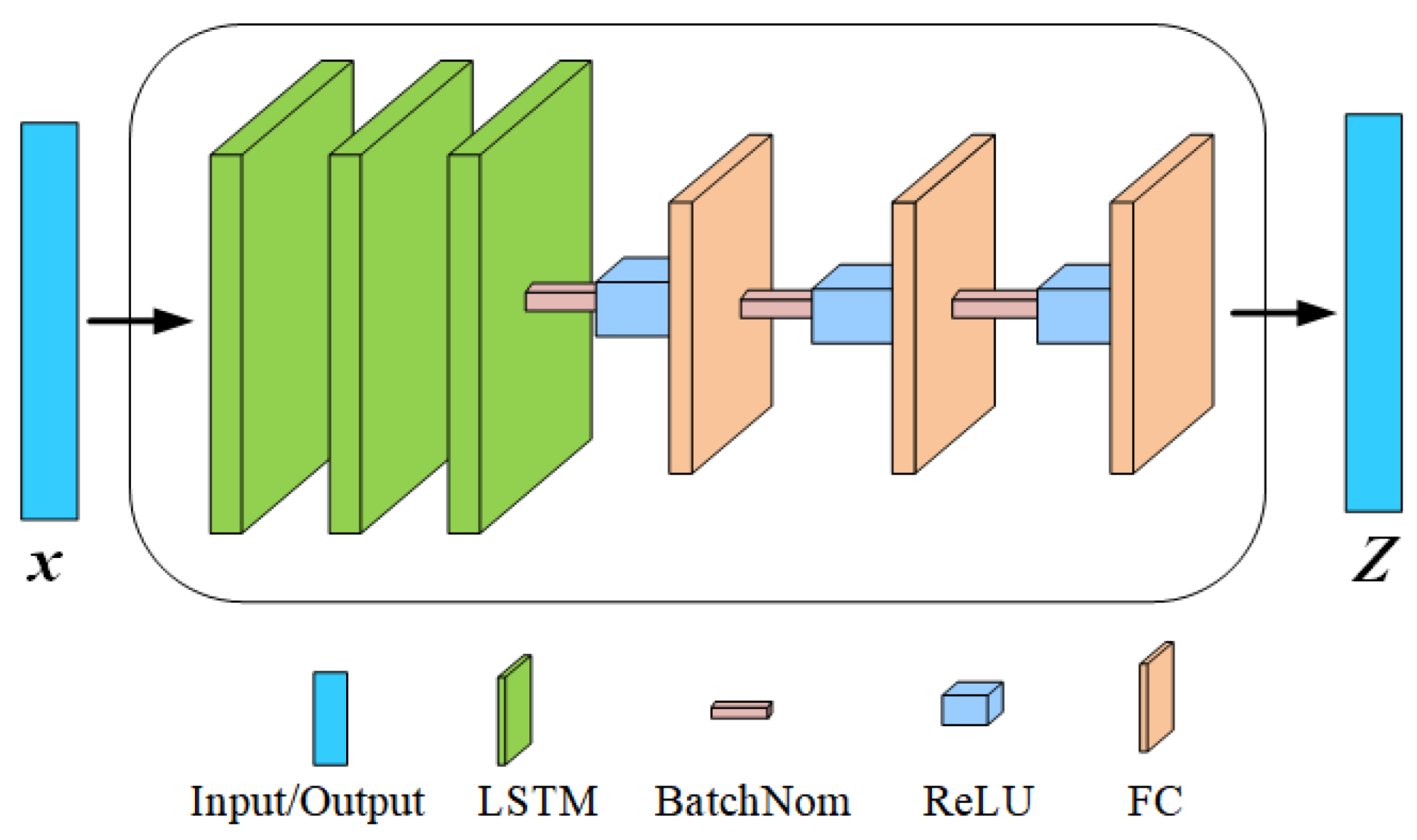
2.2.2. The Structure of LSTM
2.2.3. Proposed Method
The Structure of GANomaly-LSTM
Loss Function
Model Validation and Evaluation Criteria
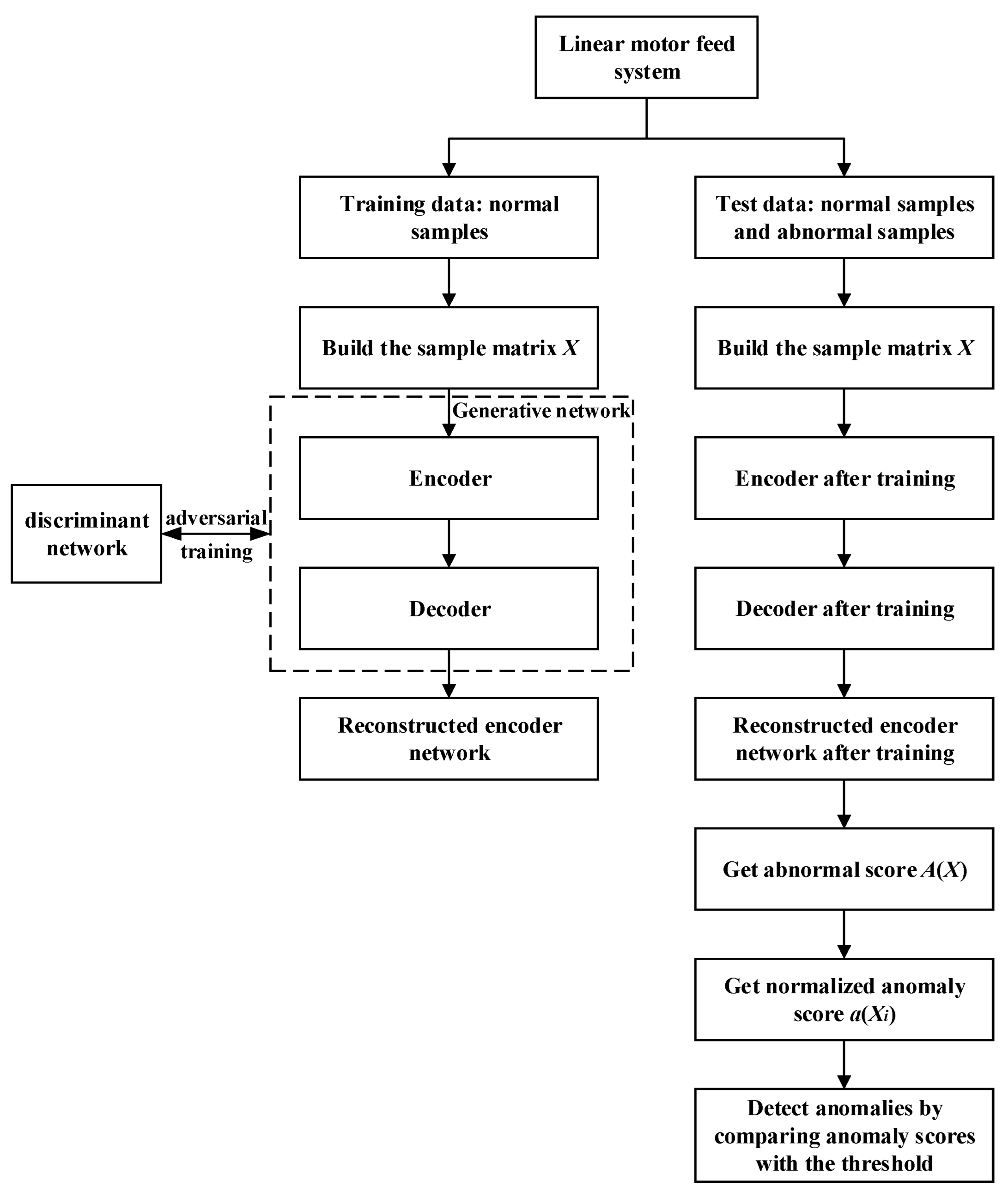
2.3. Anomaly Detection Process
- STEP1: The sensor collects relevant time-series signals in real time, and a sample matrix is constructed for the collected normal samples.where is the number of samples in a sequence, and is the number of sensors.
- STEP2: The normal-sample matrix is inputted into the encoder , then the LSTM network extracts the time-series features, later the latent feature vector is gained through three-layer fully connected layers, and lastly the reconstructed data is obtained through the decoder .
- STEP3: The discriminant network discriminates the normal samples and the reconstructed data samples , and continuously narrows the gap between the two during the confrontational training process.
- STEP4: The reconstructed data is inputted into the reconstructed encoder network, and then the latent feature vector is attained.
- STEP1: After the model training, the normal and abnormal samples are used to construct the sample matrix for testing. At this time, the discriminant network is no longer used. In the testing stage, network model parameters are fixed and outputted by training stage. The potential feature vector is obtained through , then the reconstructed data is gained through , and finally, the potential feature vector of the reconstructed data is garnered through .
- STEP2: The anomaly score of the input sample is computed according to the loss functions and . The final anomaly score is obtained by normalizing .
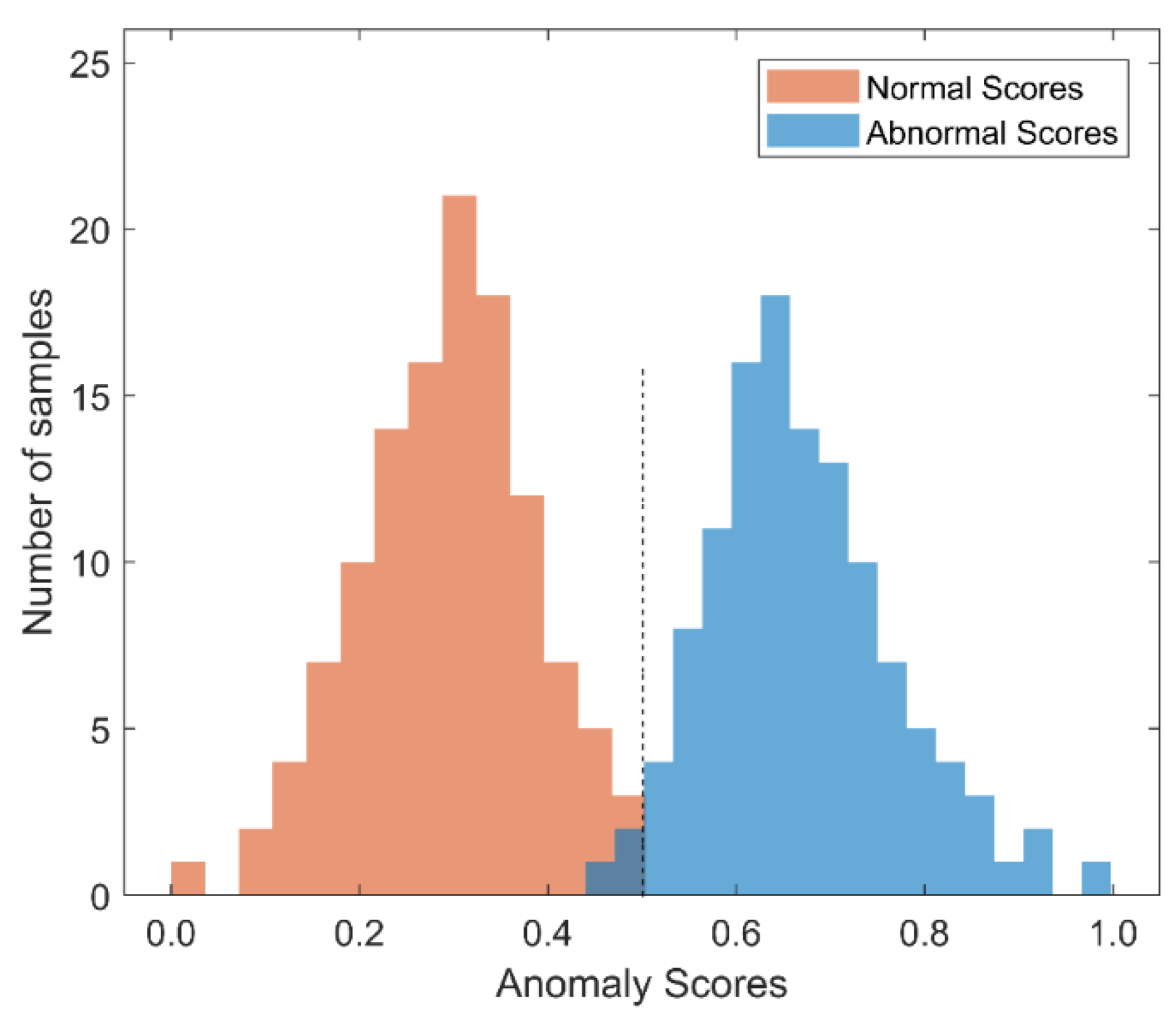
- STEP3: It is determined whether the input sample is abnormal or not according to the relationship between the abnormal score and a certain threshold . If , the input sample will be classified as an abnormal sample; otherwise it is a normal sample.
3. Experimental Setup and Feature Extraction
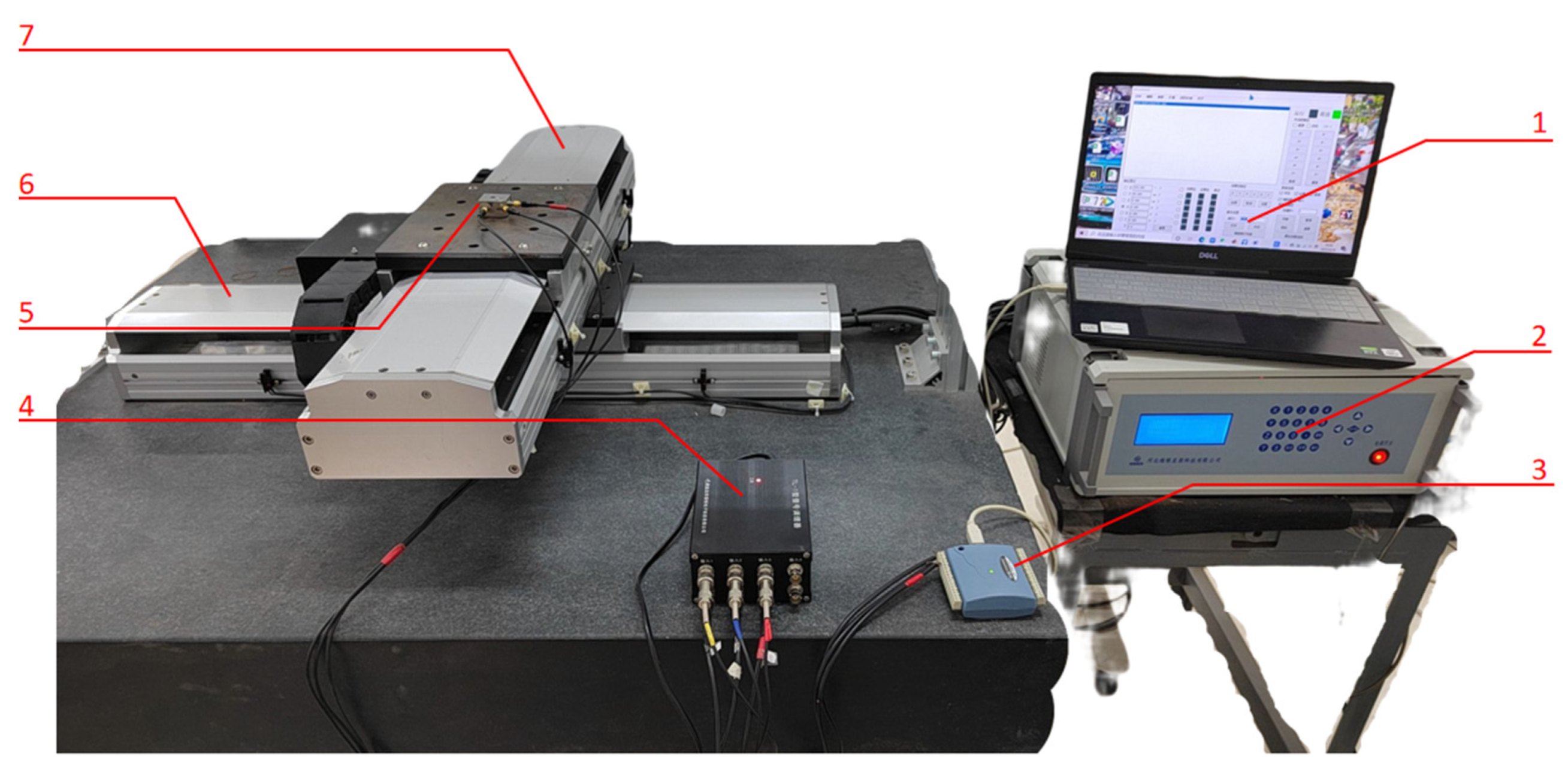
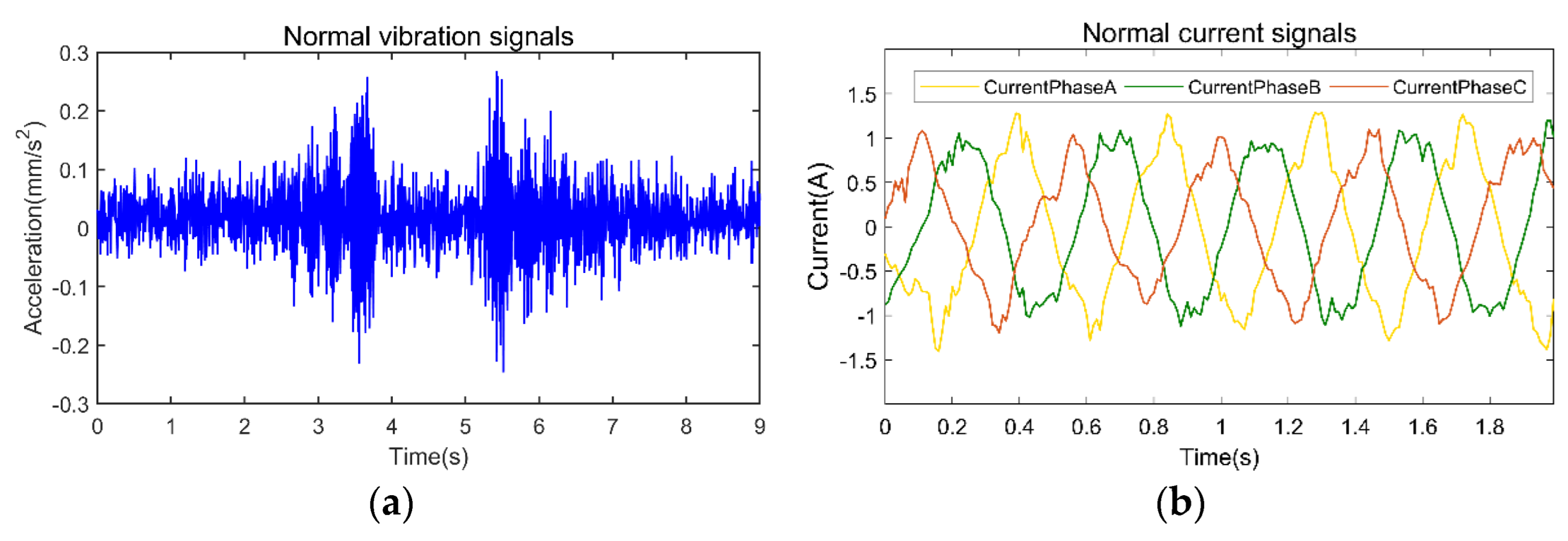
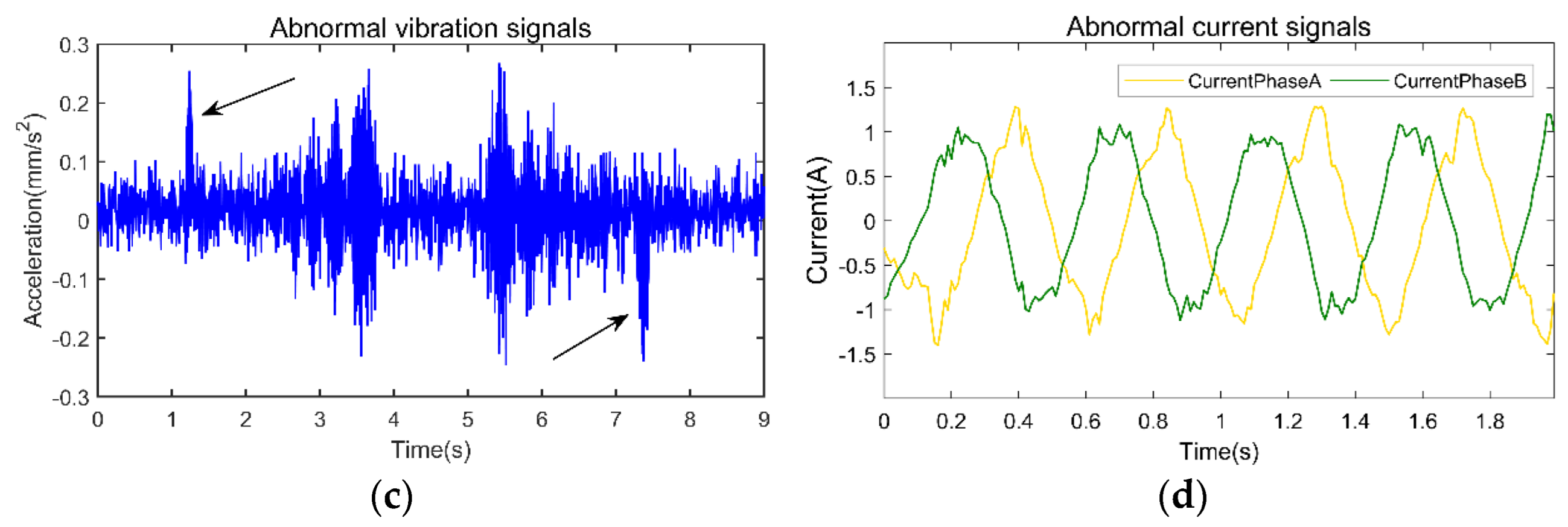
3.1. Construction of Experimental Platform and Data Collection
3.2. Design of Experimental Working Conditions and Description of Data Samples
3.3. Experimental Environment and Model Parameters
3.4. Signal Feature Extraction
4. Analysis of Experimental Results
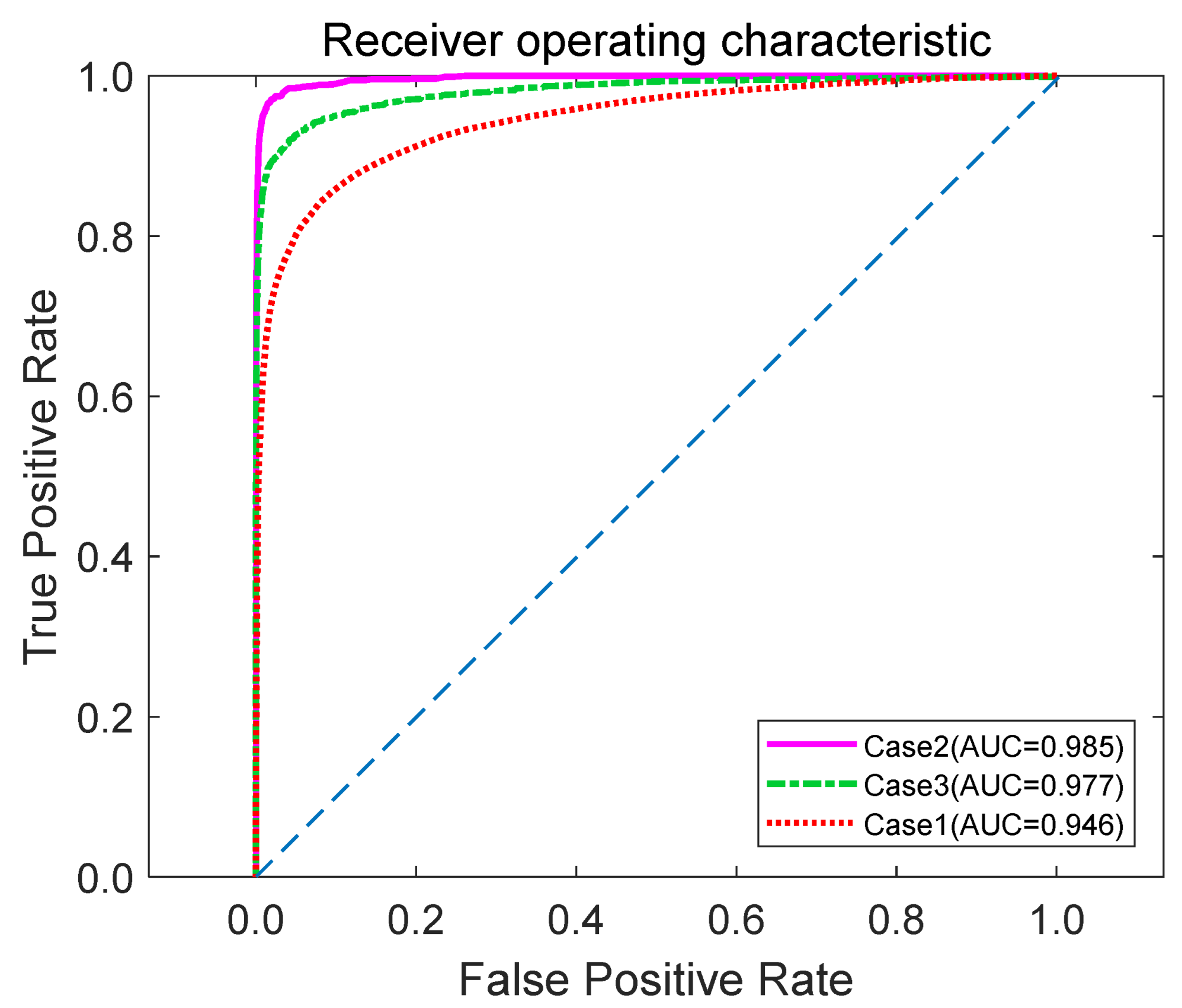
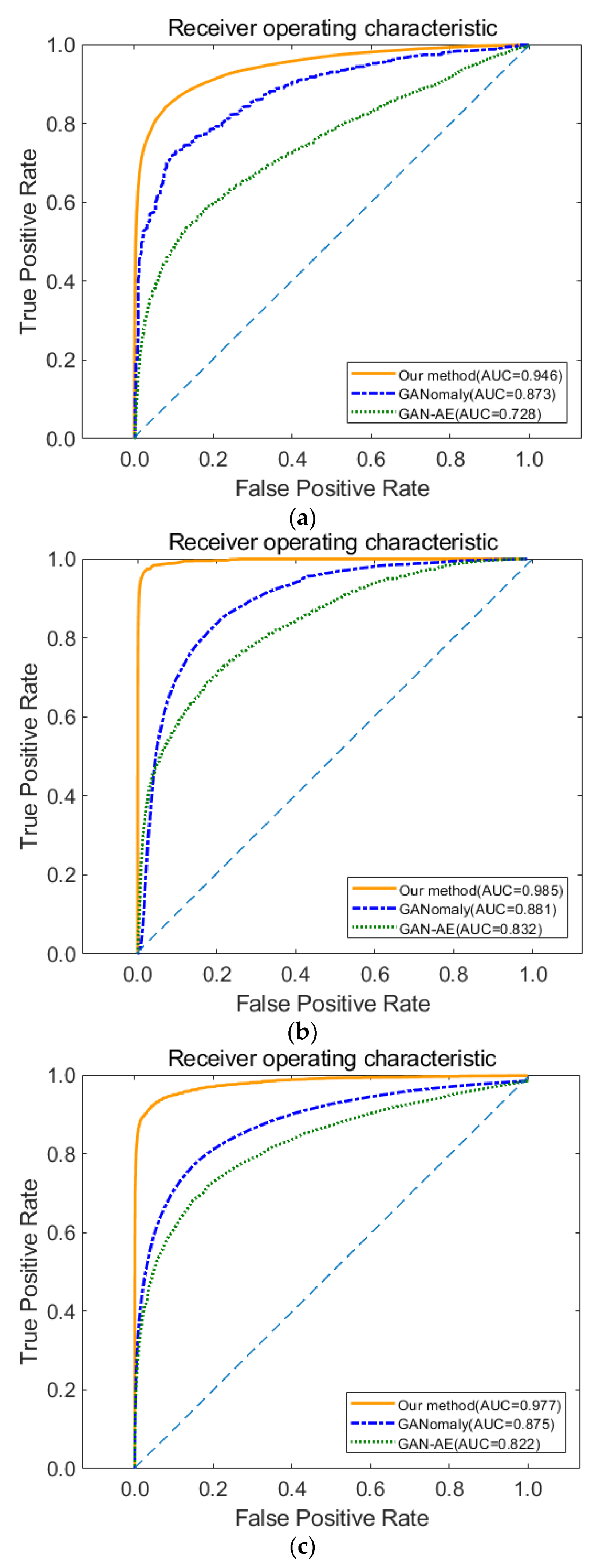
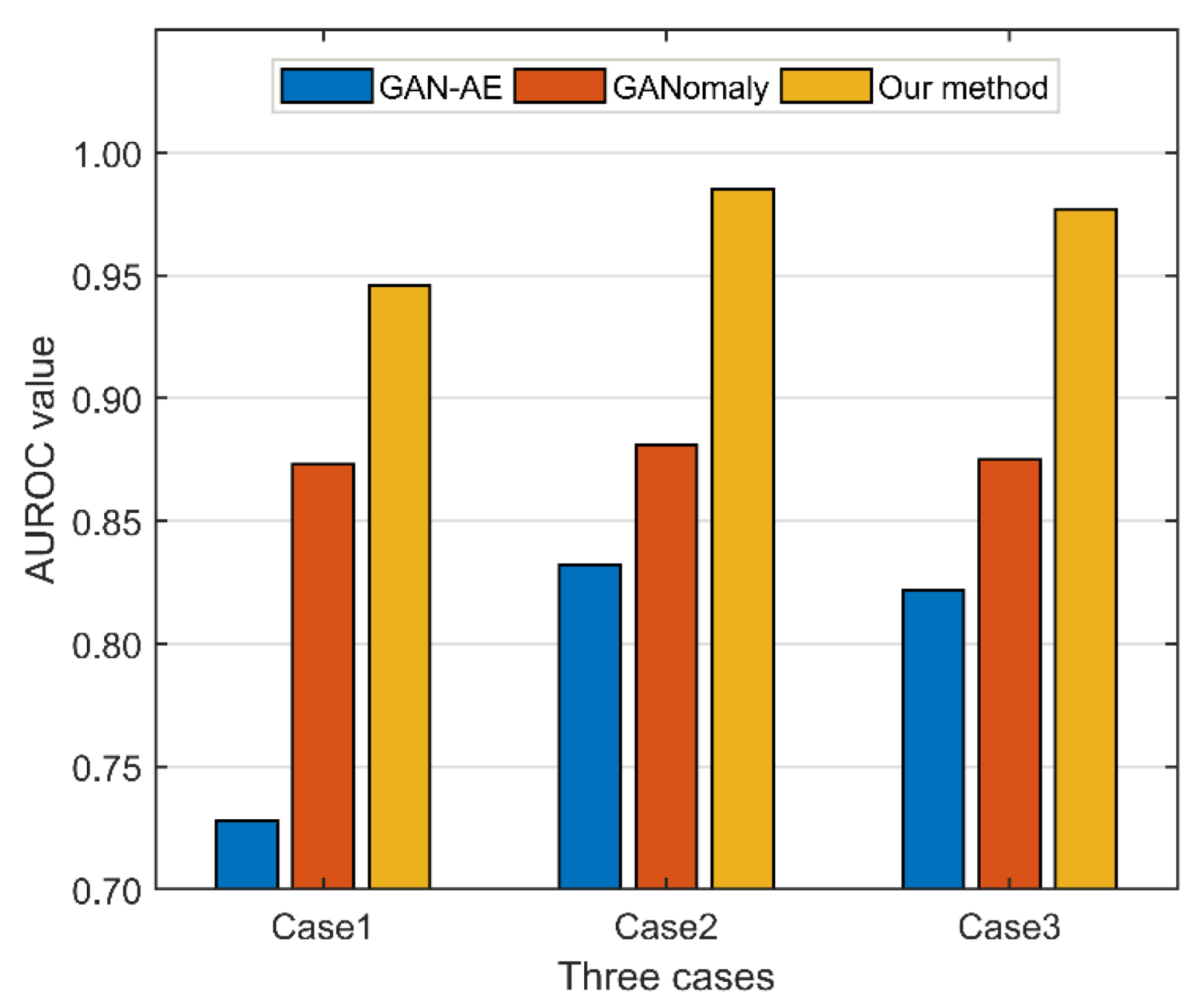
- Case1: Vibration data sample;
- Case2: Current data sample;
- Case3: Vibration and Current Composite Data Sample.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Altintas, Y.; Verl, A.; Brecher, C.; Uriarte, L.; Pritschow, G. Machine tool feed drives. CIRP Ann. Manuf. Technol. 2010, 60, 779–796. [Google Scholar] [CrossRef]
- Wang, B.; Mao, Z. Outlier detection based on Gaussian process with application to industrial processes. Appl. Soft. Comput. 2019, 76, 505–516. [Google Scholar] [CrossRef]
- Jin, X.; Sun, Y.; Que, Z.; Wang, Y.; Zhou, X. Anomaly detection and fault prognosis for bearings. IEEE Trans. Instrum. Meas. 2016, 65, 2046–2054. [Google Scholar] [CrossRef]
- Liu, J.; Liu, L.; Du, J.; Sang, J. TLE outlier detection based on expectation maximization algorithm. Adv. Space Res. 2021, 68, 2695–2712. [Google Scholar] [CrossRef]
- Su, J.; Dong, Y.; Yan, M.; Qian, J.; Xin, Y. Research progress of anomaly detection for complex networks. Control Decis. 2021, 36, 1293–1310. [Google Scholar]
- Li, Z.; Jin, X.; Zhuang, C.; Sun, Z. A Survey of Graph-Oriented Anomaly Detection Research. J. Softw. 2021, 32, 167–193. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Zong, M.; Zhu, X.; Wang, R. Efficient kNN Classification with Different Number of Nearest Neighbors. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1774–1785. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Izakian, H.; Pedrycz, W.; Jamal, I. Clustering-based anomaly detection in multivariate time series data. Appl. Soft. Comput. 2021, 100, 106919. [Google Scholar] [CrossRef]
- Li, T.; Comer, M.L.; Delp, E.J.; Desai, S.R.; Mathieson, J.L.; Foster, R.H.; Chan, M.W. Anomaly Scoring for Prediction-Based Anomaly Detection in Time Series. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–7. [Google Scholar]
- Zhou, Y.; Ren, H.; Li, Z.; Wu, N.; AI-Ahmari, A.M. Anomaly detection via a combination model in time series data. Appl. Intell. 2021, 51, 4874–4887. [Google Scholar] [CrossRef]
- Abdulghafoor, S.A.; Mohamed, L.A. A local density-based outlier detection method for high dimension data. Int. J. Nonlinear Anal. Appl. 2022, 13, 1683–1699. [Google Scholar]
- Jin, W.; Tung, A.K.H.; Han, J.; Wang, W. Ranking Outliers using Symmetric Neighborhood Relationship. In Advances in Knowledge Discovery and Data Mining; Ng, W.K., Kitsuregawa, M., Li, J., Chang, K., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2006; Volume 3918, pp. 577–593. ISBN 978-3-540-33206-0. [Google Scholar]
- Zhao, R.; Yan, R.; Chen, Z. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Proc. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. Rolling element bearing fault diagnosis using convolutional neural network and vibration image. Cogn. Syst. Res. 2019, 53, 42–50. [Google Scholar] [CrossRef]
- Shao, H.; Ding, Z.; Cheng, J.; Jiang, H. Intelligent fault diagnosis among different rotating machines using novel stacked transfer auto-encoder optimized by PSO. ISA Trans. 2020, 105, 308–319. [Google Scholar]
- Jiang, G.; Zhao, J.; Jia, C.; He, Q.; Xie, P.; Meng, Z. Intelligent fault diagnosis of gearbox based on vibration and current signals: A multimodal deep learning approach. In Proceedings of the 2019 Prognostics and System Health Management Conference, Qingdao, China, 25–27 October 2019; pp. 1–6. [Google Scholar]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Available online: https://arxiv.org/abs/1406.2661 (accessed on 20 June 2022).
- Xia, X.; Pan, X.; Li, N.; He, X.; Ma, L.; Zhang, X.; Ding, N. GAN-based Anomaly Detection: A Review. Neurocomputing 2022, 493, 497–535. [Google Scholar] [CrossRef]
- Zenati, H.; Foo, C.S.; Lecouat, B.; Manek, G.; Chandrasekhar, V.R. Efficient Ganbased Anomaly Detection. Available online: https://arxiv.org/abs/1802.06222 (accessed on 20 June 2022).
- Radford, A.; Metz, L.; Chintala, S. Unsupervised representation learning with deep convolutional generative adversarial networks. Available online: https://arxiv.org/abs/1511.06434 (accessed on 20 June 2022).
- Schlegl, T.; Seeböck, P.; Waldstein, S.M.; Schmidt-Erfurth, U.; Langs, G. Unsupervised anomaly detection with generative adversarial networks to guide marker discovery. In Information Processing in Medical Imaging; Niethammer, M., Styner, M., Aylward, S., Zhu, H., Ogue, L., Yap, P., Shen, D., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2017; Volume 10265, pp. 146–157. ISBN 978-3-319-59049-3. [Google Scholar]
- Wang, Z.; Wang, J.; Wang, Y. An intelligent diagnosis scheme based on generative adversarial learning deep neural networks and its application to planetary gearbox fault pattern recognition. Neurocomputing 2018, 310, 213–222. [Google Scholar] [CrossRef]
- Mao, W.; Liu, Y.; Ding, L.; Yuan, L. Imbalanced Fault Diagnosis of Rolling Bearing Based on Generative Adversarial Network: A Comparative Study. IEEE Access 2019, 7, 9515–9530. [Google Scholar] [CrossRef]
- Gao, X.; Deng, F.; Yue, X. Data augmentation in fault diagnosis based on the Wasserstein generative adversarial network with gradient penalty. Neurocomputing 2020, 396, 487–494. [Google Scholar] [CrossRef]
- Akçay, S.; Atapour-Abarghouei, A.; Breckon, T.P. GANomaly: Semi-supervised anomaly detection via adversarial training. In Computer Vision-ACCV 2018; Jawahar, C., Li, H., Mori, G., Schindler, K., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2019; Volume 11363, pp. 622–637. ISBN 978-3-030-20892-9. [Google Scholar]
- Akçay, S.; Atapour-Abarghouei, A.; Breckon, T.P. Skip-GANomaly: Skip connected and adversarially trained encoder-decoder anomaly detection. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar]
- Luo, Z.; Zuo, R.; Xiong, Y.; Wang, X. Detection of geochemical anomalies related to mineralization using the GANomaly network. Appl. Geochem. 2021, 131, 105043. [Google Scholar] [CrossRef]
- Liu, G.; Niu, Y.; Zhao, W.; Duan, Y.; Shu, J. Data anomaly detection for structural health monitoring using a combination network of GANomaly and CNN. Smart. Struct. Syst. 2022, 29, 53–62. [Google Scholar]
- Hong, Z.; Yang, Z.; Yang, C.; Liao, S.; Sun, Y.; Xing, Y. Triple-GAN with Fixed Memory Step Gradient Descent Method and Xwish Activation Function. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3188–3193. [Google Scholar]
- Duan, S.; Chen, Z.; Wu, Q.M.J.; Cai, L.; Lu, D. Multi-scale gradients self-attention residual learning for face photo-sketch transformation. IEEE Trans. Inf. Forensic Secur. 2020, 16, 1218–1230. [Google Scholar] [CrossRef]
- Lindemann, B.; Maschler, B.; Sahlab, N.; Weyrich, M. A survey on anomaly detection for technical systems using LSTM networks. Comput. Ind. 2021, 131, 103498. [Google Scholar] [CrossRef]
- Li, Z.; Li, J.; Wang, Y.; Wang, K. A deep learning approach for anomaly detection based on SAE and LSTM in mechanical equipment. Int. J. Adv. Manuf. Technol. 2019, 103, 499–510. [Google Scholar] [CrossRef]
- Chen, H.; Liu, H.; Chu, X.; Liu, Q.; Xue, D. Anomaly detection and critical SCADA parameters identification for wind turbines based on LSTM-AE neural network. Renew. Energy 2021, 172, 829–840. [Google Scholar] [CrossRef]
- Vos, K.; Peng, Z.; Jenkins, C.; Shahriar, M.R.; Borghesani, P.; Wang, W. Vibration-based anomaly detection using LSTM/SVM approaches. Mech. Syst. Signal Proc. 2022, 169, 108752. [Google Scholar] [CrossRef]
- Ou, X.; Wen, G.; Huang, X.; Su, Y.; Chen, X.; Lin, H. A deep sequence multi-distribution adversarial model for bearing abnormal condition detection. Measurement 2021, 182, 109529. [Google Scholar] [CrossRef]
- Bai, M.; Liu, J.; Ma, Y.; Zhao, X.; Long, Z.; Yu, D. Long Short-Term Memory Network-Based Normal Pattern Group for Fault Detection of Three-Shaft Marine Gas Turbine. Energies 2021, 14, 13. [Google Scholar] [CrossRef]
- Kong, F.; Li, J.; Jiang, B.; Wang, H.; Song, H. Integrated generative model for industrial anomaly detection via bi-directional LSTM and attention mechanism. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]
- Yang, H.; Wang, Z.; Zhang, T.; Du, F. A review on vibration analysis and control of machine tool feed drive systems. Int. J. Adv. Manuf. Technol. 2020, 107, 1–23. [Google Scholar] [CrossRef]
- Yan, K. Chiller fault detection and diagnosis with anomaly detective generative adversarial network. Build. Environ. 2021, 201, 107982. [Google Scholar] [CrossRef]
- Du, J.; Guo, L.; Song, L.; Liang, H.; Chen, T. Anomaly detection of aerospace facilities using GANomaly. In Proceedings of the 2020 5th International Conference on Multimedia Systems and Signal Processing, Wuhan, China, 8–10 May 2020; pp. 40–44. [Google Scholar]
- Wang, F.; Liu, X.; Deng, G.; Yu, X.; Li, H.; Han, Q. Remaining life prediction method for rolling bearing based on the long short-term memory network. Neural Process. Lett. 2019, 50, 2437–2454. [Google Scholar] [CrossRef]
- Huang, R.; Wei, C.; Wang, B.; Yang, J.; Xu, X.; Wu, S.; Huang, S. Well performance prediction based on Long Short-Term Memory (LSTM) neural network. J. Pet. Sci. Eng. 2022, 208, 109686. [Google Scholar] [CrossRef]
- Ruder, S. An Overview of Gradient Descent Optimization Algorithms. Available online: https://arxiv.org/abs/1609.04747 (accessed on 30 July 2022).
- Kingma, D.P.; Ba, J. Adam: A method for Stochastic Optimization. Available online: https://arxiv.org/abs/1412.6980 (accessed on 30 July 2022).
- Chen, Z.; Gryllias, K.; Li, W. Intelligent Fault Diagnosis for Rotary Machinery Using Transferable Convolutional Neural Network. IEEE Trans. Ind. Inform. 2020, 16, 339–349. [Google Scholar] [CrossRef]
- Ravikumar, K.N.; Yadav, A.; Kumar, H.; Gangadharan, K.V.; Narasimhadhan, A.V. Gearbox fault diagnosis based on Multi-Scale deep residual learning and stacked LSTM model. Measurement 2021, 186, 110099. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LSTM | RNN | |
|---|---|---|
| Advantages | 1. The problem of gradient disappearance and gradient explosion can be overcome when training long sequence data; 2. Able to learn long-term dependence; 3. Simple to implement. | 1. Train the time-series data; 2. The network is simple and easy to operate. |
| Limitations | 1. Because of the large amount of computation in network training, high performance computers are needed. | 1. Cannot process long time-series data; 2. There are problems of gradient disappearance and gradient explosion. |
| Number | Equipment Name |
|---|---|
| 1 | Computer processing center |
| 2 | Linear motor feeding system controller |
| 3 | Data acquisition card |
| 4 | Signal conditioner |
| 5 | Accelerometer |
| 6 | X-axis feeding system |
| 7 | Y-axis feeding system |
| Number | Load (kg) | X/Y Axis | Displacement Interval (mm) | Speed (mm/s) |
|---|---|---|---|---|
| 1 | No load | X axis | 60, 180, 300, 420 | 60 |
| 2 | No load | X axis | 60, 180, 300, 420 | 80 |
| 3 | No load | X axis | 60, 180, 300, 420 | 100 |
| 4 | No load | X axis | 60, 180, 300, 420 | 120 |
| 5 | No load | Y axis | 60, 180, 300, 420 | 60 |
| 6 | No load | Y axis | 60, 180, 300, 420 | 80 |
| 7 | No load | Y axis | 60, 180, 300, 420 | 100 |
| 8 | No load | Y axis | 60, 180, 300, 420 | 120 |
| 9 | No load | X-Y axis linkage | 60, 180, 300, 420 | 60 |
| 10 | No load | X-Y axis linkage | 60, 180, 300, 420 | 80 |
| 11 | No load | X-Y axis linkage | 60, 180, 300, 420 | 100 |
| 12 | No load | X-Y axis linkage | 60, 180, 300, 420 | 120 |
| 13 | Load 10 kg | X axis | 60, 180, 300, 420 | 60 |
| 14 | Load 10 kg | X axis | 60, 180, 300, 420 | 80 |
| 15 | Load 10 kg | X axis | 60, 180, 300, 420 | 100 |
| 16 | Load 10 kg | X axis | 60, 180, 300, 420 | 120 |
| 17 | Load 10 kg | Y axis | 60, 180, 300, 420 | 60 |
| 18 | Load 10 kg | Y axis | 60, 180, 300, 420 | 80 |
| 19 | Load 10 kg | Y axis | 60, 180, 300, 420 | 100 |
| 20 | Load 10 kg | Y axis | 60, 180, 300, 420 | 120 |
| 21 | Load 10 kg | X-Y axis linkage | 60, 180, 300, 420 | 60 |
| 22 | Load 10 kg | X-Y axis linkage | 60, 180, 300, 420 | 80 |
| 23 | Load 10 kg | X-Y axis linkage | 60, 180, 300, 420 | 100 |
| 24 | Load 10 kg | X-Y axis linkage | 60, 180, 300, 420 | 120 |
| Parameters | Learning Rate | ||||
|---|---|---|---|---|---|
| Value | 1 | 1 | 0.5 | 0.8 | 0.0001 |
| Case | AUROC | AUPRC |
|---|---|---|
| Case 1 | 0.946 | 0.948 |
| Case 2 | 0.985 | 0.982 |
| Case 3 | 0.977 | 0.969 |
| Case | Precision | Recall | F1 |
|---|---|---|---|
| Case 1 | 0.921 | 0.953 | 0.937 |
| Case 2 | 0.965 | 1.000 | 0.982 |
| Case 3 | 0.943 | 0.984 | 0.963 |
| AUROC | Case1 | Case2 | Case3 |
|---|---|---|---|
| GAN-AE | 0.728 | 0.832 | 0.822 |
| GANomaly | 0.873 | 0.881 | 0.875 |
| Our method | 0.946 | 0.985 | 0.977 |
| Case | Average Accuracy | Detection Time (ms) |
|---|---|---|
| GAN-AE | 0.825 | 418 |
| GANomaly | 0.864 | 357 |
| Our method | 0.980 | 134 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Zhang, W.; Cui, W.; Gao, L.; Chen, Y.; Wei, Q.; Liu, L. Abnormal Detection for Running State of Linear Motor Feeding System Based on Deep Neural Networks. Energies 2022, 15, 5671. https://0-doi-org.brum.beds.ac.uk/10.3390/en15155671
Yang Z, Zhang W, Cui W, Gao L, Chen Y, Wei Q, Liu L. Abnormal Detection for Running State of Linear Motor Feeding System Based on Deep Neural Networks. Energies. 2022; 15(15):5671. https://0-doi-org.brum.beds.ac.uk/10.3390/en15155671
Chicago/Turabian StyleYang, Zeqing, Wenbo Zhang, Wei Cui, Lingxiao Gao, Yingshu Chen, Qiang Wei, and Libing Liu. 2022. "Abnormal Detection for Running State of Linear Motor Feeding System Based on Deep Neural Networks" Energies 15, no. 15: 5671. https://0-doi-org.brum.beds.ac.uk/10.3390/en15155671