1. Introduction
Modern electricity systems cannot function without energy storage systems (ESSs). Furthermore, without ESSs, managing future power systems efficiently and profitably is challenging [
1]. Utilizing ESSs also improves voltage conditions, reduces system losses, increases transmission line capacity, and has other similar effects [
2]. In addition, ESSs are vital for power networks with a high penetration of renewable energy sources, since they help to smooth out the intermittent character of these sources [
3]. In transportation, ESSs are also commonly employed in the auto industry, namely with electric vehicles. The value of ESSs is steadily increasing as electric vehicles become more prevalent [
4,
5].
There are numerous kinds of ESSs in general [
6]. Mechanical systems are the oldest and, at the same time, most powerful systems. These include reversible power plant systems that employ water pools and in which the electric machine can function as both a generator (when power is delivered to the grid) and a motor to start the pump (when water is transferred from a lower-altitude basin to a higher-altitude basin) [
7]. Compressed air systems are also included in this category [
8]. The foregoing systems, however, share the common property of being territorially dependent. Aside from them, specific systems rely on chemical reactions to function. The most prominent of this group is batteries [
9], which have numerous applications, particularly in electric vehicles [
10]. The third category contains systems whose operation is governed by electrical engineering principles. This category includes supercapacitors (SCs) [
11,
12,
13,
14] and super magnetics (SMs) [
15]. These storage systems are distinguished by high efficiency, outstanding response speed, low self-discharge currents, and the ability to be integrated into any portion of the power system. These are the primary reasons SMs and SCs are treated more frequently in published research. Moreover, for automotive applications and fuel cells, SCs may deliver a significant amount of power with a quick dynamic response [
16].
Regarding SCs, the existing research contains a variety of modeling methodologies. Zhang et al. offered in [
13] an overview of their models while focusing on the potential aspects of SC device modeling. Zhang et al. discussed the implementation of SCs from management and control standpoints, described electrical, thermal, and self-discharge processes in SCs, and mentioned other electrochemical, equivalent, intelligent, and fractional-order models. In addition, they highlighted the applications of SC devices. Unlike Zhang’s findings, Mussolini presented in [
12] a full-frequency-range model capable of representing all SC-related events. In addition, the research proposed a method for determining the model parameters that can be utilized to characterize the SC before its application.
In contrast to the studies of Mussolini and Zhang, Grbovic [
17] described SC devices using variable capacitance. The core concern of Grbovic’s work [
17] was the analysis, modeling, and design of ultracapacitor modules and their interface with DC–DC power converters. In addition to highlighting the impacts of temperature on the model parameters, comprehensive and approximative models of replacement circuits were offered. In addition, the operating processes in the discharge and charging modes were discussed, along with the design challenge, the connection with converters, and specific application areas. These studies showed that the classic SC model, the resistance–capacitance (RC) model, which consists of capacitance and in-line resistance, can effectively represent the SC charging and discharging process [
18,
19,
20].
The loss term that characterizes internal heating in the capacitor is resistance. The chief benefit of RC models is that their parameters are constant over the entire operating temperature range. It should be noted that the authors in [
21] showed that increasing the temperature impacts resistance reduction and increases the capacitance of SC devices.
As explored in [
22], due to the vast number of applications for SCs, it is essential to fully understand and accurately evaluate their electric performance in various conditions for accurate assessment and monitoring of their state, control/management when integrated into systems, and their aging prediction. The operation of SC devices at constant current, impedance, and power is presented in [
22]. Mathematically, in the constant resistance discharge mode, the instantaneous power provided to the load is expressed using the gamma function in analytical form. In addition, the discharge voltage for a constant discharge current (
Icc) is expressed using the gamma function. In constant power applications, however, the voltage was represented as a differential equation for which the authors provided a numerical predictor–corrector-based solution. The way these devices work electrically depends on several things, such as the chemistry and structure of the materials they are made of, how they store energy, how they are used (such as temperature, type, mode, and rate of charging/discharging waveforms), and how these different things interact with each other [
22].
One of the most common ways to use these SCs in real life is in a mode called “constant power”. This is supported by the fact that many devices, such as lighting systems, data center power systems, cooling systems, and MPPT-regulated solar systems [
23,
24], work in constant power modes [
11,
12,
13,
25]. Using the Lambert
W function, the authors of [
26] explained how the SC device works and provided closed-form formulas for its electrical variables in a constant power application. Additionally, the authors of [
27] explained how the special trans function theory (STFT) of Perovich could describe the analytical closed-form expression of current and voltage for both charging and discharging and temperature change [
21]. The standard RC-based circuit model of SCs was used in both studies to investigate the changes in electric variables.
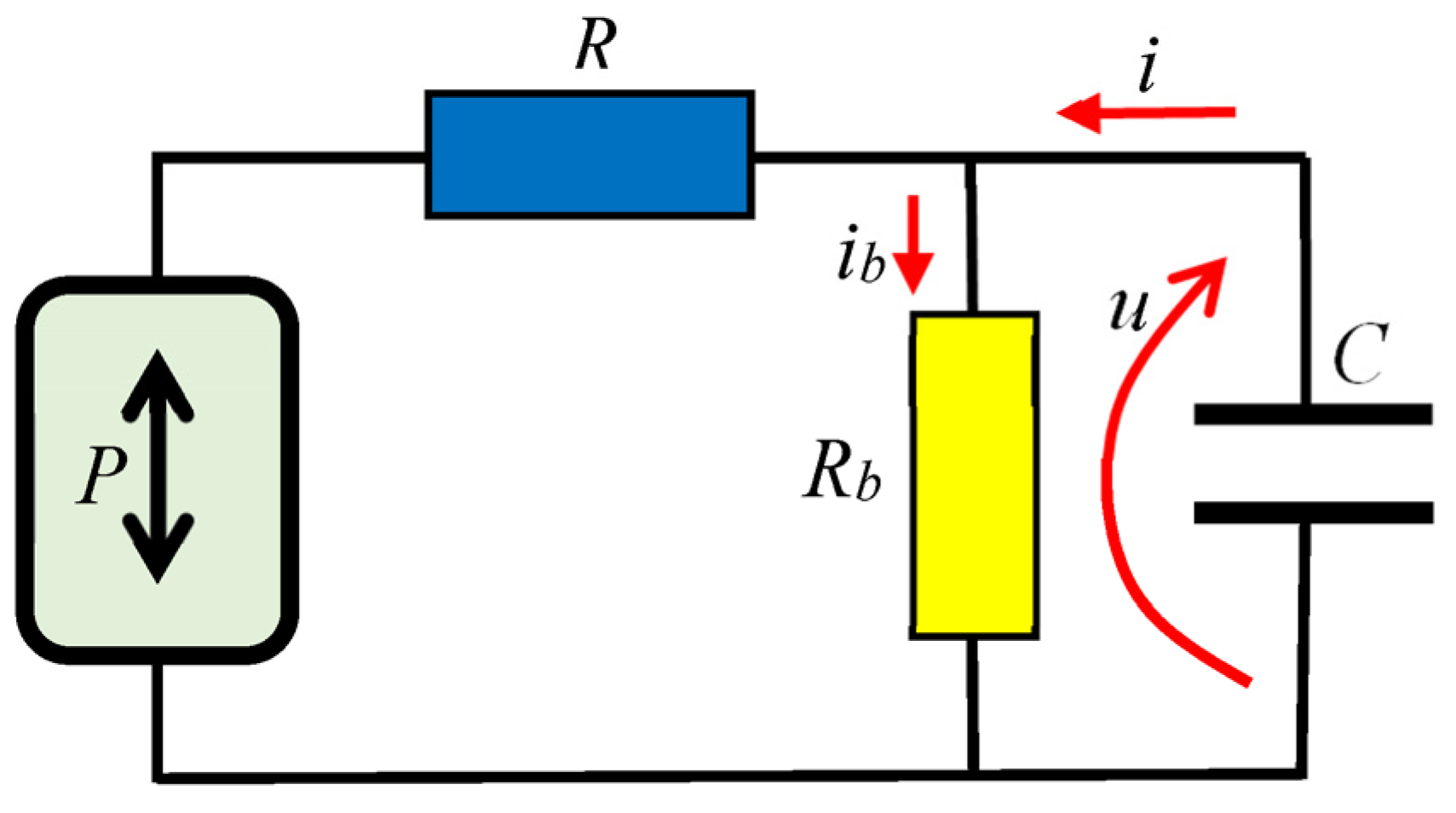
In contrast to the standard RC model, many research studies proposed using additional parallel resistance to characterize leakage currents (LCs) flowing in SCs. The charging current required to keep the SC voltage constant at a specified preset value is denoted by the LC. In manufacturers’ datasheets, LC is given as the value of charging current needed to keep the SC at rated voltage after it has been at rated voltage for 72 h at room temperature. Temperature, operational conditions, aging, and other factors alter LC over time [
28].
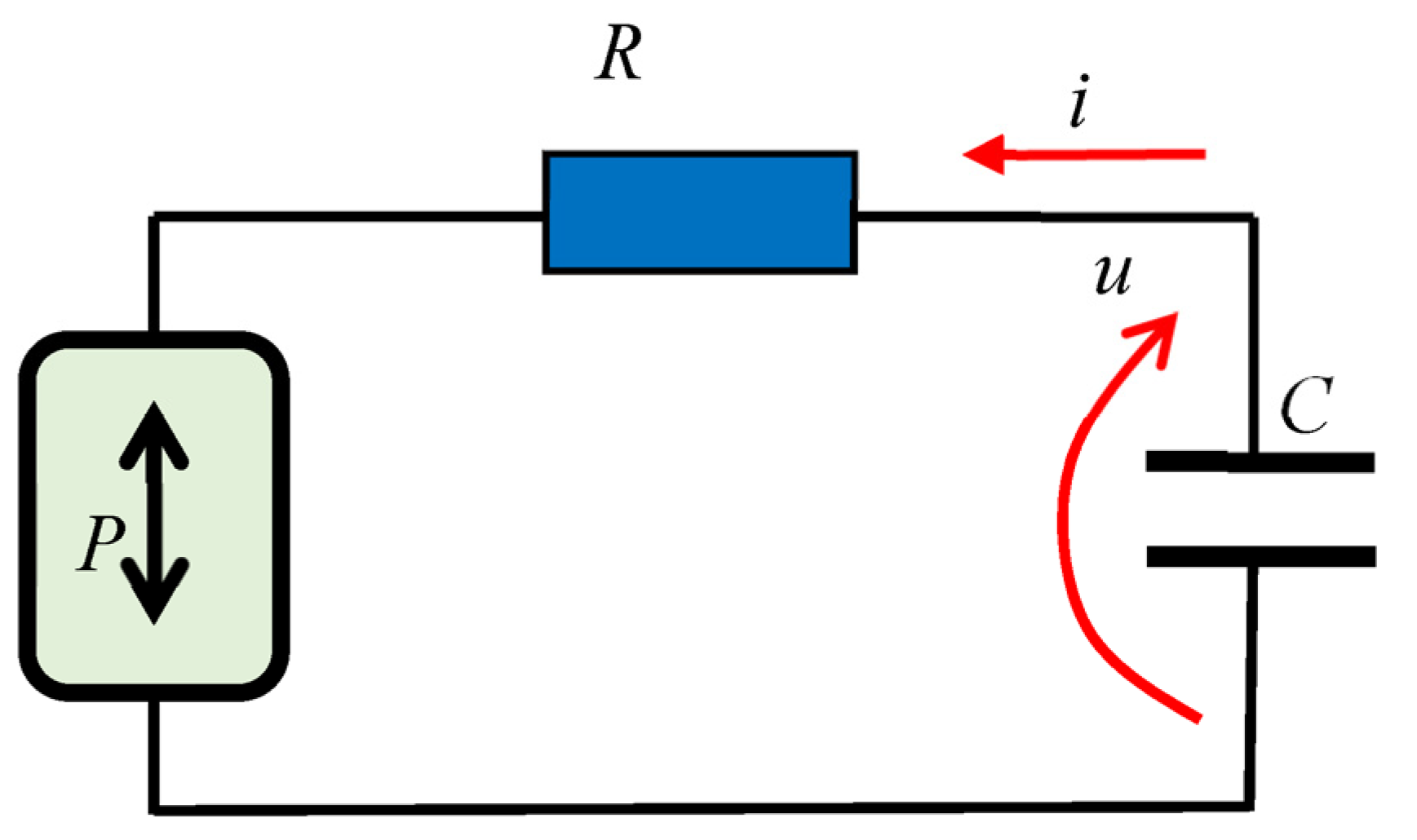
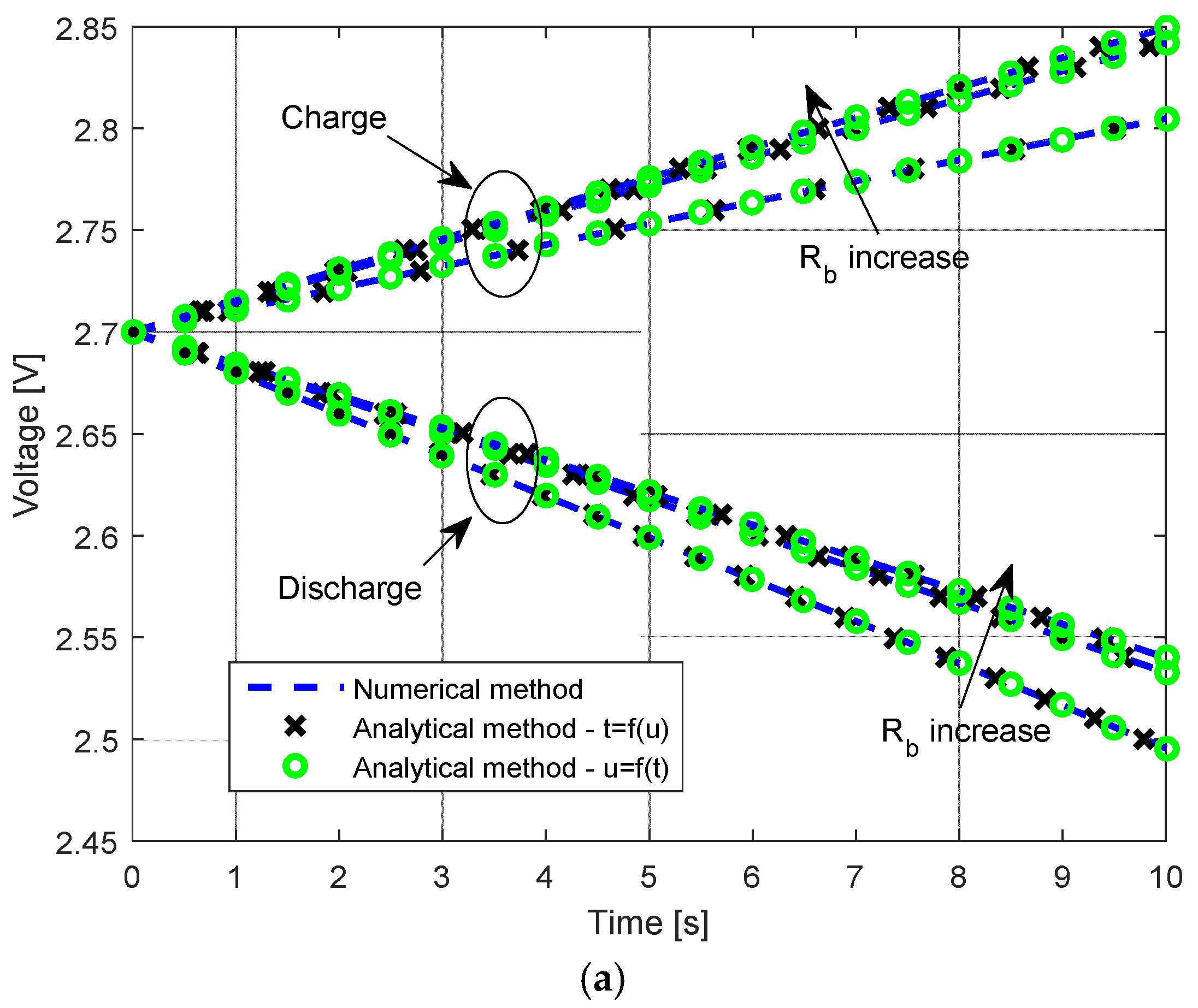
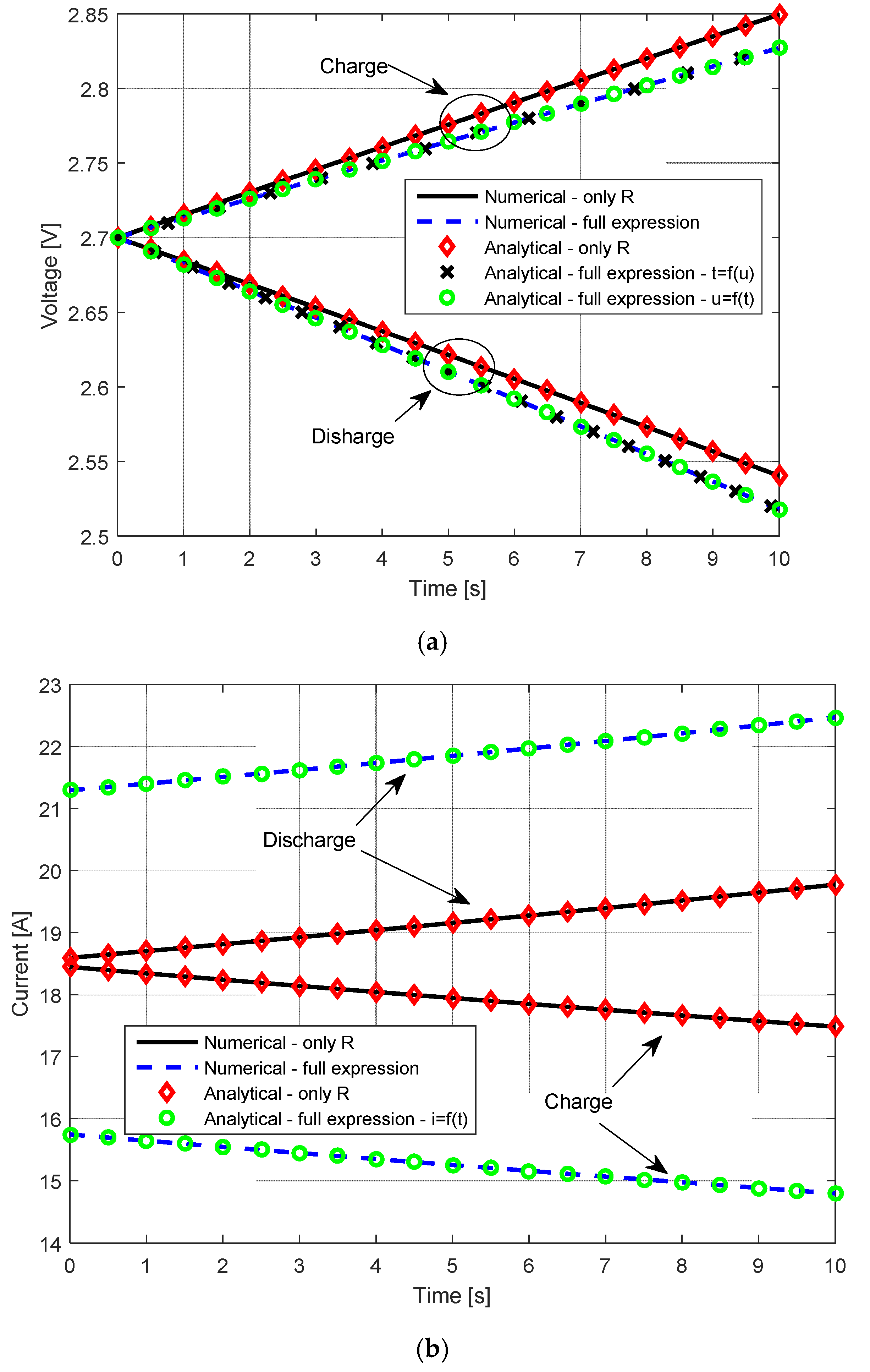
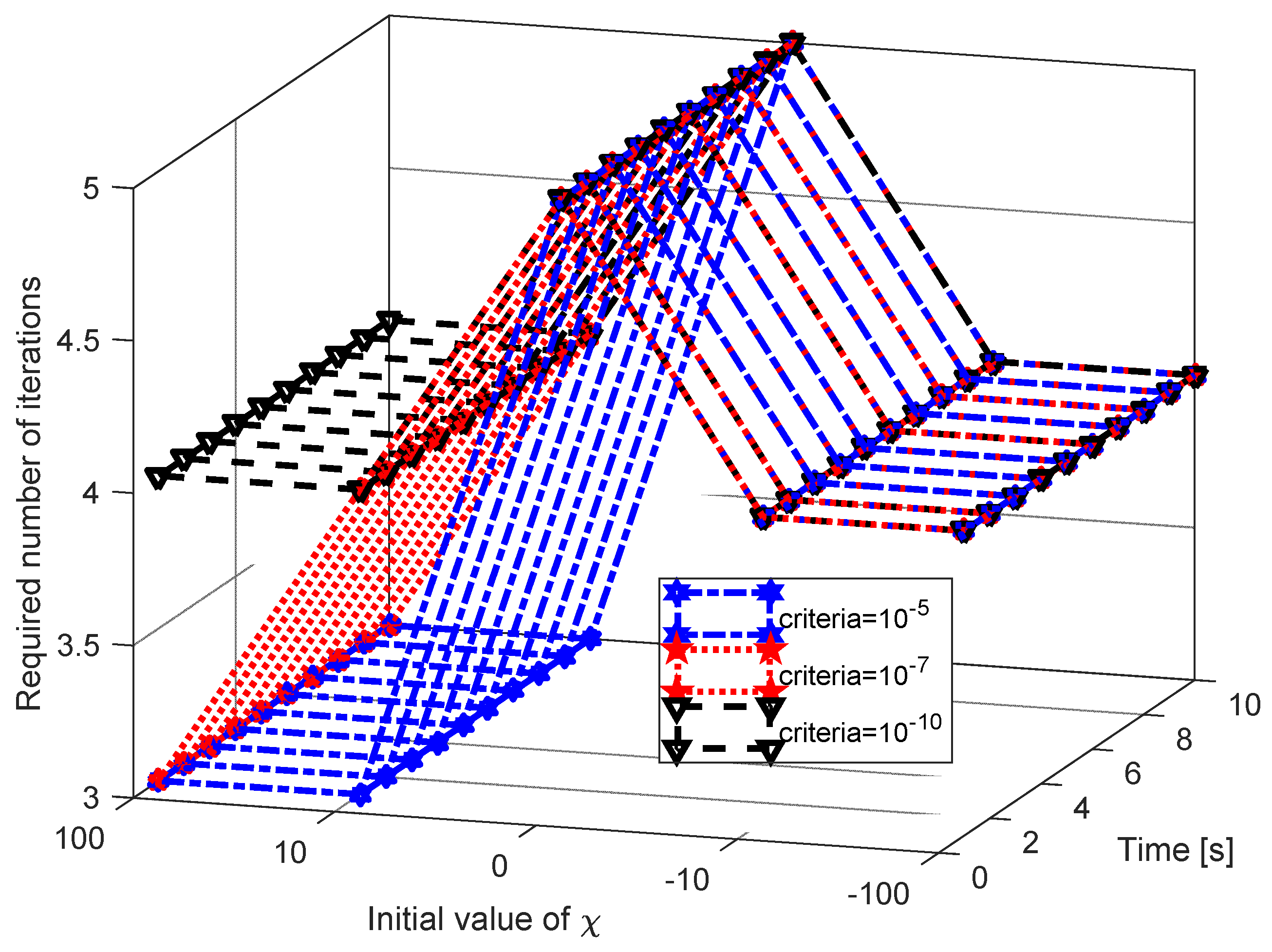
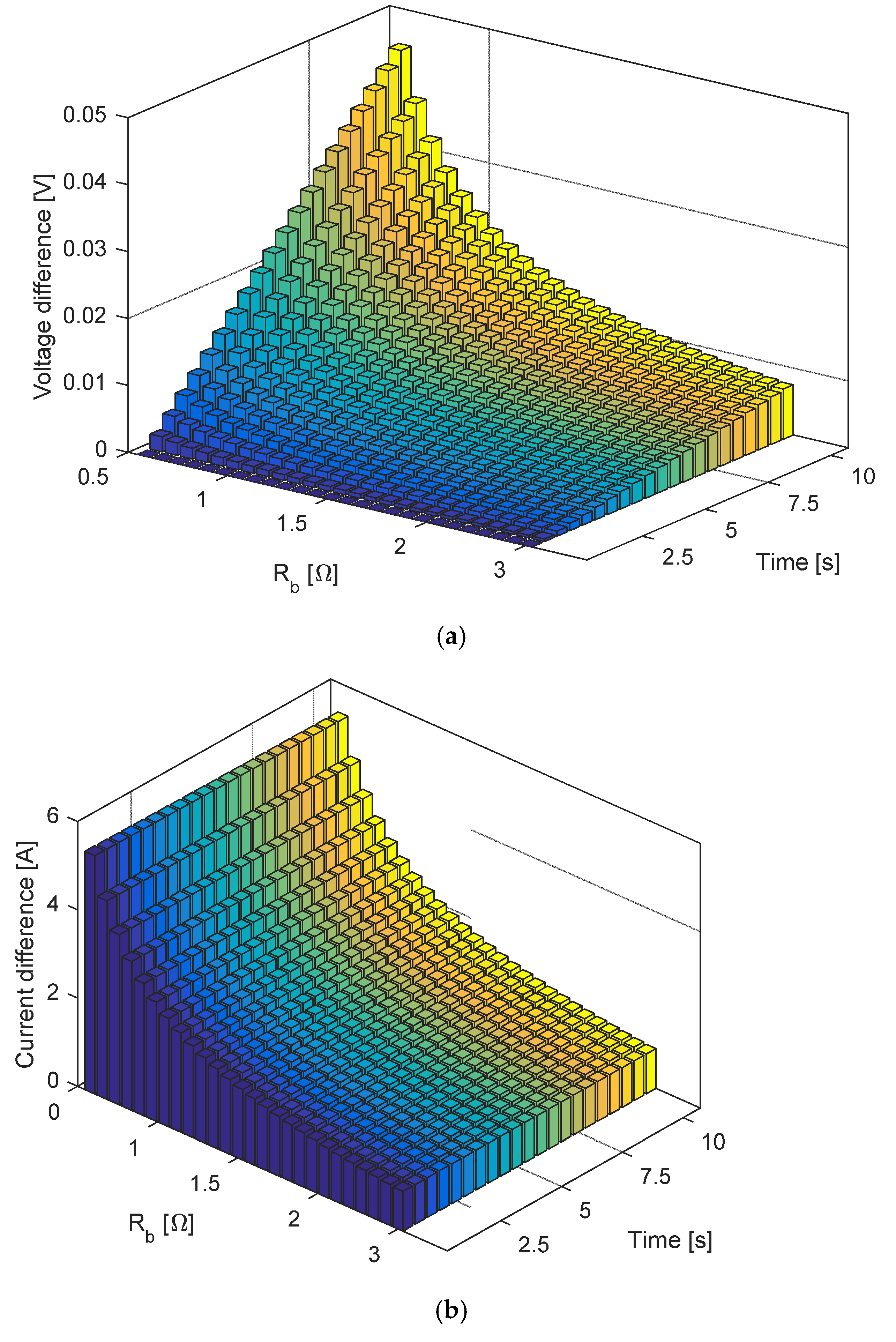
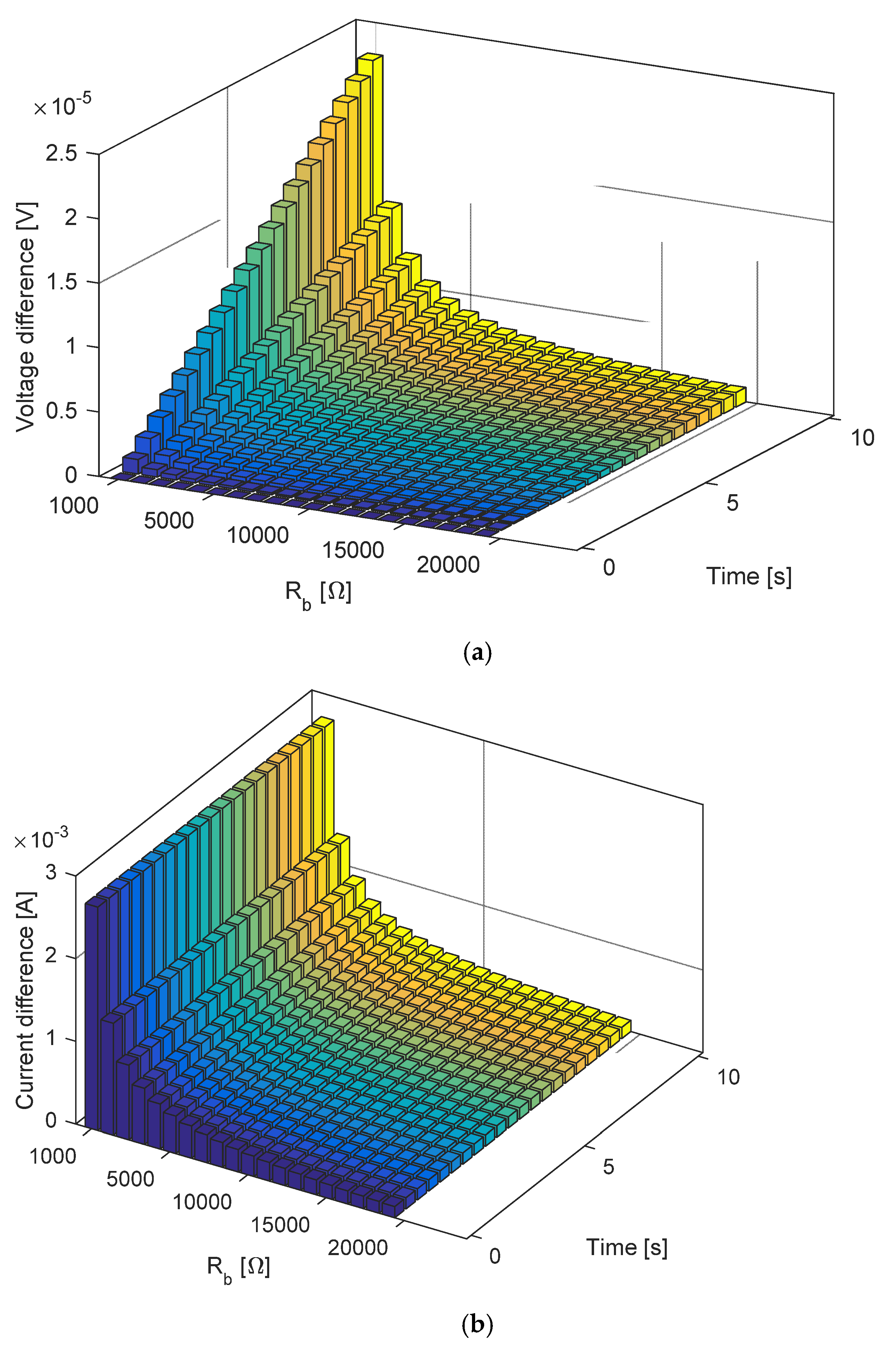
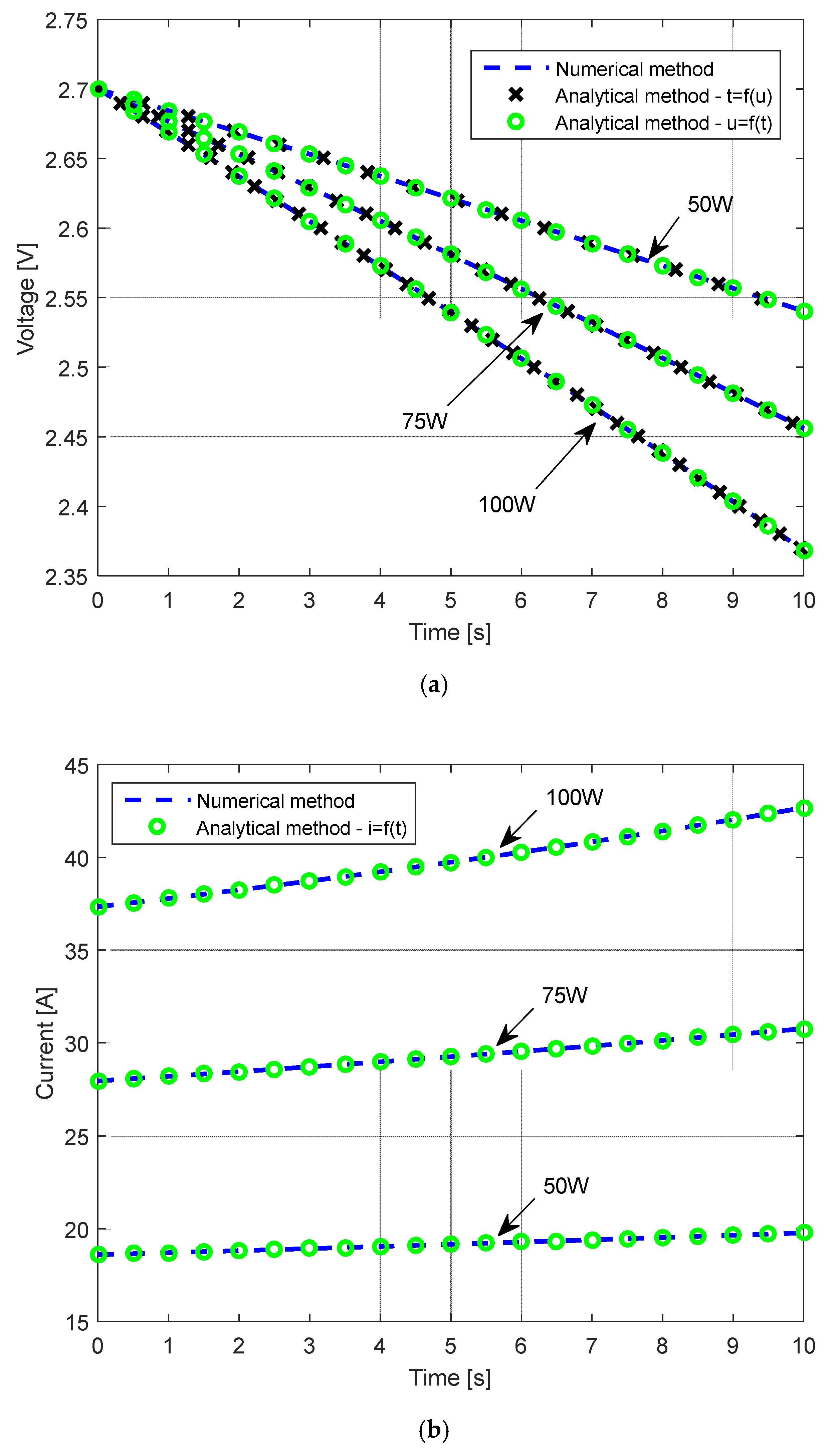
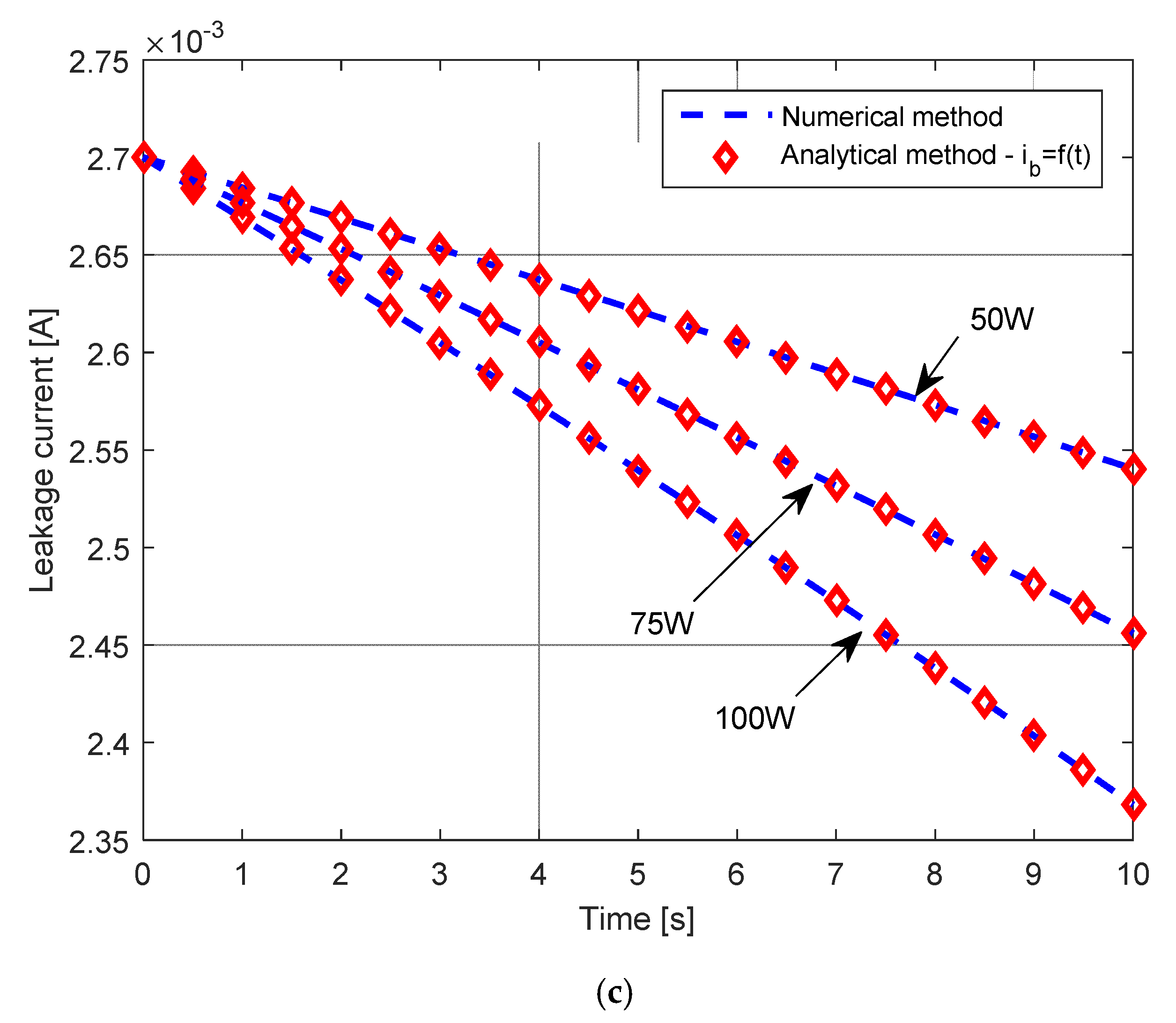
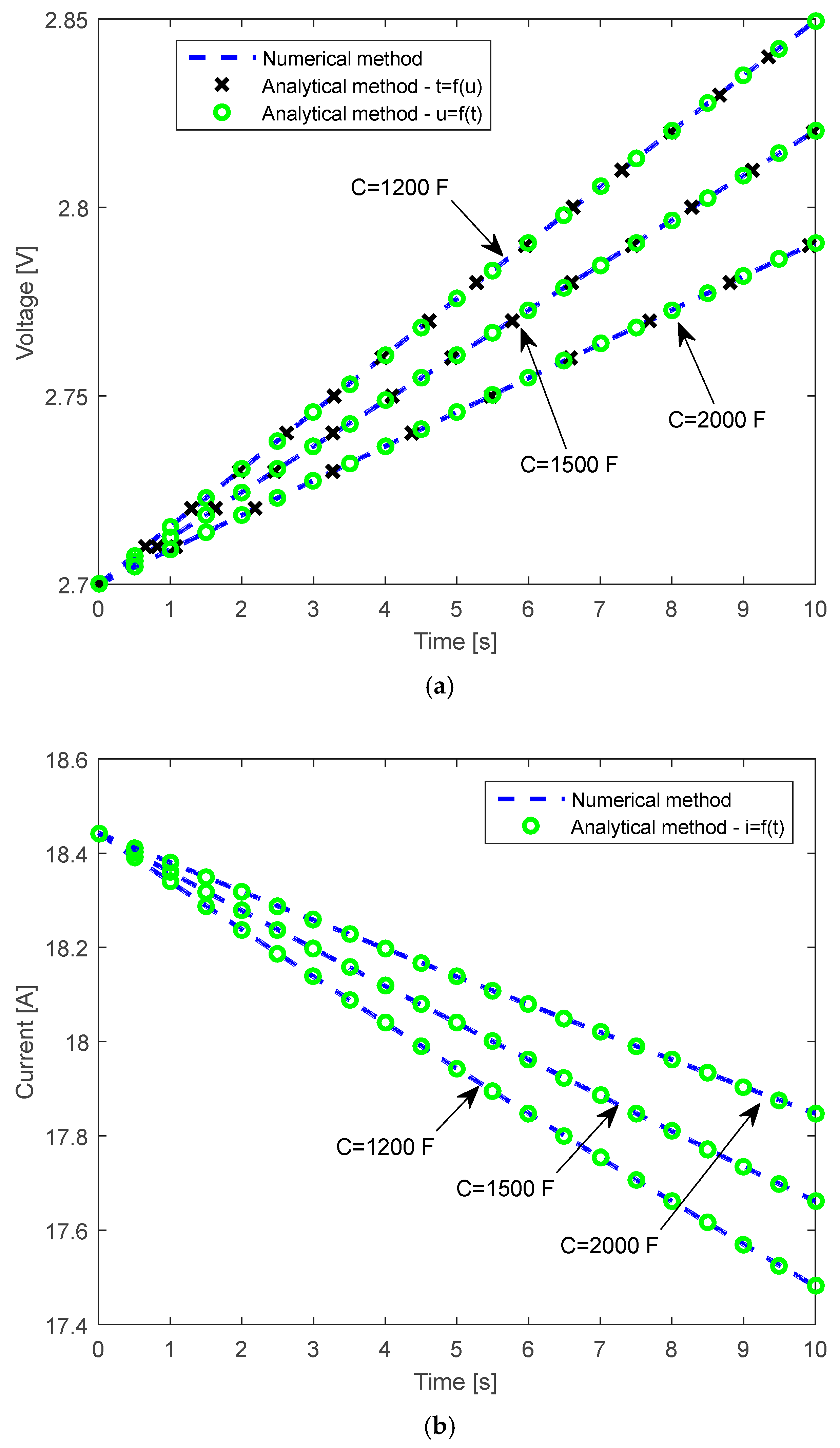
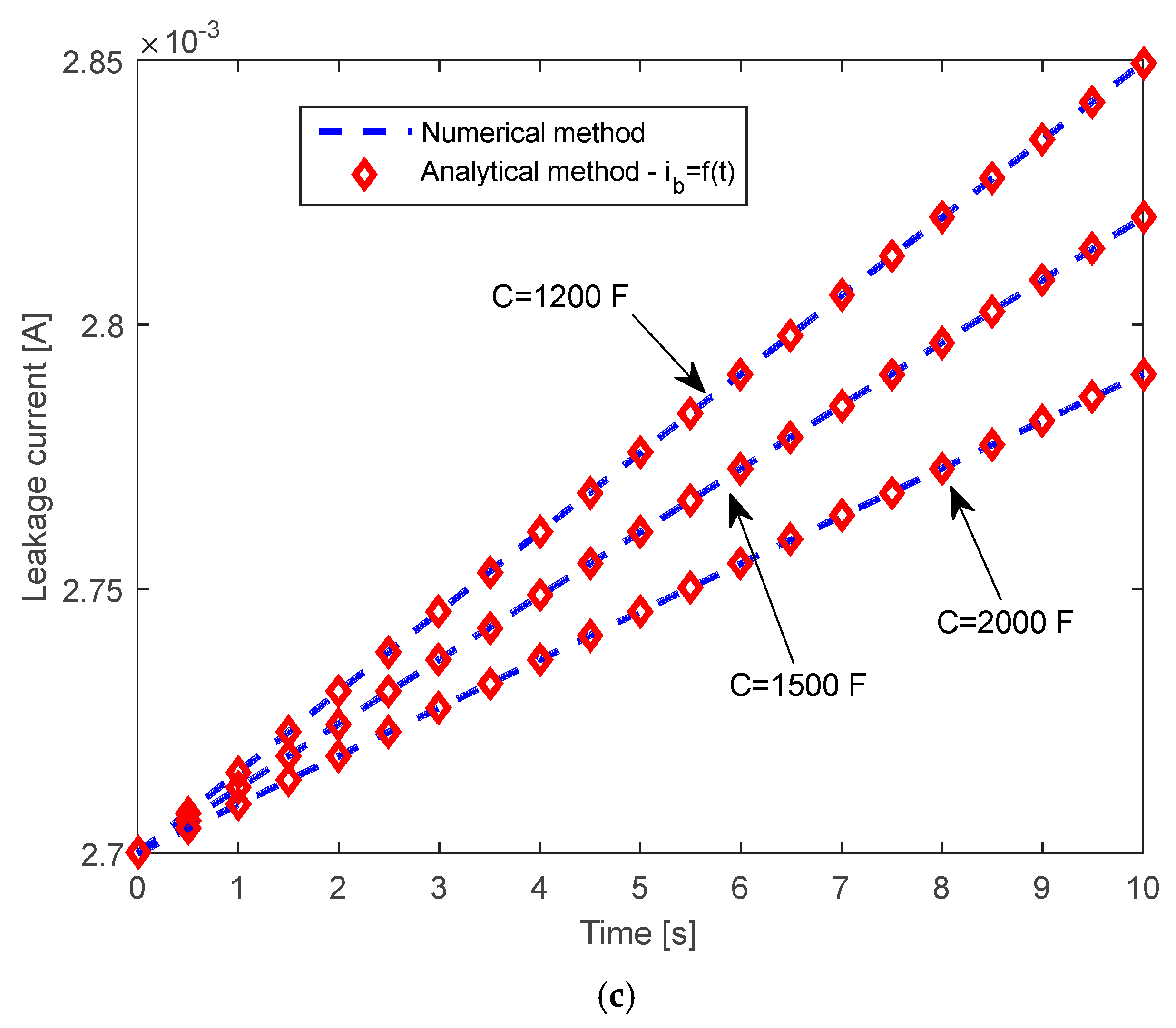
In this direction, this work provides a mathematical analysis of the current and voltage of SCs in the time domain, including a model of leakage current represented by parallel resistance at constant power. Consequently, this research is a continuation of analytical modeling of SC circuits that takes into account real effects during charging and discharging. The proposed analytical expressions make it possible to directly calculate the SC voltage and all currents in the SC model involved in charge/discharge processes as a function of time. In mathematical terms, the current-time and voltage-time can be expressed as a solution to a specific nonlinear equation, which is what Newton’s method is used to solve. The effect of parallel resistance is investigated by comparing the current-time and voltage-time curves of equivalent circuits with and without parallel resistance. The proposed expressions’ accuracy is compared with the results obtained using traditional methods based on numerical integration. A comparative analysis of the results is also presented; this determined when the leakage current effect is ignored.
The Newton method, also known as the Newton—Raphson method, is a popular iterative method for solving nonlinear equations. Over the years, various variants of the Newton method have been developed to address challenges in solving nonlinear equations, such as handling singular or ill-conditioned Jacobian matrices, improving the convergence rate and global behavior, and incorporating additional information such as constraints or second-order information.
Recent developments of the Newton method include globalized Newton methods to enhance the global convergence behavior, such as using trust-region or line-search strategies; inexact Newton methods to relax the accuracy requirement of the Jacobian matrix calculation, which can be more efficient for large-scale problems; Newton–Krylov methods to combine the Newton method with Krylov subspace methods, which can be more effective for sparse problems or problems with high dimensions; and parallel Newton methods to distribute the computation and communication of the Newton method across multiple processors to speed up the computation. The Newton method has been applied in various scientific communities, such as engineering, physics, economics, and computer science. Some examples of its applications include optimization—solving nonlinear optimization problems, such as finding the minimum of a function [
29], dynamics—solving nonlinear ordinary or partial differential equations, such as modeling the motion of mechanical systems or fluid flows, data analysis—solving nonlinear inverse problems, such as estimating the parameters from observed data, and machine learning—solving nonlinear equations from machine learning models, such as deep neural networks or support vector machines. The literature shows improved versions of the standard Newton method [
30,
31,
32]. For further details, a comparison of Newton–Raphson solvers for power flow problems is provided in [
32].
The main paper contributions of this work are summarized as follows:
In this paper, an accurate SC model is mathematically analyzed.
The analytical expressions for current and voltage change via time are derived in both the charging and discharging processes.
The comparison of results with and without the usage of parallel resistance in the SC model is investigated.
The mathematical expressions derived for current and voltage are accurate and do not require any other mathematical formulations.
The structure of this article is as follows:
Section 2 provides essential information regarding the mathematical modeling of SCs without leakage current.
Section 3 offers the SC model with parallel resistance for the leaking current formulation and proposes a mathematical equation for modeling current and voltage analytically. In
Section 4, simulation and numerical findings are provided. Conclusions are presented in
Section 5.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}